Editor-in-Chief: Zhai Wanming
Associate Editor-in-Chief: Li Hengchao WANG Kelvin C.P.
Launched: 1954
Sponsored by:Journal of Southwest Jiaotong University
Tel: 028-66367562
Fax: 028-66366552
E-mail: xbz@home.swjtu.edu.cn
Cycle: bi-monthly
Search  Advance Search
Advance Search
Journal Search
Search Type
instruction for authors
LinksMore 
-
Southwest Jiaotong University
-
Ministry of Education of People's Republic of China
-
Society of China Universitiy Journals
-
WANFANG DATA
-
Ei Engineering Village
-
CNKI
-
China Journal Net
-
Journal of Modern Transportation
-
Journalof SouthwestJiaotong University(Socia Science)
-
Refrigeration and Air Conditioning
 Email alert
Email alert RSS
RSS

 [Abstract]
[Abstract] [FullText HTML]
[FullText HTML] PDF 1930KB
PDF 1930KB Supplements
Supplements
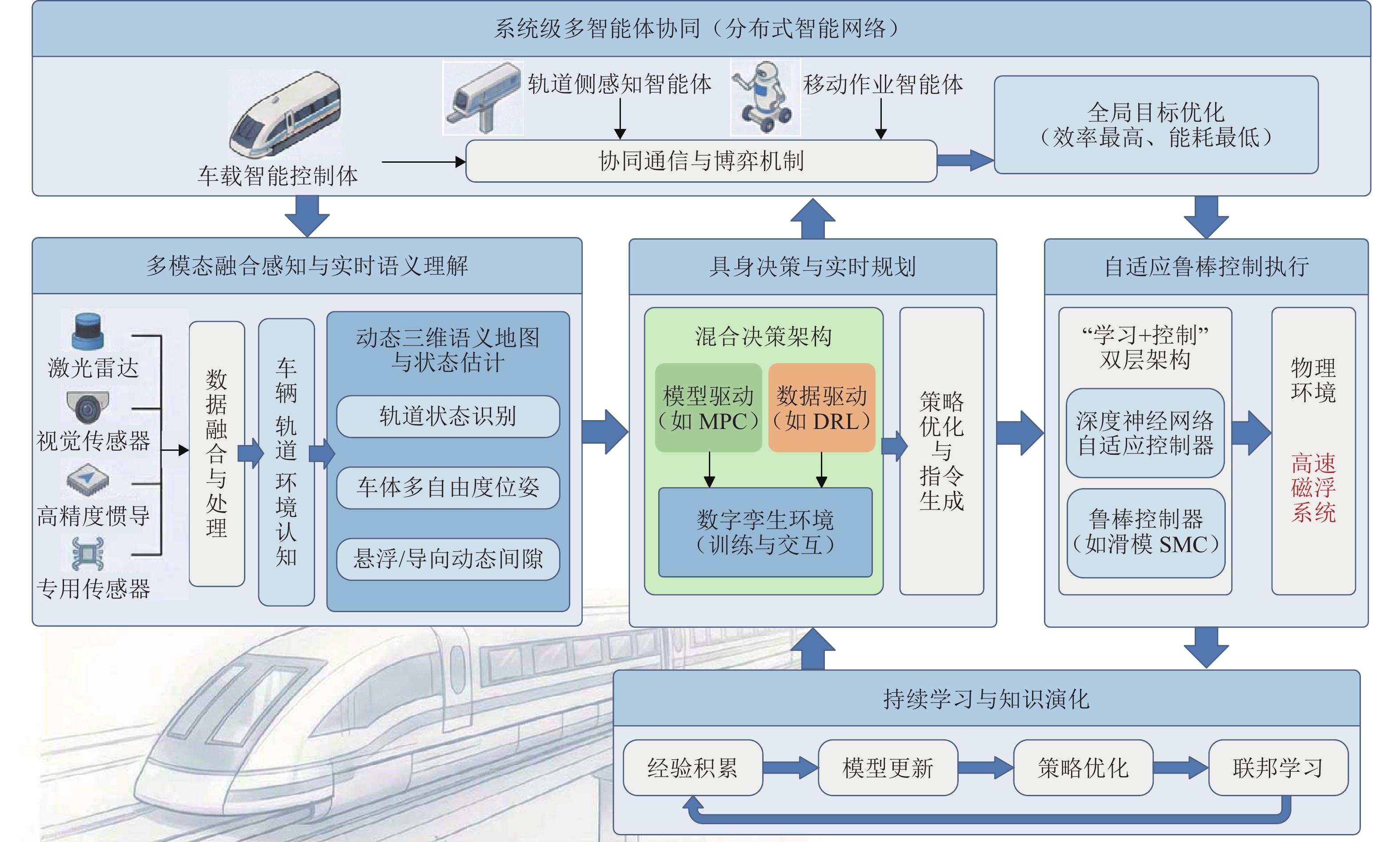
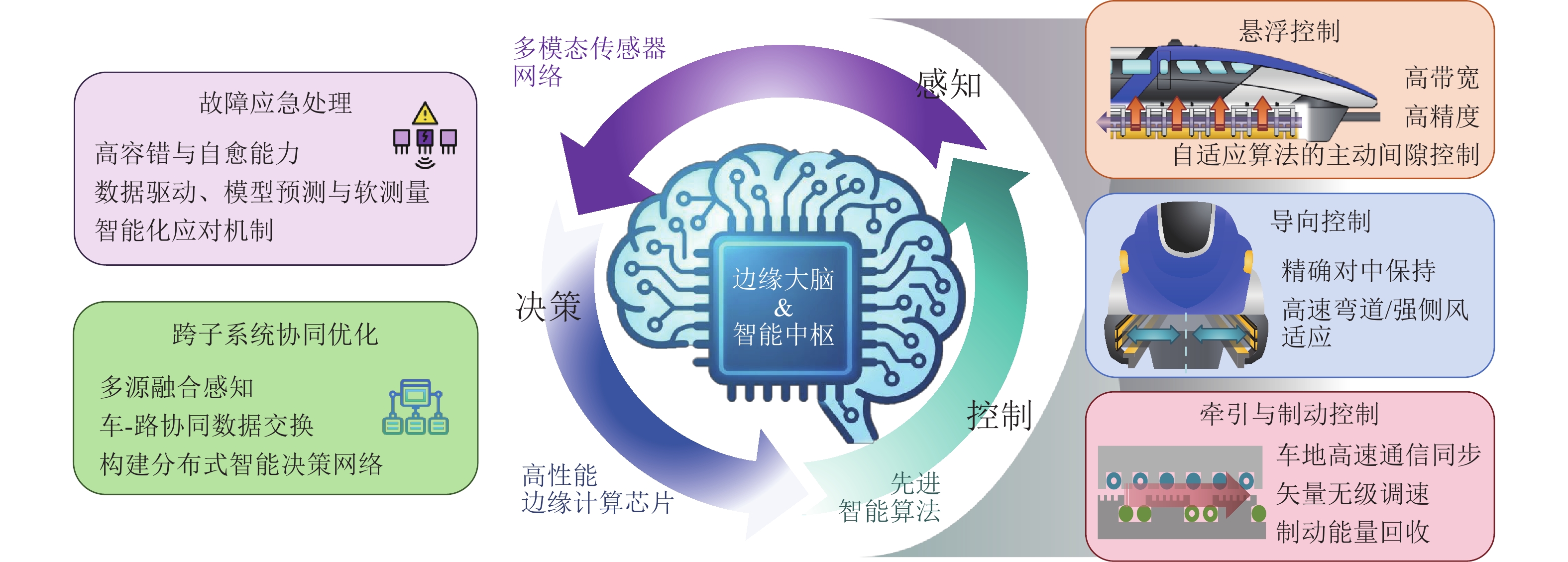
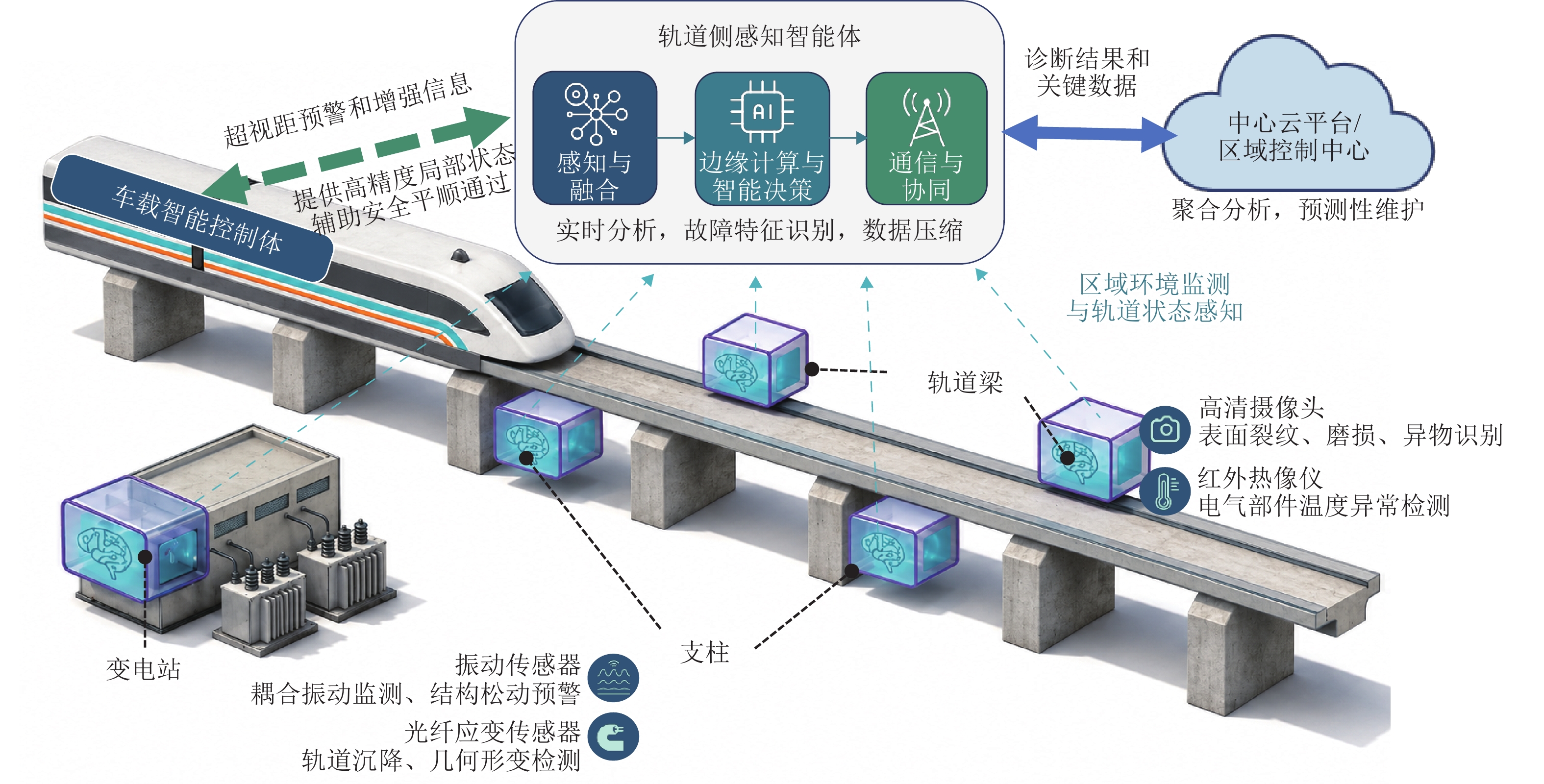
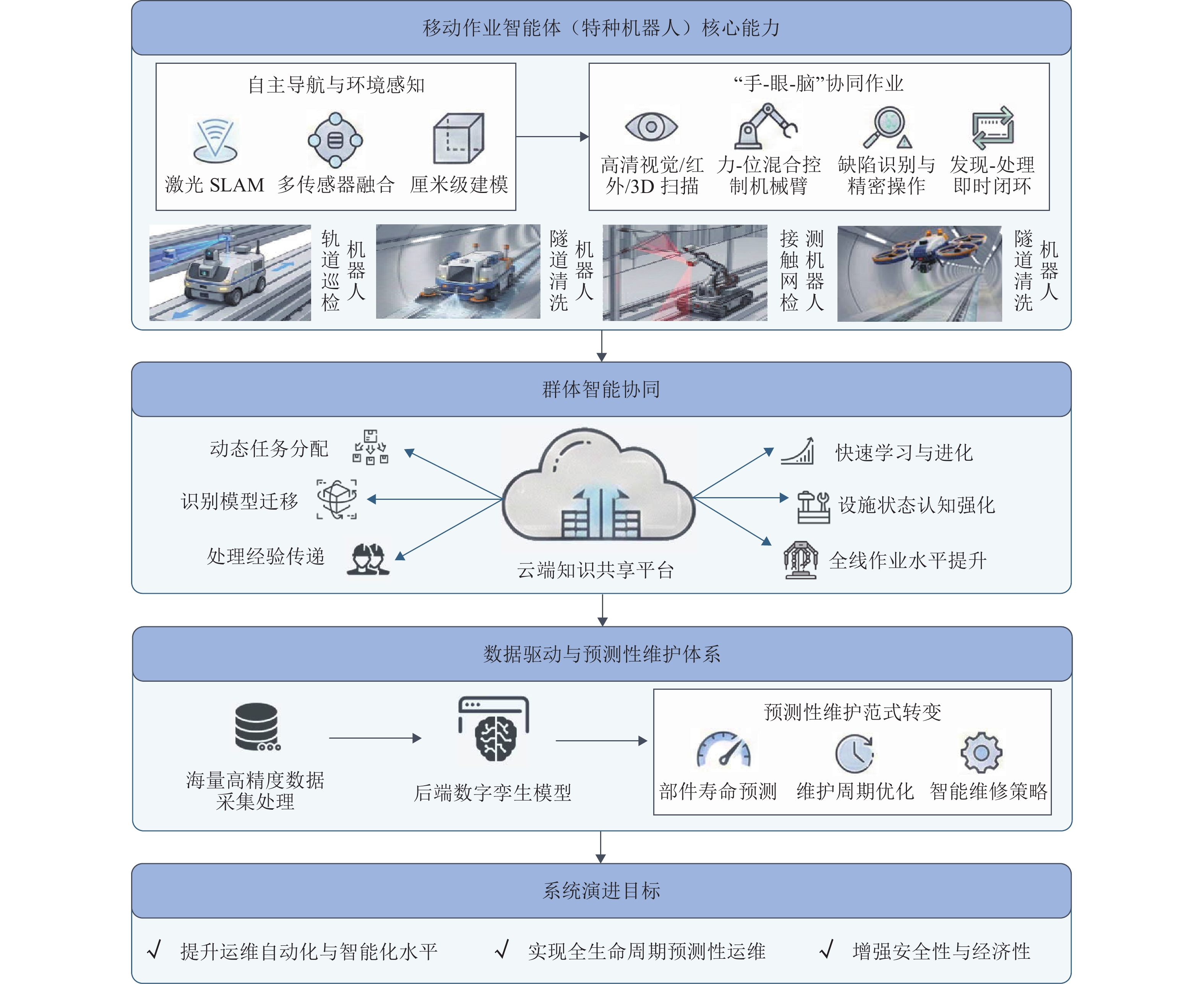
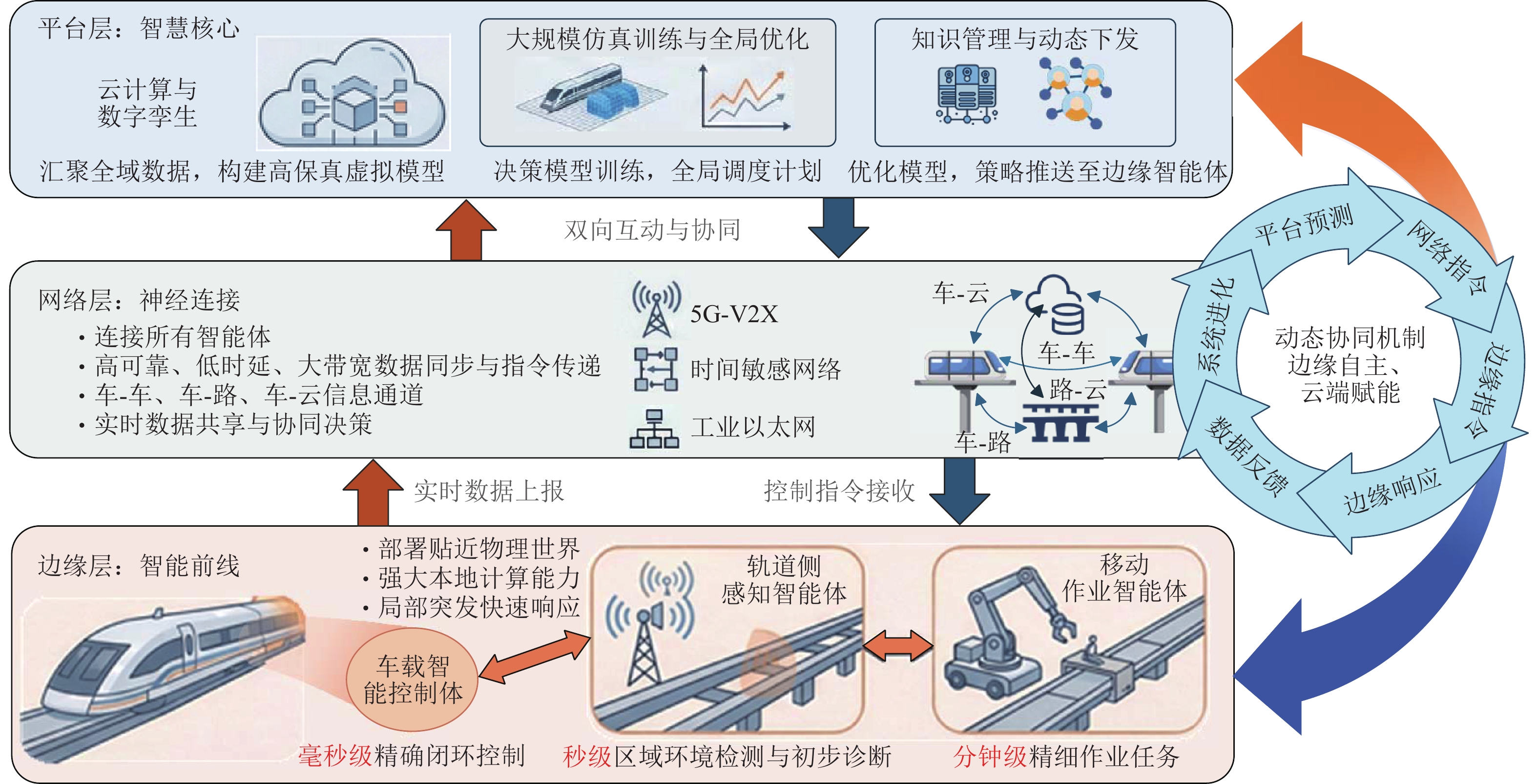
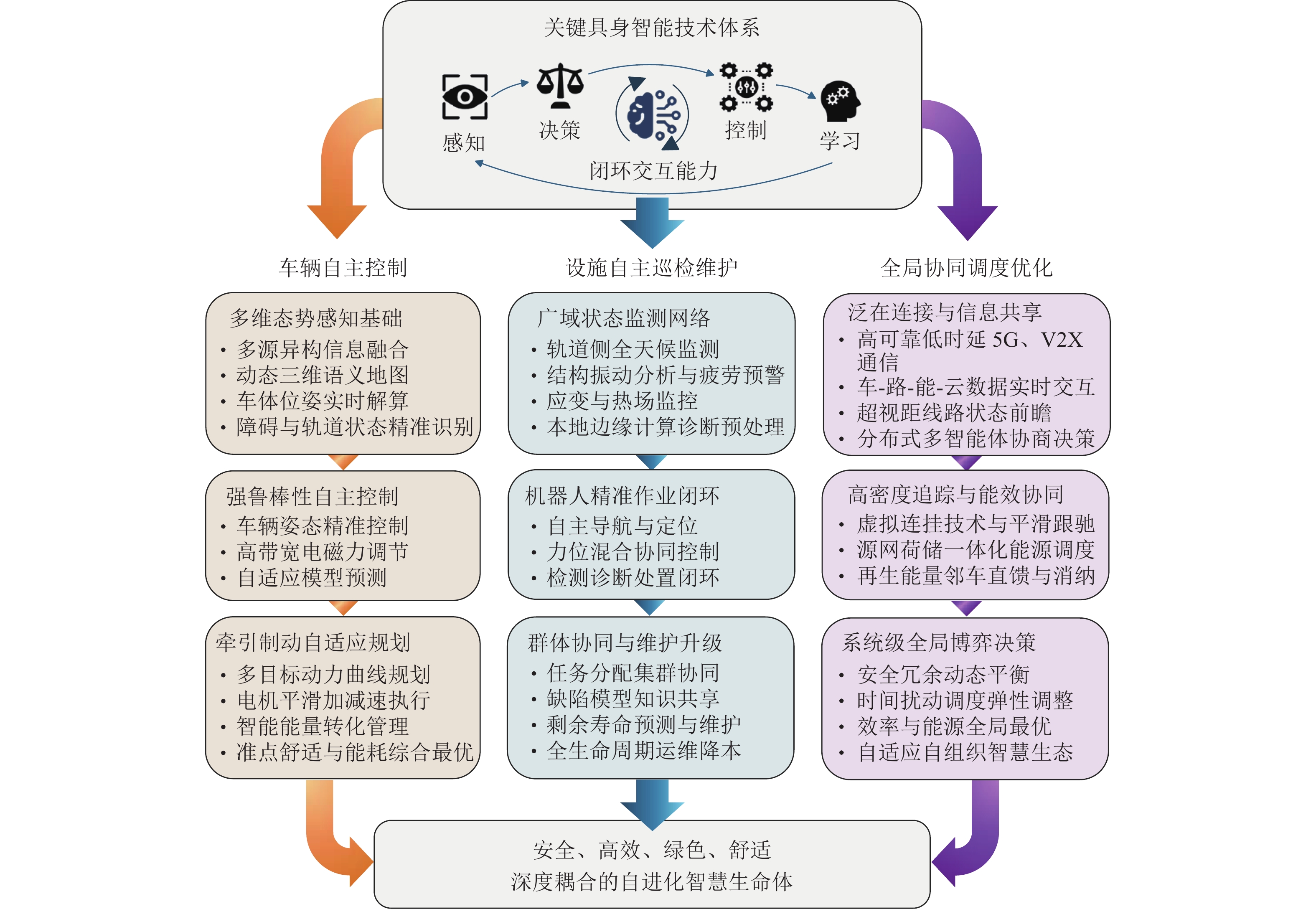
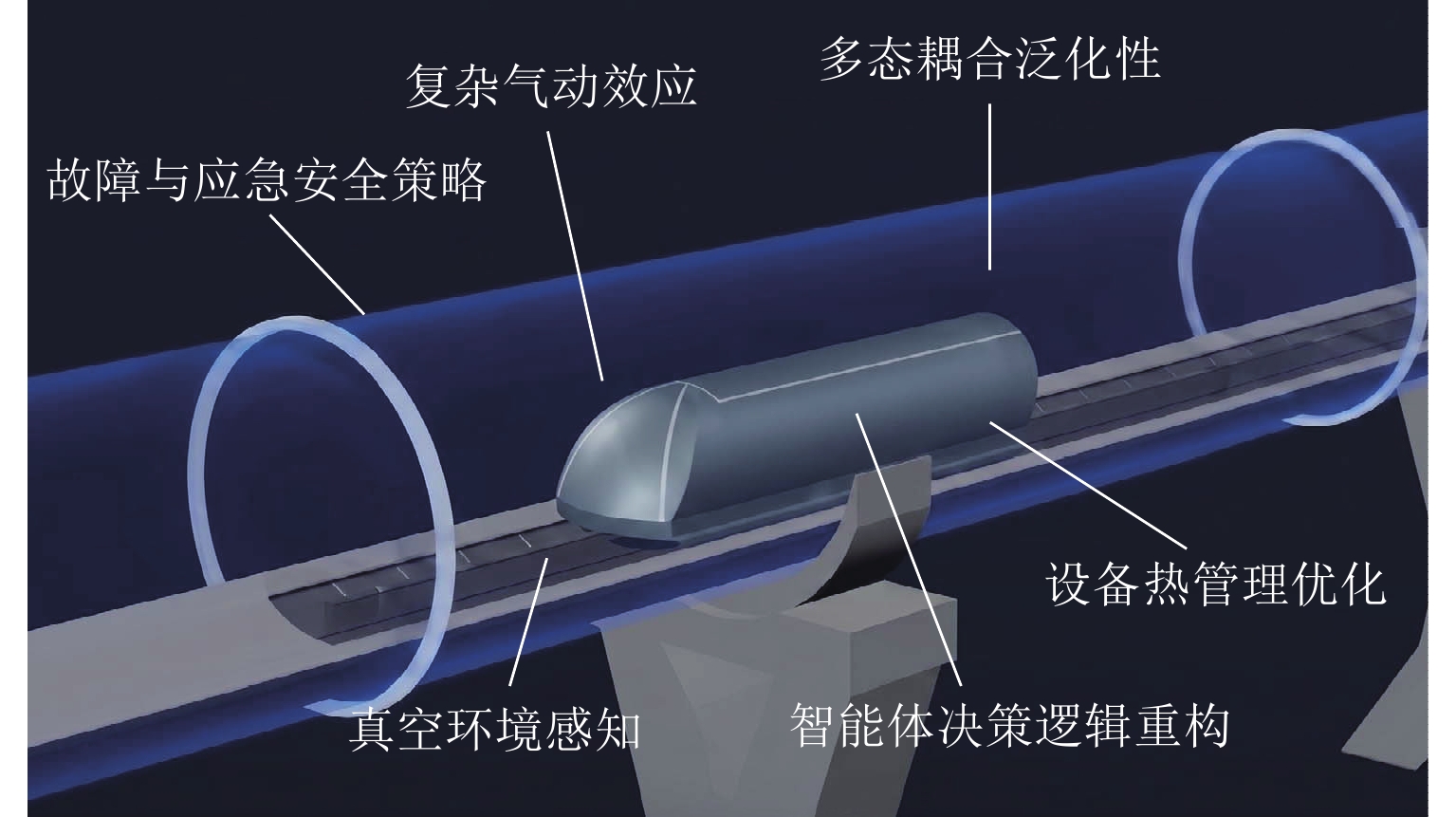
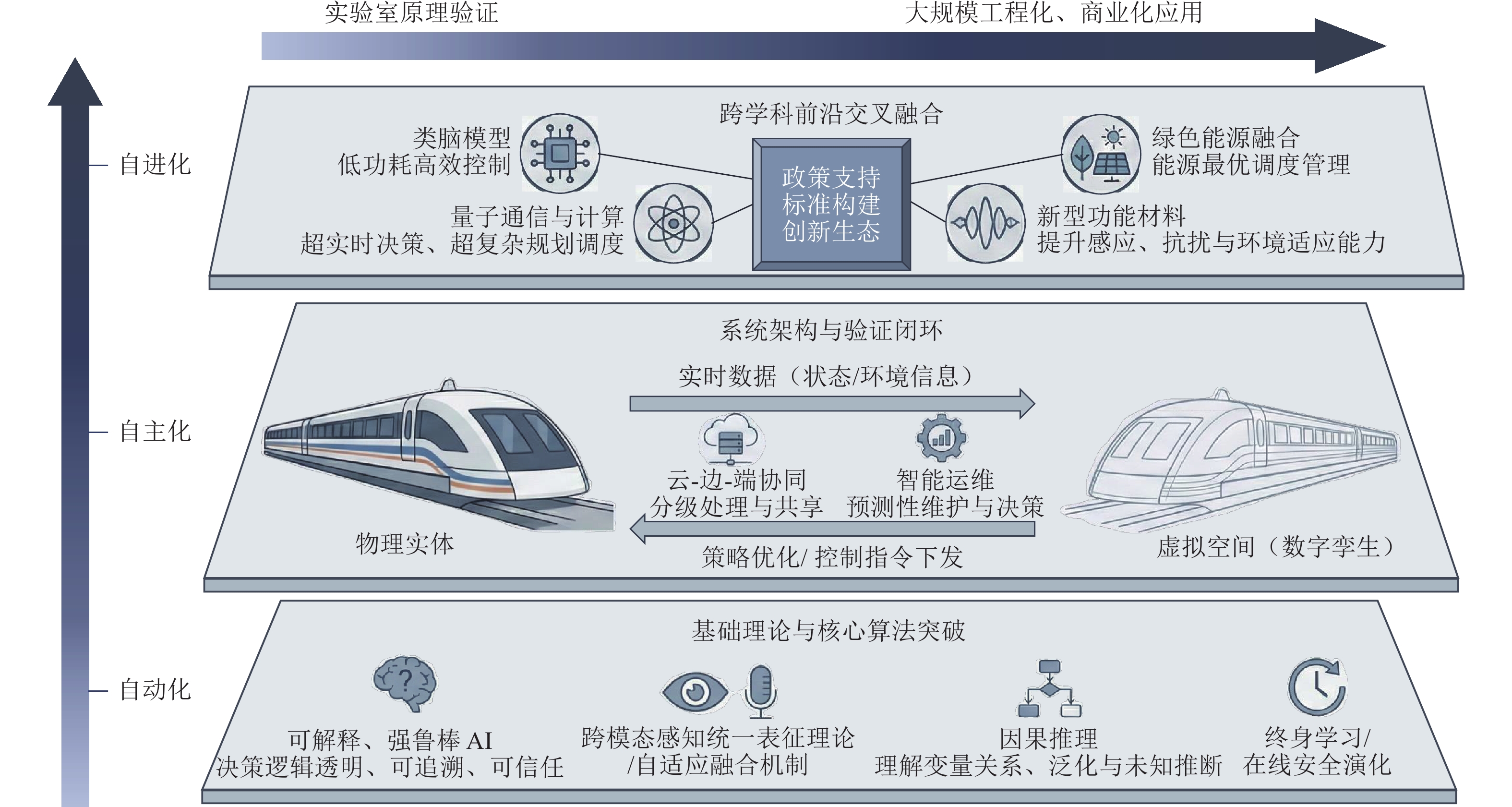
Maglev transportation systems have become an important development direction for future rail transit by virtue of their advantages such as non-contact operation, high speed, and low noise; however, their complex operating environments, high safety requirements, and high operation and maintenance costs put forward higher requirements for the autonomous perception, decision-making, and control capabilities of the systems. In this context, critical embodied intelligence, as an important paradigm of next-generation artificial intelligence, emphasizes the real-time interaction and continuous learning between intelligent agents (such as onboard intelligent control agents, trackside sensing agents, and robots) and the physical environment, promotes the deep integration of perception, decision-making, and control, and provides a new technical pathway for the intelligent development of maglev transportation systems. In specific applications, critical embodied intelligence firstly empowers operational safety and the precise control of levitation and guidance. By fusing multimodal sensor data to dynamically construct the vehicle-track-environment situation, it achieves millimeter-level perception, state prediction, and the autonomous generation of levitation-guidance and traction-braking strategies, ensuring stability and comfort under extreme working conditions; secondly, in the field of autonomous infrastructure inspection and intelligent maintenance, robots or unmanned aerial vehicles driven by embodied intelligence can replace manual labor to execute high-risk tasks, identify defects through interactive detection, predict component lifespans based on experience, and optimize maintenance cycles; finally, in terms of global scheduling and collaborative optimization, multiple embodied intelligent agents constitute a distributed system, and by sharing local perception information, they dynamically negotiate and adjust timetables to achieve high-density, collaborative, and energy-efficiency optimized operations of train groups. In summary, critical embodied intelligence is driving the transformation of maglev transportation systems from “automated execution” to “autonomous evolution”. While enhancing safety, operational efficiency, and system resilience, it helps to reduce full life-cycle costs and is a key pathway to constructing the next-generation adaptive and evolvable intelligent rail transit. Future research should focus on the high-reliability validation of intelligent agents, multi-agent collaboration mechanisms, and robustness enhancement in complex environments to accelerate their engineering application process.
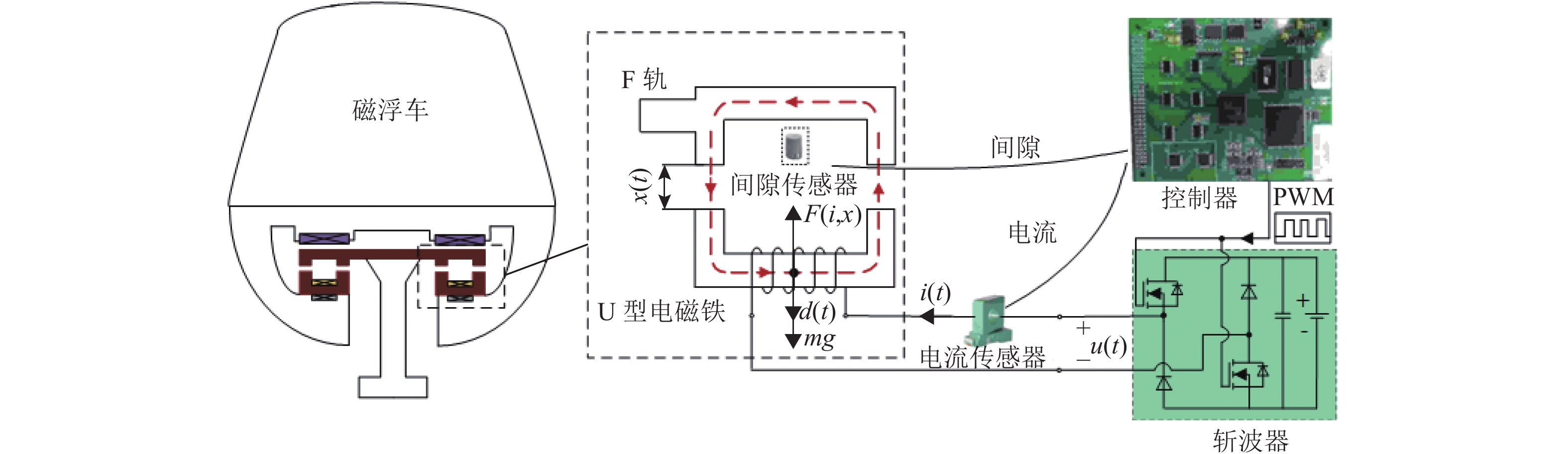
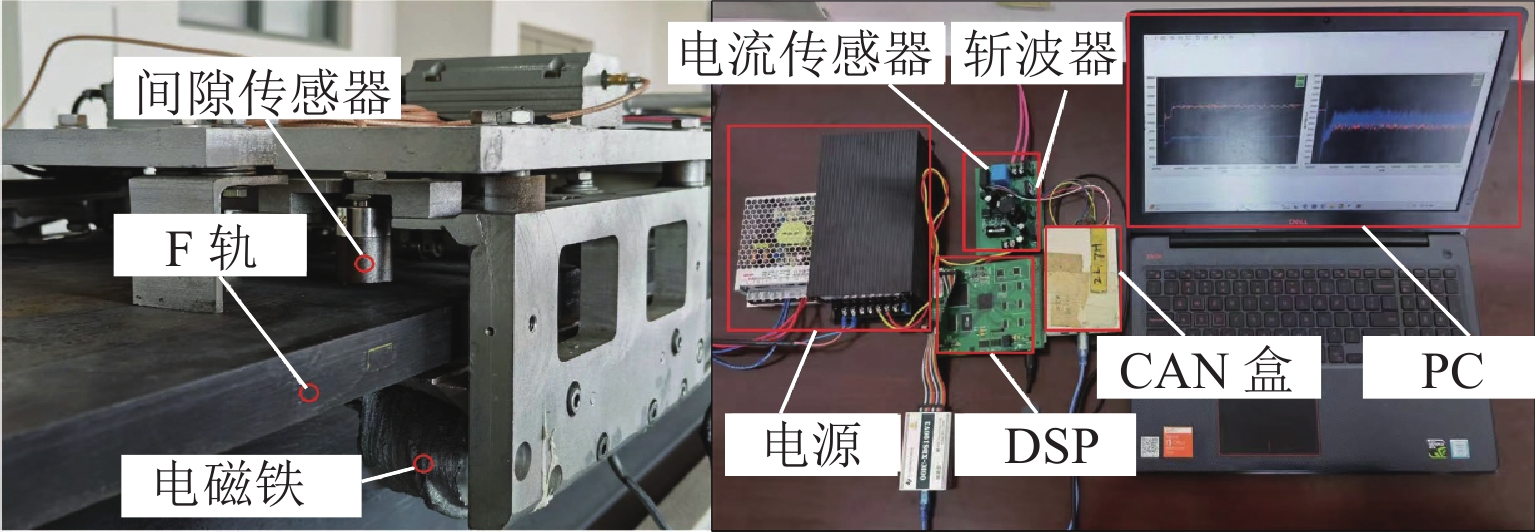
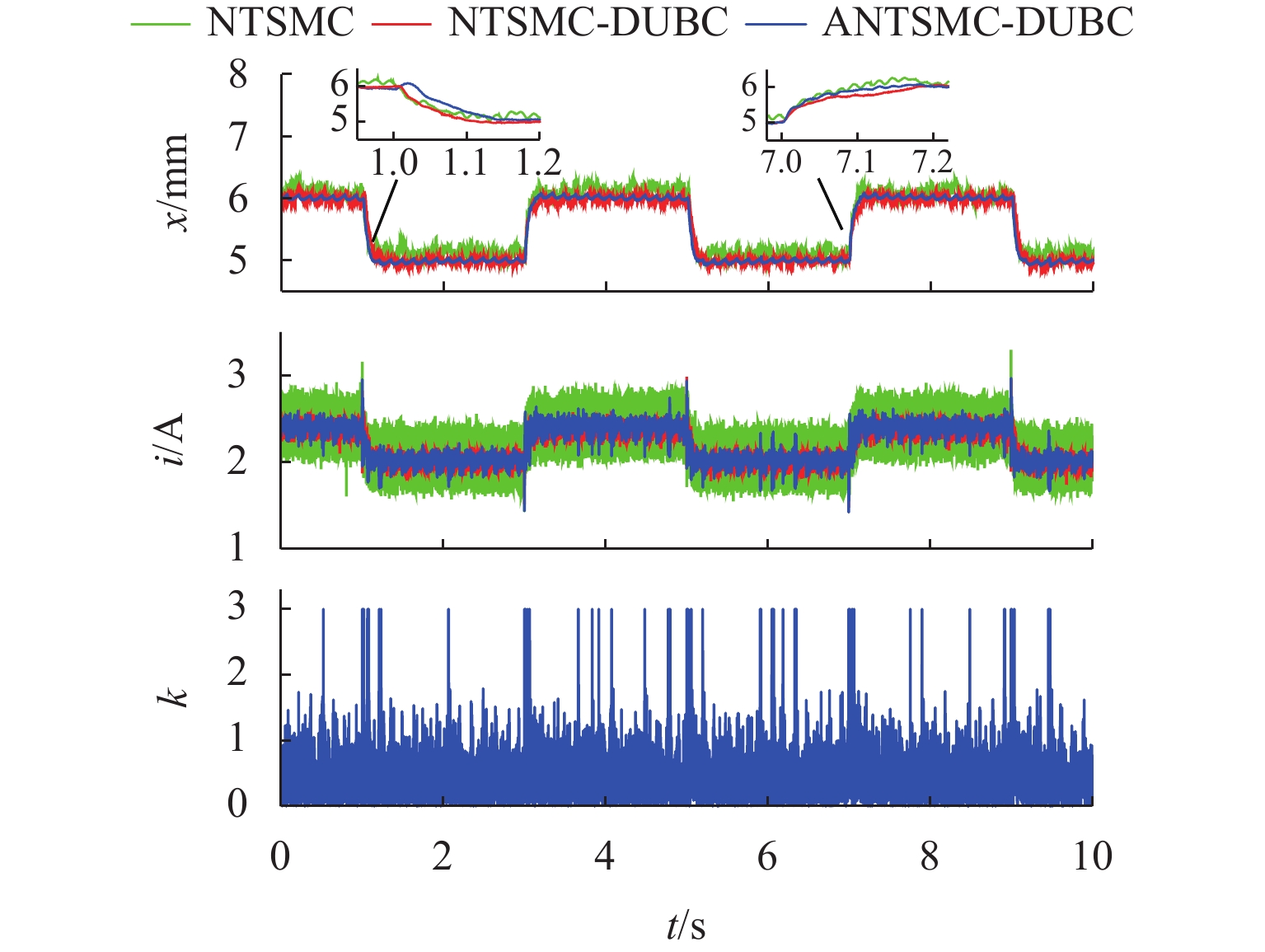
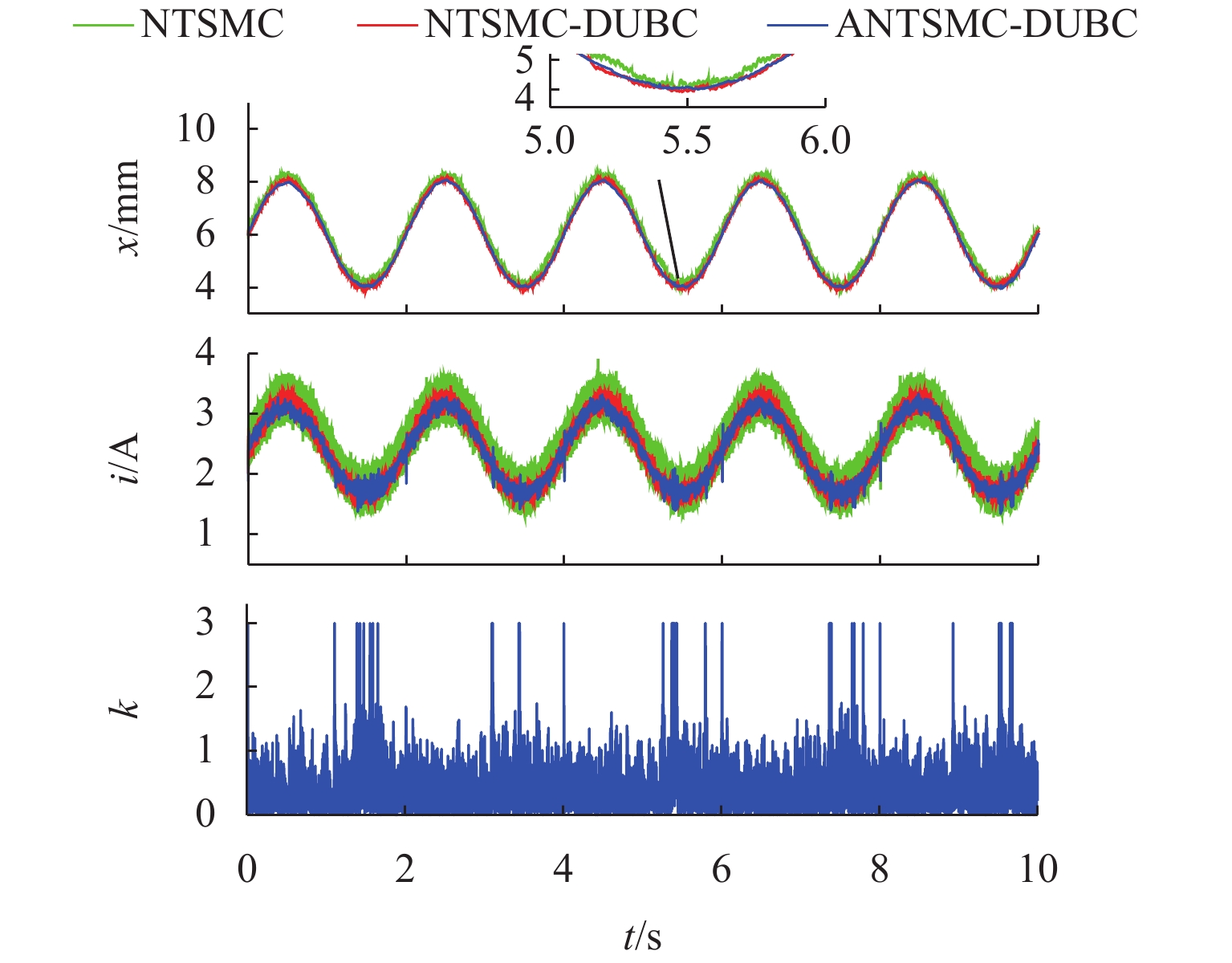
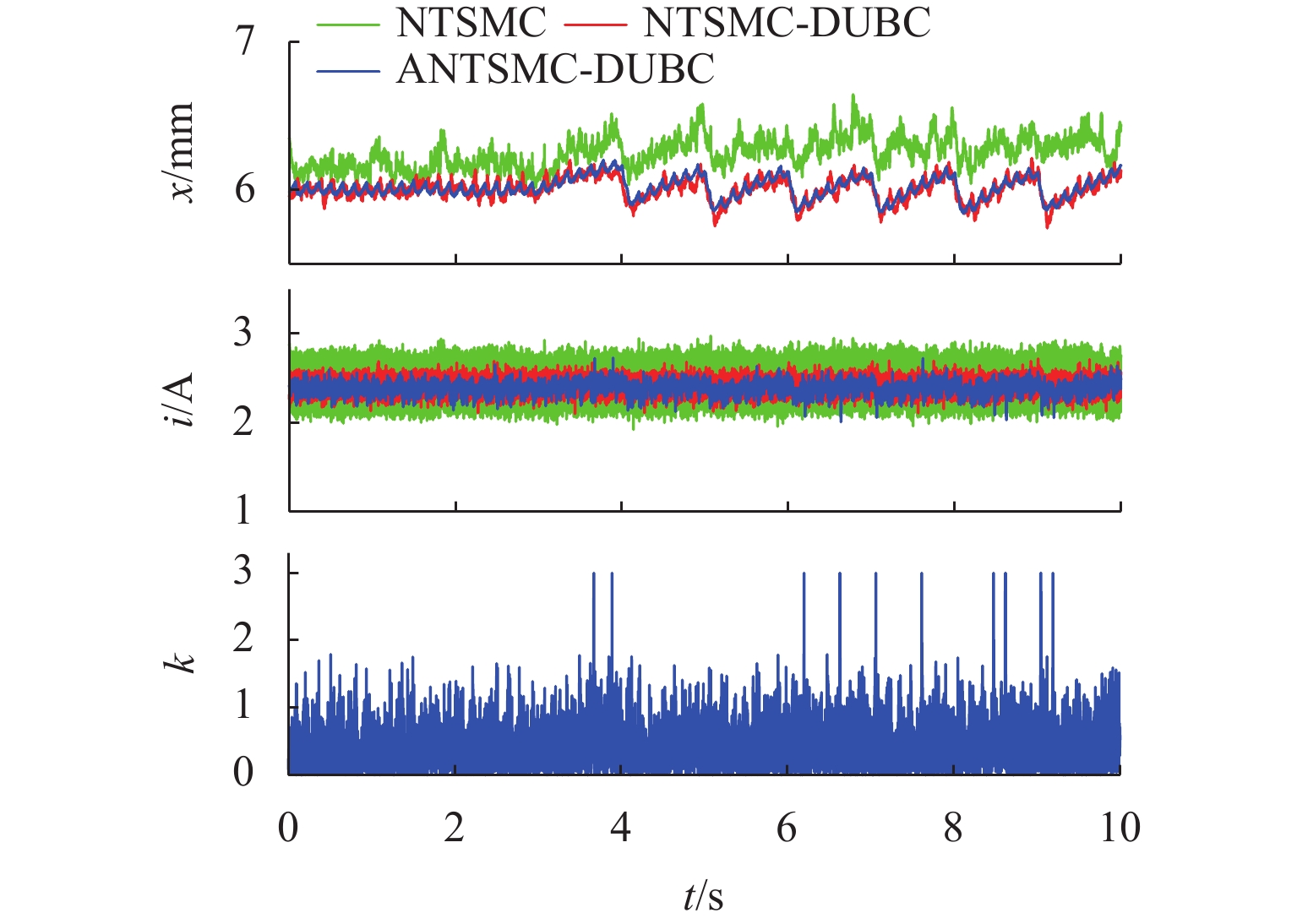
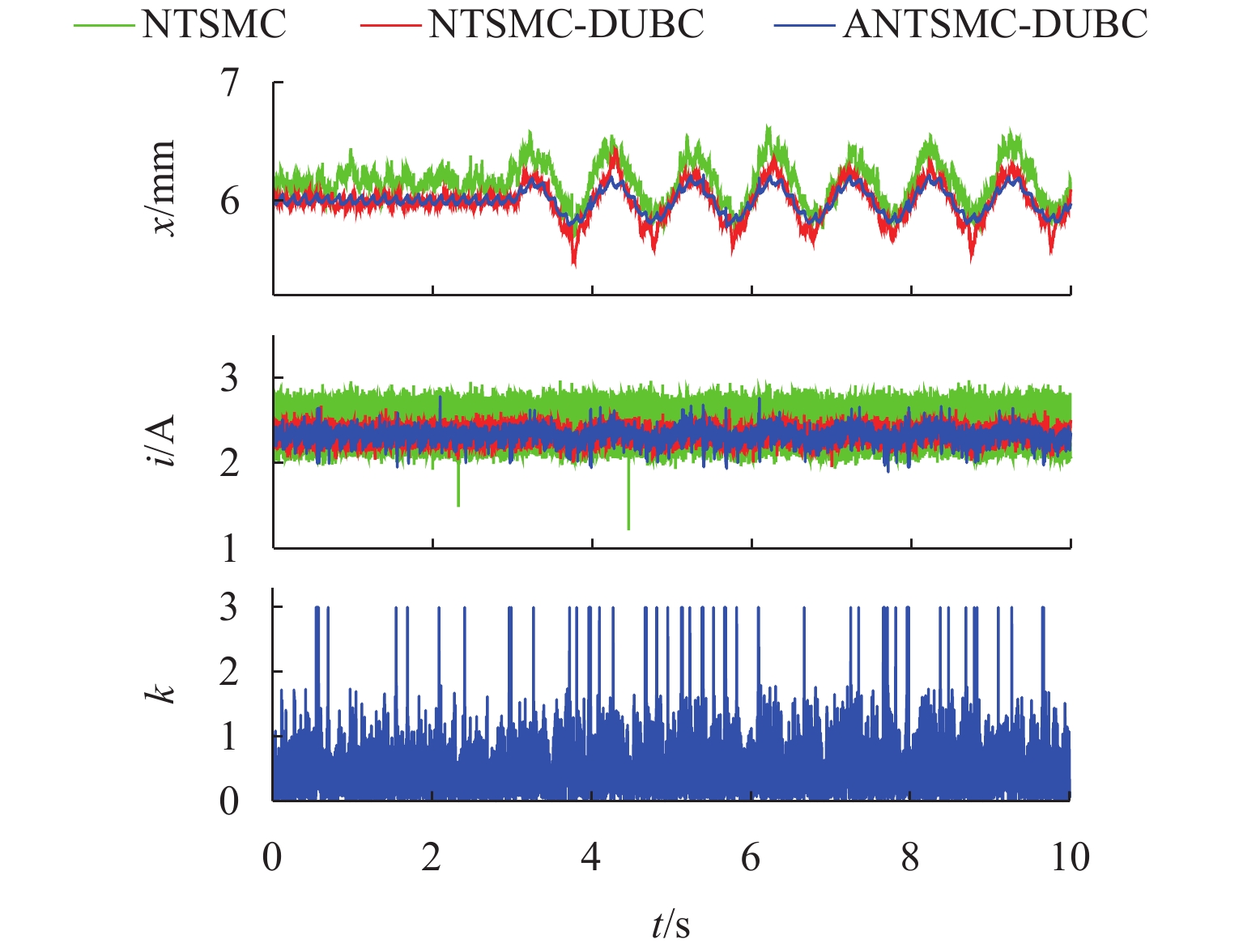
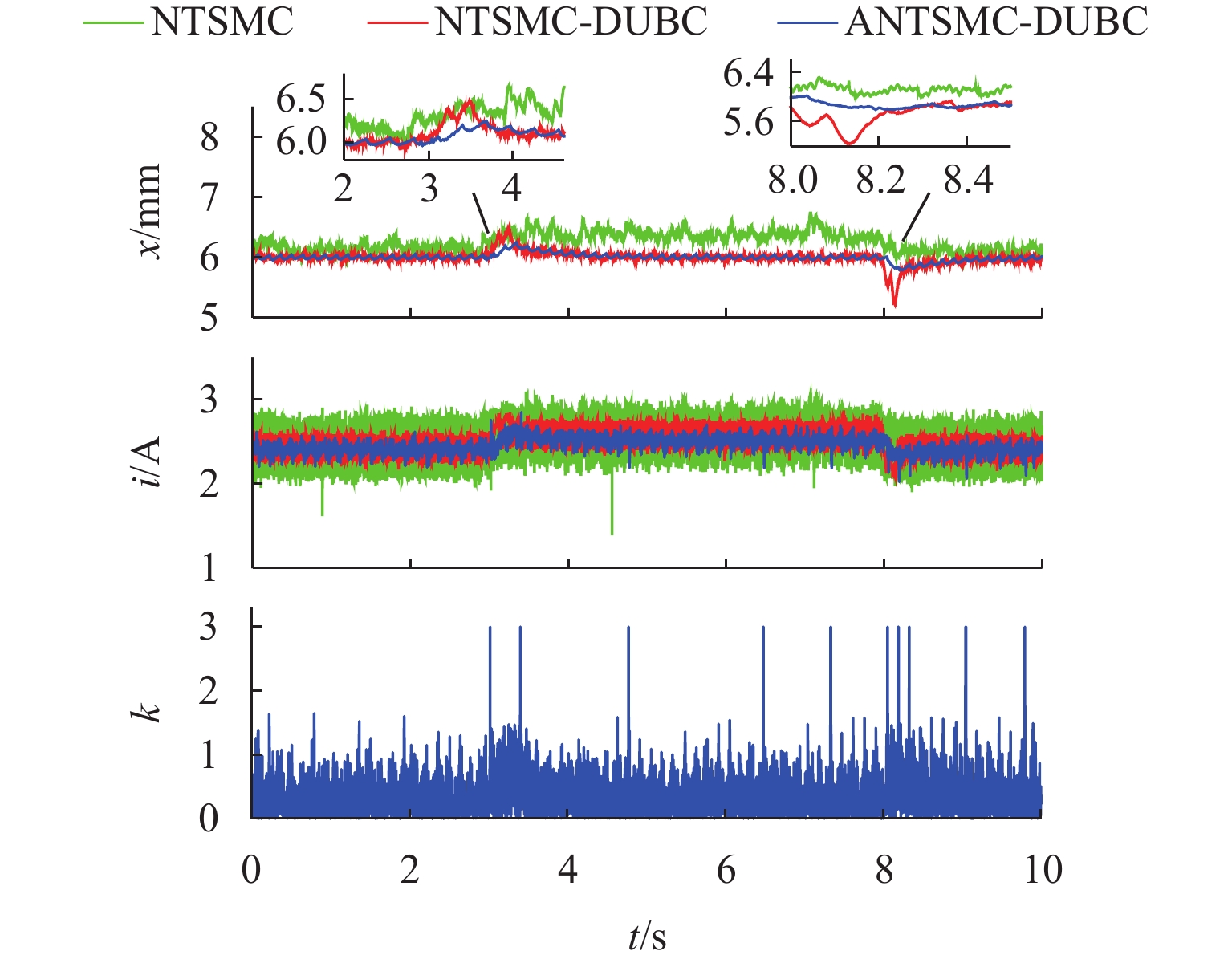
To improve the anti-disturbance capability of the electromagnetic levitation system, an adaptive nonsingular terminal sliding mode control based on disturbance upper bound compensation (ANTSMC-DUBC) was proposed. The strategy used nonsingular terminal sliding mode control based on disturbance upper bound compensation (NTSMC-DUBC) to speed up the convergence of the system state and avoid singularity. The disturbance compensation term in the reaching control law can suppress the lumped disturbance, so that a smaller switching gain can be selected to reduce chattering. A switching gain that can adaptively change with the state of the sliding mode function was designed to ensure the dynamic performance of the system while improving the steady state performance and the efficiency of disturbance compensation. The theoretical derivation proved that the designed levitation controller satisfied the Lyapunov stability criterion. The experimental results show that the proposed ANTSMC-DUBC controller exhibits good steady state and dynamic performance in signal tracking, anti-disturbance, and load variation tests, and demonstrates excellent anti-disturbance when facing internal and external disturbances in the system. Compared with that of NTSMC, the gap fluctuation of ANTSMC-DUBC is less than 0.21 mm under the equivalent external disturbance, and the system root mean square error and time-weighted absolute error are reduced by 56.26% and 57.57%, respectively. The maximum gap fluctuation is 0.22 mm with no steady state error when the 1.5 kg load variation is performed.
