

Decoupling and Control Stability Analysis Based on Hybrid Repulsion Maglev Platform
-
摘要:
为了研究磁悬浮平台系统中存在的多自由度耦合问题,提出一种利用永磁体之间的被动受力来减少竖直方向上主动控制的设计思路,给出一种混合斥力式磁浮平台的结构设计,该磁悬浮结构的定子由永磁体和电磁线圈共同组成,由永磁体提供主要的悬浮力,电磁线圈提供水平方向的驱动力,以此减少负责主动悬浮的线圈数量,减小线圈功耗及产热. 基于磁荷模型推导出磁标量势满足的拉普拉斯方程,利用分离变量法求出磁标量势的解析表达式,并对浮子在整个磁场中的受力进行精确的计算;充分研究探讨了定子与动子永磁体之间被动悬浮力的稳定区域,简化忽略了竖直方向上力的解耦,建立被控对象的数学模型,并研制了以微控制单元为中心的数字集成控制器,通过试验研究了平台的悬浮性能. 研究结果表明:本文所提出的混合斥力式磁浮平台在悬浮高度23 mm水平范围 ± 4 mm内,能够实现稳定的水平运动,并且浮子在垂直方向的位移变化不超过0.2 mm.
Abstract:In order to study the multi-degree-of-freedom coupling problem in the magnetic levitation platform system, a design idea of using passive force between permanent magnets to reduce the active control in the vertical direction is proposed, and the structure design of a repulsion maglev platform is given. The stator of the magnetic suspension structure studied is composed of permanent magnet and electromagnetic coils. Its characteristic is that the permanent magnet provides the main suspension force, and the electromagnetic coils provide the horizontal driving force, so as to reduce the number of coils responsible for active suspension, and reduce coil power consumption and heat generation. Firstly, the Laplace equation