摘要:
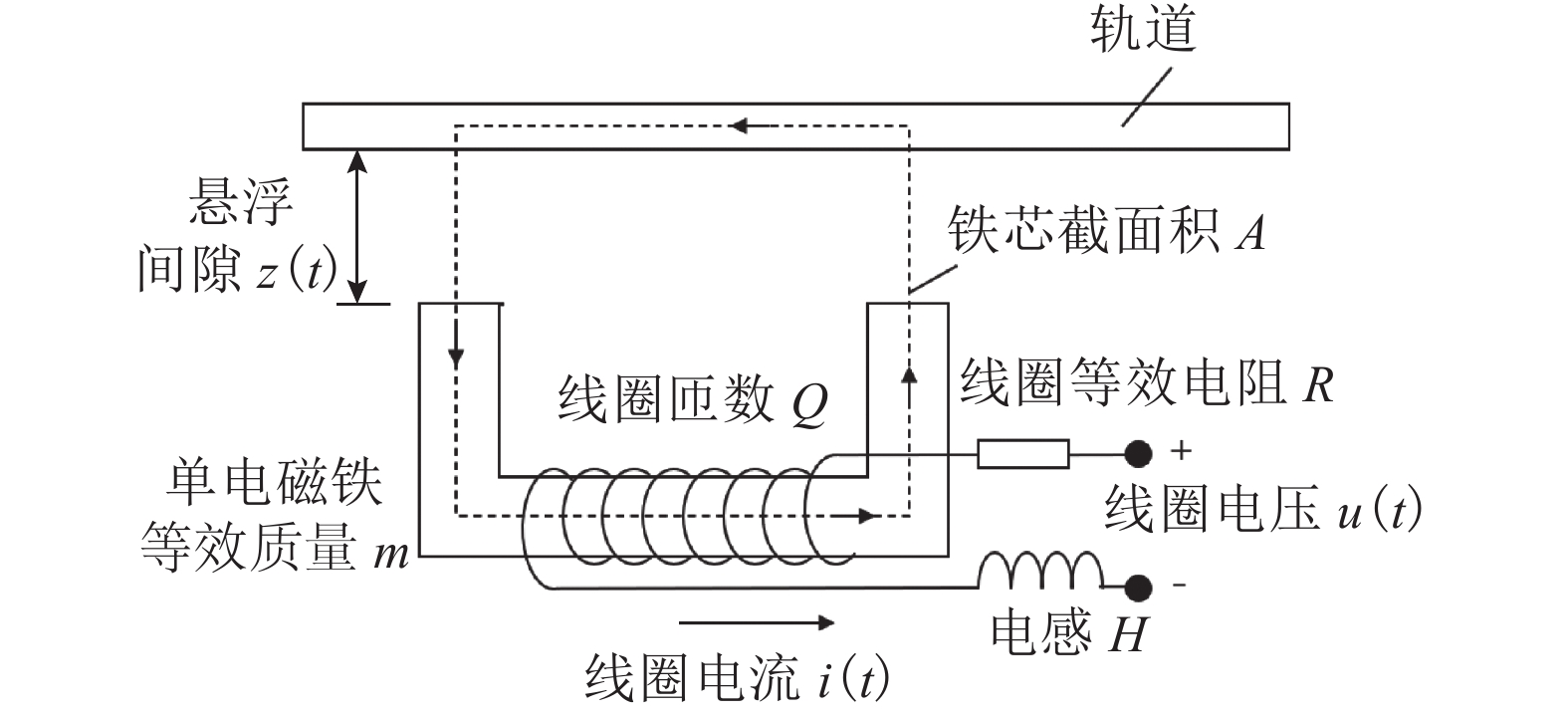
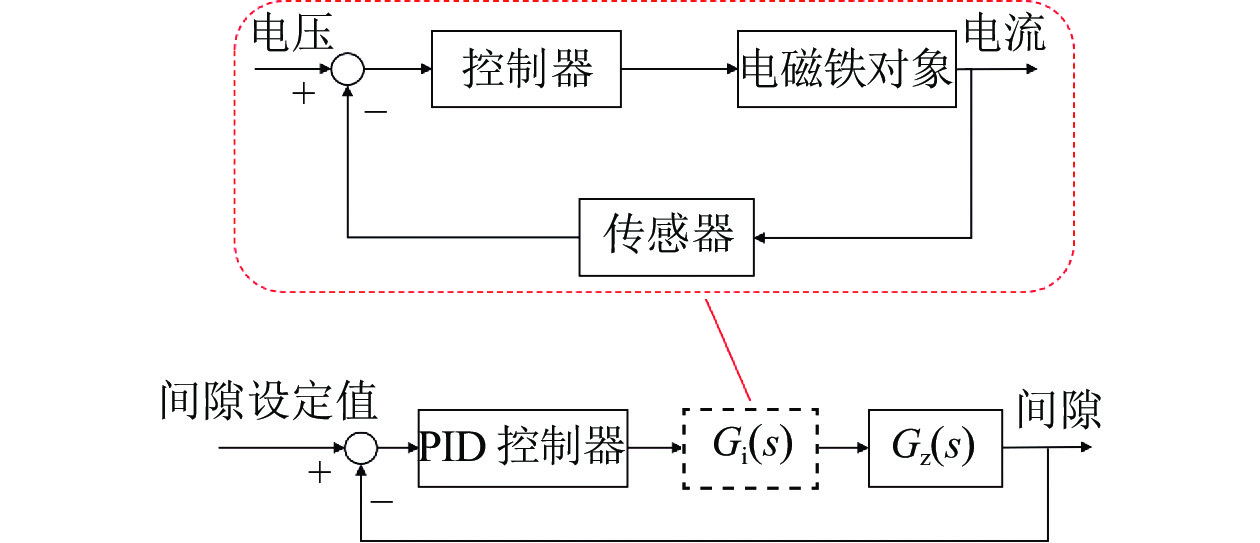
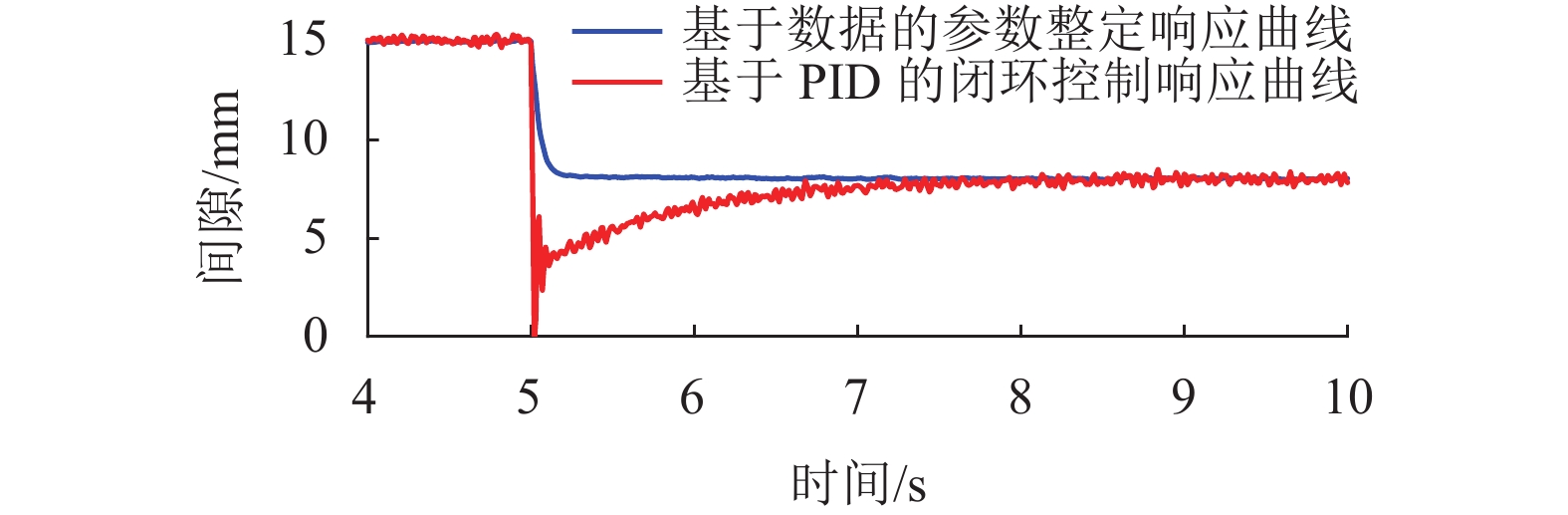
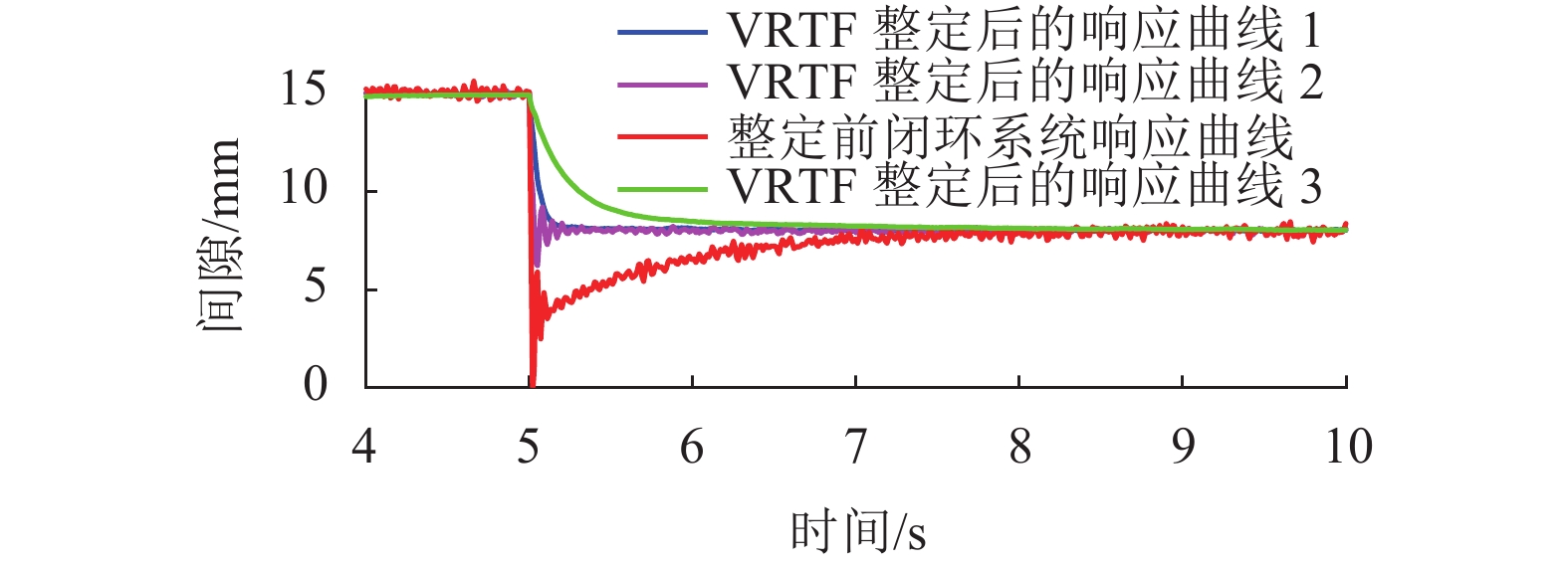
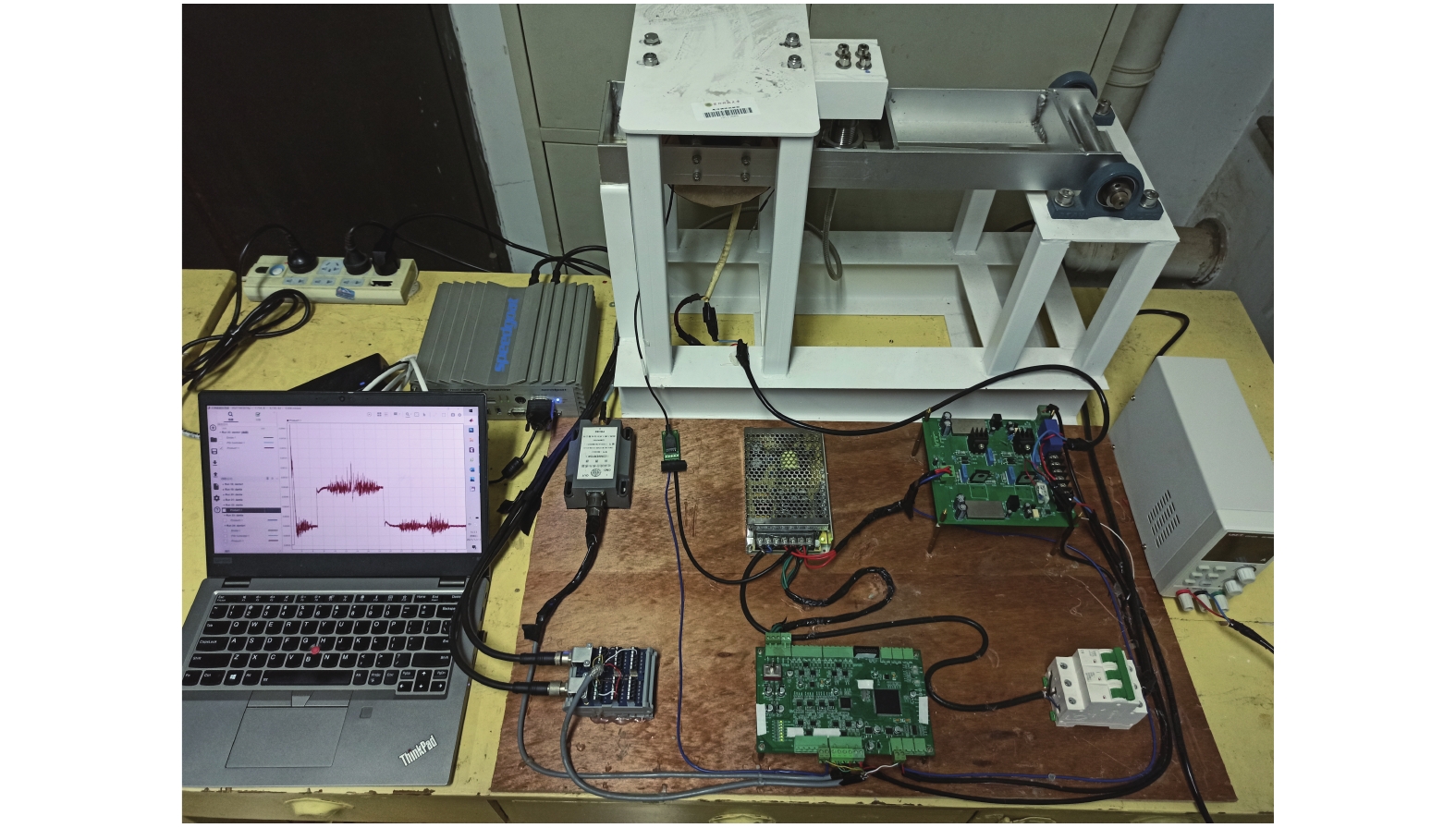