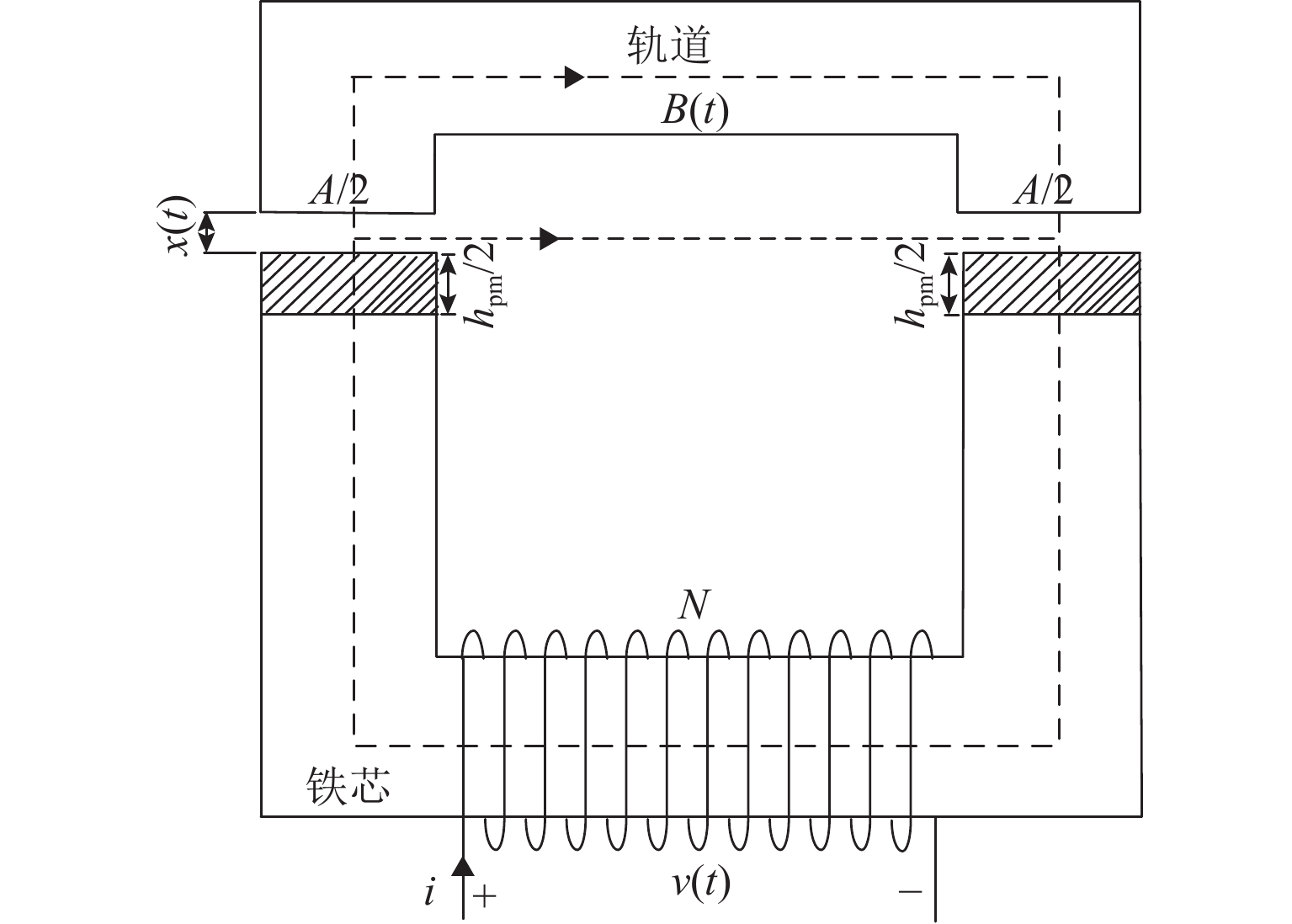
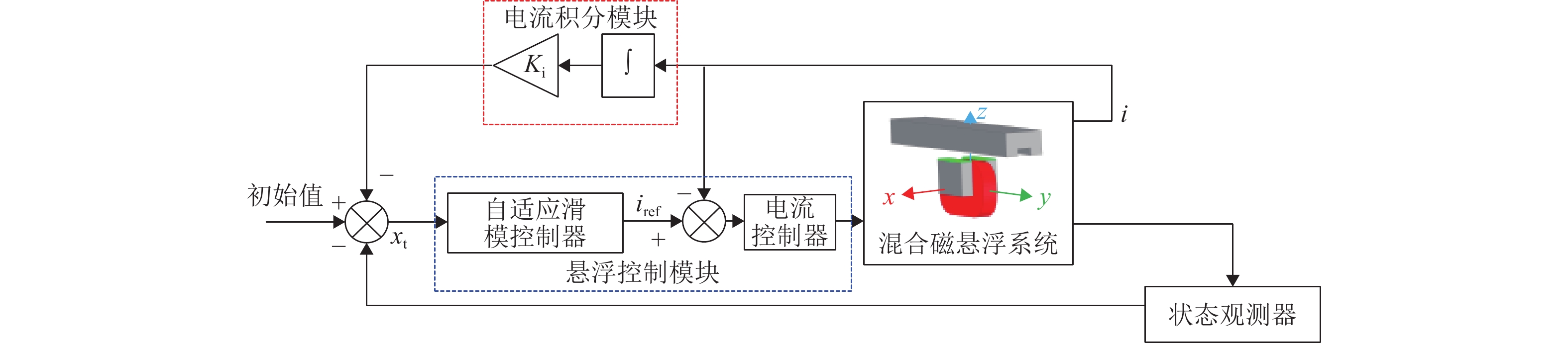
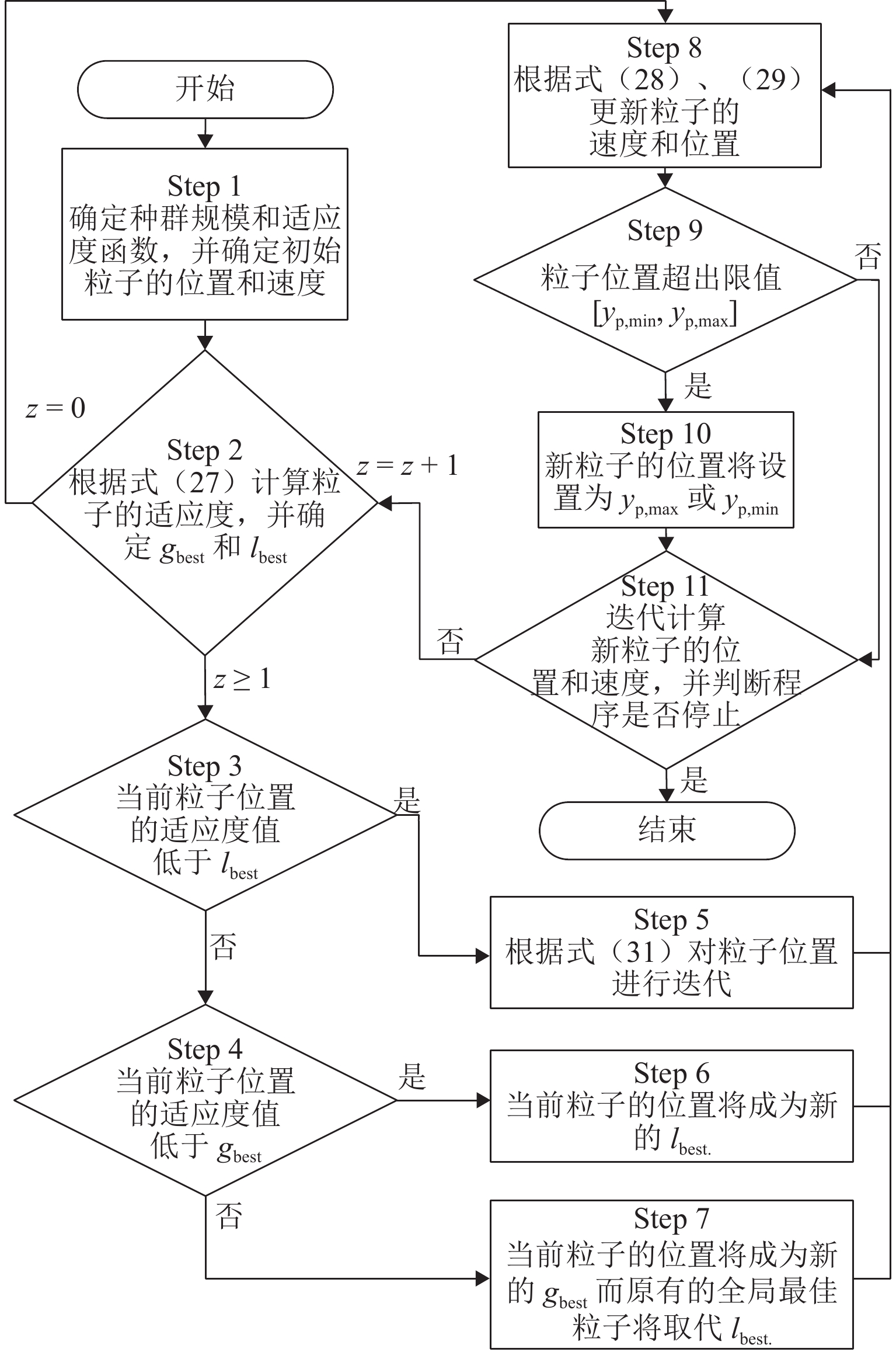
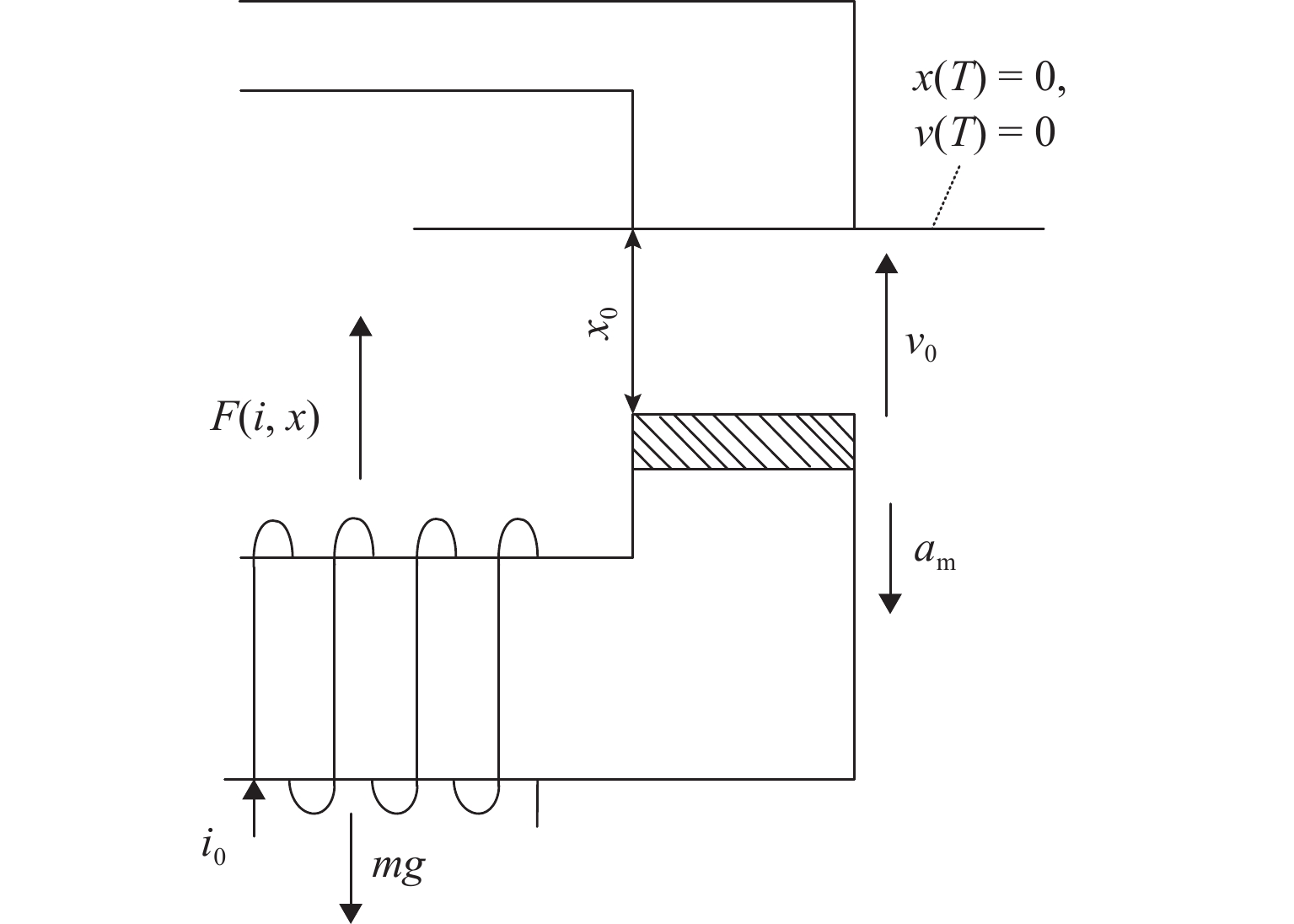
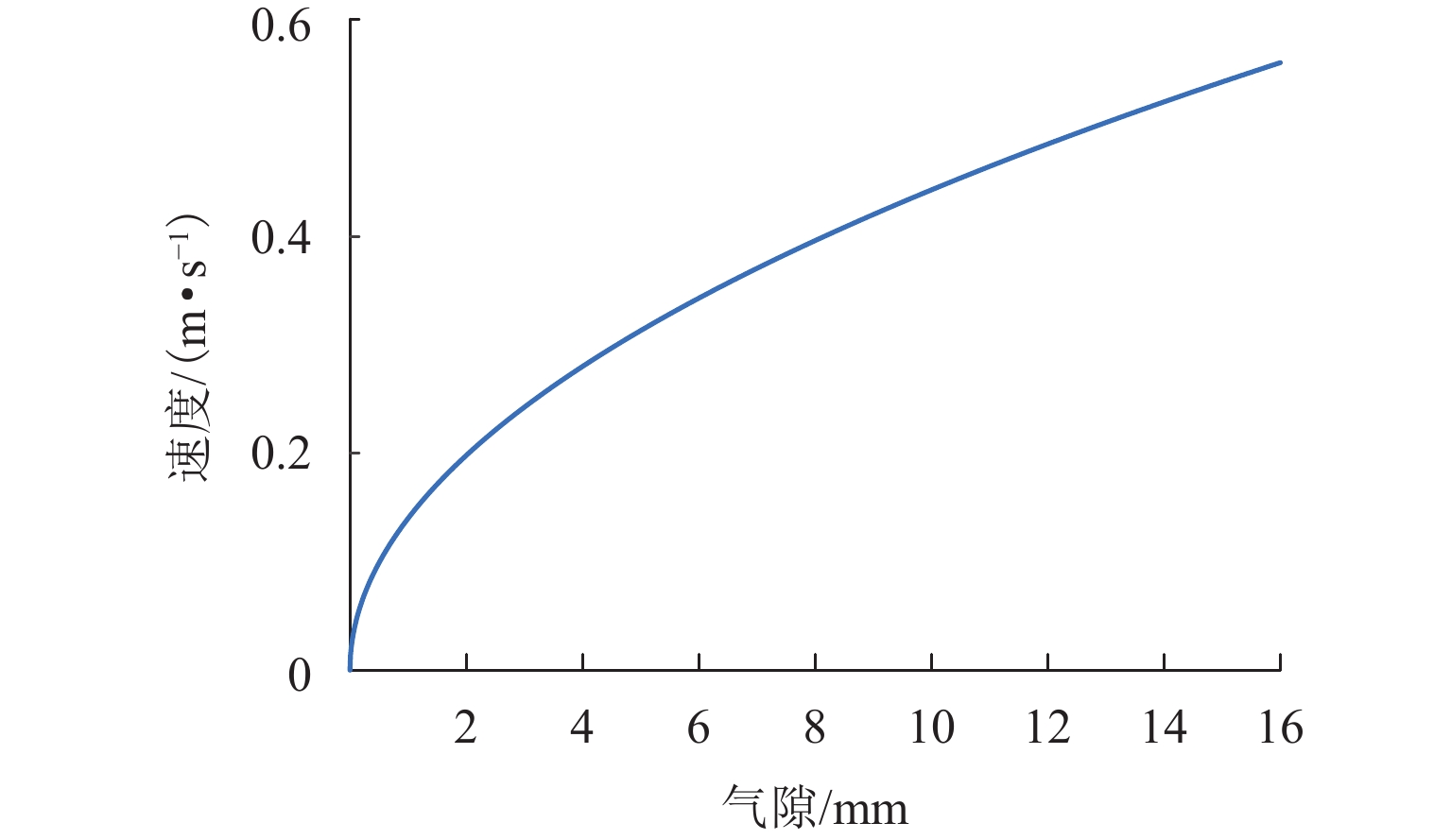
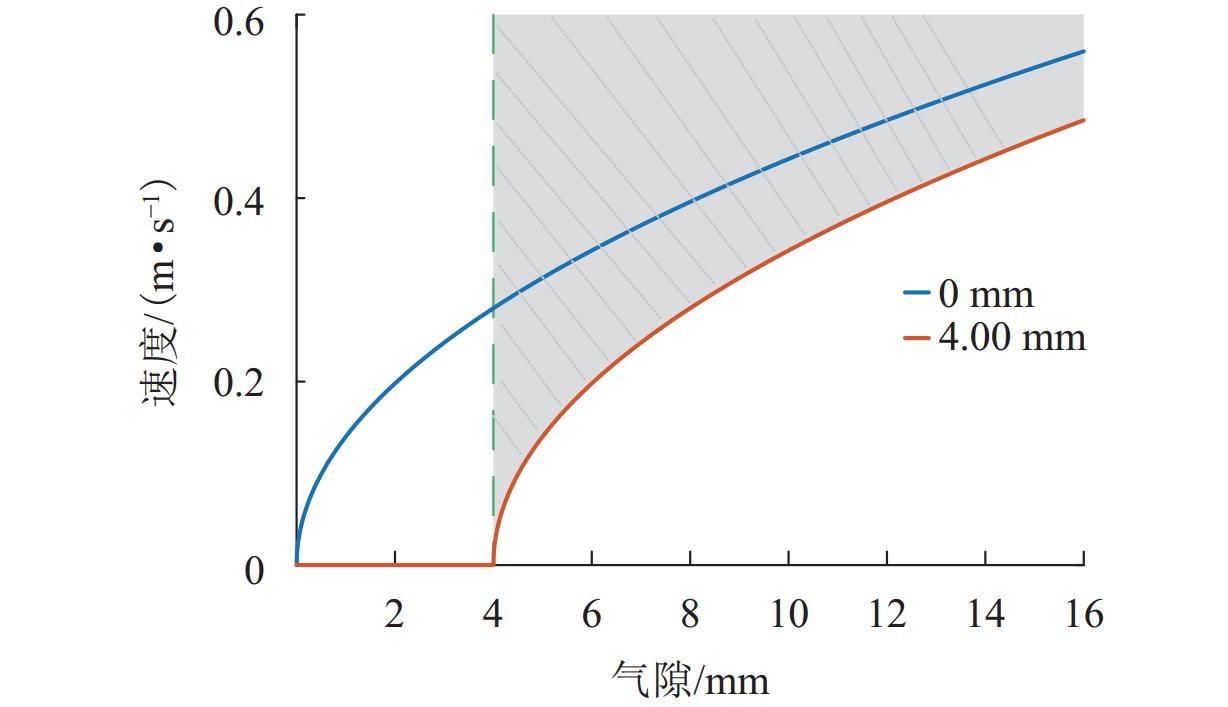
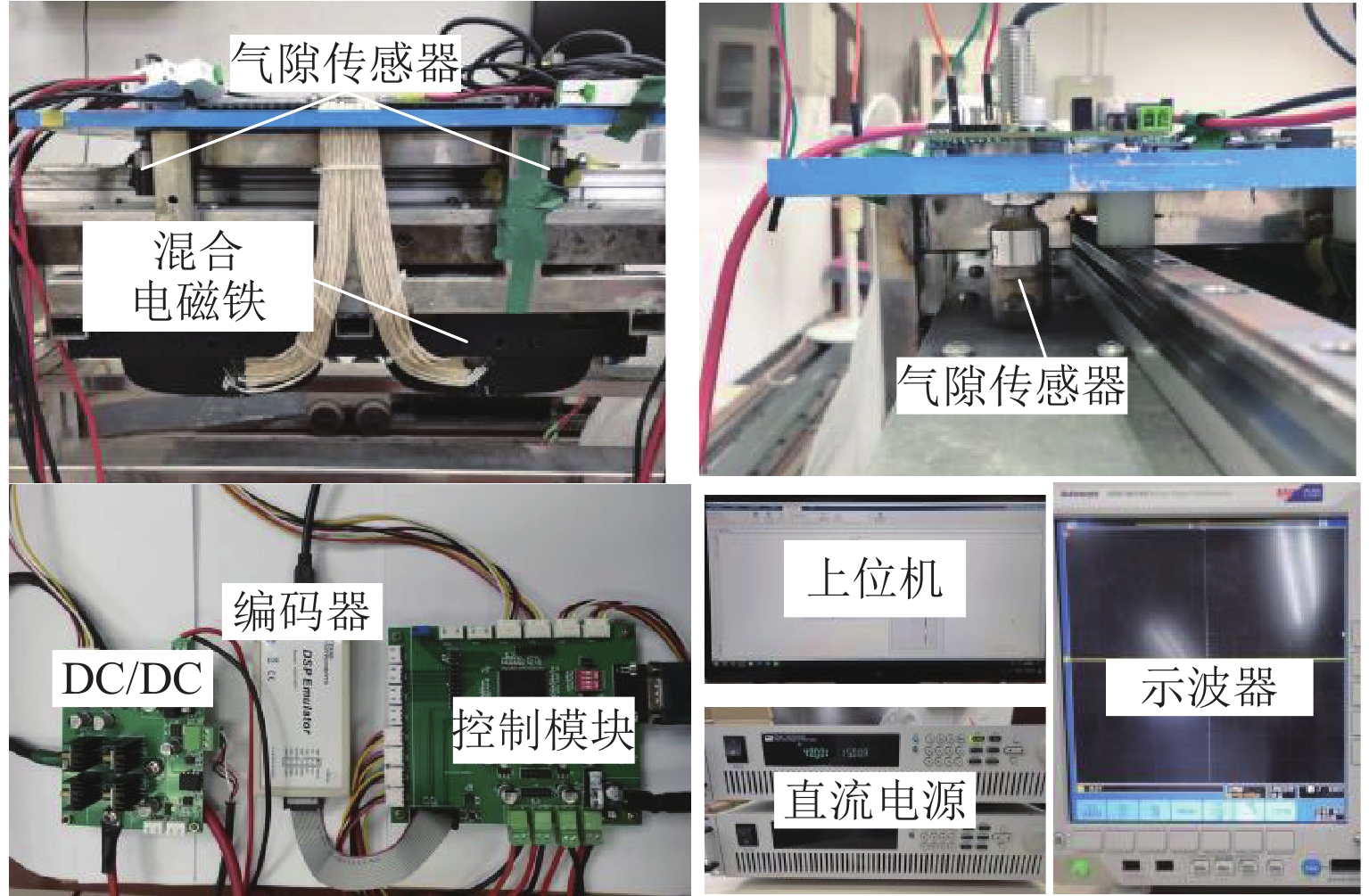
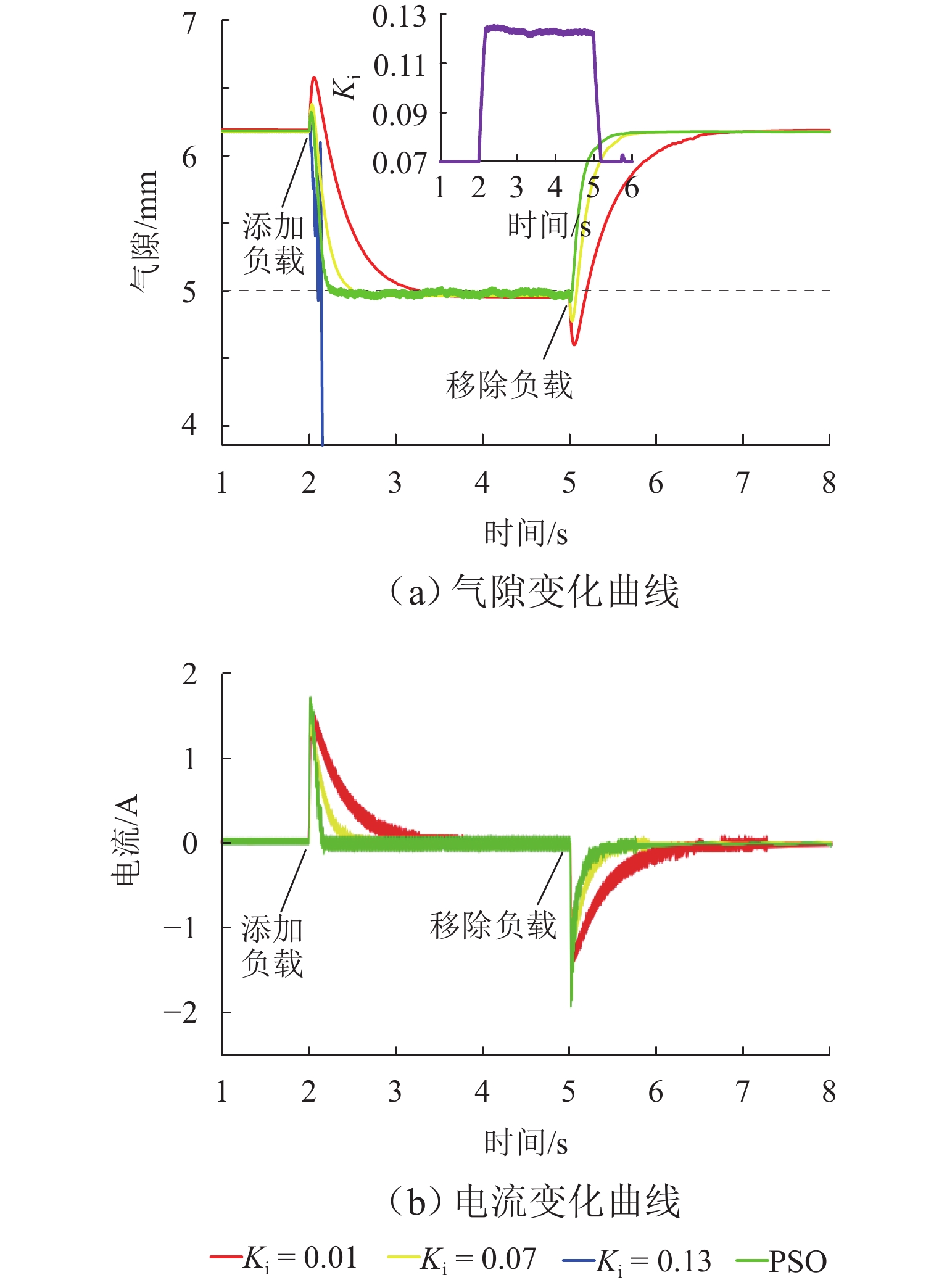
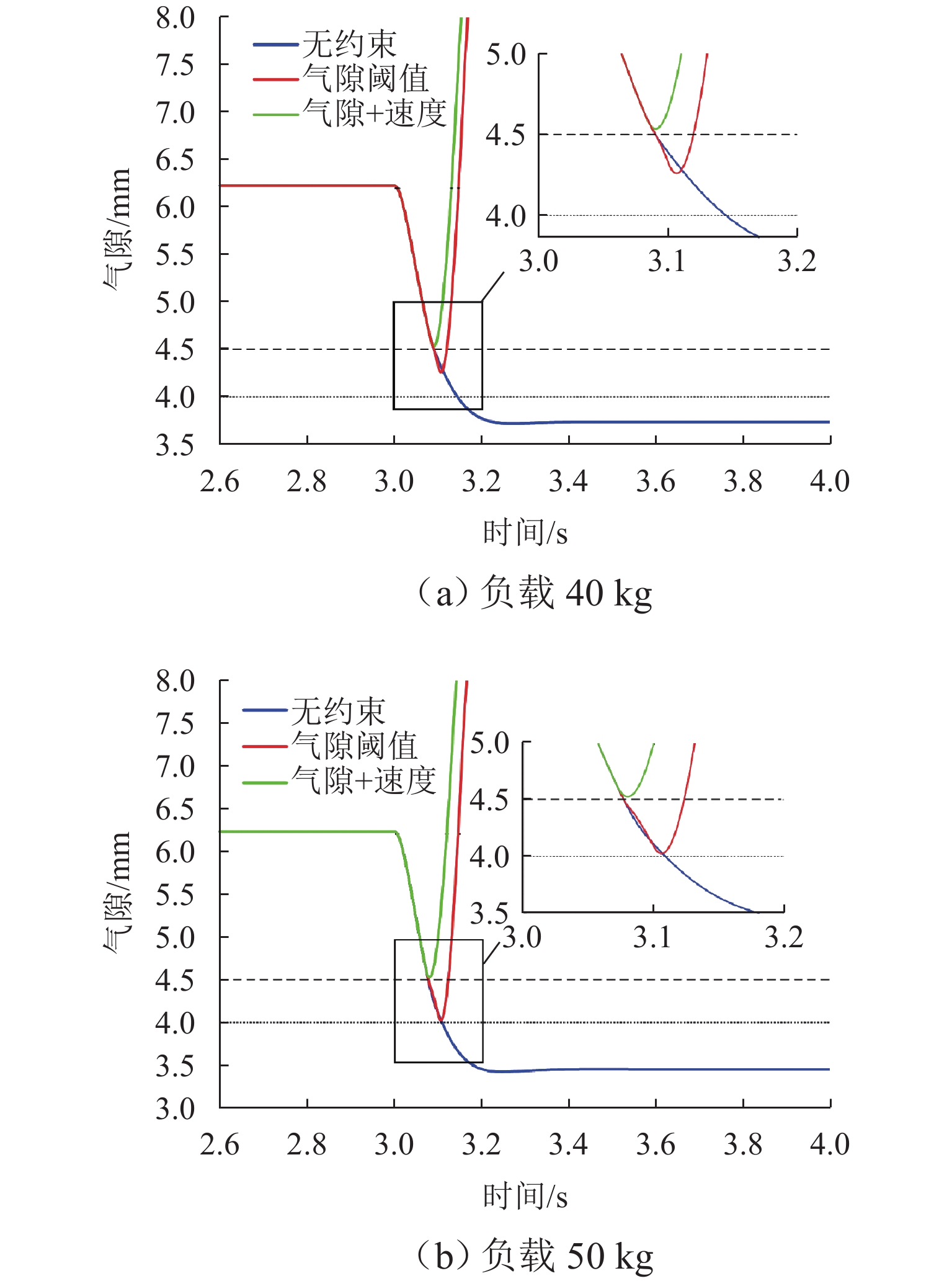
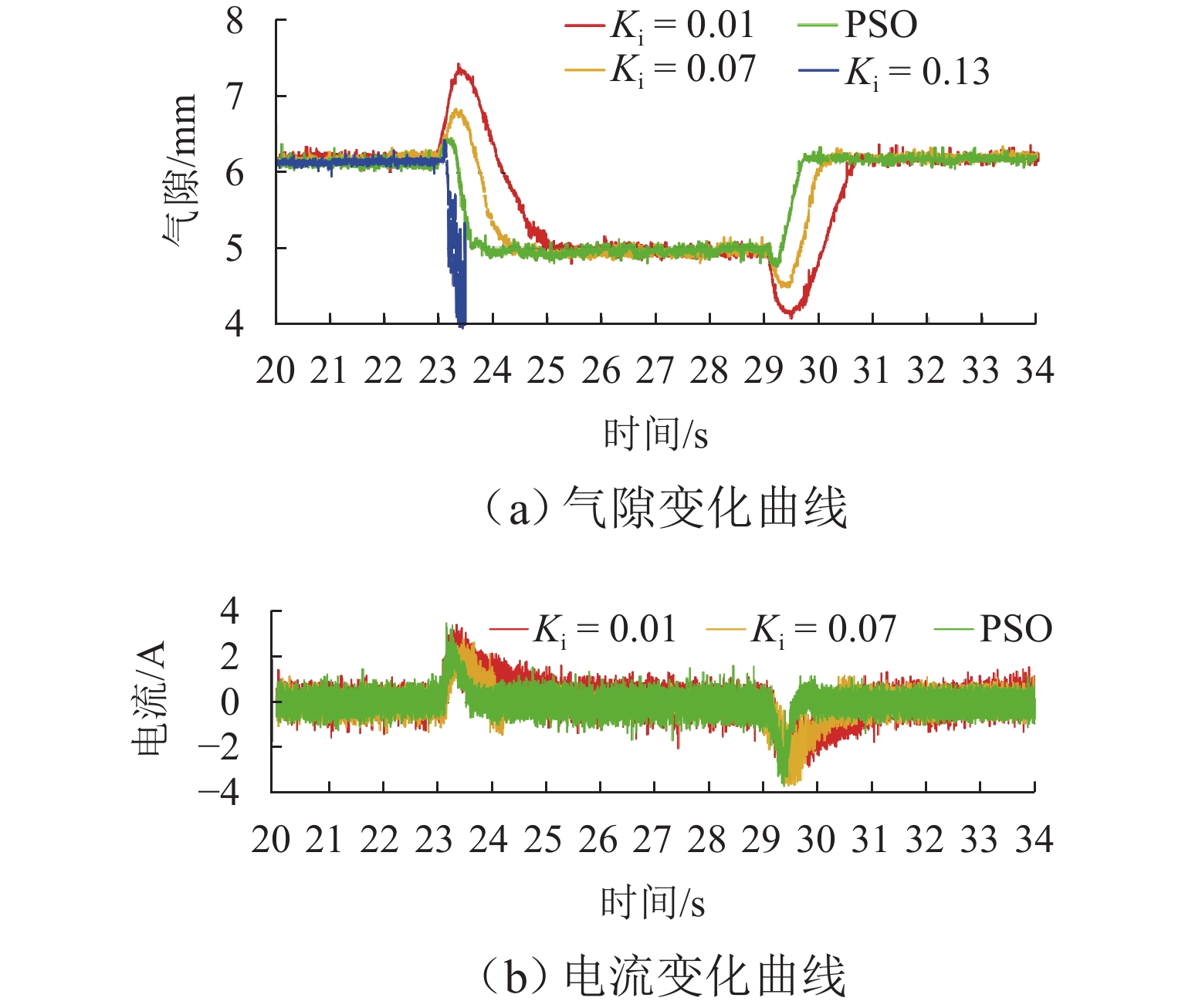
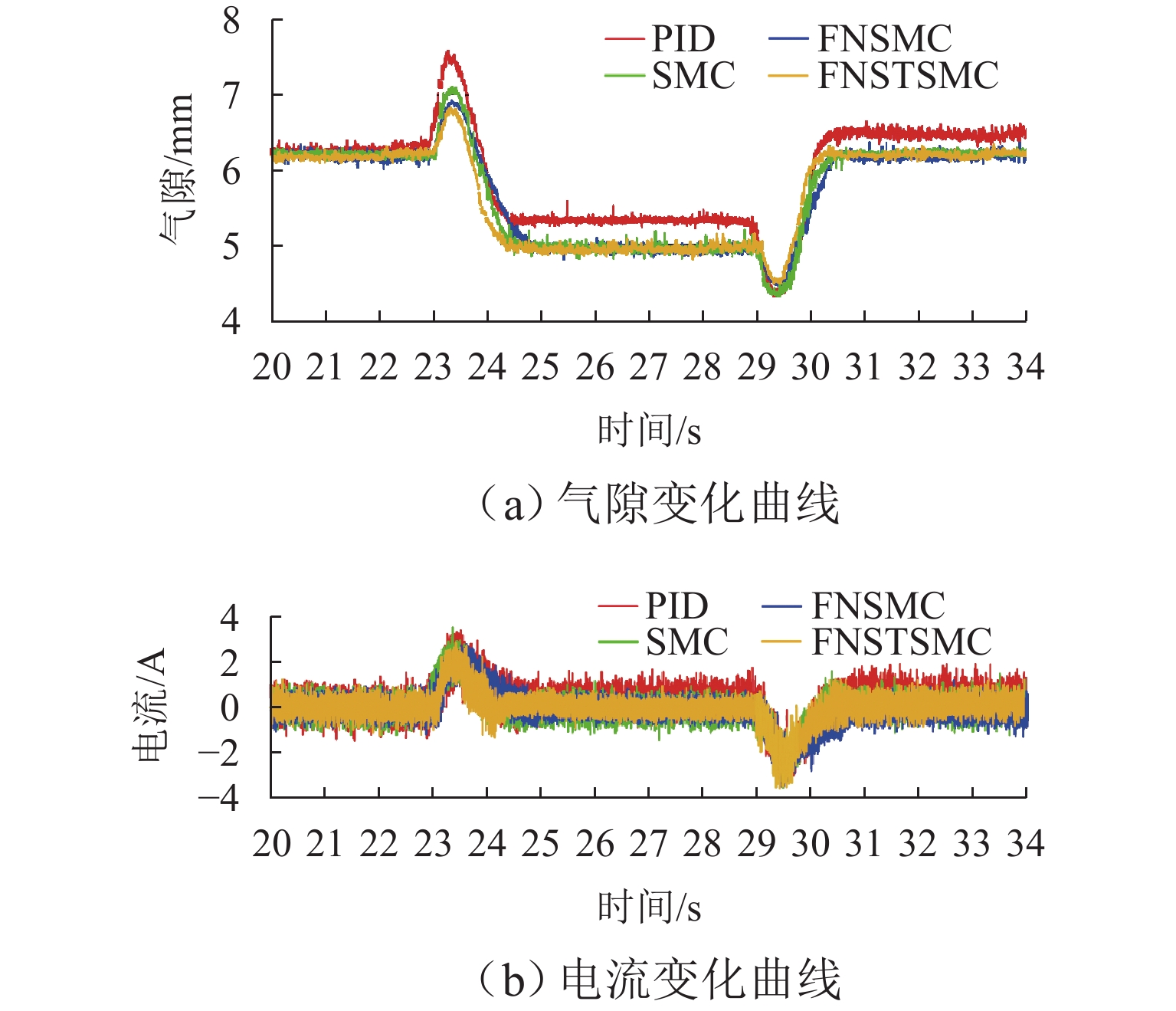
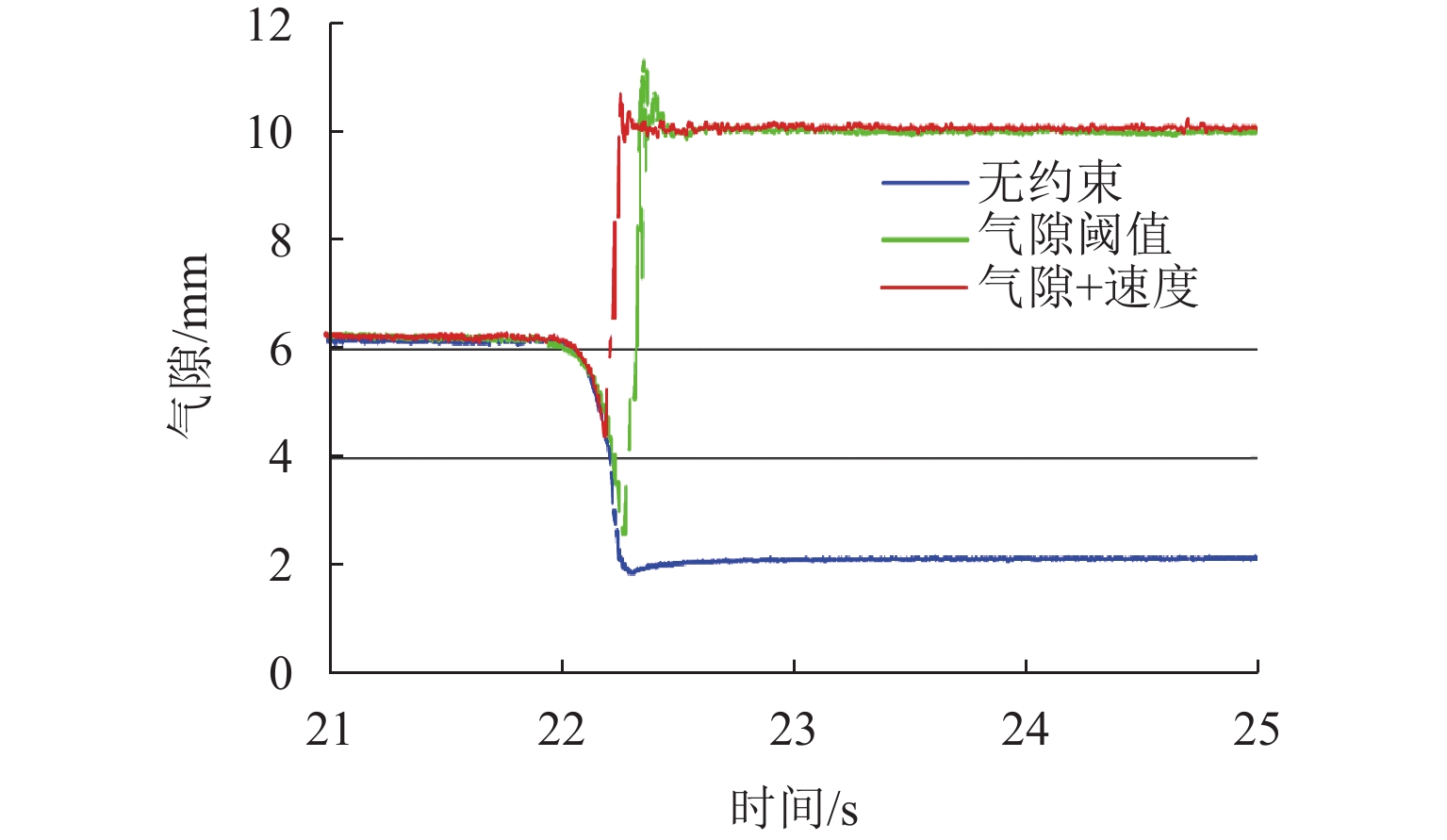
To effectively suppress the airgap overshoot and collision issues during the zero-power control process of the hybrid permanent magnet electromagnetic levitation system, an adaptive super-twisting sliding mode zero-power controller based on current integral feedback was proposed, and the particle swarm optimization (PSO) algorithm was utilized for online tuning of the current integral coefficient. First, the mathematical model of the hybrid levitation system was established, and a zero-power controller was designed based on the current integral feedback strategy. On this basis, a fast non-singular terminal (FNST) sliding mode surface was constructed to accelerate convergence, and an adaptive dual-mode switching strategy was introduced into the super-twisting sliding mode control to form the zero-power controller, realizing rapid airgap adjustment and tracking under disturbances. To address the problems caused by the fixed integral coefficient in the controller, its impact on the dynamic performance of the system was analyzed. The PSO algorithm was utilized for online optimization of the integral coefficient, enabling it to adjust in real time according to the system state, effectively suppressing airgap overshoot, improving convergence speed, and thereby enhancing the overall control performance. Furthermore, to reduce the risk of track collision during the zero-power control process, airgap velocity information was introduced based on the traditional airgap threshold strategy to construct a “velocity + size” dual criterion, enhancing the collision prediction capability in the vertical direction. Simulation and experimental results indicate that the proposed strategy significantly reduces airgap overshoot and accelerates the convergence process. The overshoot is less than 0.30 mm, and the convergence time is shortened to 0.67 s; compared with the traditional threshold method, the proposed dual criterion advances the decision time by approximately 0.10 s, reduces the airgap overshoot by 1.70 mm, and can more effectively predict and prevent the occurrence of collisions.
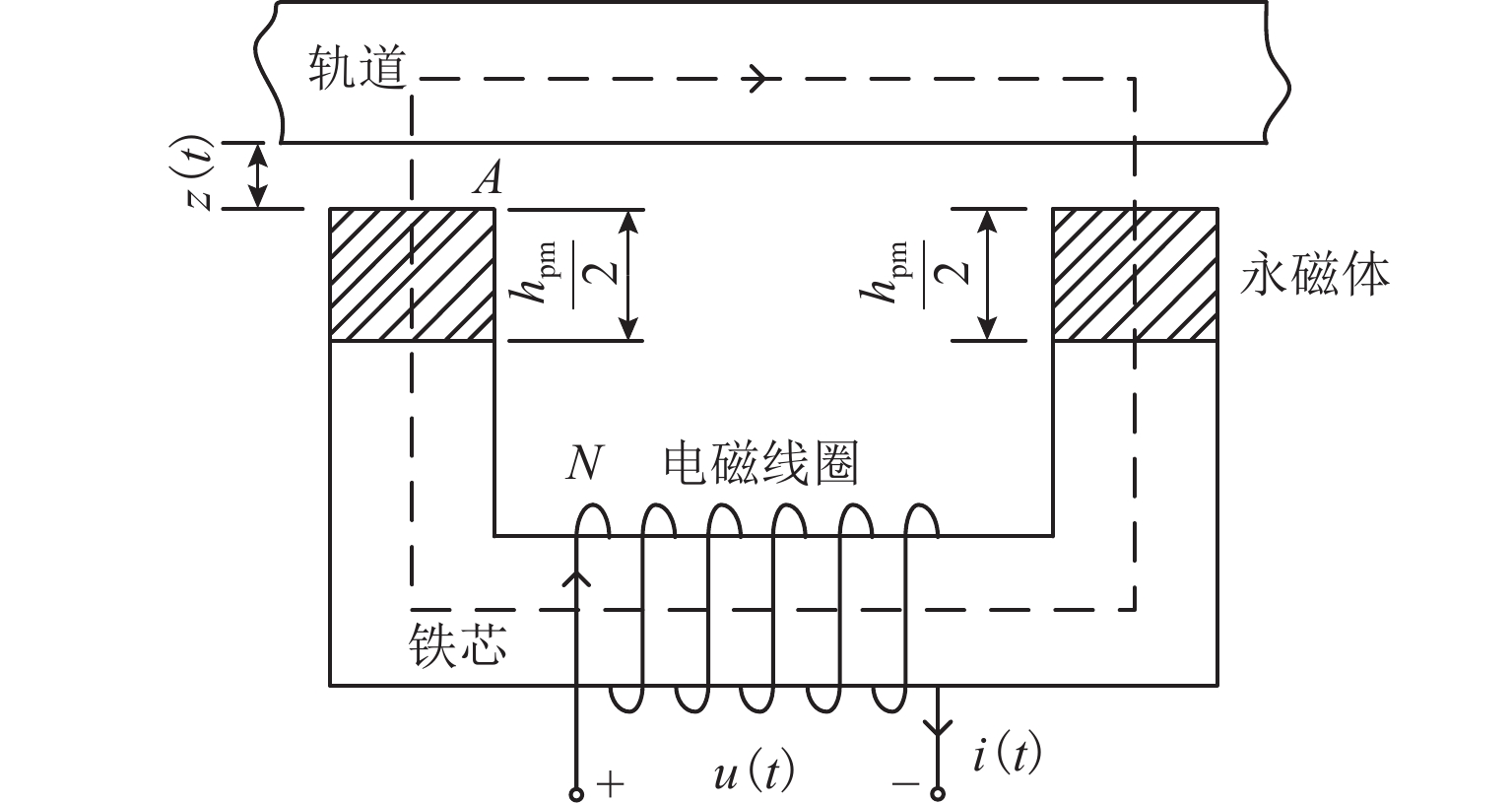
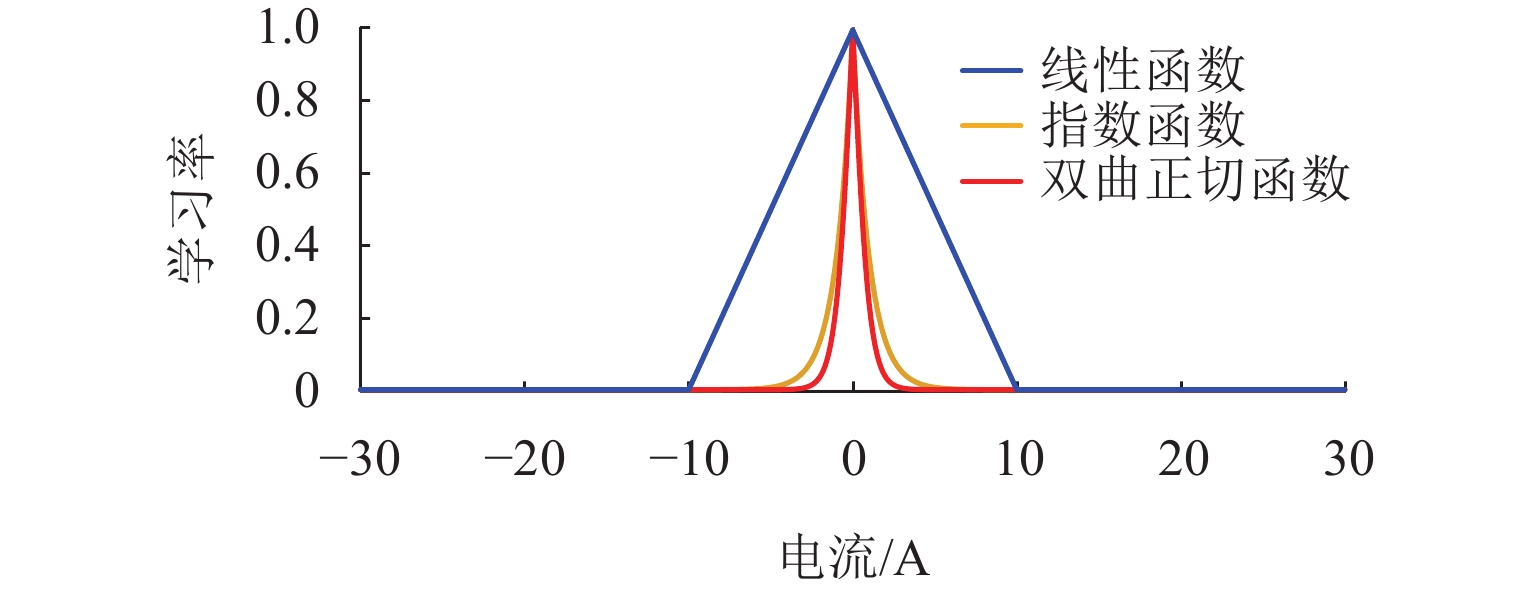
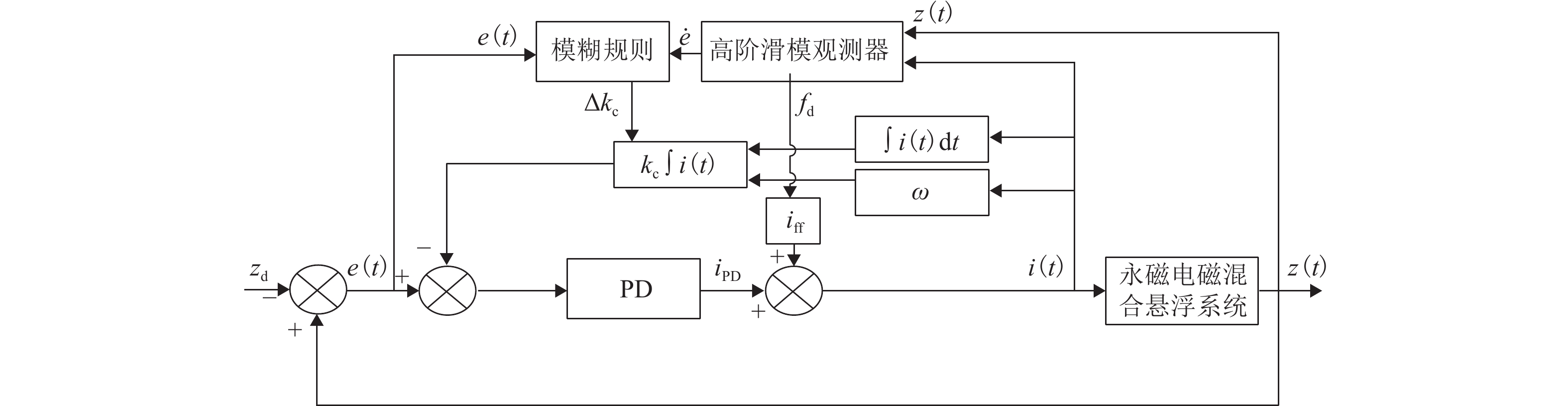
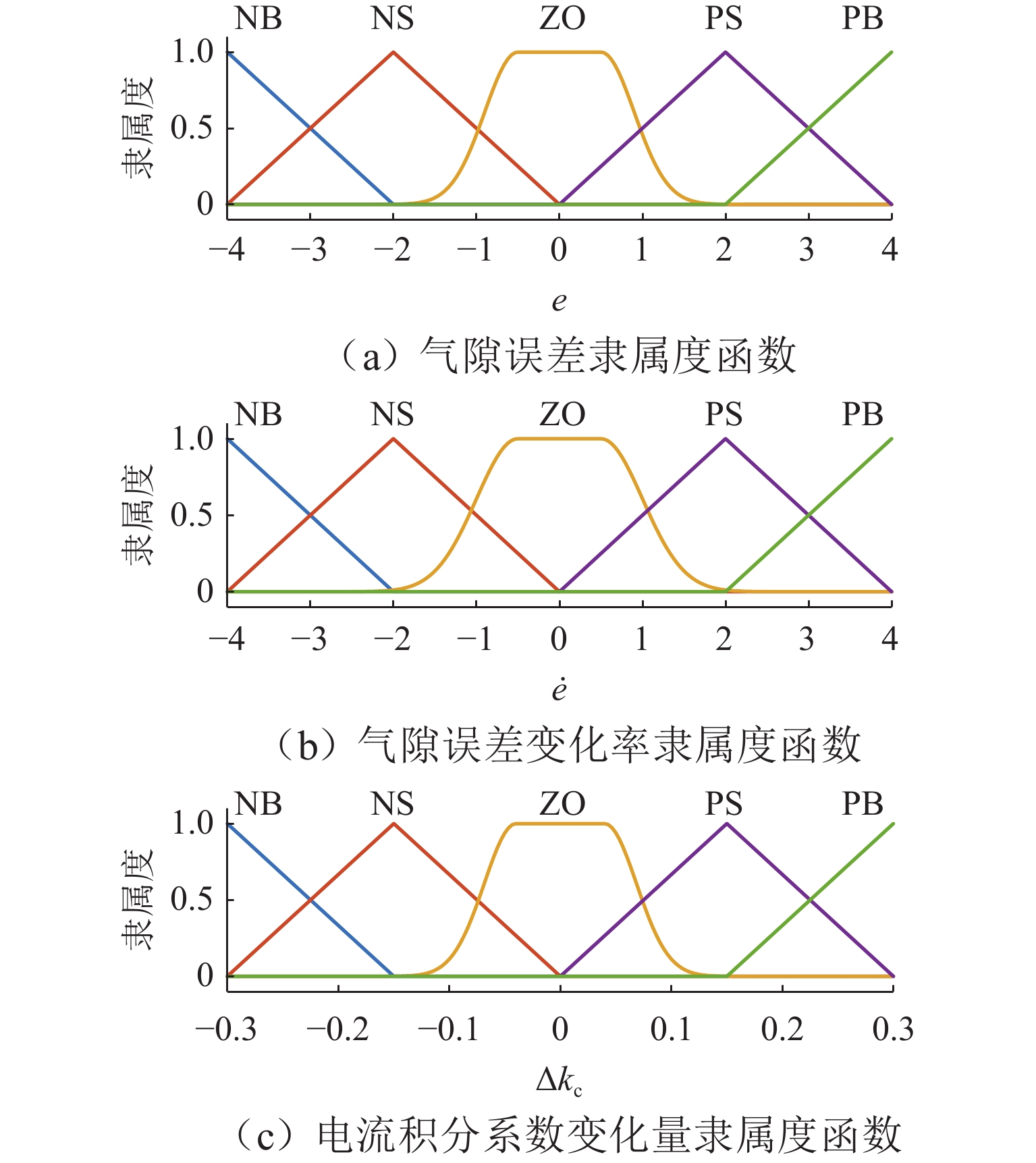
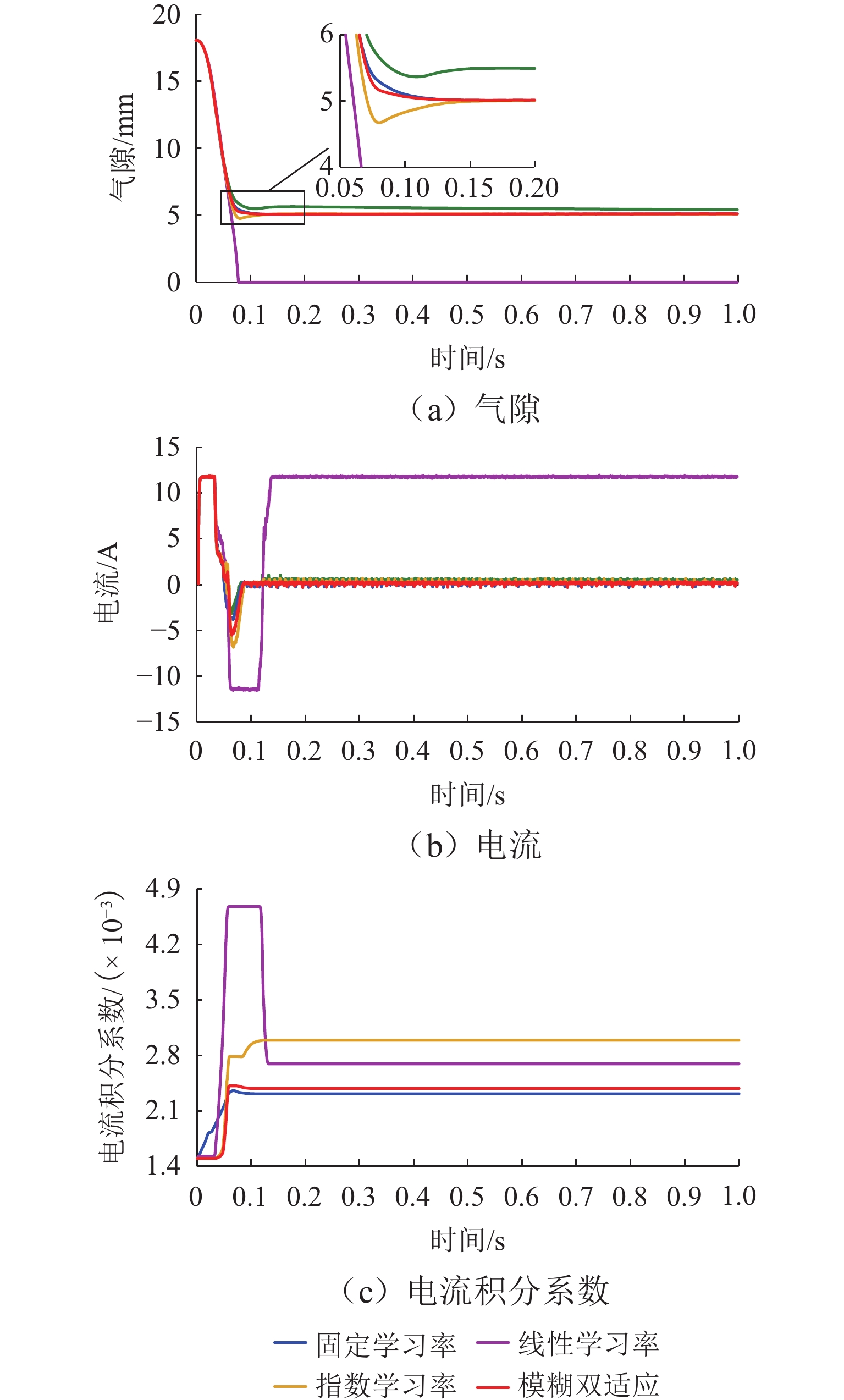
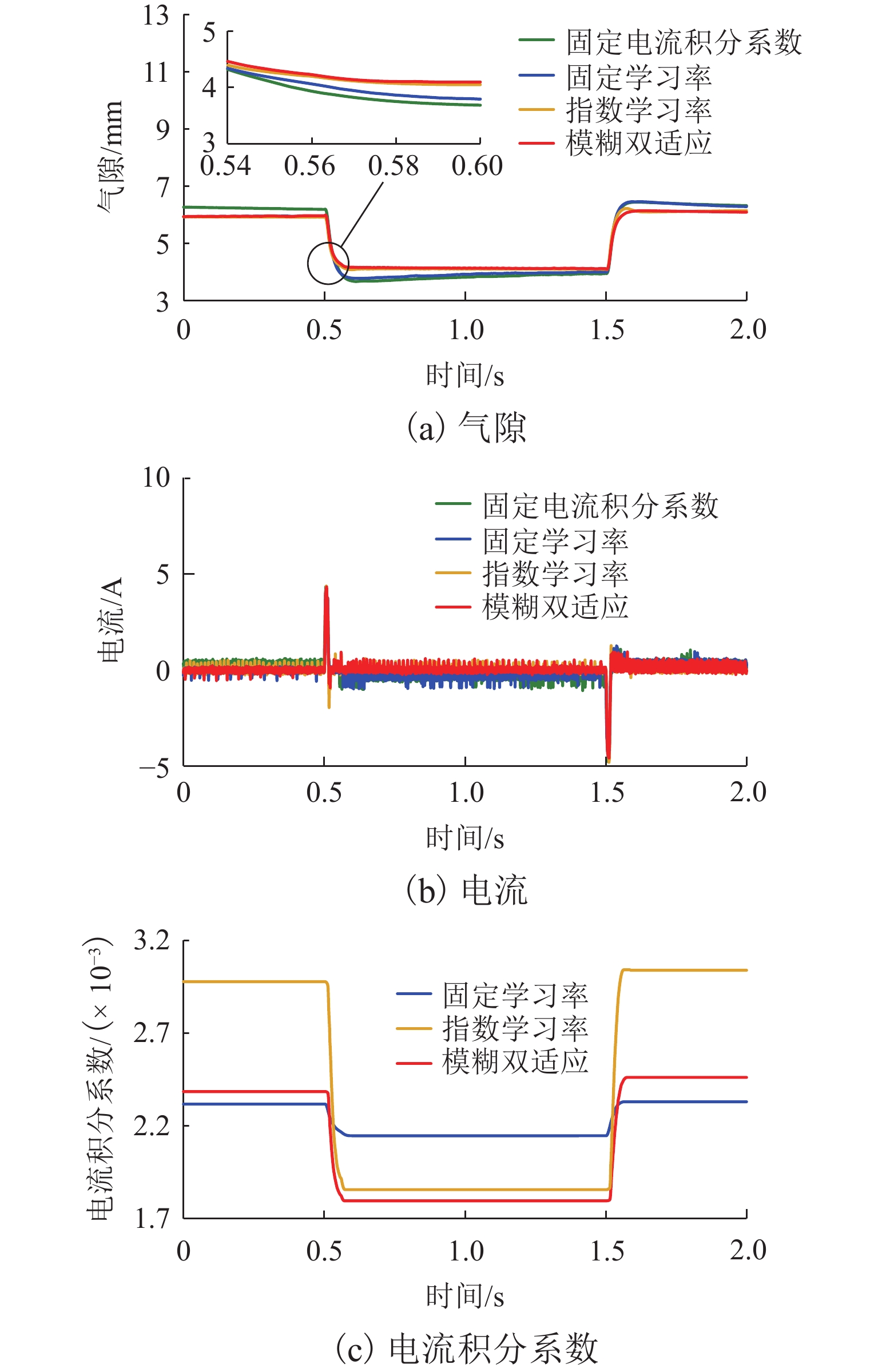
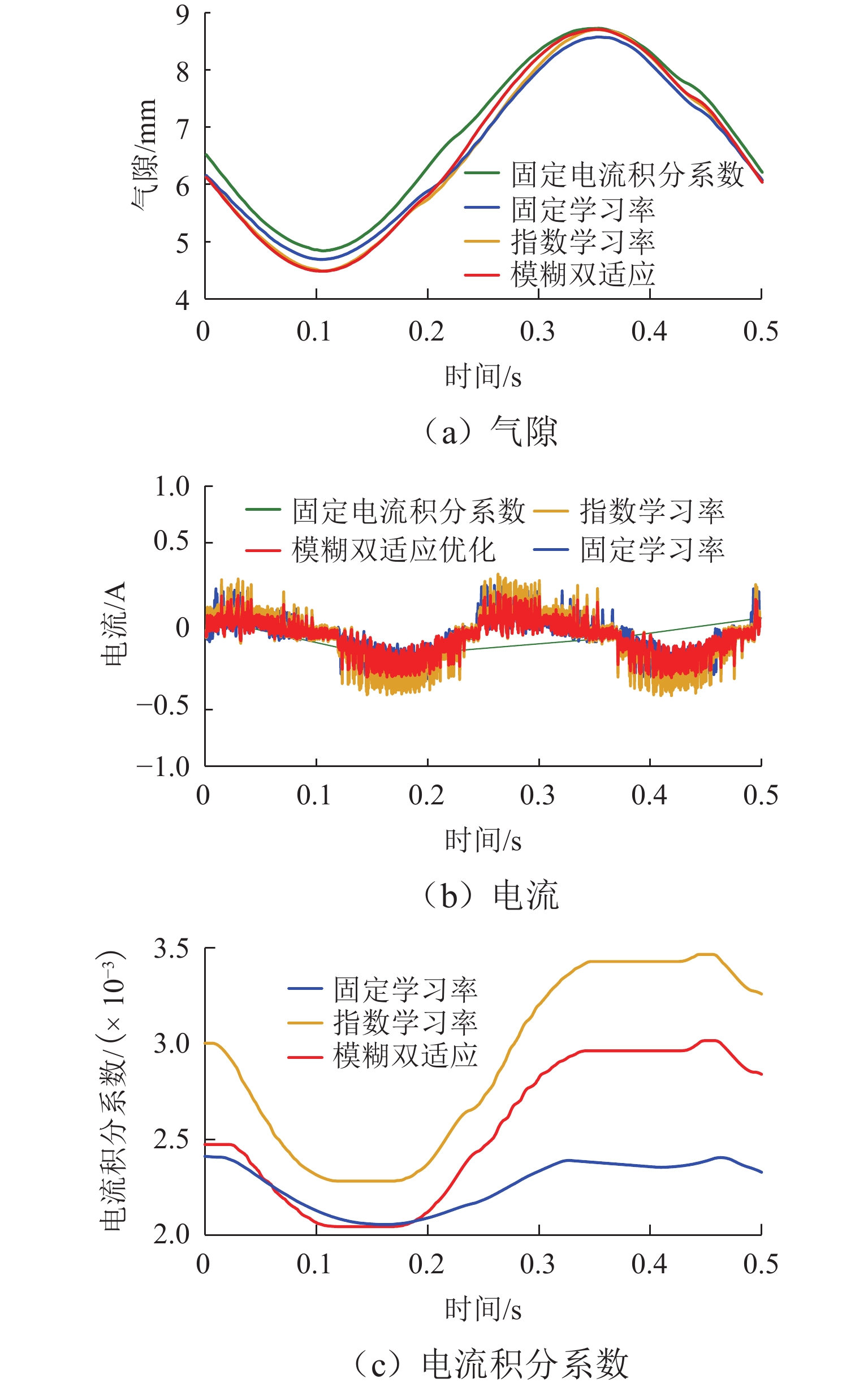
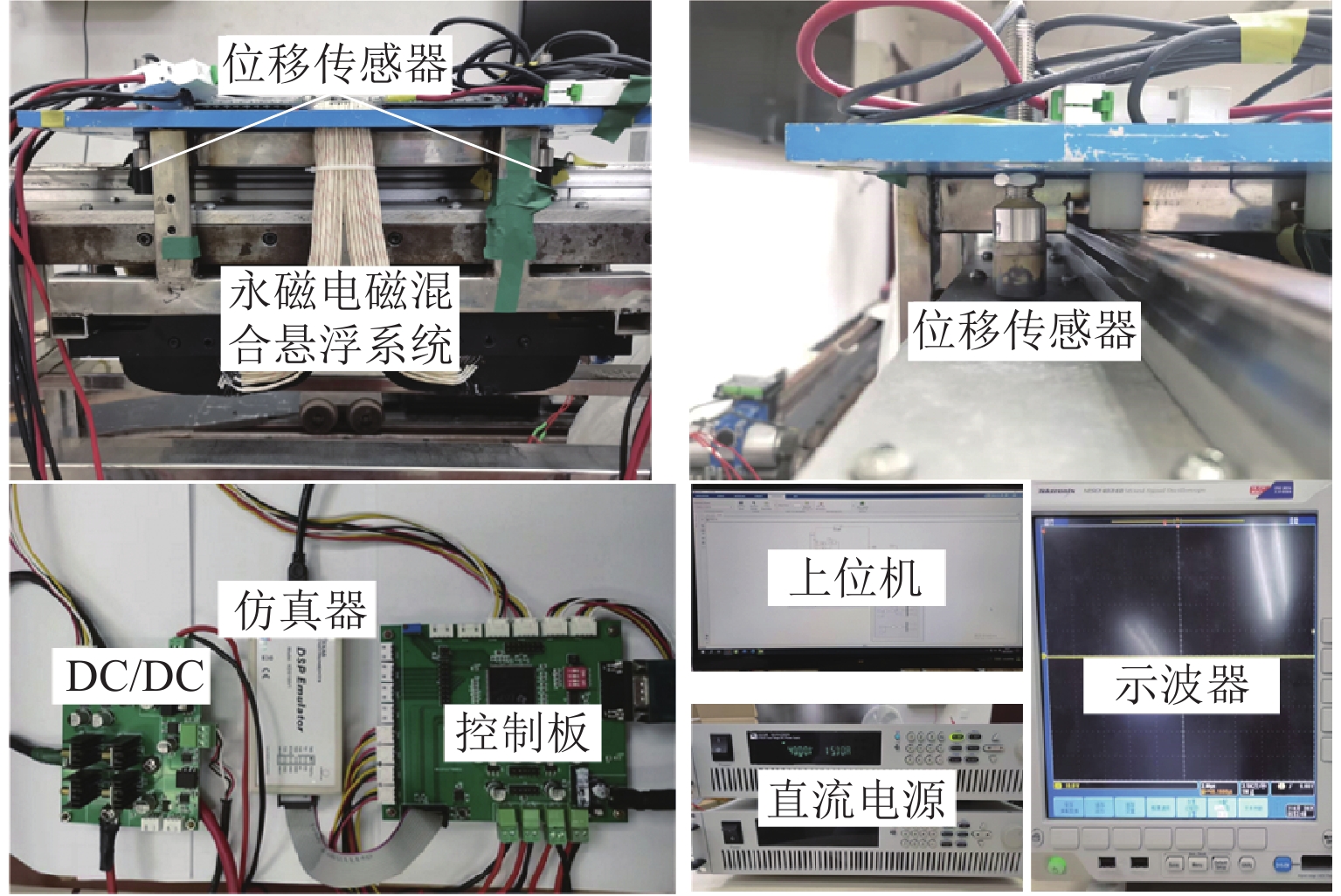
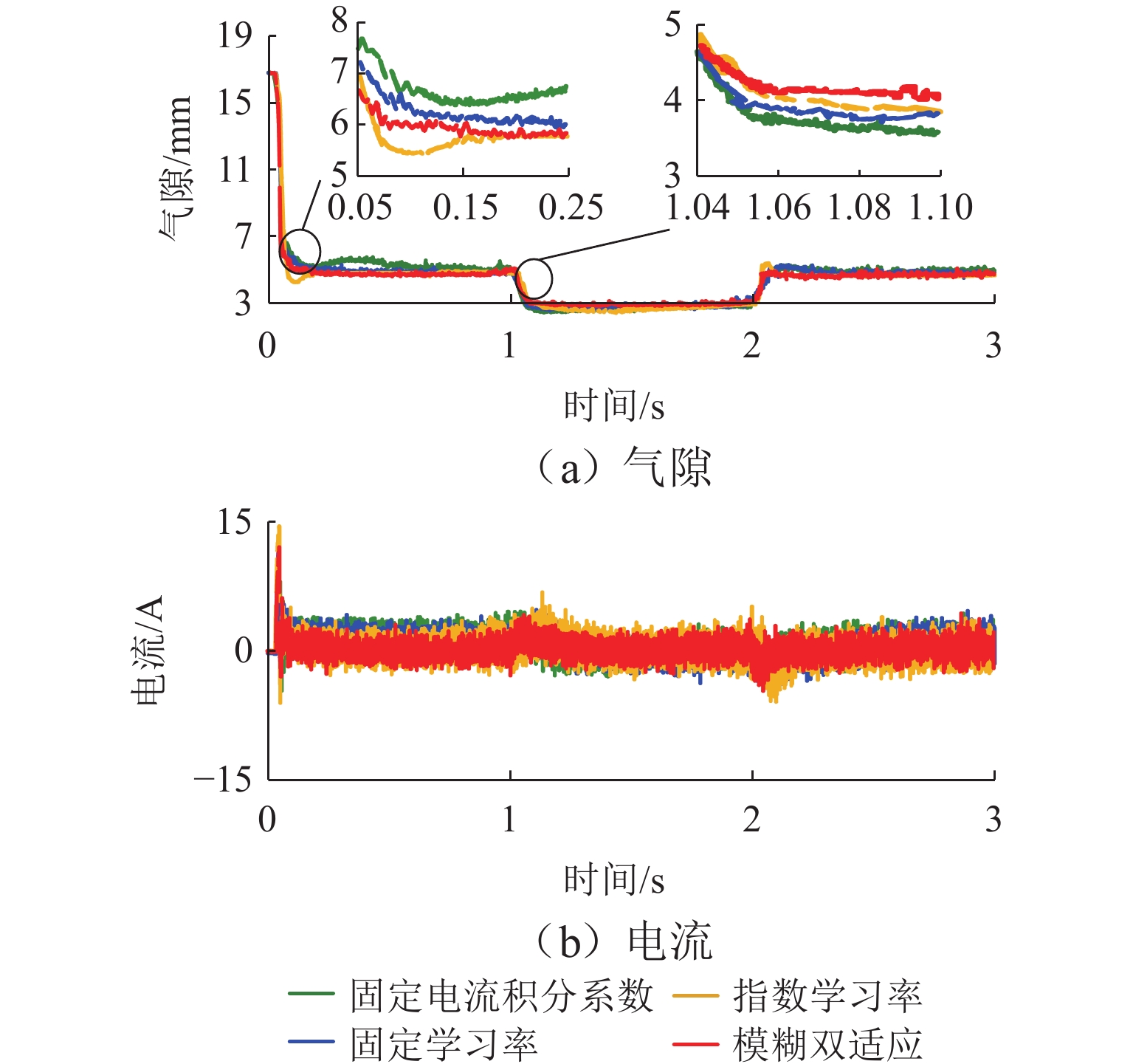
A fuzzy dual-adaptive zero-power control method based on a high-order sliding mode observer was proposed to address issues of saturation, response lag, and insufficient disturbance rejection caused by current integration in the zero-power control of permanent magnet electromagnetic hybrid suspension systems. The method comprehensively considered both no-load lifting and load variation operating conditions. First, based on the system mathematical model, a high-order sliding mode observer was designed to estimate the lumped disturbance and error variation rate. Second, feedforward compensation was introduced into the proportional derivative (PD) controller according to the observer output, achieving fast and stable tracking of the suspension gap and dynamic compensation of disturbance forces. Further analysis was conducted on the impact of current integration on dynamic and steady-state performance under both no-load lifting and load variation conditions. Finally, a fuzzy dual-adaptive algorithm was proposed. A two-dimensional fuzzy algorithm was used to optimize the integral coefficient of the current loop online, while the learning rate was dynamically adjusted based on a hyperbolic tangent function, enabling adaptive adjustment of the integral gain weight according to the system dynamics. This effectively suppressed integral saturation and improved system response speed. The research results show that under no-load lifting conditions, the simulation and experimental response time of the proposed method is 0.12 s and 0.25 s, respectively, with no overshoot. Under sudden load variation conditions, the simulation and experimental response time is 0.10 s and 0.15 s, without overshoot. Under continuous load variation conditions, the current error does not exceed ±0.35 A, and no overshoot occurs. Compared with methods using fixed learning rates and fixed current integral coefficients, the proposed method reduces response time by at least 14.2% with zero overshoot.