satisfied by the scalar potential was derived based on the magnetic charge model, the analytical expression of the scalar potential was obtained by using the separation variable method. And the force of the float in the whole magnetic field was accurately calculated. Next, the stable region of passive suspension force between stator and mover permanent magnet was fully studied and discussed, the decoupling of the force in the vertical direction was simplified and ignored, and the mathematical model of the controlled object was established. The digital integrated controller centered on the micro-control unit was developed. The levitation performance of the platform was studied by experiments. The research results show that the hybrid repulsion maglev platform proposed in this paper can realize the stable motion control of the above float within the horizontal range of ± 4 mm of the suspension height of 23 mm, and can realize the stable horizontal motion, and the displacement change of the float in the vertical direction does not exceed 0.2 mm.
-
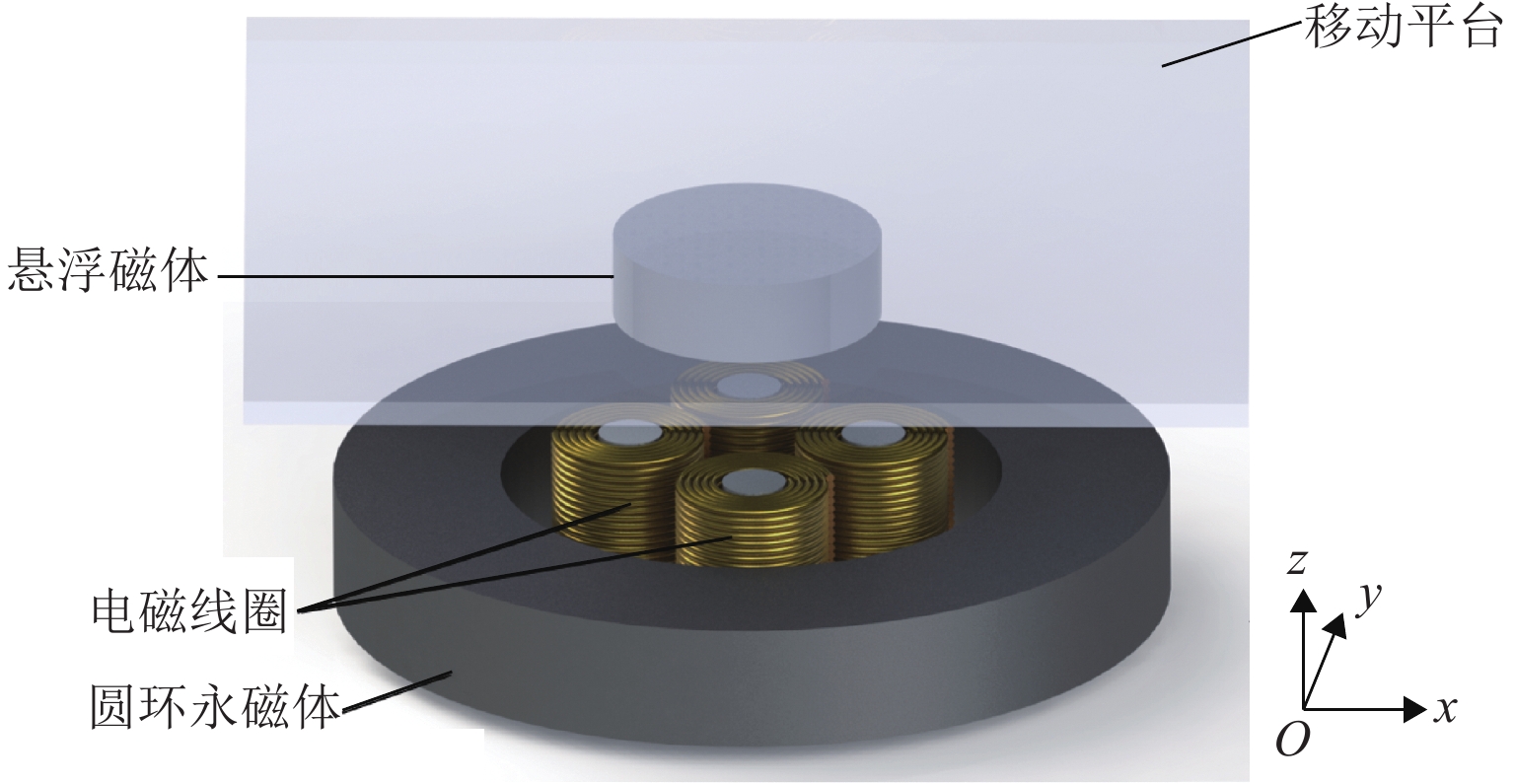
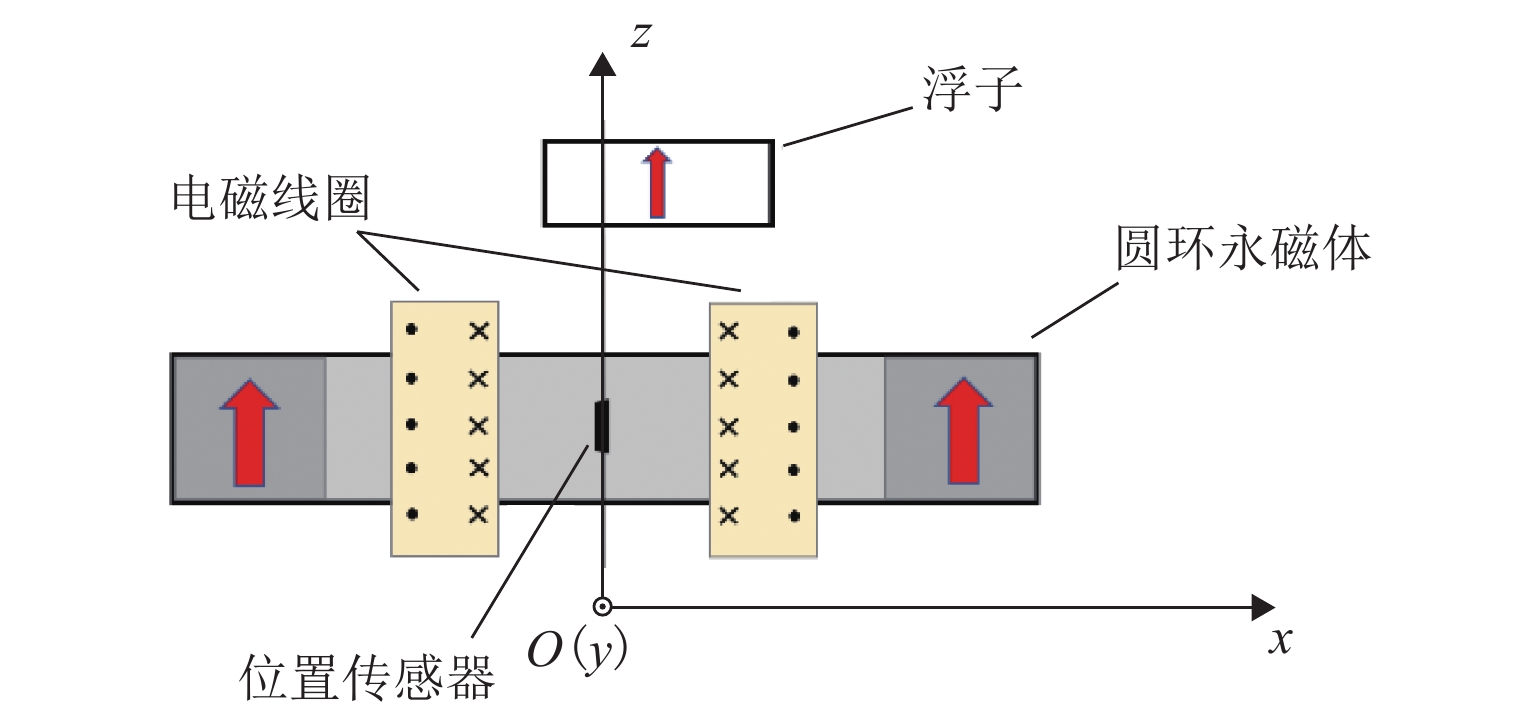
图 1 混合斥力式磁浮平台简易结构图
Figure 1. Simple structure diagram of hybrid repulsion maglev platform

