

Misalignment Vibration Detection of Magnetic Suspension Multi-Span Rotors Based on SOGI-FLL-WPF
-
摘要:
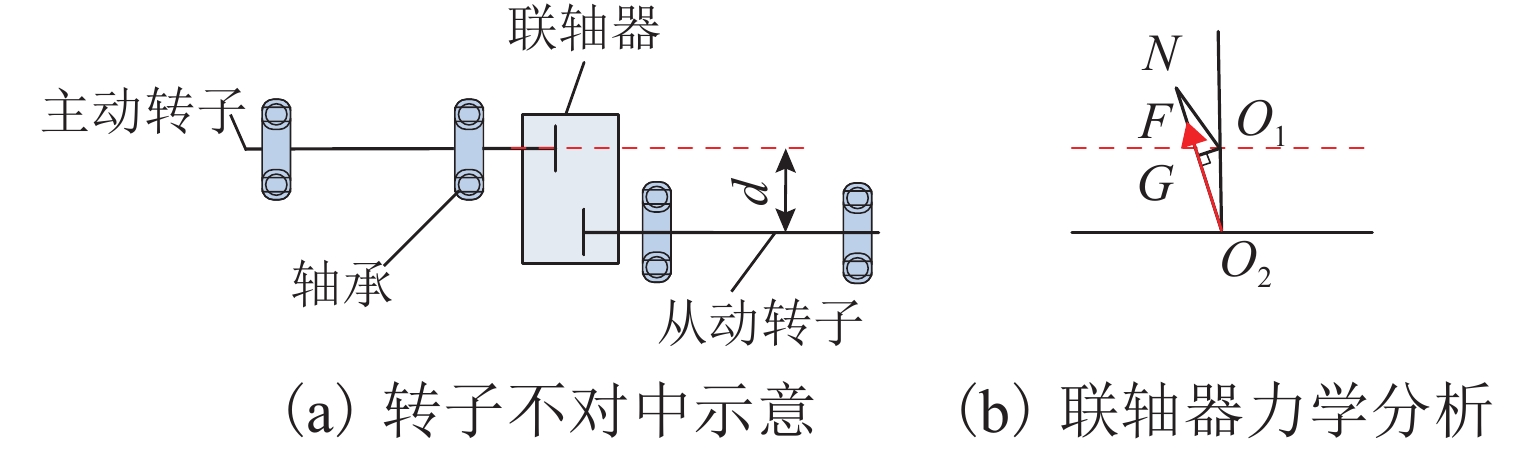
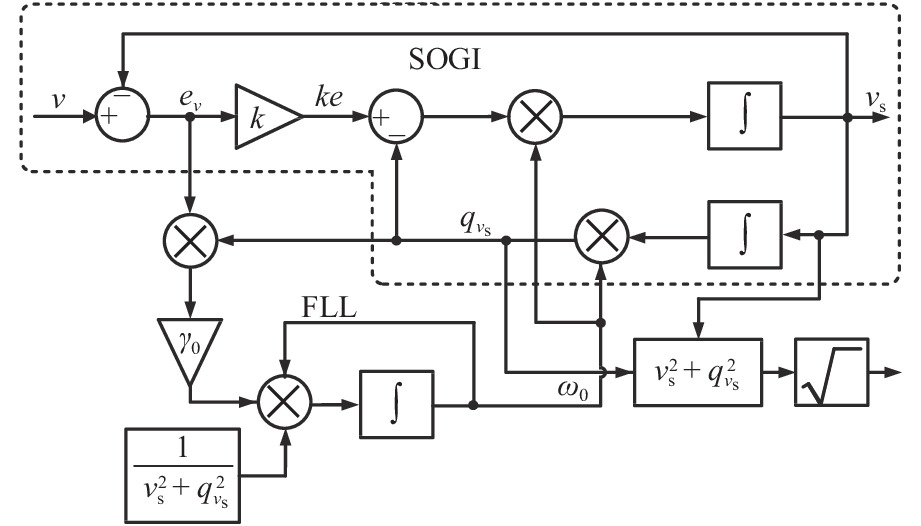
为解决磁悬浮多跨转子不对中振动检测问题,首先,建立磁悬浮转子系统动力学模型及联轴器不对中模型;其次,基于多跨转子力学模型模拟转子不对中振动状态,并采用二阶广义积分-锁频环(second order generalized integrator-frequency locked loop,SOGI-FLL)对振动信号进行转速辨识;然后,将转速辨识信息输入至SOGI进行转速同频陷波,进而利用带预滤波器的SOGI-FLL (SOGI-FLL with prefilter,SOGI-FLL-WPF)对陷波后的信号进行磁悬浮多跨转子不对中振动检测;最后,通过磁悬浮多跨转子定速和升速状态下的仿真计算,验证了本文提出多跨转子不对中振动检测方法的可行性. 实验结果表明:由转子不对中引起的转速二倍频振动信号可被快速辨识出幅值和频率,可为磁悬浮多跨设备的应用奠定基础.