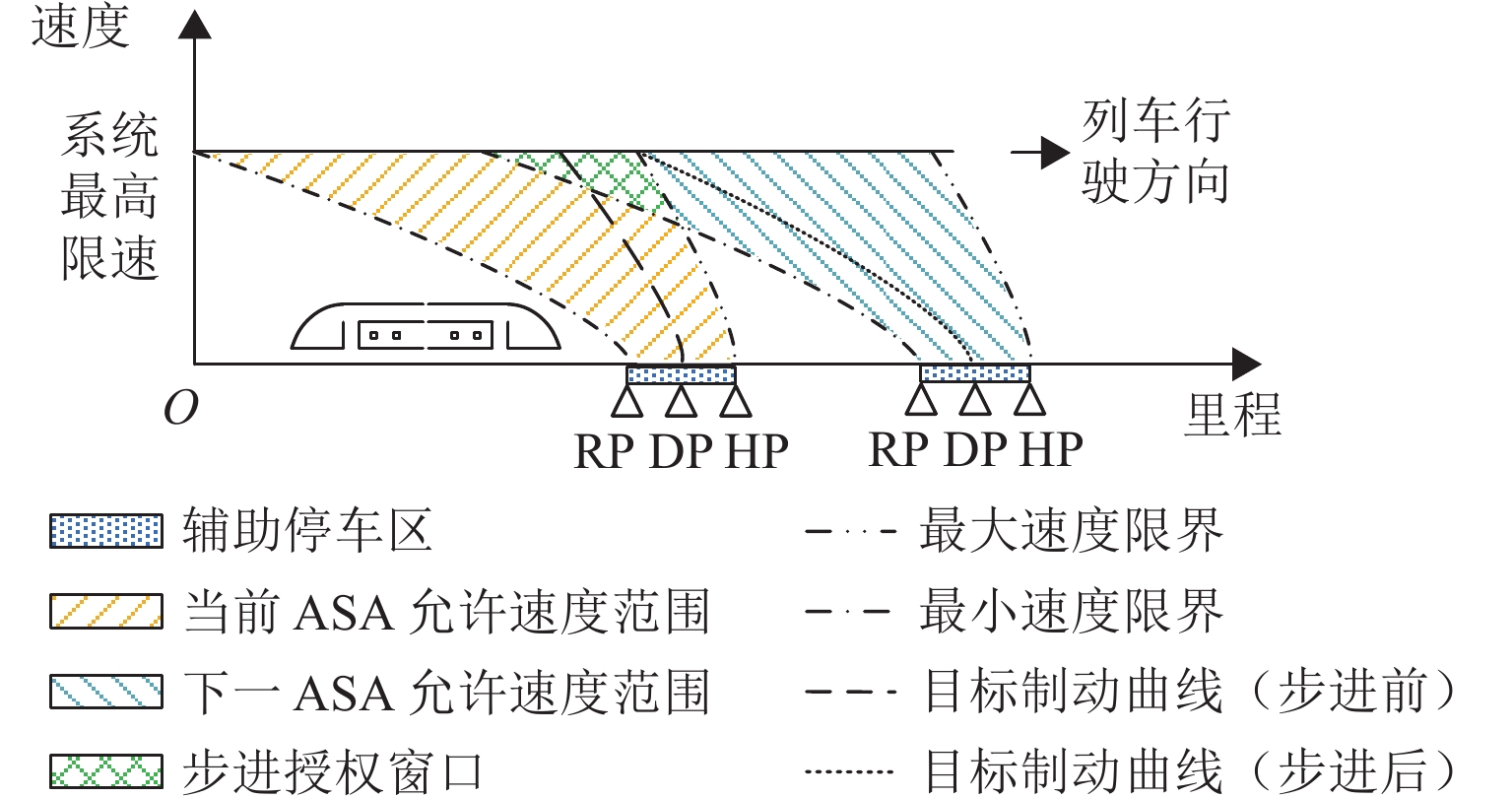
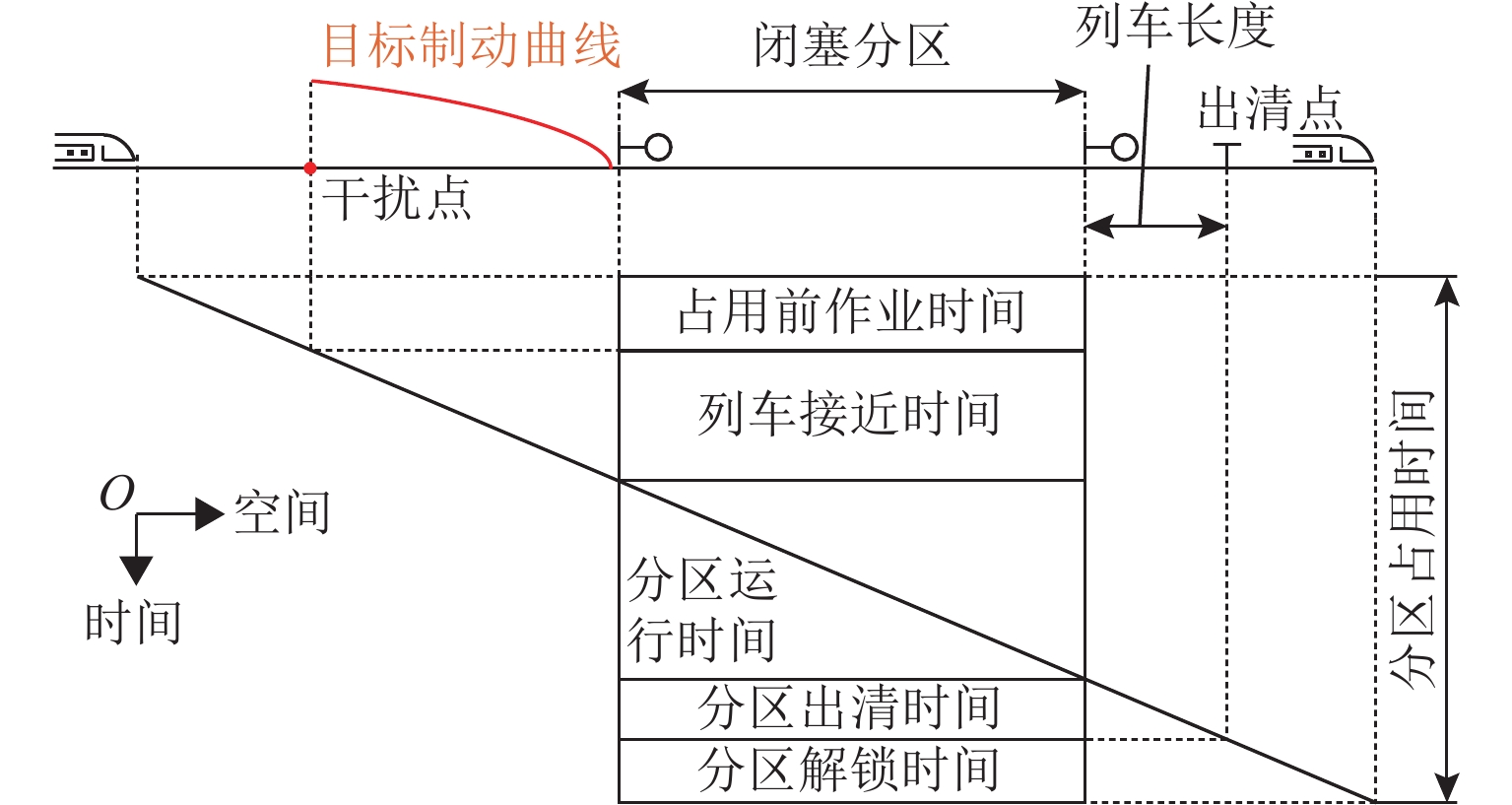
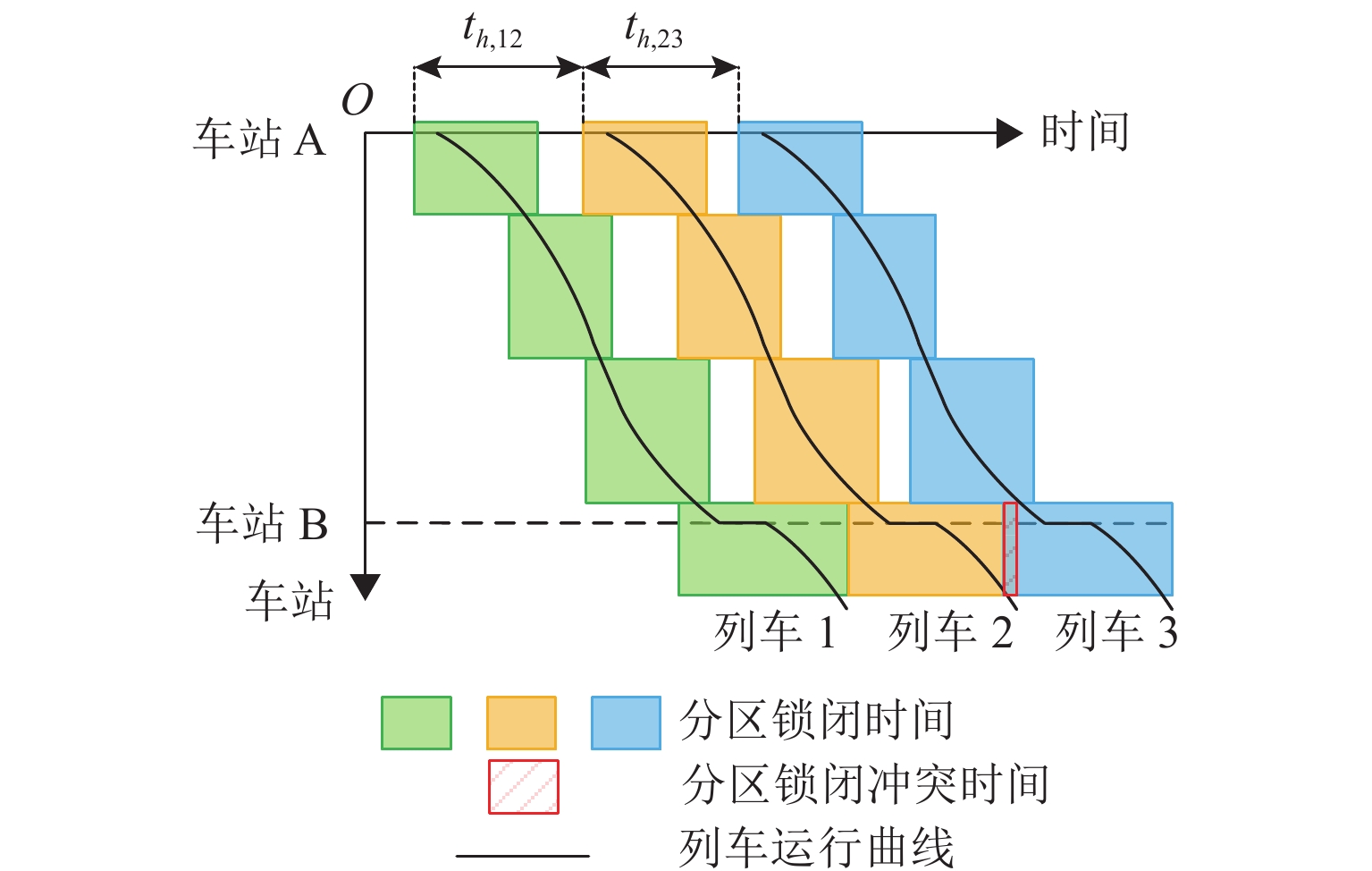
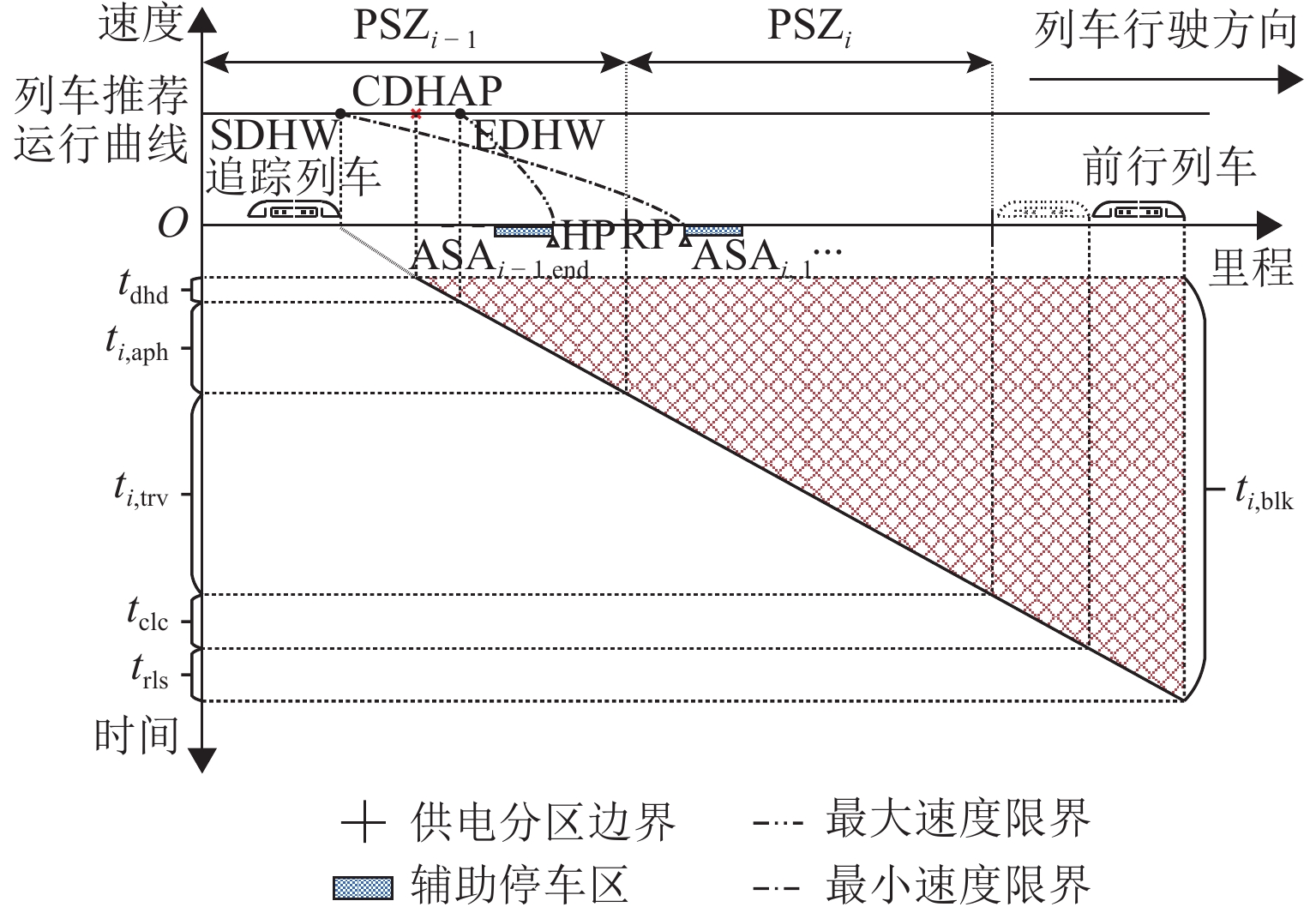
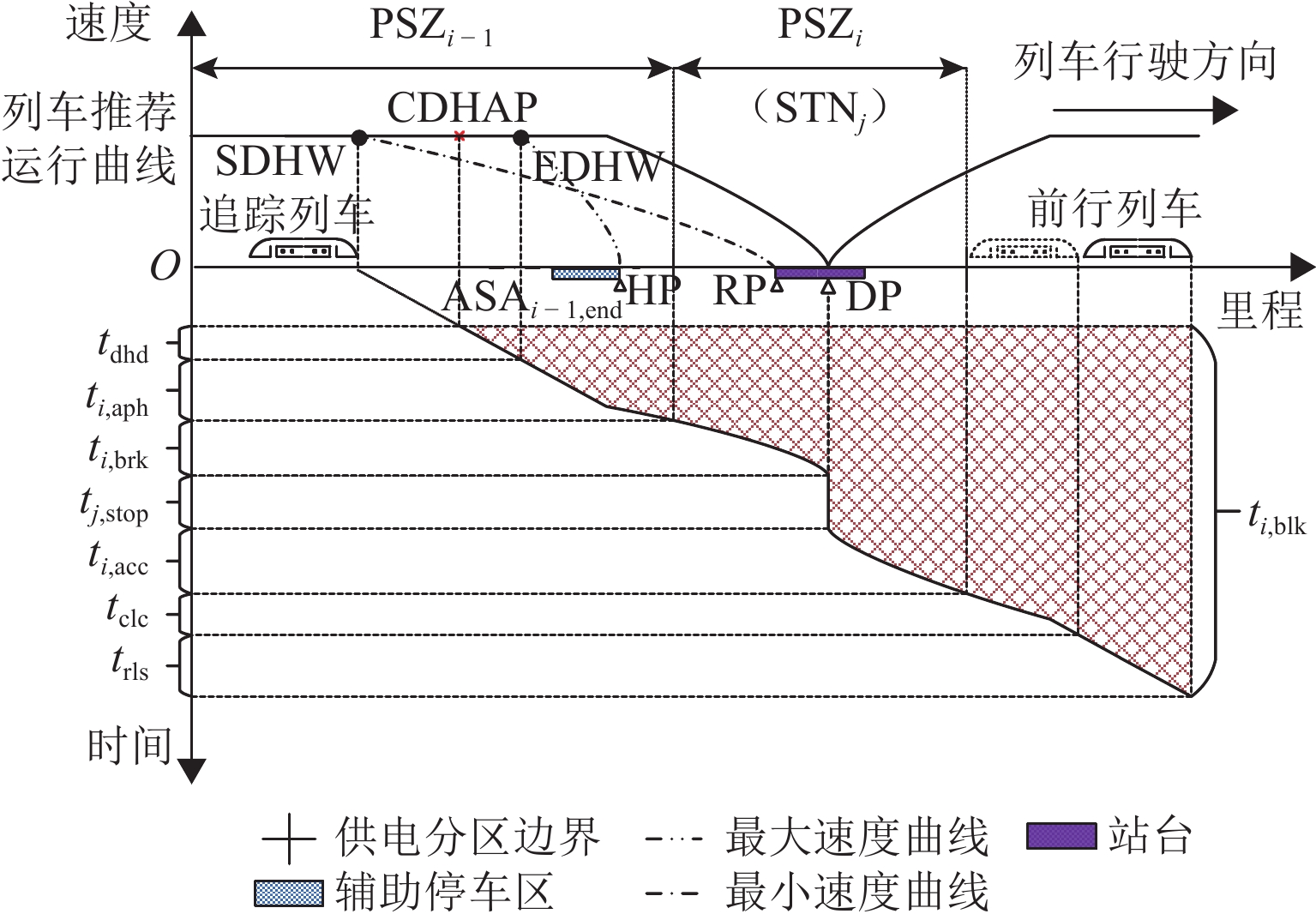
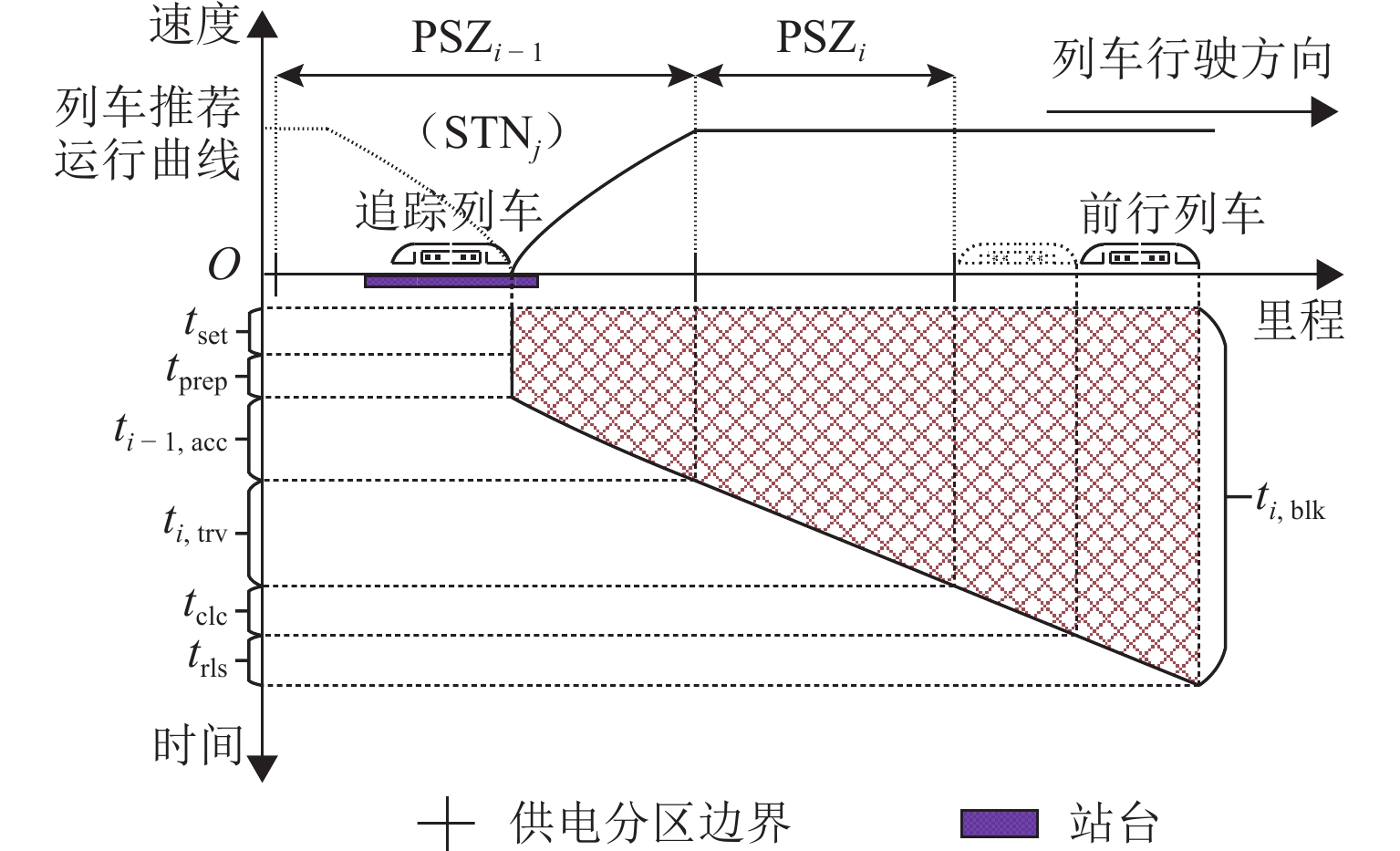
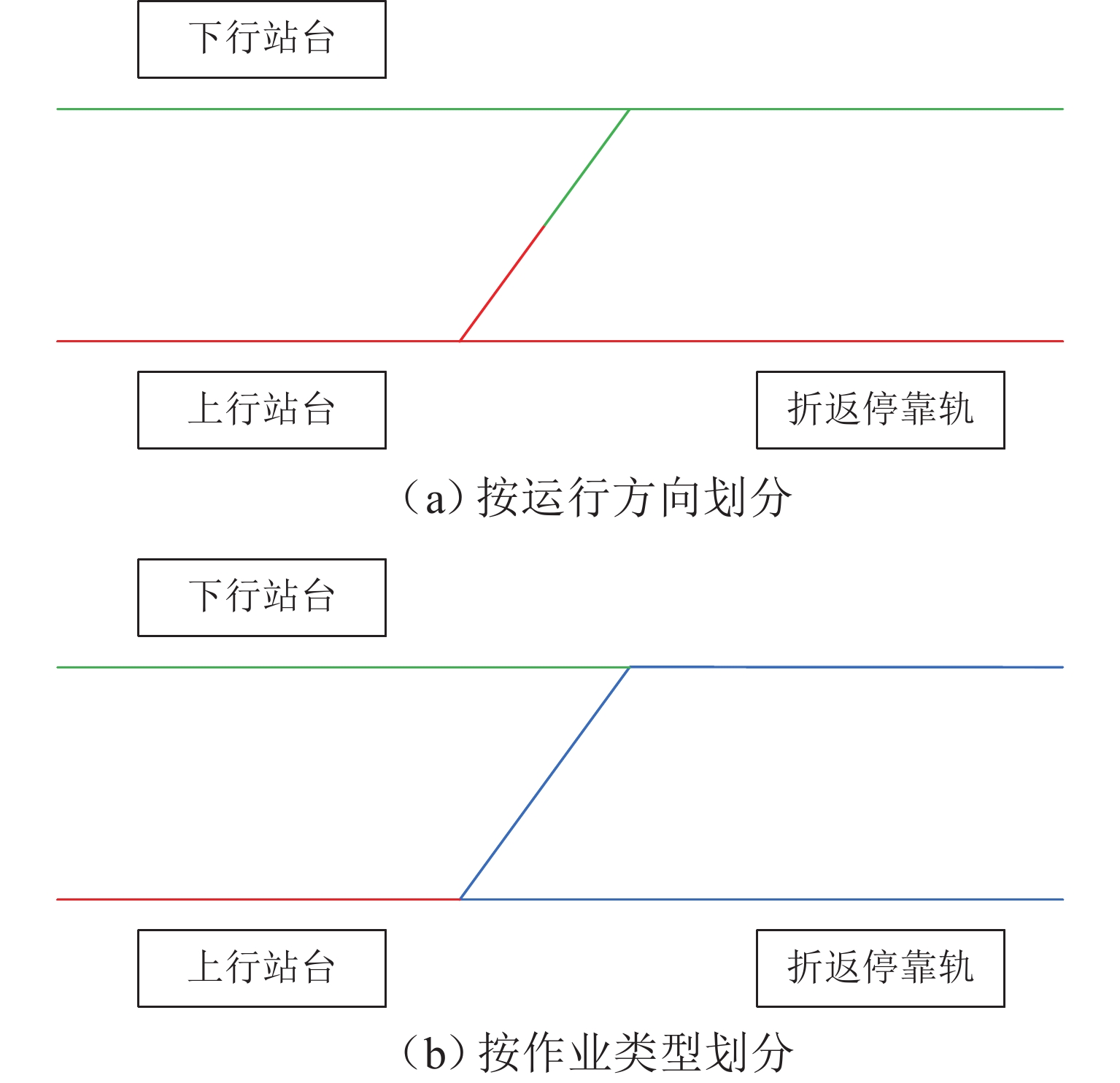
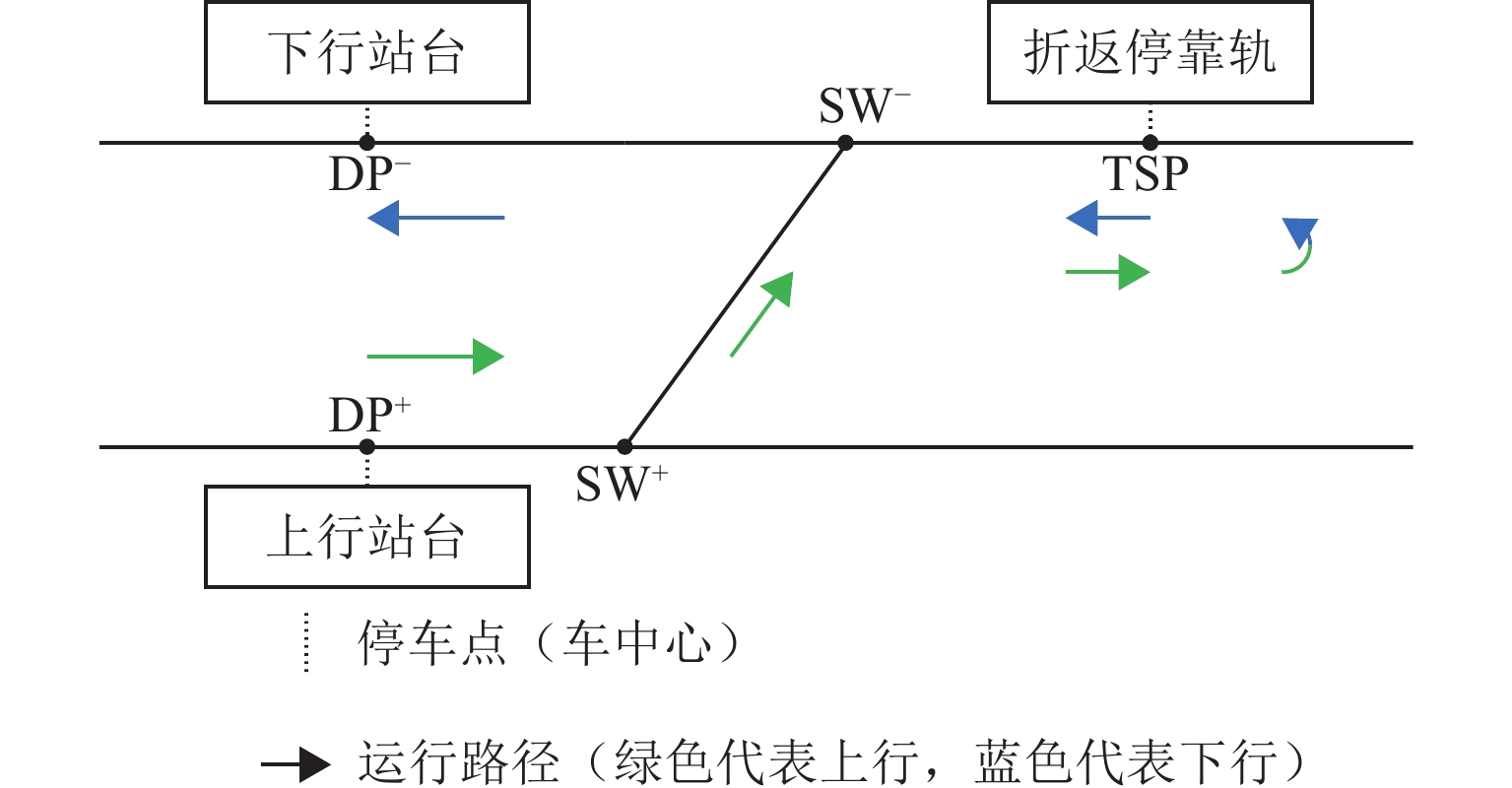
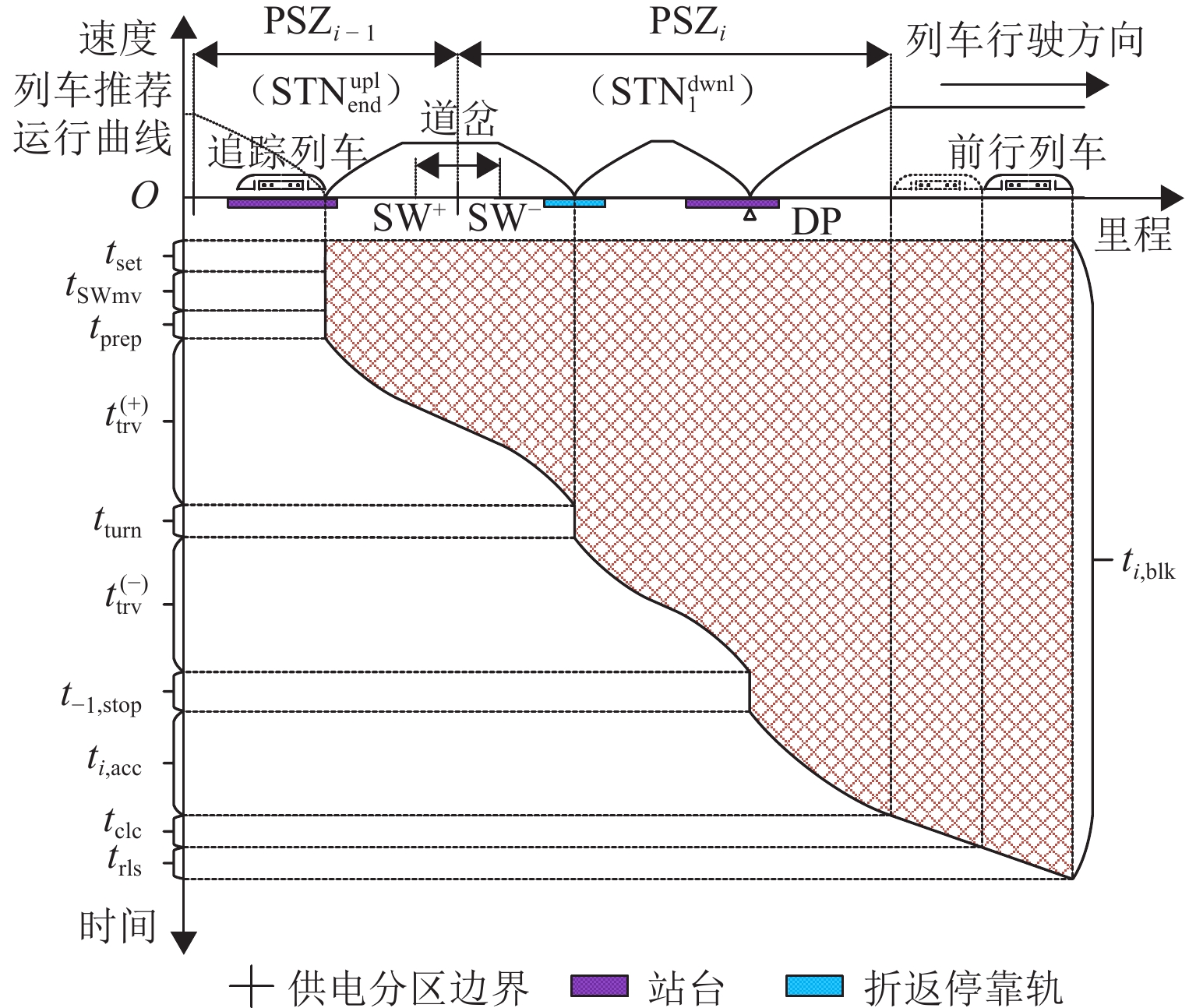
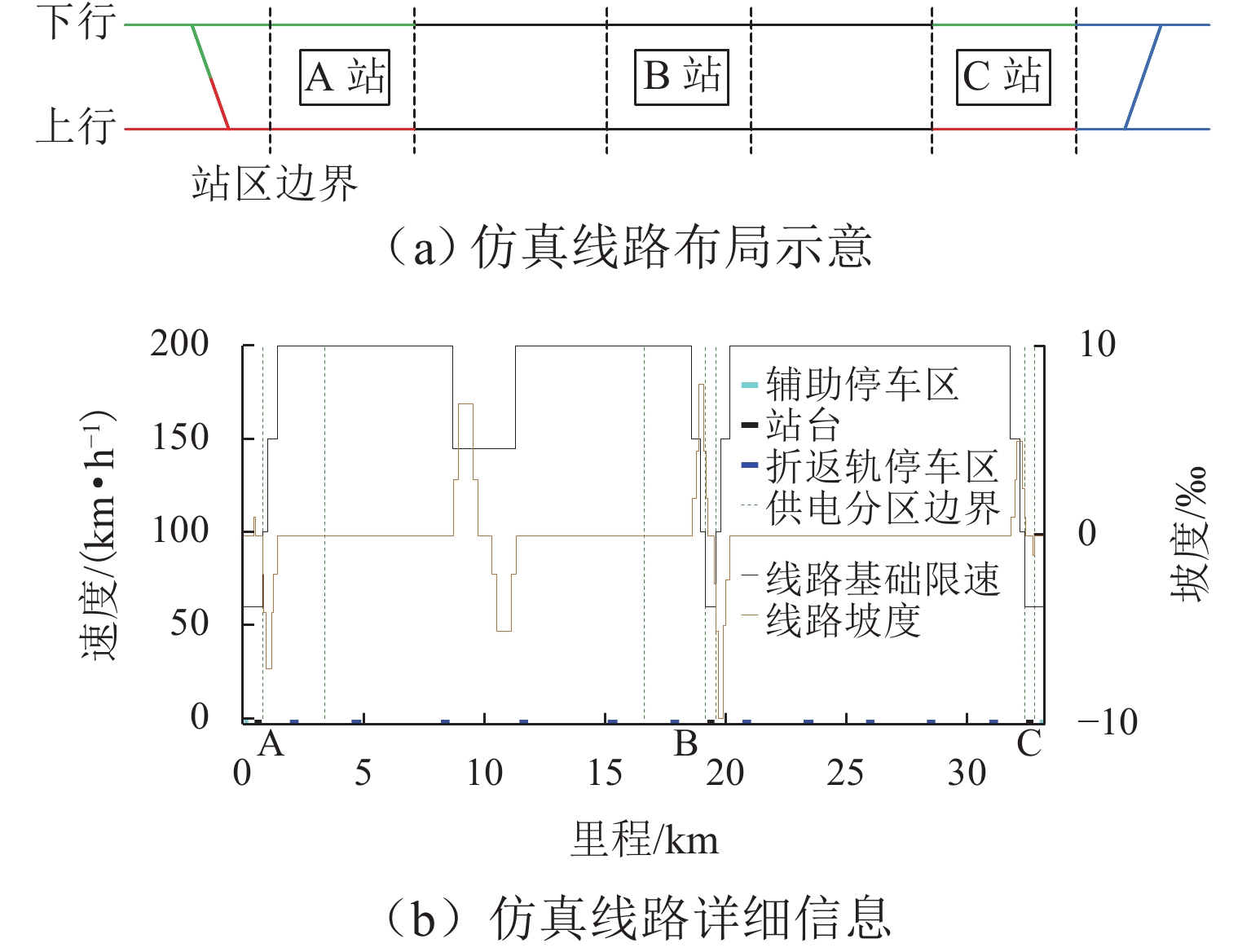
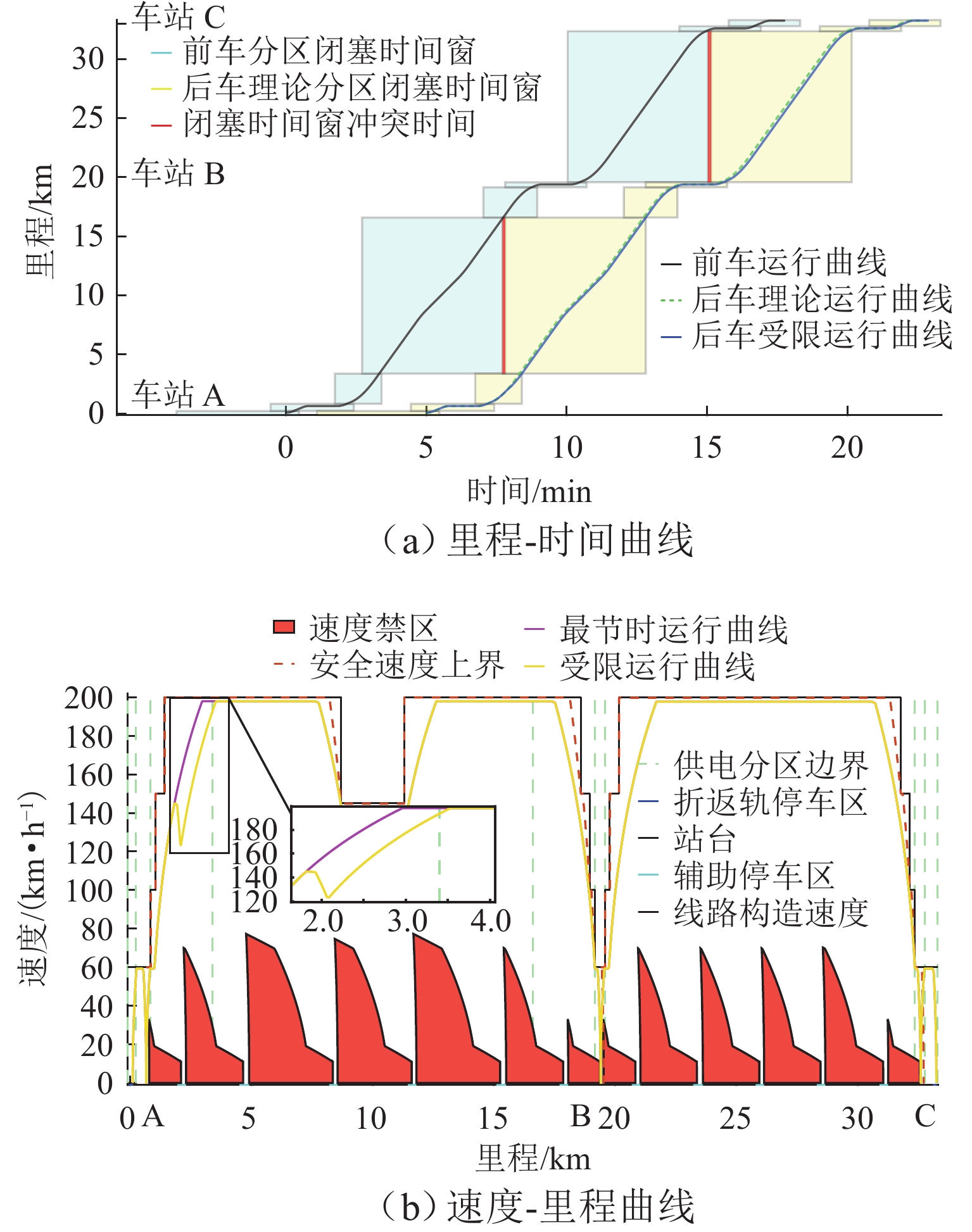
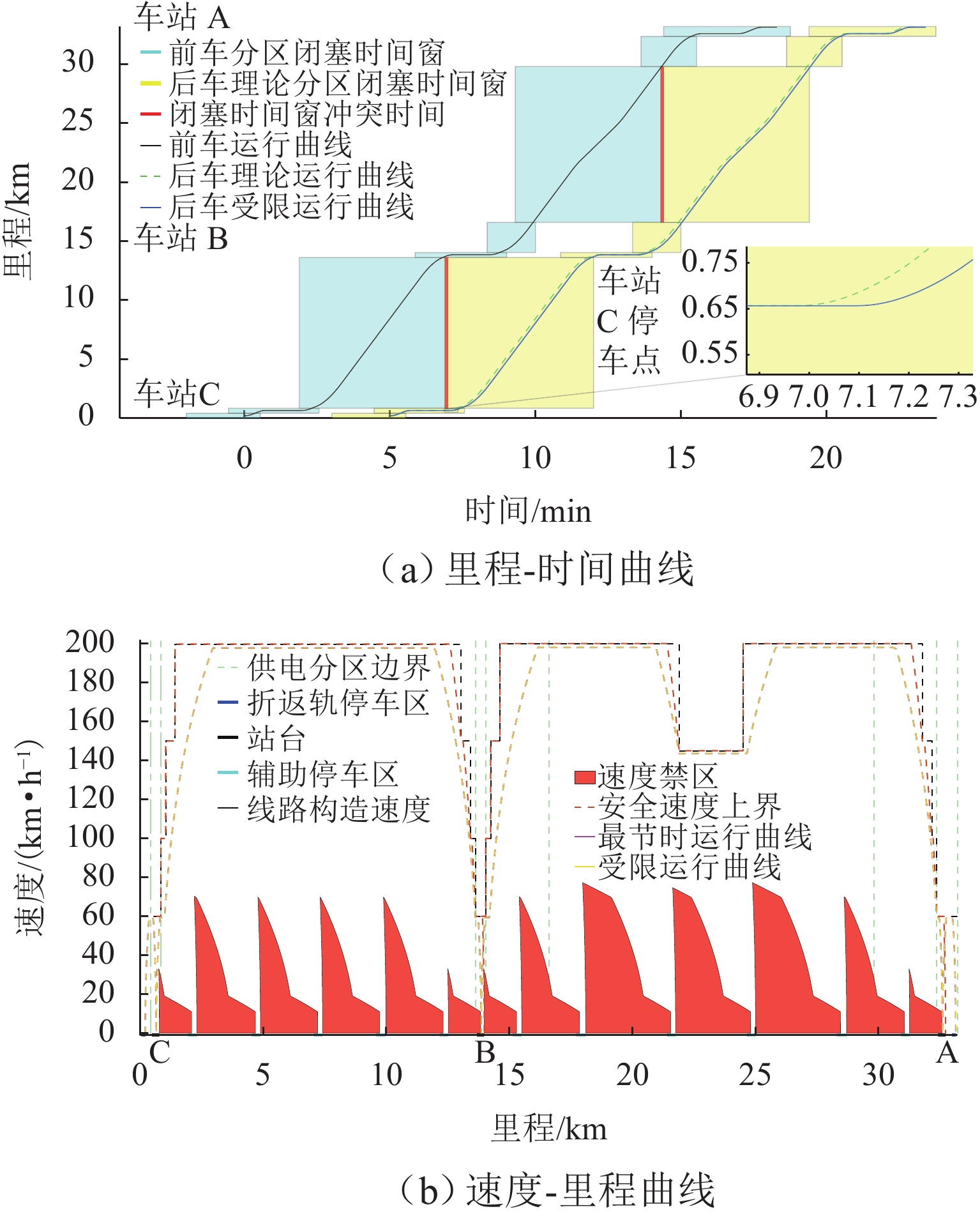
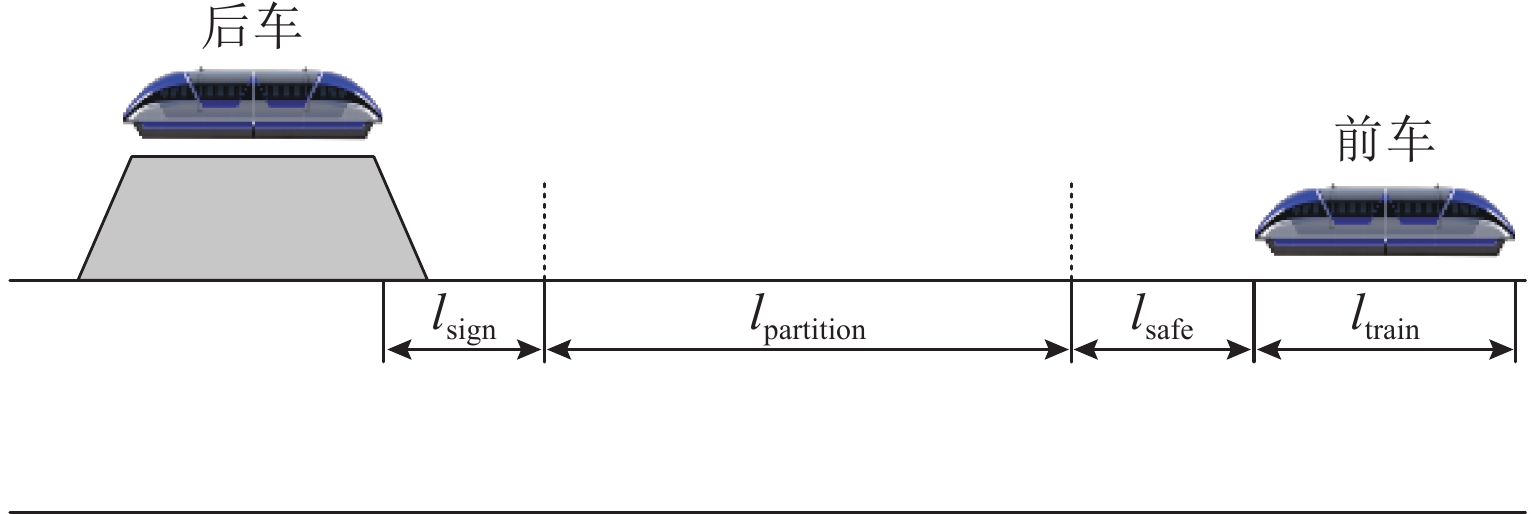
The medium-speed maglev transportation system has broad application prospects in the field of intercity and urban rail transit. However, the exact calculation problem of the transport capacity of maglev lines cannot be effectively solved by using the calculation methods of traditional wheel-rail systems. According to the actual needs of operation organizations, based on the technical characteristics of the medium-speed maglev system and integrating the constraint requirements of operation control and safety protection, the calculation method of transport capacity of medium-speed maglev lines was studied. Firstly, through an in-depth analysis of the rigid protection constraint of “one block partition for one running train” followed by medium-speed maglev trains, as well as the stop-point stepping control mechanism and quasi-moving block tracking protection mode adopted by the operation control system, the adaptability between the blocking time theory and the technical characteristics of the medium-speed maglev operation control system was demonstrated. On this basis, taking “blocking time theory and identification of the most unfavorable partition handover application point” as the core research paradigm, quantitative models of partition blocking time under four types of typical full-process operation scenarios, including interval operation, station arrival stop, platform departure, and station rear turn-back, were constructed, and an algorithm for solving transport capacity of lines based on time window compression was proposed. Finally, a specific line case was selected, and the validity of the output results of the proposed calculation models and algorithms was verified through a dual verification system combining simulation experiments and limit pressure tests. Simulation results indicate that the theoretical limit value of the transport capacity of the target line is 11 trains/h. If an extra running line is added, the running process of the following train is inevitably interfered by the preceding train. The proposed models and algorithms possess good calculation accuracy and engineering applicability.
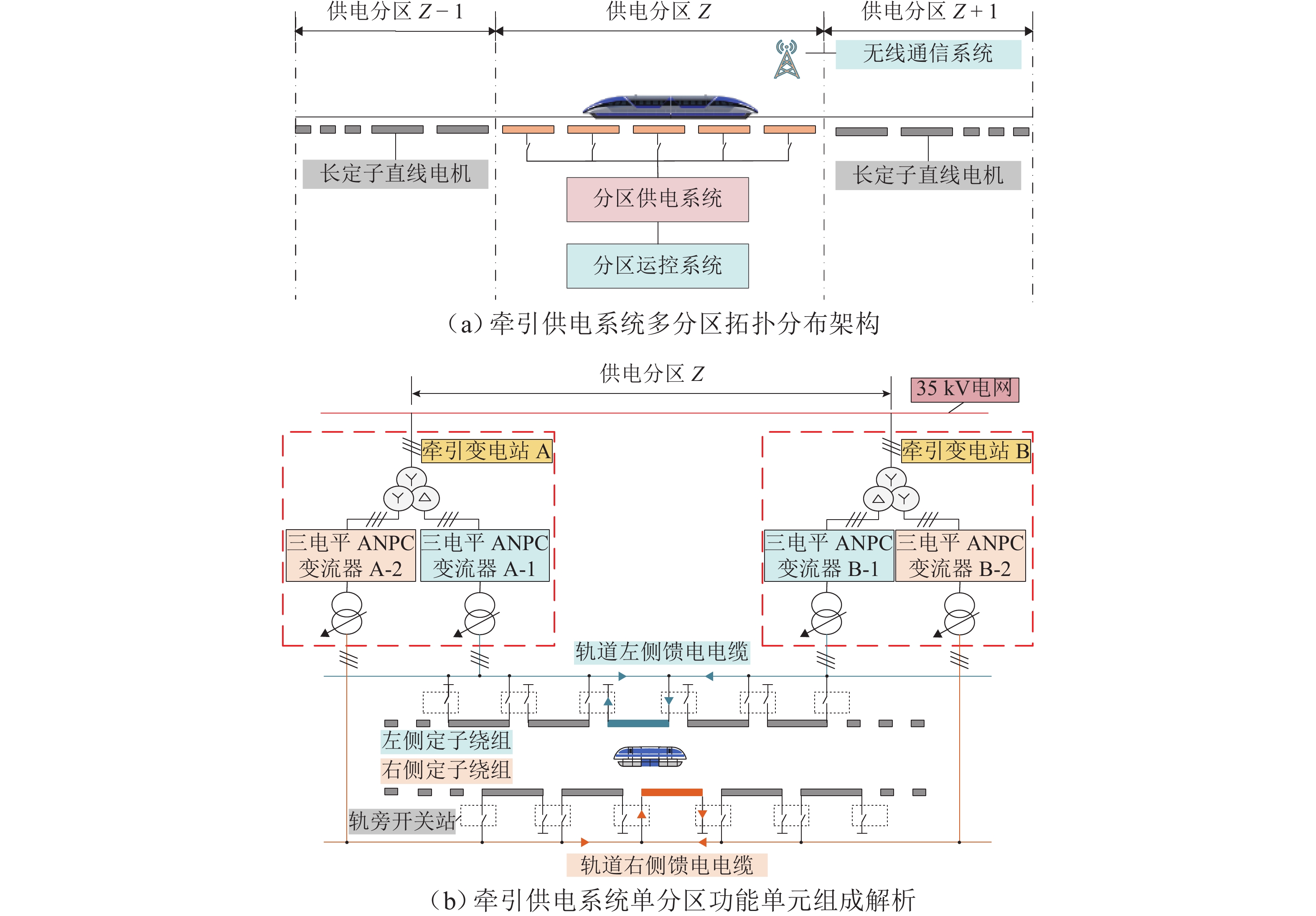
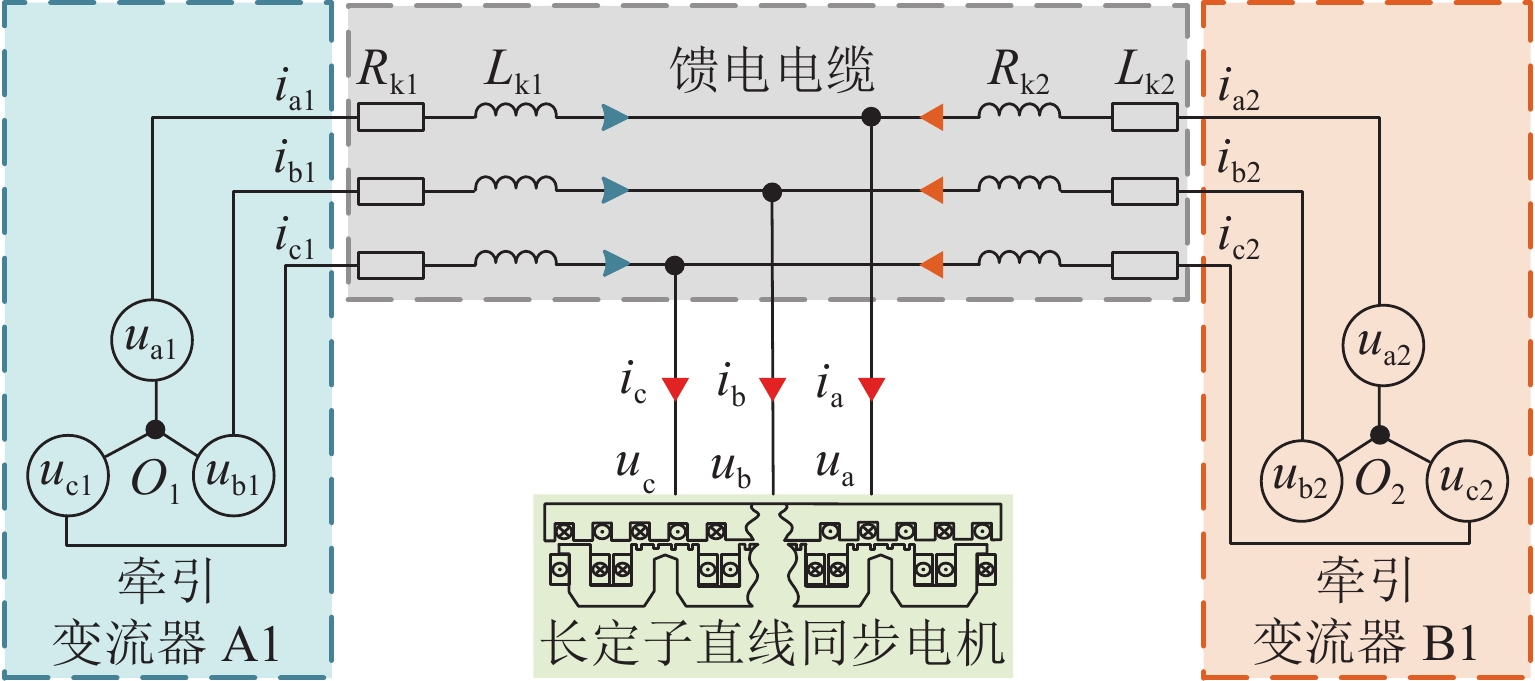
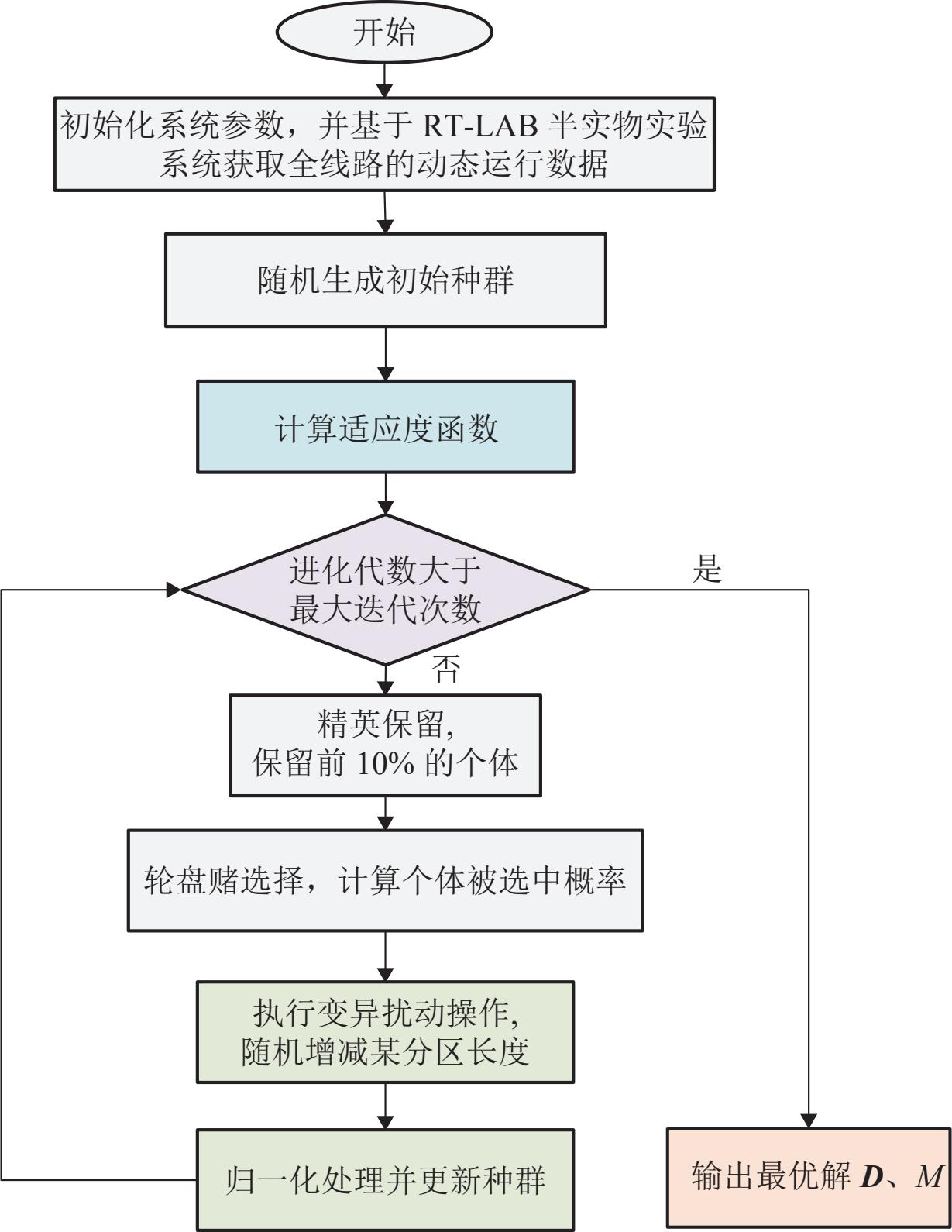
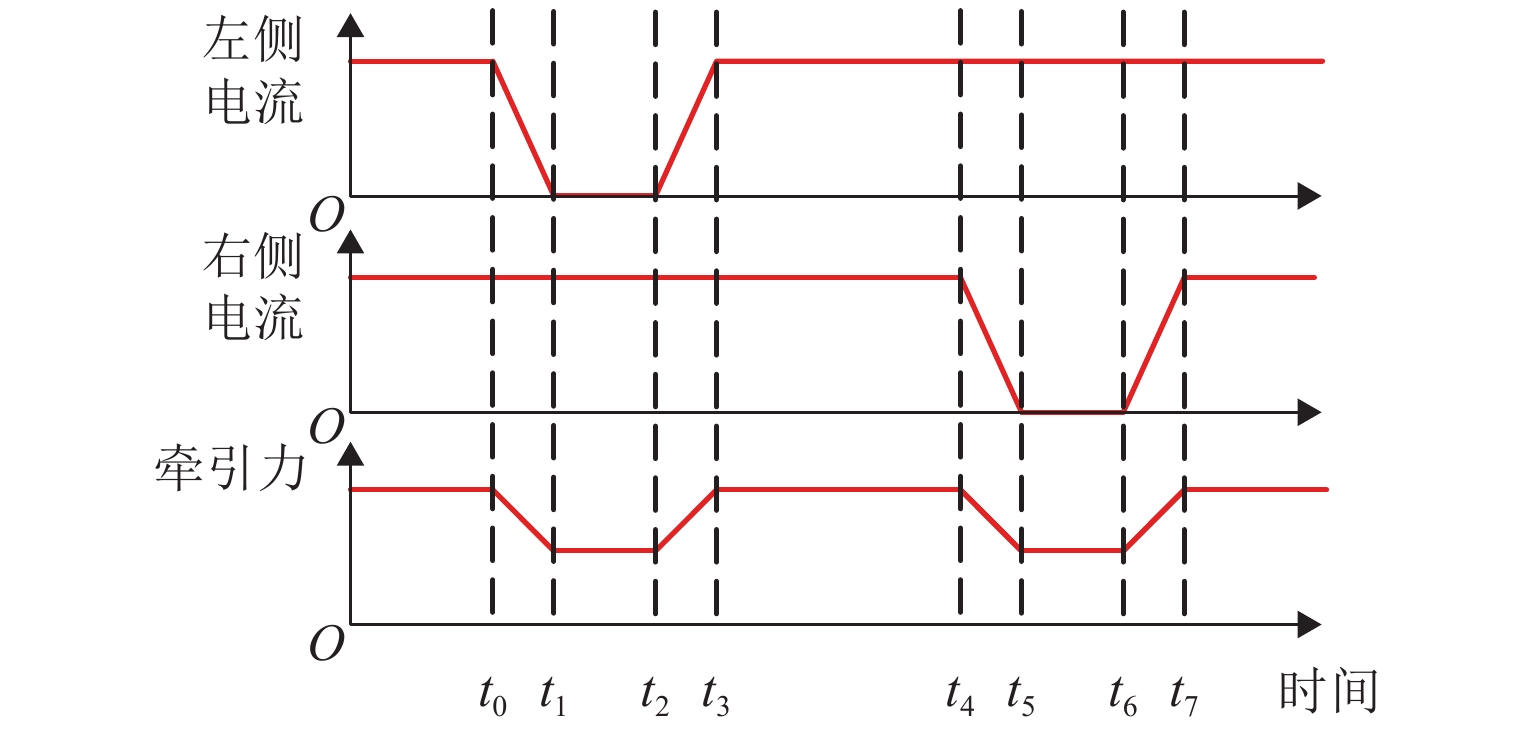
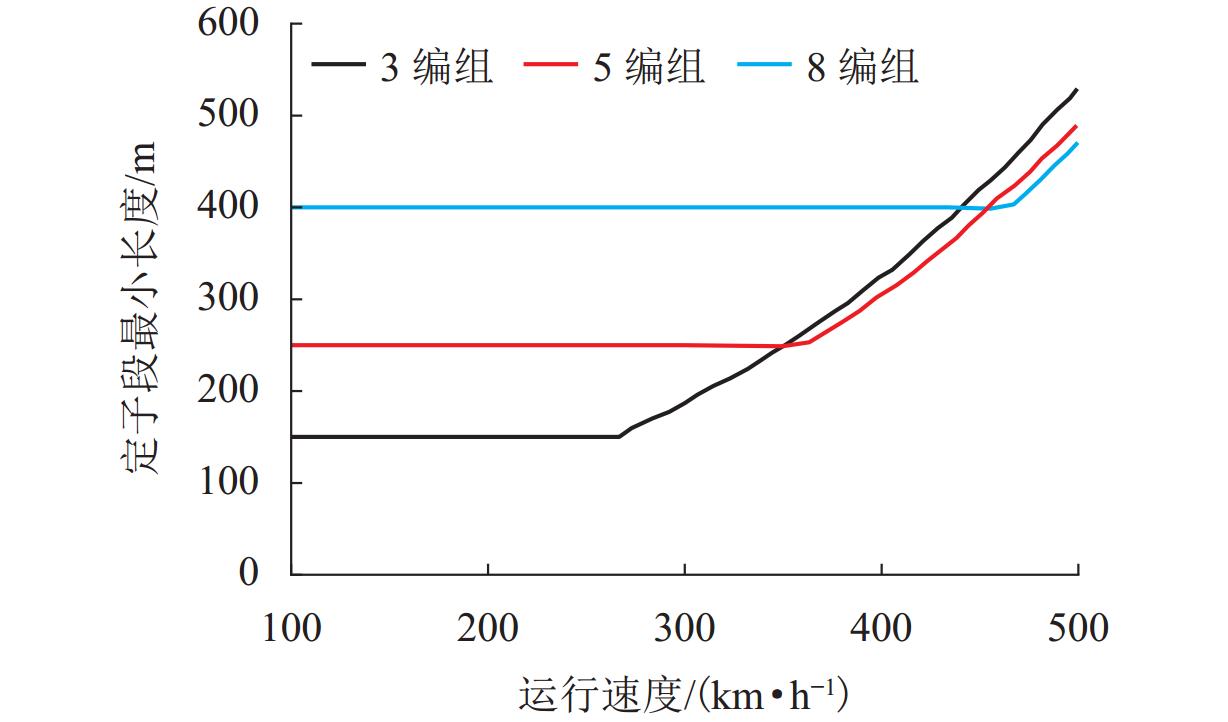
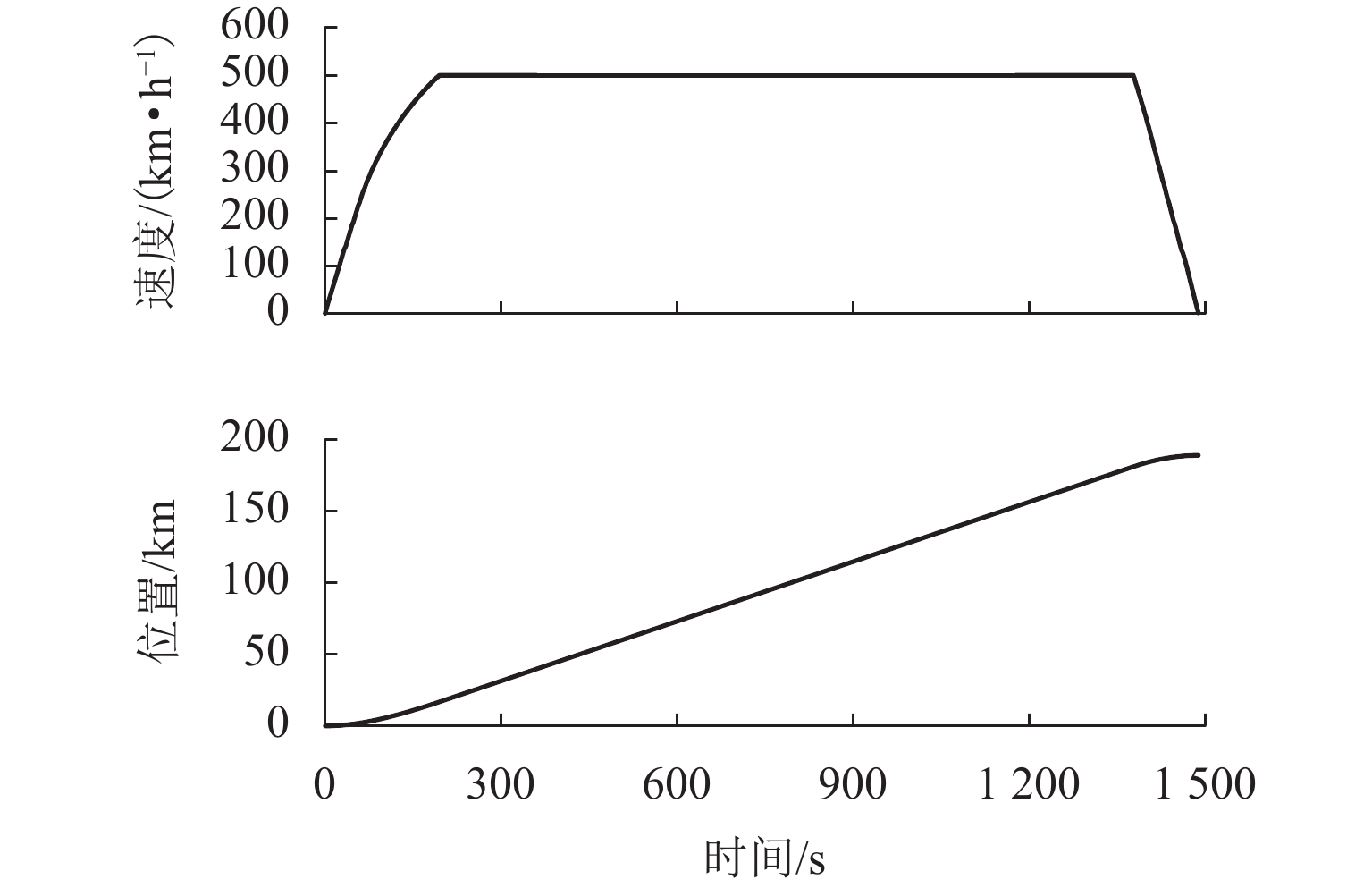
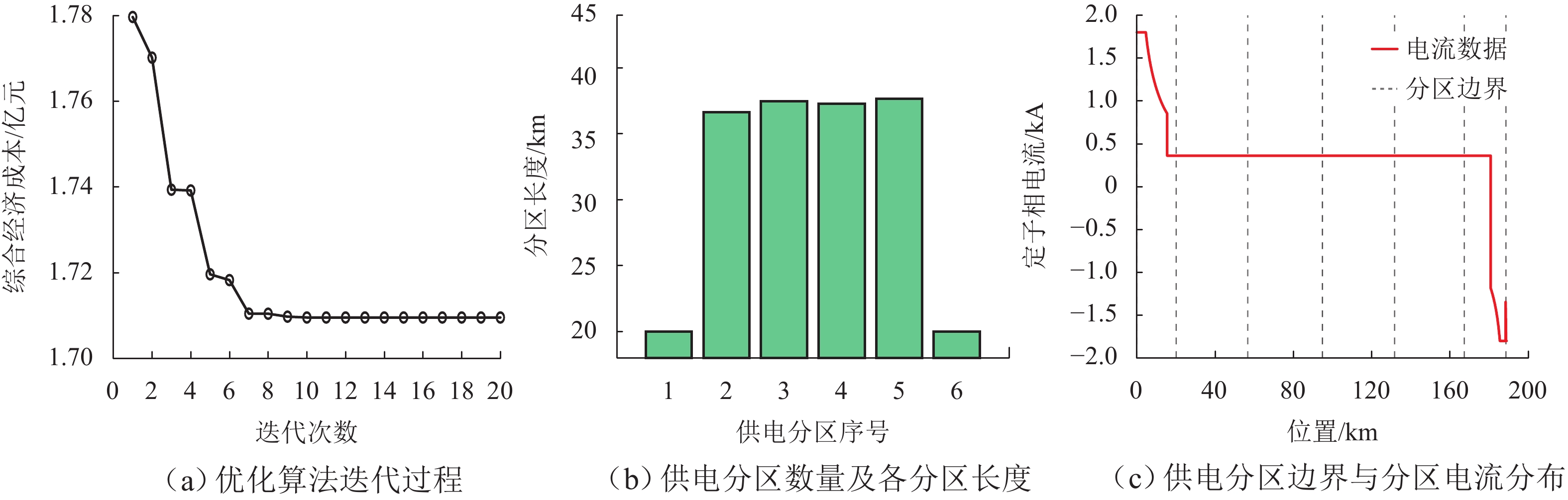
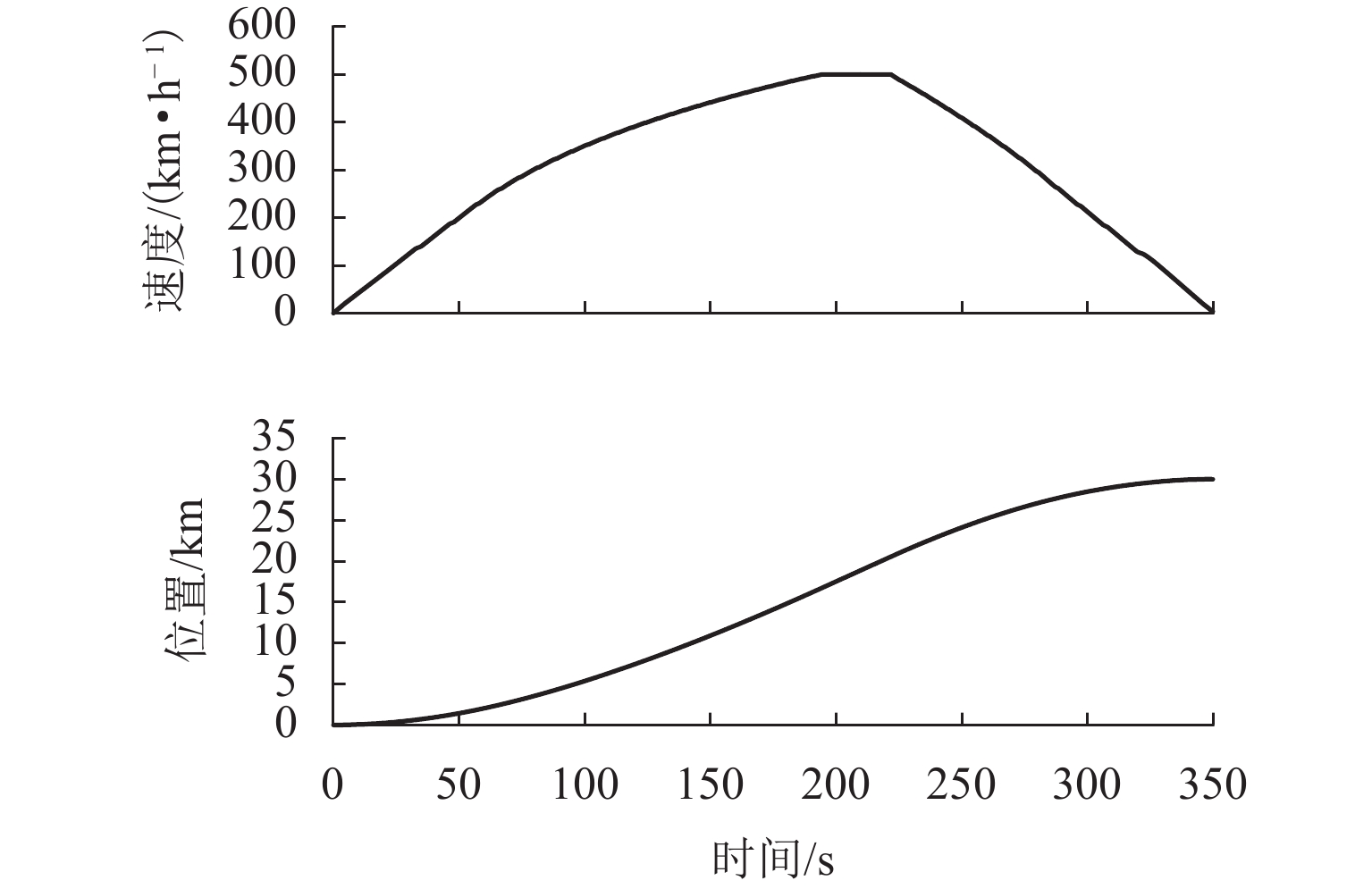
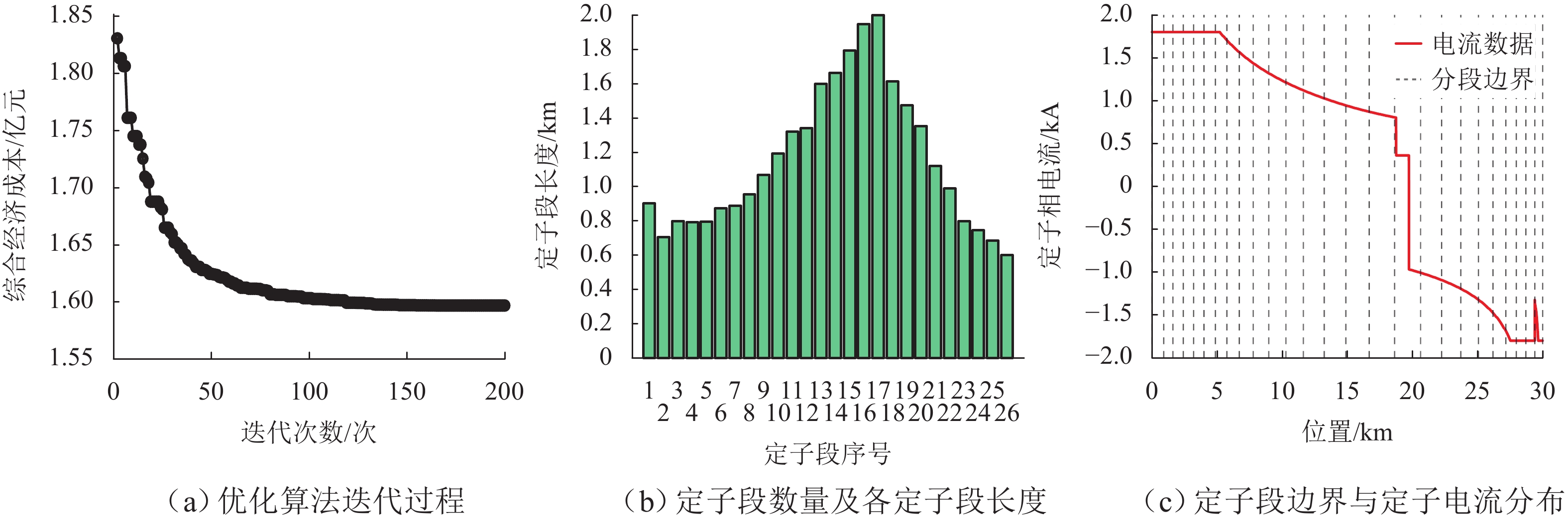
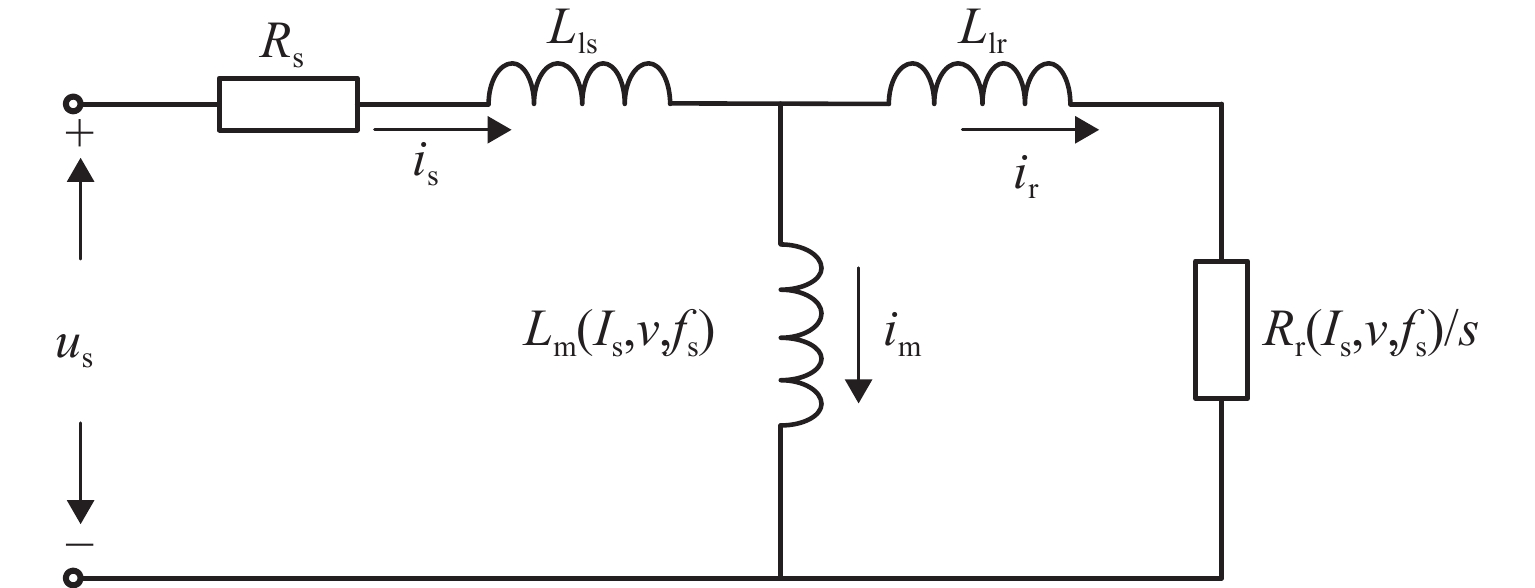
To enhance the economic efficiency of the traction power supply system of high-speed maglev, an optimization design method integrating power supply partitions and stator segment length was developed using the improved genetic algorithm. Firstly, a mathematical model of the traction system was established through analysis of equivalent circuits under dual-feeding mode. The effective range of power supply partitions was determined to be 20–40 km through comprehensive consideration of tracking intervals and traction performance constraints. Then, the design length of the stator segment was 600–2 000 m according to step-switching control and traction performance constraints. On this basis, the dynamically-constrained adaptive genetic algorithm was employed to optimize the design of the power supply partitions and stator segment length, so as to minimize the overall economic cost. Finally, the Shanghai–Hangzhou maglev planning line and the Shanghai maglev demonstration line were selected as validation subjects. Through hardware-in-the-loop simulations, dynamic train operation data was acquired to compare the comprehensive economic cost of the traction system before and after optimization. Results show that for the Shanghai–Hangzhou line, the traditional design scheme requires seven 27 km power supply partitions of equal length. In contrast, the optimized scheme uses six differentiated partitions, among which the partition at the ends is 20 km, and the central partition is about 37 km. This reduces the comprehensive economic cost by 14.25%. For the Shanghai maglev demonstration line, the existing scheme uses 25 stator segments with a length of about 1 200 m each. The optimized scheme produces 26 unequal-length segments, forming a current-matched layout with shorter segments for higher current and longer segments for lower current, which reduces the comprehensive economic cost by 19.10%.

