

Levitation Control Strategy Based on Adaptive Non-singular Terminal Sliding Mode
-
摘要:
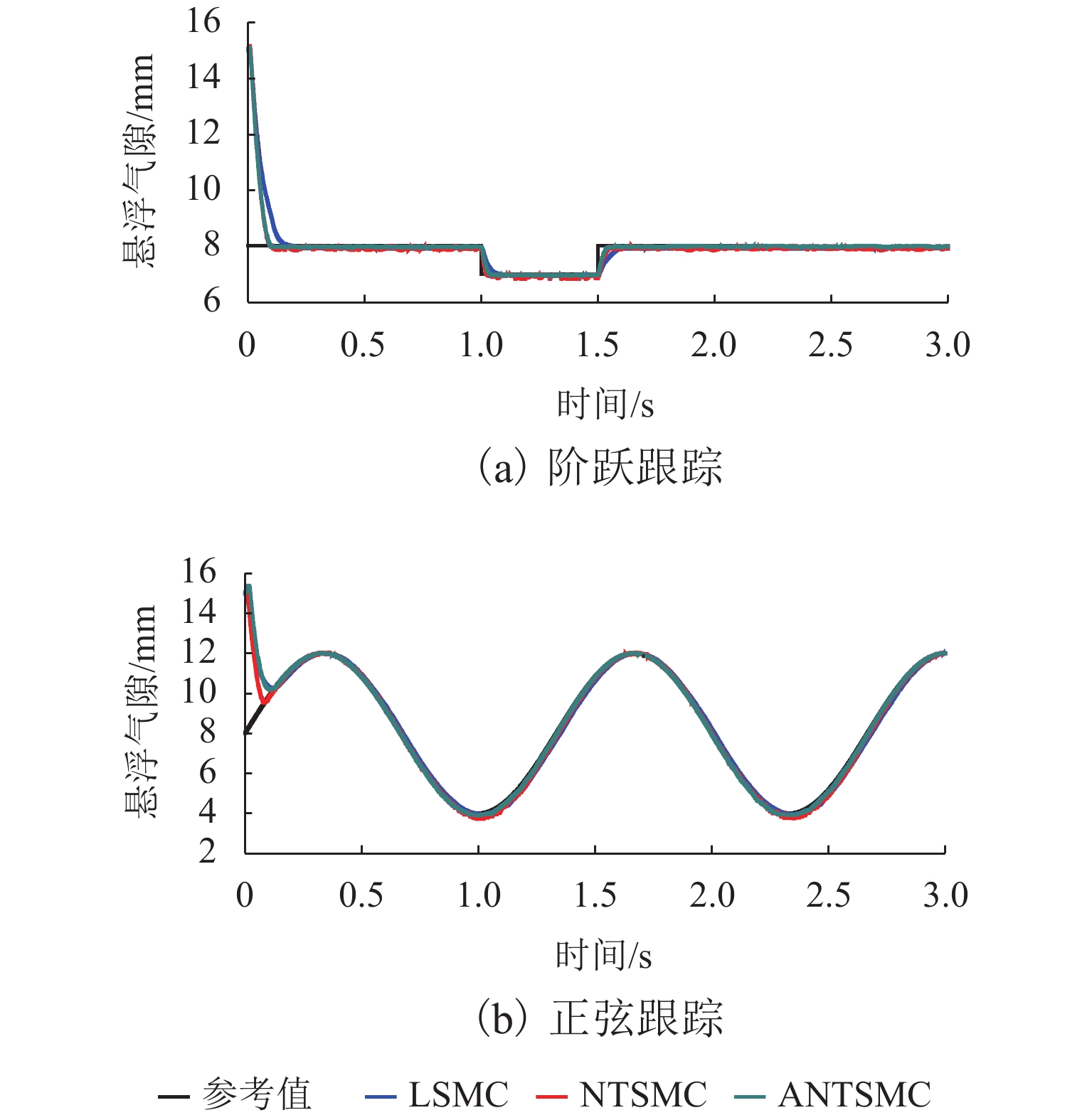
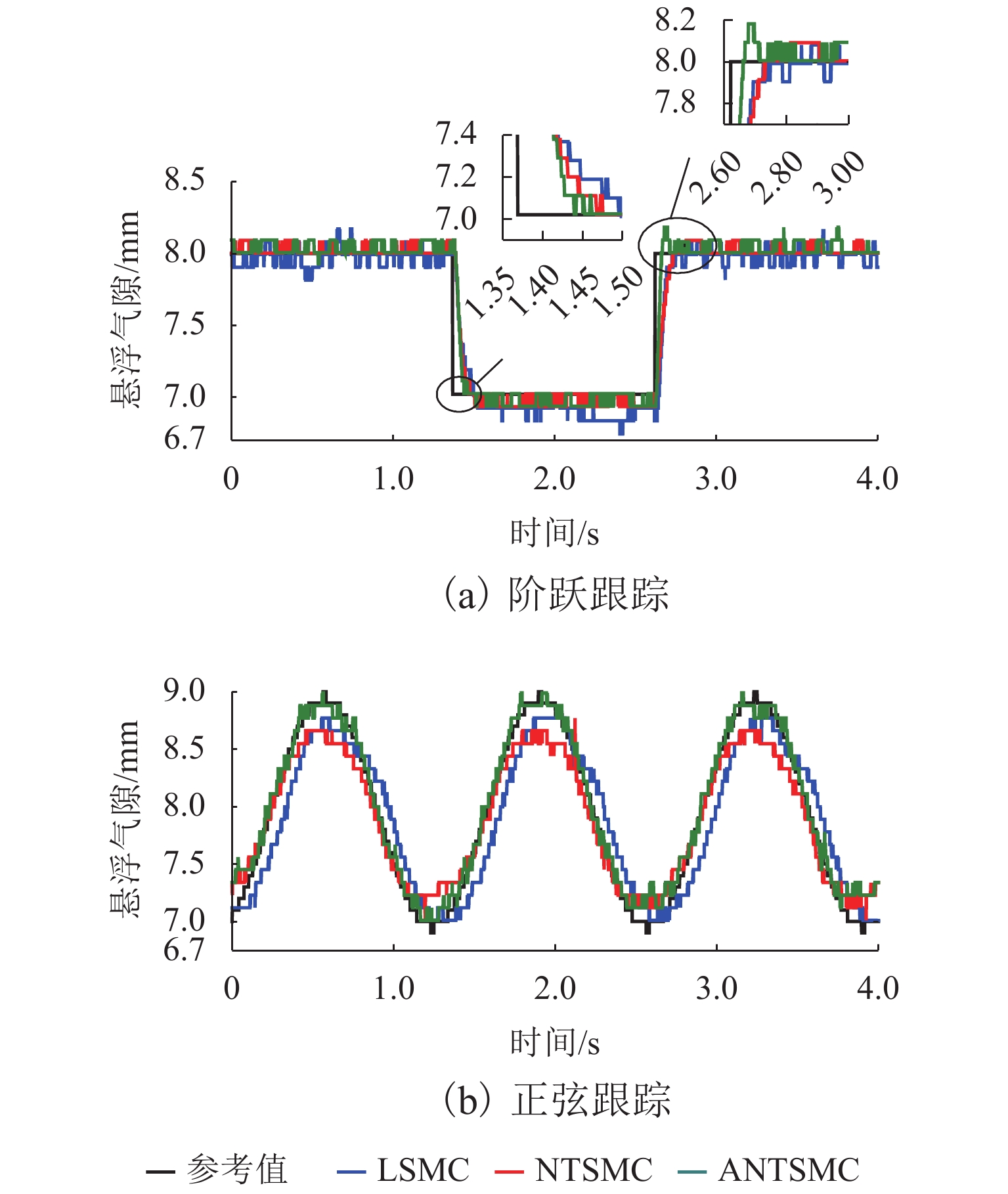