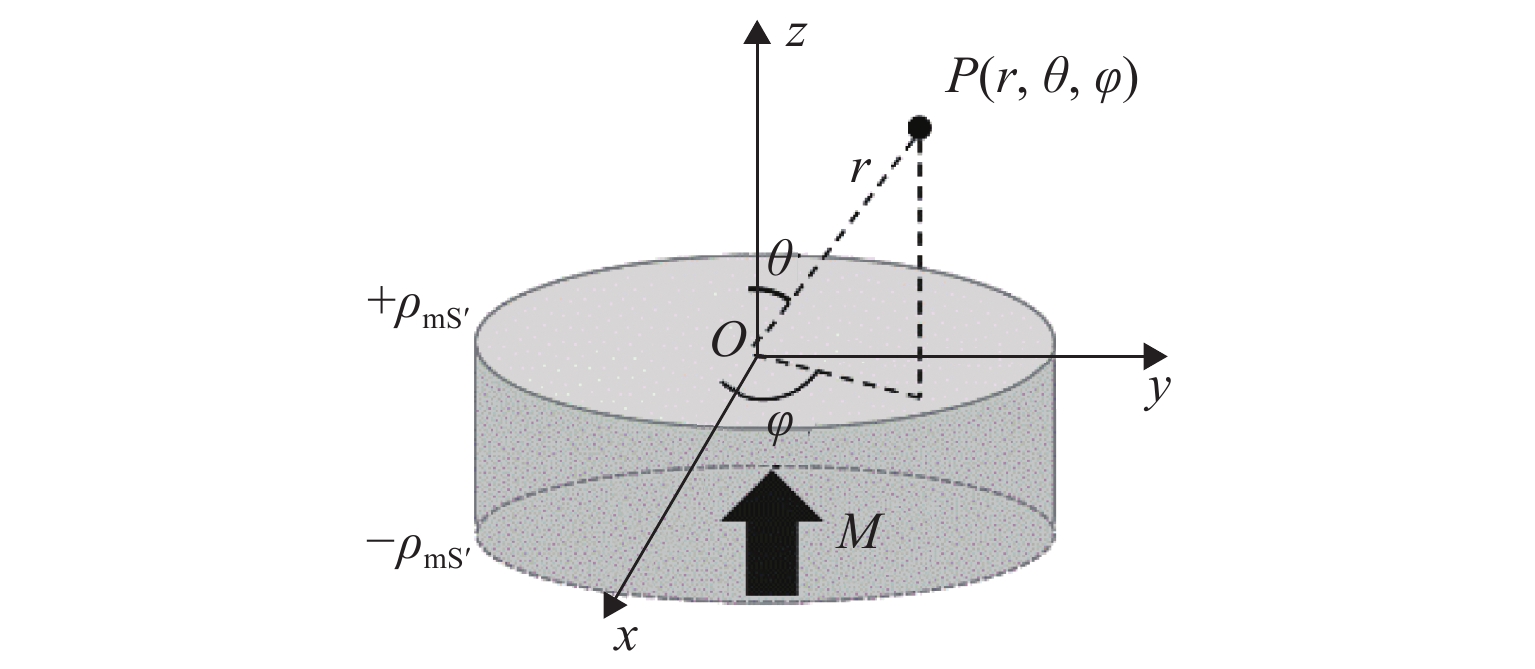
图 3 圆环与圆柱永磁体之间的等价关系
Figure 3. Equivalence relation between ring and cylindrical permanent magnet
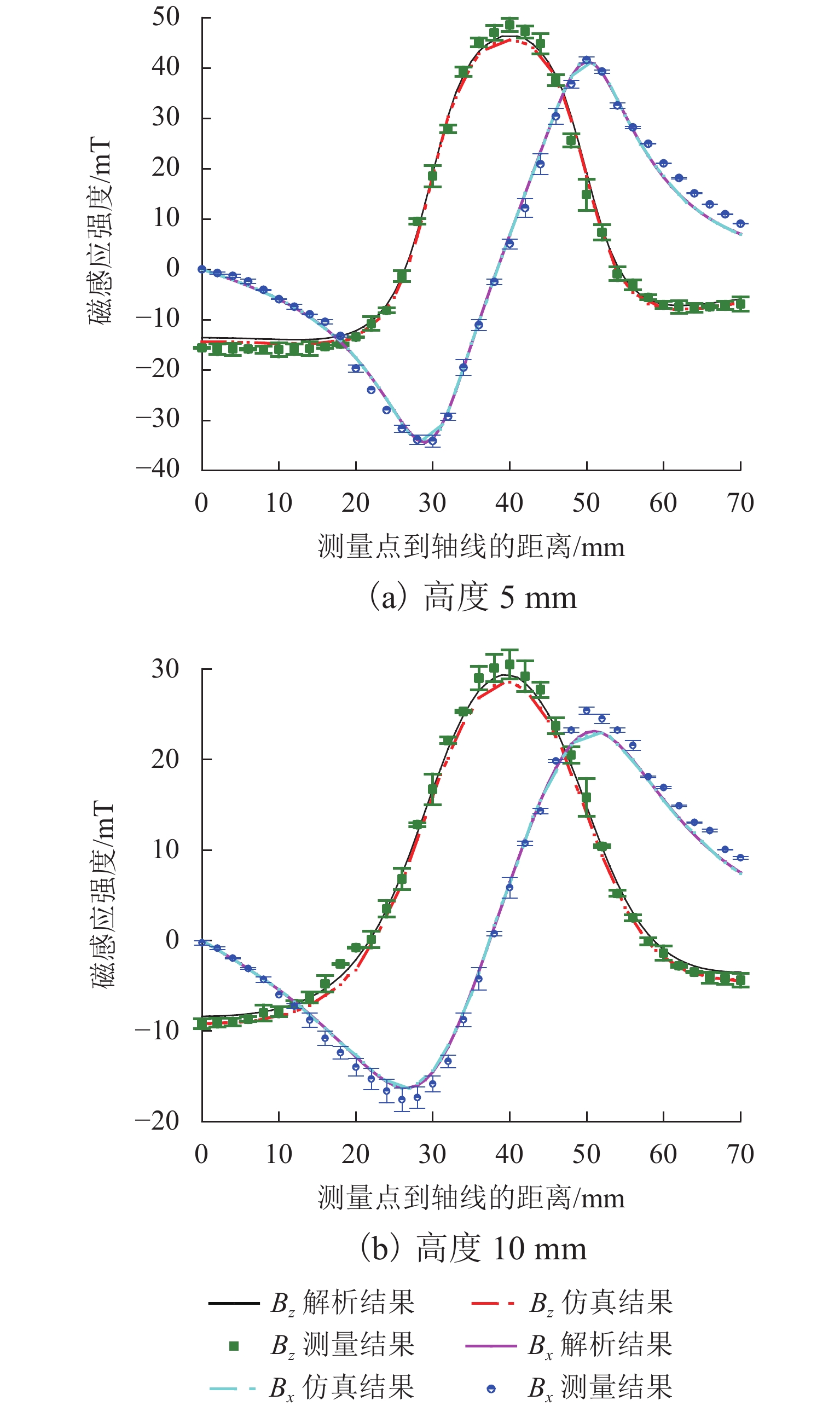
图 5 不同高度处圆环永磁体的磁感应强度分布
Figure 5. Magnetic flux density distribution of ring permanent magnets at different heights
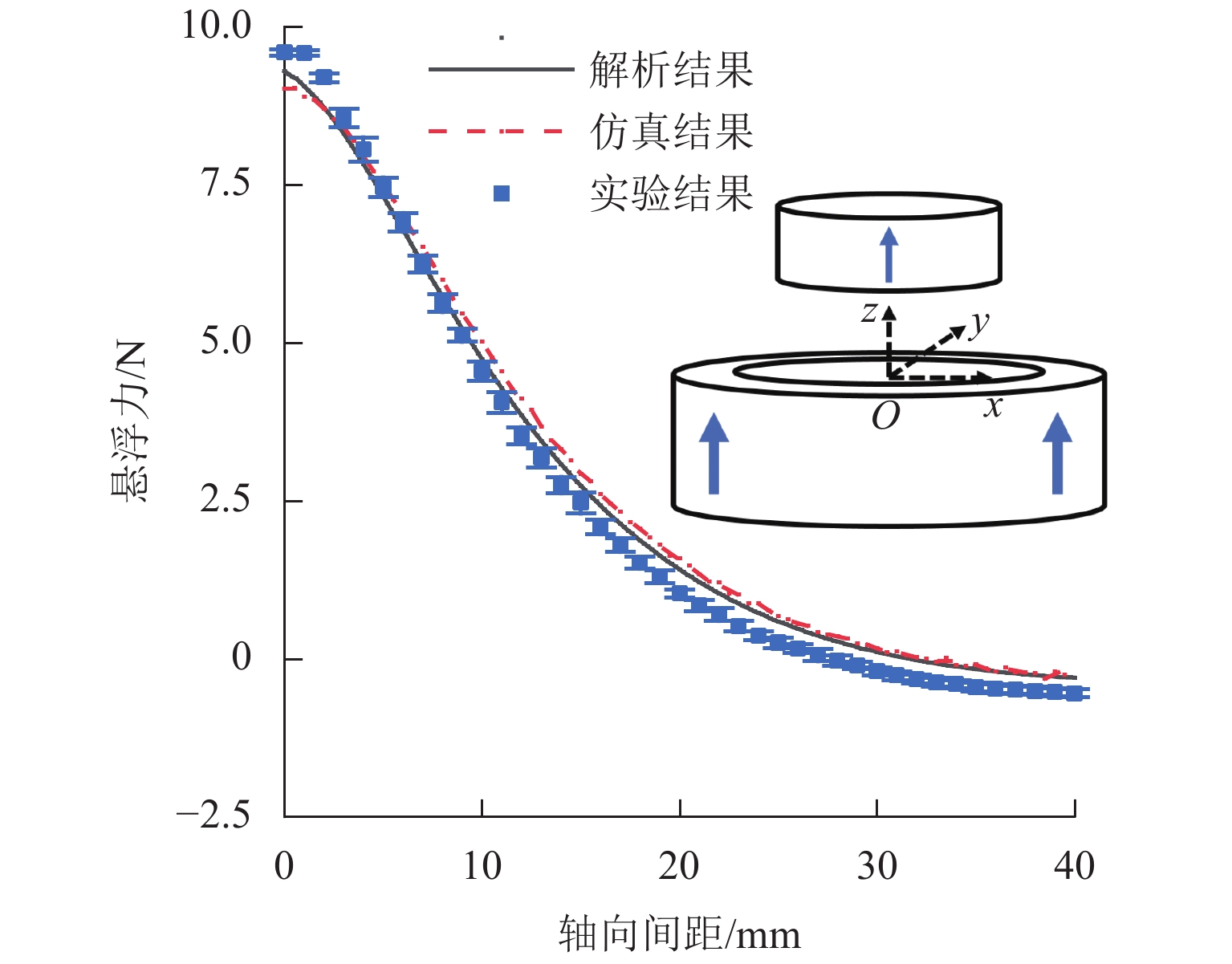
图 6 悬浮力随磁体之间轴向距离的变化
Figure 6. Variation of levitation force with axial distance between magnets
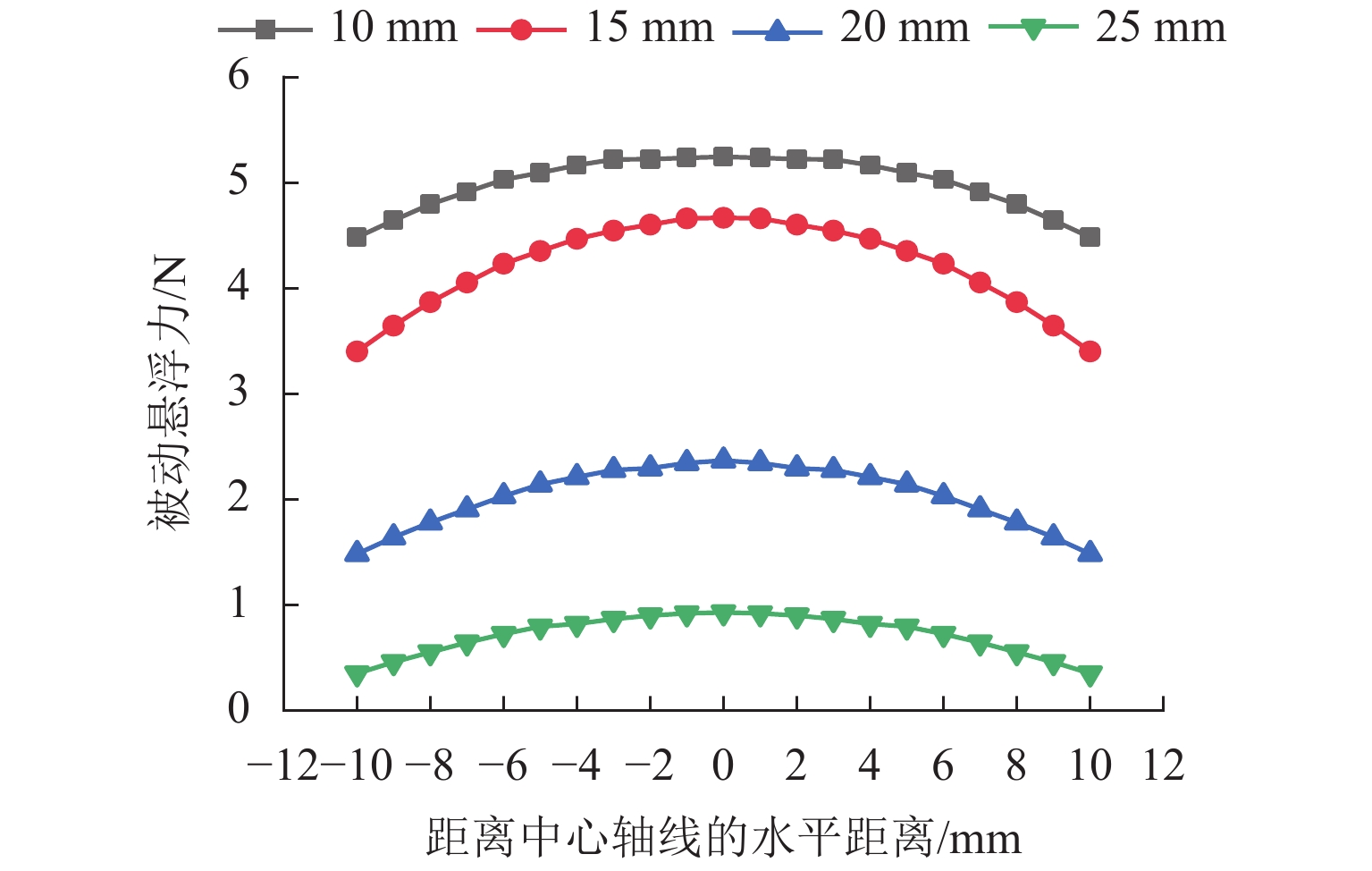
图 7 被动悬浮力在不同高度处随水平位移的变化
Figure 7. Variation of passive suspension force with horizontal displacement at different heights
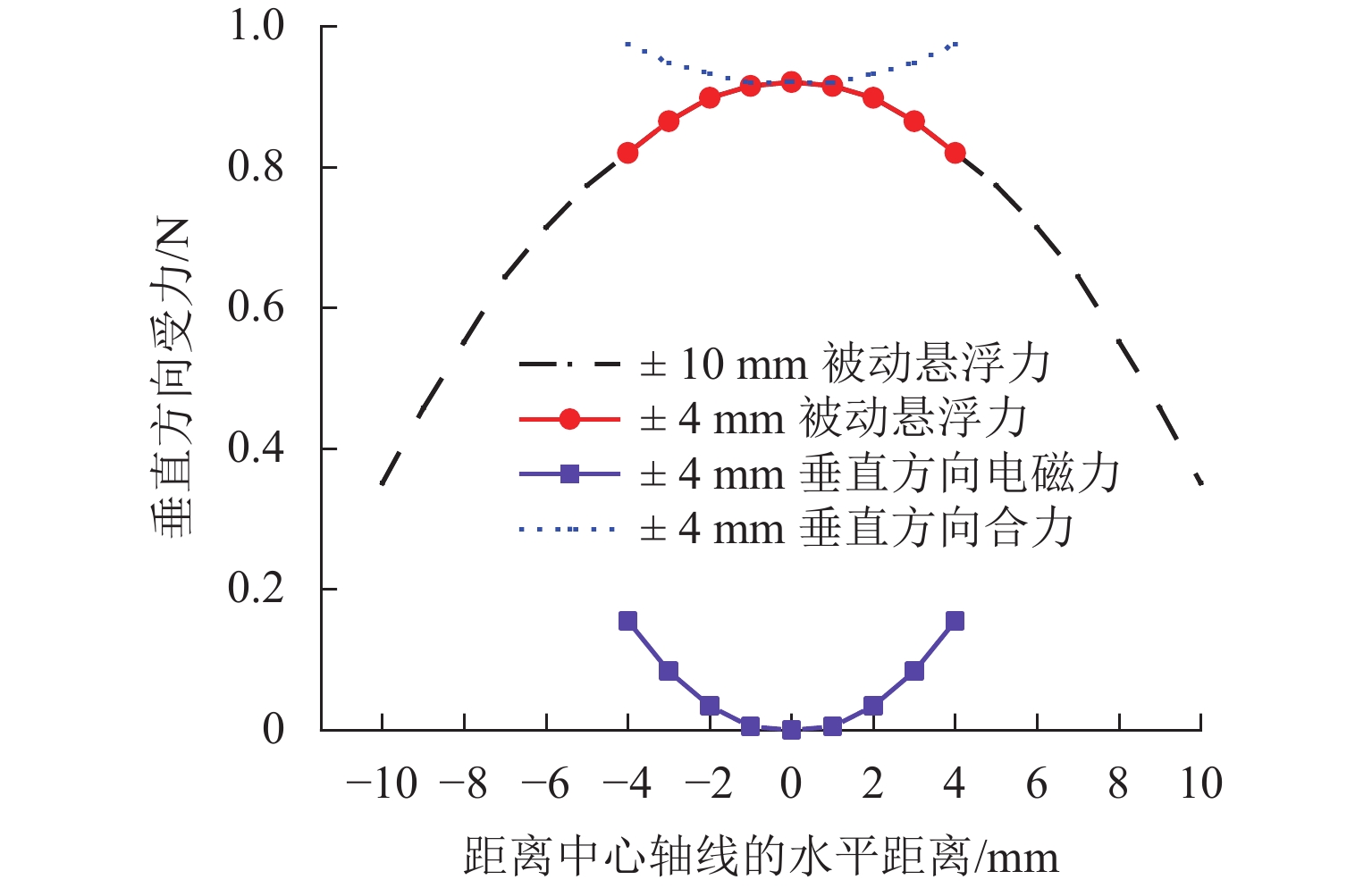
图 9 浮子垂直方向受力与水平位移的关系
Figure 9. Relationship between vertical force and horizontal displacement of float
-
[1] 翟婉明,赵春发. 现代轨道交通工程科技前沿与挑战[J]. 西南交通大学学报,2016,51(2): 209-226. doi: 10.3969/j.issn.0258-2724.2016.02.001ZHAI Wanming, ZHAO Chunfa. Frontiers and challenges of sciences and technologies in modern railway engineering[J]. Journal of Southwest Jiaotong University, 2016, 51(2): 209-226. doi: 10.3969/j.issn.0258-2724.2016.02.001 [2] 徐飞,罗世辉,邓自刚. 磁悬浮轨道交通关键技术及全速度域应用研究[J]. 