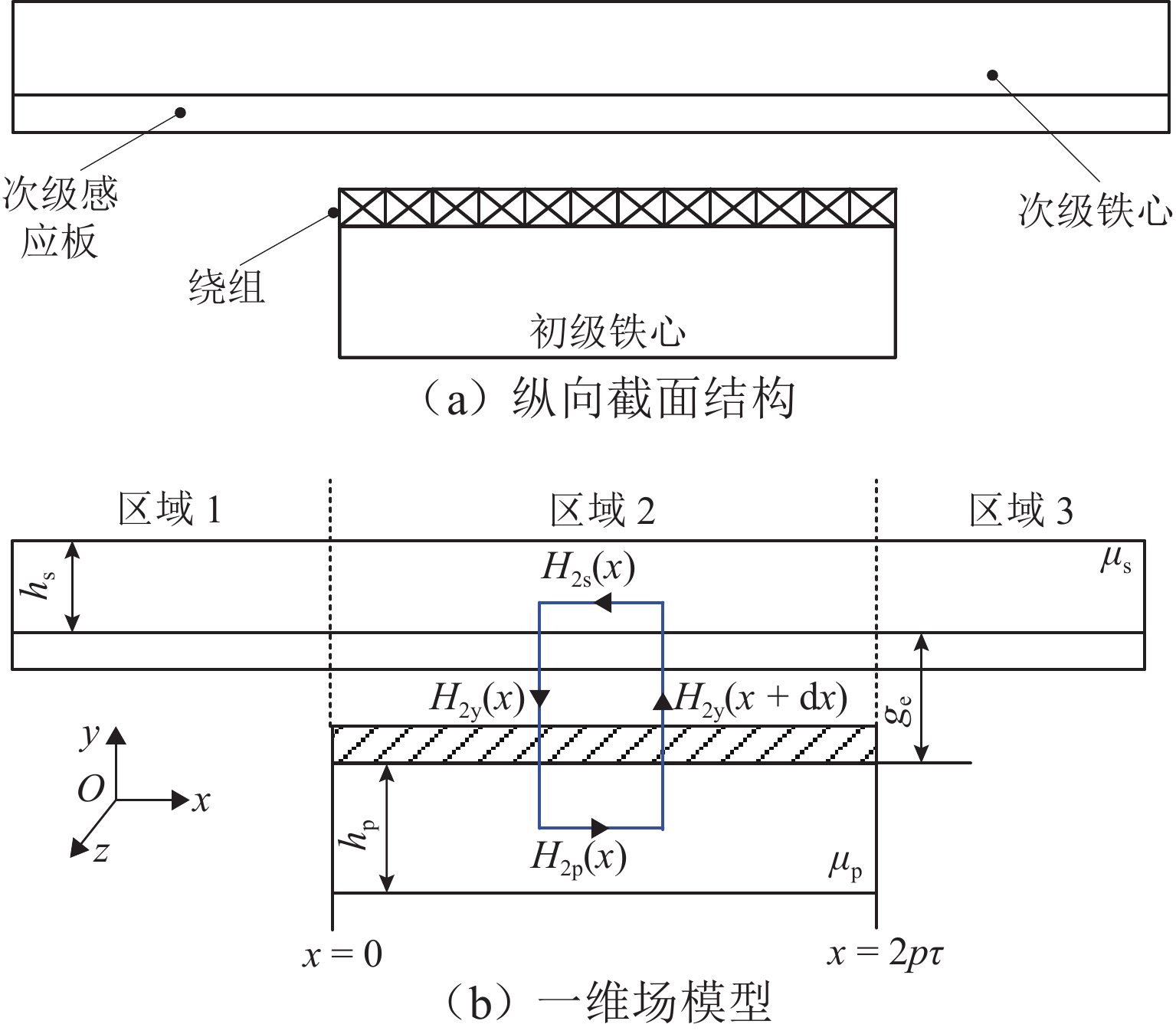
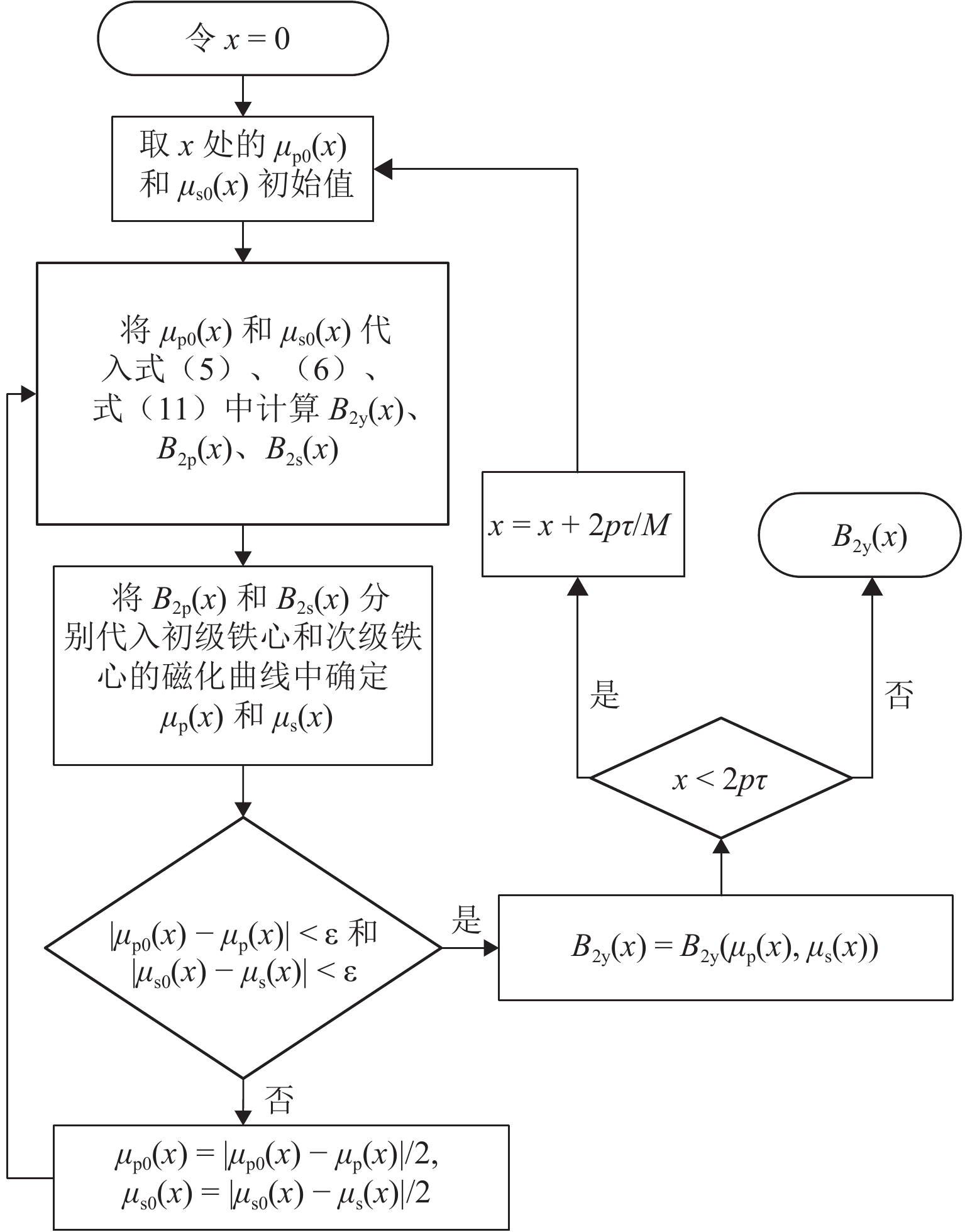
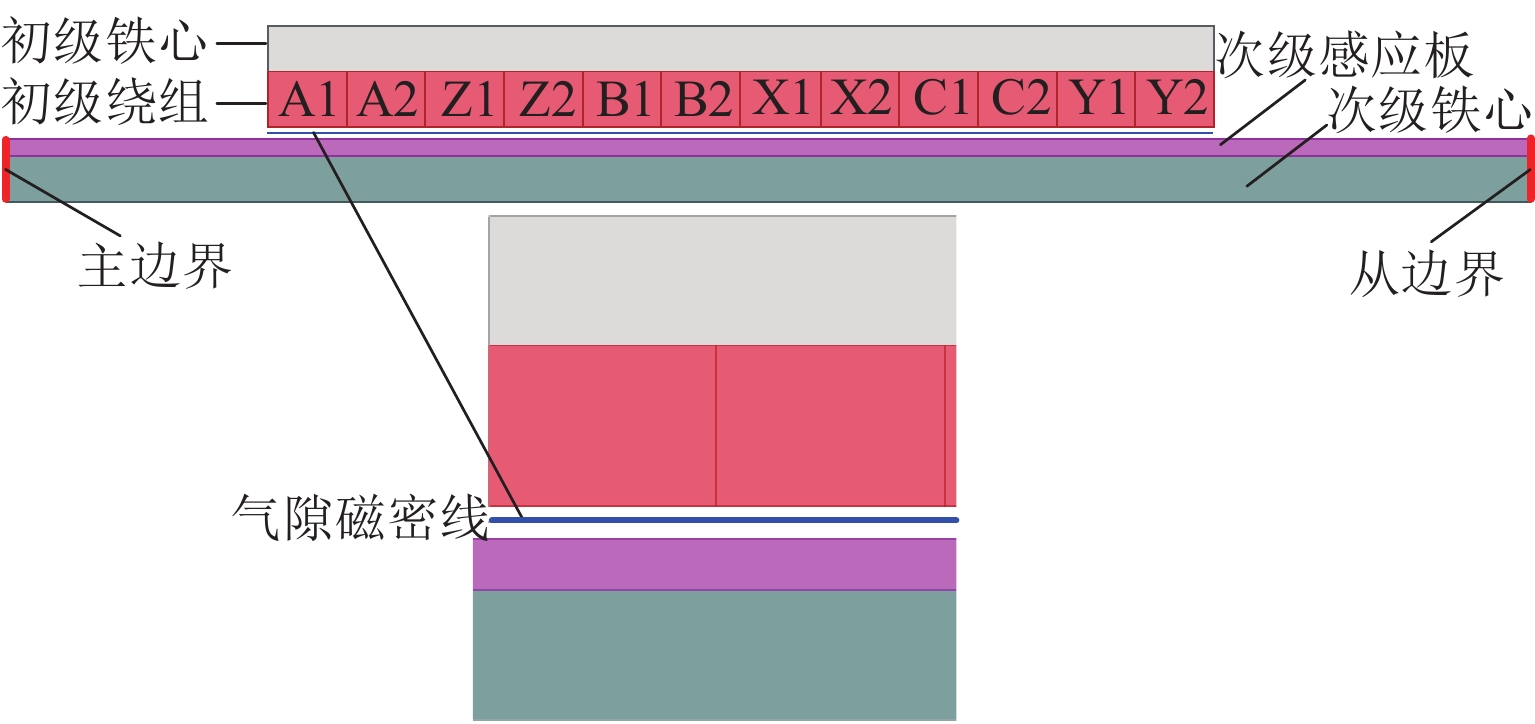
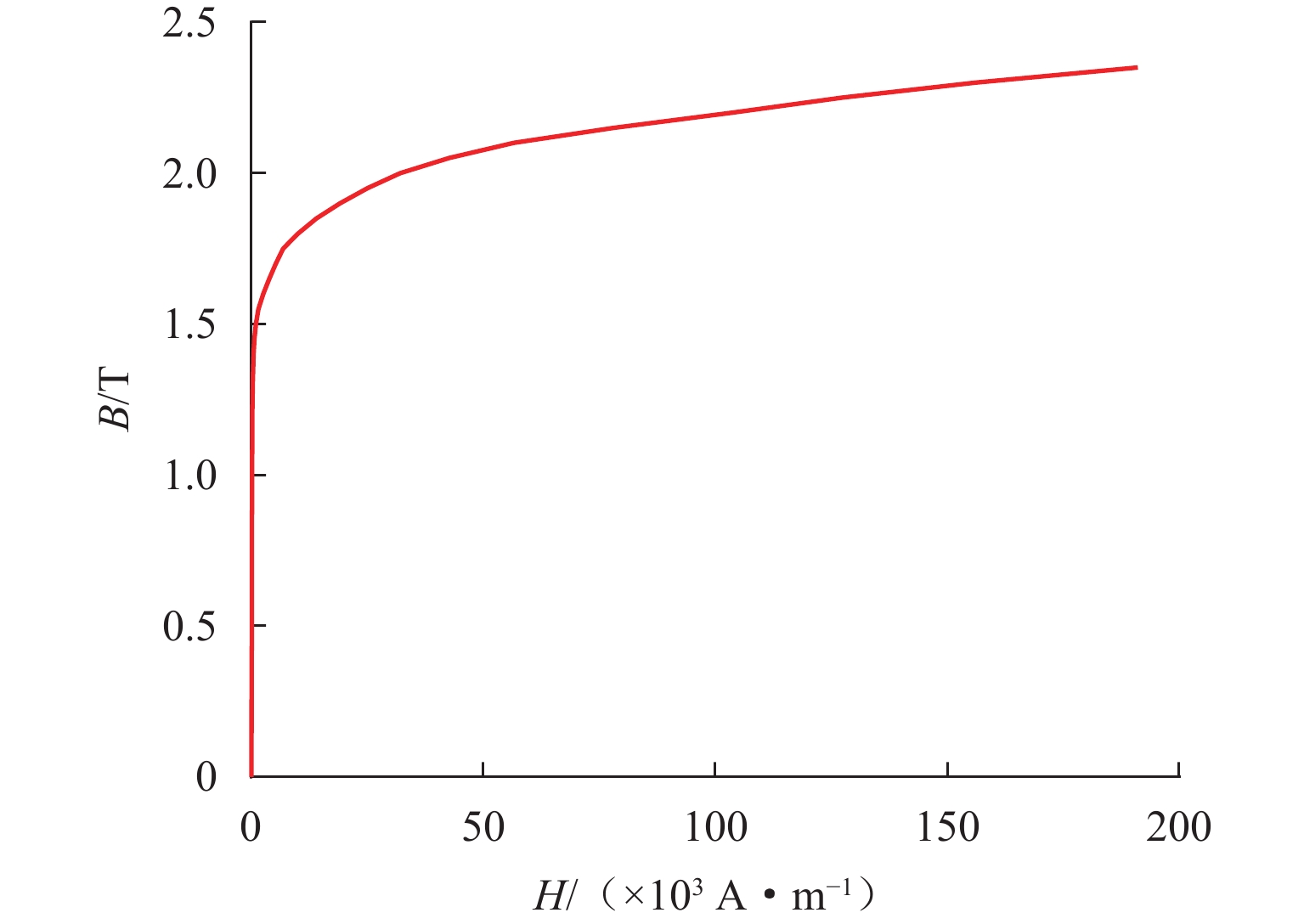
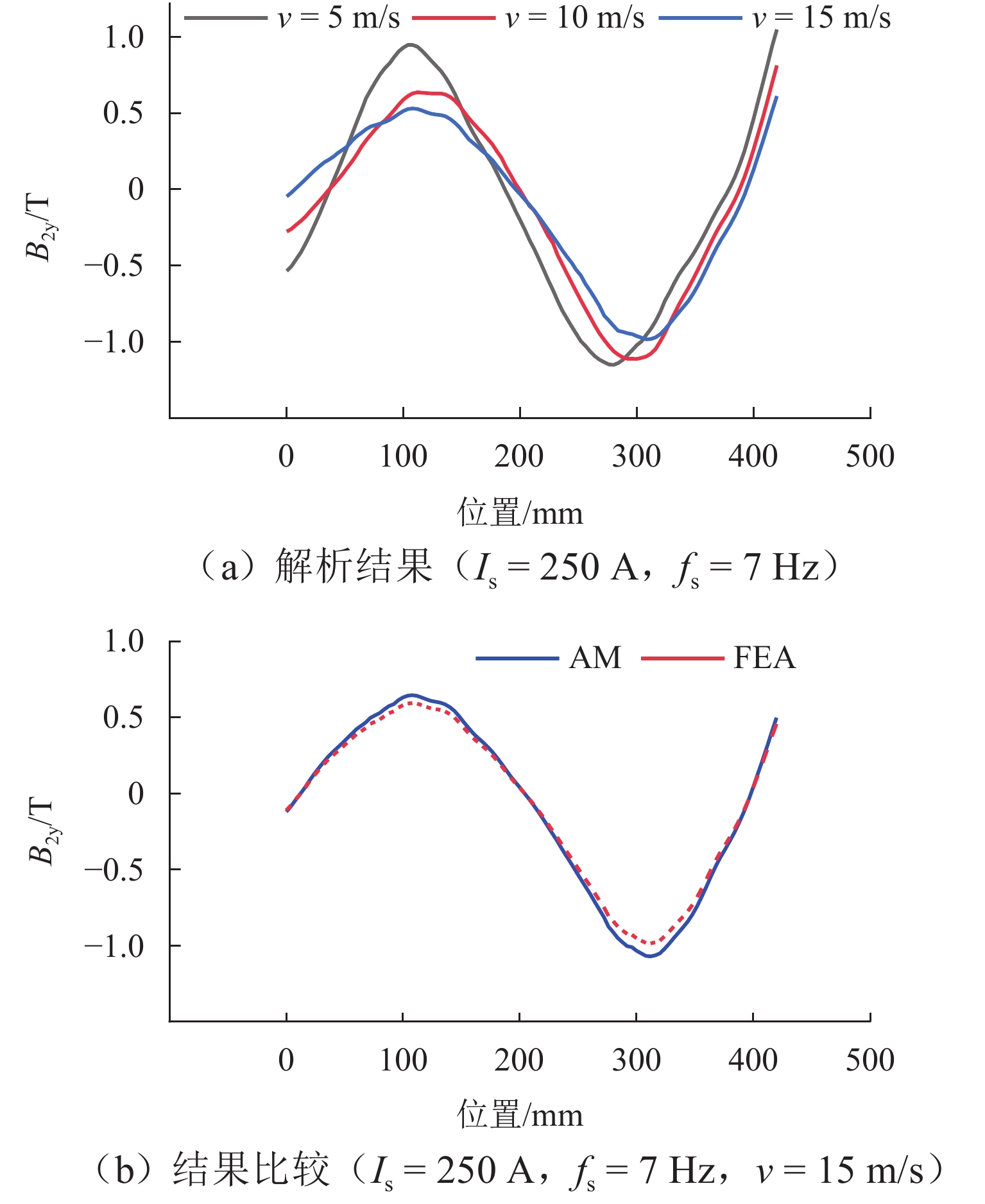
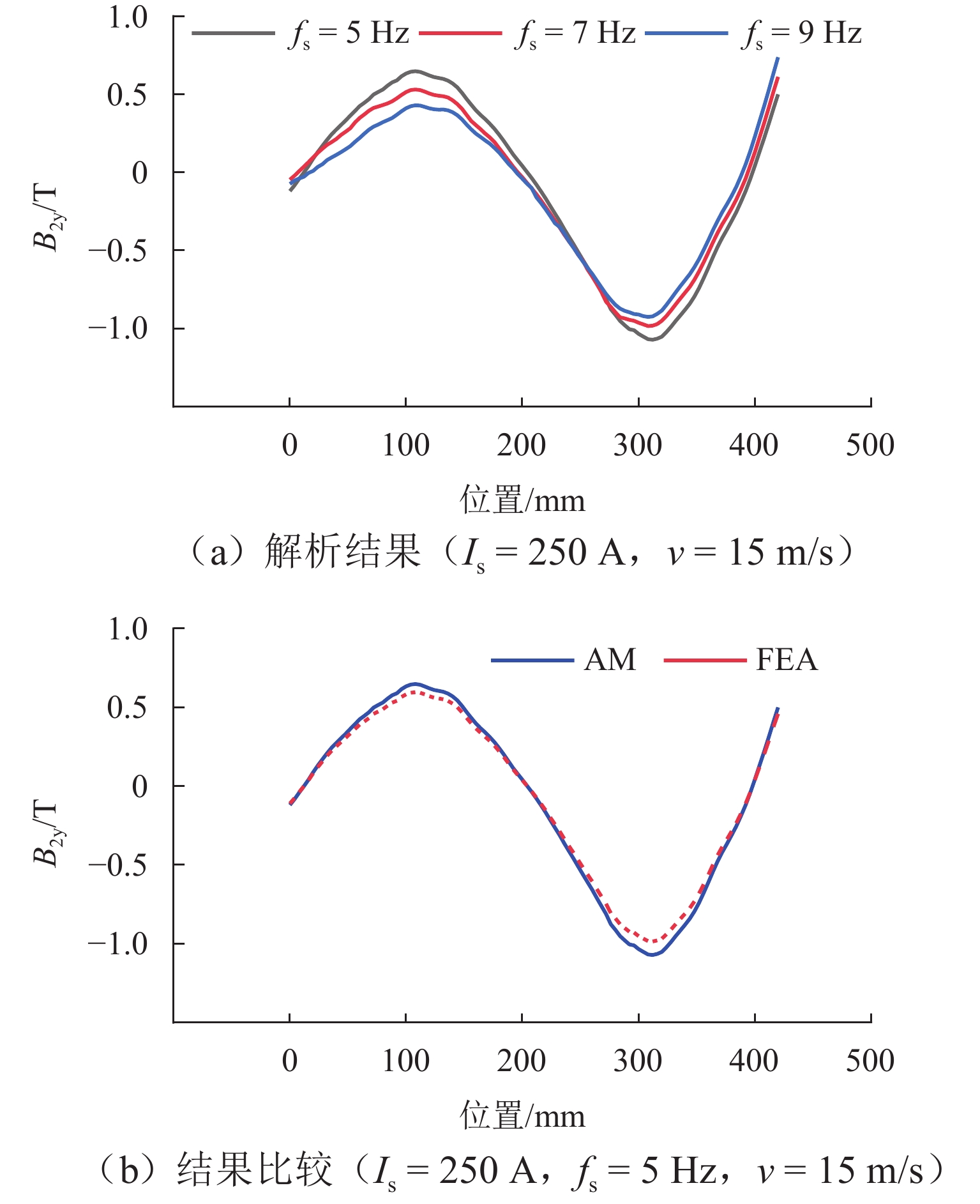
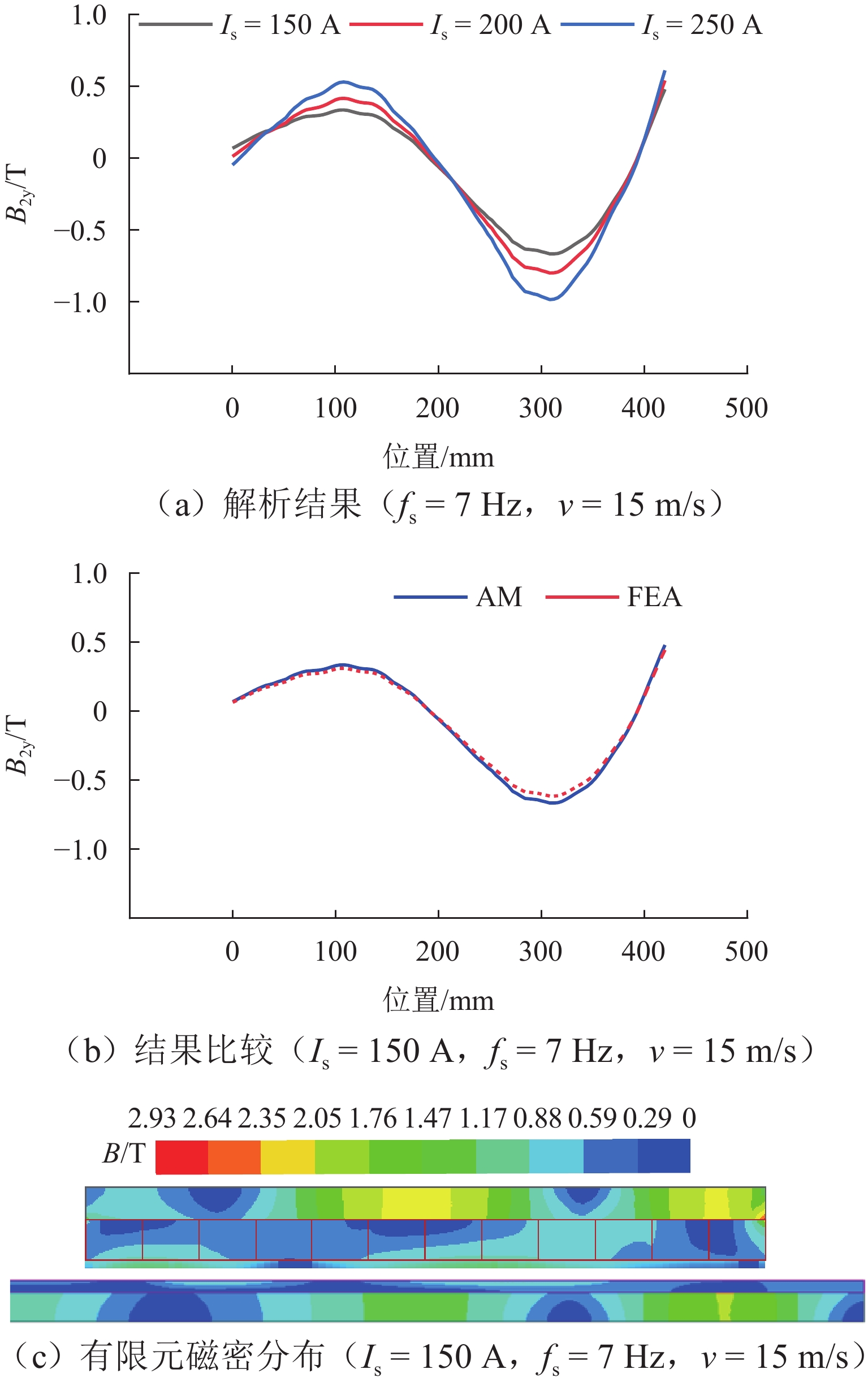
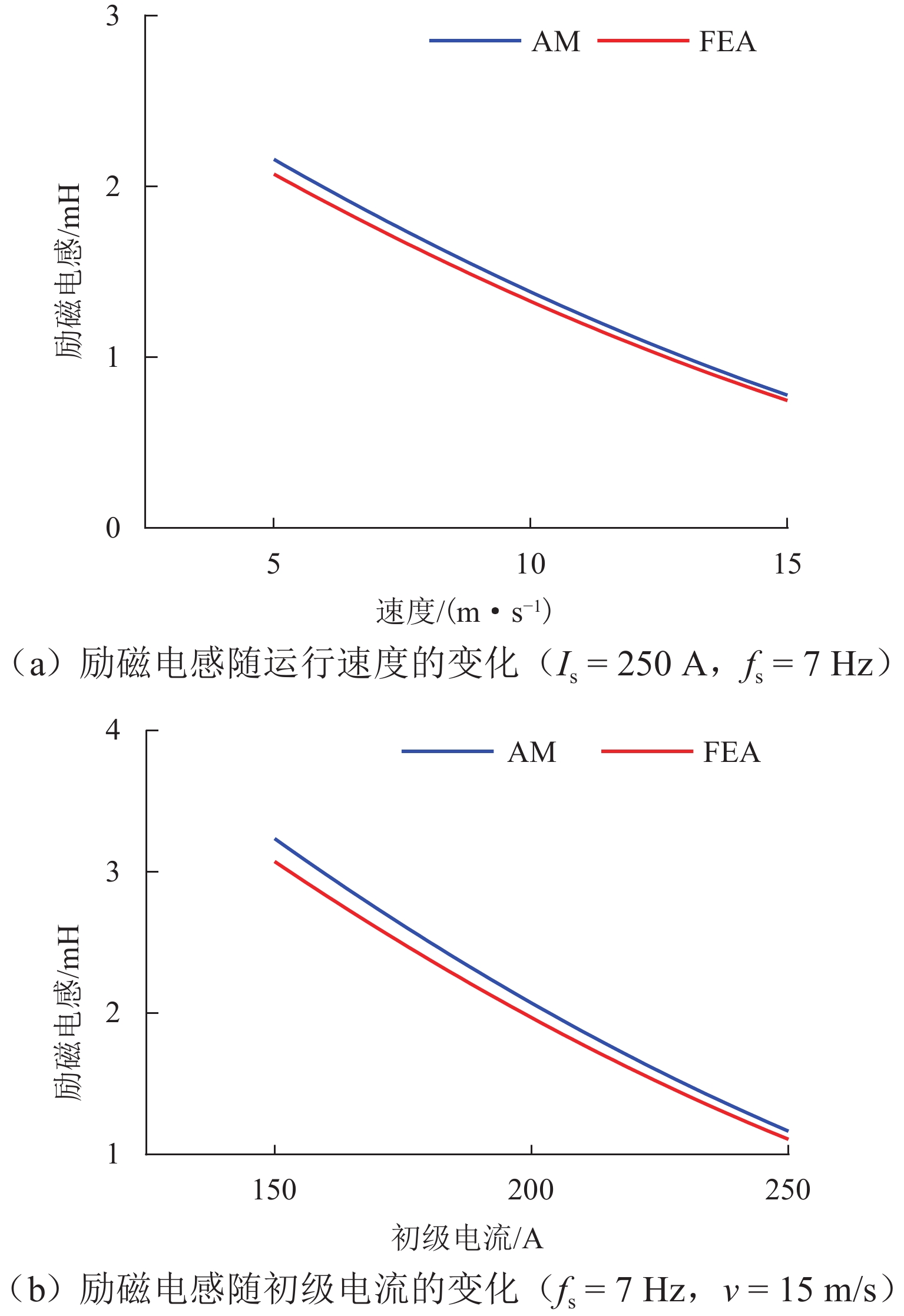
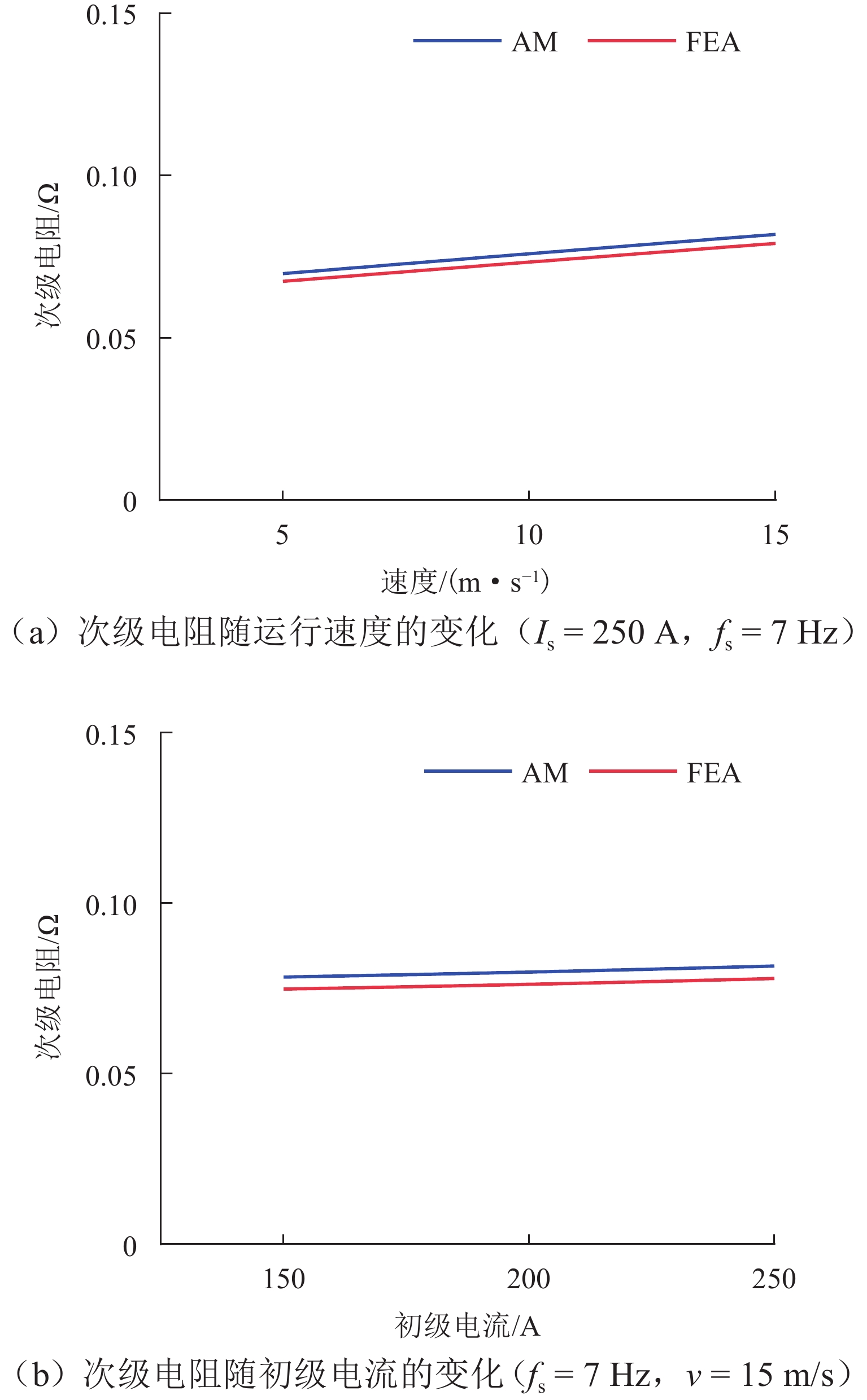
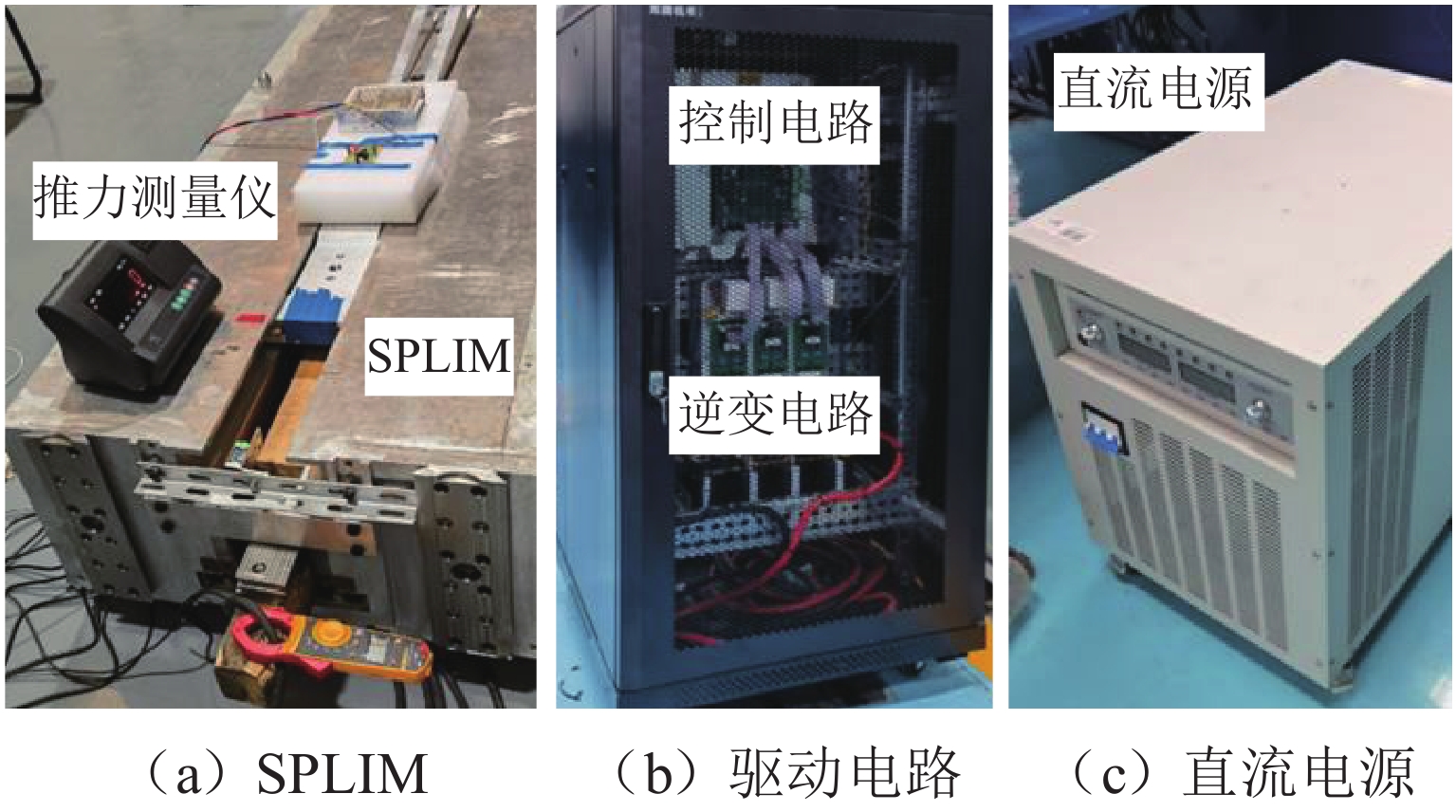
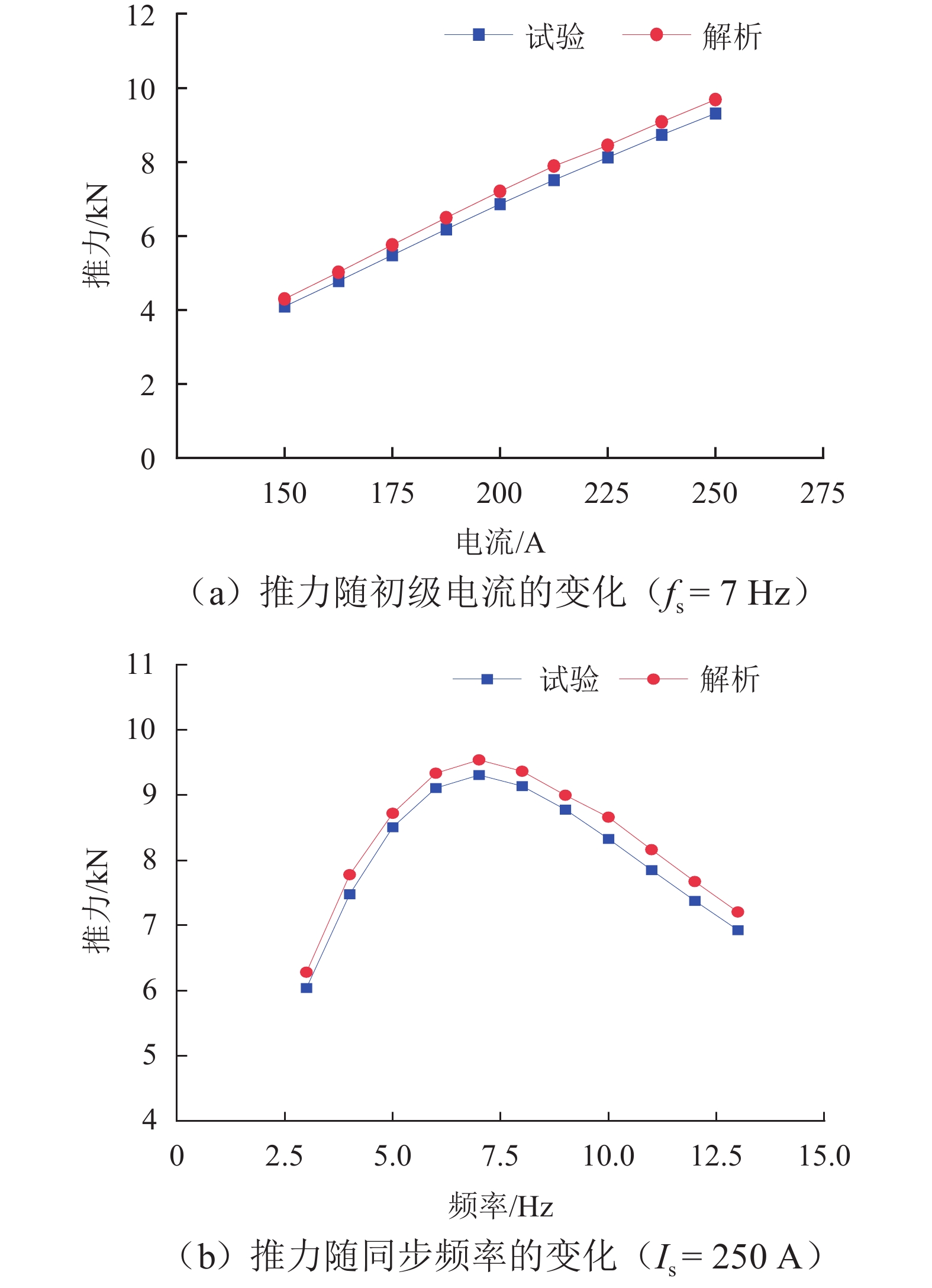
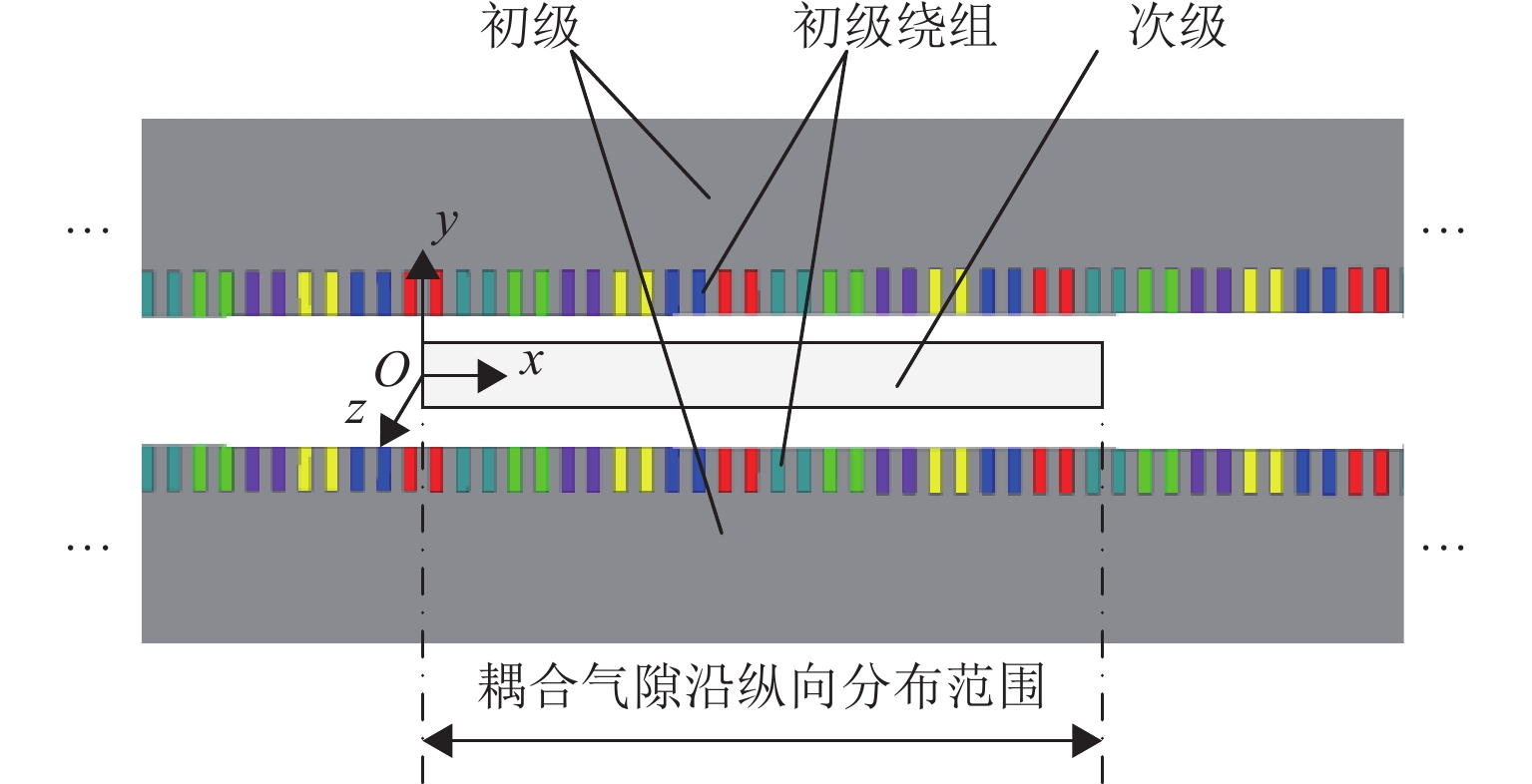
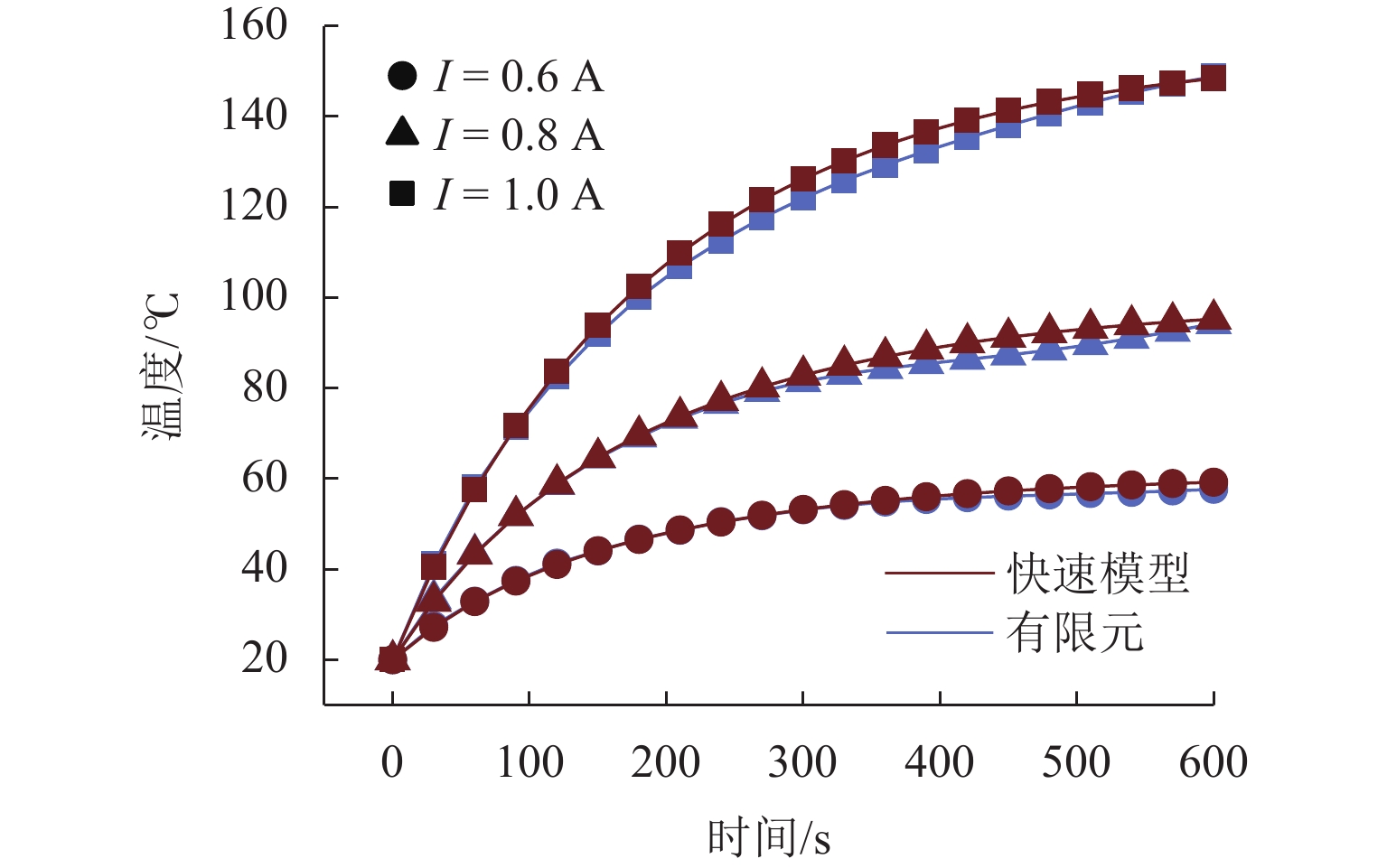
The short primary linear induction motor (SPLIM) contains both longitudinal dynamic end effect and core saturation effect during operation, and its equivalent electromagnetic parameters are difficult to be calculated accurately by the traditional analytical method due to the mutual coupling and nonlinear influence of these two effects. To this end, the analytical calculation method of the equivalent electromagnetic parameters of SPLIM under the influence of multi-factor coupling was proposed. Firstly, the improved equivalent circuit of SPLIM under the influence of multi-factor coupling was analyzed. Secondly, the one-dimensional electromagnetic field model of SPLIM and the magnetic circuit considering the core reluctance were established, and the differential equations of the air-gap flux density containing the speed factor and core permeability were derived according to Ampère’s circuital law. The air-gap flux density at each position was calculated by the iterative method and the core magnetization curves. Next, the excitation inductance and secondary resistance under different operating conditions were calculated according to the magnetic chain method and the equivalent loss method, respectively. Finally, a transient field simulation model of SPLIM was established in ANSYS Maxwell. Results reveal that the maximum error between the analytical results for excitation inductance and the finite element results is 6.8%, while the maximum error between the analytical results for secondary resistance and the finite element results is 6.4%. The thrust calculated based on equivalent parameters is in good agreement with the experimental data, further validating the accuracy of the proposed analytical method.