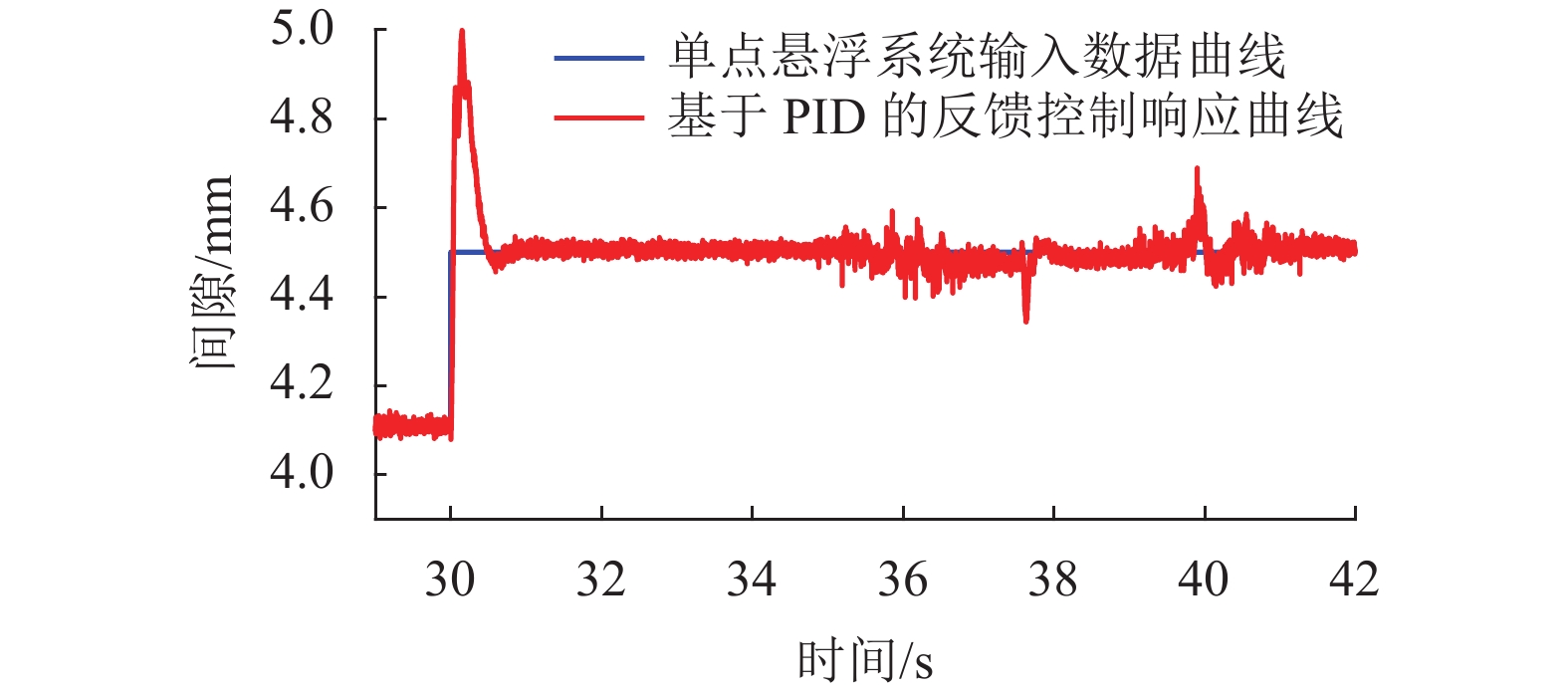
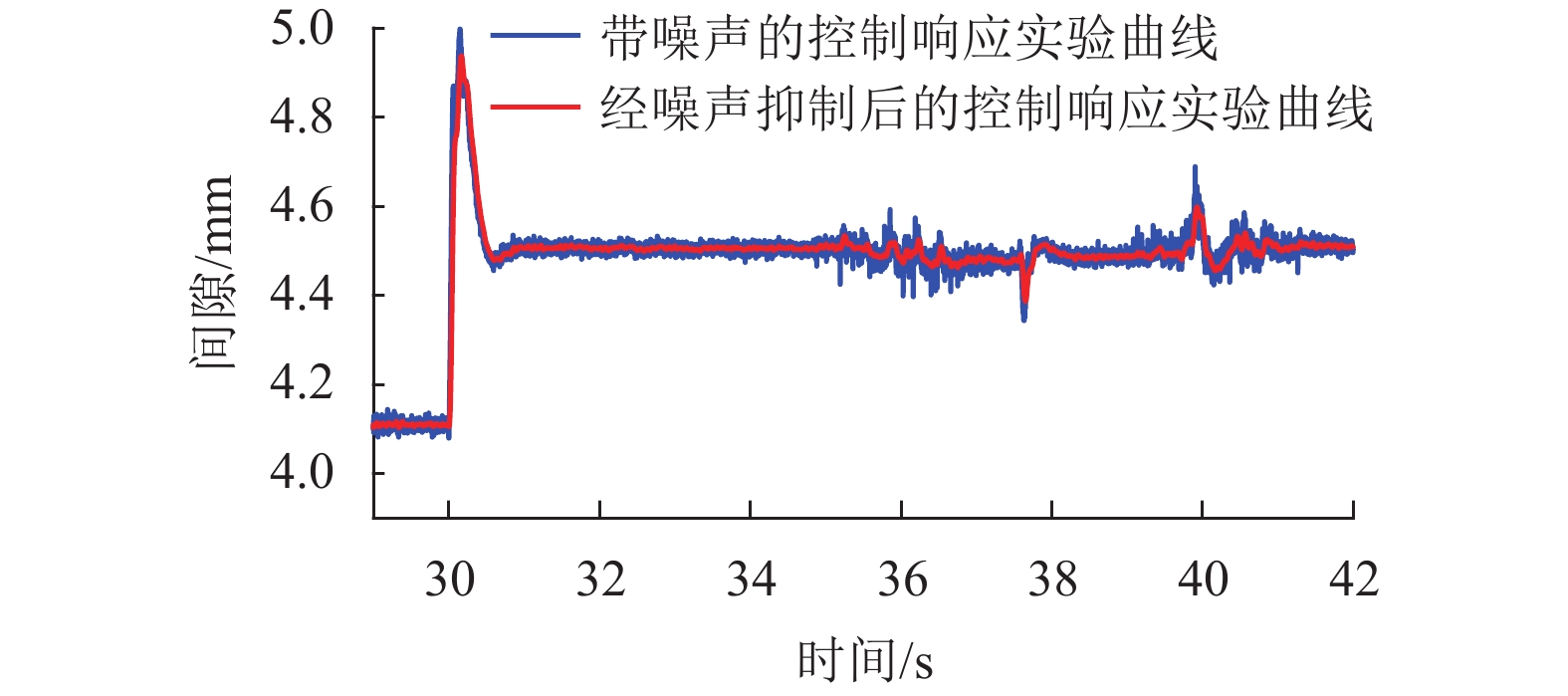
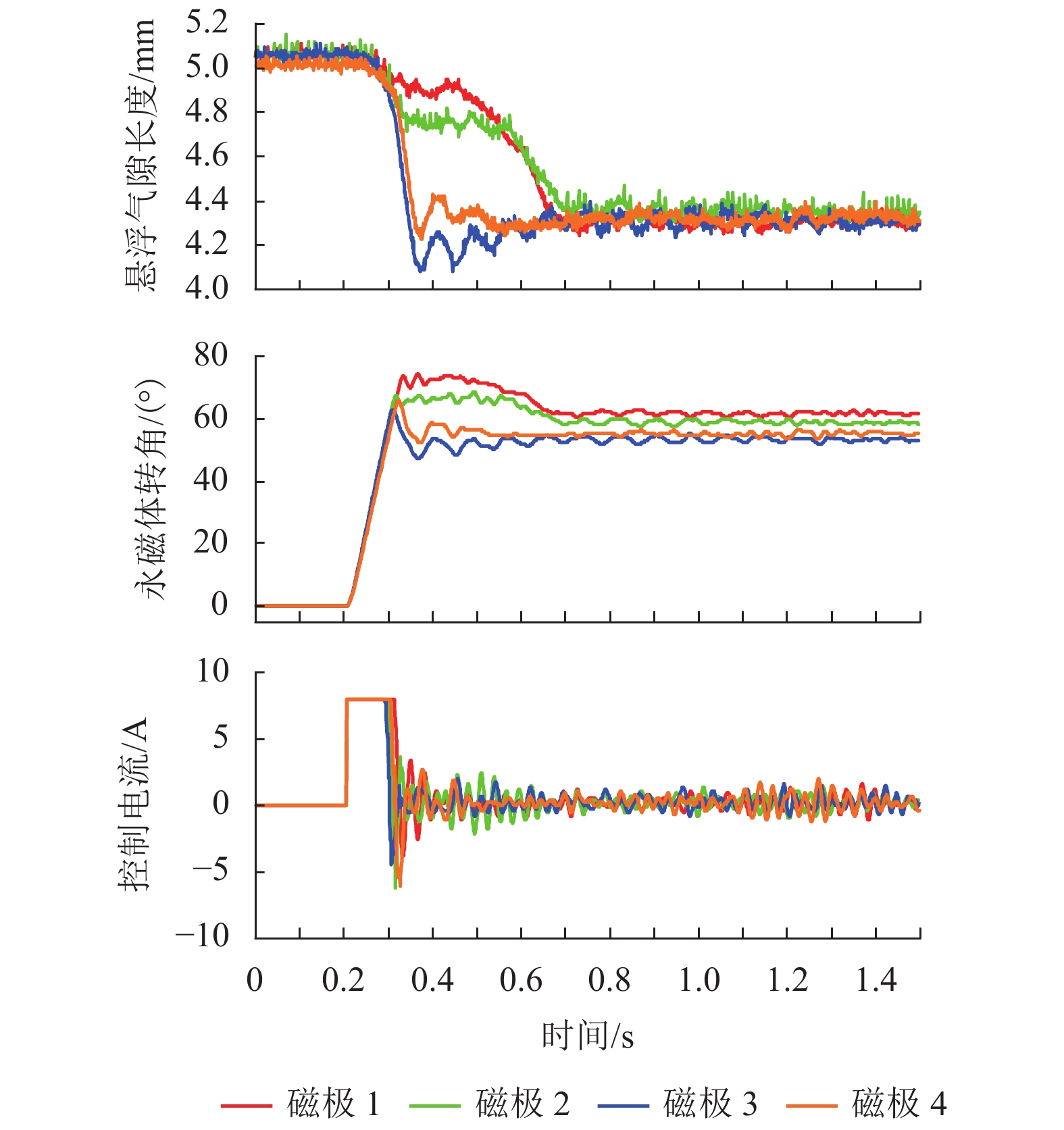
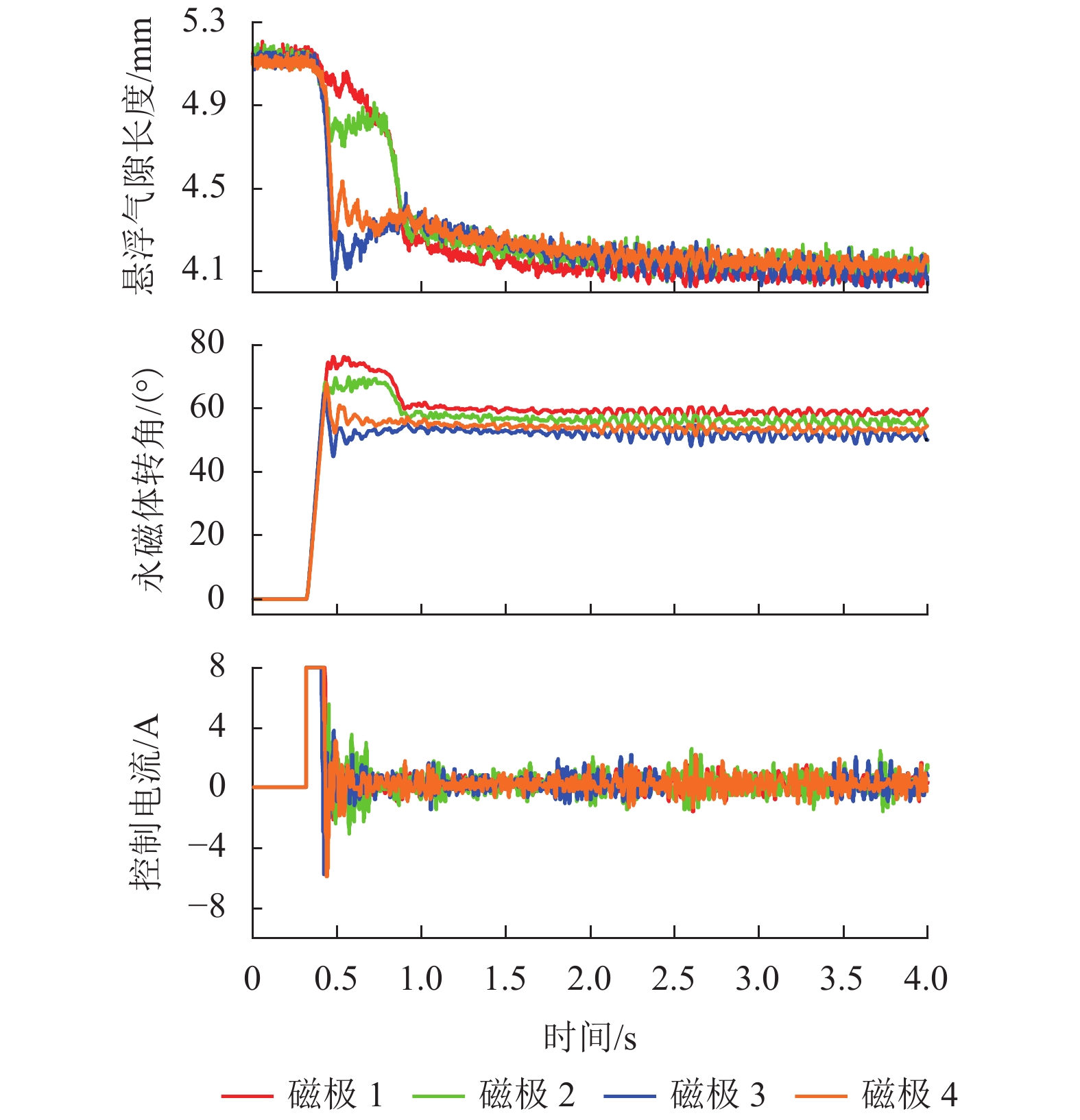
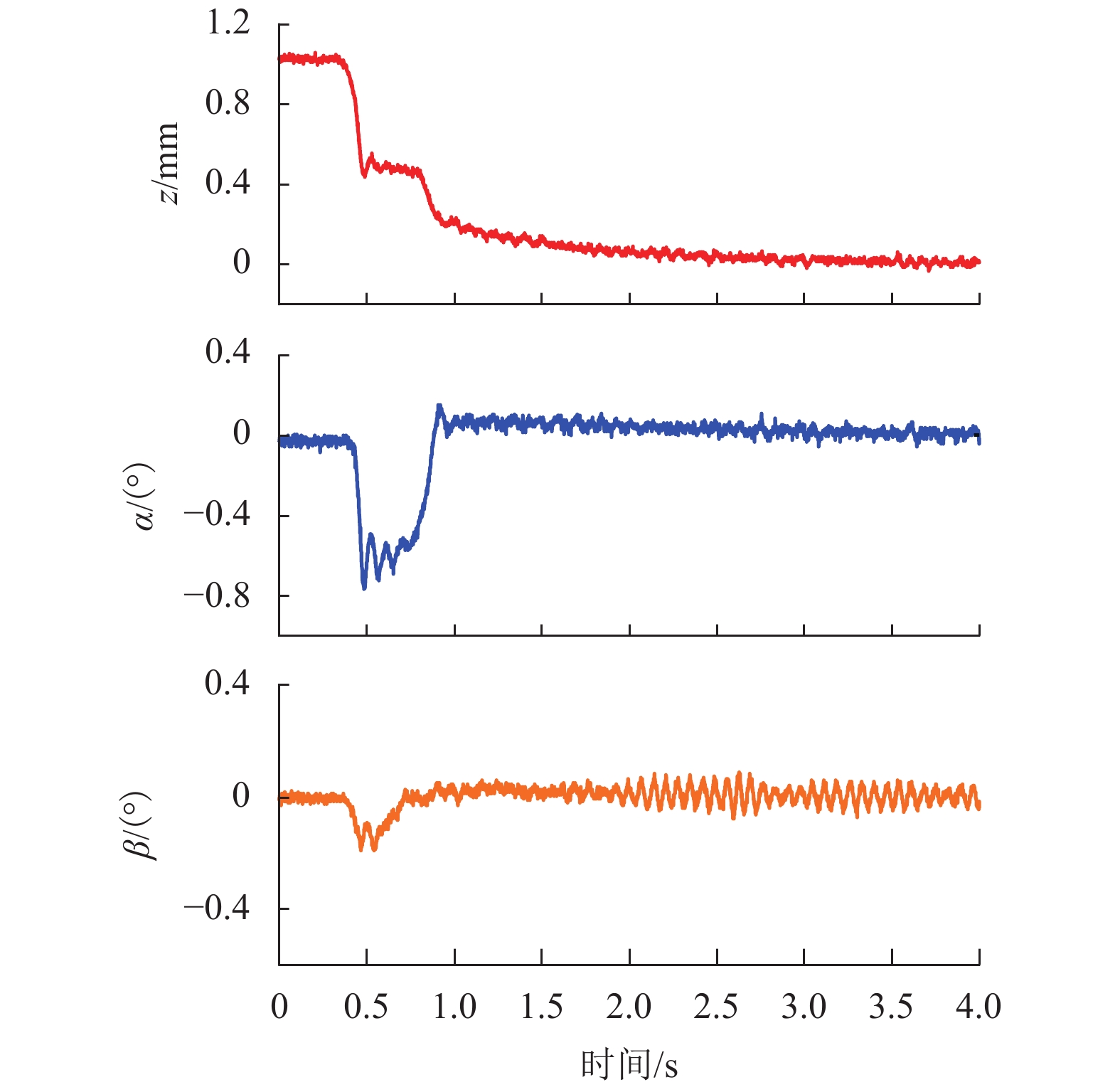