铁道学报,2019,41(3): 40-49. doi: 10.3969/j.issn.1001-8360.2019.03.006XU Fei, LUO Shihui, DENG Zigang. Study on key technologies and whole speed range application of maglev rail transport[J]. Journal of the China Railway Society, 2019, 41(3): 40-49. doi: 10.3969/j.issn.1001-8360.2019.03.006 [3] 邓自刚,张勇,王博,等. 真空管道运输系统发展现状及展望[J]. 西南交通大学学报,2019,54(5): 1063-1072. doi: 10.3969/j.issn.0258-2724.20180204DENG Zigang, ZHANG Yong, WANG Bo, et al. Present situation and prospect of evacuated tube transportation system[J]. Journal of Southwest Jiaotong University, 2019, 54(5): 1063-1072. doi: 10.3969/j.issn.0258-2724.20180204 [4] 潘毅,周盟,郭瑞,等. 基于磁悬浮技术的建筑隔震研究进展[J]. 西南交通大学学报,2019,54(3): 475-482. doi: 10.3969/j.issn.0258-2724.20170413PAN Yi, ZHOU Meng, GUO Rui, et al. Research progress on building isolation based on electromagnetic levitation techniques[J]. Journal of Southwest Jiaotong University, 2019, 54(3): 475-482. doi: 10.3969/j.issn.0258-2724.20170413 [5] 熊嘉阳,邓自刚. 高速磁悬浮轨道交通研究进展[J]. 交通运输工程学报,2021,21(1): 177-198.XIONG Jiayang, DENG Zigang. Research progress of high-speed maglev rail transit[J]. Journal of Traffic and Transportation Engineering, 2021, 21(1): 177-198. [6] 秦新燕,雷金. 磁悬浮定位平台的研究综述[J]. 