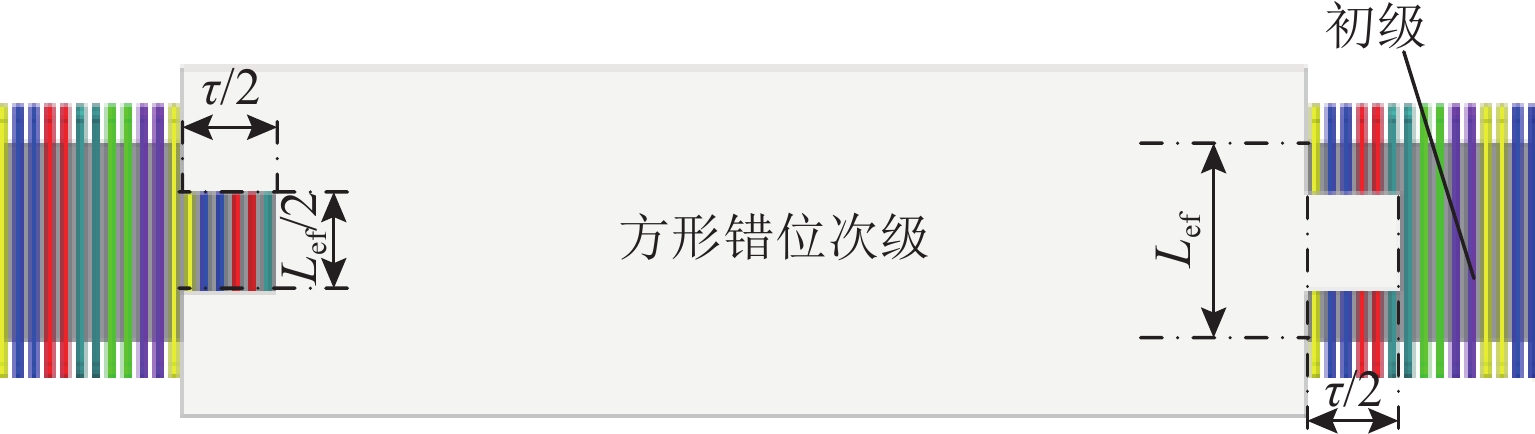
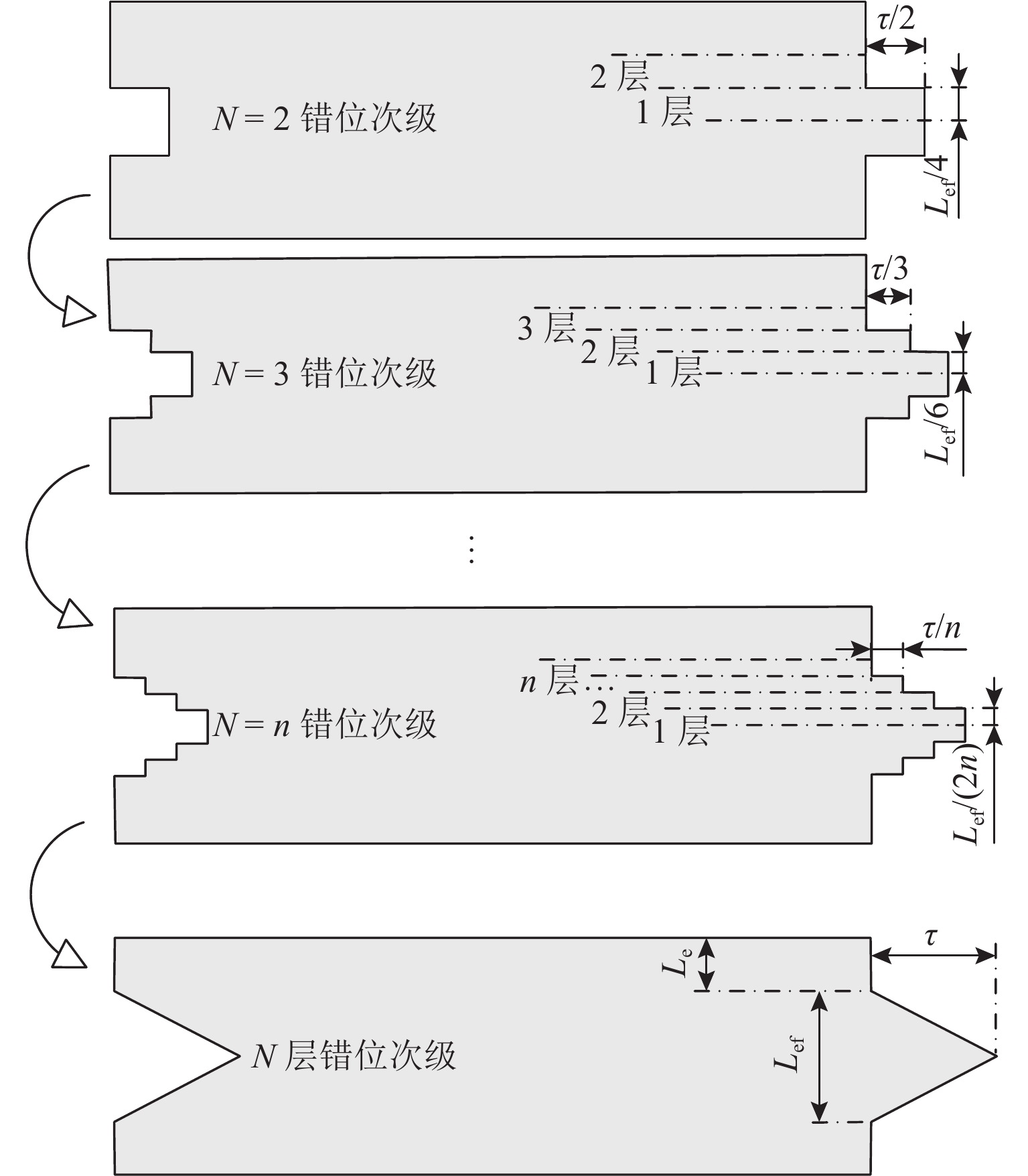
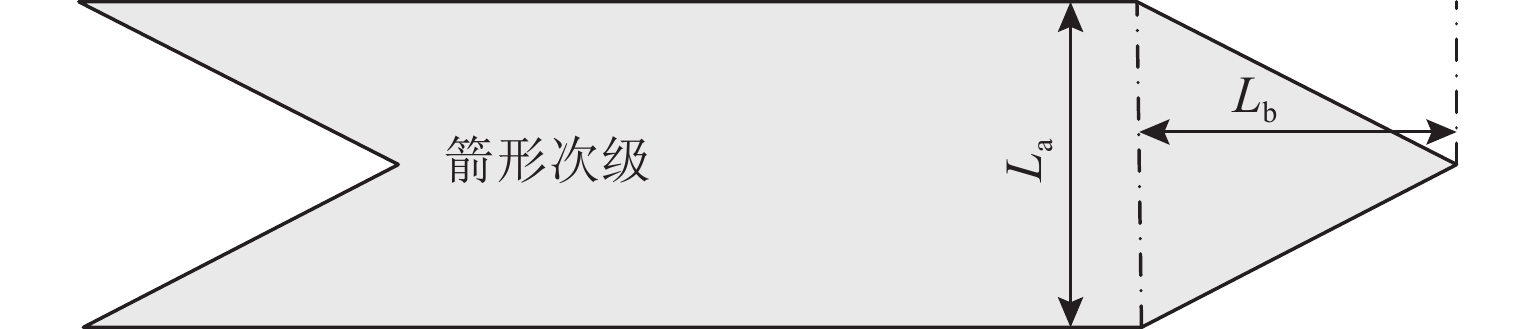
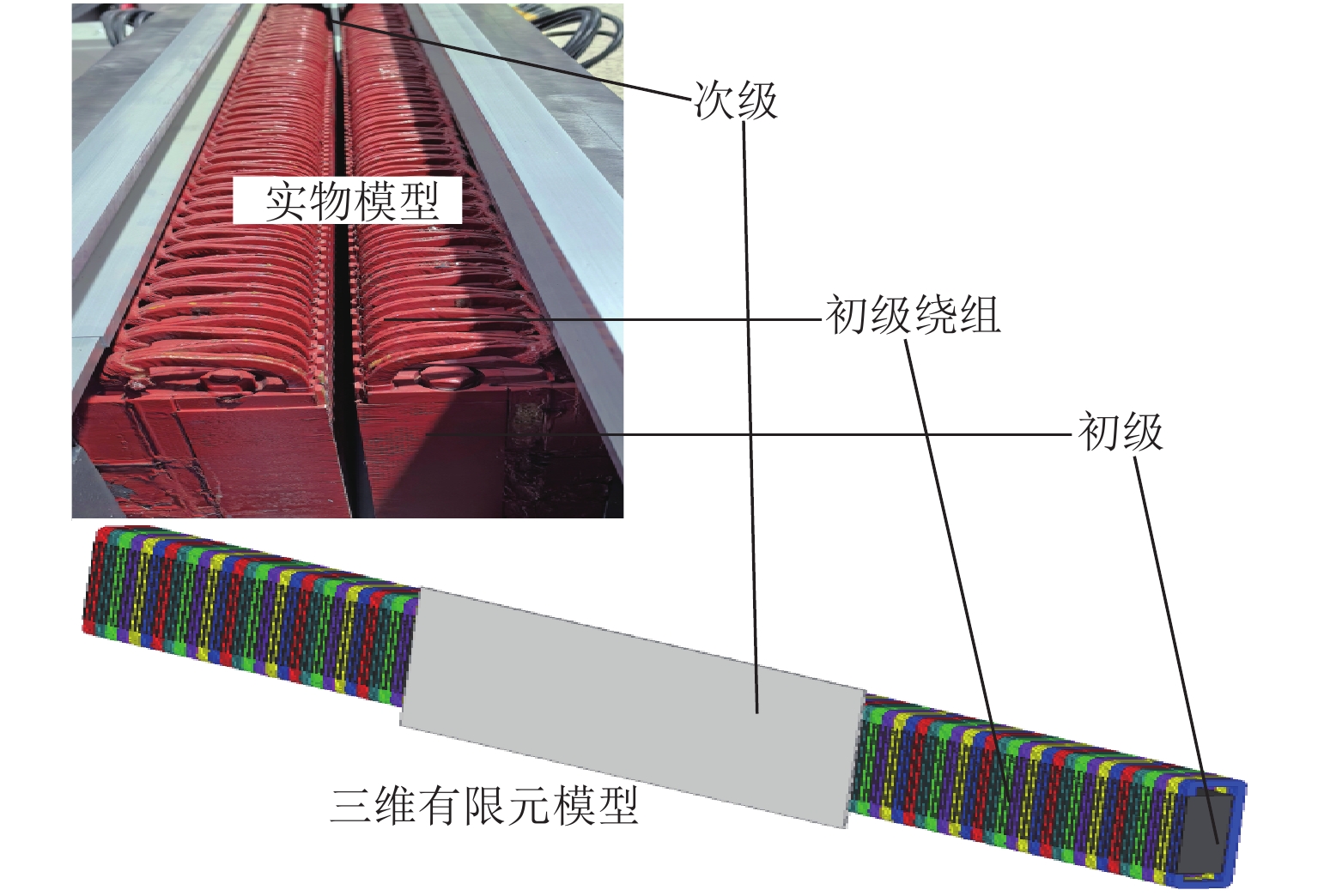
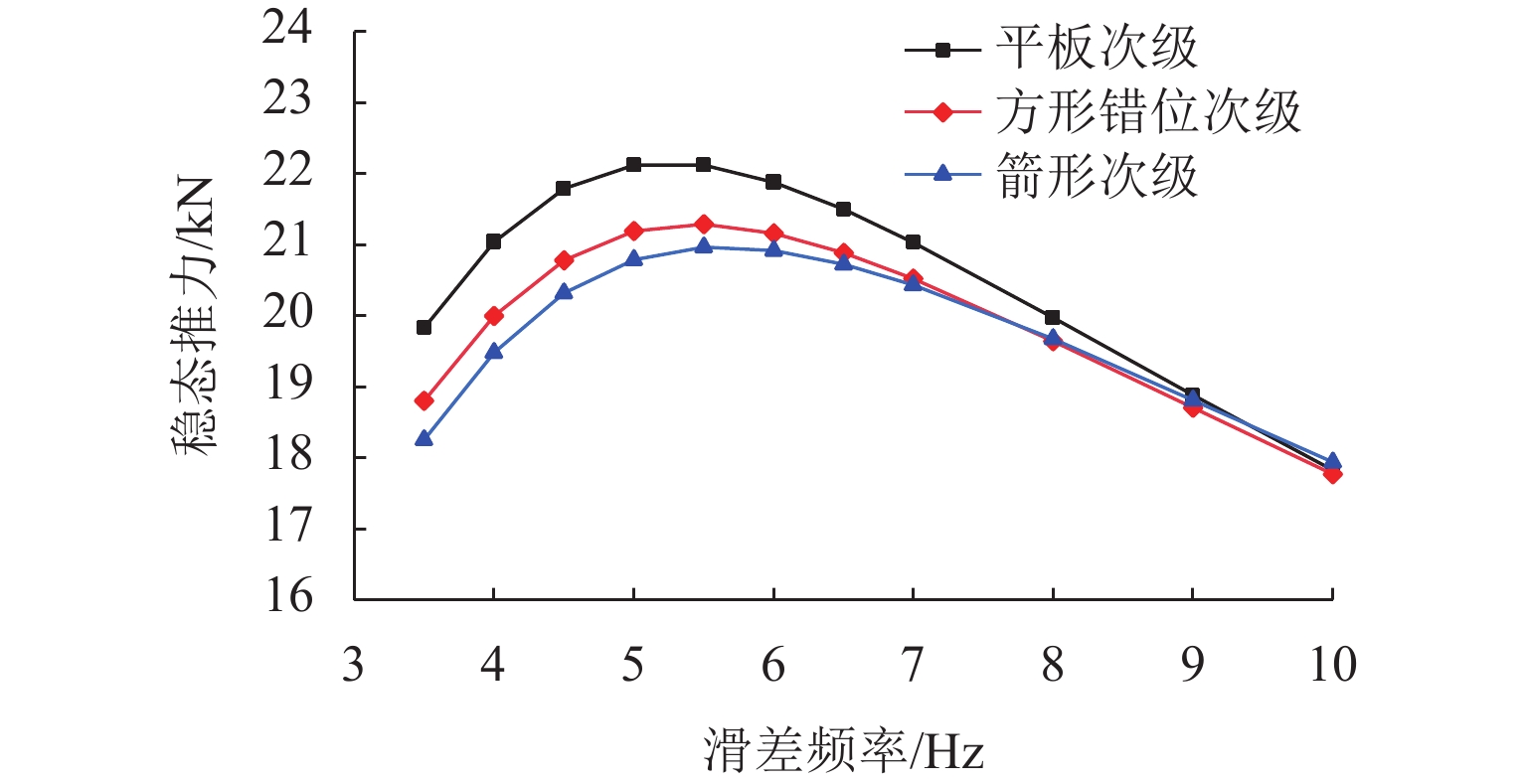
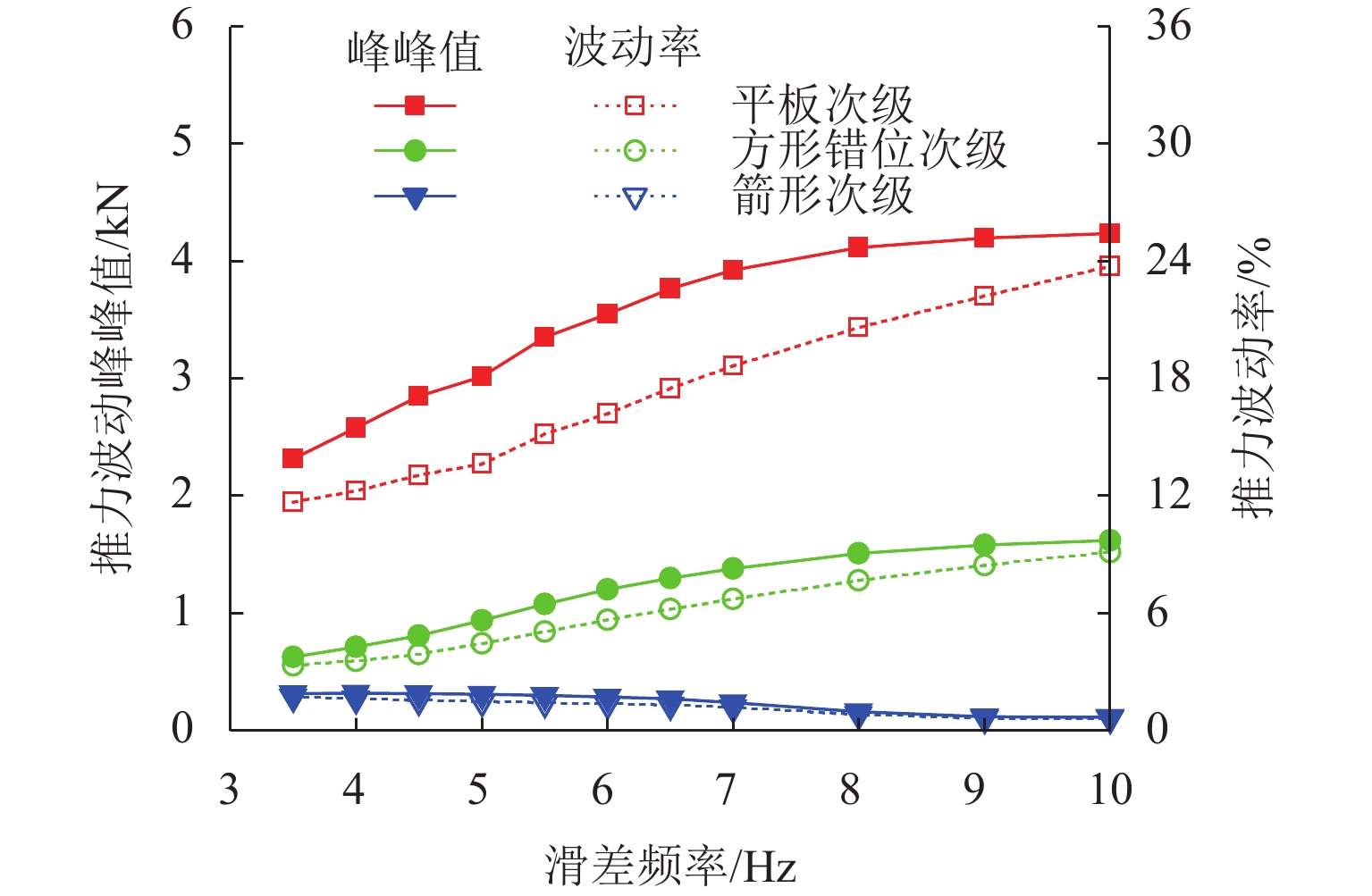
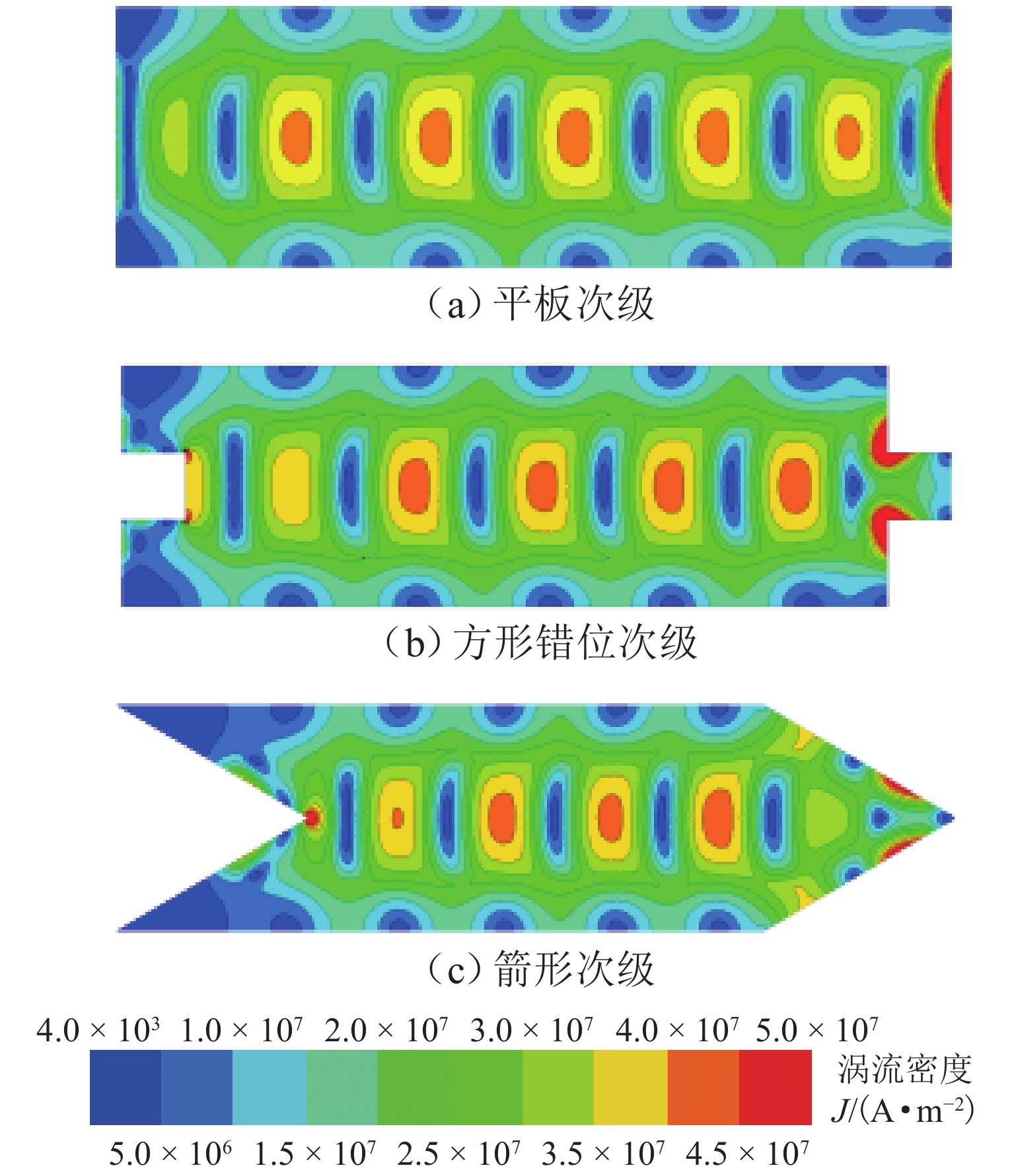
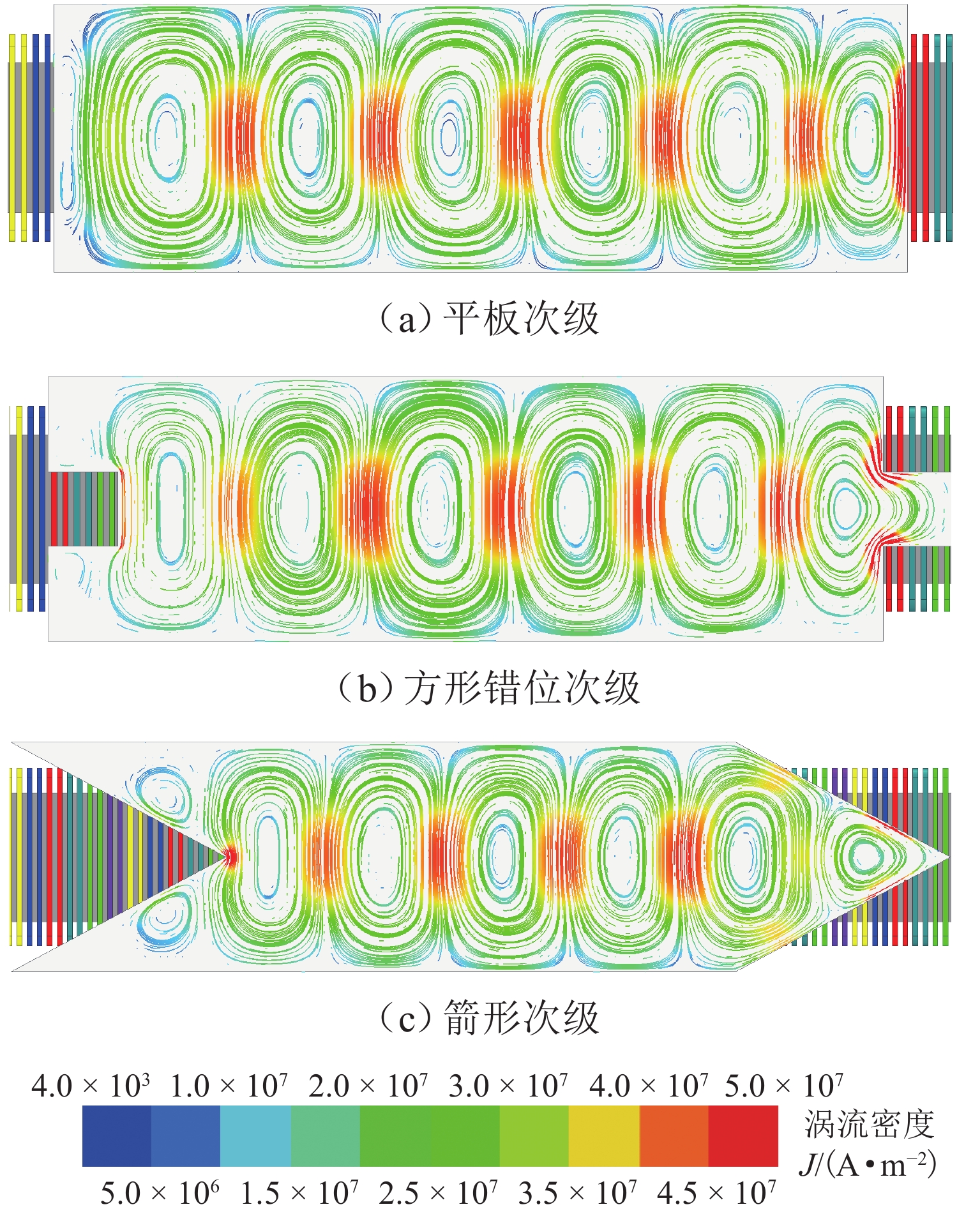
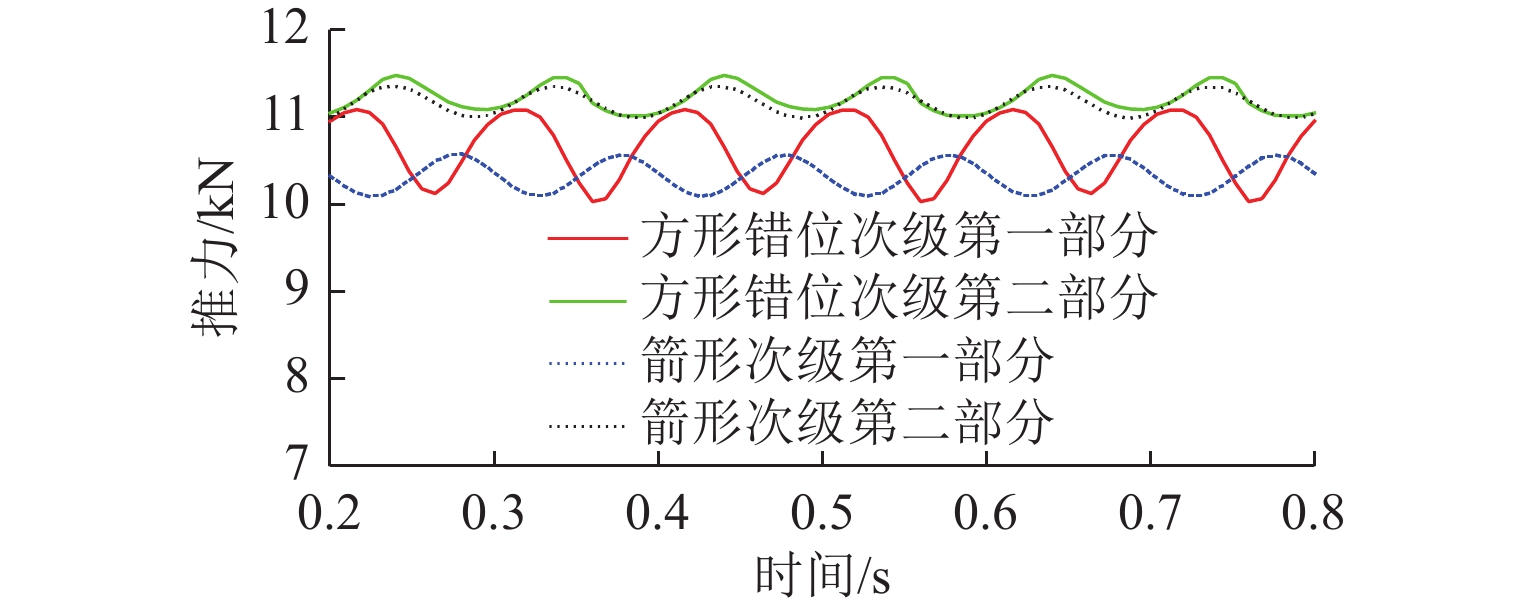
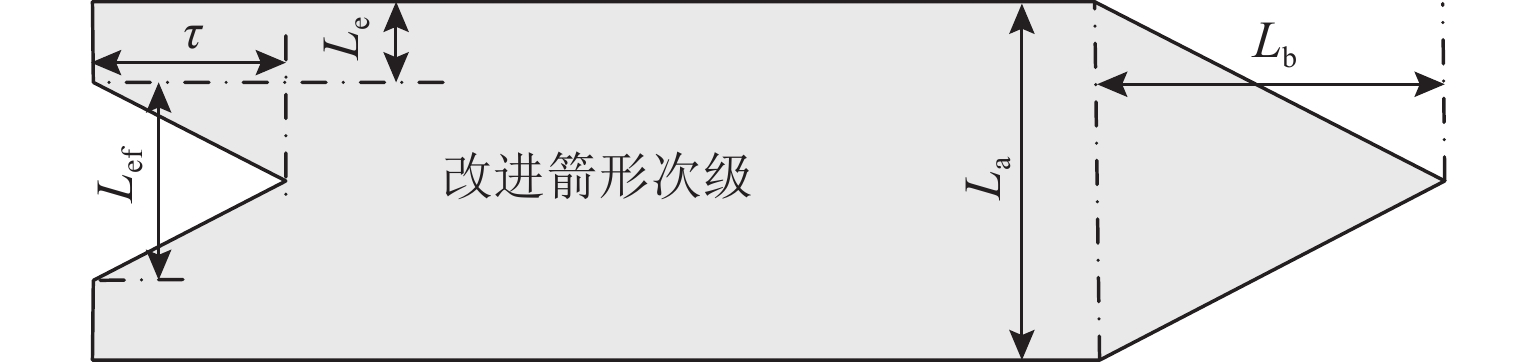
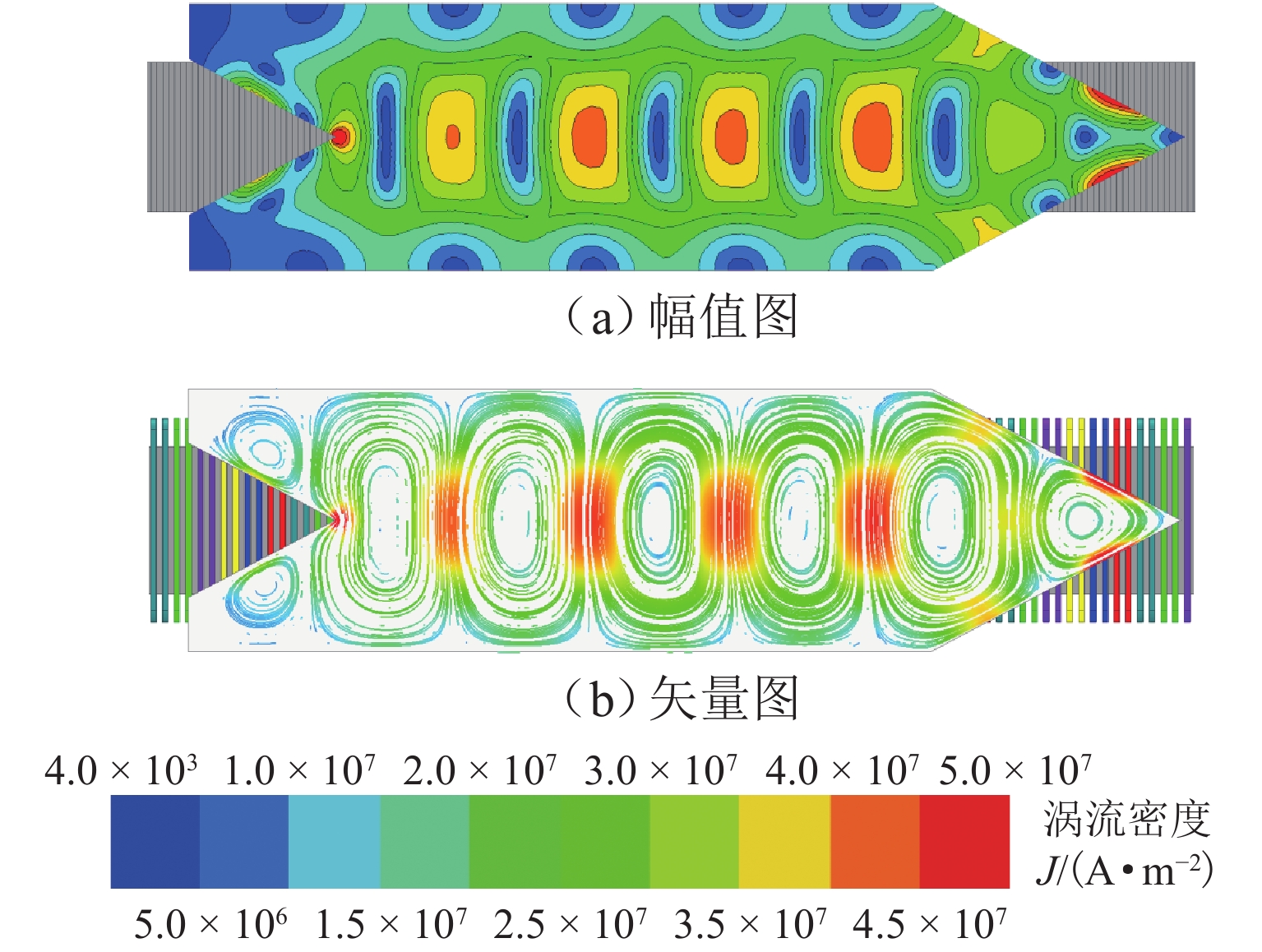
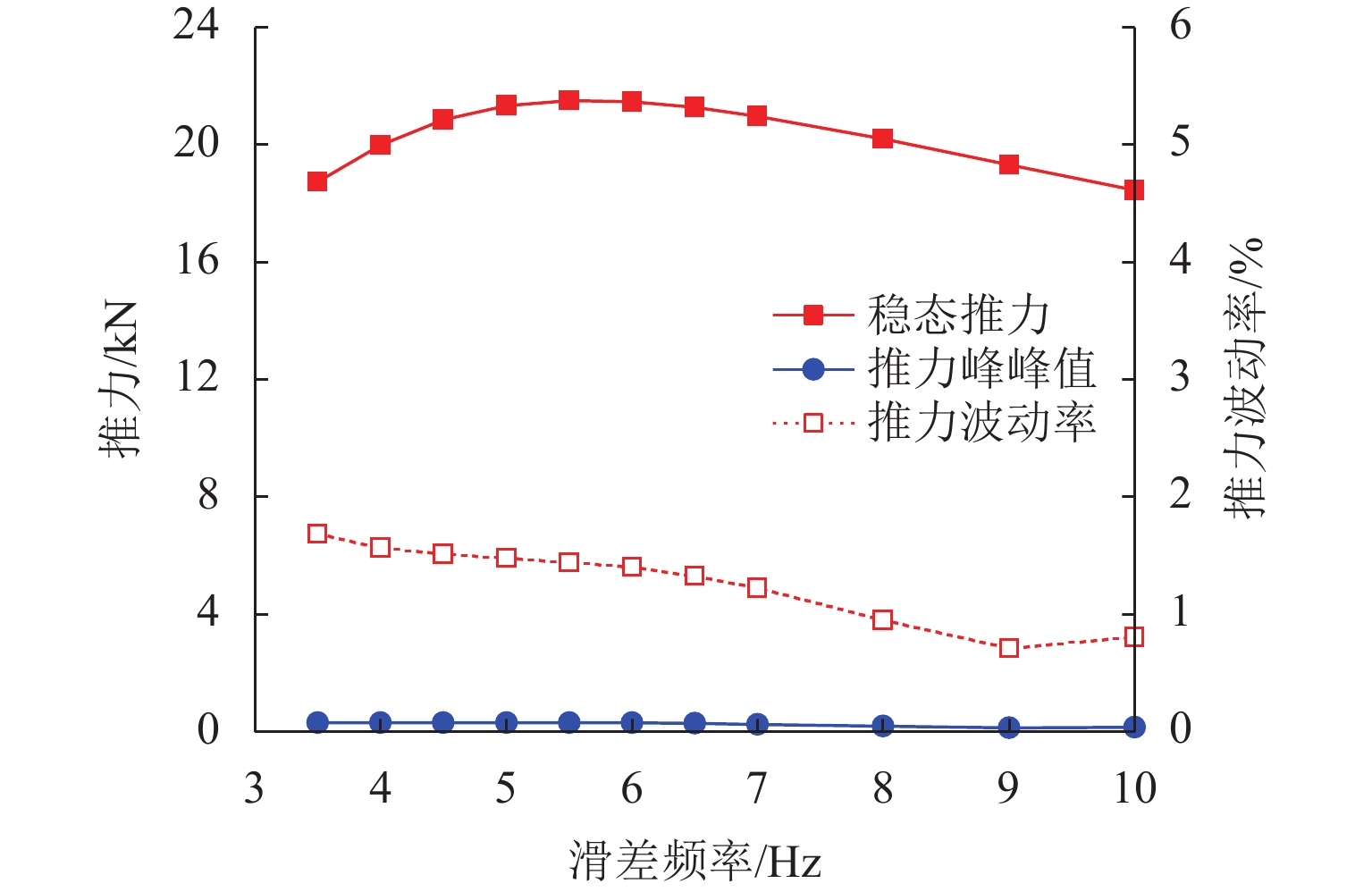
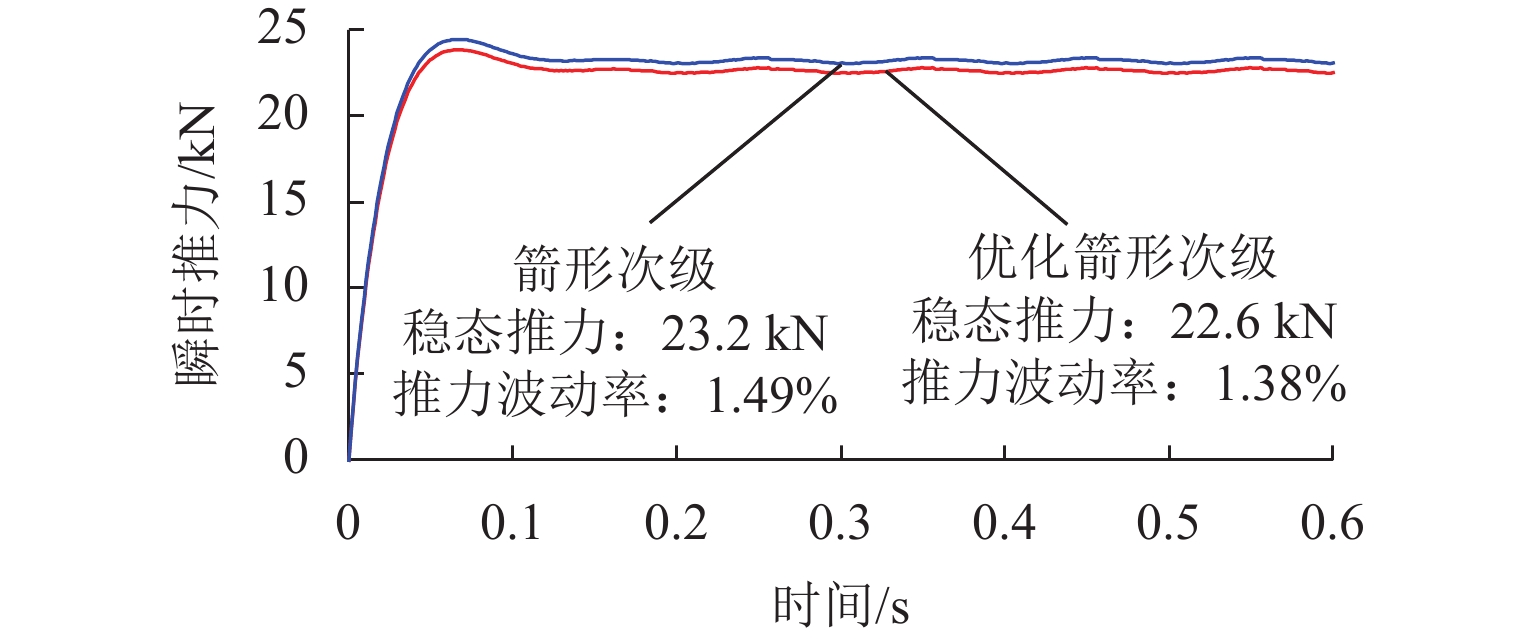
The system vibration caused by thrust ripple in double-sided linear induction motor (DSLIM) is an urgent problem to be solved in precision control fields such as high-speed electromagnetic propulsion, rail transit, and industrial drives. An in-depth study on the secondary structure of DSLIMs was conducted, and an arrow-shaped secondary design was proposed to reduce thrust ripple. First, the key shape parameters of the arrow-shaped secondary design were derived. Three-dimensional finite element models of DSLIMs incorporating flat, square-misaligned, and arrow-shaped secondary designs were established to analyze their thrust output characteristics. Then, the eddy current distribution features and layered thrust distribution characteristics of different secondary structures were compared to elucidate the mechanism of thrust ripple suppression by the arrow-shaped secondary design. Finally, the thrust of the arrow-shaped secondary structure before and after optimization under motion conditions was compared using a three-dimensional transient finite element model. The results indicate that the optimized arrow-shaped secondary design improves the utilization of secondary conductors and enhances the thrust ripple suppression effect by optimizing the eddy current path in the end regions. In the region near the operational slip, the thrust ripple rate can be reduced to below 2%, and the thrust under the same mass can reach 21.51 kN, representing an increase of 1.03% compared with the square-misaligned secondary design.
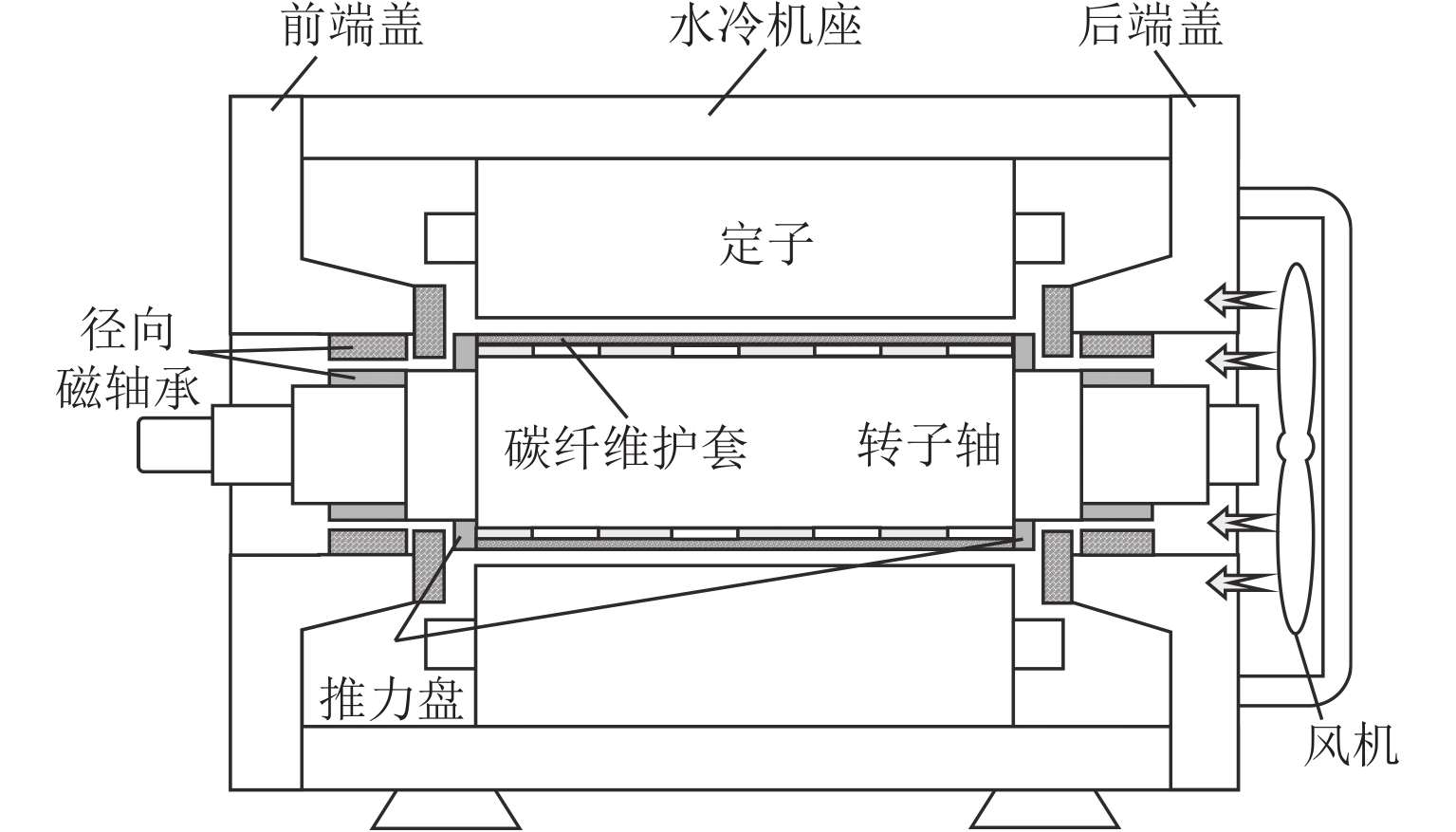
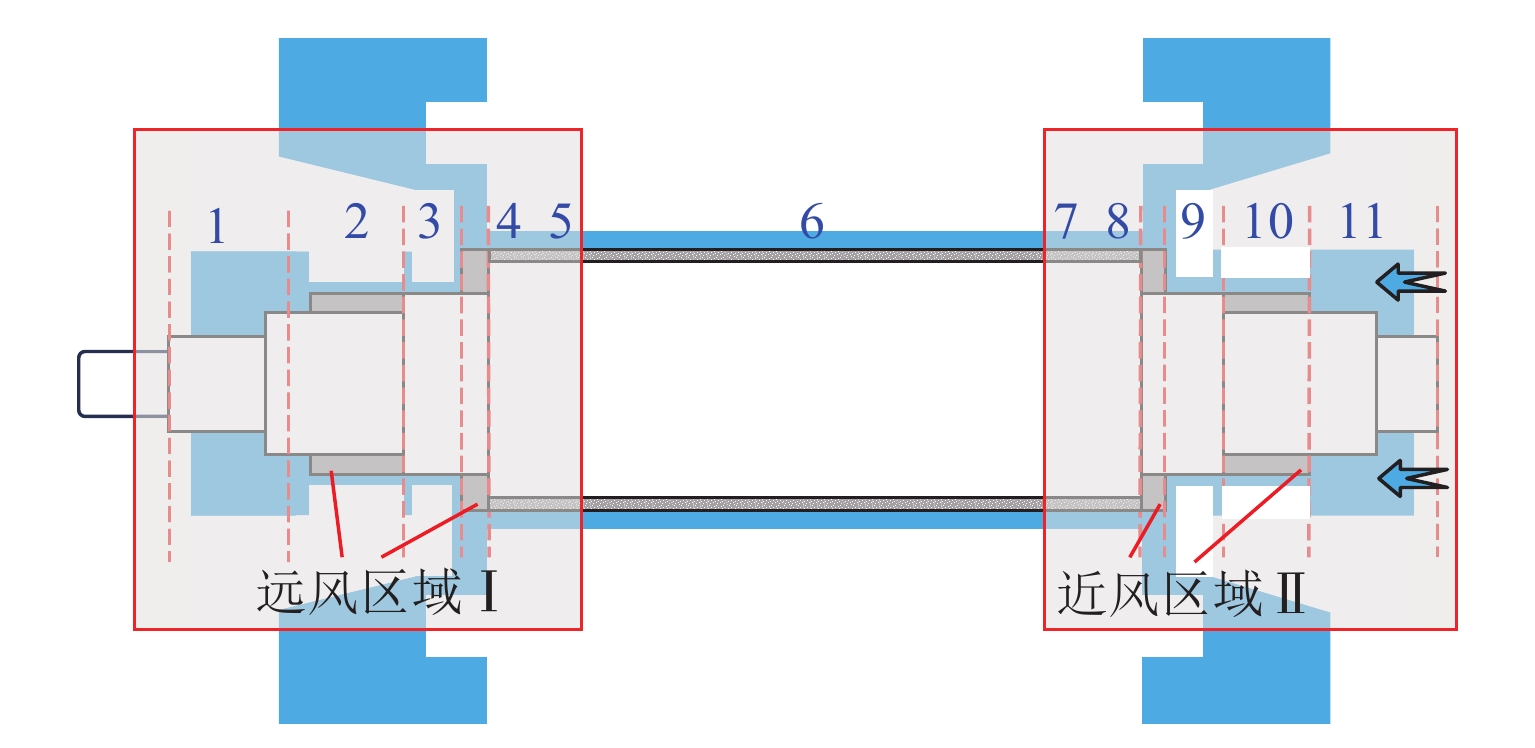
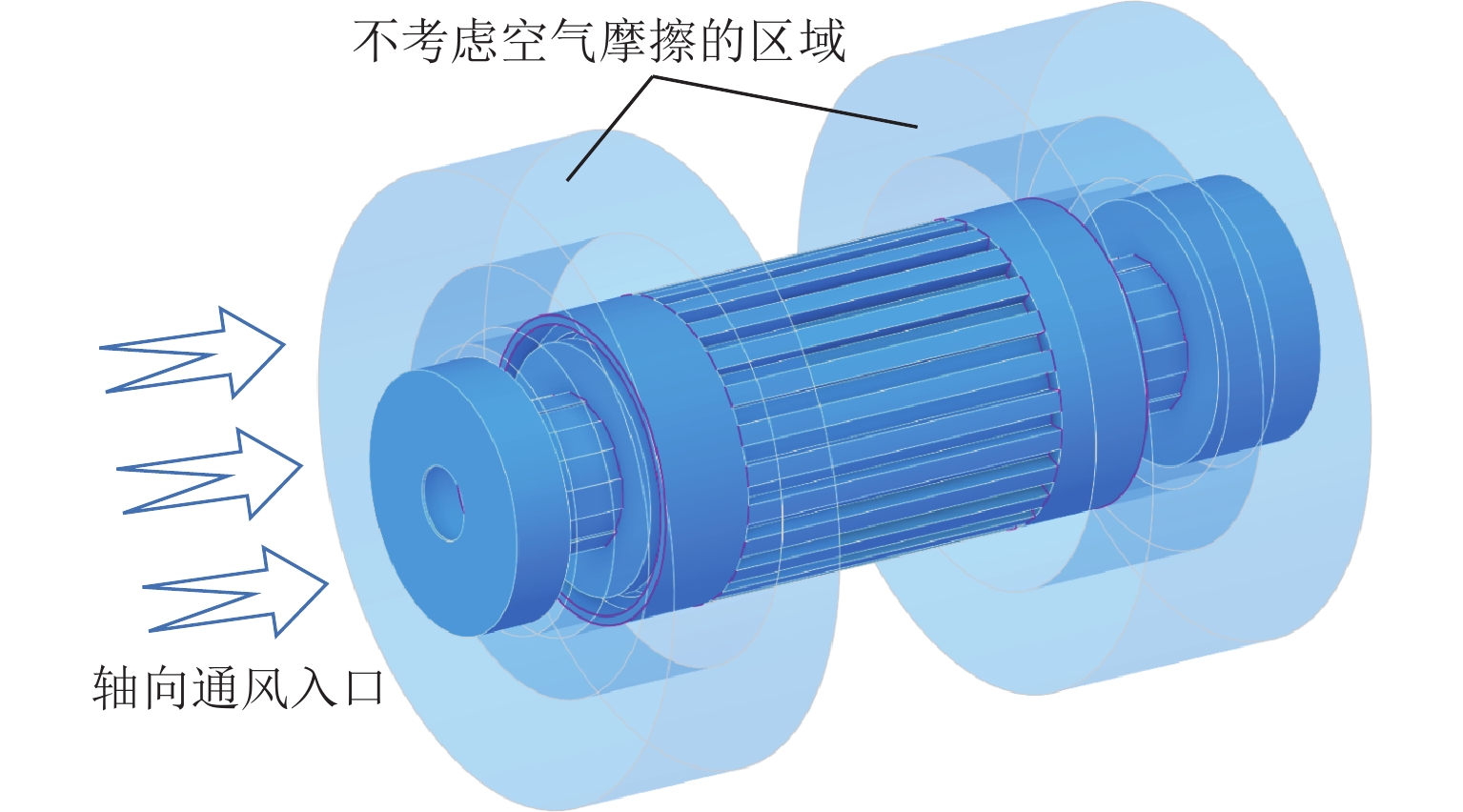
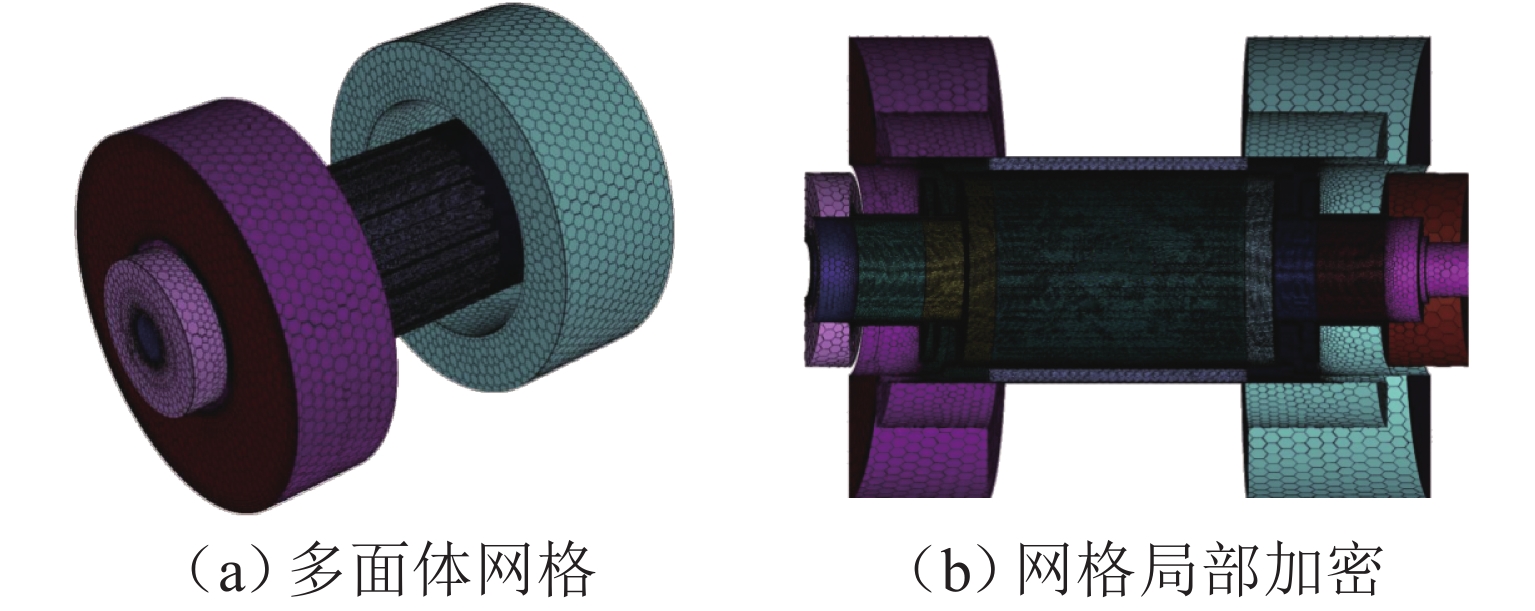
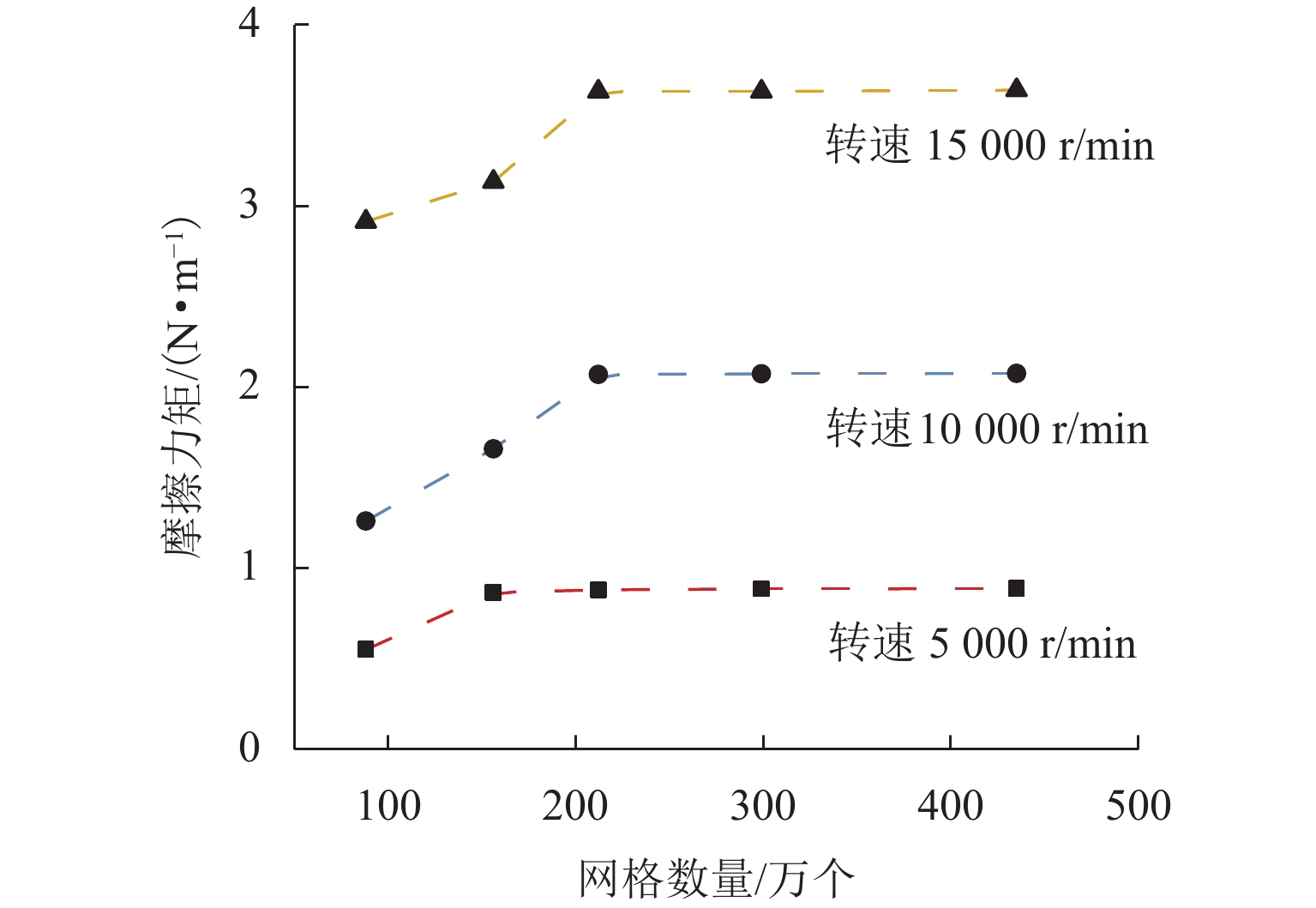
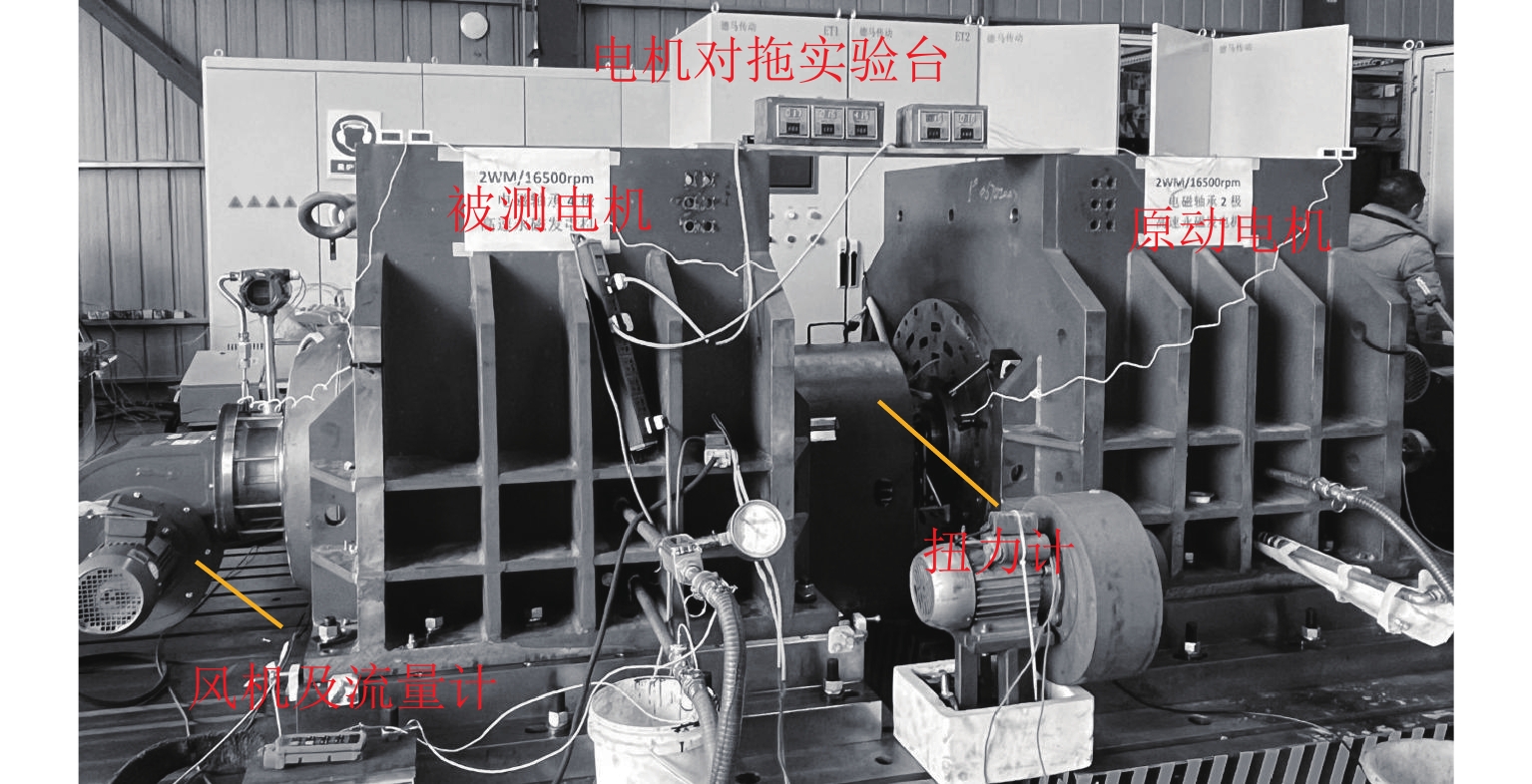
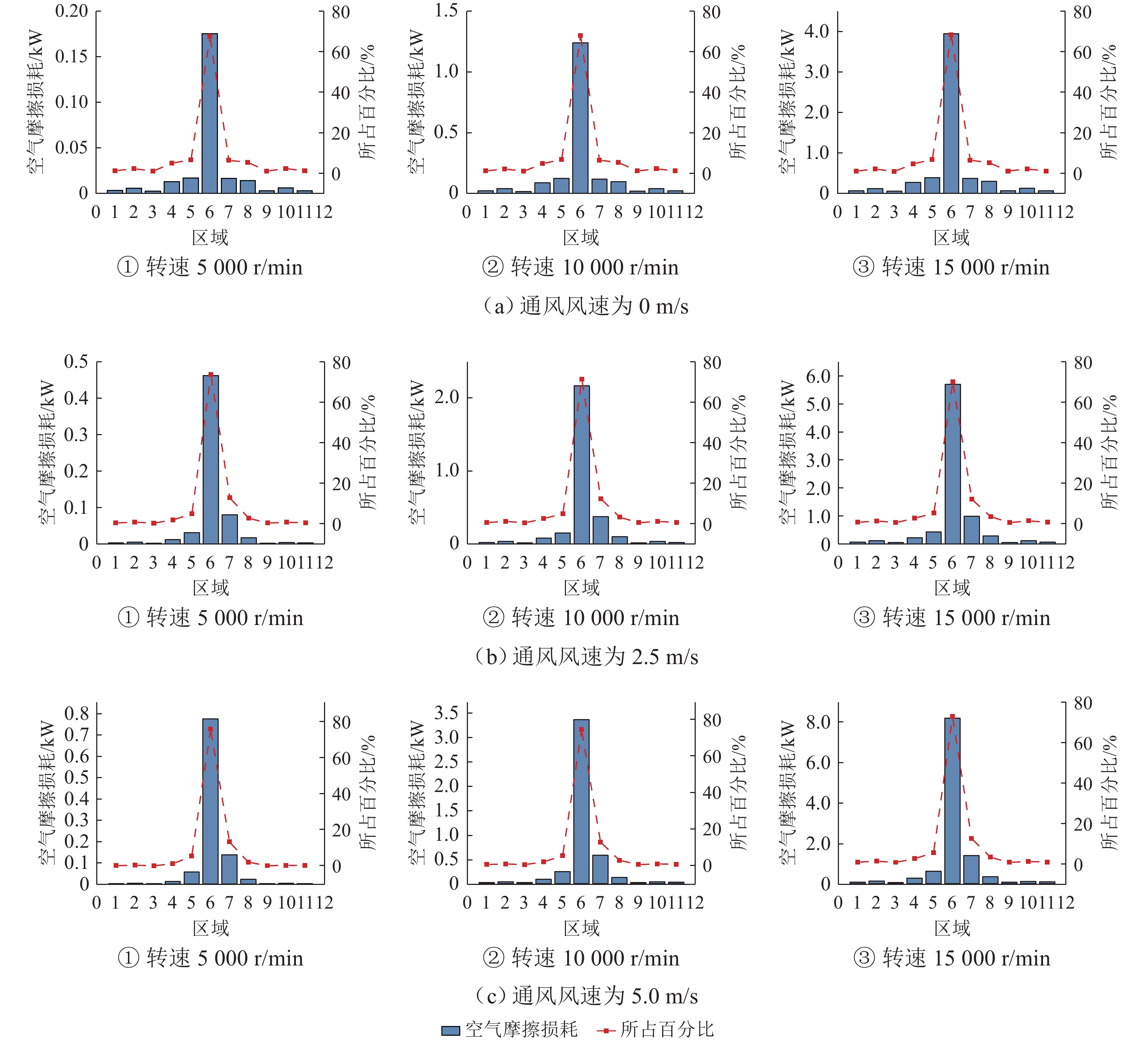
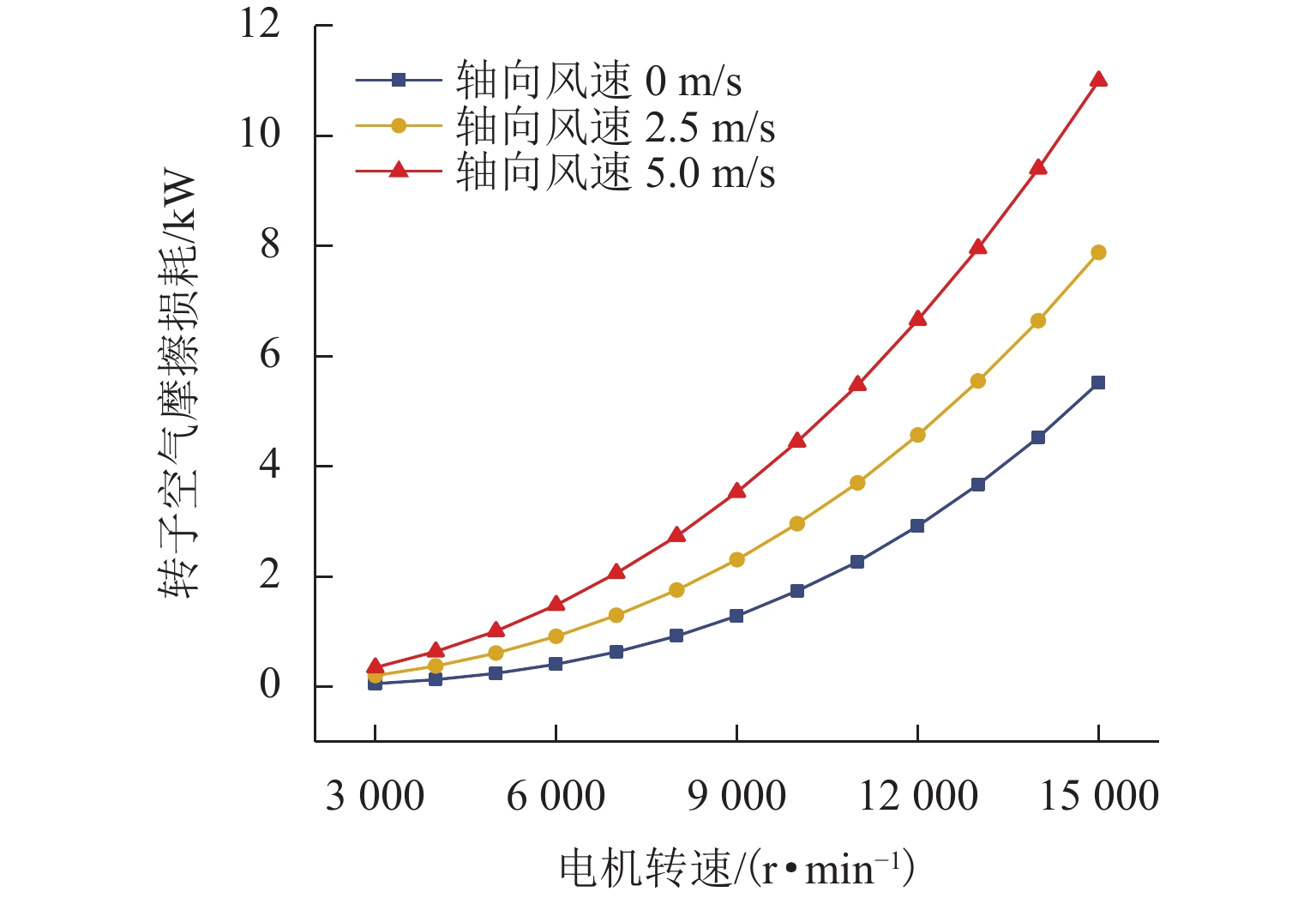
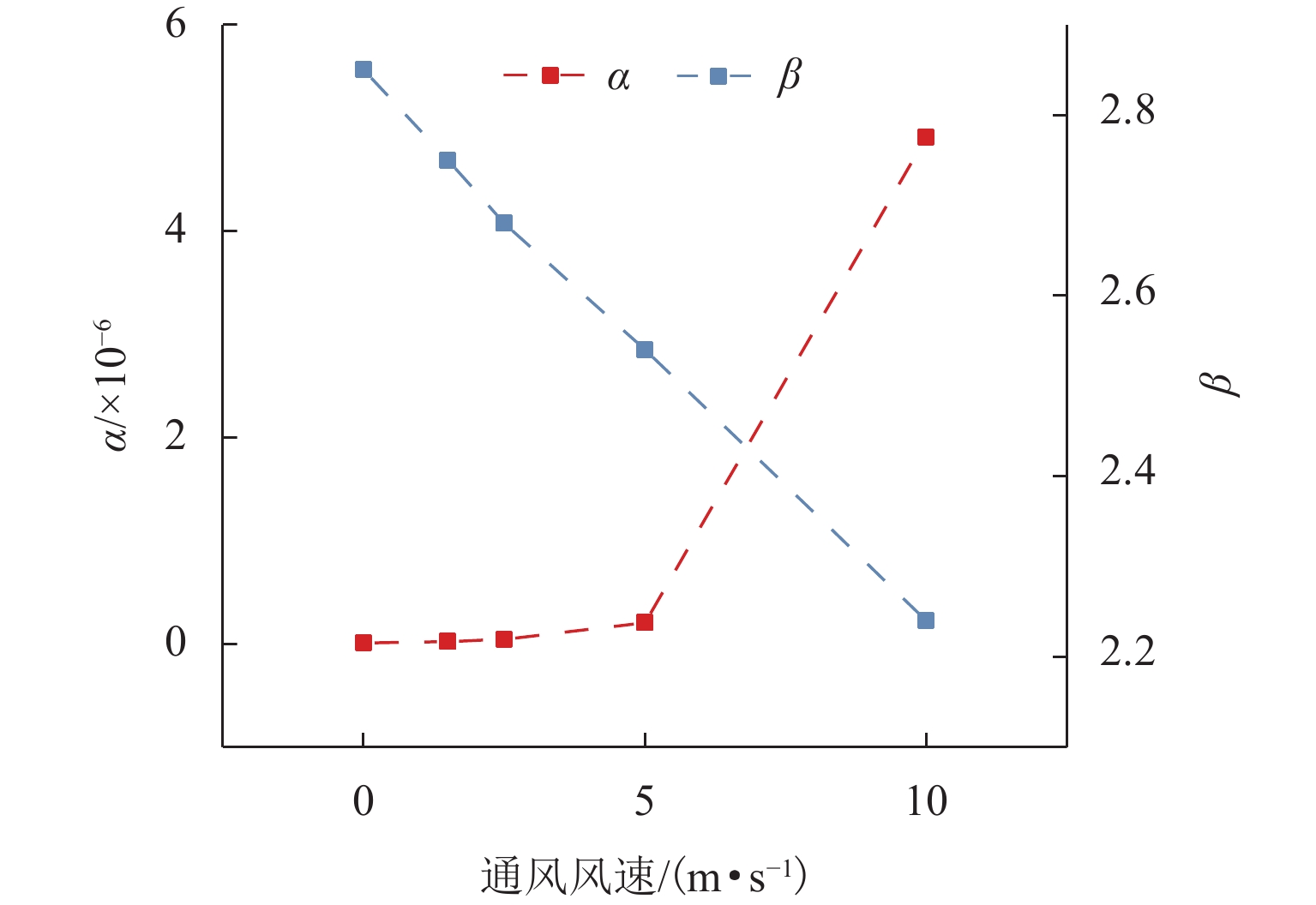
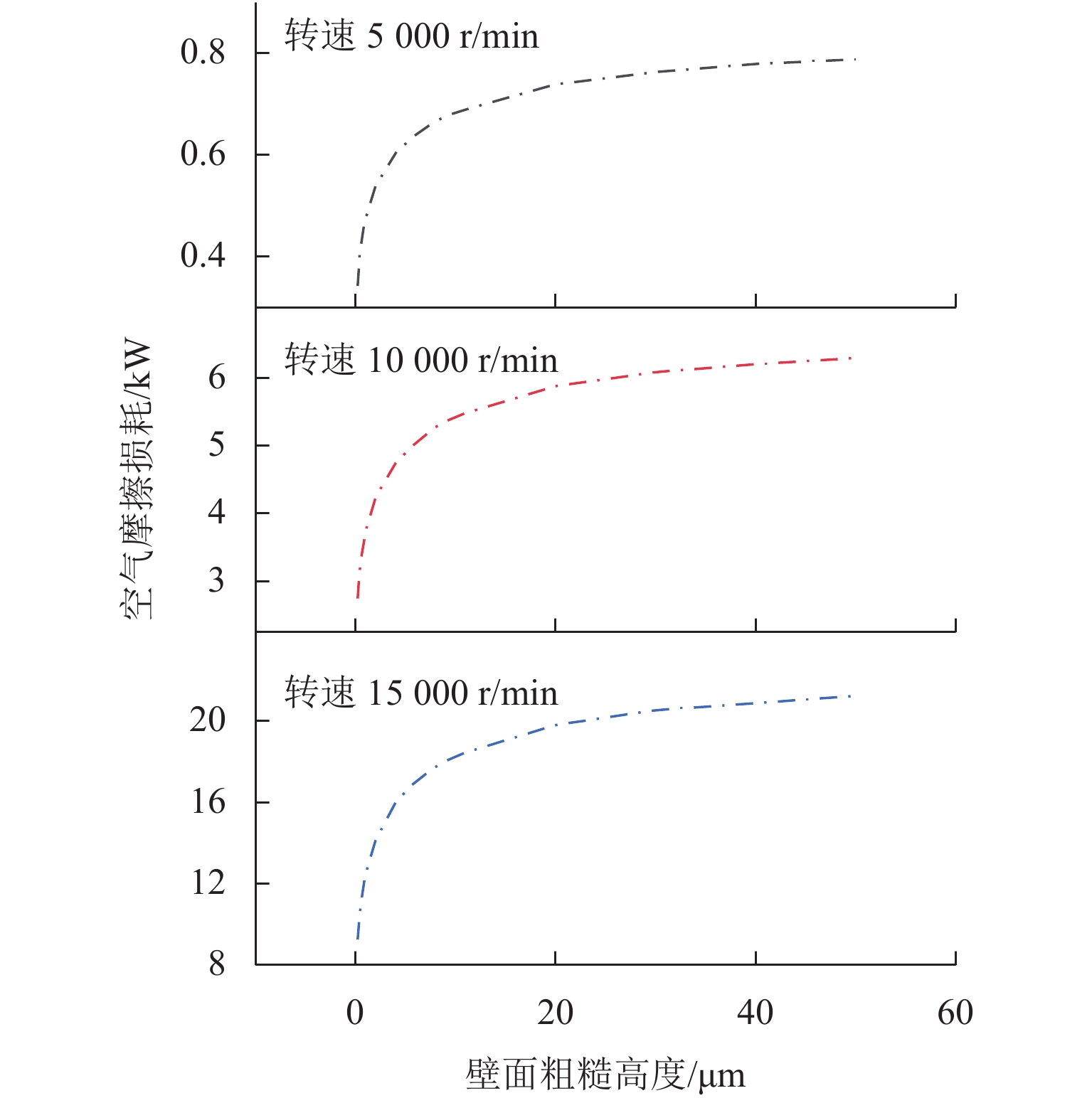
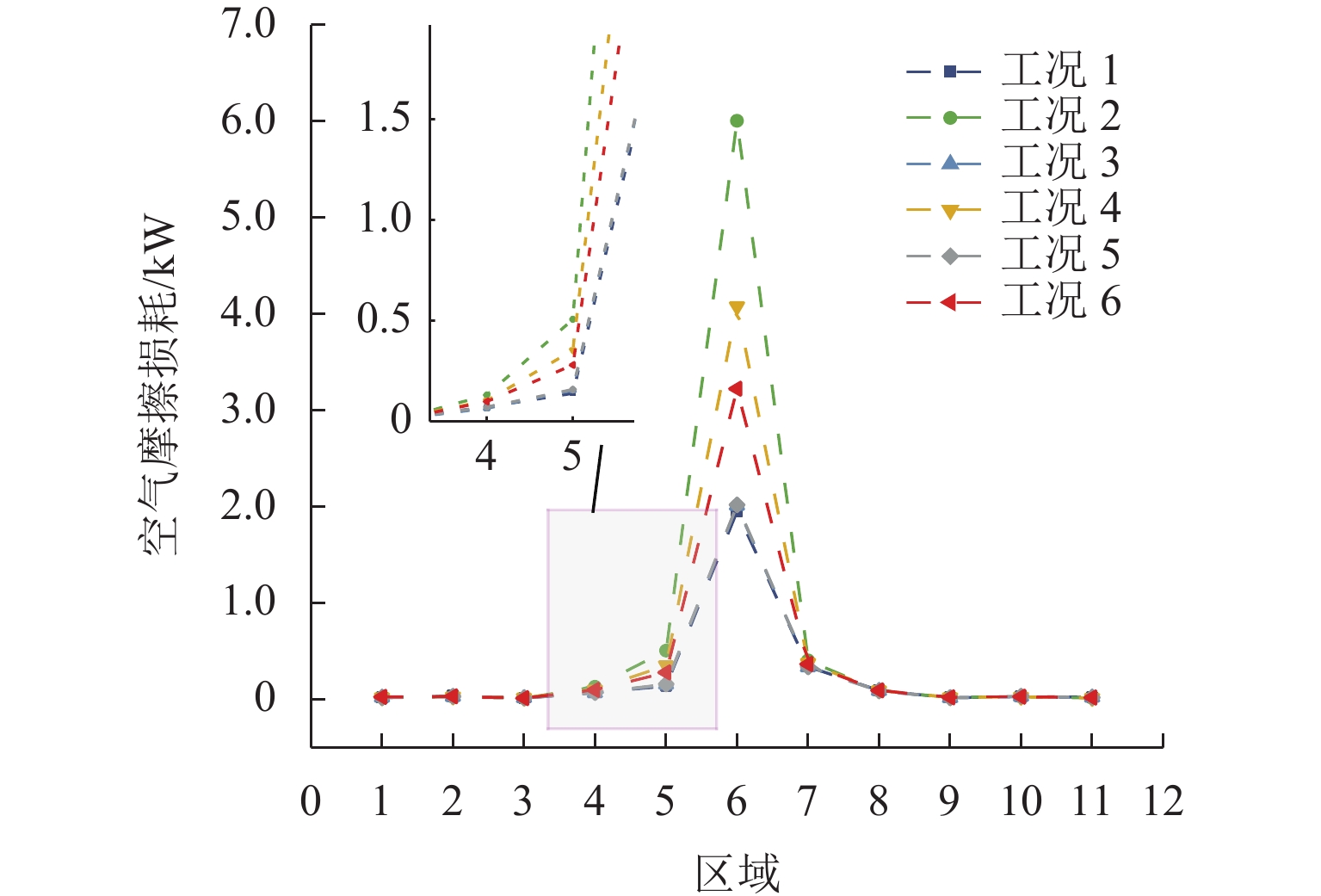
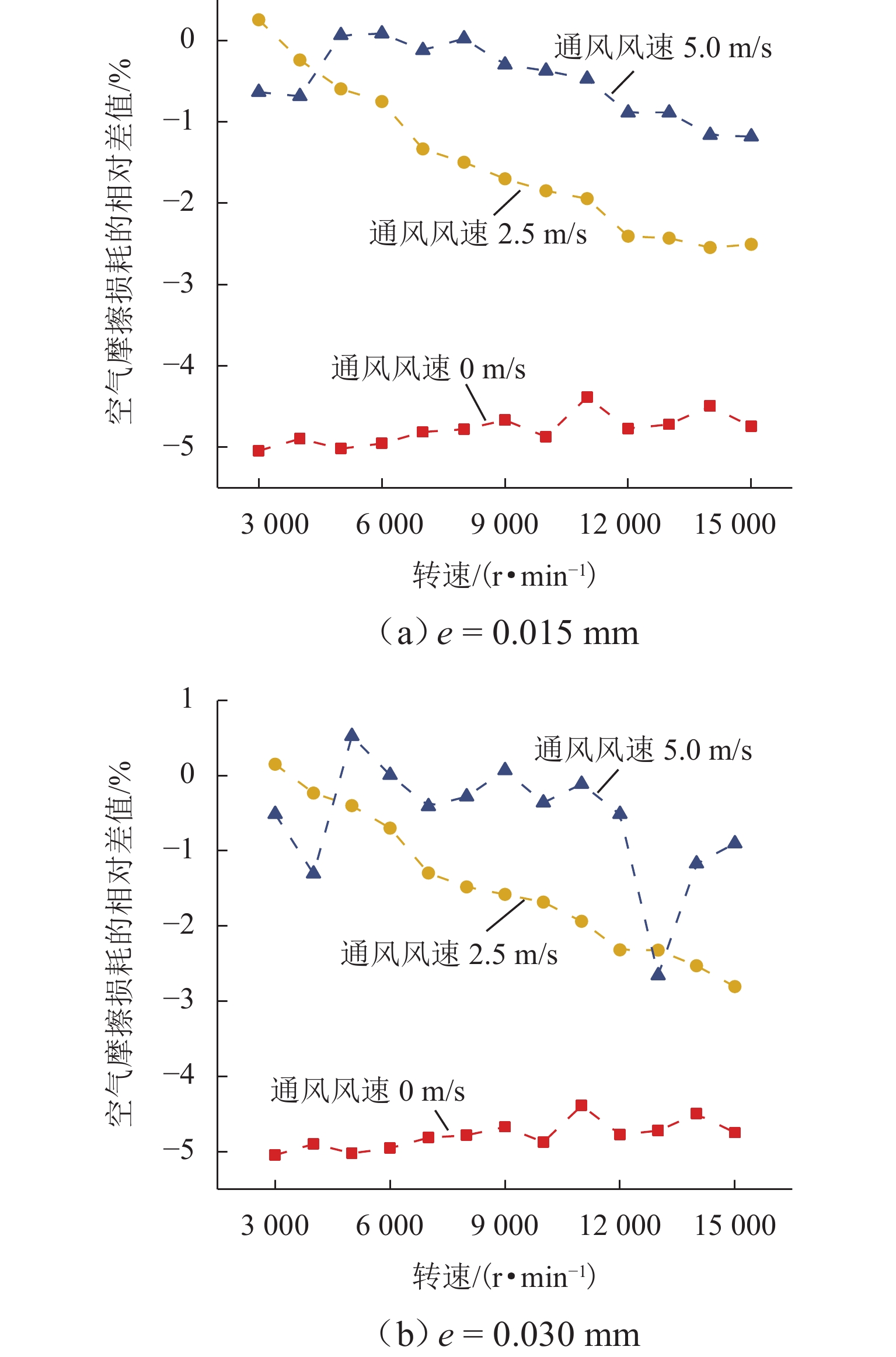
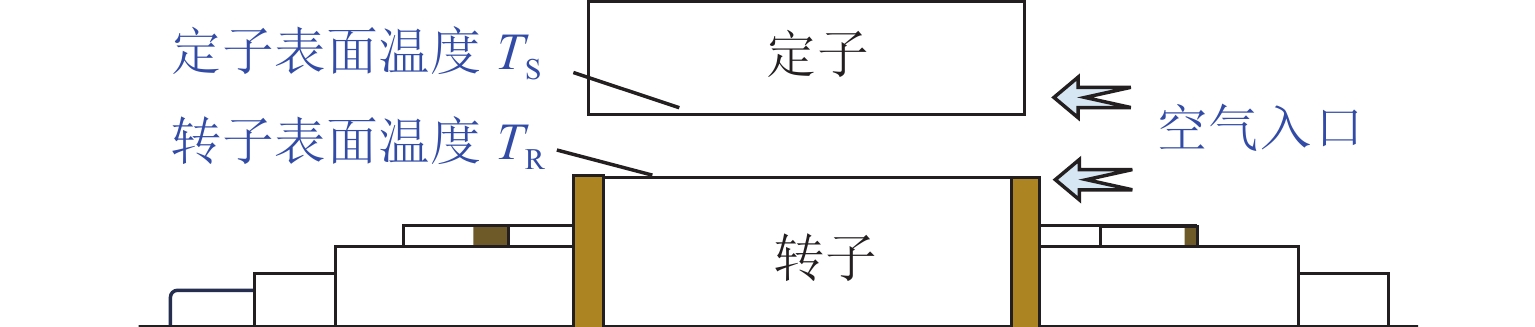
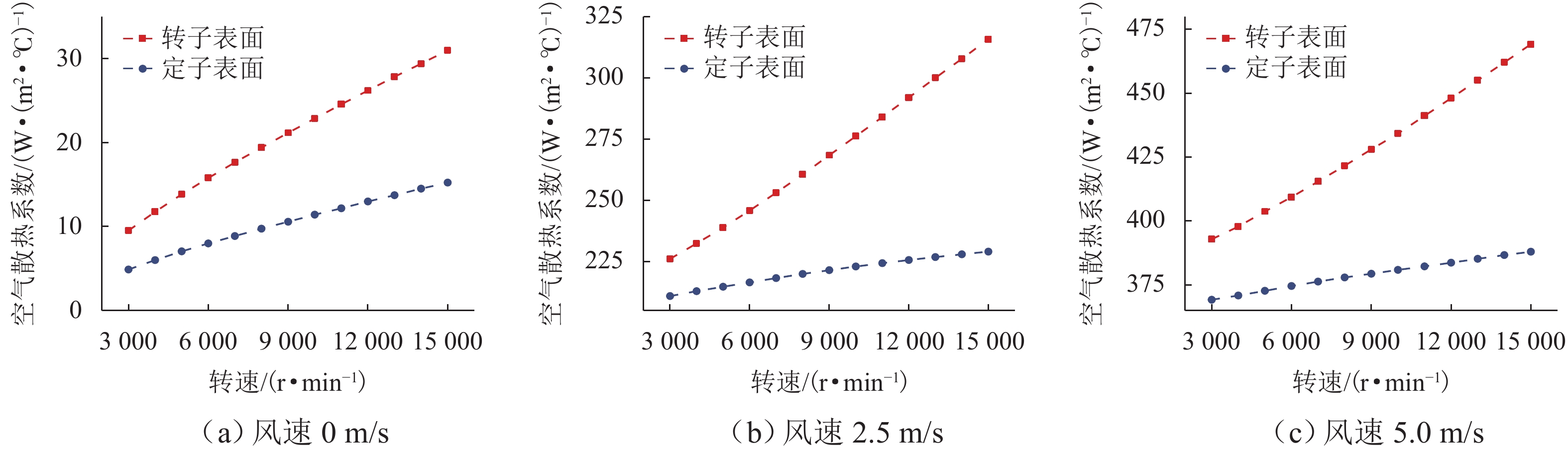
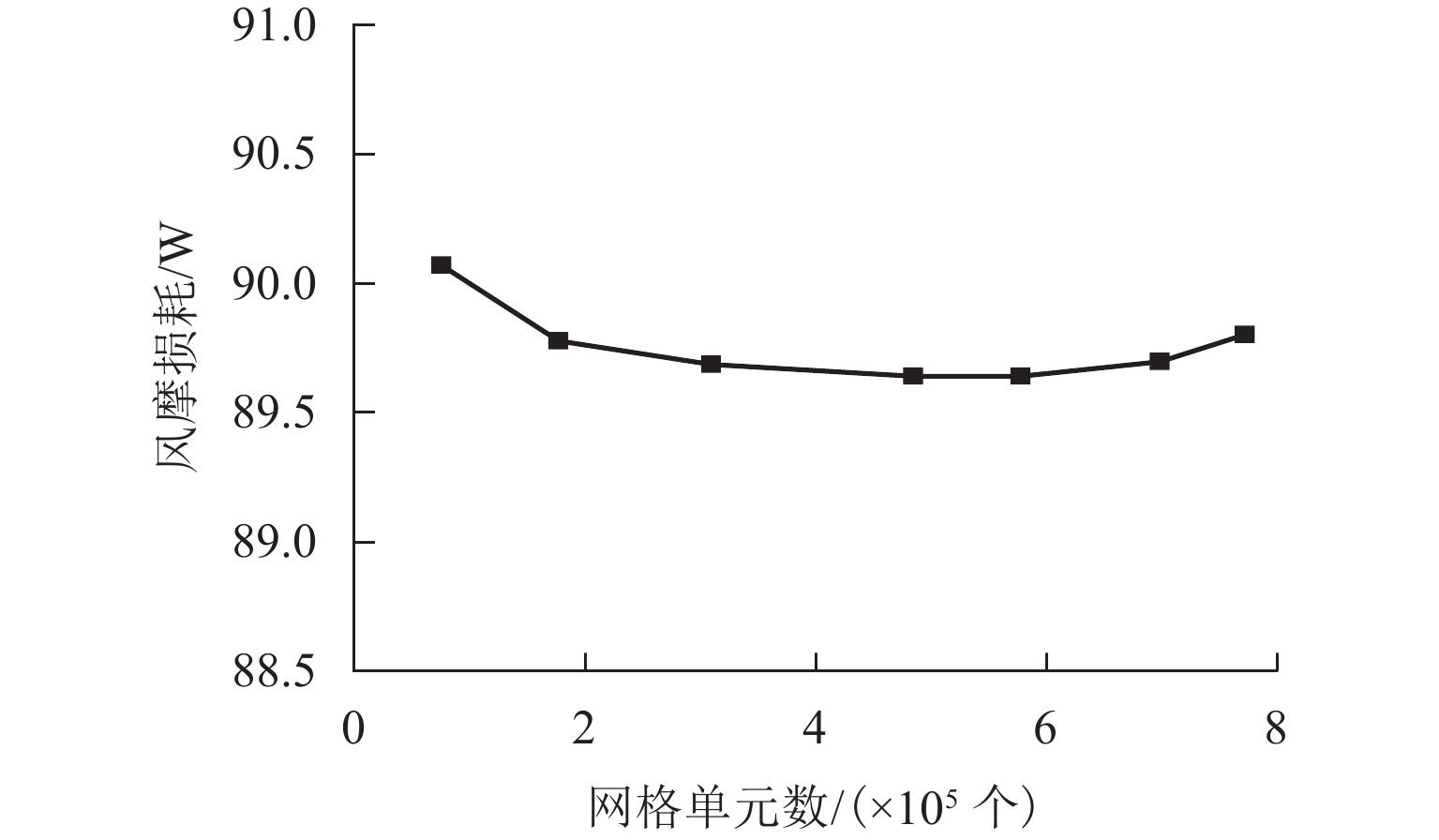
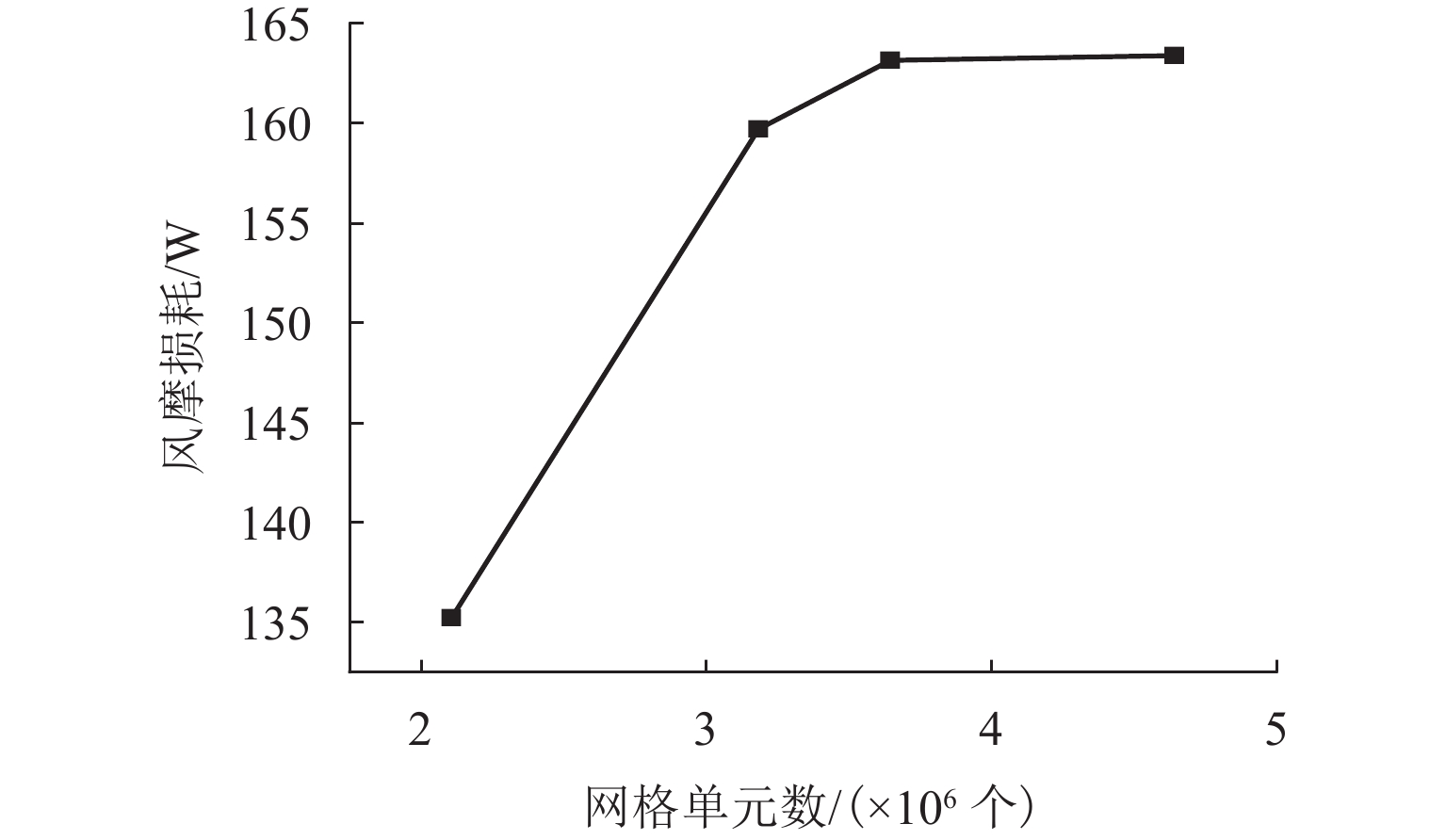
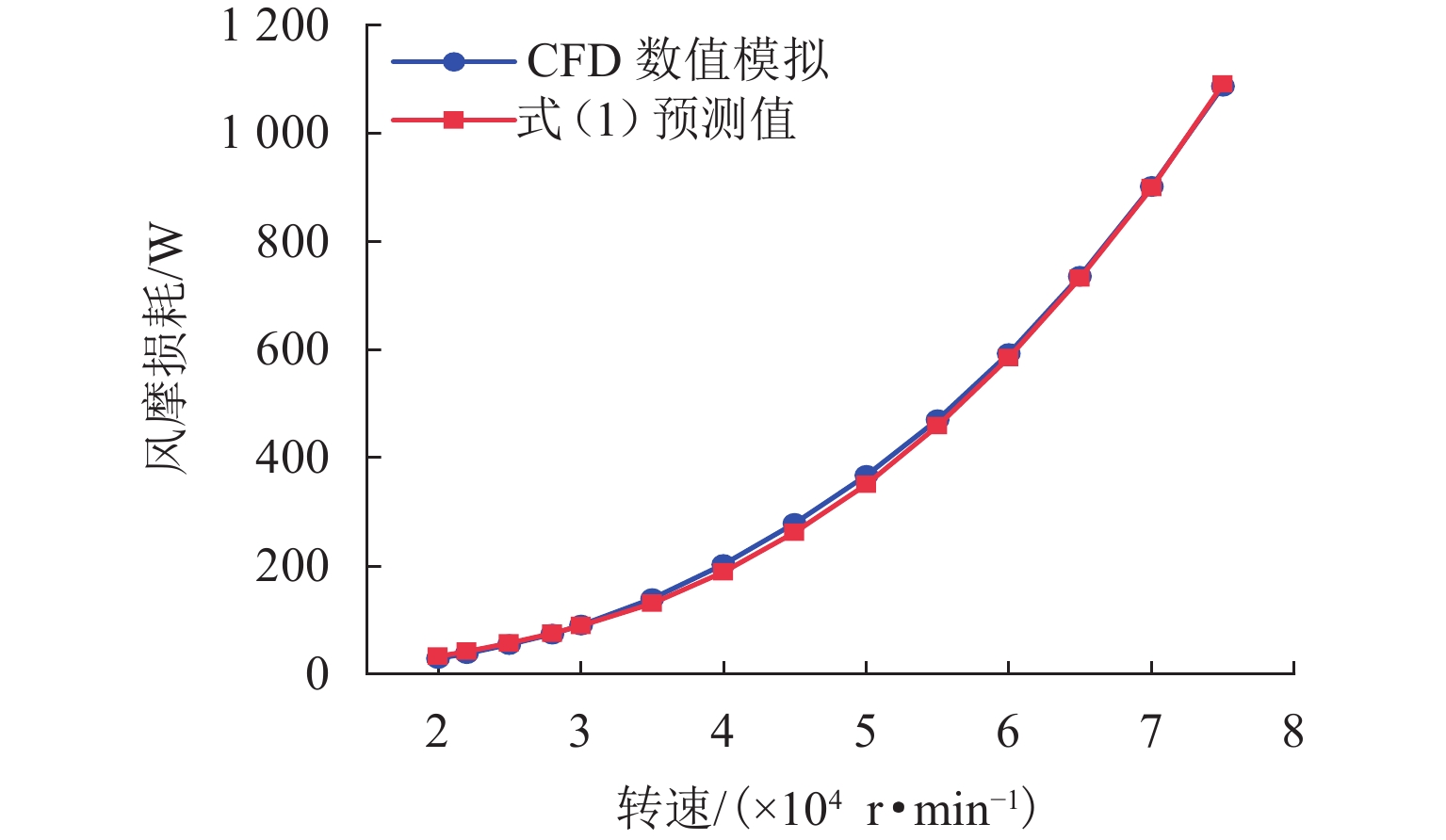
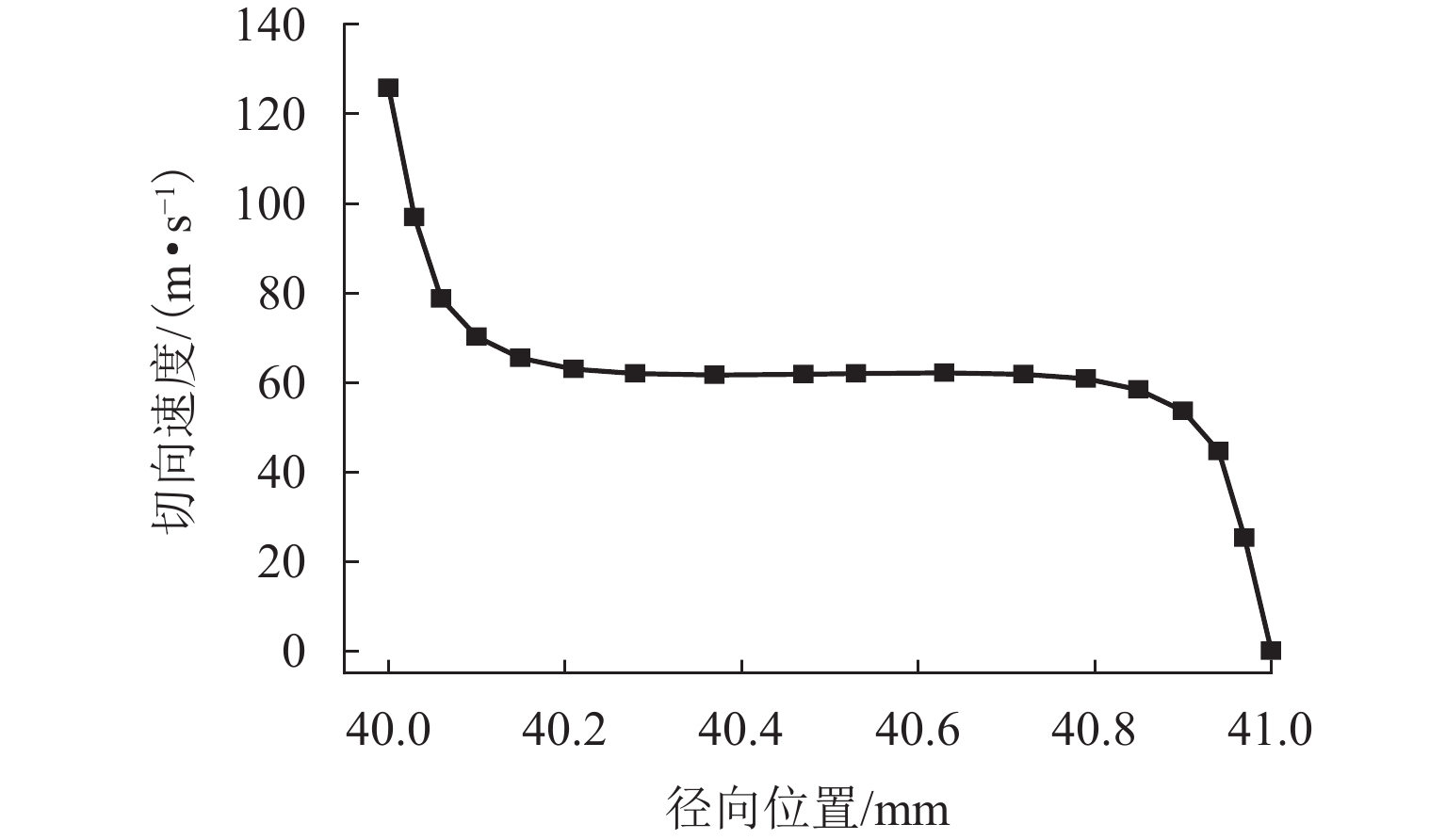
The air friction loss of a motor rotor increases rapidly with the increase in rotational speed. Especially for a high-speed motor supported by magnetic bearings, since the air-gap structure is complex, mastering its air friction loss characteristics is particularly important. A 2 MW、15 000 r/min high-speed permanent magnet motor with magnetic bearings was taken as the research object, and the entire air domain inside the motor was modeled. Firstly, based on the fine simulation technology of computational fluid dynamics (CFD), the distribution characteristics of air friction loss on the rotor surface were obtained. Then, the effects of rotational speed, ventilation wind speed, surface roughness height, air gap structure, and rotor eccentricity on the air friction loss characteristics of the rotor were analyzed in detail. Finally, a dual-motor drag test was conducted, and the air friction loss of the rotor was obtained by the loss separation method. The research results indicate that the air friction loss of the rotor is mainly concentrated in the air gap of the motor. At a rotational speed of 15 000 r/min and a ventilation wind speed of 2.5 m/s, it accounts for approximately 70.1% of the total air friction loss. Meanwhile, the air friction loss at the thrust collar cannot be ignored, accounting for about 23.9% of the total air friction loss under the non-ventilation condition. The synergistic thermal effect of cooling enhancement and loss increase caused by ventilation needs to be comprehensively considered. When the ventilation wind speed increases from 2.5 m/s to 5.0 m/s, the cooling heat transfer coefficient on the rotor surface increases from 315.7 W/(m2•℃) to 469.1 W/(m2•℃), and the air friction loss also increases by 3.13 kW. The maximum error between the experimentally measured values and the simulation calculation results is 8.60%.