-
关键词:
- 磁悬浮轴承 /
- 多跨转子 /
- 不对中振动 /
- SOGI-FLL-WPF /
- 振动检测
Abstract:Aiming at misalignment vibration detection of magnetic suspension multi-span rotors, the dynamic model of magnetic suspension rotor system and coupling misalignment model are firstly established. Secondly, the rotor misalignment vibration state is simulated based on the multi-span rotors mechanics model, and the speed of vibration signal is identified by second order generalized integrator-frequency locked loop (SOGI-FLL). Furthermore, the speed identification information is input to SOGI for co-frequency notch filtering, and then misalignment vibration detection of magnetic multi-span rotors is performed on the notch signal by SOGI-FLL with prefilter (SOGI-FLL-WPF). Finally, the feasibility of the proposed detection method is verified by the simulation of magnetic suspension multi-span rotors at constant and ascending speeds. The experimental results show that the amplitude and frequency of the vibration signal at double speed frequency caused by rotor misalignment can be quickly identified, which lays a foundation for the application of magnetic suspension multi-span equipment.
-
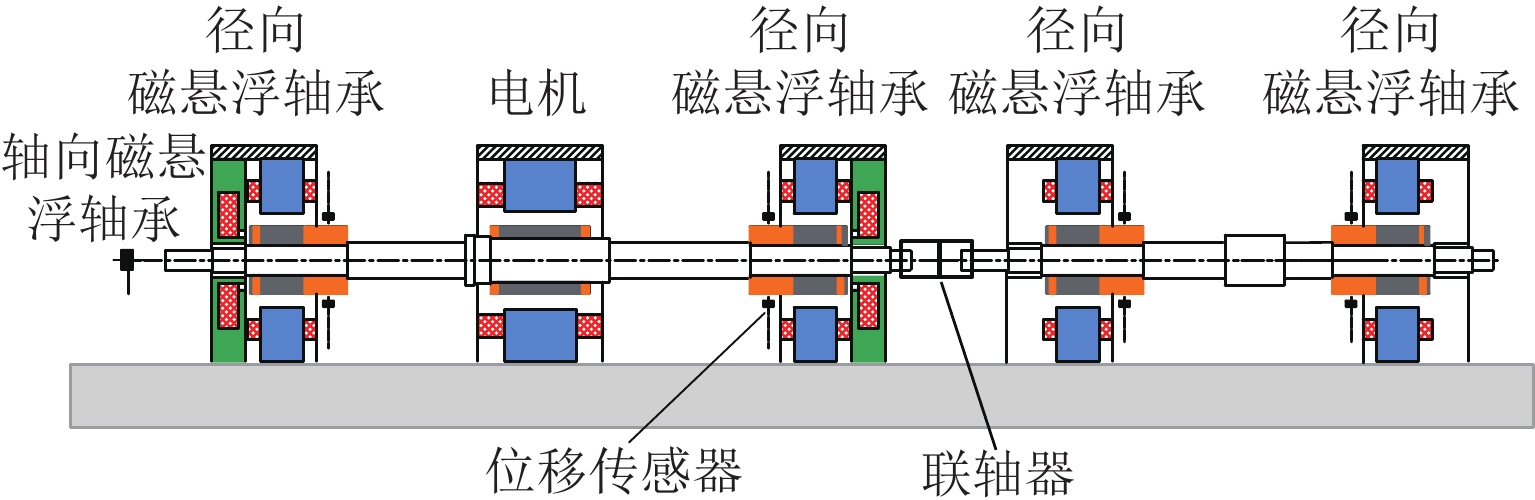
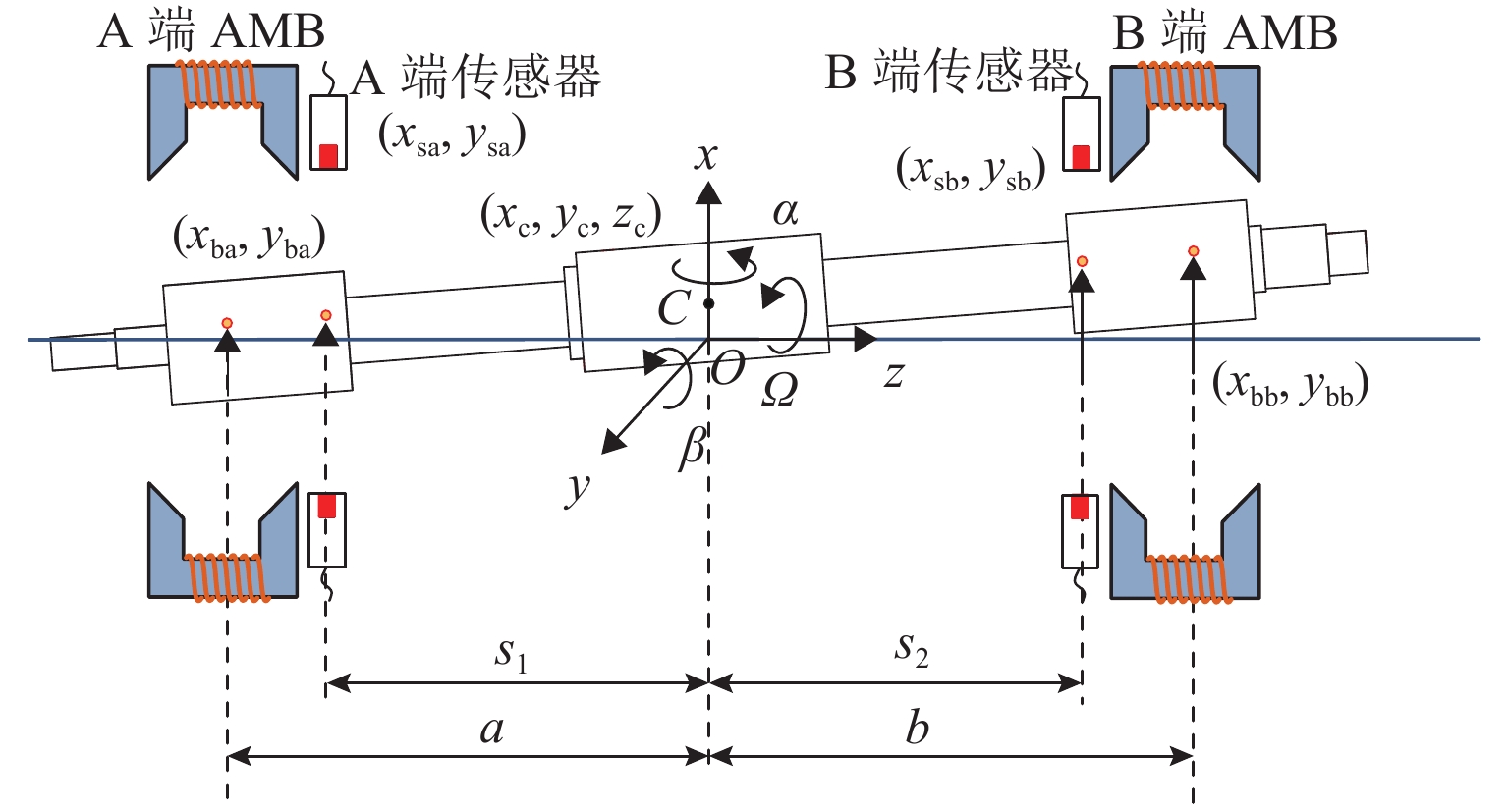
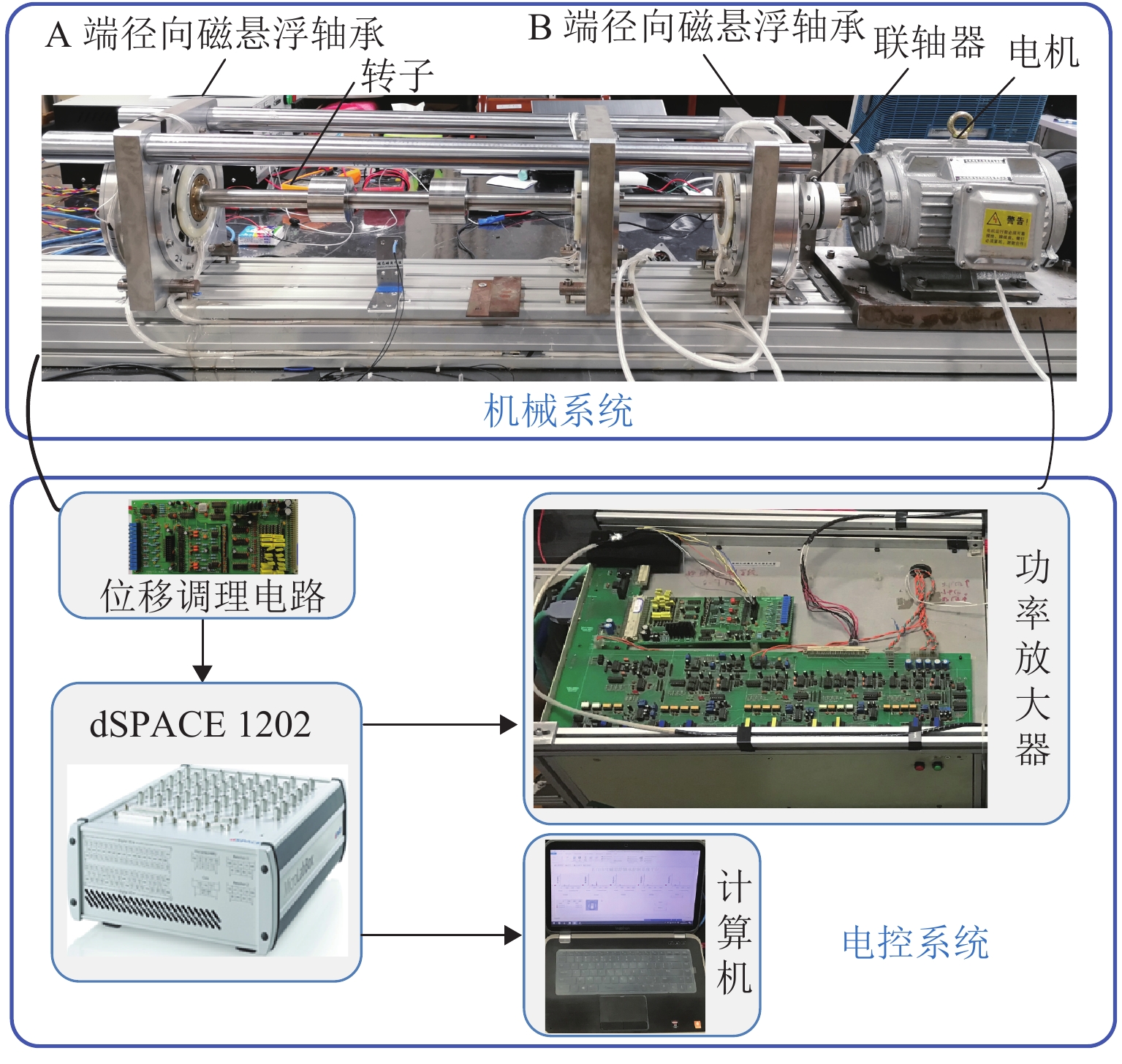
图 1 磁悬浮多跨转子平台示意
Figure 1. Schematic diagram of magnetic suspension multi-span rotors platform

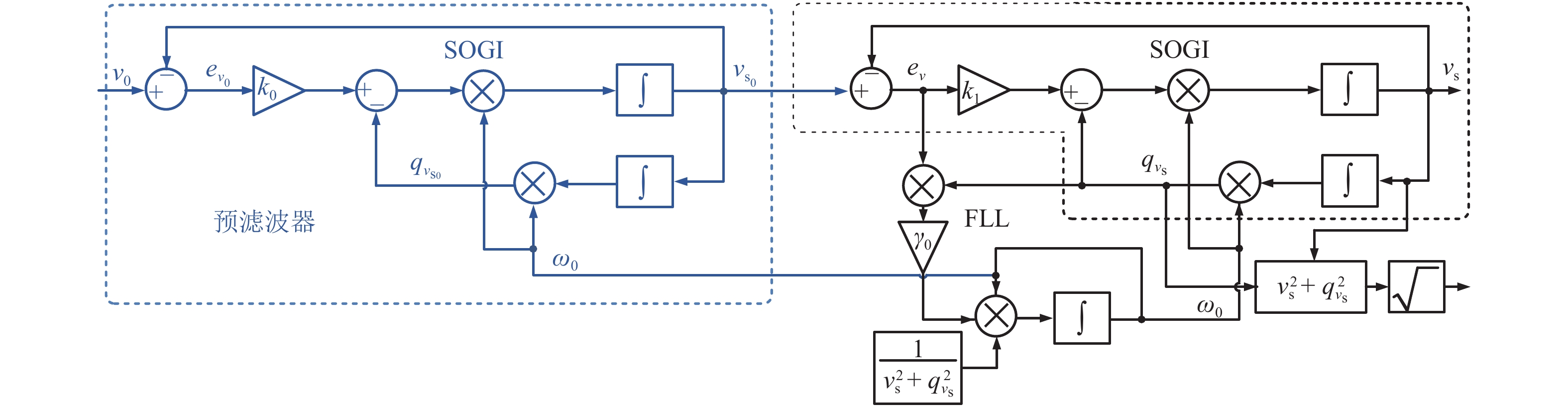
图 8 基于径向位移信号的转子不对中振动检测原理
Figure 8. Schematic diagram of rotor misalignment vibration detection based on radial displacement signal

图 10 转速为6000 r/min下转子位移信号频谱
Figure 10. Spectrum for displacement signal of rotor at 6000 r/min
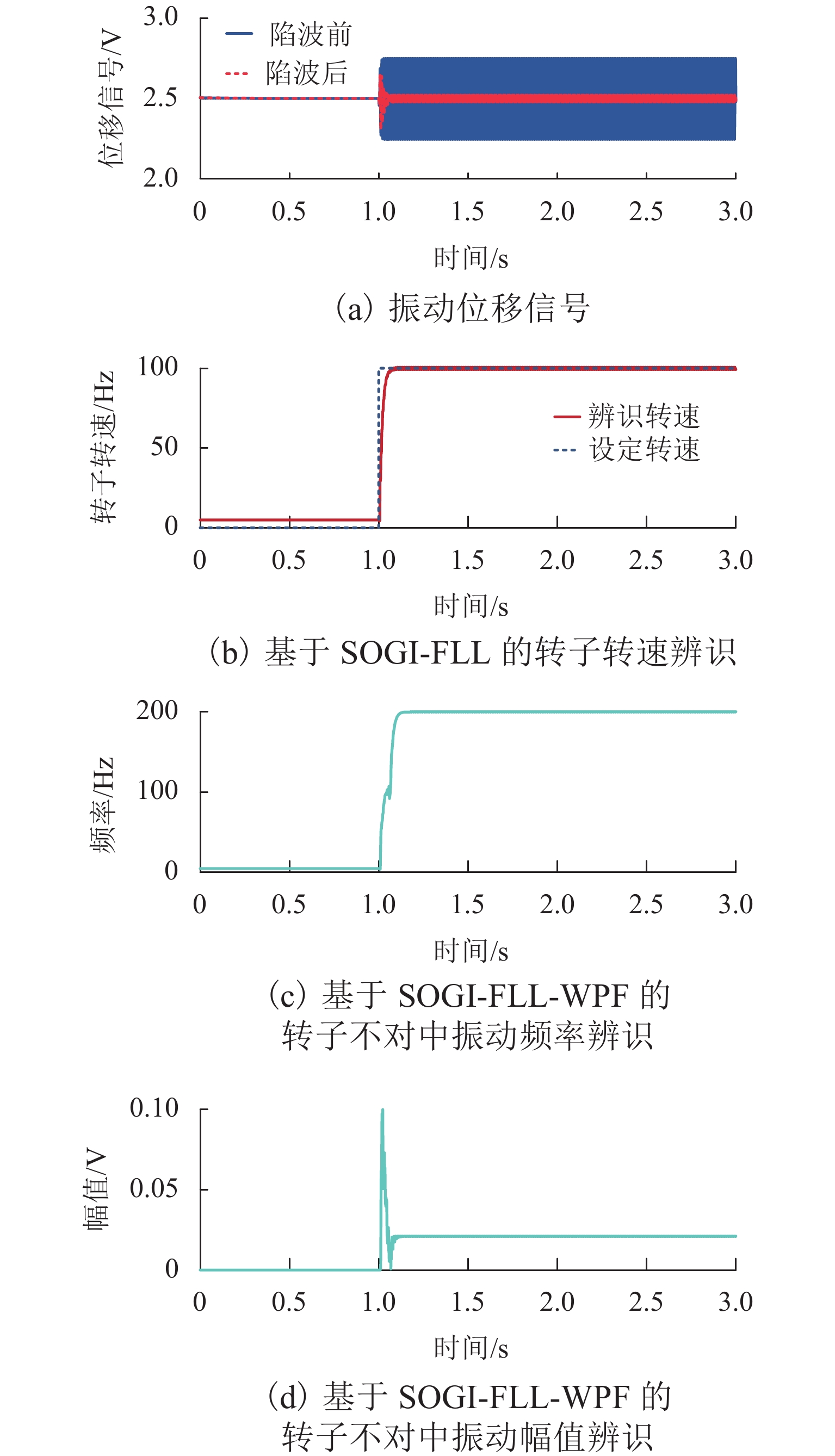
图 11 转速为6000 r/min下转子不对中振动检测结果
Figure 11. Misalignment vibration detection results of rotor at 6000 r/min
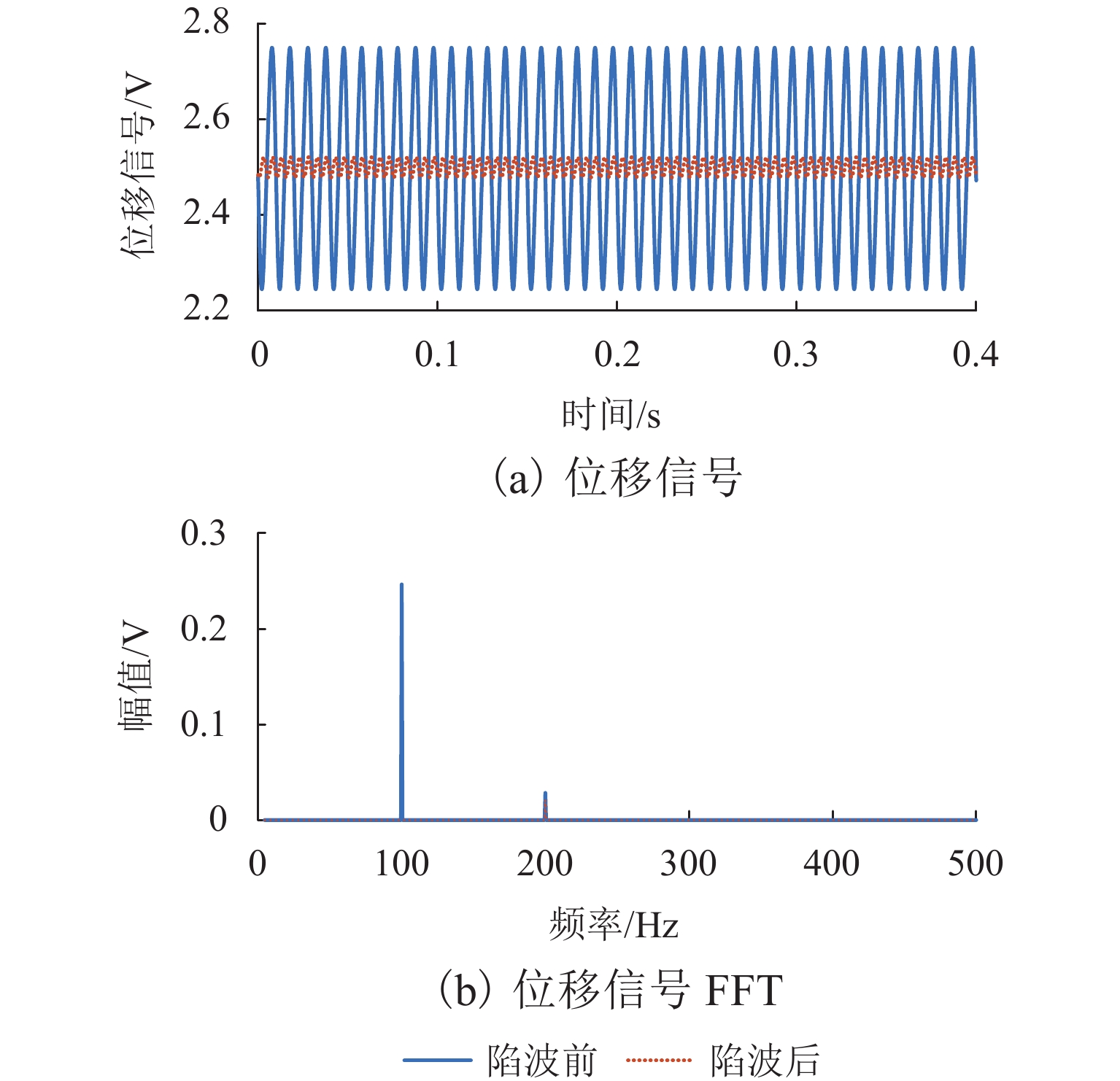
图 12 滤波前后转子振动位移频谱对比
Figure 12. Spectrum comparison of rotor vibration displacement before and after filtering
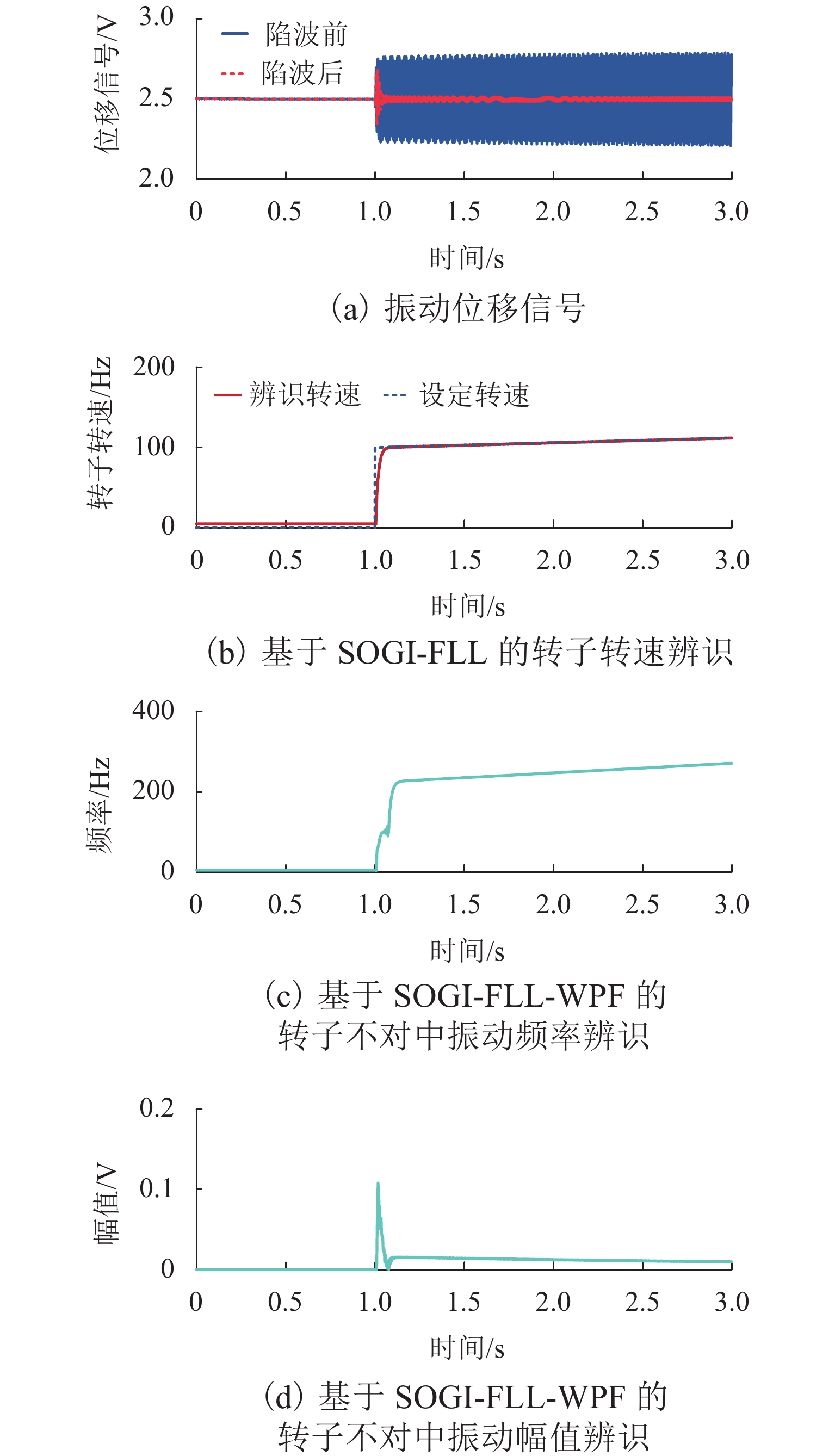
图 13 升速过程中转子不对中振动检测结果
Figure 13. Misalignment vibration detection results duringrotor acceleration

图 16 滤波前后转子振动位移频谱对比
Figure 16. Spectrum comparison of rotor vibration displacement before and after filtering
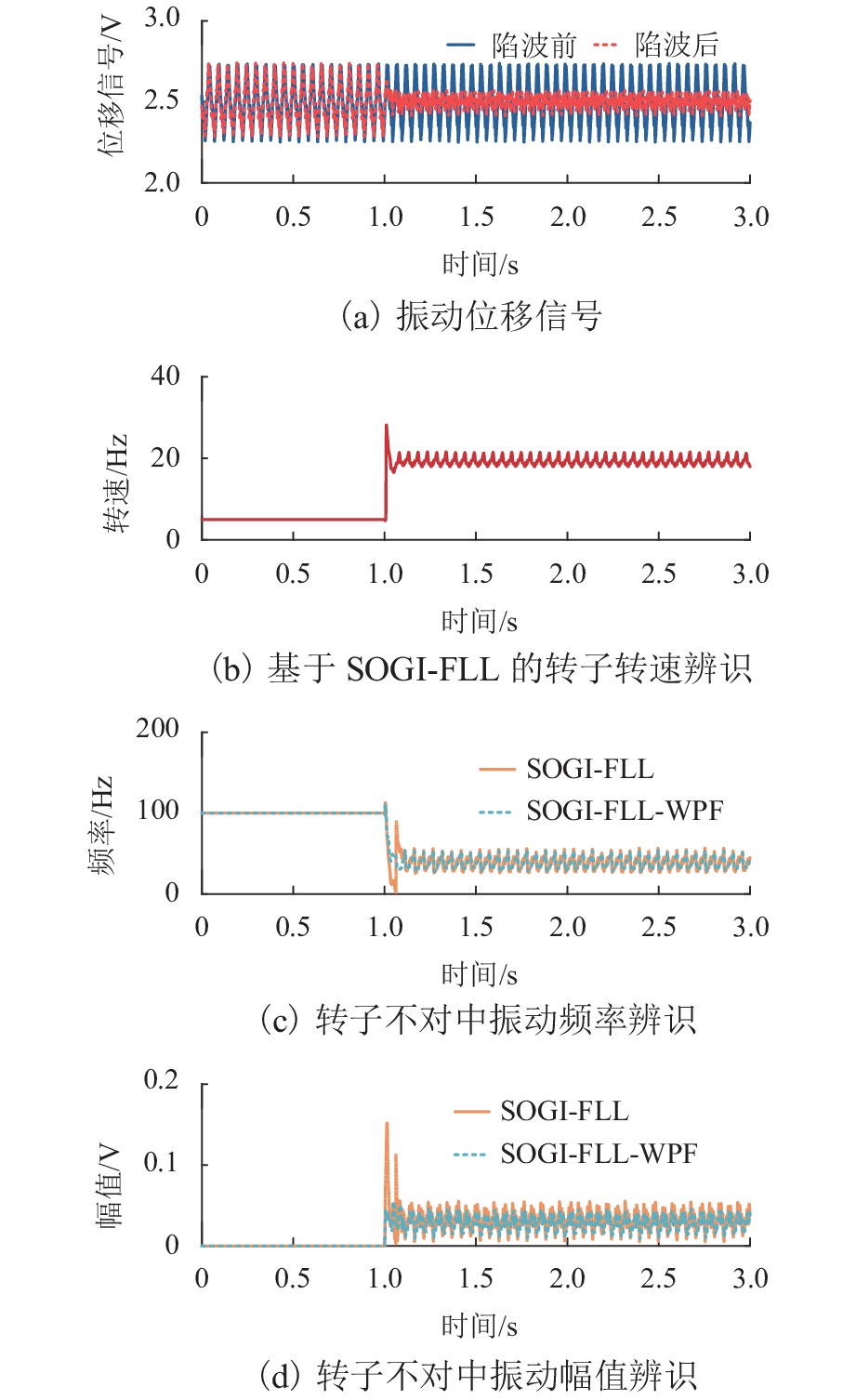
图 15 磁悬浮多跨转子不对中振动检测结果