机床与液压,2012,40(21): 160-166. doi: 10.3969/j.issn.1001-3881.2012.21.043QIN Xinyan, LEI Jin. Research review on magnetic levitation positioning stage[J]. Machine Tool & Hydraulics, 2012, 40(21): 160-166. doi: 10.3969/j.issn.1001-3881.2012.21.043 [7] KIM W J, TRUMPER D L. High-precision magnetic levitation stage for photolithography[J]. Precision Engineering, 1998, 22(2): 66-77. doi: 10.1016/S0141-6359(98)00009-9 [8] CHEN M Y, LIN T B, HUNG S K, et al. Design and experiment of a macro—micro planar maglev positioning system[J]. IEEE Transactions on Industrial Electronics, 2012, 59(11): 4128-4139. doi: 10.1109/TIE.2011.2174531 [9] LAHDO M, STROHLA T, KOVALEV S. Magnetically levitated planar positioning systems based on Lorentz forces[C]//2017 11th International Symposium on Linear Drives for Industry Applications (LDIA). Osaka: IEEE, 2017: 1-6. [10] LAHDO M, STRÖHLA T, KOVALEV S. Design and implementation of an new 6-DoF magnetic levitation positioning system[J]. IEEE Transactions on Magnetics, 2019, 55(12): 1-7. [11] ZHANG H, KOU B Q, ZHOU Y H. Analysis and design of a novel magnetic levitation gravity compensator with low passive force variation in a large vertical displacement[J]. IEEE Transactions on Industrial Electronics, 2020, 67(6): 4797-4805. doi: 10.1109/TIE.2019.2924858 [12] SHAKIR H, KIM W J. Nanoscale path planning and motion control with maglev positioners[J]. IEEE/ASME Transactions on Mechatronics, 2006, 11(5): 625-633. doi: 10.1109/TMECH.2006.882995 [13] 蒋启龙,梁达,阎枫. 