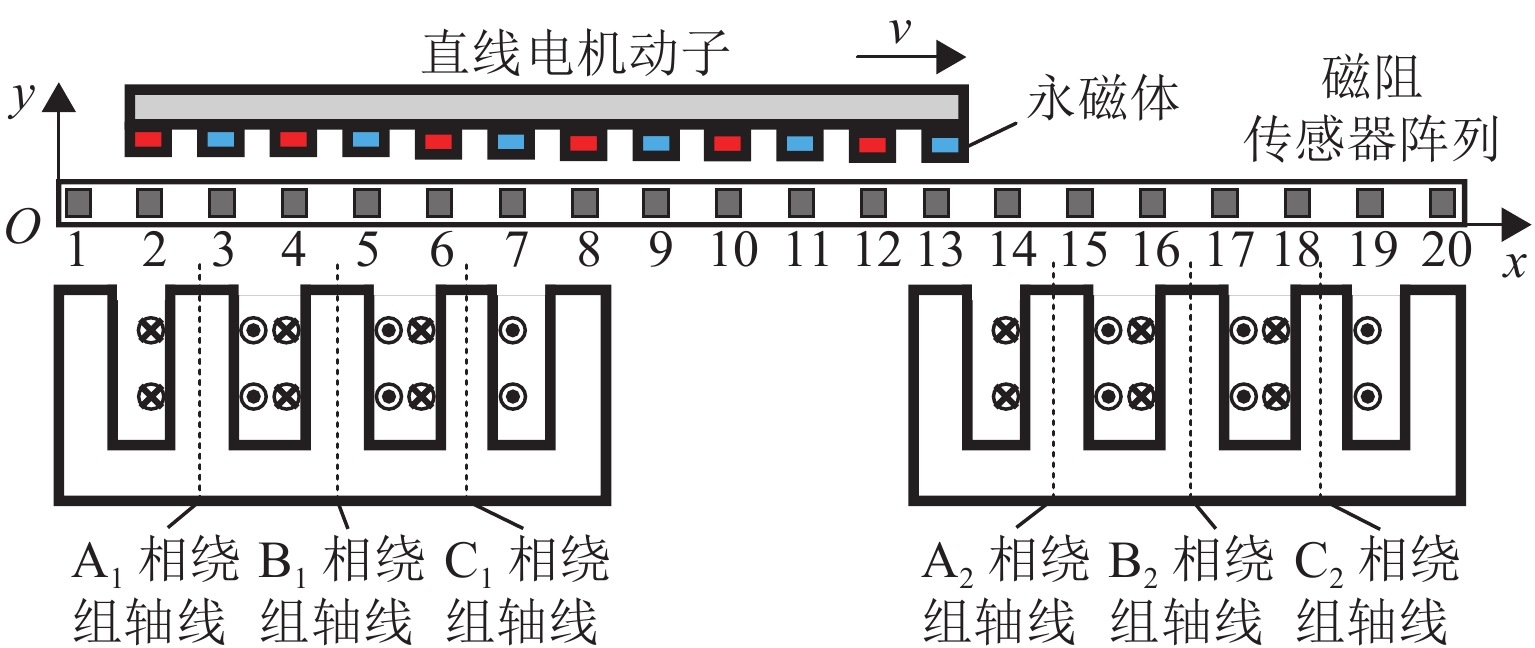
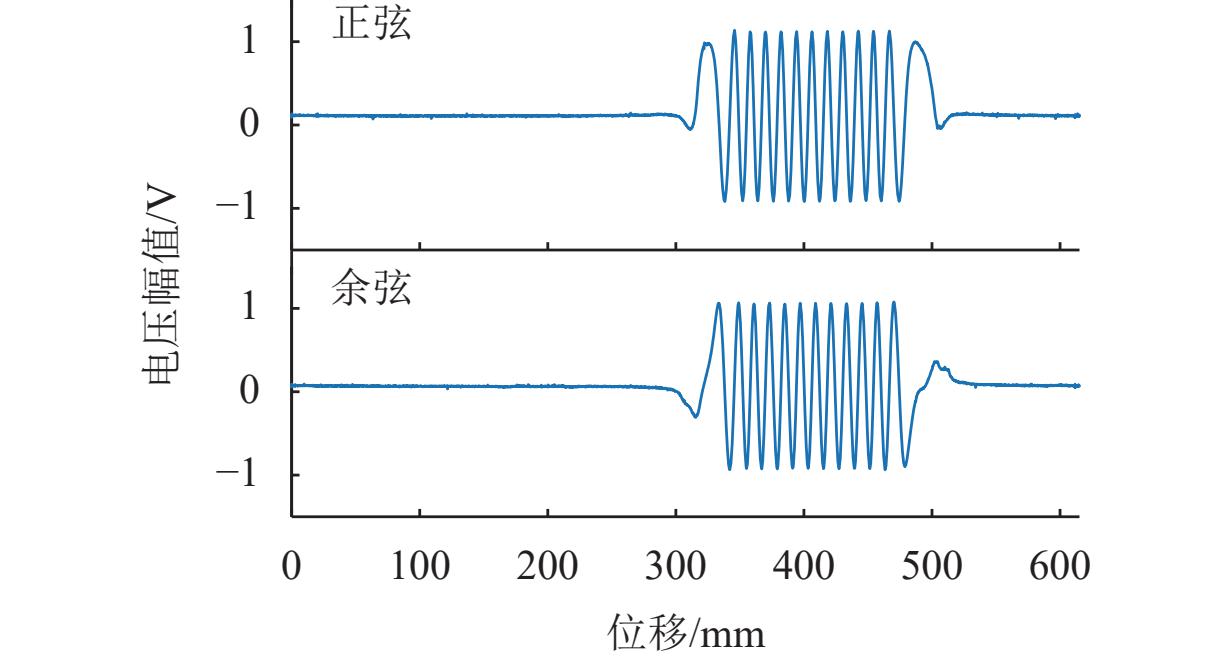
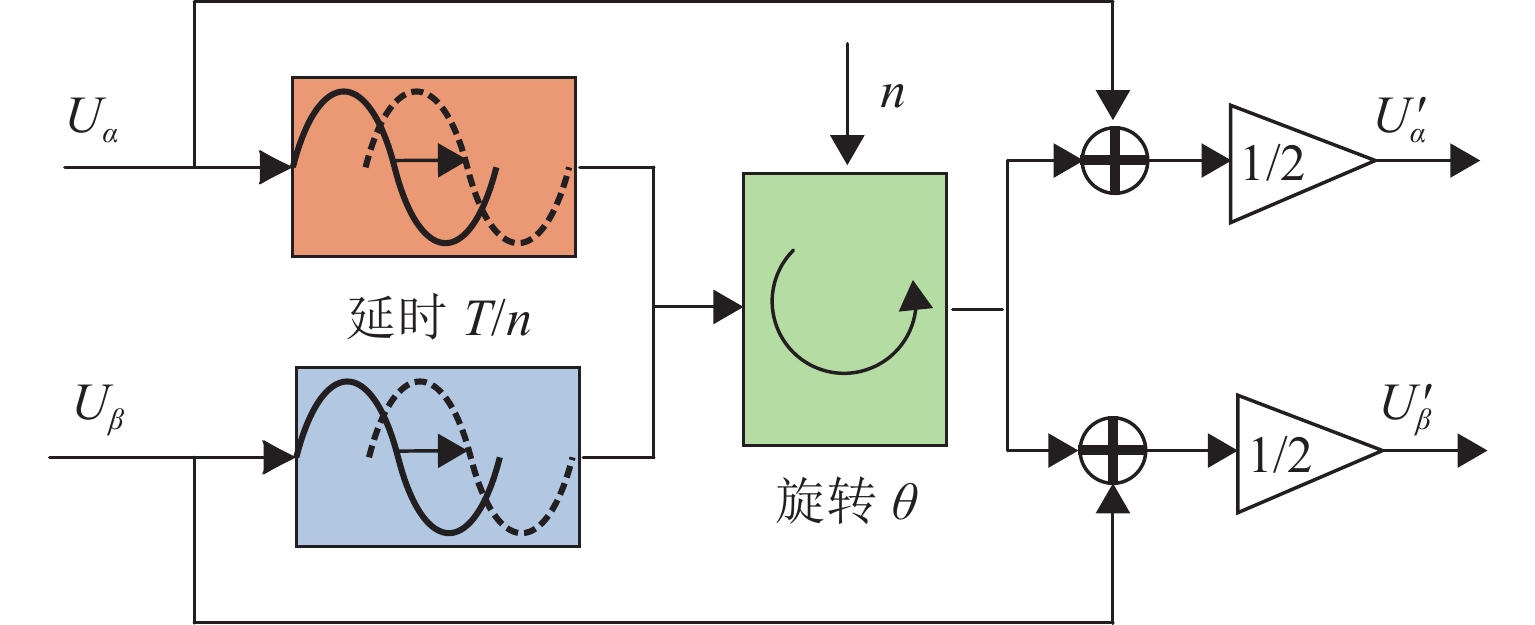
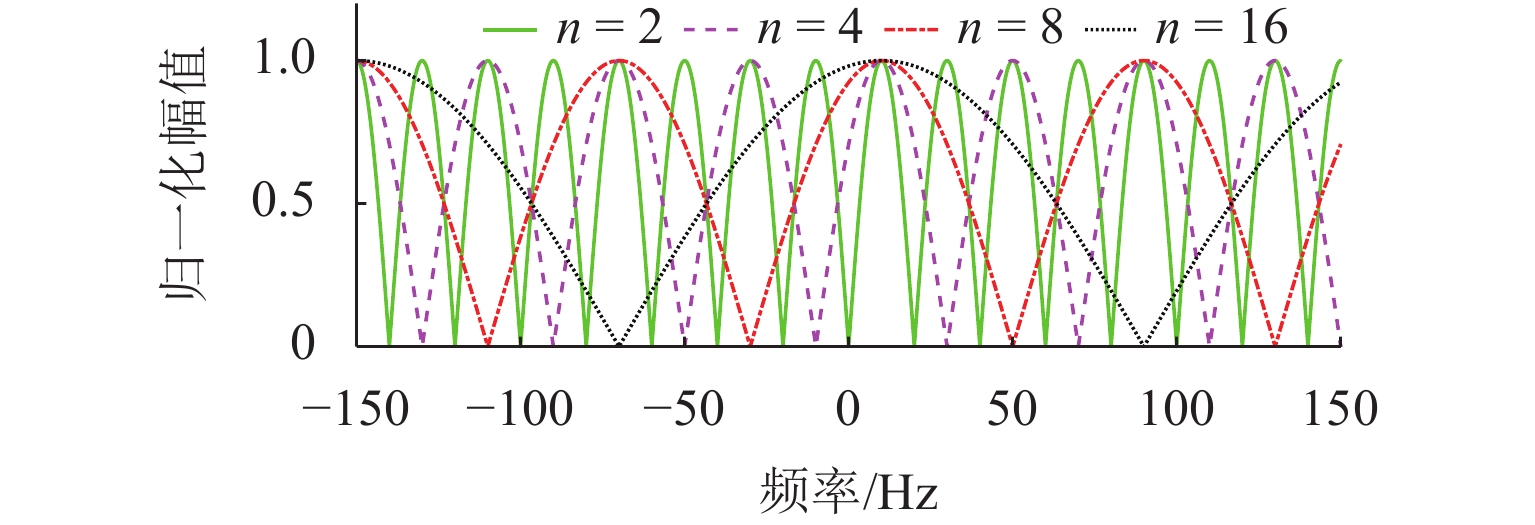
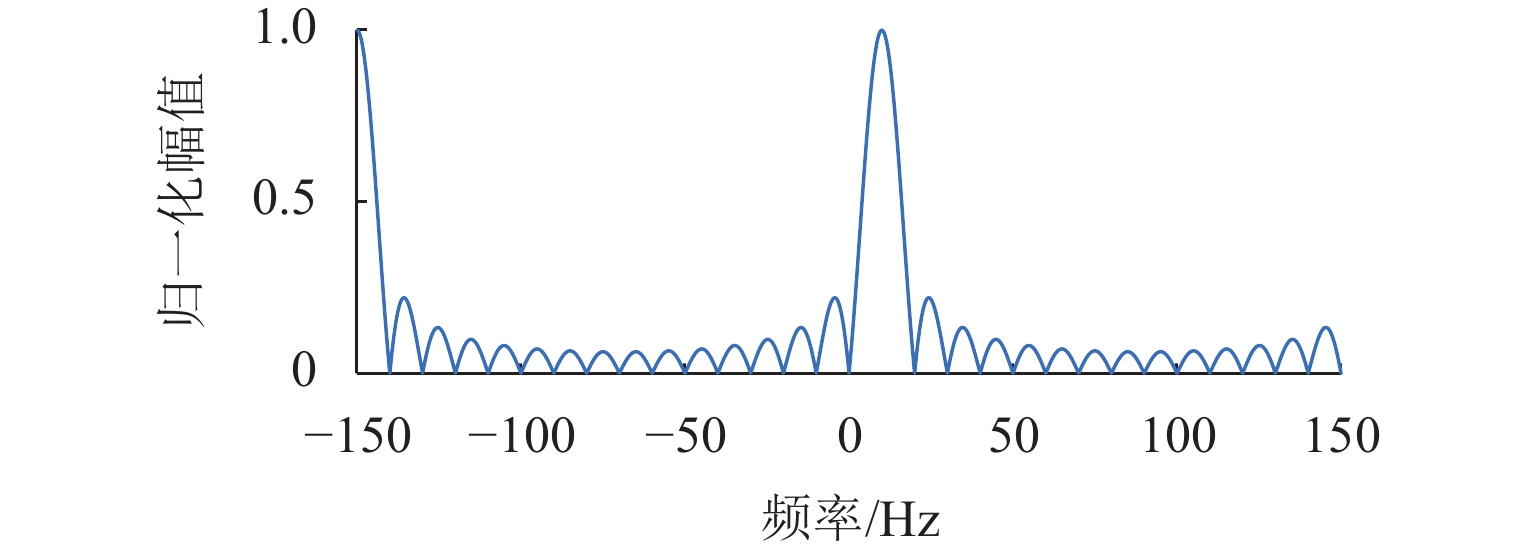
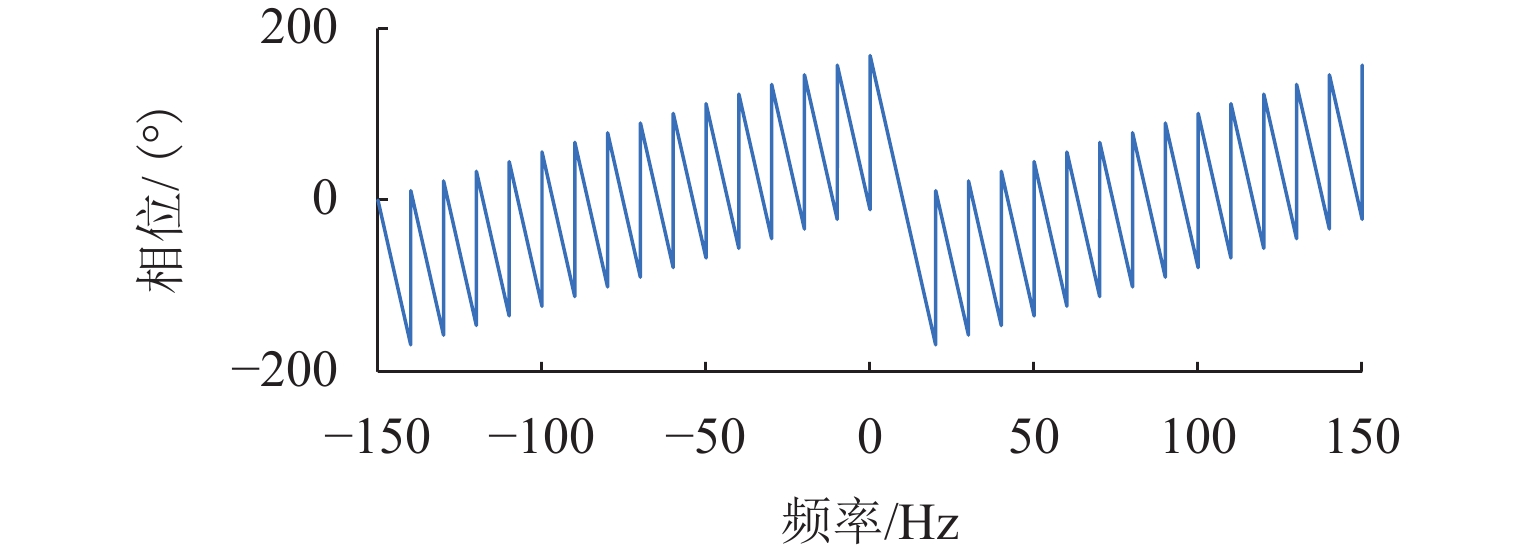
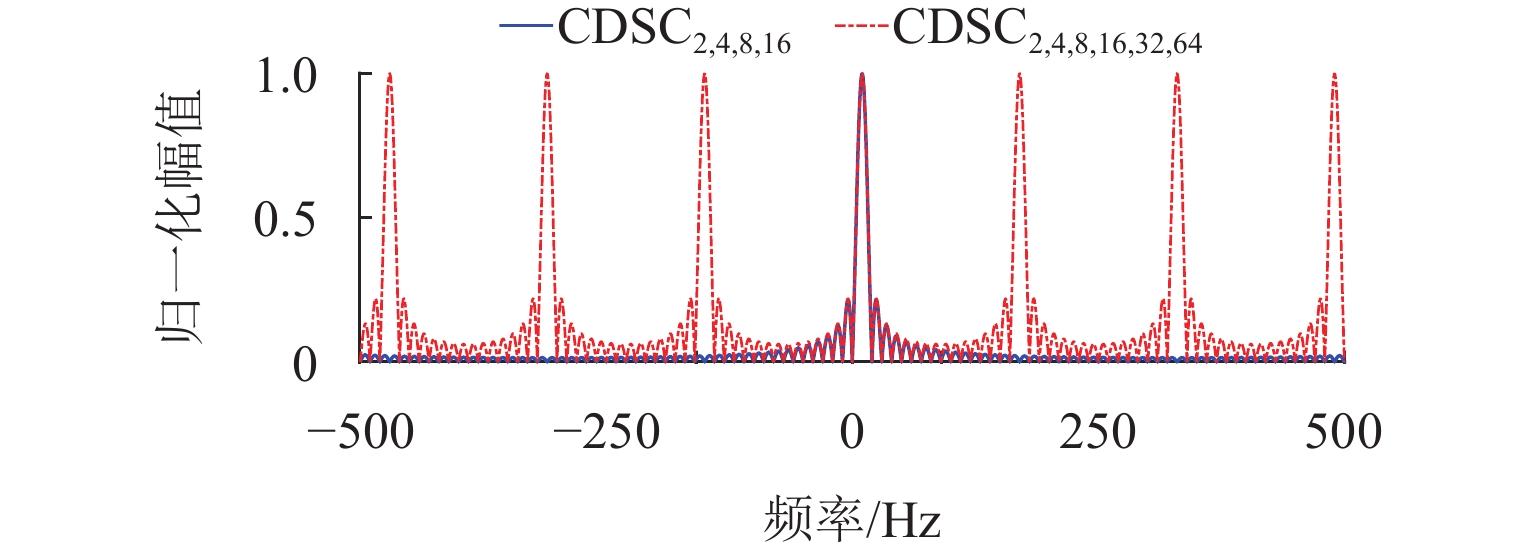
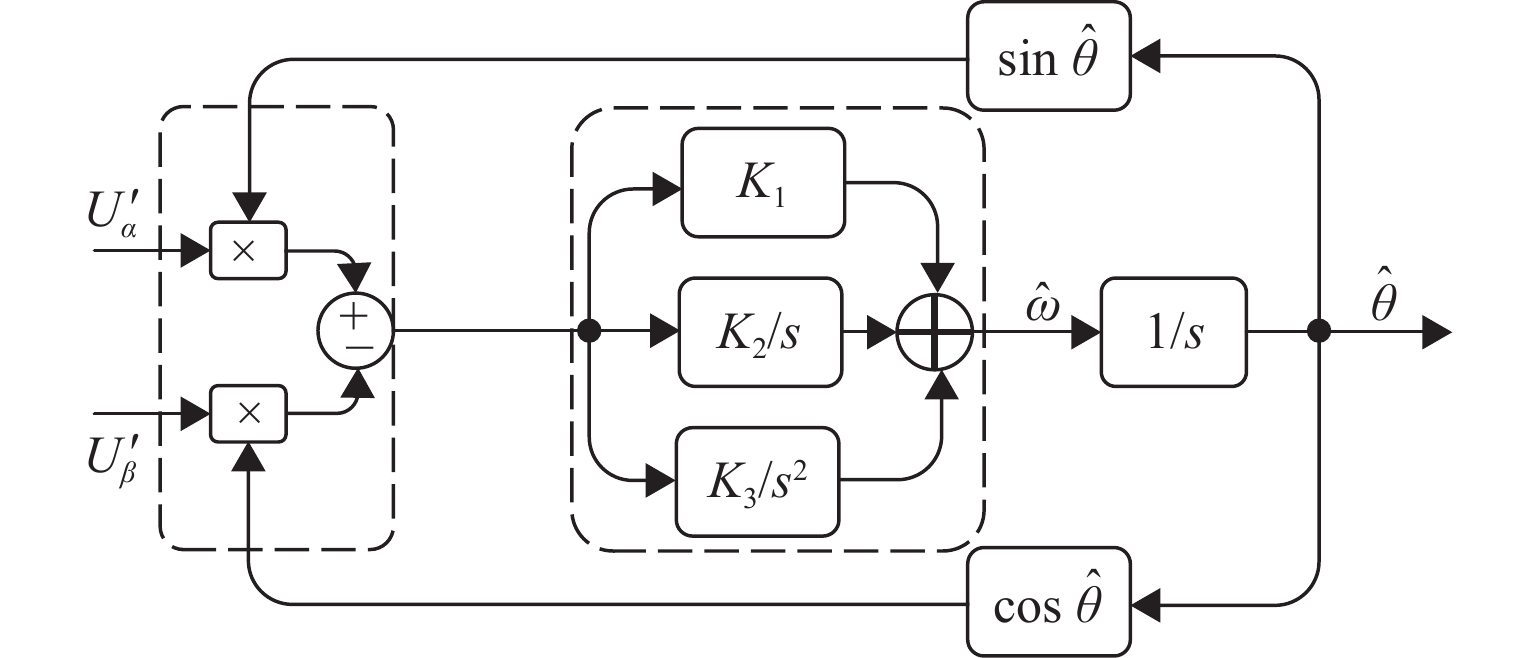
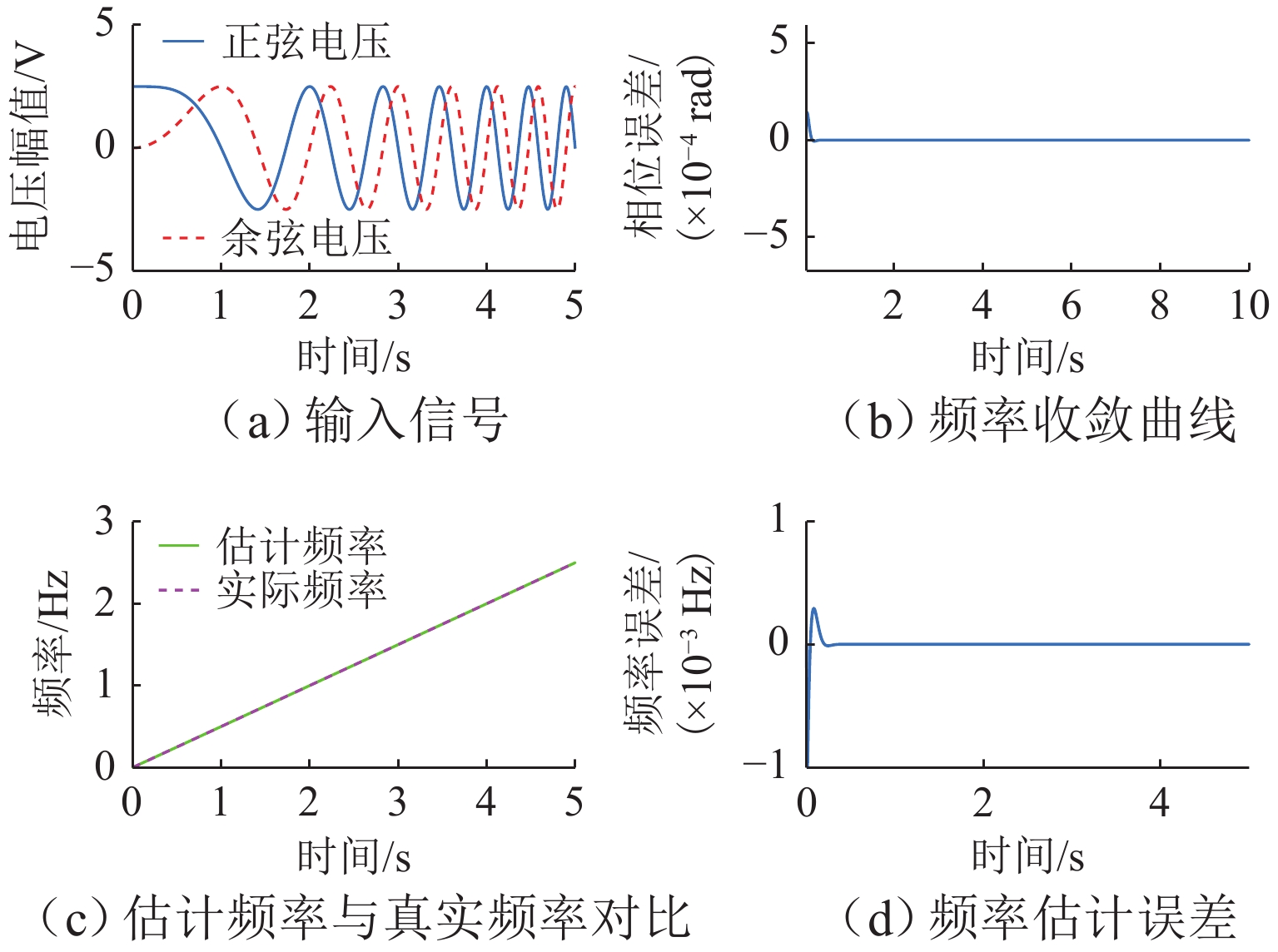
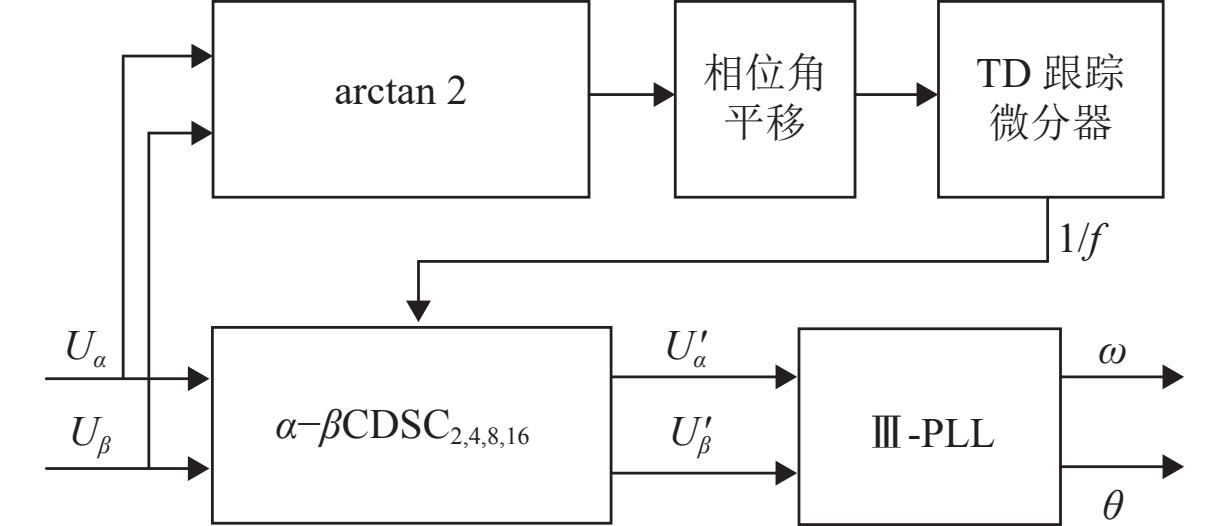
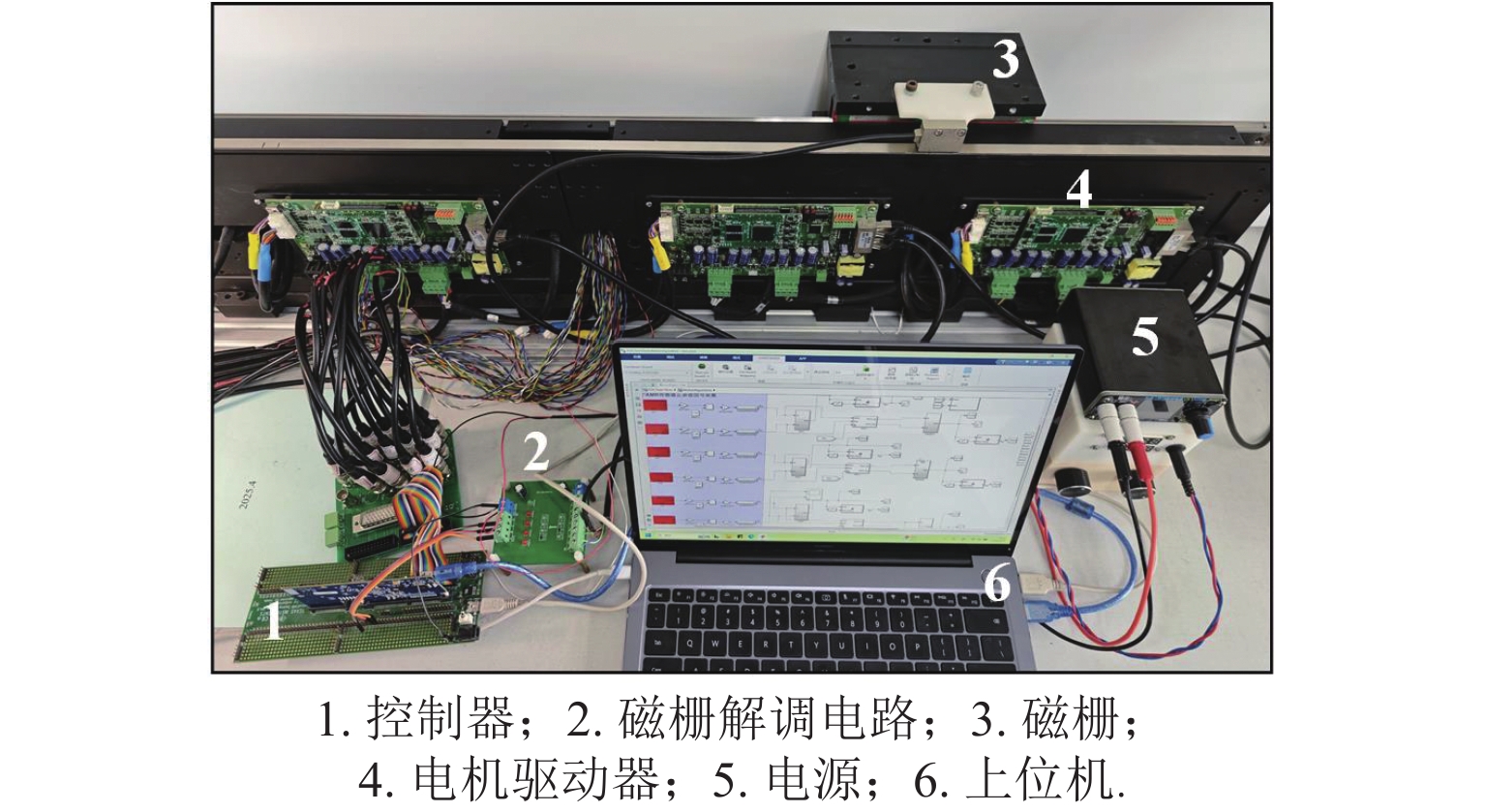
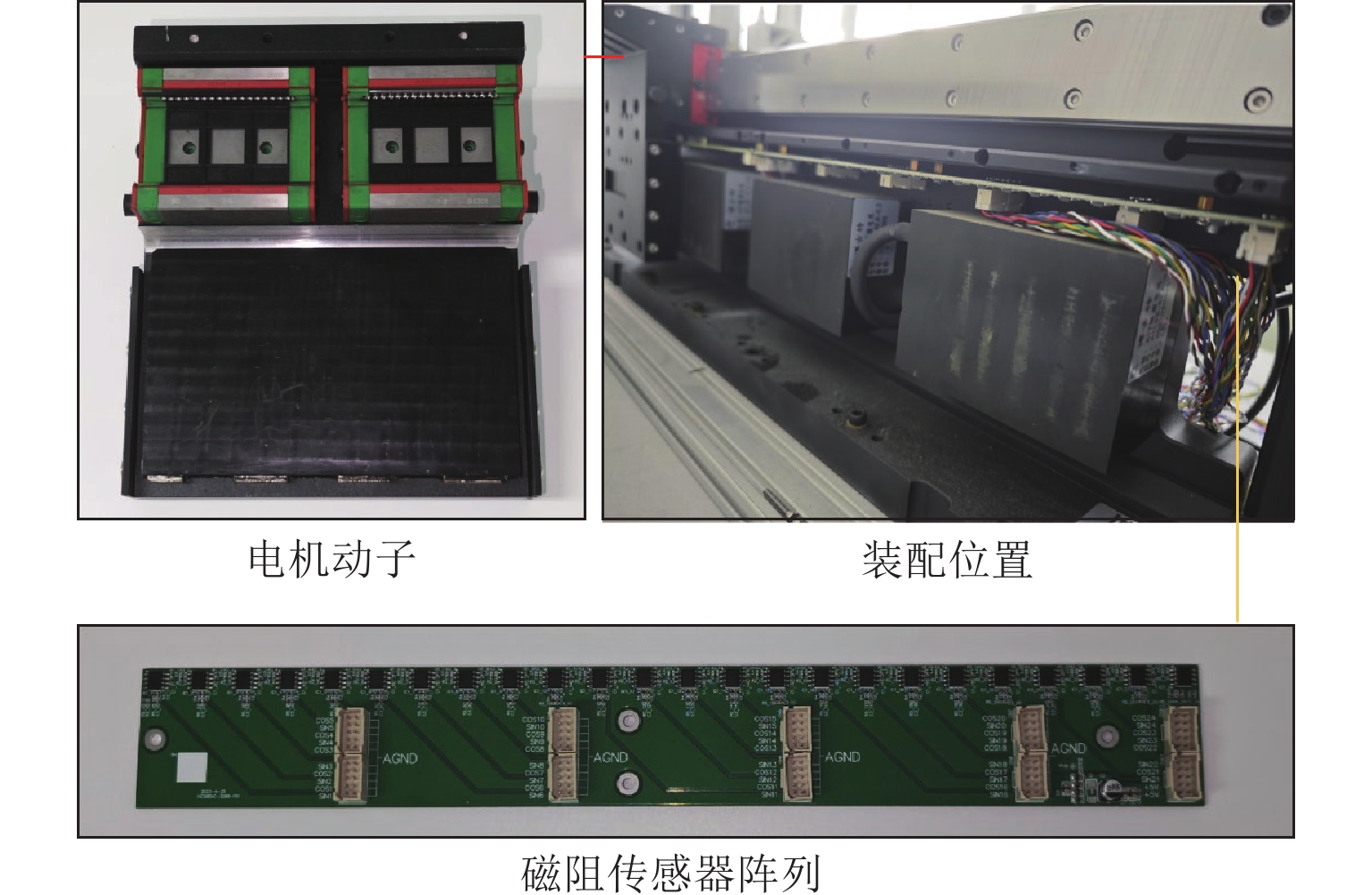
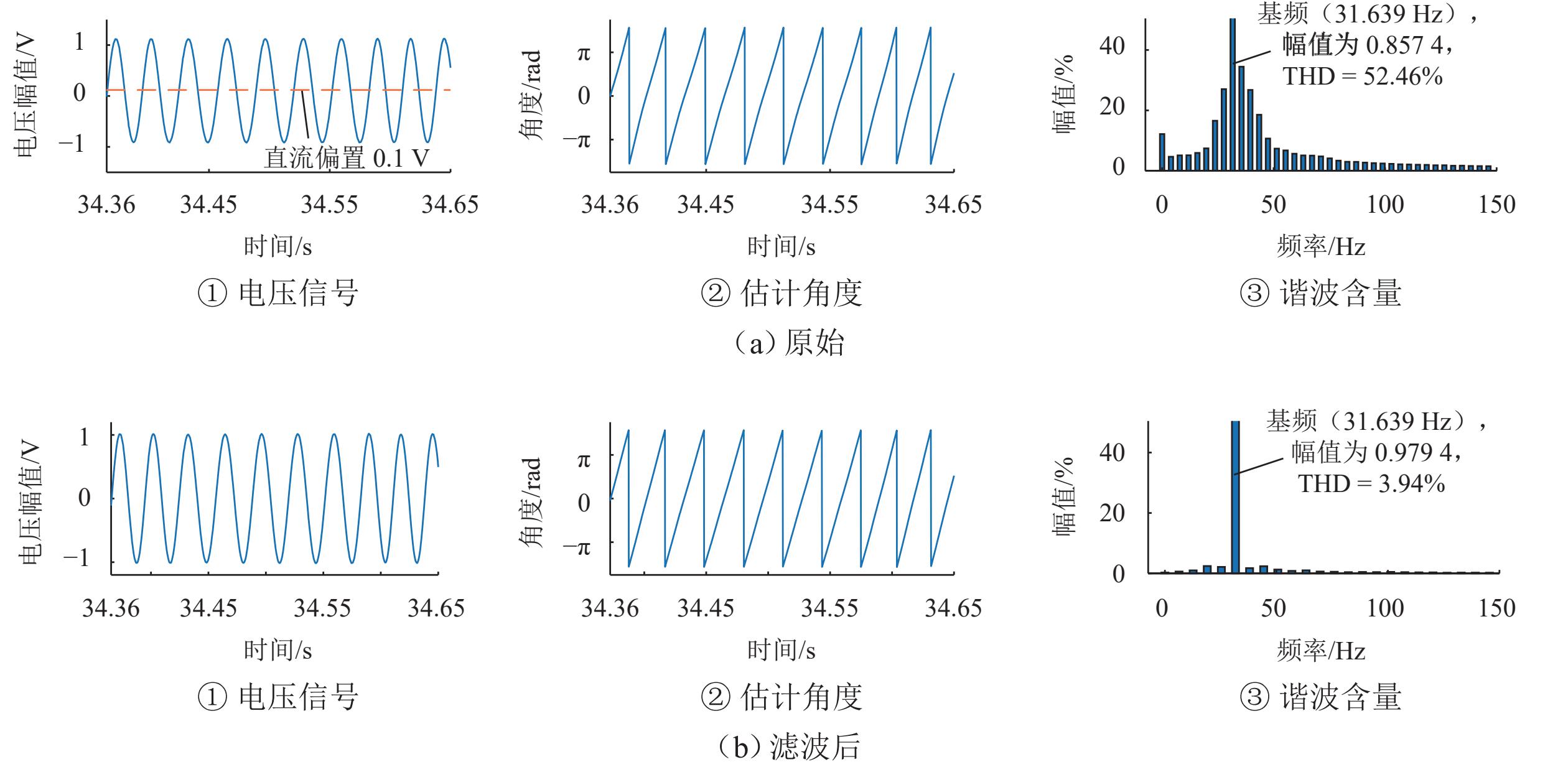
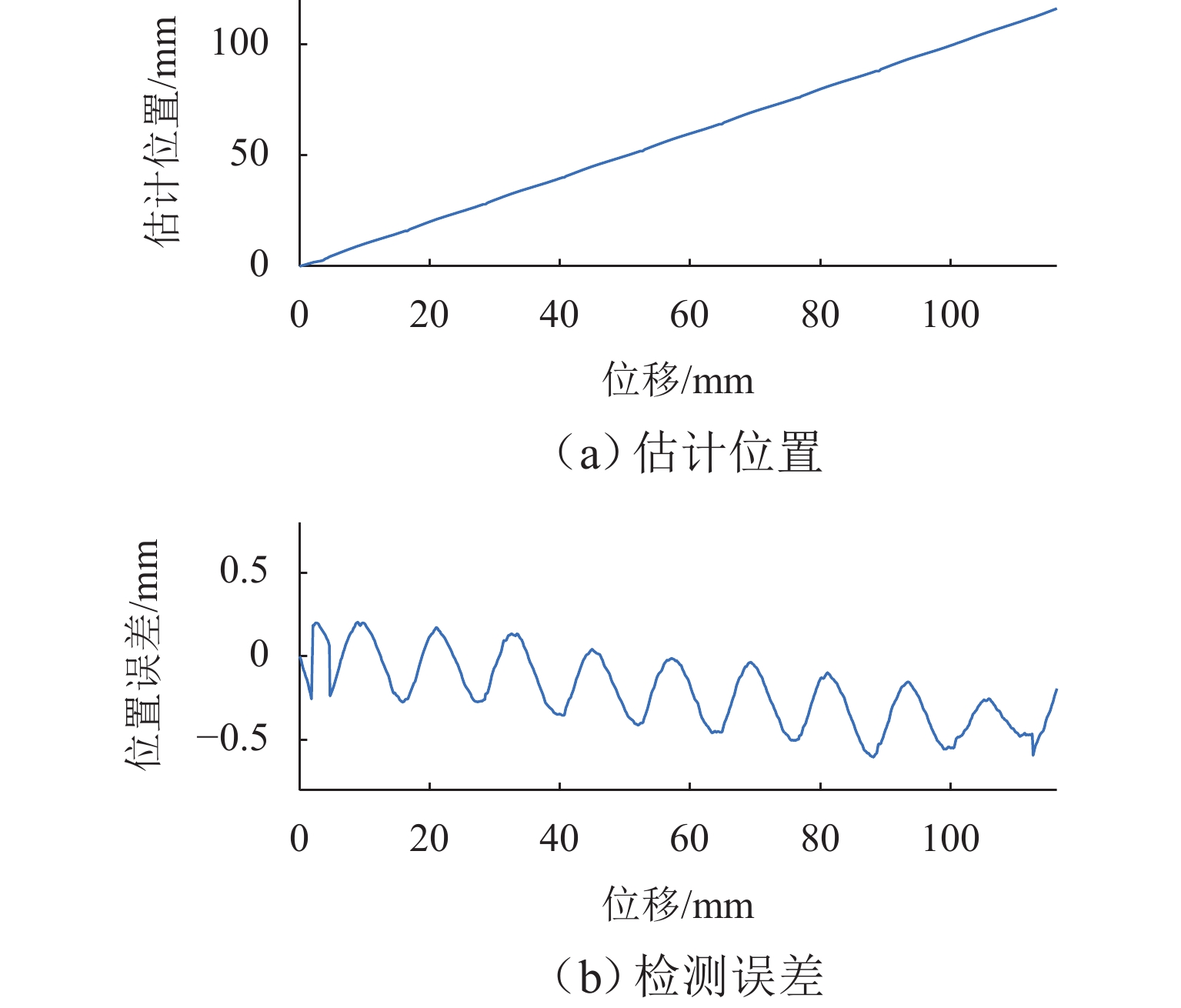
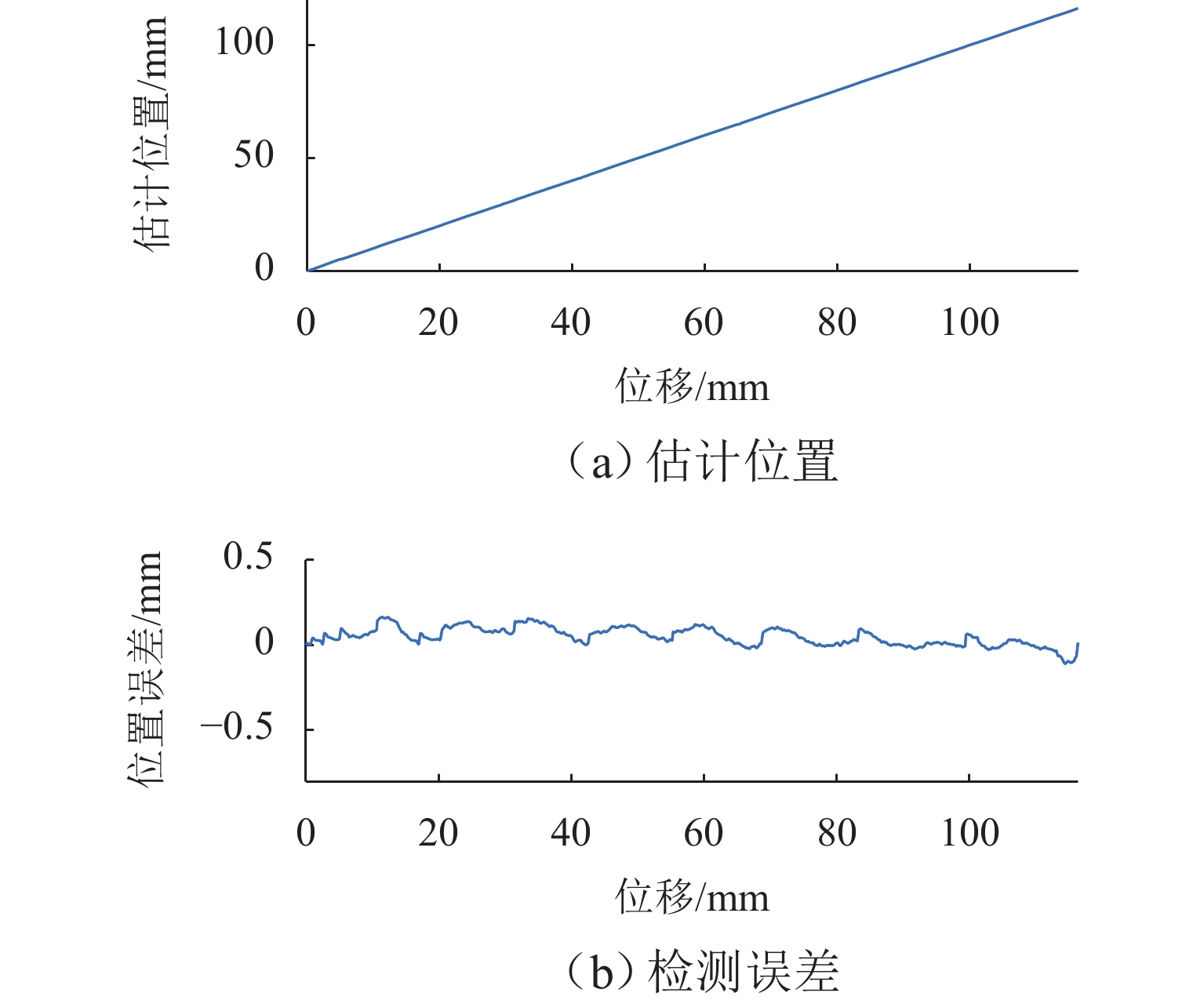
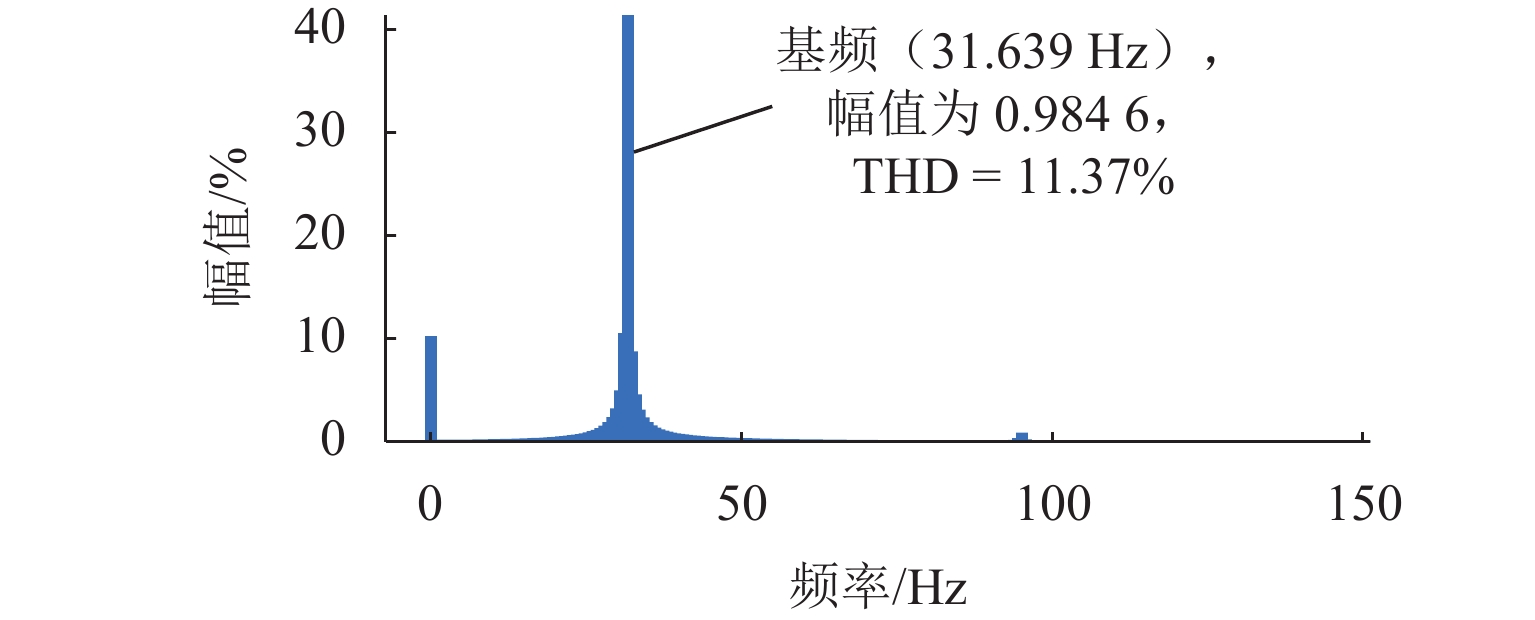
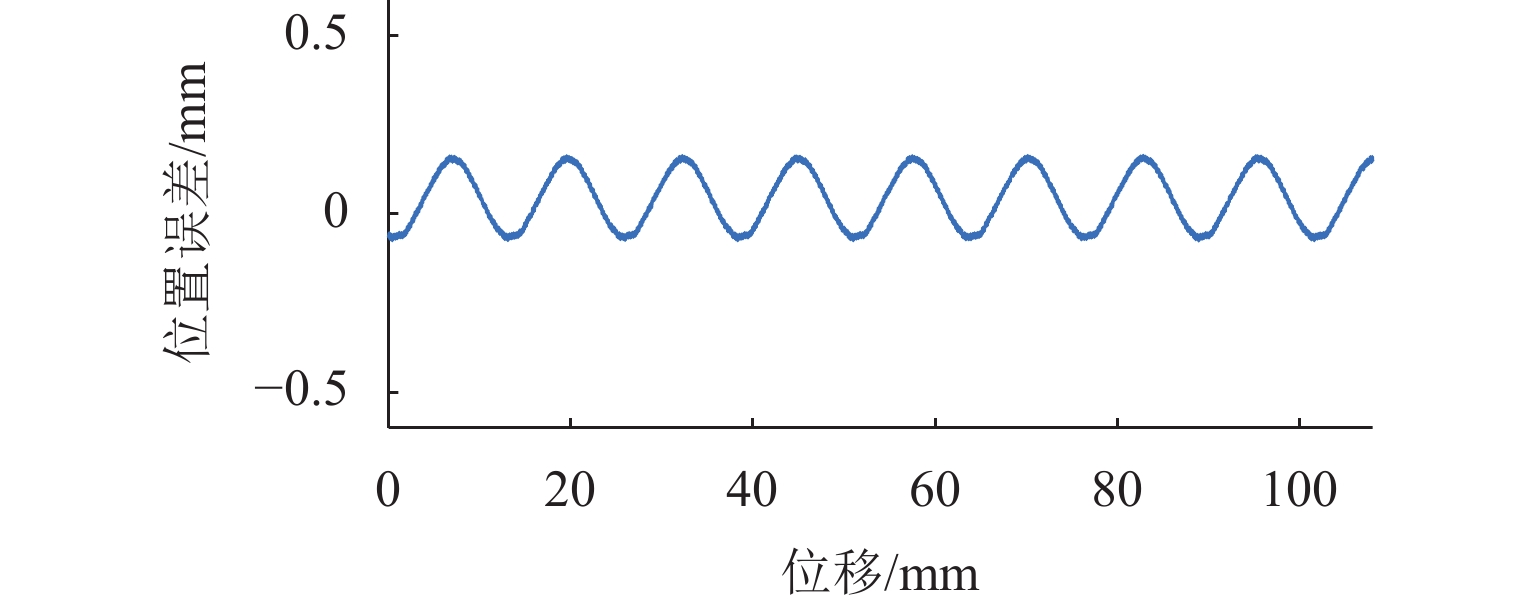
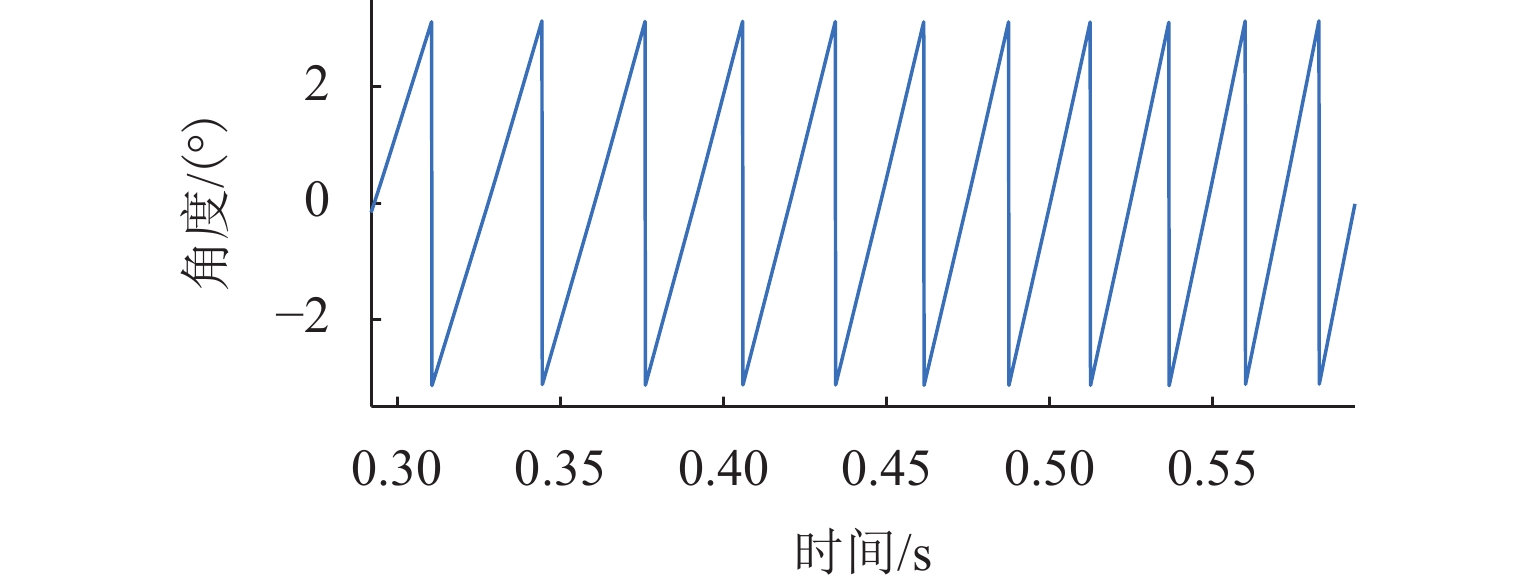
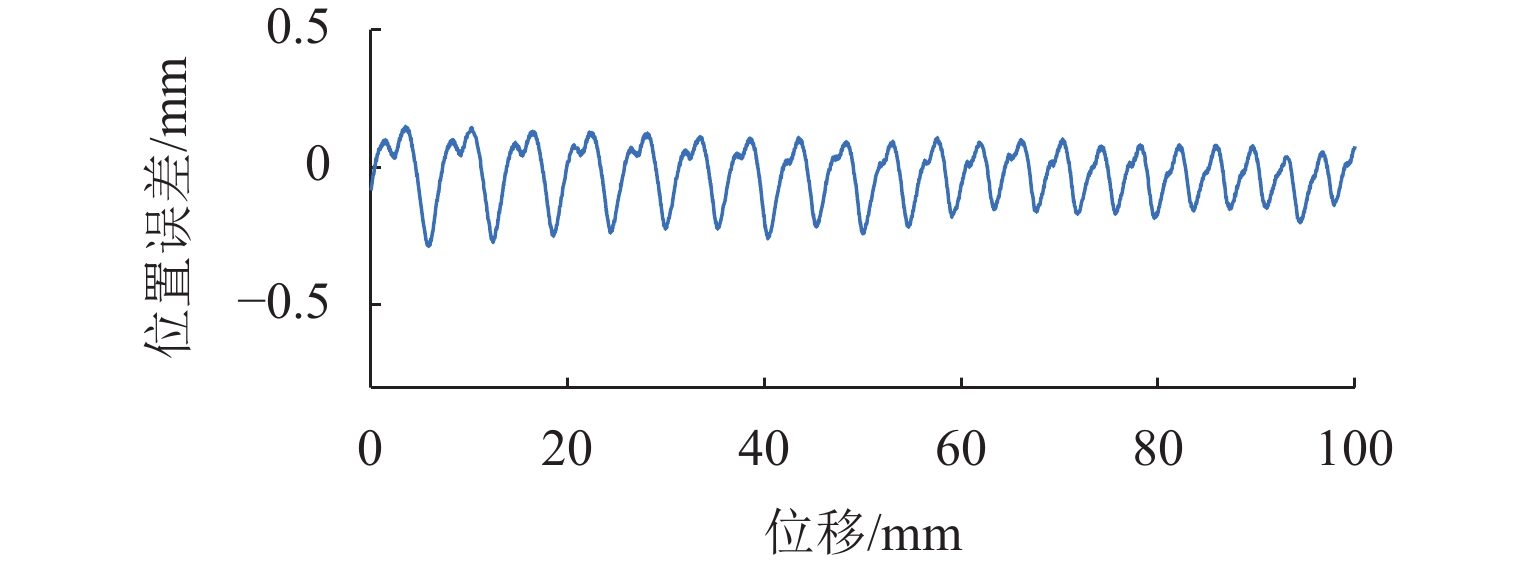
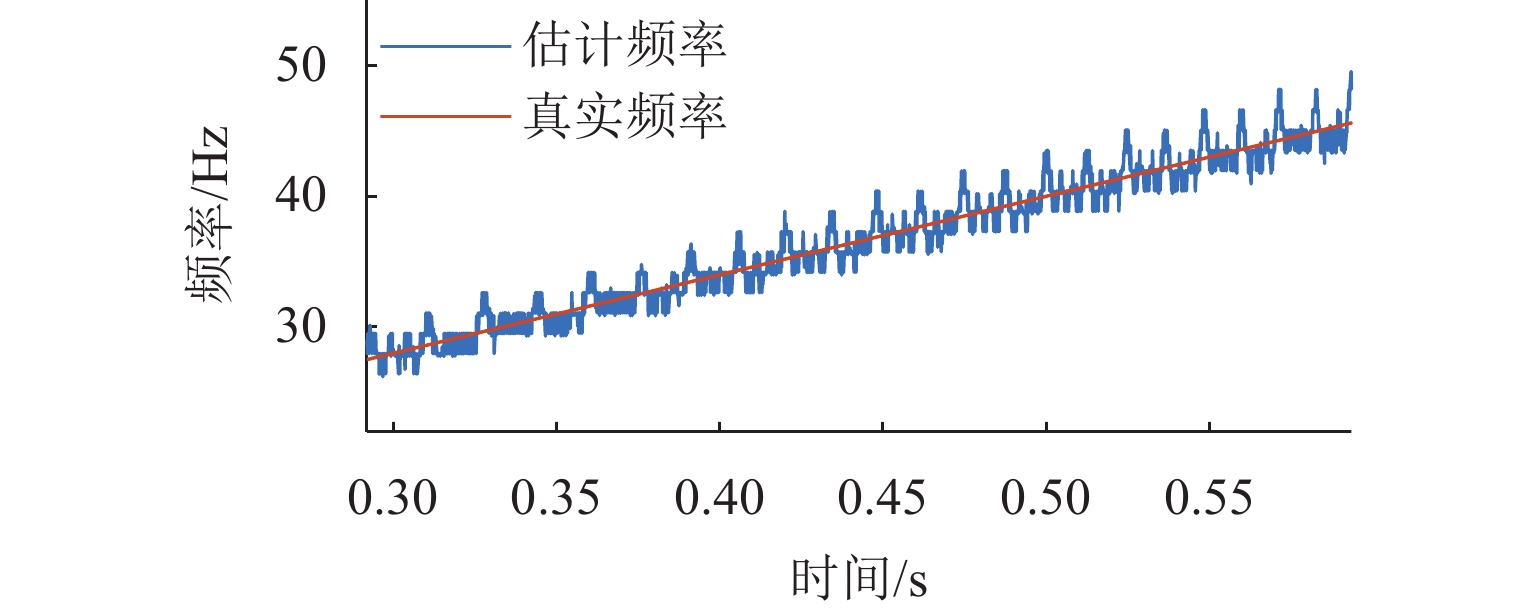
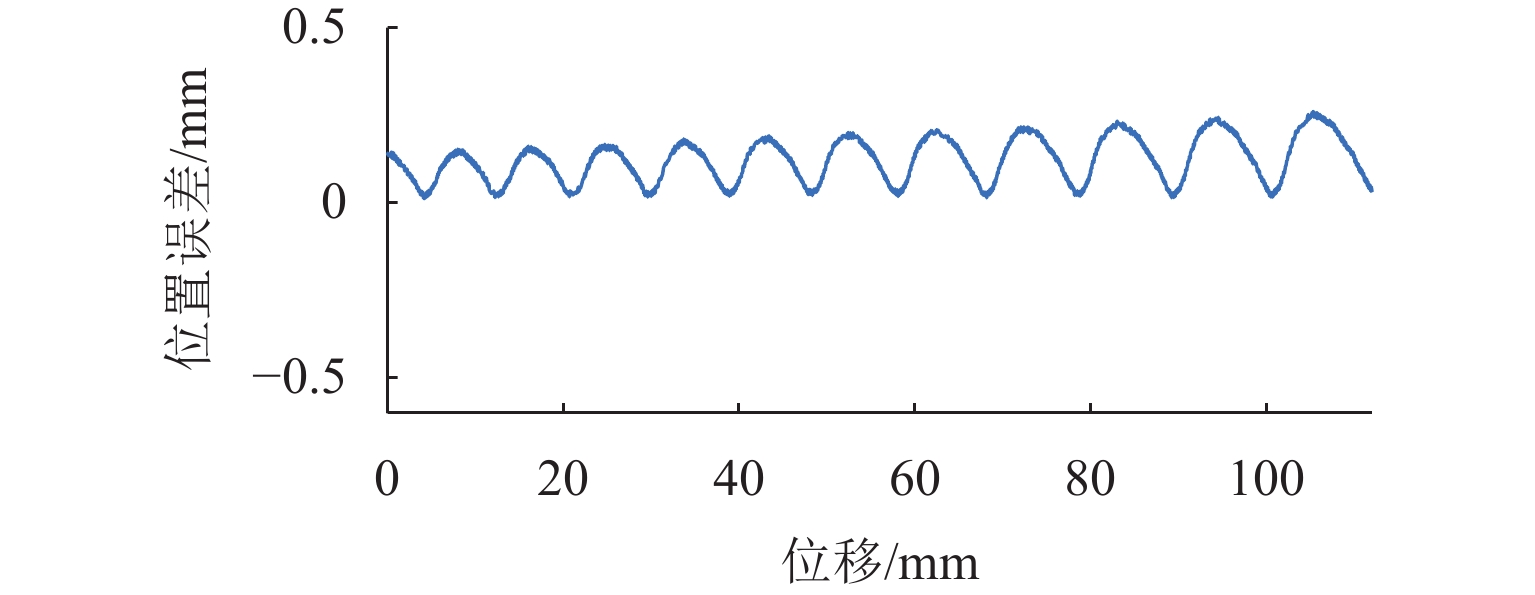
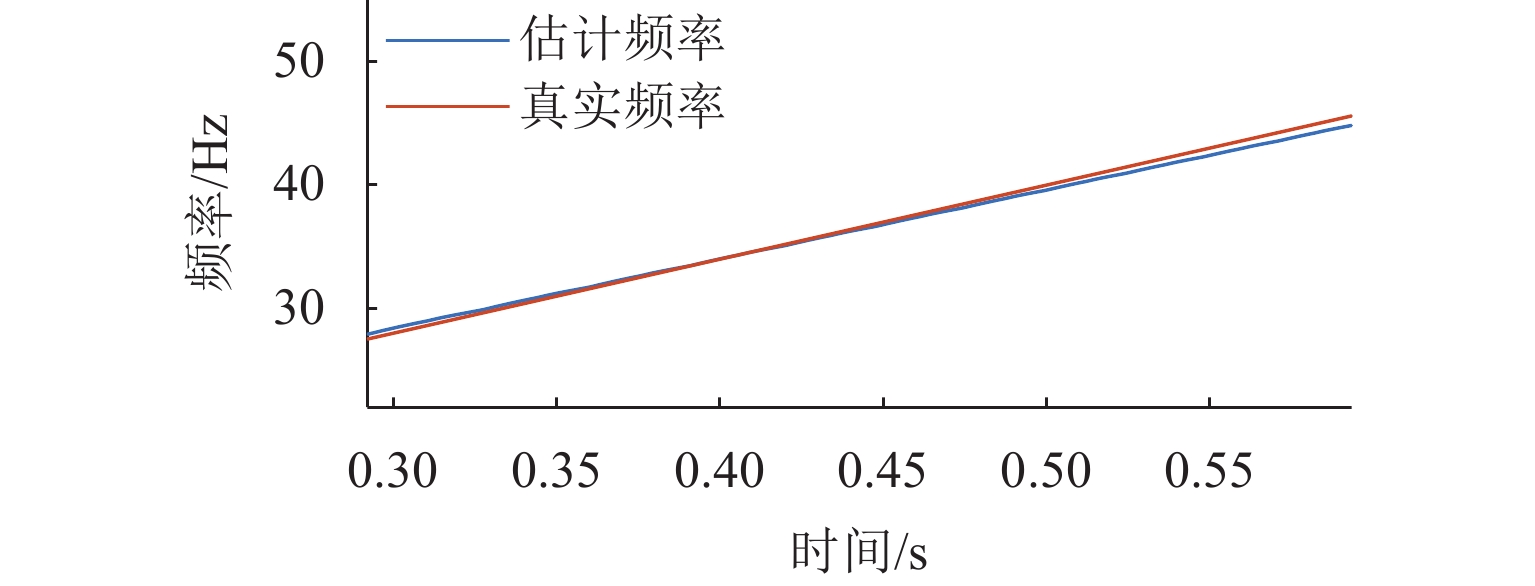
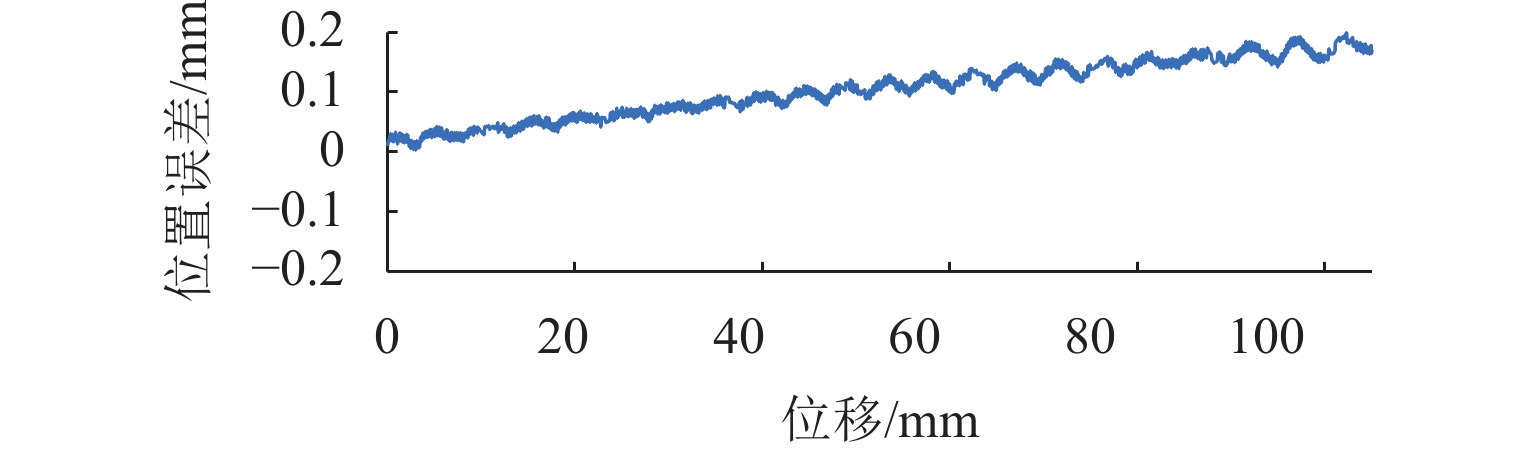
To improve the detection accuracy of the mover position of a primary segmented winding linear motor and reduce the direct current (DC) bias and harmonic interference introduced into the output signals of magnetoresistive sensors by harmonic magnetic fields, temperature variations, and other factors, a position detection method based on a frequency-adaptive cascaded delayed signal filter was investigated. First, a frequency-adaptive cascaded delayed signal filter was designed to suppress DC bias and multi-order harmonic disturbances by introducing signal delay and cascading the filters, thereby addressing the limitations of traditional methods, which required prior knowledge of harmonic orders and showed poor filtering performance for interferences near the fundamental frequency. Second, combined with type-Ⅲ phase-locked loop technology, quadrature phase locking was performed on the filtered signals to achieve synchronous extraction of the motor’s magnetic pole angle and mover position information. Finally, an experimental platform for the primary segmented winding linear motor was established to verify the filtering performance and position detection accuracy of the proposed method. The research results indicate that the proposed filtering method can effectively suppress harmonic voltages near the fundamental frequency and DC bias without relying on a motor model; under complex harmonic interference conditions, compared with the detection scheme combining traditional filters and phase-locked loops, it reduces the estimation error of the mover position of the linear motor by 68.75%.