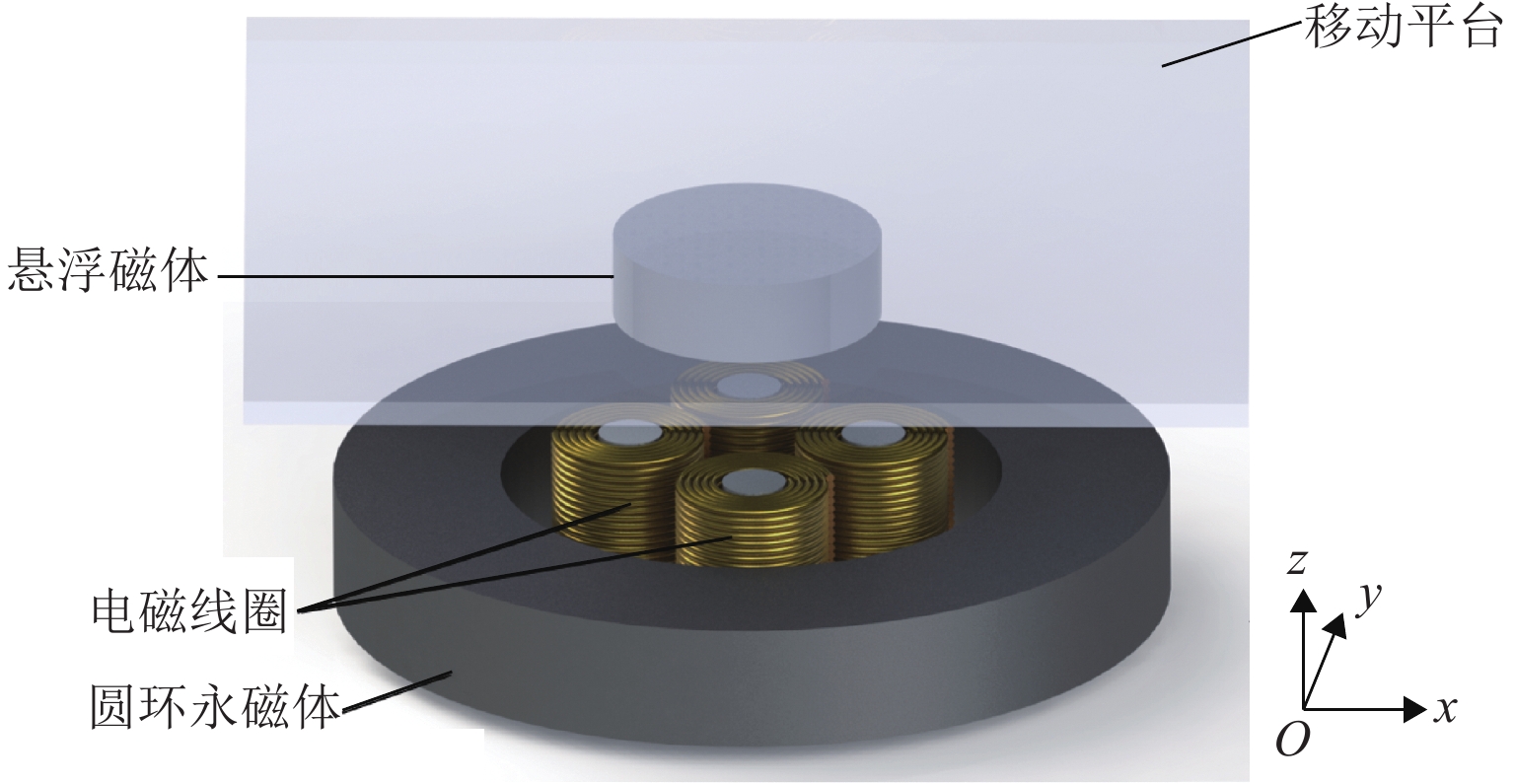
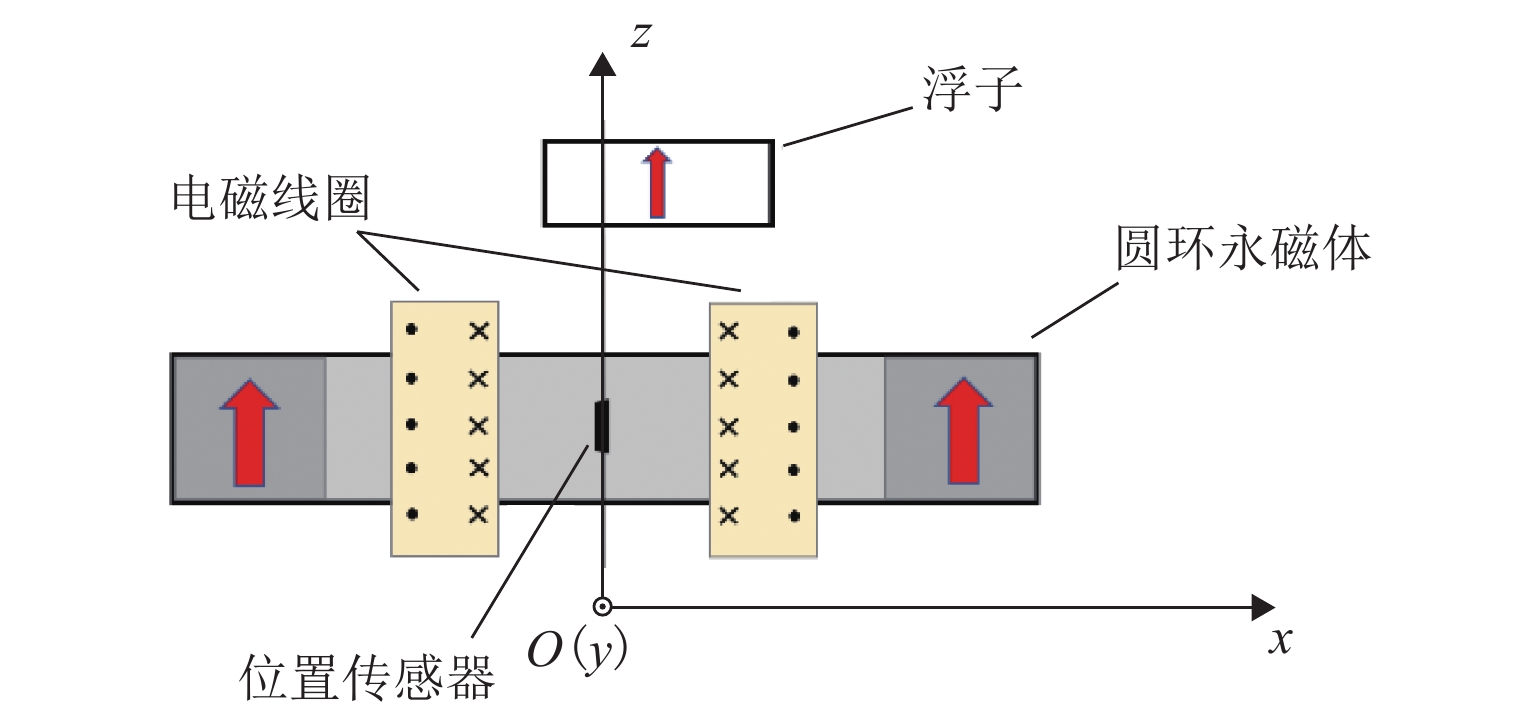
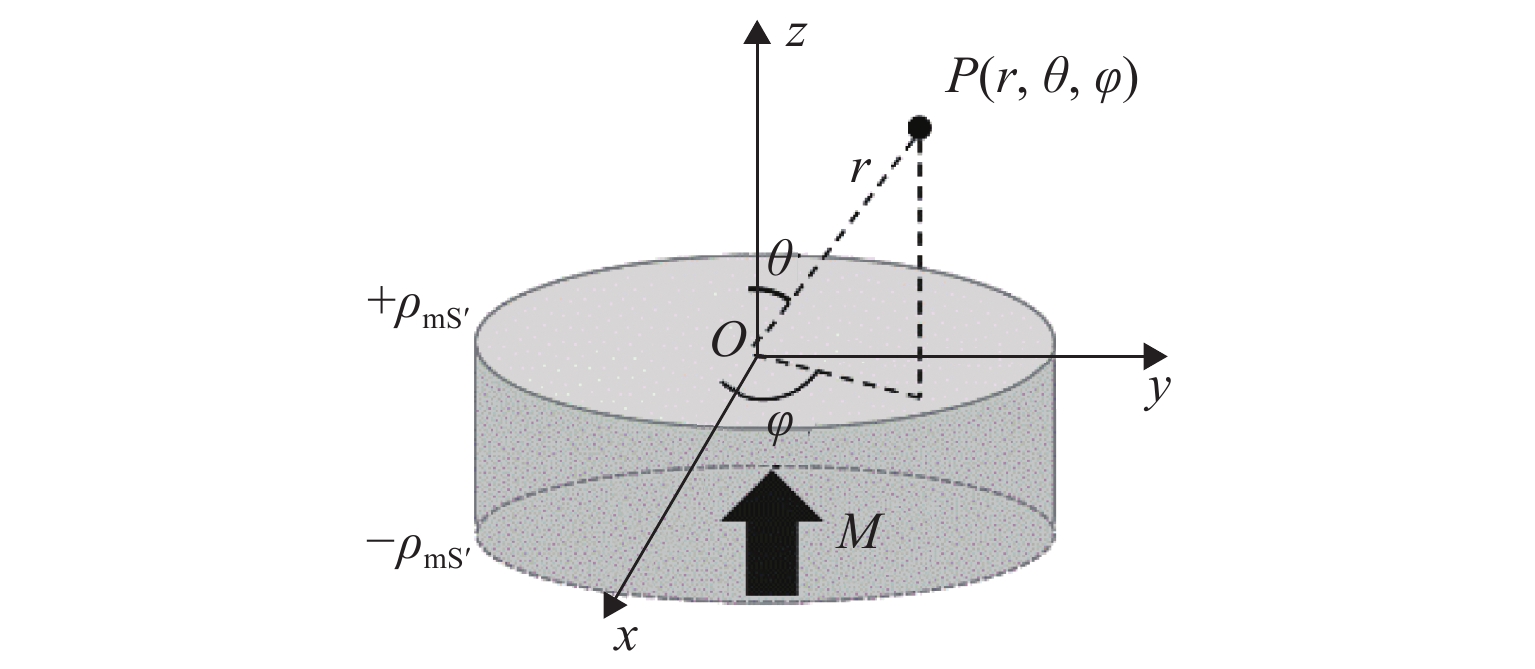
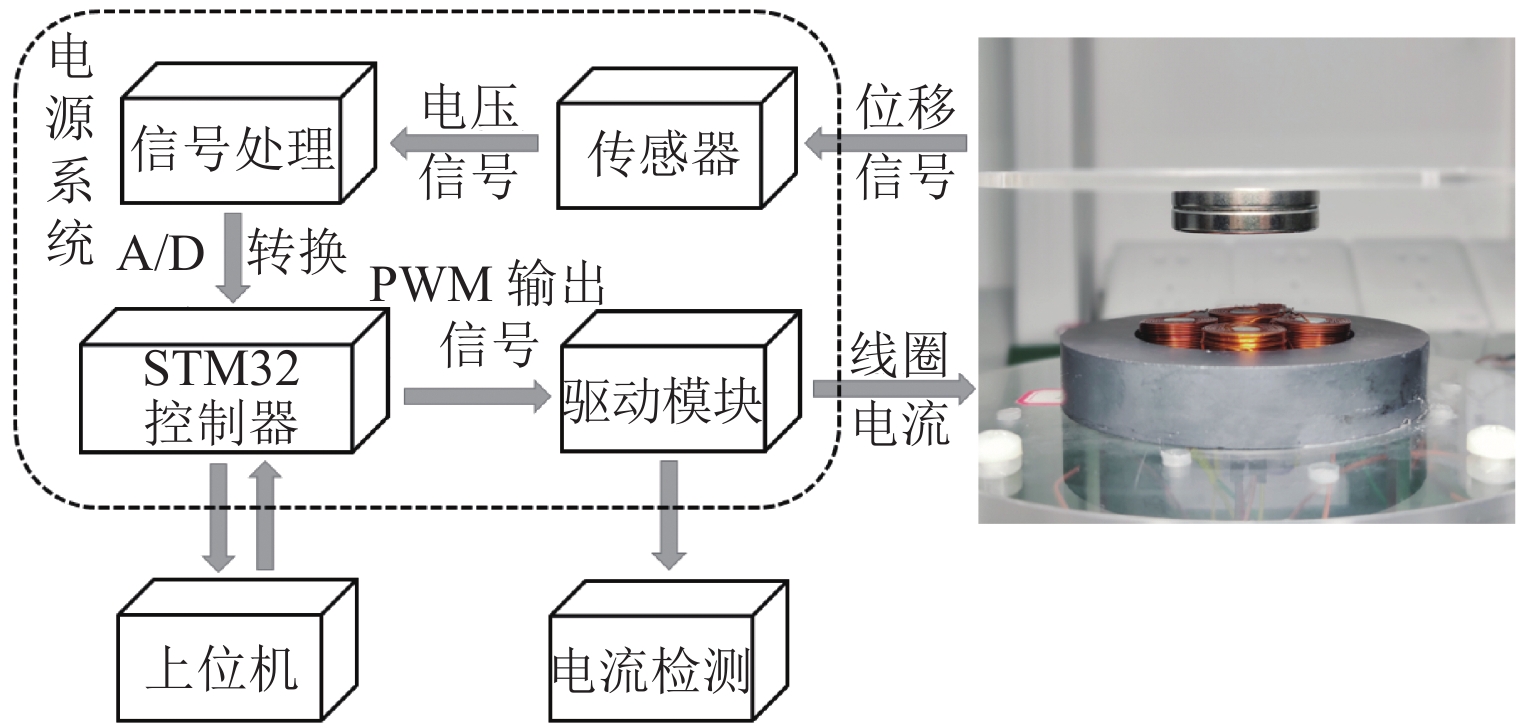
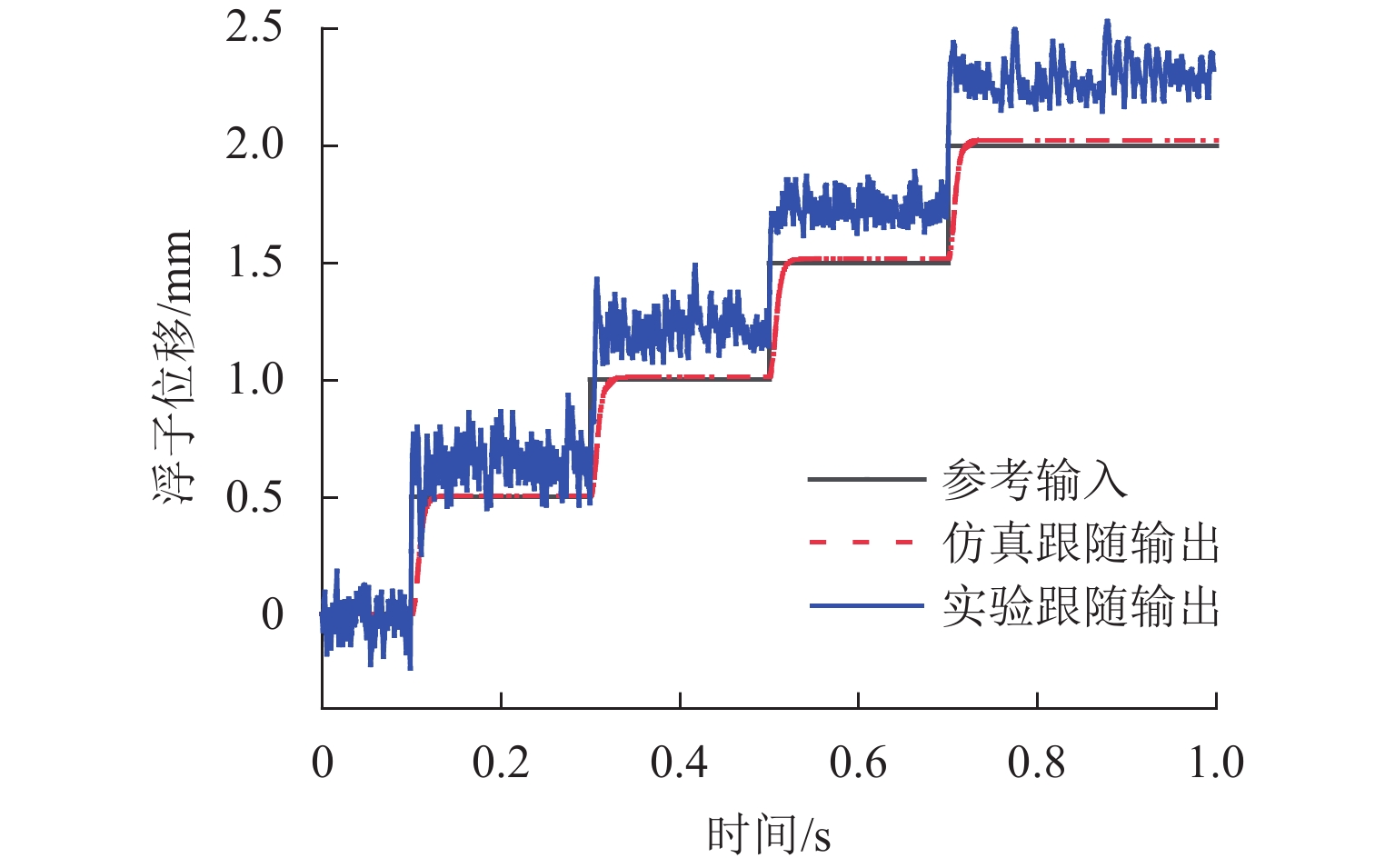