数字单周期电流控制在电磁悬浮系统中的应用[J]. 西南交通大学学报,2019,54(1): 1-8,22.JIANG Qilong, LIANG Da, YAN Feng. Application of digital one-cycle control for current in electromagnetic suspension system[J]. Journal of Southwest Jiaotong University, 2019, 54(1): 1-8,22. [14] 周振雄,杨建东,曲永印,等. 基于自抗扰控制器的磁浮平台水平推力控制[J]. 机械工程学报,2008,44(9): 193-199,204. doi: 10.3321/j.issn:0577-6686.2008.09.032ZHOU Zhenxiong, YANG Jiandong, QU Yongyin, et al. Horizontal thrust control of magnetic suspension platform based on active disturbance rejection controller[J]. Chinese Journal of Mechanical Engineering, 2008, 44(9): 193-199,204. doi: 10.3321/j.issn:0577-6686.2008.09.032 [15] 李黎川,丁玉成,卢秉恒. 超精密磁悬浮工作台及其解耦控制[J]. 机械工程学报,2004,40(9): 84-88,94. doi: 10.3321/j.issn:0577-6686.2004.09.018LI Lichuan, DING Yucheng, LU Bingheng. High-precision magnetically suspended table and its decoupling control[J]. Chinese Journal of Mechanical Engineering, 2004, 40(9): 84-88,94. doi: 10.3321/j.issn:0577-6686.2004.09.018 [16] 张生果,朱煜,尹文生,等. 动圈式磁悬浮工件台线圈阵列实时电流分配法则[J]. 