Figure 15. Detection results for misalignment vibration of magnetic multi-span rotors
表 1 仿真参数
Table 1. Simulation parameters
参数 数值 m/kg 14.56 J/(kg·m2) 1.1729 Jz/(kg·m2) 1.4187 × 10−2 mu/kg 0.05 u/m 0.002 zu/m 0.01 d/μm 60 ${\varphi _0} $/(°) 0  下载: 导出CSV
下载: 导出CSV
-
[1] 韩清凯,王美令,赵广,等. 转子系统不对中问题的研究进展[J]. 动力学与控制学报,2016,14(1): 1-13. doi: 10.6052/1672-6553-2015-081HAN Qingkai, WANG Meiling, ZHAO Guang, et al. A review of rotor systems with misalignment[J]. Journal of Dynamics and Control, 2016, 14(1): 1-13. doi: 10.6052/1672-6553-2015-081 [2] 张宏献,李学军,蒋玲莉,等. 航空发动机双转子系统不对中研究进展[J]. 航空学报,2019,40(6): 42-53.ZHANG Hongxian, LI Xuejun, JIANG Lingli, et al. A review of misalignment of aero-engine rotor system[J]. Acta Aeronautica et Astronautica Sinica, 2019, 40(6): 42-53. [3] 刘占生,赵广,龙鑫. 转子系统联轴器不对中研究综述[J]. 汽轮机技术,2007,49(5): 321-325. doi: 10.3969/j.issn.1001-5884.2007.05.001LIU Zhansheng, ZHAO Guang, LONG Xin. Survey of the research on coupling with misalignment of rotary machinery[J]. Turbine Technology, 2007, 49(5): 321-325. doi: 10.3969/j.issn.1001-5884.2007.05.001 [4] VERUCCHI C, BOSSIO J, BOSSIO G, et al. Misalignment detection in induction motors with flexible coupling by means of estimated torque analysis and MCSA[J]. Mechanical Systems and Signal Processing, 2016, 80: 570-581. doi: 10.1016/j.ymssp.2016.04.035 [5] 蒋玲莉,陈雨蒙,李学军,等. 