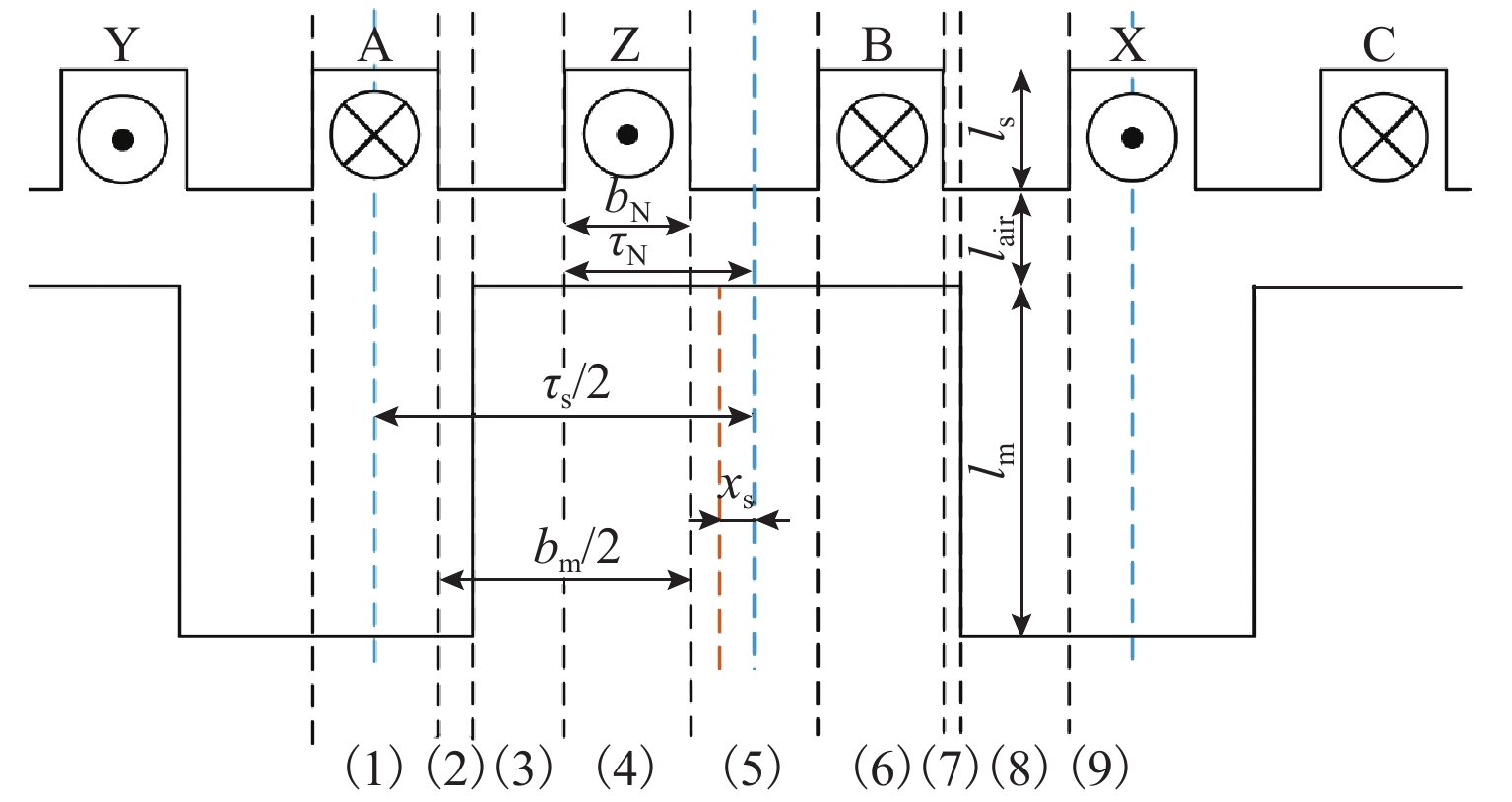
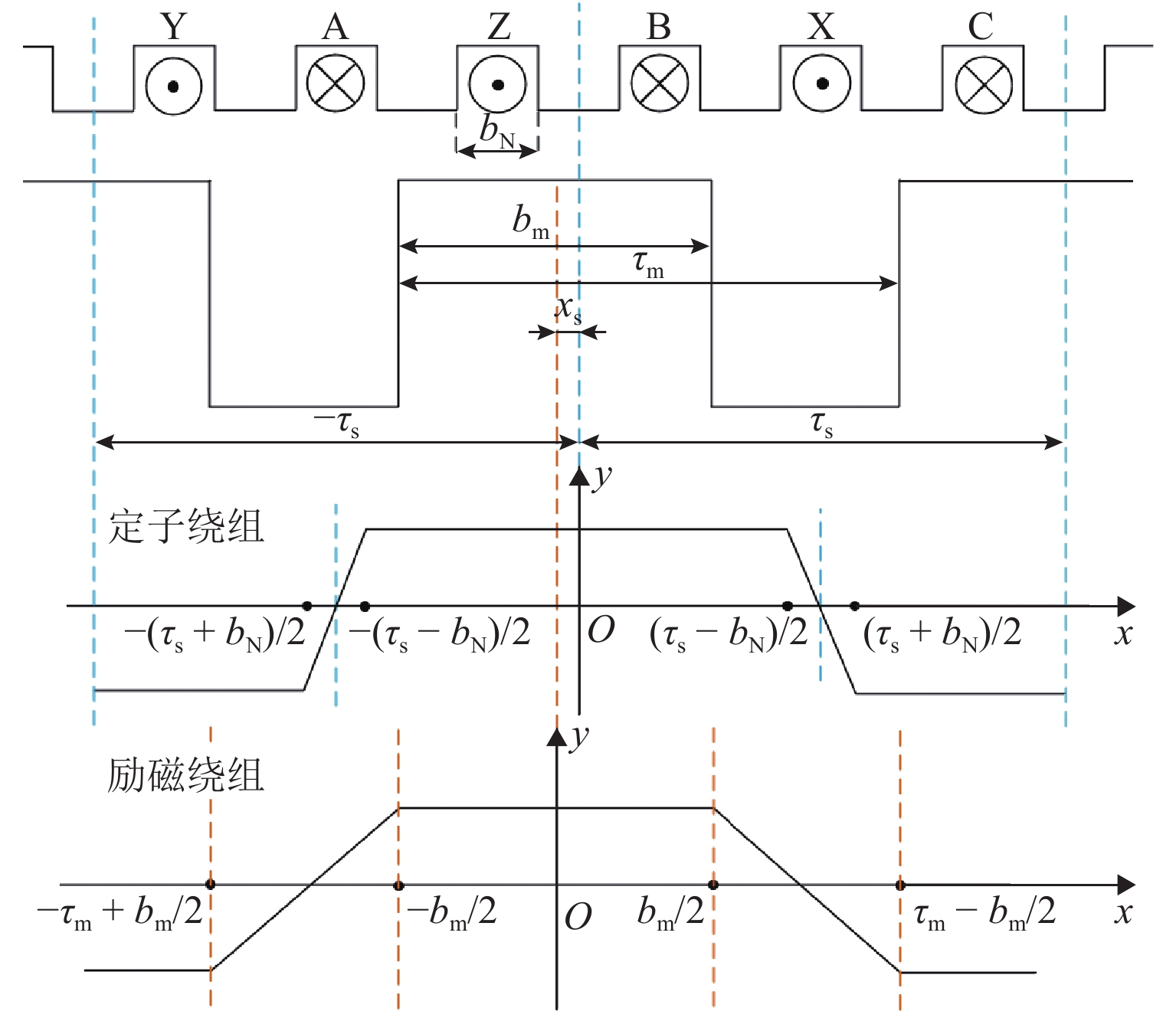
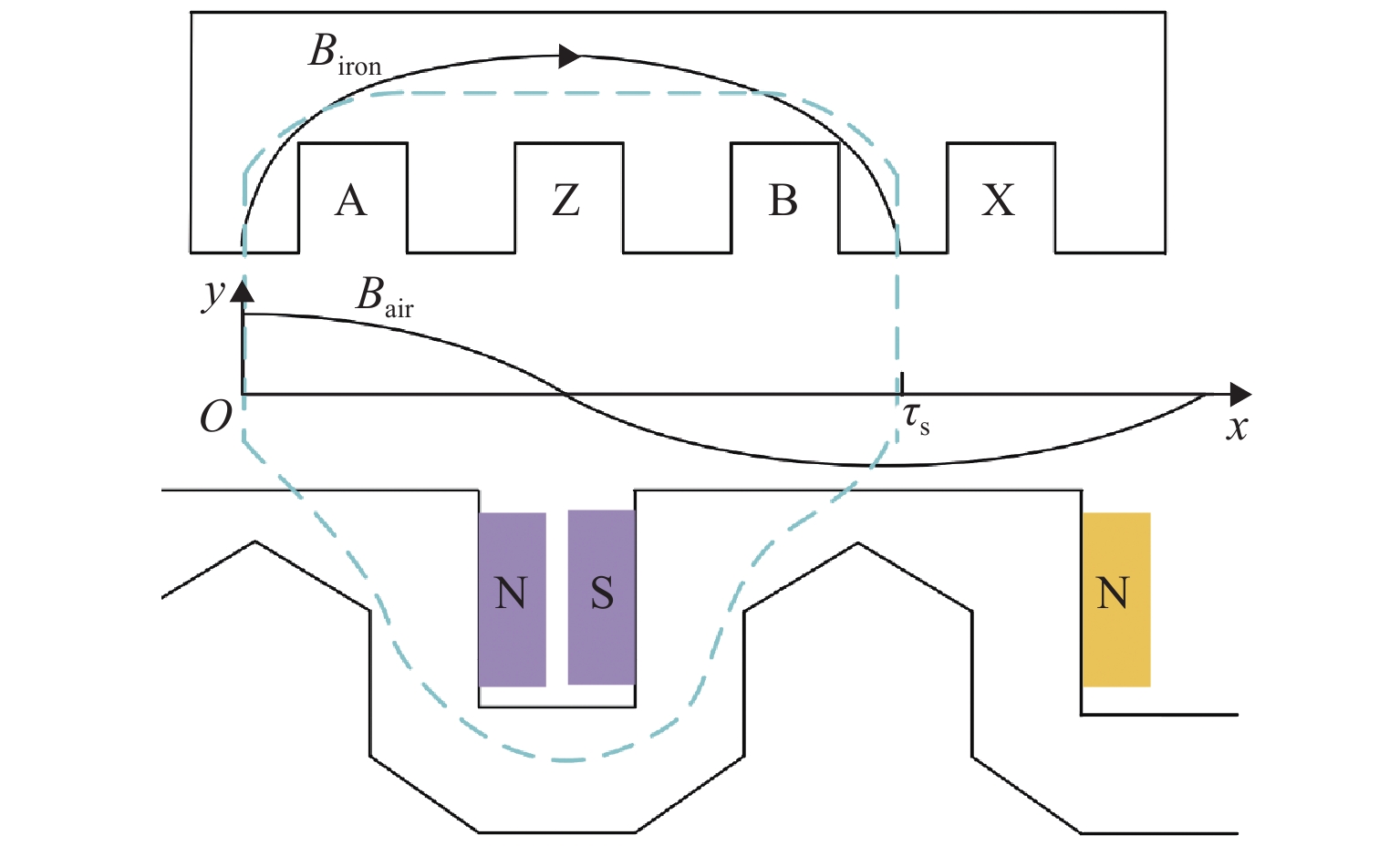
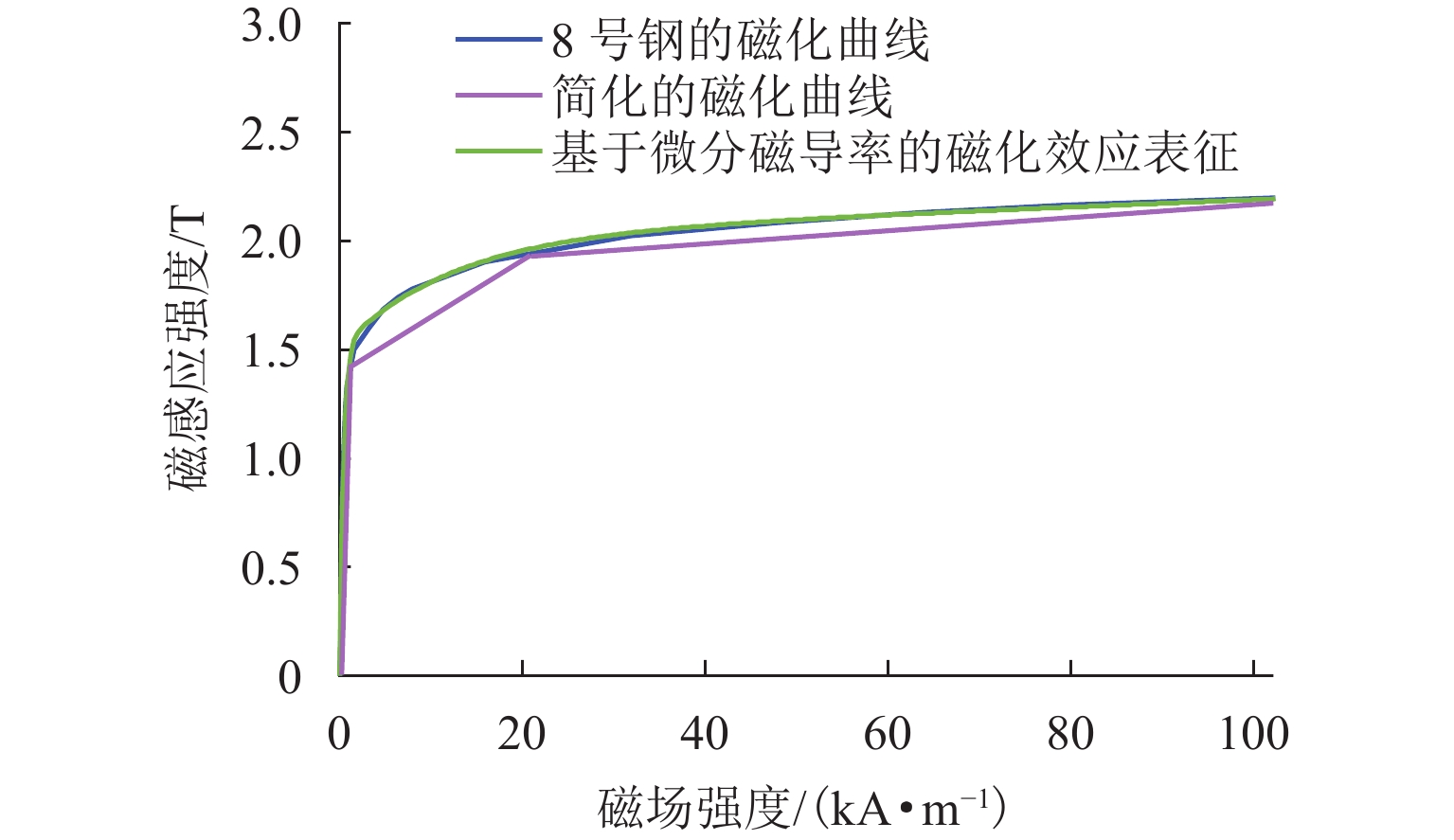
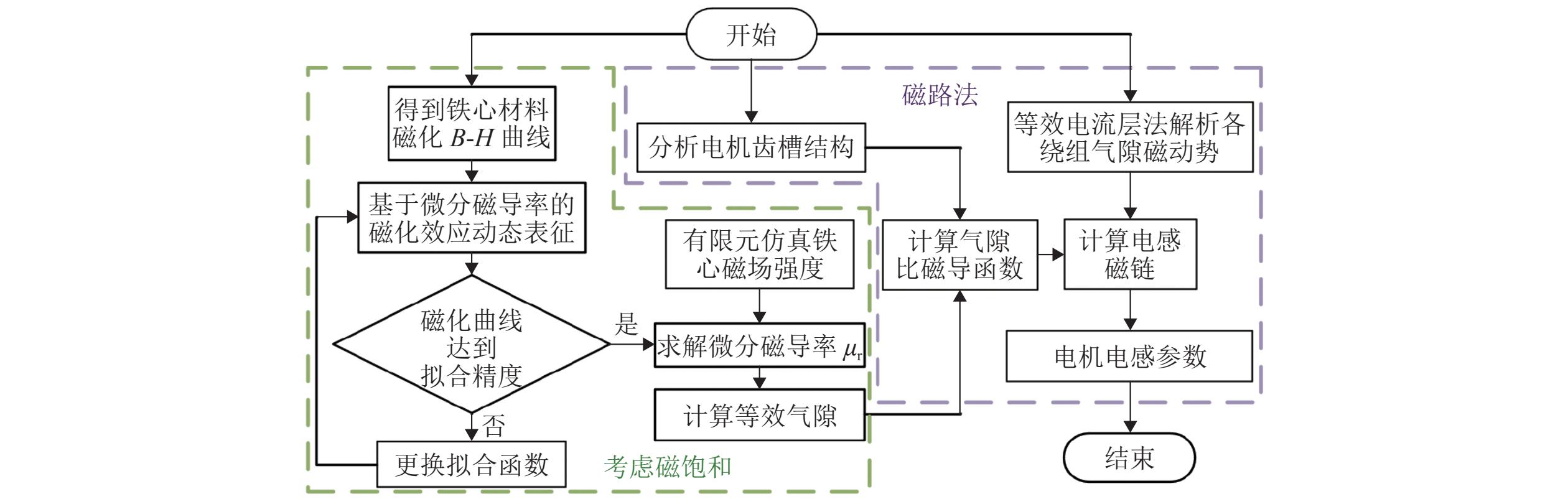
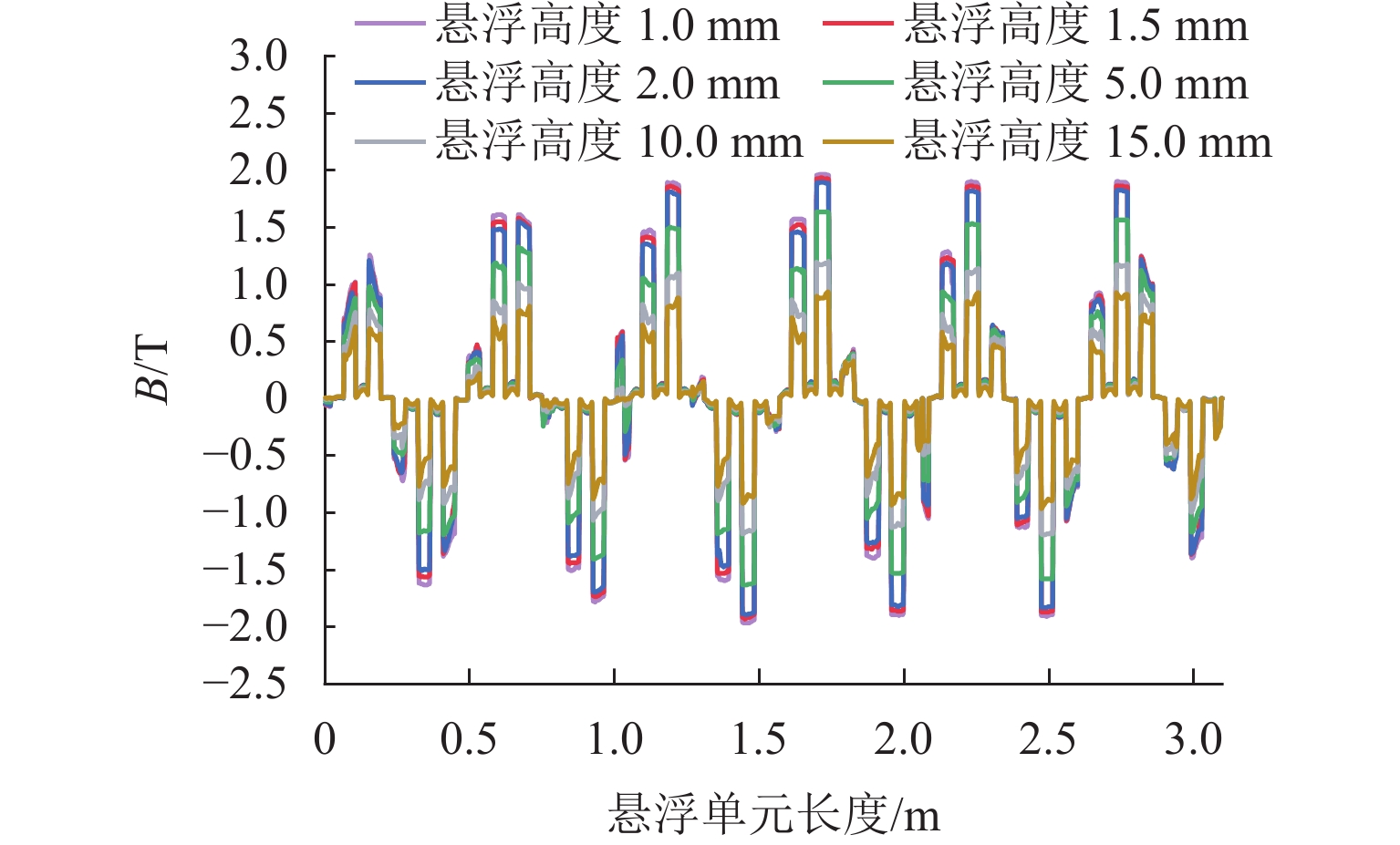
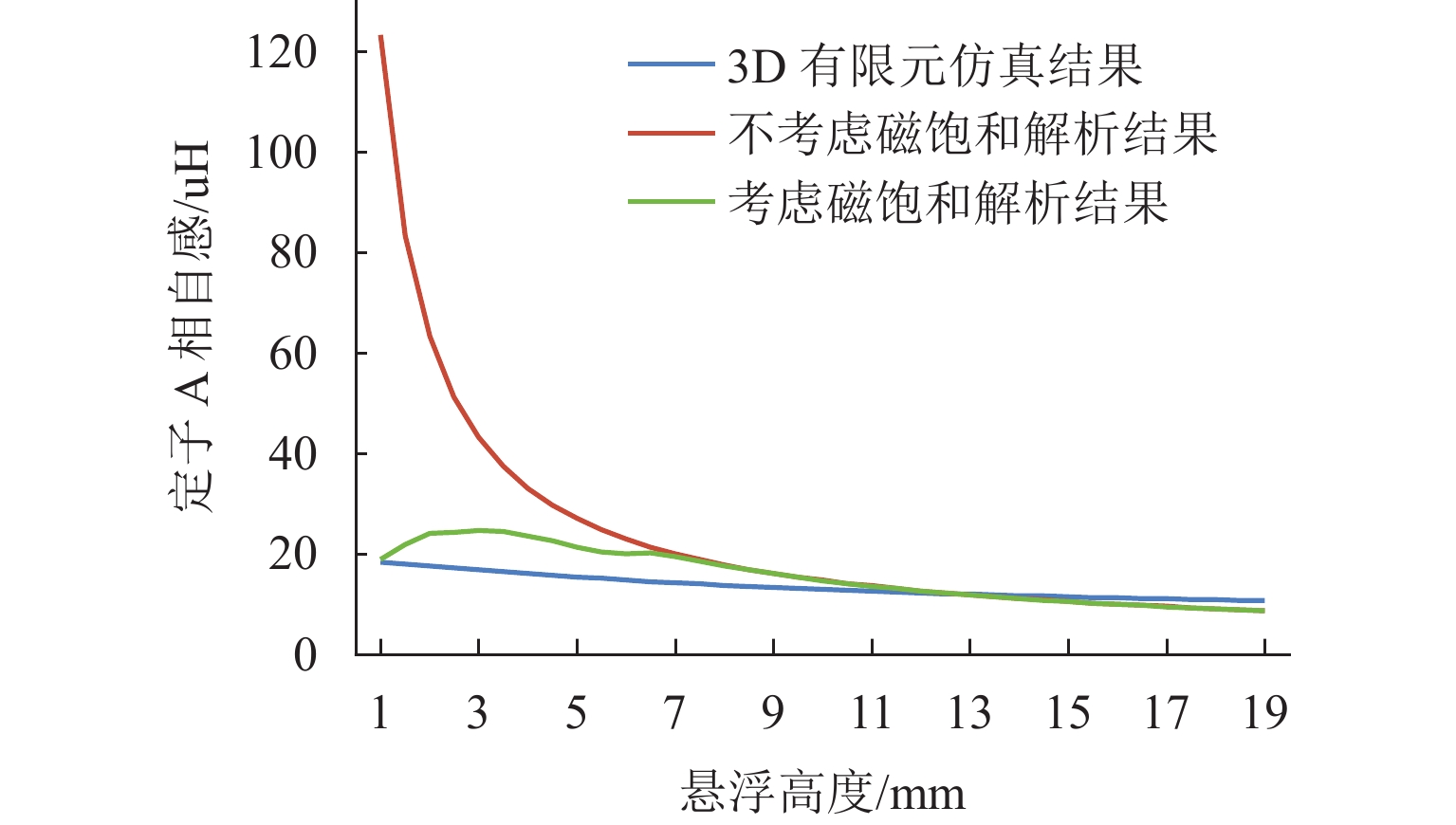
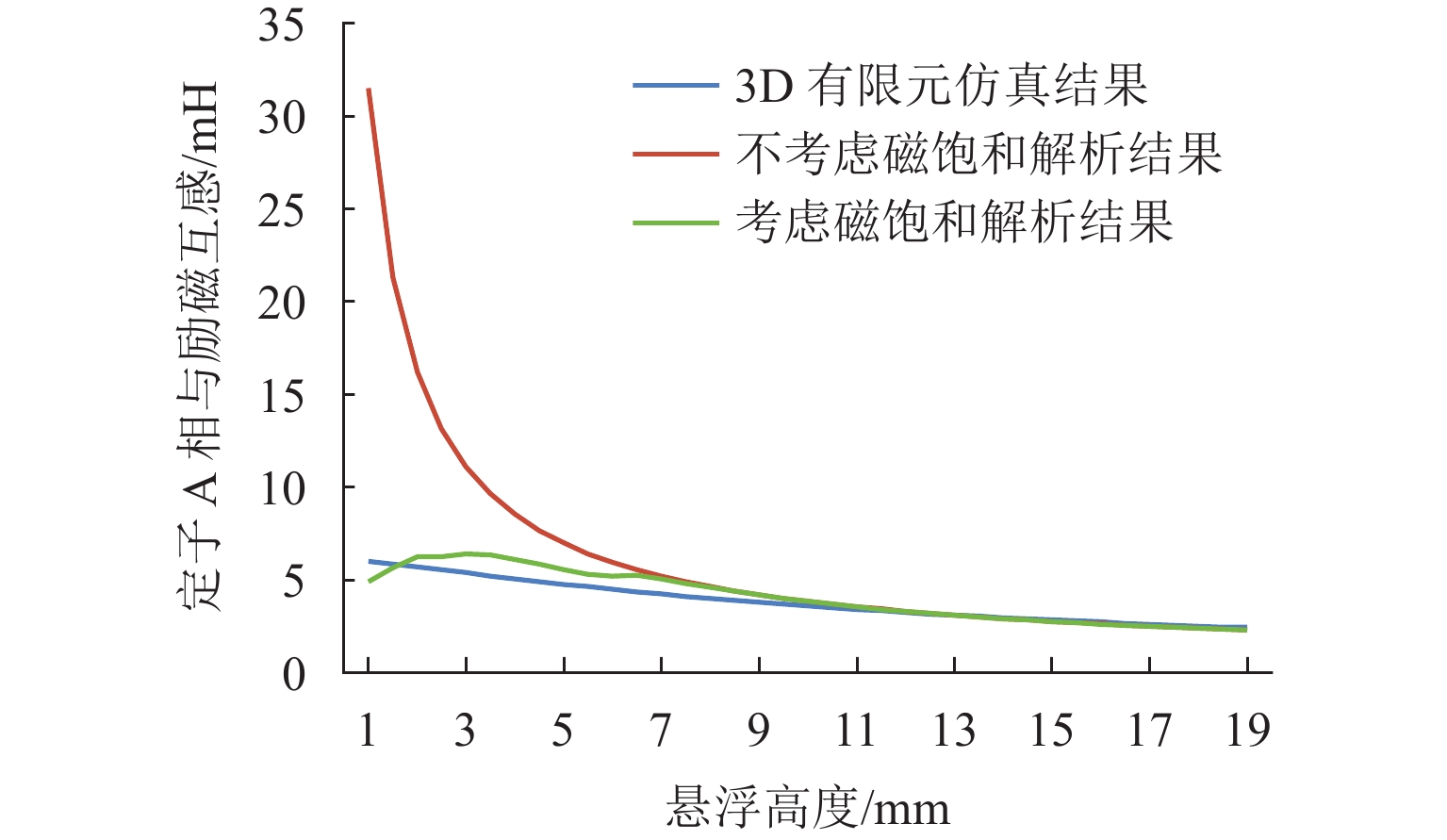
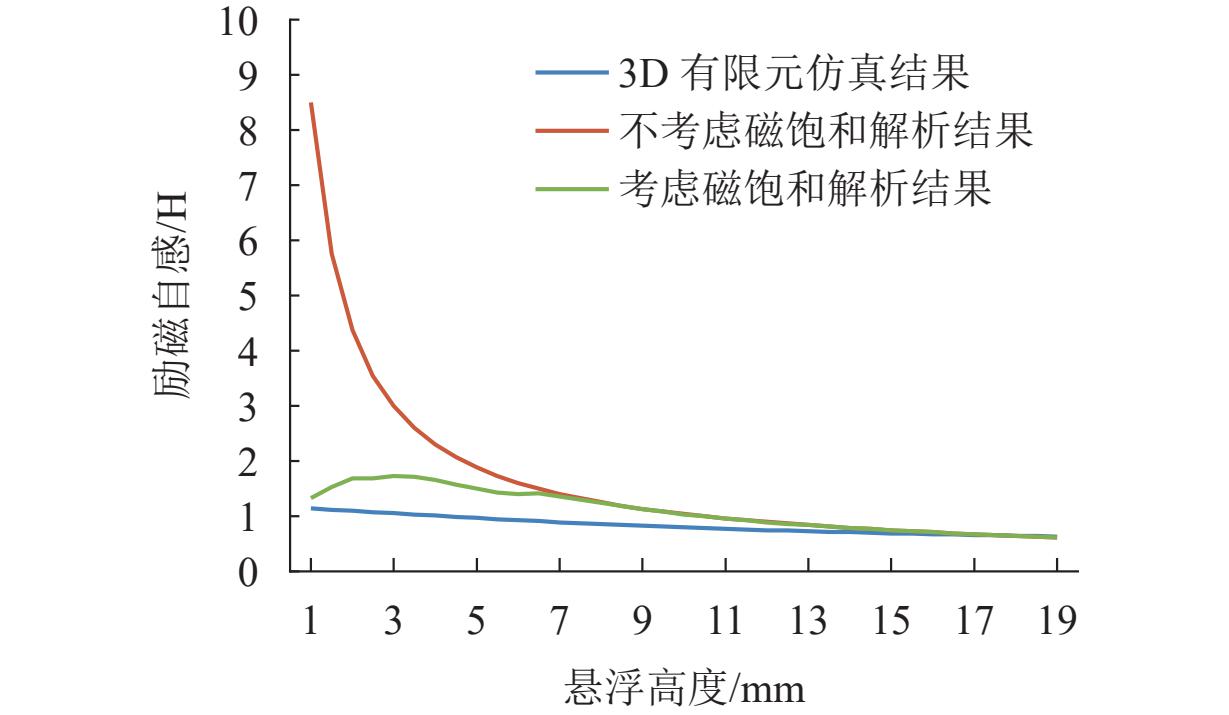
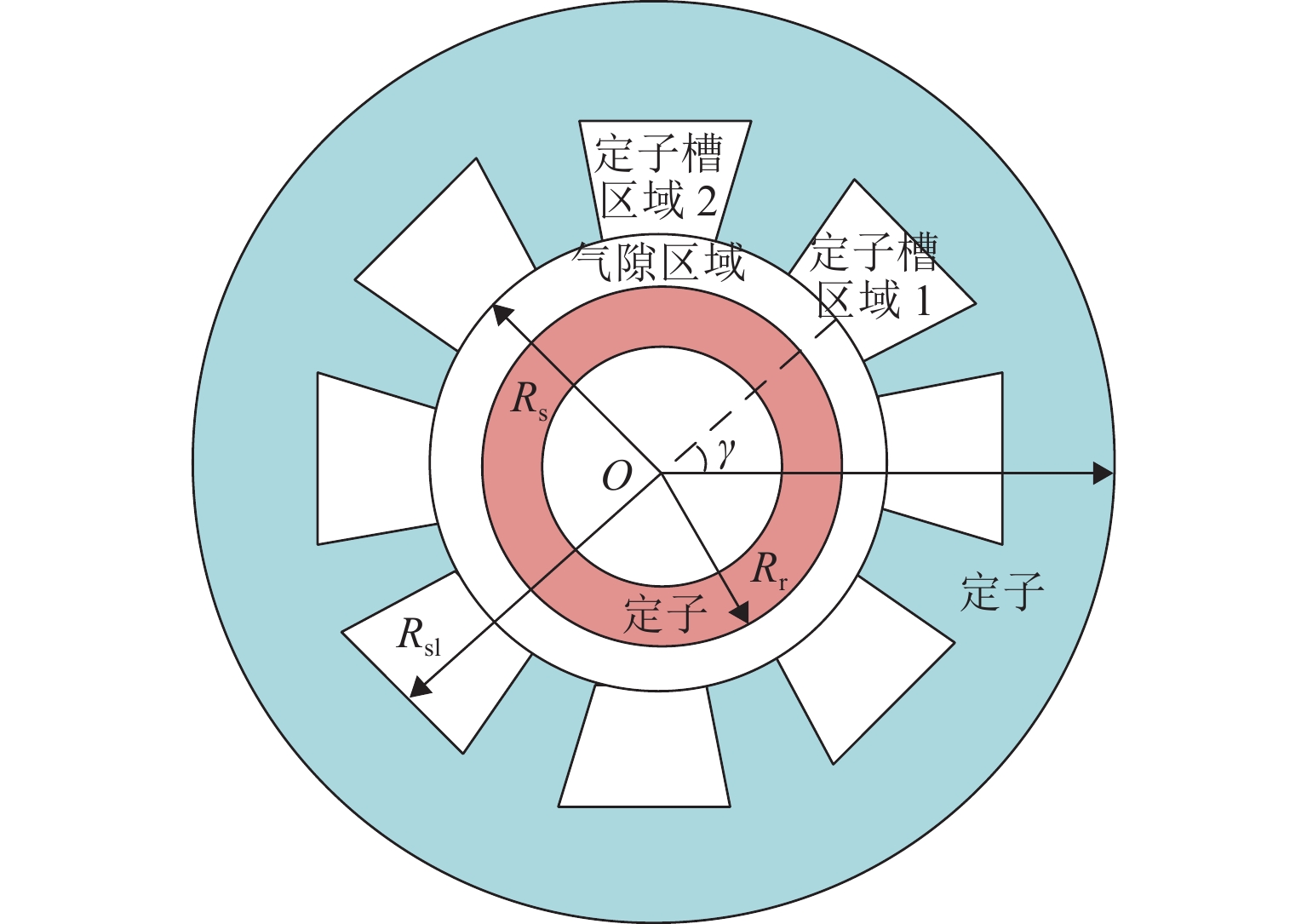
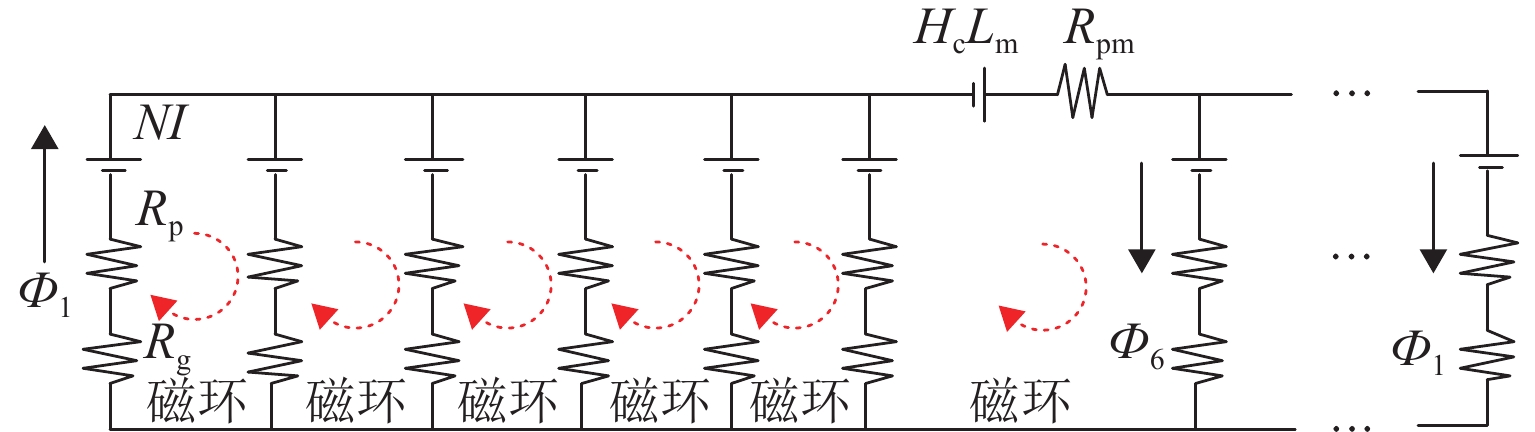
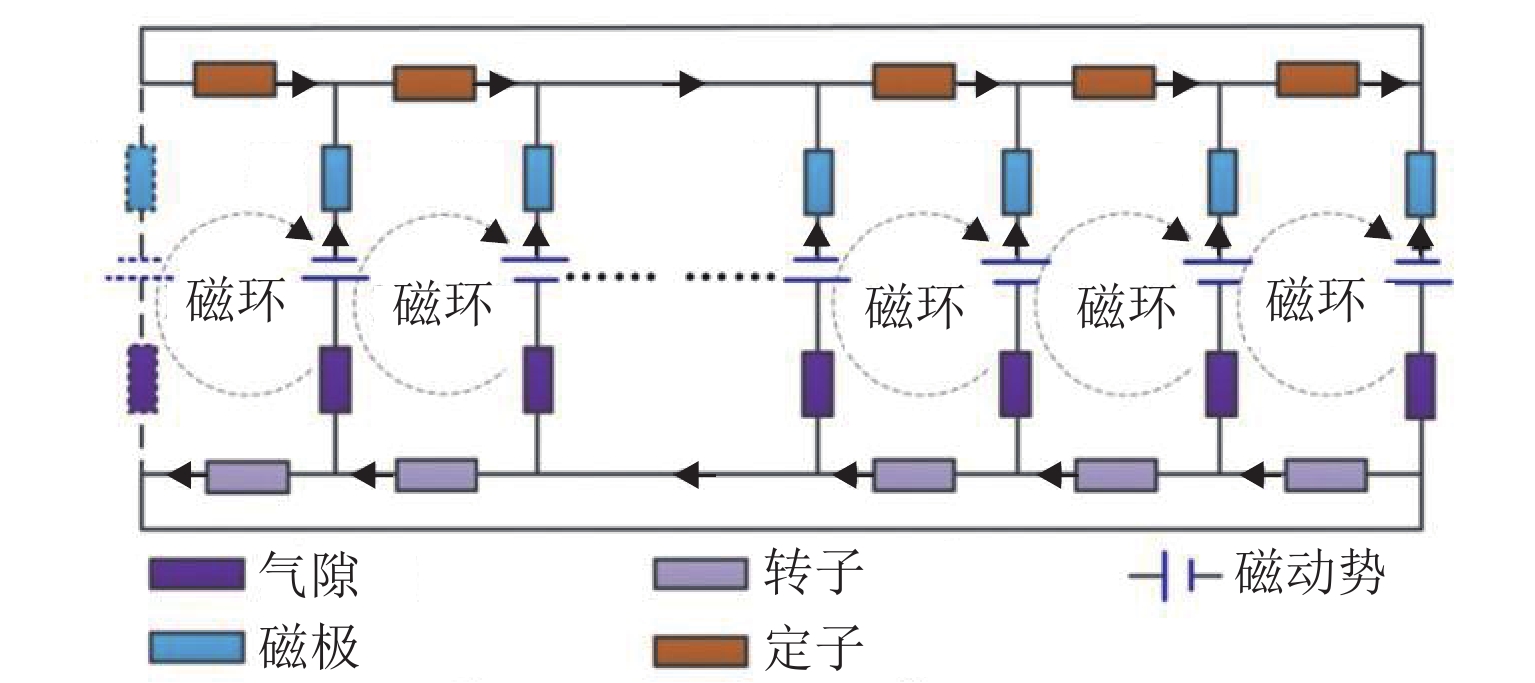
The increase in speed of normal conducting magnetic levitation trains leads to an increased fluctuation range of the levitation air gap, making the motor’s magnetic field more likely to enter the saturation region, which aggravates the nonlinearity of the iron core’s magnetic reluctance and weakens the accuracy of the conventional magnetic circuit method parameter model. Therefore, an analytical parameter modeling method for normal conducting high-speed magnetic levitation motors considering the influence of magnetic saturation was proposed to improve the calculation accuracy of the parameter model for long-stator linear synchronous motors. First, an equivalent air gap model considering the variation in the iron core’s magnetic reluctance was constructed based on the magnetic circuit method. Second, combined with finite element magnetic field data, a dynamic characterization method for the magnetization effect based on differential permeability was adopted to obtain the relative permeability of the iron core material, realizing the quantitative description of the magnetic saturation degree. Finally, the dynamic differential permeability was combined with the equivalent air gap model to establish a motor parameter model capable of reflecting multiple factors such as iron core saturation, slotting effect, and air gap variation, and its accuracy was verified. The research results indicate that under the magnetic saturation state, the parameter model by the conventional magnetic circuit method exhibits significant distortion, with the relative errors of various inductance parameters generally exceeding 45%. After introducing the equivalent air gap and the magnetization characterization method based on differential permeability, the response capability of the model to the iron core’s magnetic reluctance and different saturation degrees is enhanced, and the parameter prediction accuracy is improved. By taking a suspension height of 5 mm as an example, the prediction accuracies of the stator self-inductance, the mutual inductance between stator and excitation, and the excitation self-inductance are improved by 39.43%, 30.14%, and 40.11%, respectively.