机械工程学报,2011,47(6): 180-185. doi: 10.3901/JME.2011.06.180ZHANG Shengguo, ZHU Yu, YIN Wensheng, et al. Coil array real-time commutation law for magnetically levitated stage with moving-coils[J]. Journal of Mechanical Engineering, 2011, 47(6): 180-185. doi: 10.3901/JME.2011.06.180 [17] 孙立军,张涛,赵兵. 永磁磁轴承数学模型的研究[J]. 机械工程学报,2005,41(4): 69-74. doi: 10.3321/j.issn:0577-6686.2005.04.014SUN Lijun, ZHANG Tao, ZHAO Bing. Study of mathematical model of permanent magnet bearings[J]. Chinese Journal of Mechanical Engineering, 2005, 41(4): 69-74. doi: 10.3321/j.issn:0577-6686.2005.04.014 [18] RAVAUD R, LEMARQUAND G, LEMARQUAND V, et al. Analytical calculation of the magnetic field created by permanent-magnet rings[J]. IEEE Transactions on Magnetics, 2008, 44(8): 1982-1989. doi: 10.1109/TMAG.2008.923096 [19] 苟晓凡,杨勇,郑晓静. 矩形永磁体磁场分布的解析表达式[J]. 应用数学和力学,2004,25(3): 271-278. doi: 10.3321/j.issn:1000-0887.2004.03.008GOU Xiaofan, YANG Yong, ZHENG Xiaojing. Analytic expression of magnetic field distribution of rectangular permanent magnets[J]. Applied Mathematics and Mechanics, 2004, 25(3): 271-278. doi: 10.3321/j.issn:1000-0887.2004.03.008 [20] TANG W B, XIAO L Y, XIA D, et al. 2-D and 3-D analytical calculation of the magnetic field and levitation force between two halbach permanent magnet arrays[J]. IEEE Transactions on Magnetics, 2021, 57(4): 1-8. [21] 王瑞凯,左洪福,吕萌. 