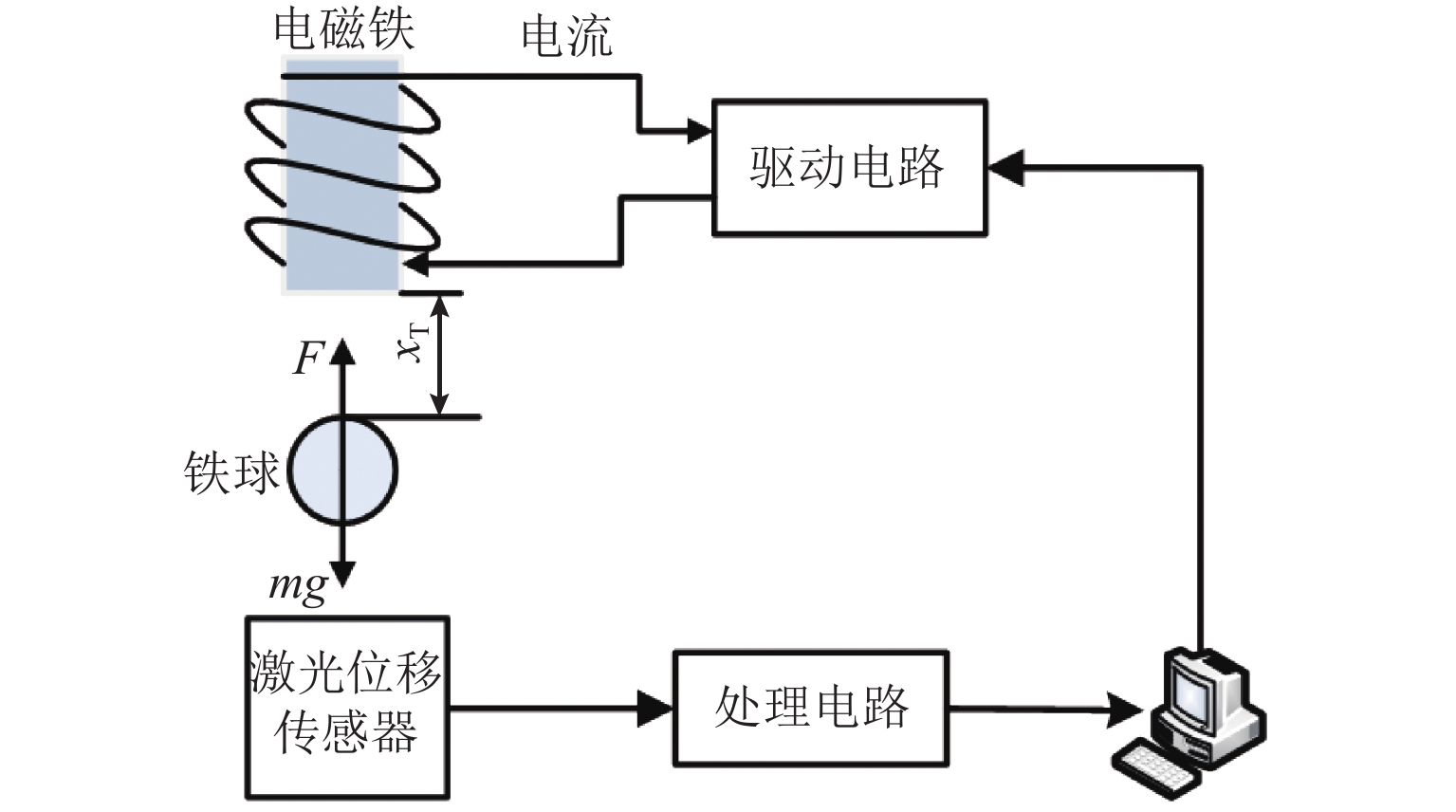
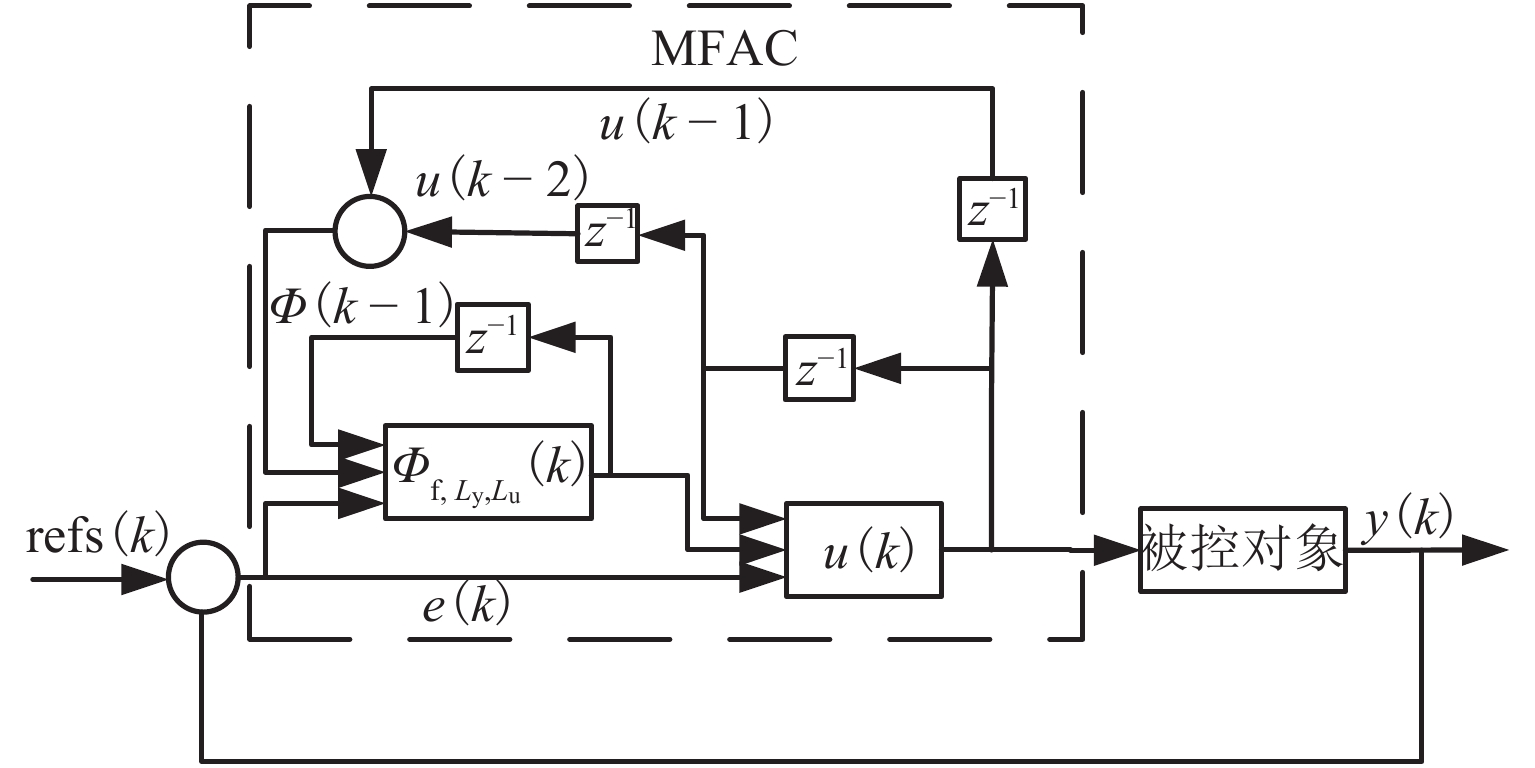
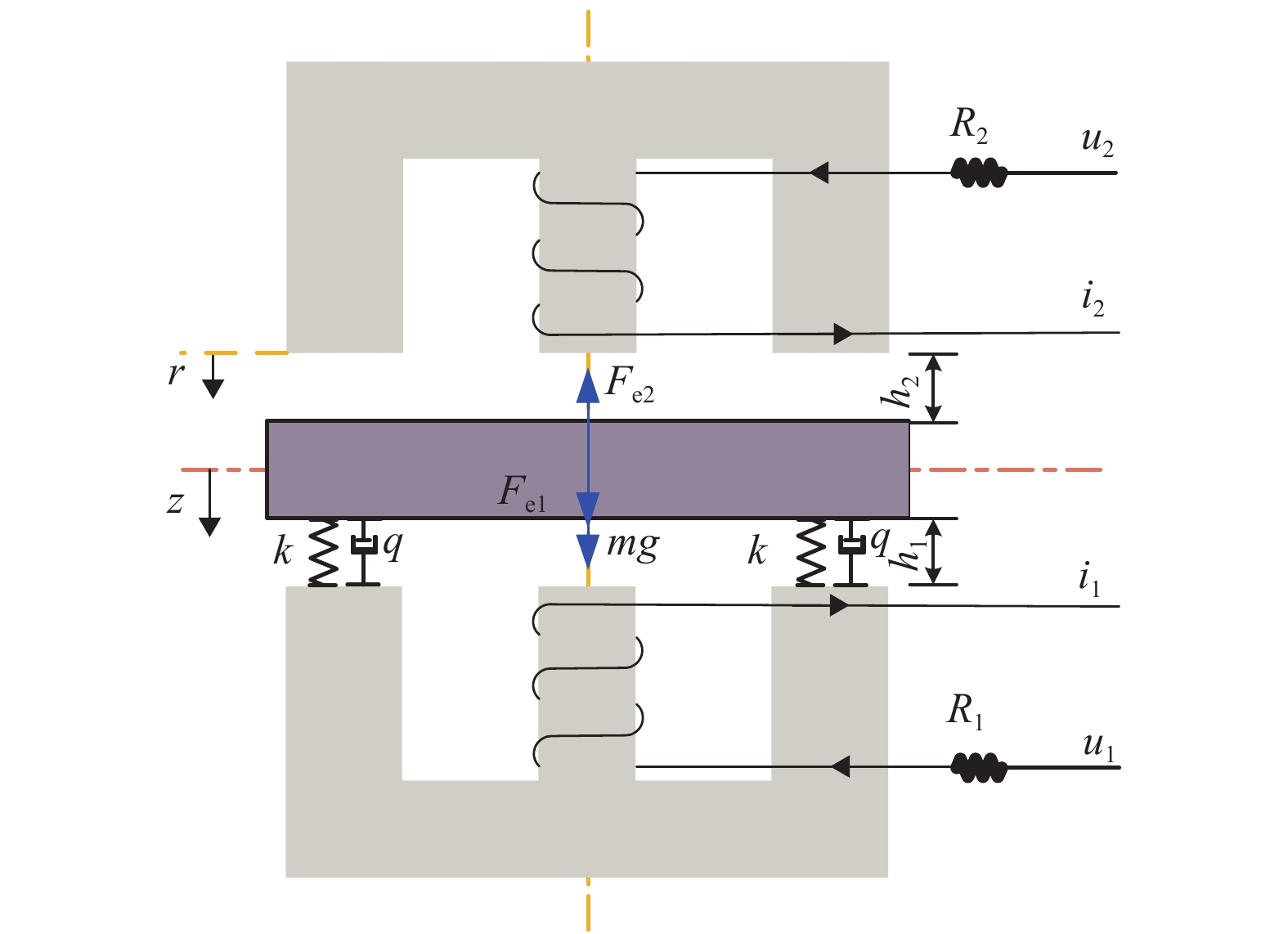
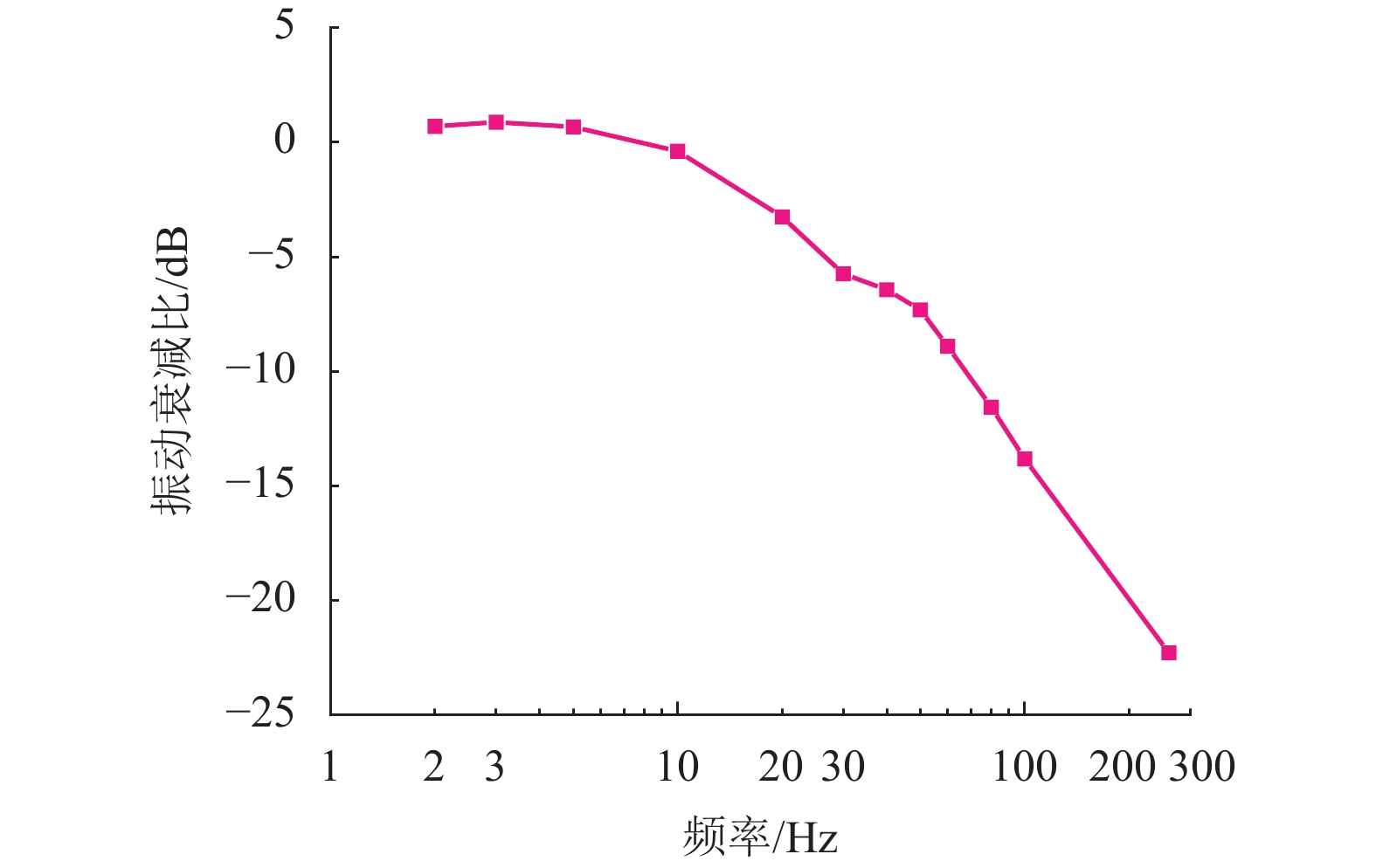
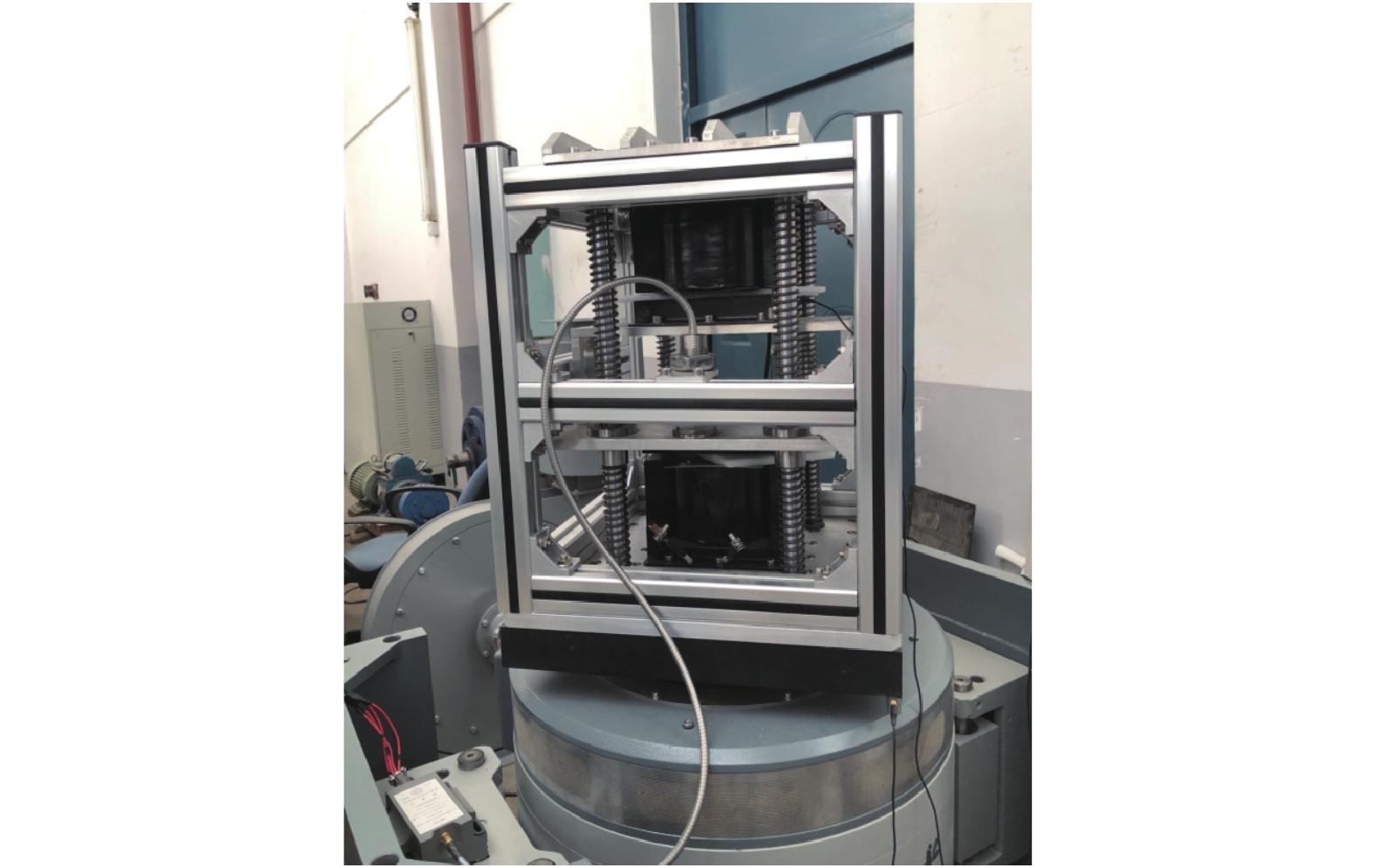