双转子系统联轴器不对中振动响应分析[J]. 机械科学与技术,2019,38(9): 1350-1356.JIANG Lingli, CHEN Yumeng, LI Xuejun, et al. Vibration analysis of dual-rotor system with coupling misalignment[J]. Mechanical Science and Technology for Aerospace Engineering, 2019, 38(9): 1350-1356. [6] 潘宏刚,庞智元,肖增弘,等. 多跨转子系统联轴器偏角不对中试验研究[J]. 动力工程学报,2020,40(4): 305-310,316.PAN Honggang, PANG Zhiyuan, XIAO Zenghong, et al. Experimental study on misalignment of coupling deflection angle in multi-span rotor system[J]. Journal of Chinese Society of Power Engineering, 2020, 40(4): 305-310,316. [7] 宾光富,李学军,沈意平,等. 基于动力学有限元模型的多跨转子轴系无试重整机动平衡研究[J]. 机械工程学报,2016,52(21): 78-86. doi: 10.3901/JME.2016.21.078BIN Guangfu, LI Xuejun, SHEN Yiping, et al. Whole-machine dynamic balancing method without trial weights for multi-span rotor shafting based on dynamic finite element model[J]. Journal of Mechanical Engineering, 2016, 52(21): 78-86. doi: 10.3901/JME.2016.21.078 [8] 姚红良,丛艳,许琦,等. 多跨碰摩转子系统分析的降维增量谐波平衡法[J]. 