环形磁铁空间磁场的解析计算与仿真[J]. 航空计算技术,2011,41(5): 19-23. doi: 10.3969/j.issn.1671-654X.2011.05.005WANG Ruikai, ZUO Hongfu, LYU Meng. Analytical calculation and simulation for magnetic field distribution of ring magnet[J]. Aeronautical Computing Technique, 2011, 41(5): 19-23. doi: 10.3969/j.issn.1671-654X.2011.05.005 [22] 吴崇试. 均匀带电圆盘的静电势问题[J]. 大学物理,2000,19(11): 1-4. doi: 10.3969/j.issn.1000-0712.2000.11.001WU Chongshi. Electrostatic potential of uniformly charged disc[J]. College Physics, 2000, 19(11): 1-4. doi: 10.3969/j.issn.1000-0712.2000.11.001 [23] ROBERTSON W. Modelling and design of magnetic levitation systems for vibration isolation[D]. Australia: The University of Adelaide , 2013. [24] VERMA S, KIM W J, GU J. Six-axis nanopositioning device with precision magnetic levitation technology[J]. IEEE/ASME Transactions on Mechatronics, 2004, 9(2): 384-391. doi: 10.1109/TMECH.2004.828648 [25] ZHANG C, LU Y H, LIU G C, et al. Research on one-dimensional motion control system and method of a magnetic levitation ball[J]. The Review of Scientific Instruments, 2019, 90(11): 115005.1-115005.9. -

 下载:
下载:



 点击查看大图
点击查看大图
计量
- 文章访问数: 957
- HTML全文浏览量: 305
- PDF下载量: 47
- 被引次数: 0