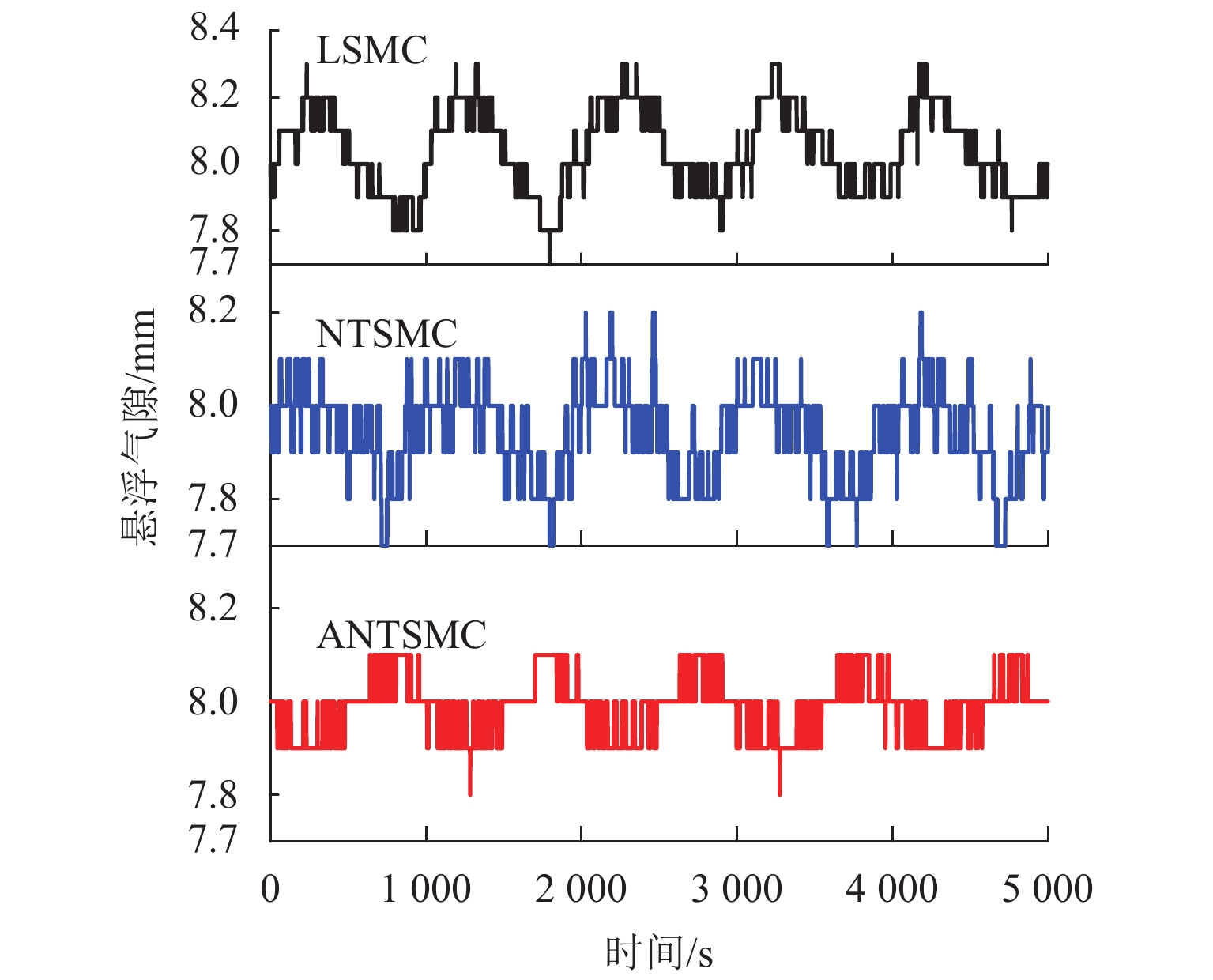
针对采用传统线性滑模控制的电磁悬浮系统存在响应速度慢以及抗干扰能力差的问题,提出了一种基于自适应非奇异终端滑模的悬浮控制方法,该方法将自适应控制引入到终端滑模控制,结合滑模控制对扰动不敏感的优点,利用自适应控制对滑模趋近律系数进行在线自适应调节,改善悬浮系统的动态性能. 首先,建立了电磁悬浮系统数学模型;然后,利用李雅普诺夫稳定理论证明了所设计控制器的稳定性;最后,进行了仿真和实验验证. 实验结果表明:自适应非奇异终端滑模对信号跟踪具有更快的响应速度和更小的稳态误差,对峰峰值为2 N的正弦或锯齿干扰力气隙波动可限定在0.2 mm以内,进行0.1 kg加减载实验时气隙波动为0.6 mm,各项性能均优于终端滑模和线性滑模.