东北大学学报(自然科学版),2015,36(7): 991-995. doi: 10.3969/j.issn.1005-3026.2015.07.017YAO Hongliang, CONG Yan, XU Qi, et al. Dimension-reduced incremental harmonic balance method for multi-span rubbing rotor system[J]. Journal of Northeastern University (Natural Science), 2015, 36(7): 991-995. doi: 10.3969/j.issn.1005-3026.2015.07.017 [9] DA SILVA TUCKMANTEL F W, CAVALCA K L. Vibration signatures of a rotor-coupling-bearing system under angular misalignment[J]. Mechanism and Machine Theory, 2019, 133: 559-583. doi: 10.1016/j.mechmachtheory.2018.12.014 [10] 李明,李自刚. 联轴器不对中故障转子系统的动力学试验[J]. 振动、测试与诊断,2015,35(2): 345-351,402.LI Ming, LI Zigang. Theoretical and experimental study on dynamics of rotor-bearing system with the faults of coupling misalignment[J]. Journal of Vibration, Measurement & Diagnosis, 2015, 35(2): 345-351,402. [11] 黄志伟,周建中,张勇传. 水轮发电机组转子不对中-碰摩耦合故障动力学分析[J]. 中国电机工程学报,2010,30(8): 88-93.HUANG Zhiwei, ZHOU Jianzhong, ZHANG Yongchuan. Dynamic analysis on hydraulic generator rotors with coupling faults of misalignment and rub-impact[J]. Proceedings of the CSEE, 2010, 30(8): 88-93. [12] 李丽,肖增弘,张超臣,等. 多跨多支点转子系统平行不对中故障研究[J]. 