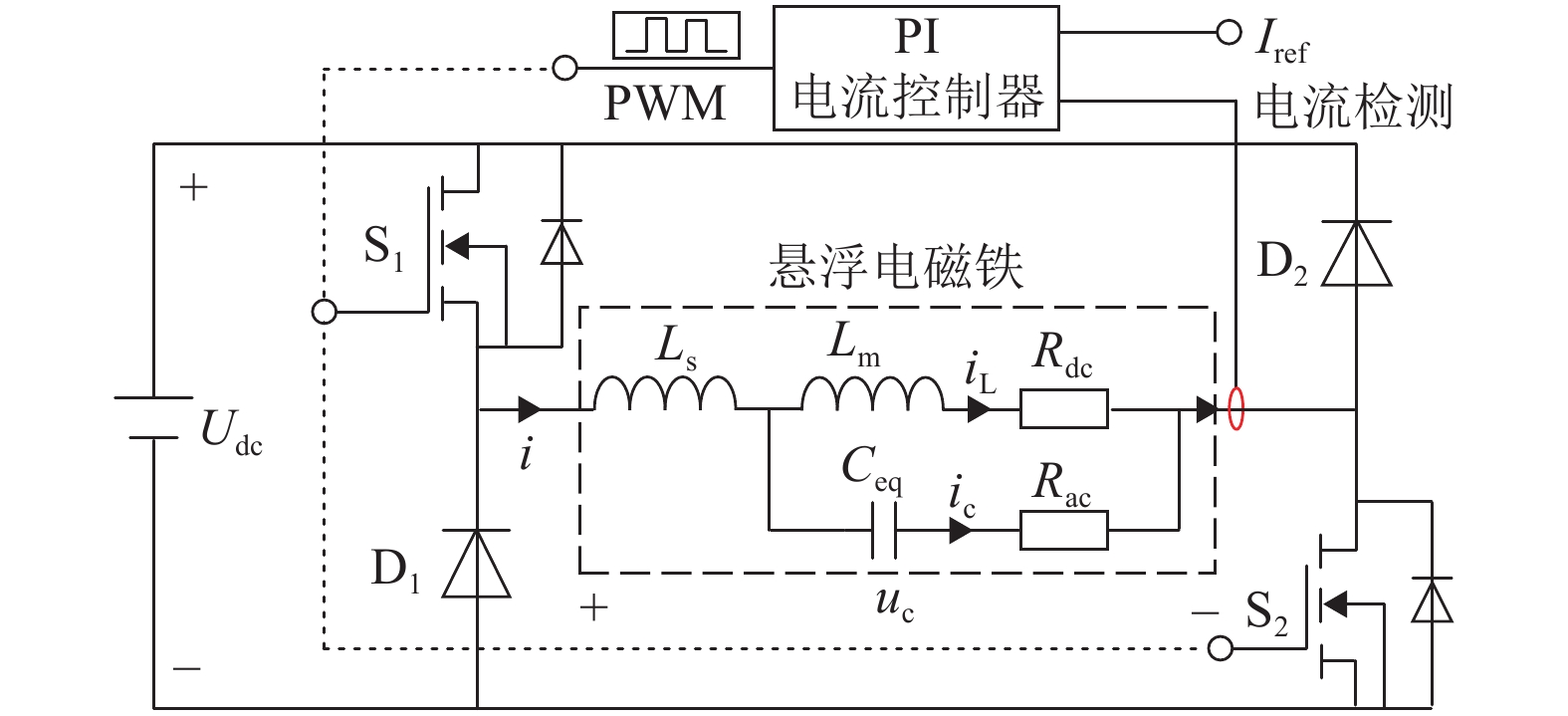
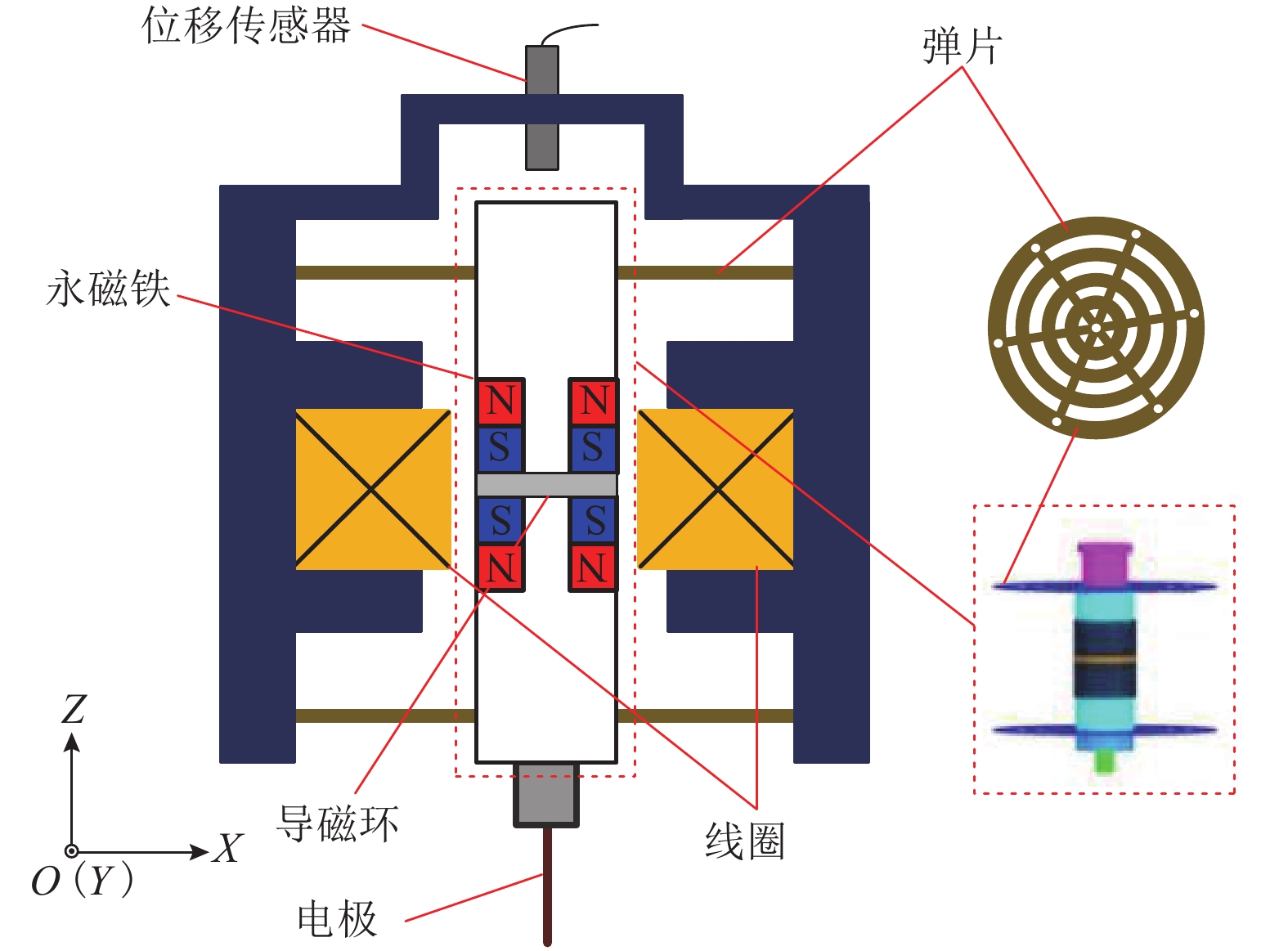
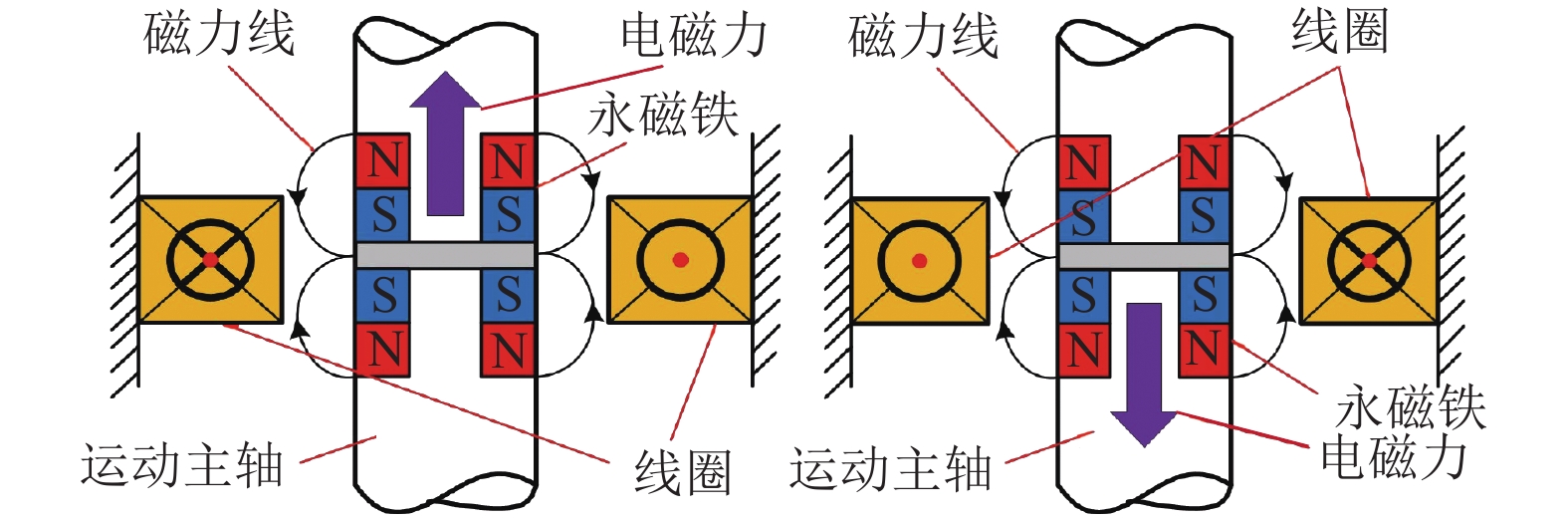
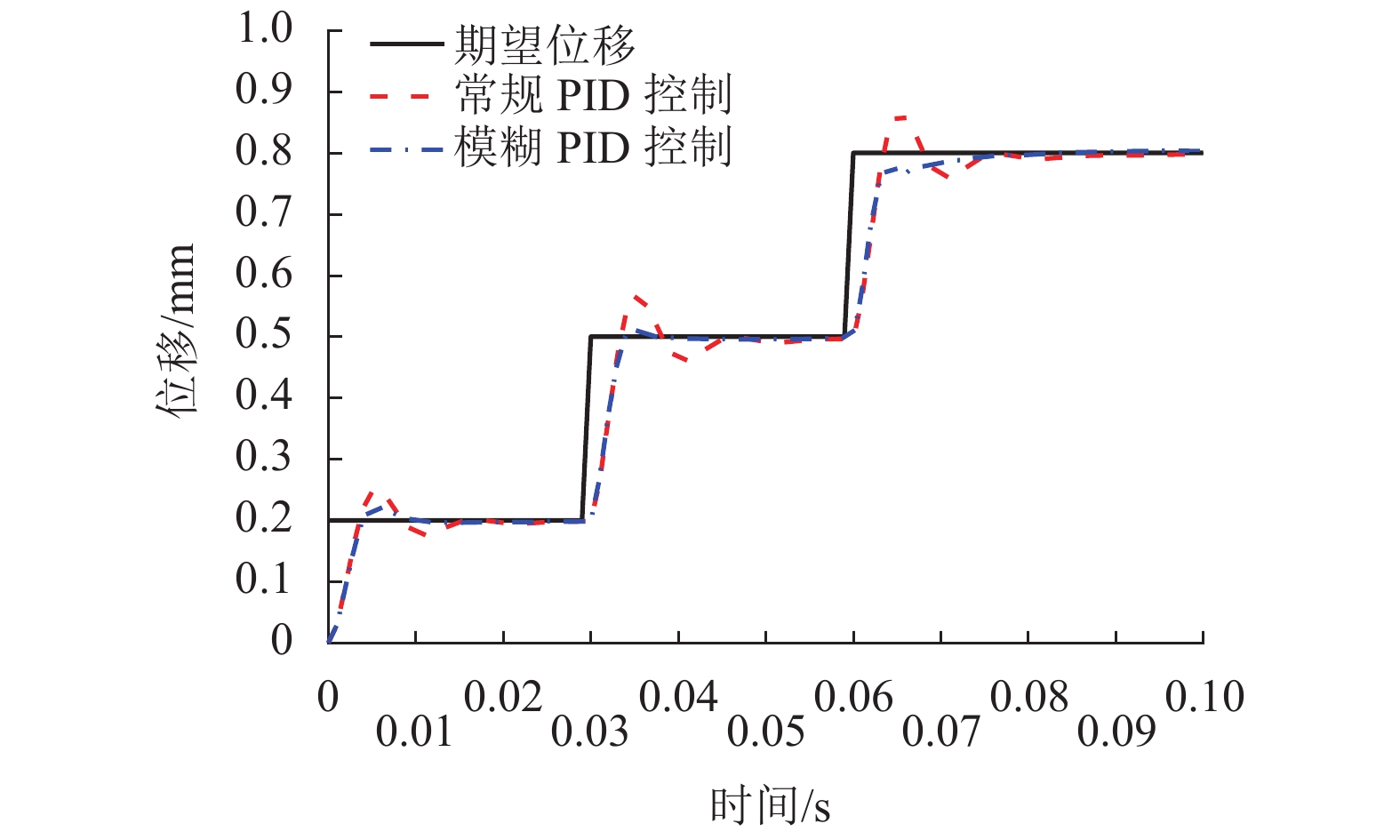
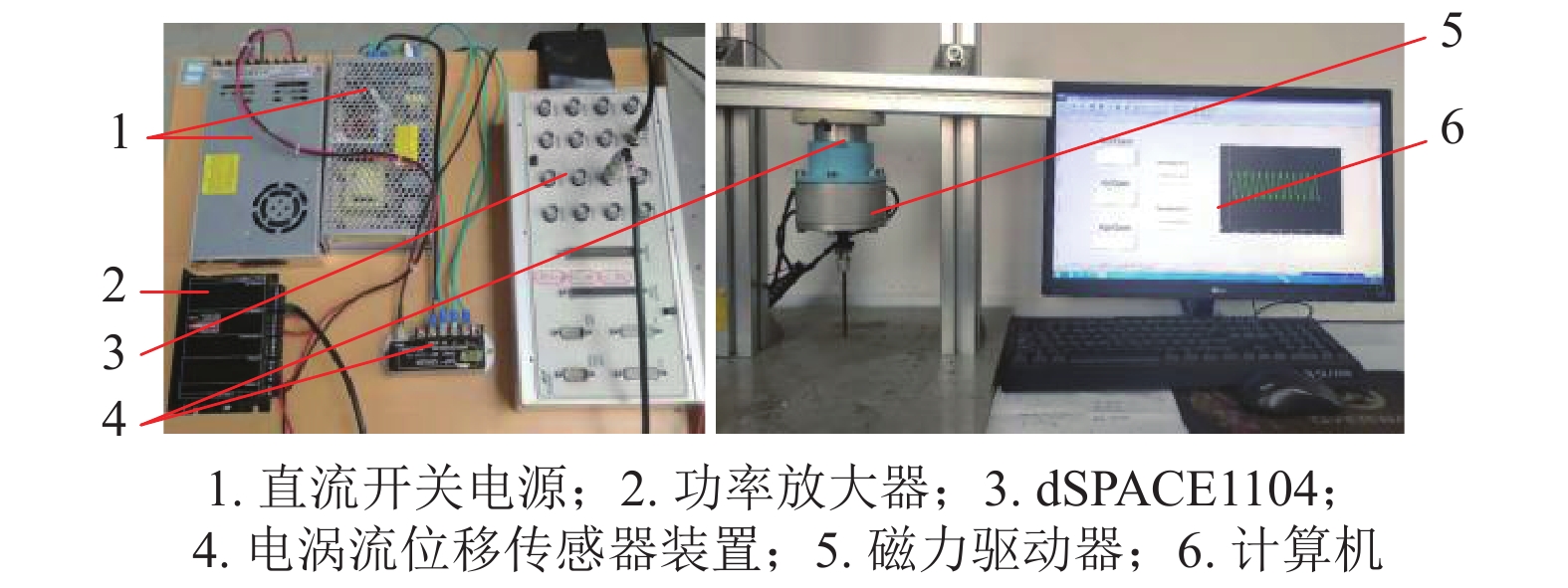
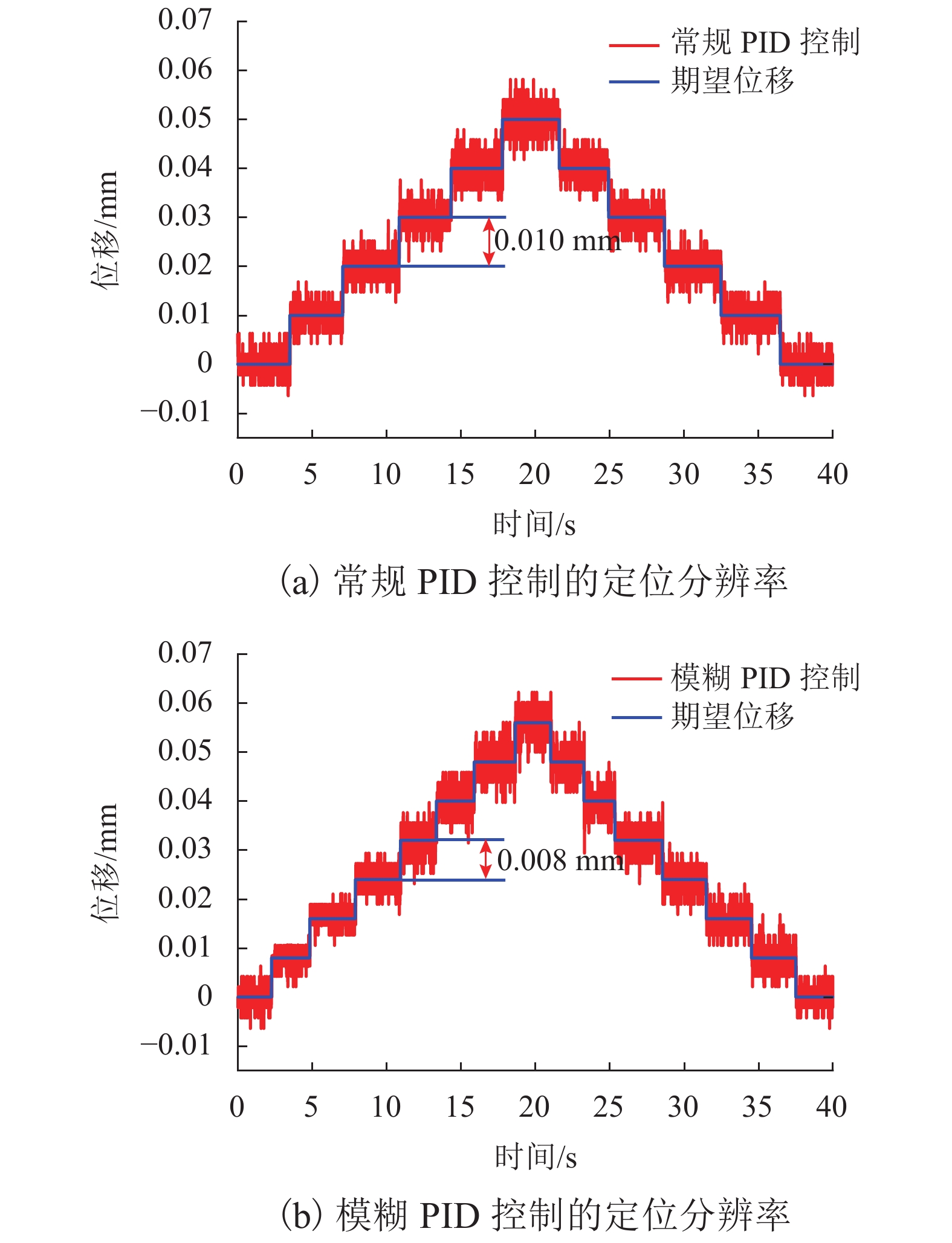