Abstract:Aiming at the problems of slow response speed and poor anti-interference ability of the traditional linear sliding mode control (LSMC) for electromagnetic levitation systems, a levitation control method based on adaptive non-singular terminal sliding mode control (ANTSMC) is proposed. The proposed method introduces an adaptive controller into the terminal sliding mode control (TSMC) to take its advantage of insensitivity to disturbance in sliding mode control. The convergence law coefficients in the sliding mode control are adjusted on line by adaptive control to improve the dynamic performance of the levitation system. First, a mathematical model of the electromagnetic levitation system is established. Then the stability of the designed controller is proved by Lyapunov stability theory. Finally, simulation and experimental verification are carried out. Experimental results show that the system with ANTSMC has a faster response speed and a smaller steady-state error in signal tracking. For sinusoidal or sawtooth interference with peak to peak value of 2 N, air gap fluctuations can be limited to 0.2 mm. The air gap fluctuates 0.6 mm during the 0.1 kg loading and unloading experiments. Generally the proposed levitation controller based on ANTSMC has better performance than those based on TSMC and LSMC.
-
Key words:
- maglev /
- terminal sliding mode /
- adaptive control /
- Lyapunov function
-
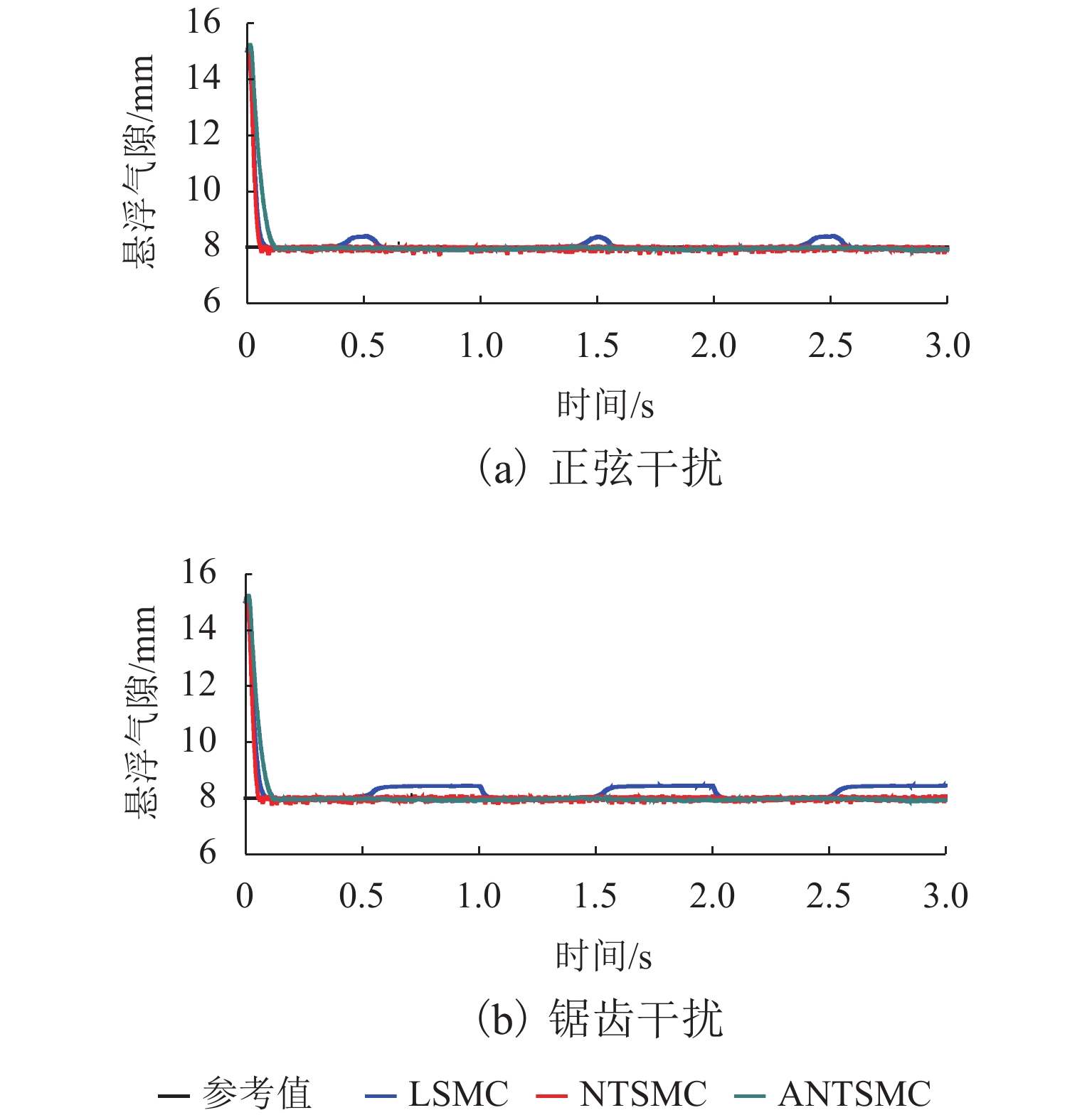
图 3 正弦干扰和锯齿干扰响应曲线
Figure 3. Response curves of sinusoidal disturbance and sawtooth disturbance
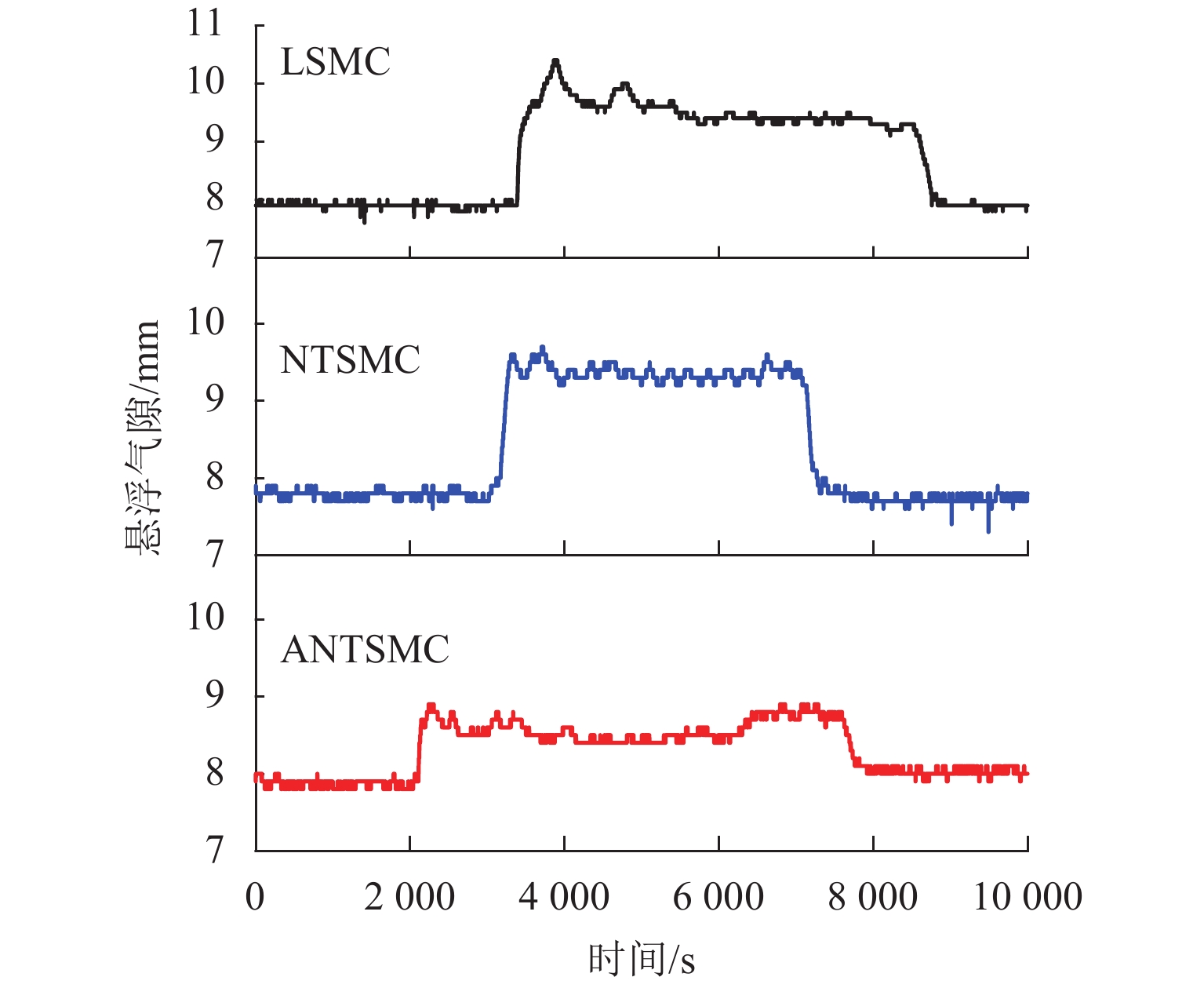
图 9 负载质量为0.1 kg时悬浮气隙响应曲线
Figure 9. Suspension air gap response curves withload mass of 0.1 kg
表 1 电磁悬浮球系统参数