沈阳工程学院学报(自然科学版),2019,15(4): 312-316.LI Li, XIAO Zenghong, ZHANG Chaochen, et al. Research on parallel misalignment of multi-span multi-supports rotor system[J]. Journal of Shenyang Institute of Engineering (Natural Science), 2019, 15(4): 312-316. [13] 许琦,吴昊,赵立超,等. 多跨转子系统耦合故障定量诊断方法[J]. 振动工程学报,2015,28(3): 495-502.XU Qi, WU Hao, ZHAO Lichao, et al. Quantitative coupling fault diagnosis method of multi-span rotor based on harmonic components[J]. Journal of Vibration Engineering, 2015, 28(3): 495-502. [14] 王晨阳,何立东. 转子动力吸振器在线抑制多跨转子过临界振动的实验研究[J]. 中国电机工程学报,2015,35(18): 4715-4724.WANG Chenyang, HE Lidong. Experimental study on over-critical speed vibration online control of multi-span rotors by rotor dynamic vibration absorber[J]. Proceedings of the CSEE, 2015, 35(18): 4715-4724. [15] 王金健,徐晖,祝长生. 多跨转子系统多频传递力变步长神经网络控制[J]. 机械工程学报,2021,57(4): 10-20. doi: 10.3901/JME.2021.04.010WANG Jinjian, XU Hui, ZHU Changsheng. Variable-step neural network control for multi-frequency transmission forces of multi-span rotor systems[J]. Journal of Mechanical Engineering, 2021, 57(4): 10-20. doi: 10.3901/JME.2021.04.010 [16] BOUAZIZ S, MESSAOUD N B, MATAAR M, et al. A theoretical model for