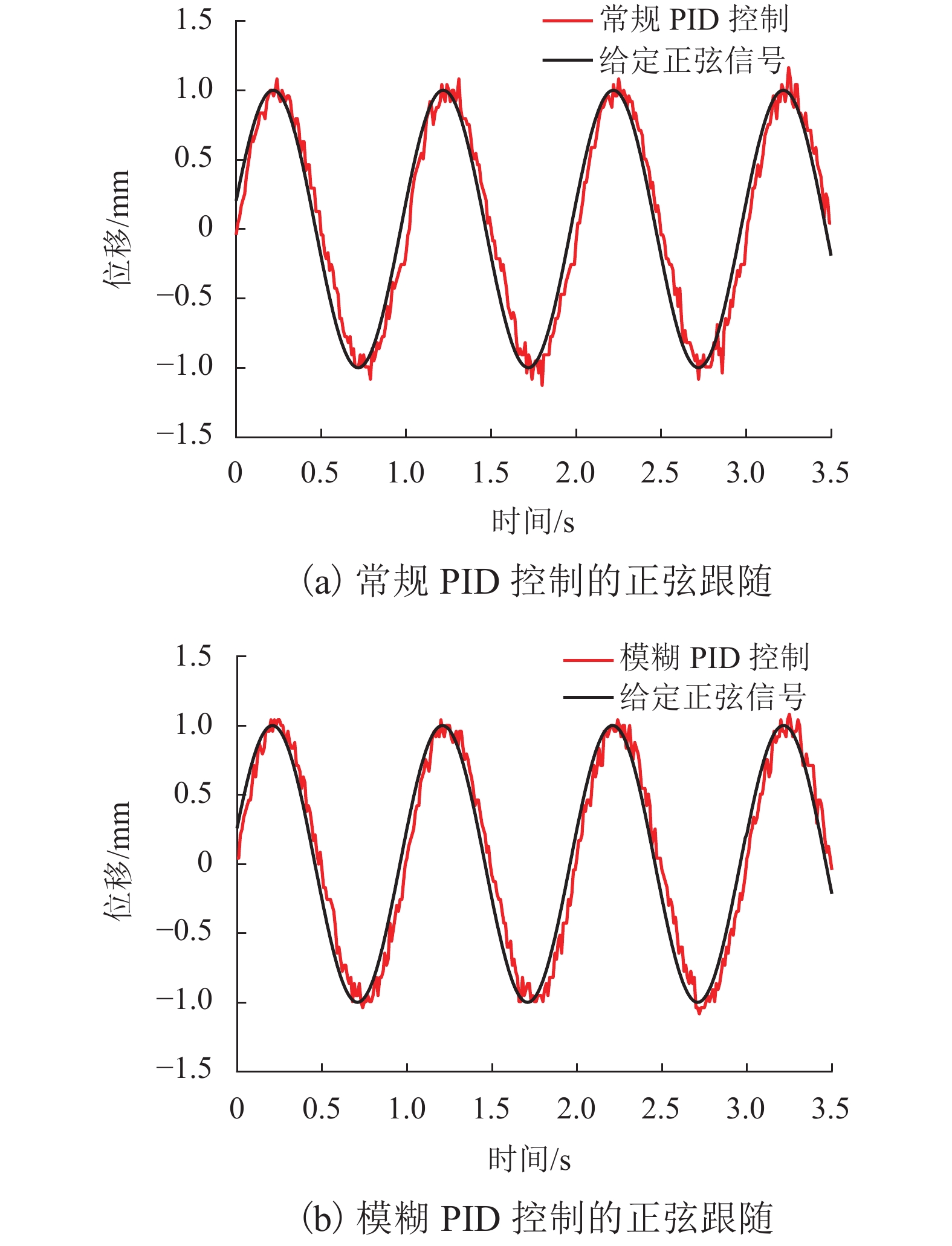
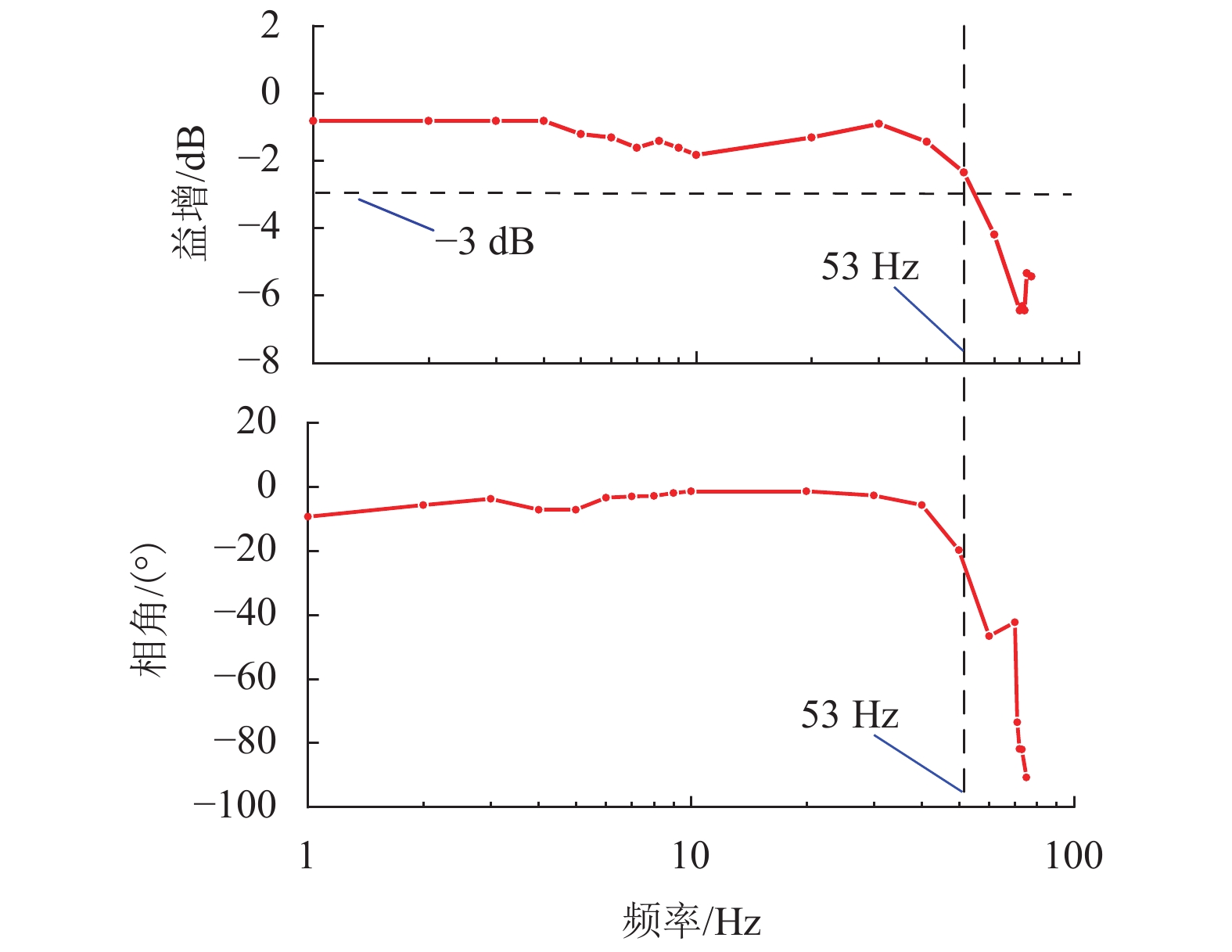
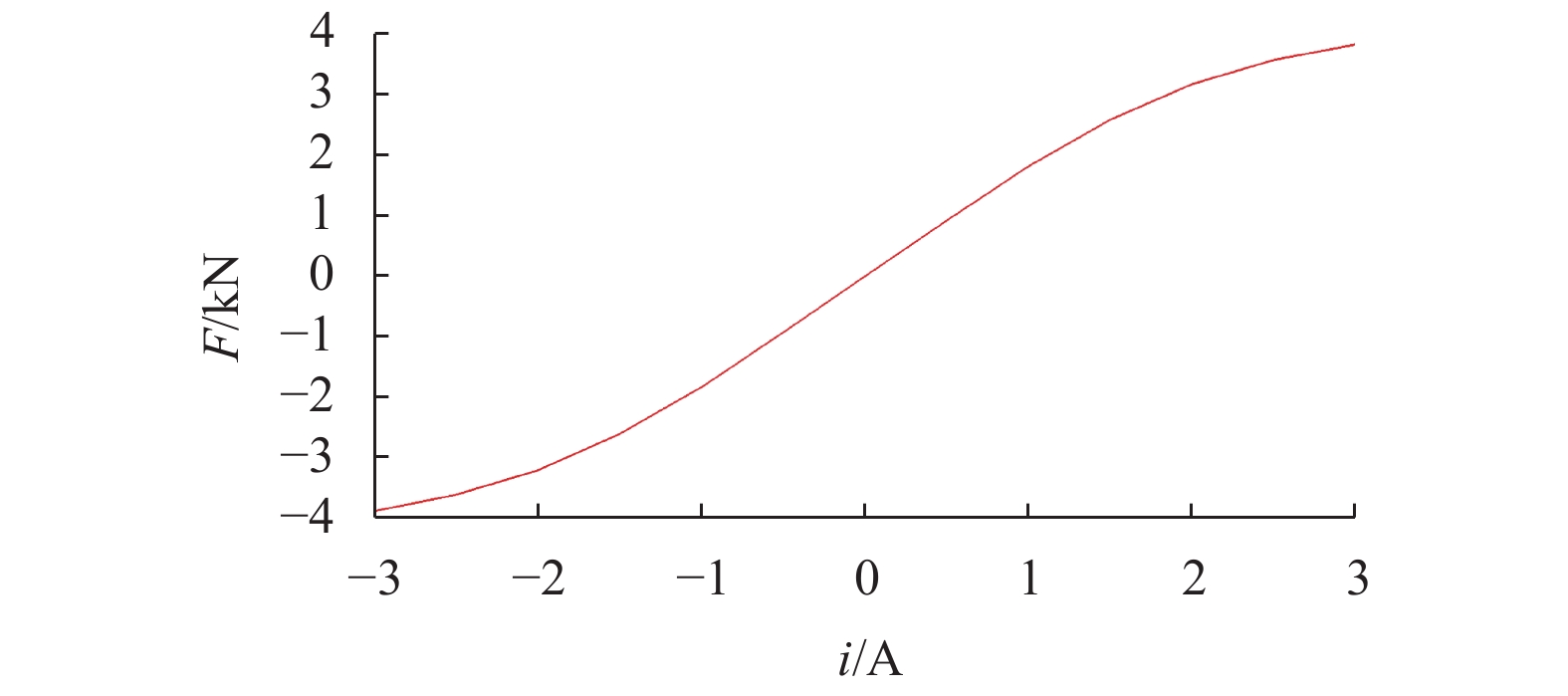
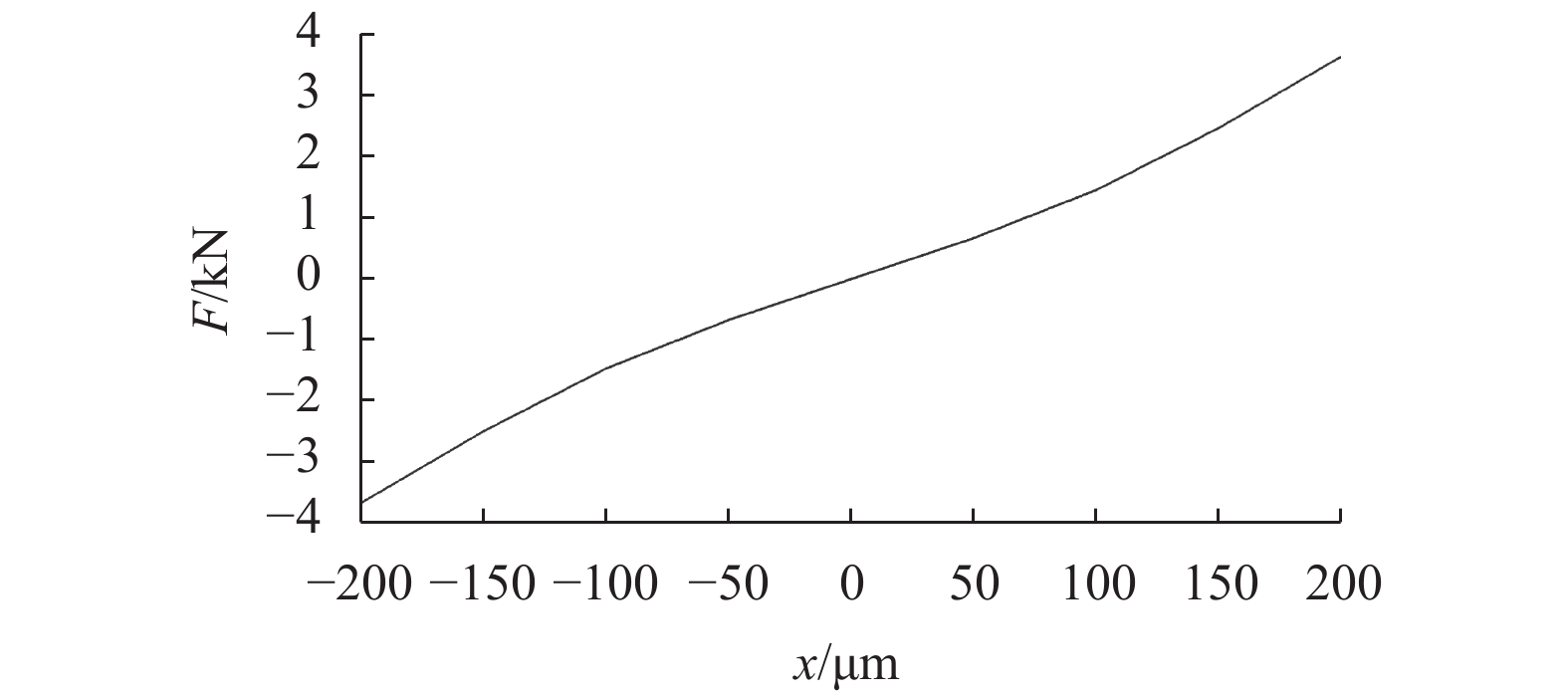
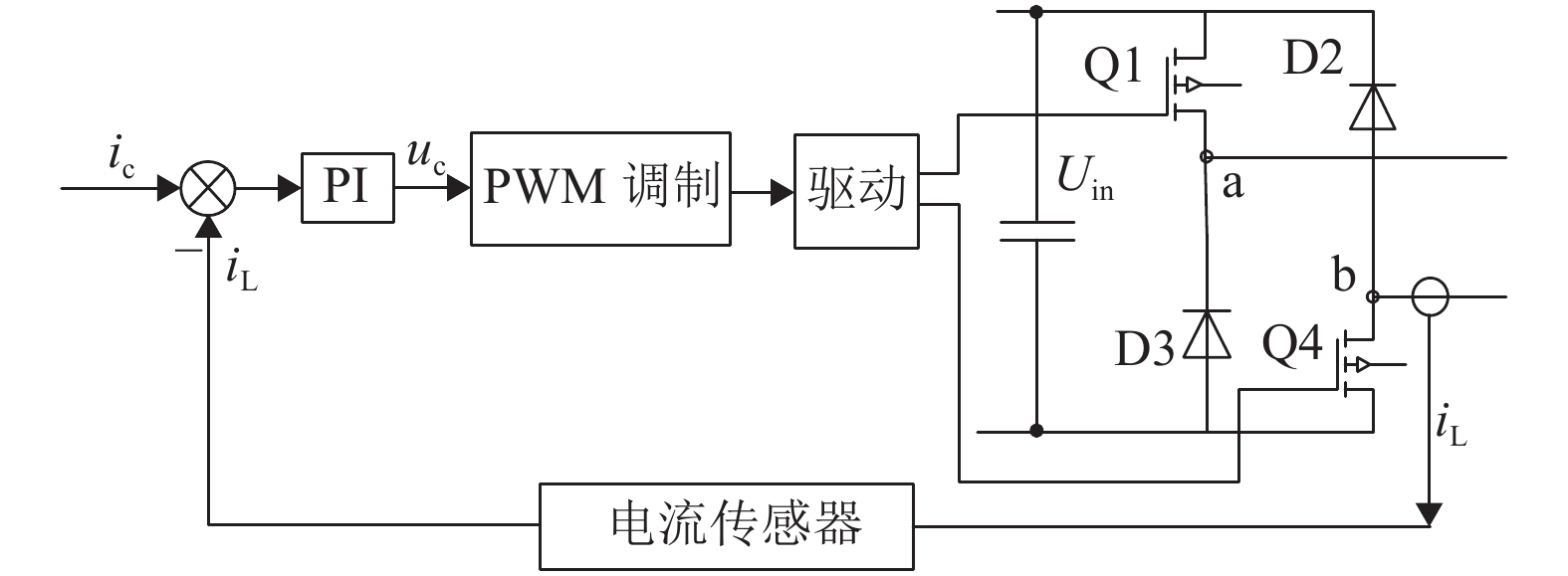
针对传统电火花加工中极间间隙的及时控制问题,提出一种具有高精度、响应快、宽频带、长行程的单自由度磁力驱动器,采用磁力驱动器作为电火花加工的局部执行机构,并设计了一种模糊PID控制方法在线实时修正PID控制参数,优化磁力驱动器控制系统. 首先, 分析了磁力驱动器装置的动力学模型,获得通入线圈电流与磁力驱动器动子位移之间的变换关系;其次, 根据磁力驱动器装置特点设计了常规PID控制器,并引入模糊控制对微定位控制性能进行优化;最后, 通过对磁力驱动器的微定位仿真和实验验证了控制器的控制效果. 仿真和实验结果表明:该磁力驱动器具有微米级的定位分辨率、大于50 Hz的宽频带和2 mm的定位行程,完全满足电火花加工微调要求.


 高级检索
高级检索
 Email alert
Email alert RSS
RSS 摘要
摘要 HTML全文
HTML全文 PDF 7190KB
PDF 7190KB 附件
附件 施引文献
施引文献