Table 1. Parameters of the electromagnetic levitation ball system
参 数 数 值 参 数 数 值 m/kg 0.318 x0/m 0.008 N/匝 530 i0/A 2.7 A/m2 π × 10−4  下载: 导出CSV
下载: 导出CSV
表 2 悬浮控制器仿真参数
Table 2. Simulation parameters of levitation controllers
控制器 β ξ φ γ ε η LSMC 50 40 NTSMC 20 40 ANTSMC 10 1000 0.5 0.03 1
下载: 导出CSV
表 3 悬浮控制器实验参数
Table 3. Parameters of levitation controllers
控制器 β ξ φ γ ε η LSMC 40 1 NTSMC 20 1 ANTSMC 20 100 0.5 0.03 1
下载: 导出CSV
-
[1] LIN G B, SHENG X W. Application and further development of maglev transportation in China[J]. Transportation Systems and Technology, 2018, 4(3): 36-43. doi: 10.17816/transsyst20184336-43 [2] 靖永志,何飞,廖海军,等. 基于PSO优化RBF-NN的磁浮车间隙传感器温度补偿[J]. 西南交通大学学报,2018,53(2): 367-373,384. doi: 10.3969/j.issn.0258-2724.2018.02.020JING Yongzhi, HE Fei, LIAO Haijun, et al. Temperature compensation of maglev vehicle gap sensor based on RBF-NN optimized by PSO[J]. Journal of Southwest Jiaotong University, 2018, 53(2): 367-373,384. doi: 10.3969/j.issn.0258-2724.2018.02.020 [3] 吕治国,龙志强. 磁悬浮球系统的非线性自适应控制方法[J]. 控制工程,2020,27(1): 127-133.LV Zhiguo, LONG Zhiqiang. Method on nonlinear adaptive controller for maglev levitation ball system[J]. Control Engineering, 2020, 27(1): 127-133. [4] 曹广忠, 潘剑飞, 黄苏丹, 等. 磁悬浮系统控制算法及实现[M]. 北京: 清华大学出版社, 2013. [5] ZHANG X Y, CHEN X K, ZHU G Q, et al. Output feedback adaptive motion control and its experimental verification for time-delay nonlinear systems with asymmetric hysteresis[J]. IEEE Transactions on Industrial Electronics, 2020, 67(8): 6824-6834. doi: 10.1109/TIE.2019.2938460 [6] XU J Q, SUN Y G, GAO D G, et al. Dynamic modeling and adaptive sliding mode control for a maglev train system based on a magnetic flux observer[J]. IEEE Access, 2018, 6: 31571-31579. doi: 10.1109/ACCESS.2018.2836348 [7] YANG Z J, KUNITOSHI K, KANAE S, et al. Adaptive robust output-feedback control of a magnetic levitation system by K-filter approach[J]. IEEE Transactions on Industrial Electronics, 2008, 55(1): 390-399. doi: 10.1109/TIE.2007.896488 [8] CHEN C, XU J Q, JI W, et al. Sliding mode robust adaptive control of maglev vehicle ’s nonlinear suspension system based on flexible track:design and experiment[J]. IEEE Access, 2019, 7: 41874-41884. doi: 10.1109/ACCESS.2019.2906245 [9] WANG J X, ZHAO L, YU L. Adaptive terminal sliding mode control for magnetic levitation systems with enhanced disturbance compensation[J]. IEEE Transactions on Industrial Electronics, 2021, 68(1): 756-766. doi: 10.1109/TIE.2020.2975487 [10] 张振国,陈彦杰,占巍巍,等. 作业型飞行机器人动态滑翔抓取的鲁棒自适应控制[J]. 控制理论与应用,2021,38(6): 775-783. doi: 10.7641/CTA.2020.00326ZHANG Zhenguo, CHEN Yanjie, ZHAN Weiwei, et al. Robust adaptive control for unmanned aerial manipulator in dynamic gliding grasping[J]. Control Theory & Applications, 2021, 38(6): 775-783. doi: 10.7641/CTA.2020.00326 [11] 王云龙,王泽政,王永富,等. 带有干扰观测器的线控转向系统复合自适应神经网络控制[J]. 控制理论与应用,2021,38(4): 433-443. doi: 10.7641/CTA.2020.00340WANG Yunlong, WANG Zezheng, WANG Yongfu, et al. Composite adaptive neural network control for steer-by-wire systems with disturbance observer[J]. Control Theory & Applications, 2021, 38(4): 433-443. doi: 10.7641/CTA.2020.00340 [12] 付东学,赵希梅. 永磁直线同步电机自适应非奇异快速终端滑模控制[J]. 电工技术学报,2020,35(4): 717-723.FU Dongxue, ZHAO Ximei. Adaptive nonsingular fast terminal sliding mode control for permanent magnet linear synchronous motor[J]. Transactions of China Electrotechnical Society, 2020, 35(4): 717-723. [13] LIN C K. Nonsingular terminal sliding mode control of robot manipulators using fuzzy wavelet networks[J]. IEEE Transactions on Fuzzy Systems, 2006, 14(6): 849-859. doi: 10.1109/TFUZZ.2006.879982 [14] 陈闯,王勃,于泳,等. 