analyzing the dynamic behavior of a misaligned rotor with active magnetic bearings[J]. Mechatronics, 2011, 21(6): 899-907. doi: 10.1016/j.mechatronics.2011.05.001 [17] KUPPA S K, LAL M. Dual flexible rotor system with active magnetic bearings for unbalance and coupling misalignment faults analysis[J]. Sādhanā, 2019, 44(8): 1-16. [18] 马俊骁,盛伟,潘宏刚. 双跨转子平行不对中故障研究[J]. 沈阳工程学院学报(自然科学版),2020,16(1): 25-29.MA Junxiao, SHENG Wei, PAN Honggang. Research on parallel misalignment fault of double-span rotor[J]. Journal of Shenyang Institute of Engineering (Natural Science), 2020, 16(1): 25-29. [19] MATAS J, CASTILLA M, MIRET J, et al. An adaptive prefiltering method to improve the speed/accuracy tradeoff of voltage sequence detection methods under adverse grid conditions[J]. IEEE Transactions on Industrial Electronics, 2014, 61(5): 2139-2151. [20] International Organization for Standardization. Mechanical vibration: vibration of rotating machinery equipped with active magnetic bearings, part 2: evaluation of vibration: ISO14839-2: 2014[S]. [S.l.]: BSI, 2004. -

 下载:
下载:



 点击查看大图
点击查看大图
计量
- 文章访问数: 362
- HTML全文浏览量: 260
- PDF下载量: 17
- 被引次数: 0