基于改进指数趋近律的感应电机滑模转速观测器研究[J]. 电工技术学报,2020,35(增刊1): 155-163.CHEN Chuang, WANG Bo, YU Yong, et al. An improved exponential reaching law based-sliding mode observer for speed-sensorless induction motor drives[J]. Transactions of China Electrotechnical Society, 2020, 35(S1): 155-163. [15] JUNEJO A K, XU W, MU C X, et al. Adaptive speed control of PMSM drive system based a new sliding-mode reaching law[J]. IEEE Transactions on Power Electronics, 2020, 35(11): 12110-12121. doi: 10.1109/TPEL.2020.2986893 [16] SUN G H, MA Z Q, YU J Y. Discrete-time fractional order terminal sliding mode tracking control for linear motor[J]. IEEE Transactions on Industrial Electronics, 2018, 65(4): 3386-3394. doi: 10.1109/TIE.2017.2748045 [17] 张立伟,李行,宋佩佩,等. 基于新型滑模观测器的永磁同步电机无传感器矢量控制系统[J]. 电工技术学报,2019,34(增刊1): 70-78.ZHANG Liwei, LI Hang, SONG Peipei, et al. Sensorless vector control using a new sliding mode observer for permanent magnet synchronous motor speed control system[J]. Transactions of China Electrotechnical Society, 2019, 34(S1): 70-78. [18] 朱坚民,沈正强,李孝茹,等. 基于神经网络反馈补偿控制的磁悬浮球位置控制[J]. 仪器仪表学报,2014,35(5): 976-986.ZHU Jianmin, SHEN Zhengqiang, LI Xiaoru, et al. Magnetic levitation ball position control based on neural network feedback compensation control[J]. Chinese Journal of Scientific Instrument, 2014, 35(5): 976-986. [19] BAEK S, BAEK J, HAN S. An adaptive sliding mode control with effective switching gain tuning near the sliding surface[J]. IEEE Access, 2019, 7: 15563-15572. doi: 10.1109/ACCESS.2019.2894911 -

 下载:
下载:



 点击查看大图
点击查看大图

计量
- 文章访问数: 714
- HTML全文浏览量: 279
- PDF下载量: 36
- 被引次数: 0