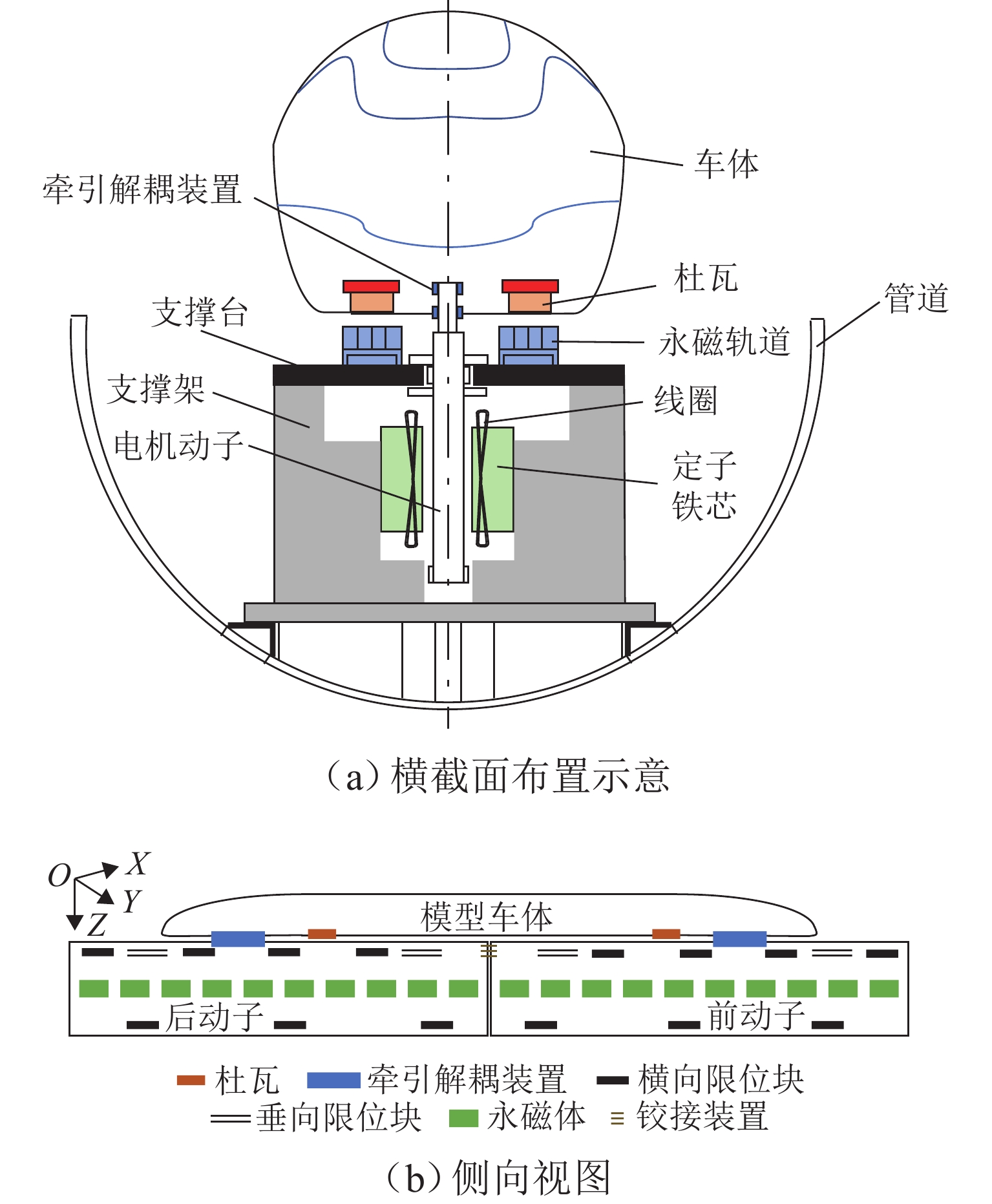
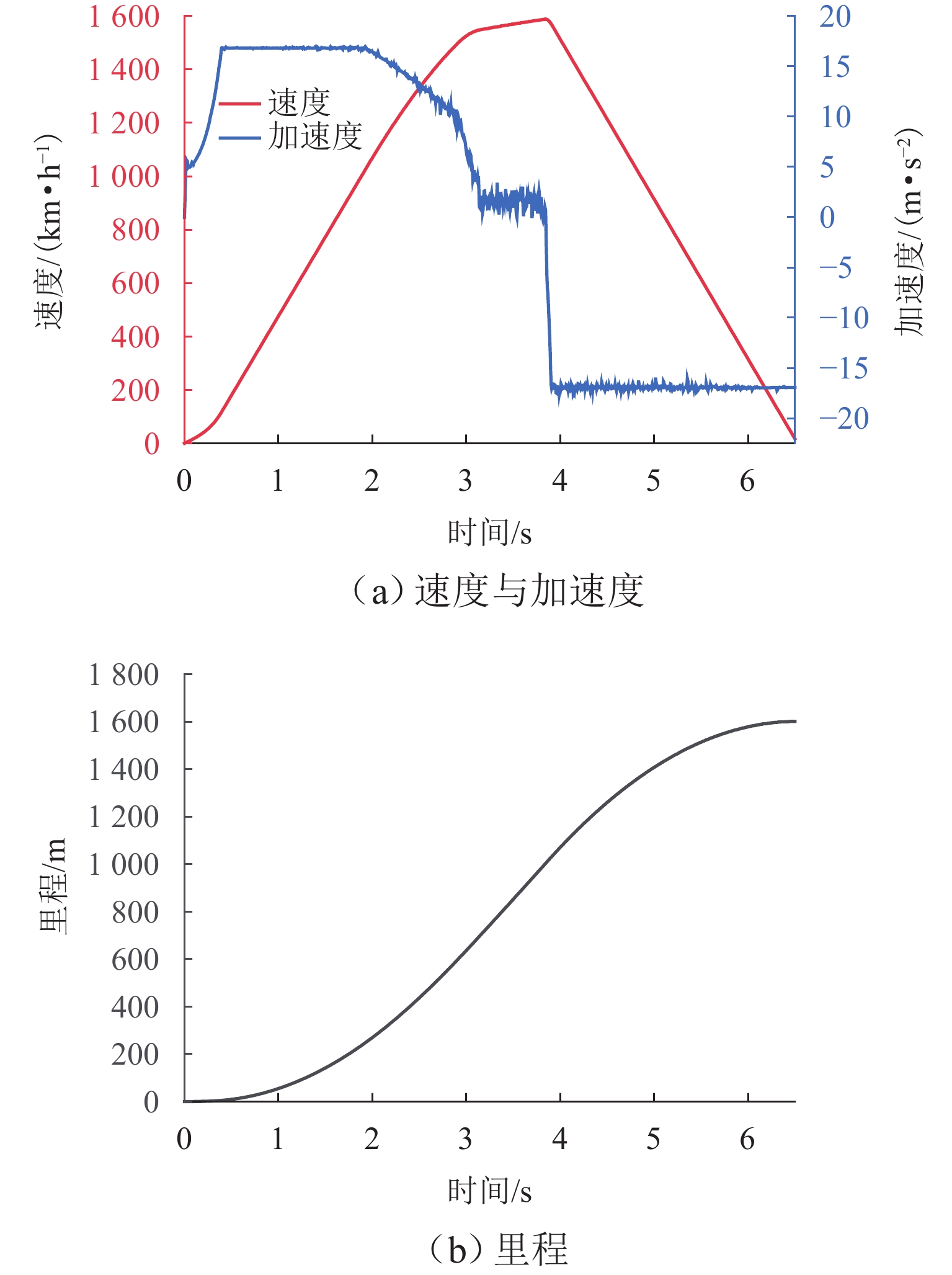
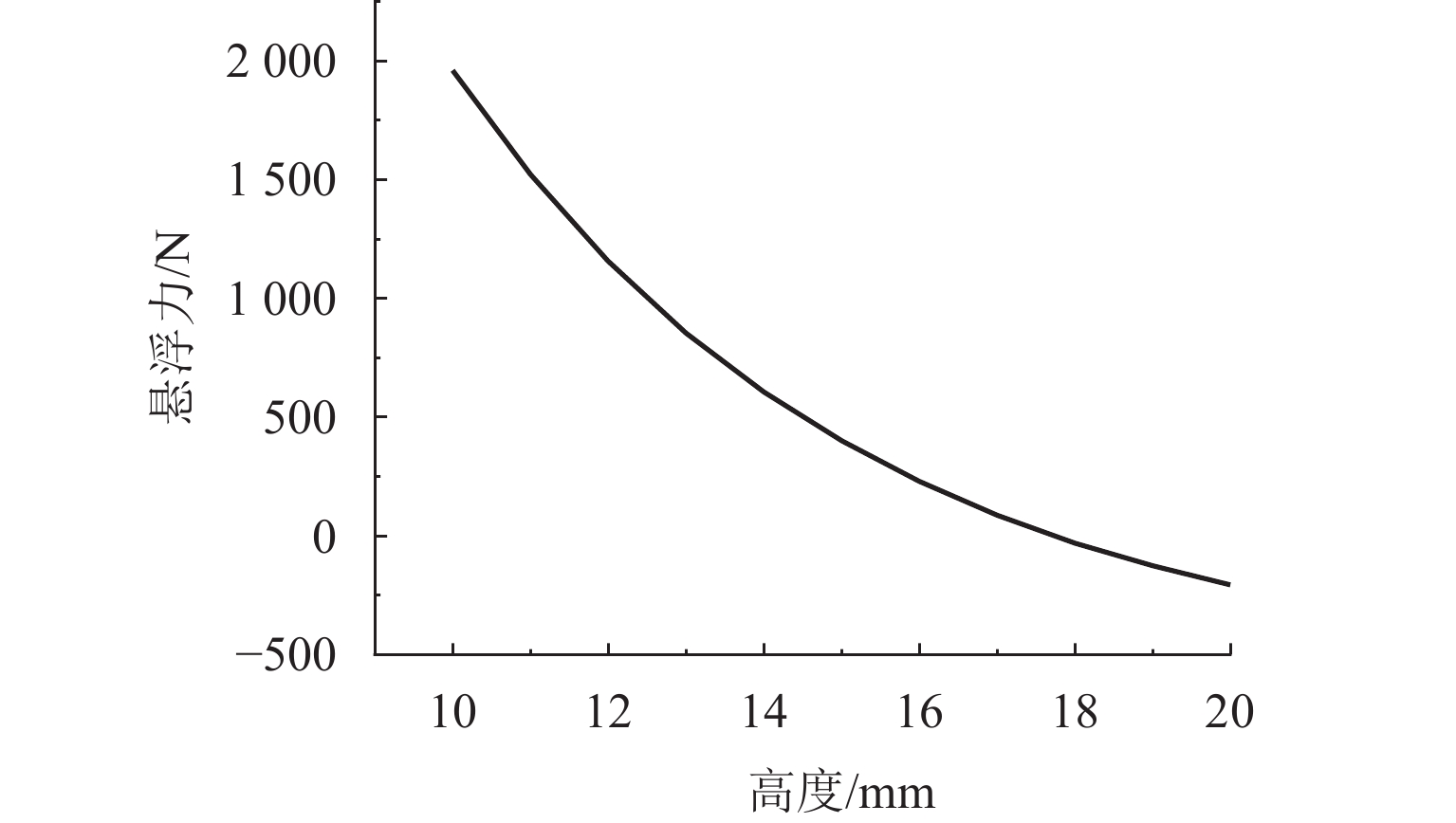
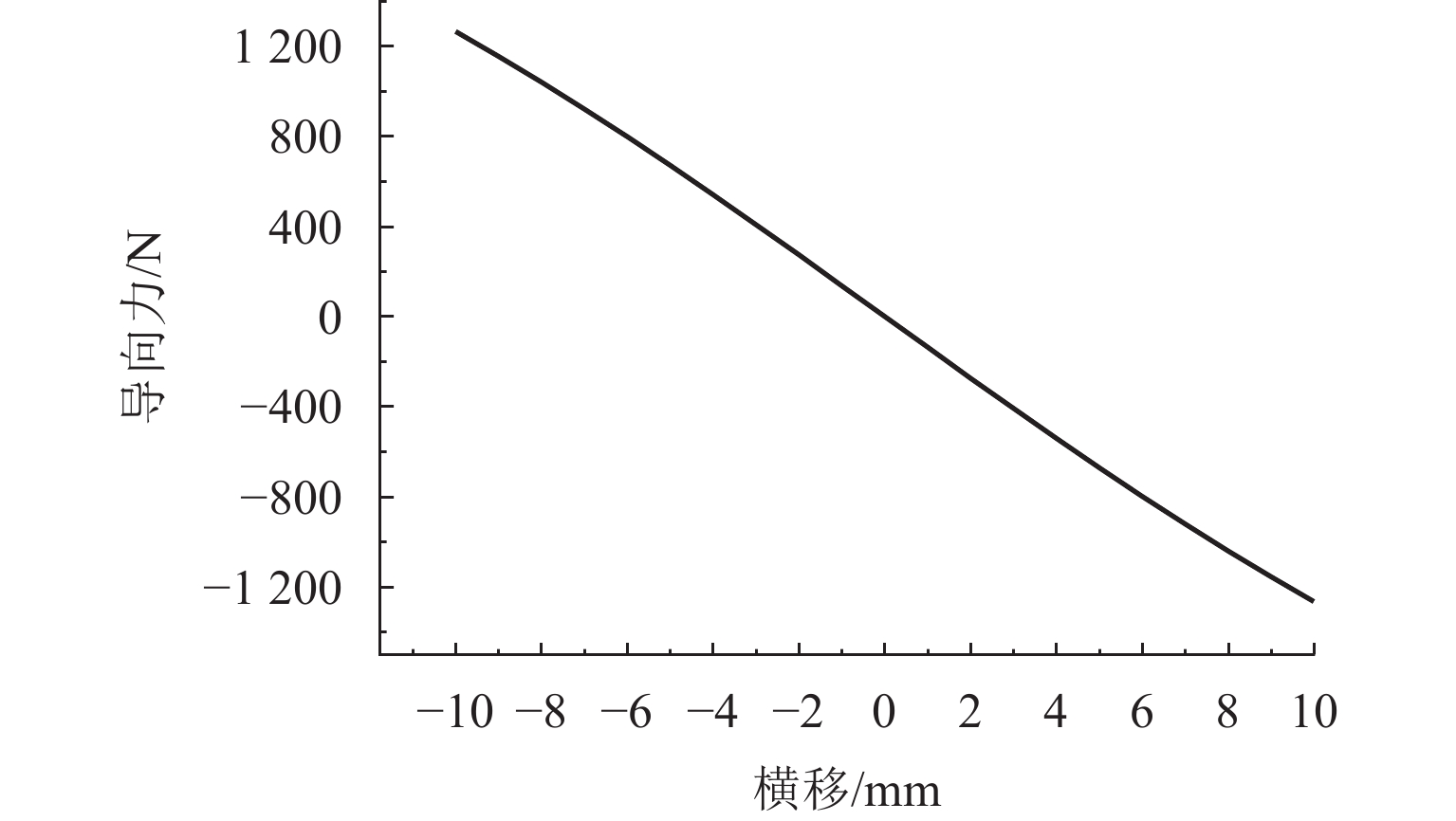
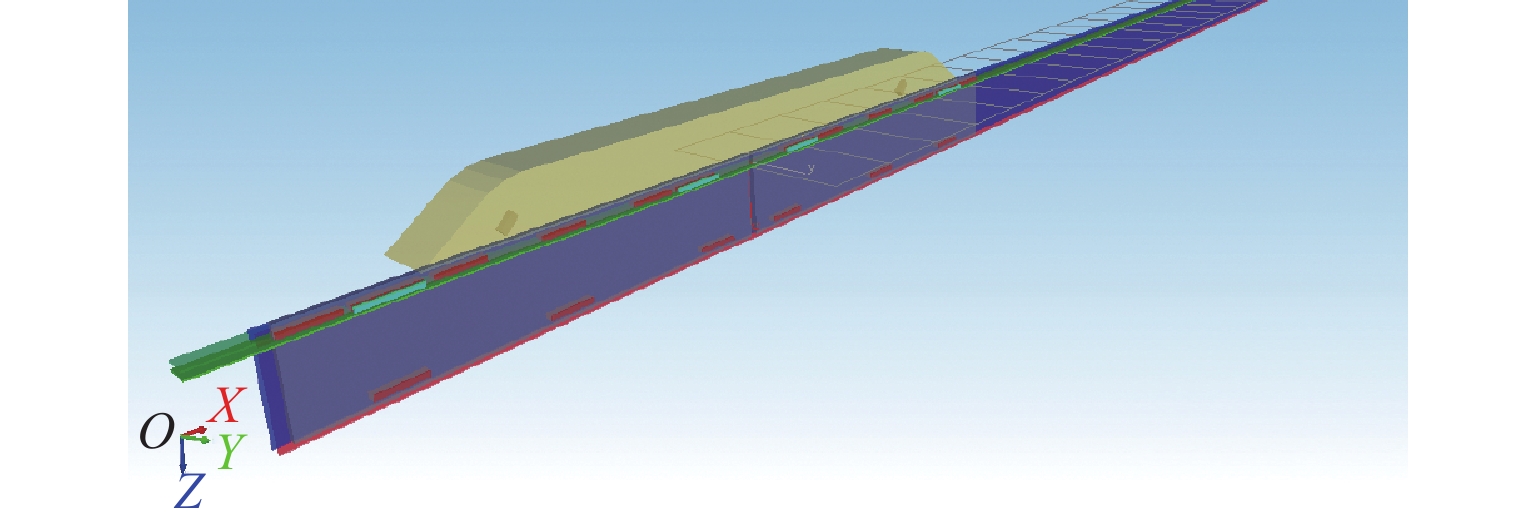
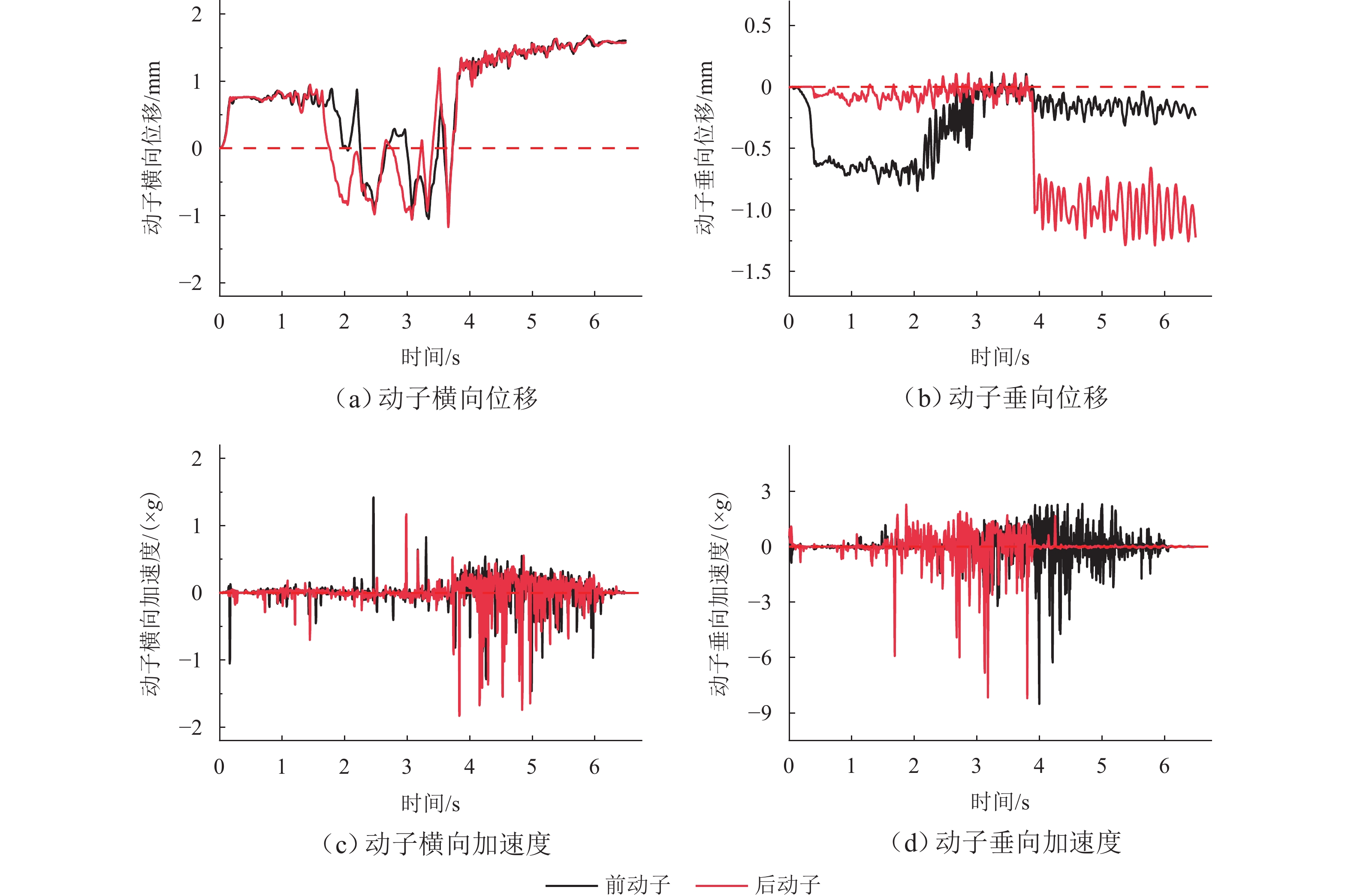
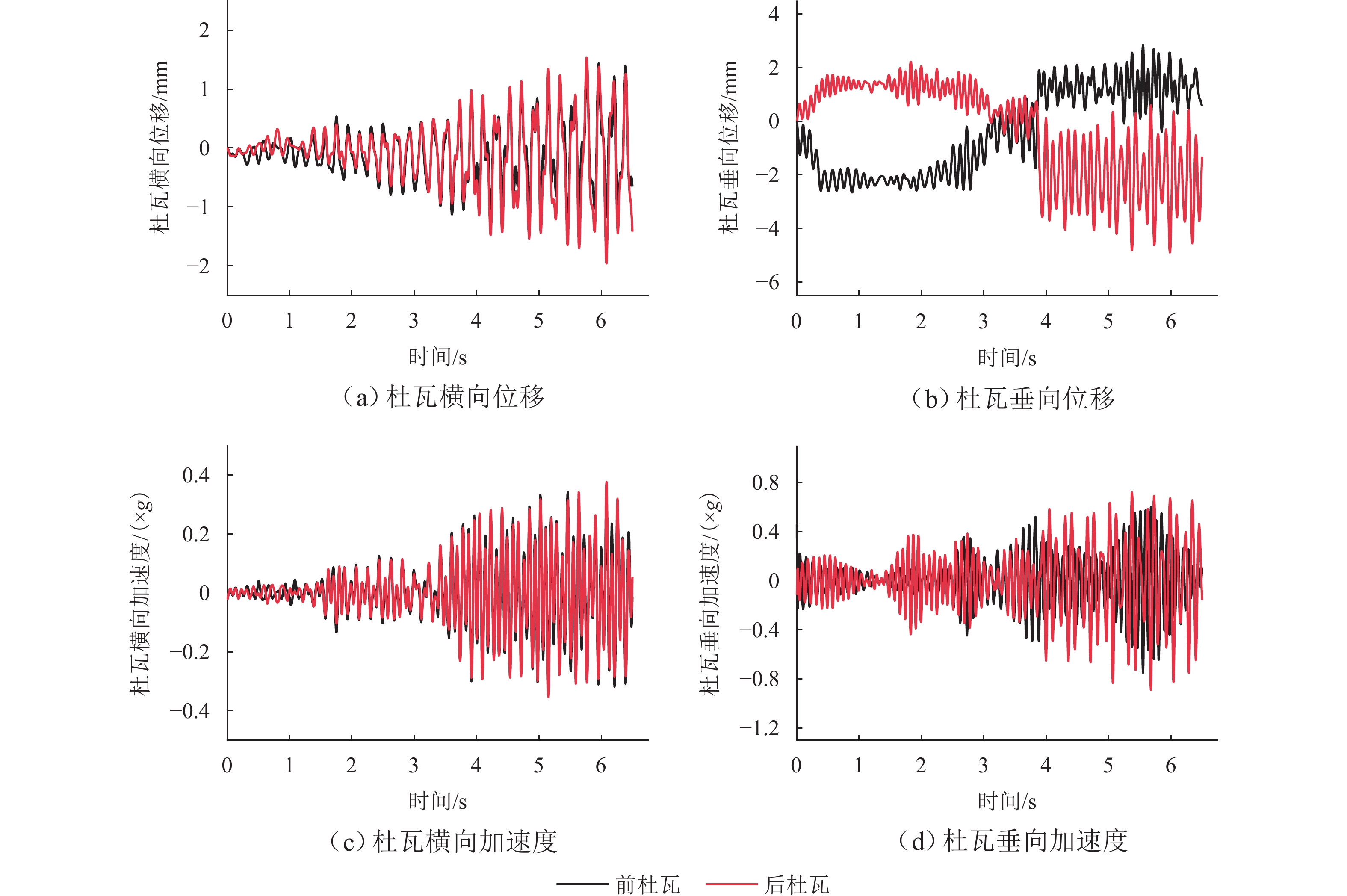
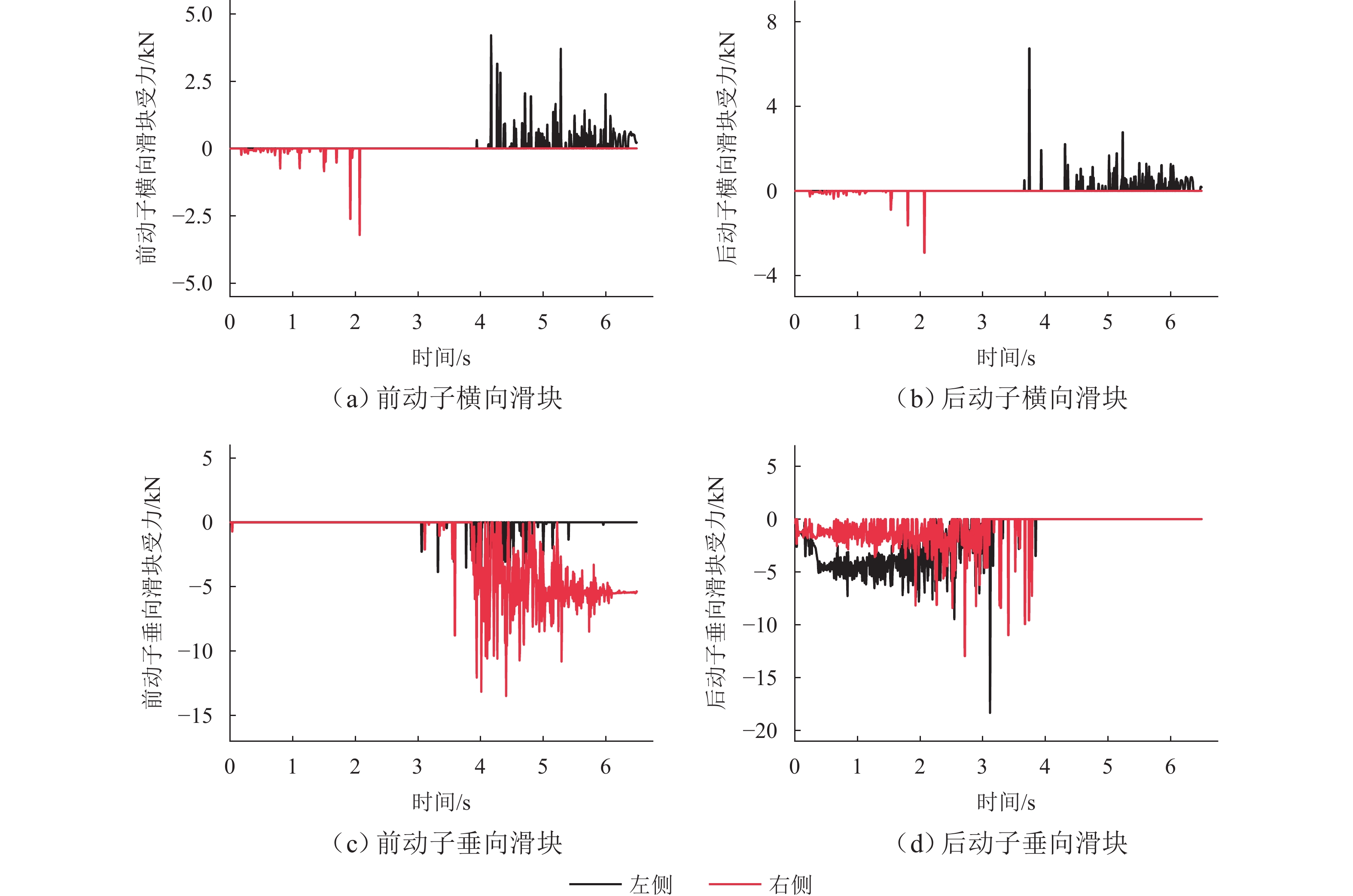
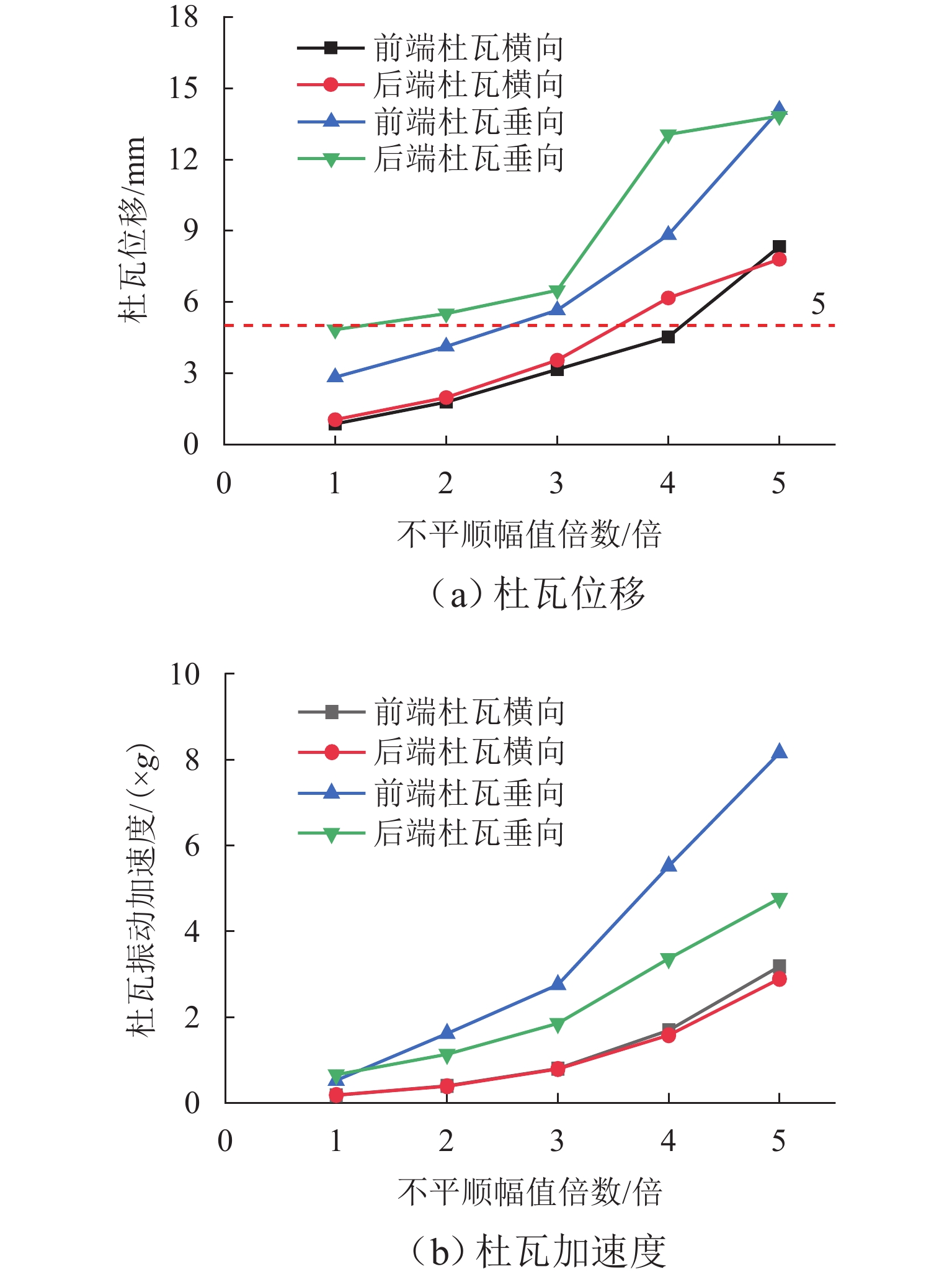
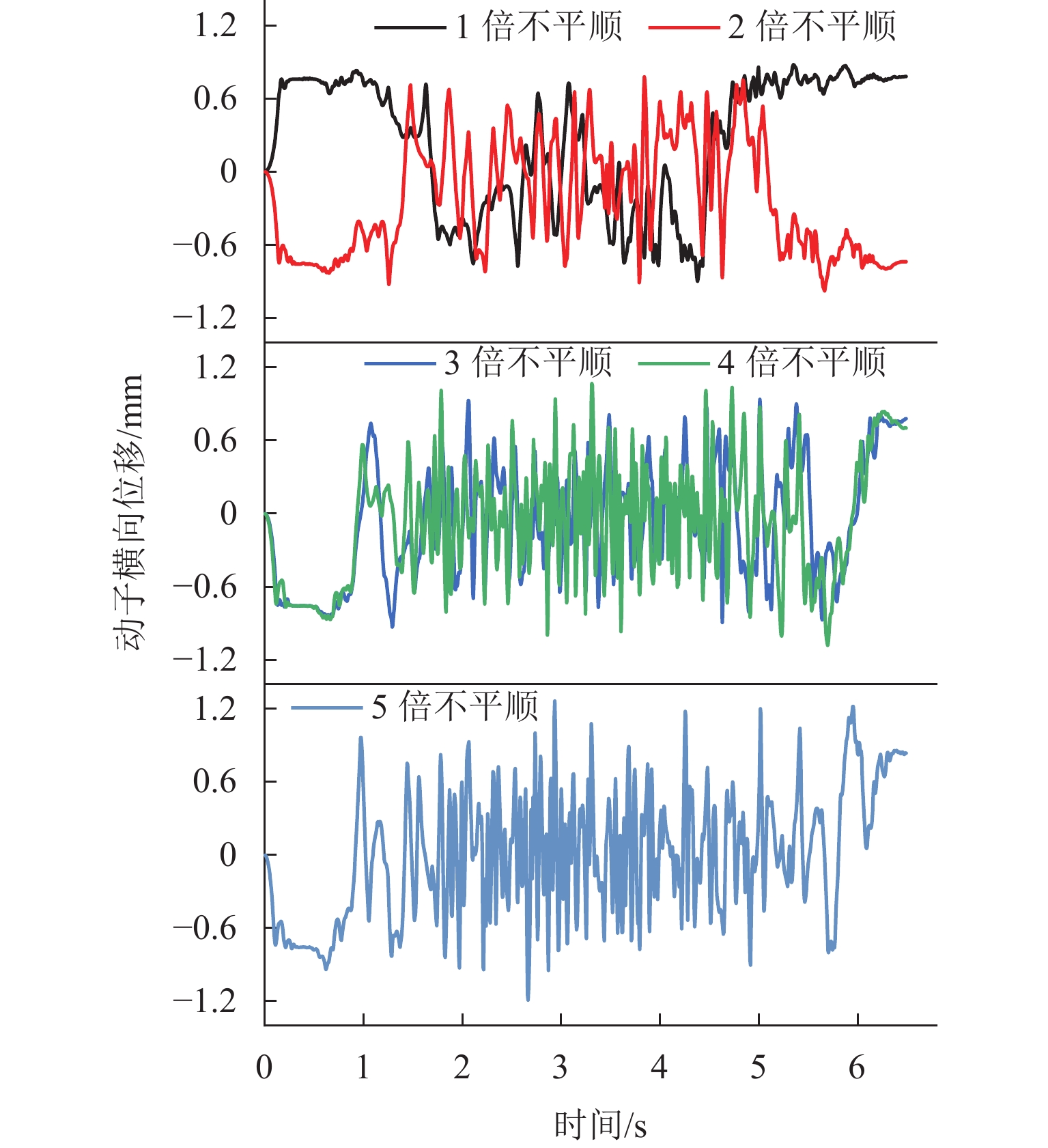
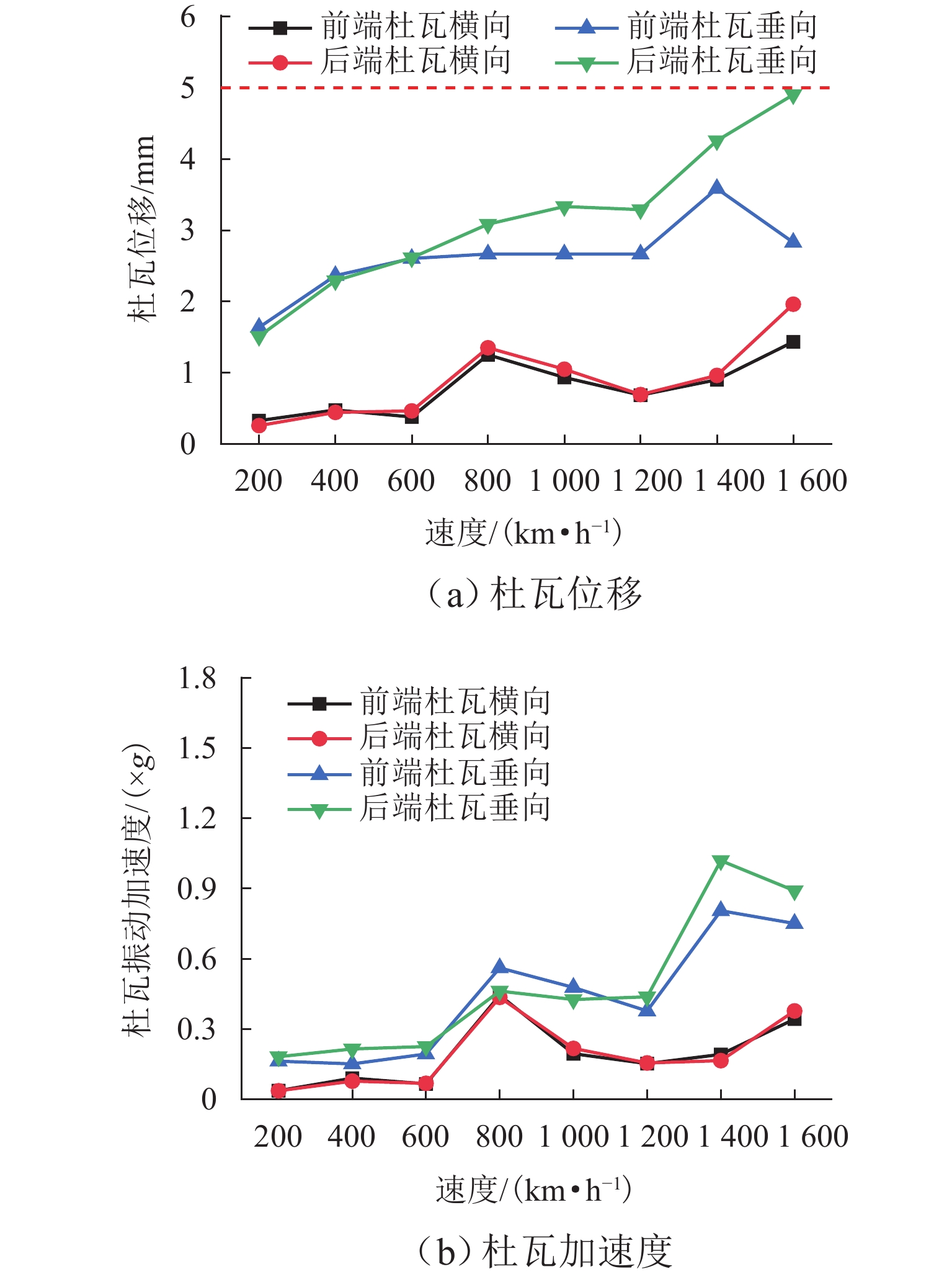
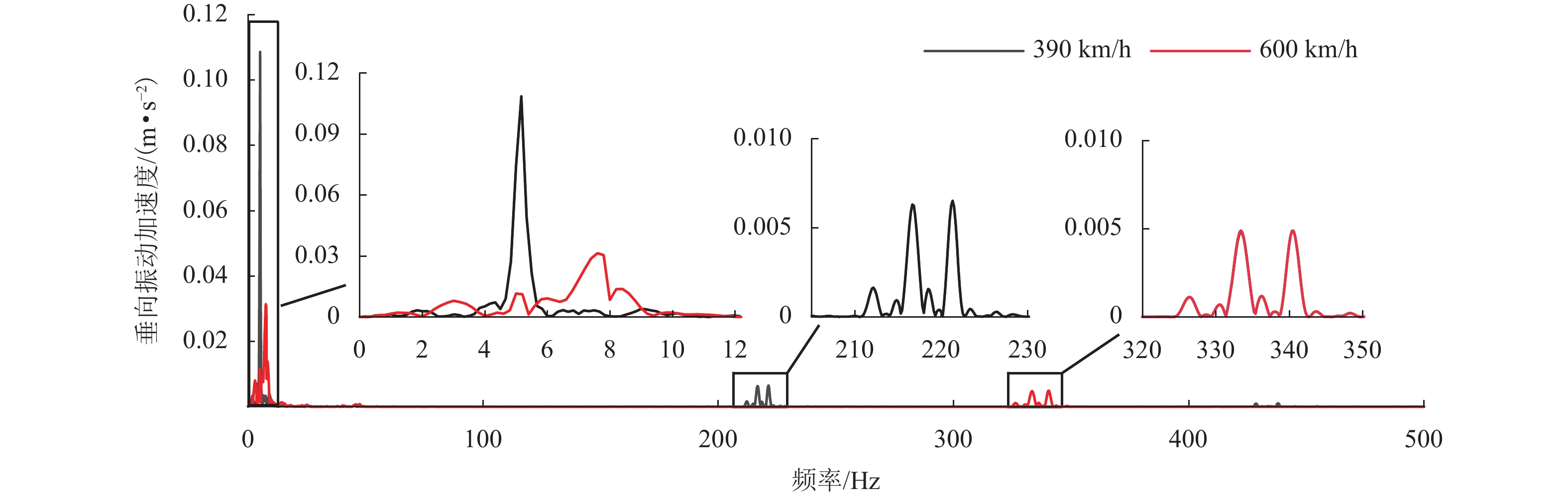
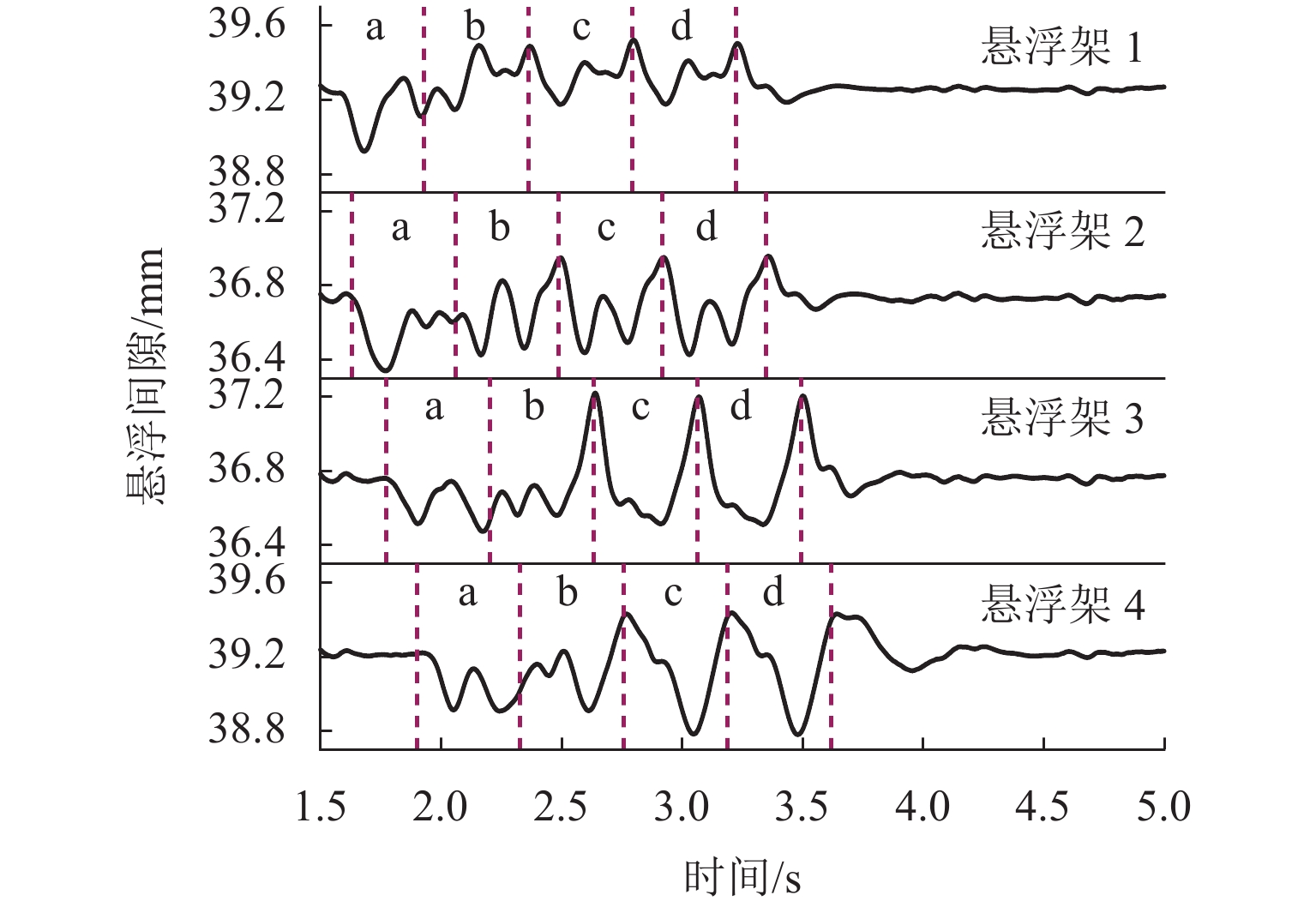
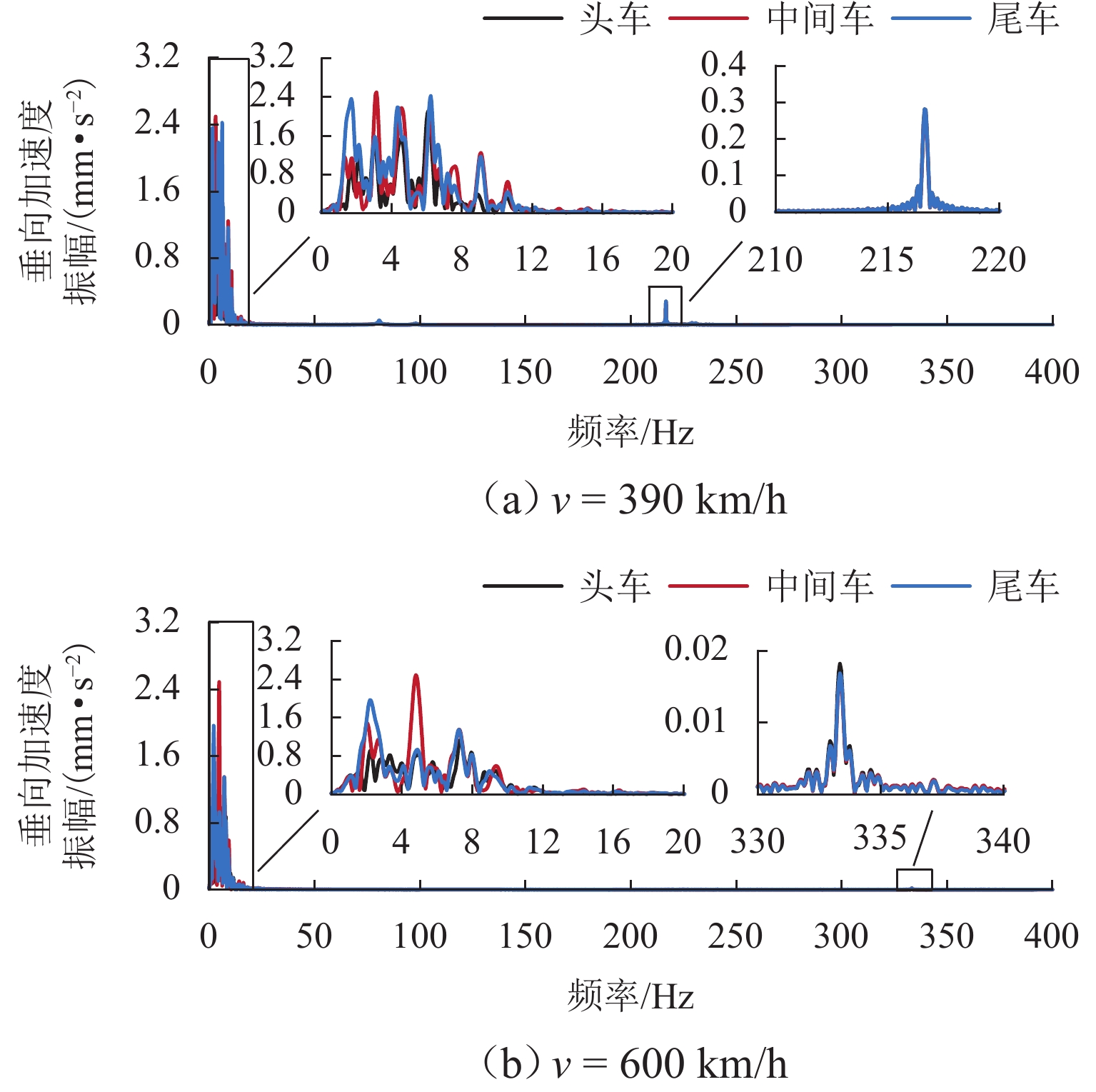
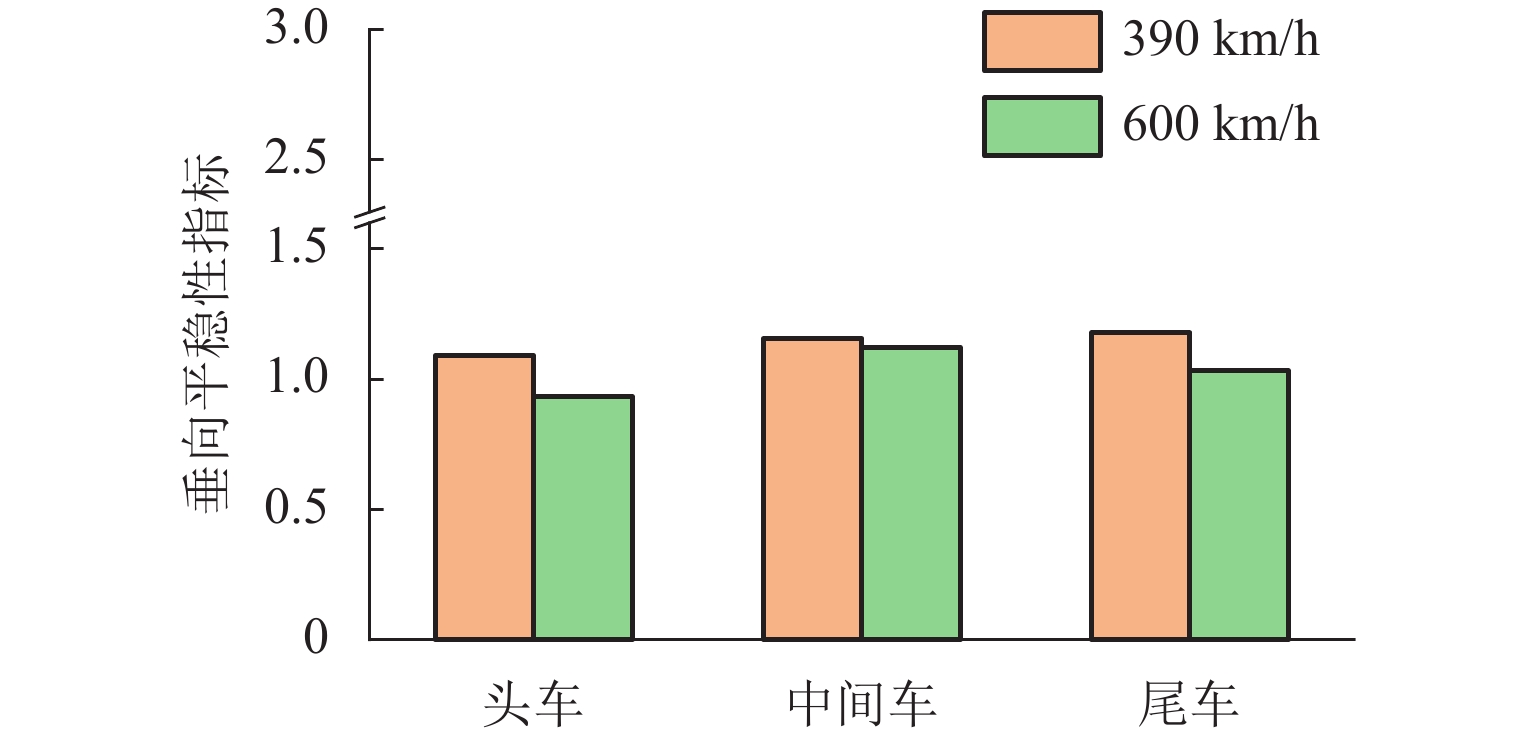
When maglev vehicles operate at an ultra-high speed, boundary conditions such as track irregularity and air resistance significantly affect the operational safety and stability of the vehicles. Based on the polymorphic coupled dynamic simulation test platform for rail transit, a dynamic model of an ultra-high-speed maglev model vehicle system was established, which considered conditions including superconducting pinning suspension and guiding force characteristics, air resistance, and track irregularity. The traction, coasting, and braking conditions achieving a maximum speed of
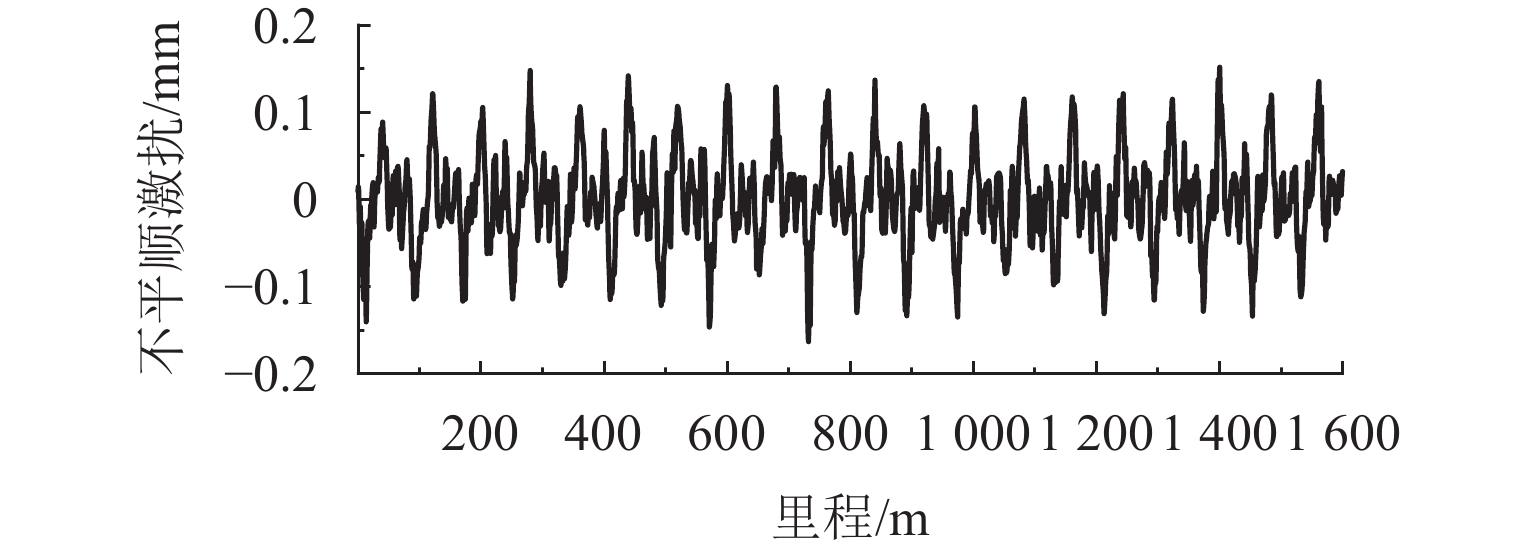
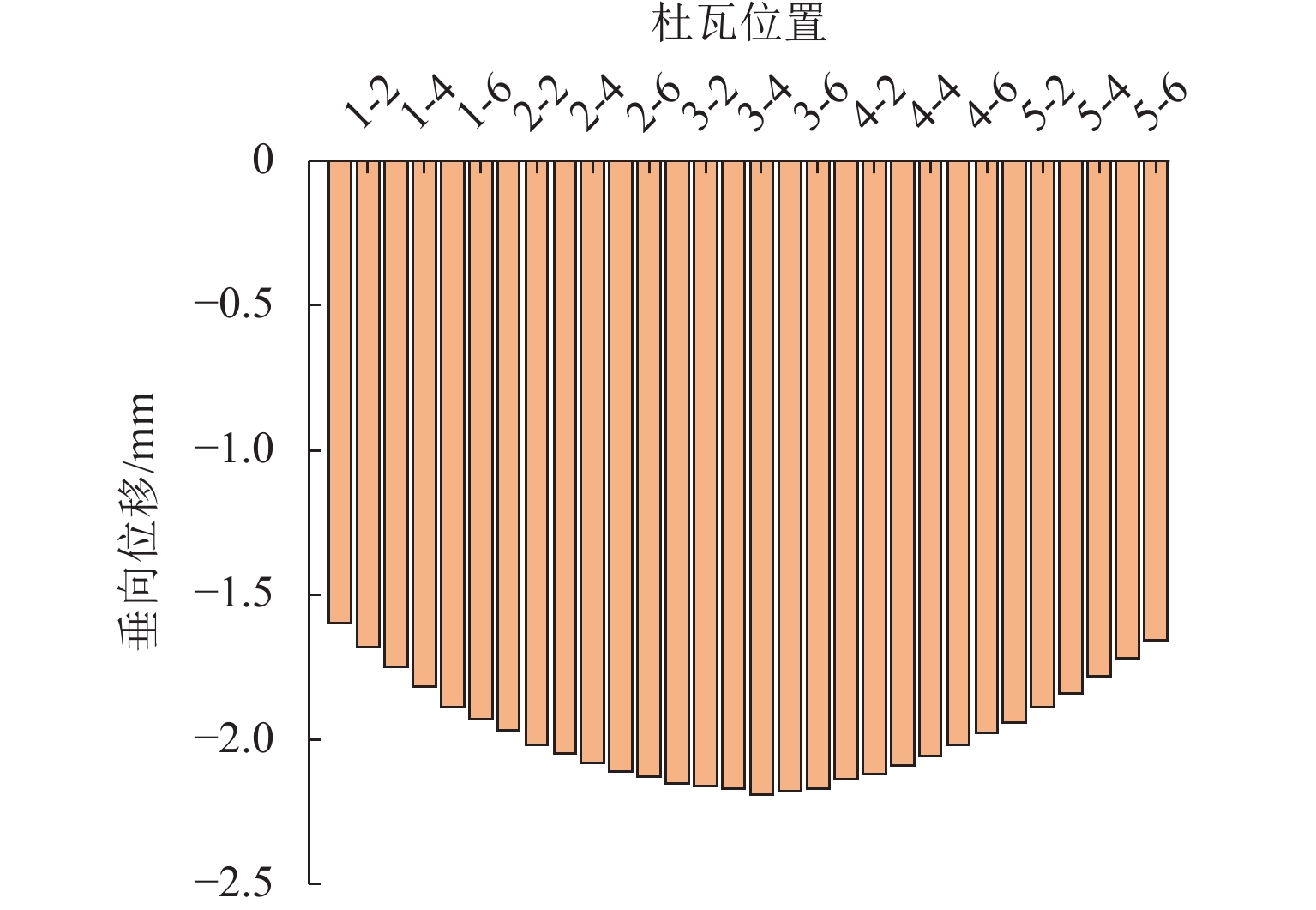
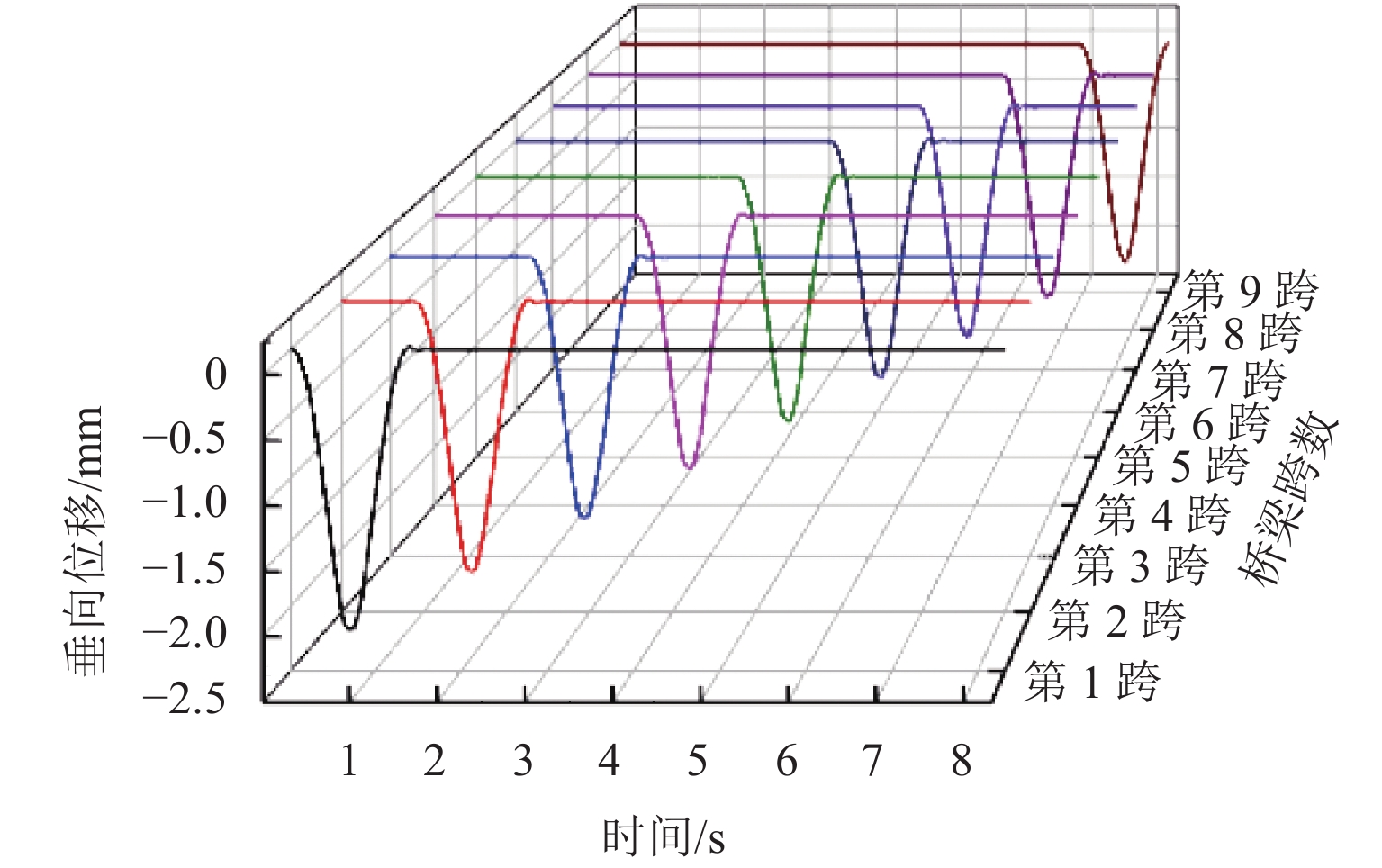
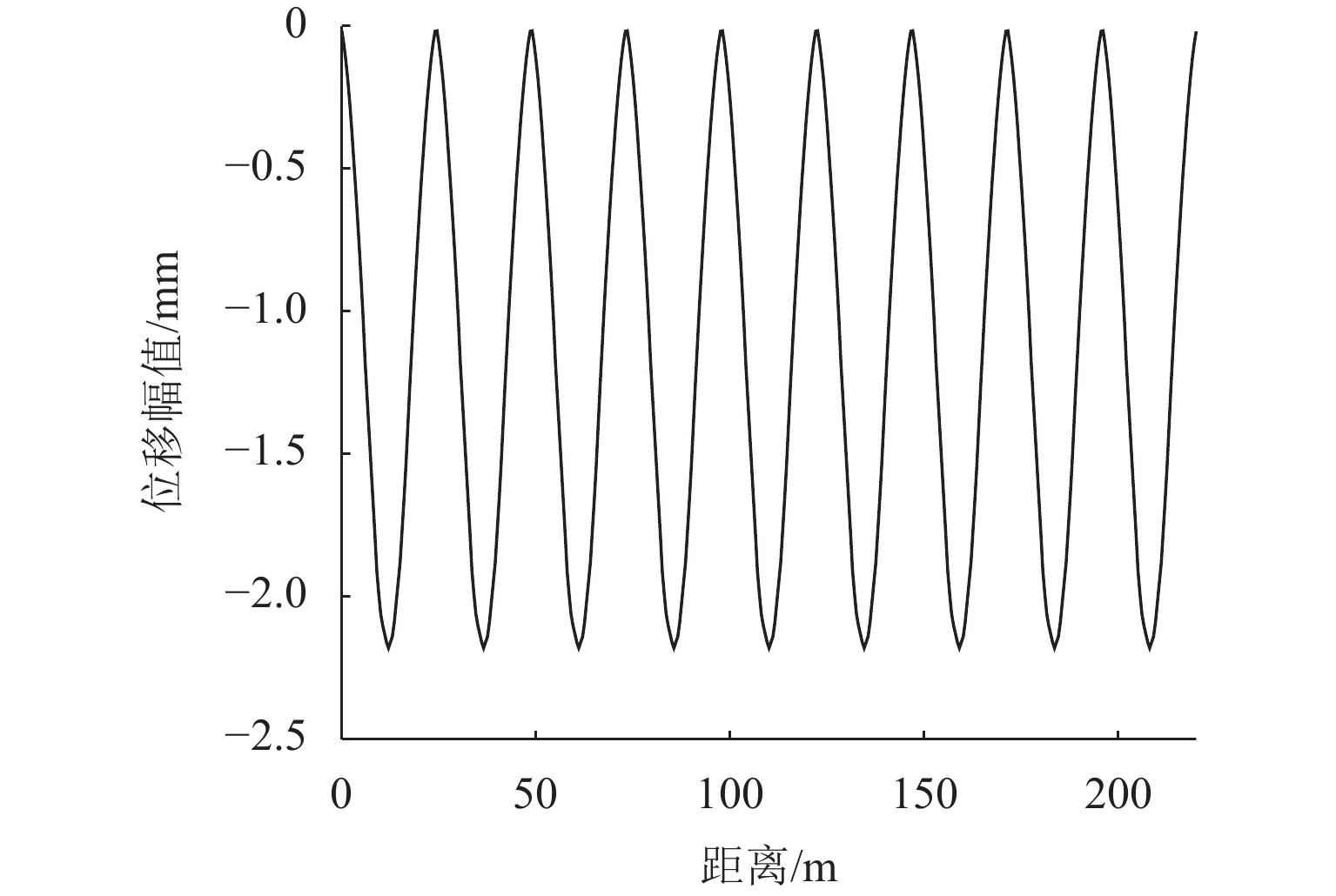
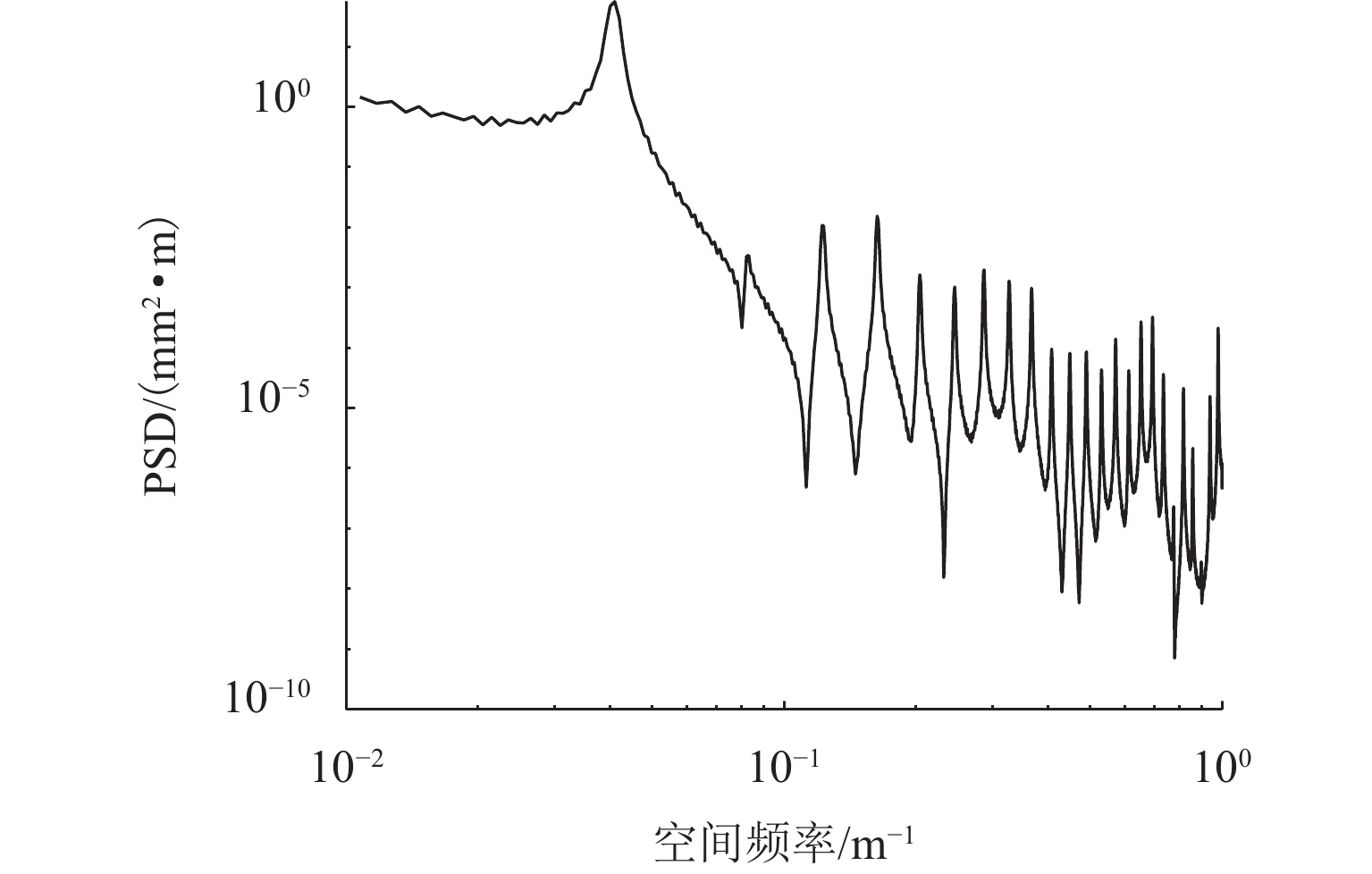
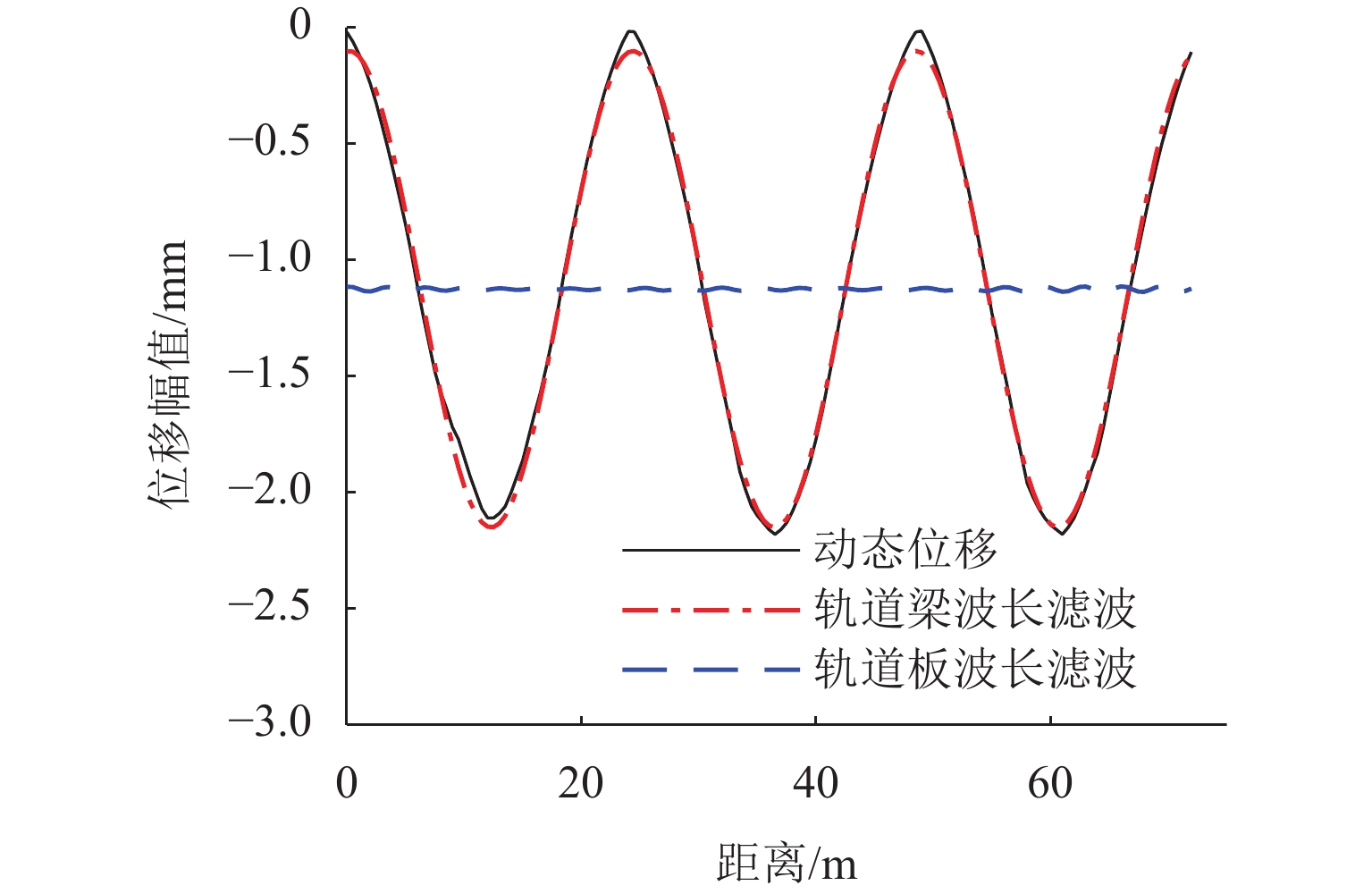
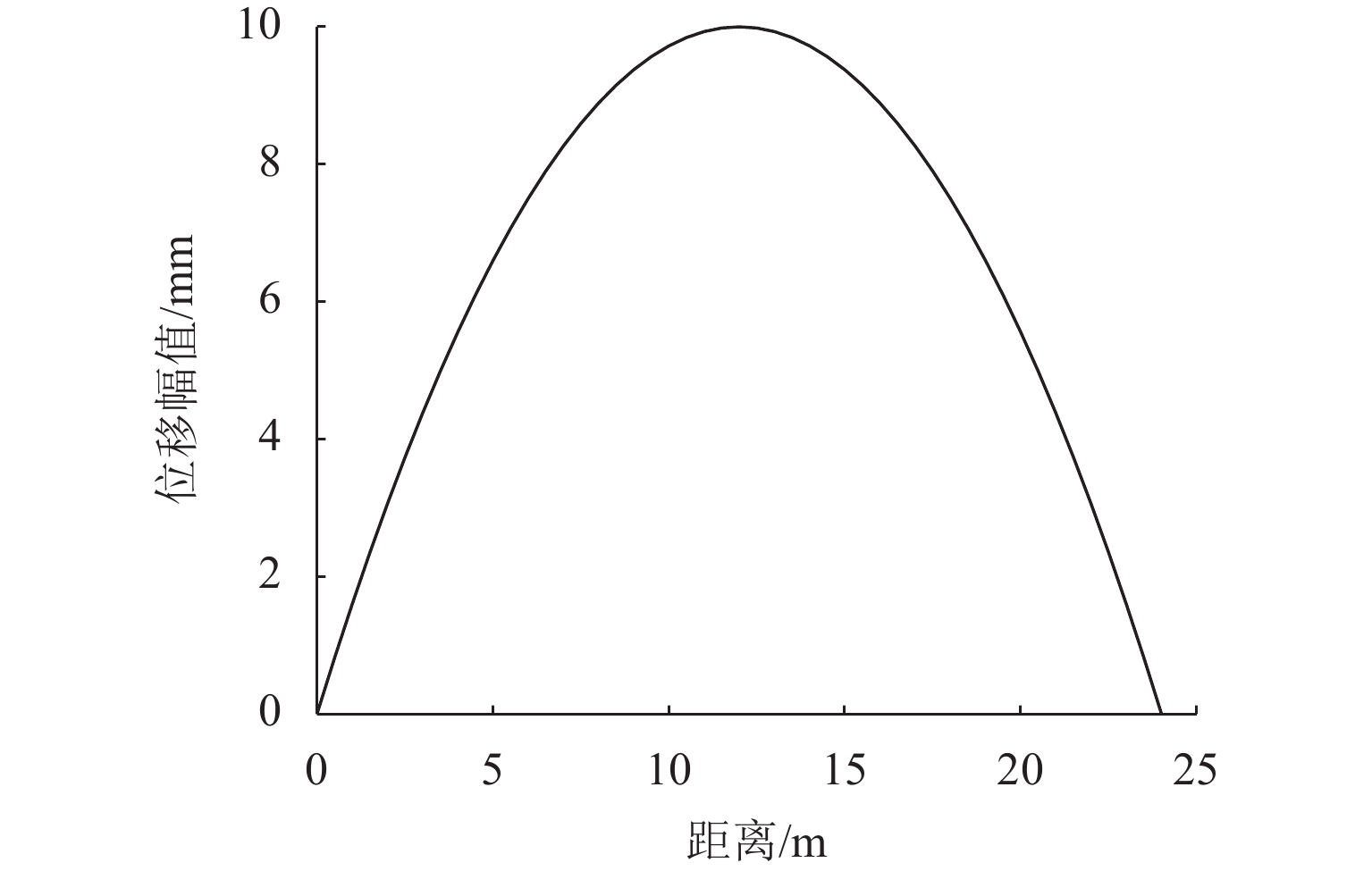
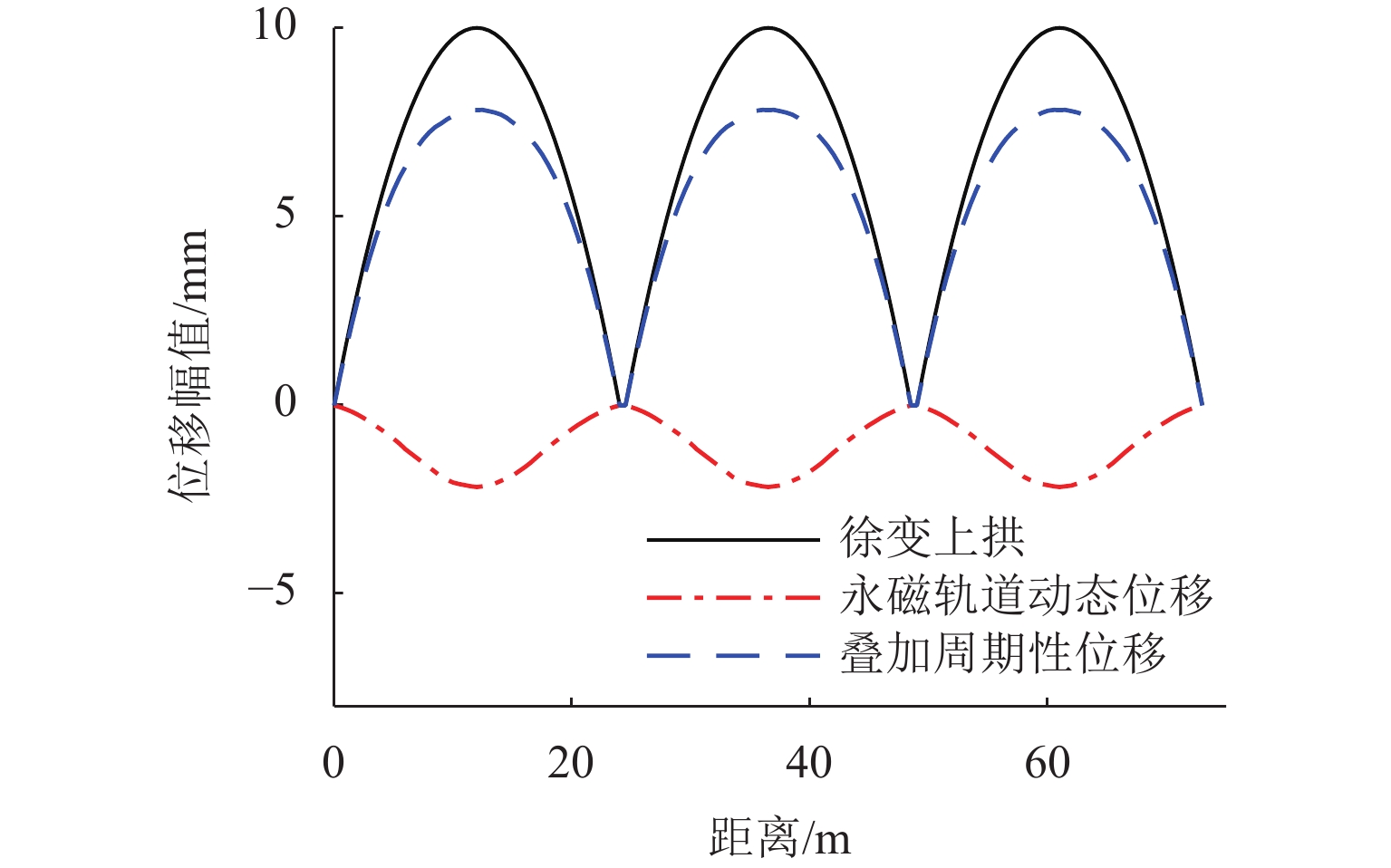
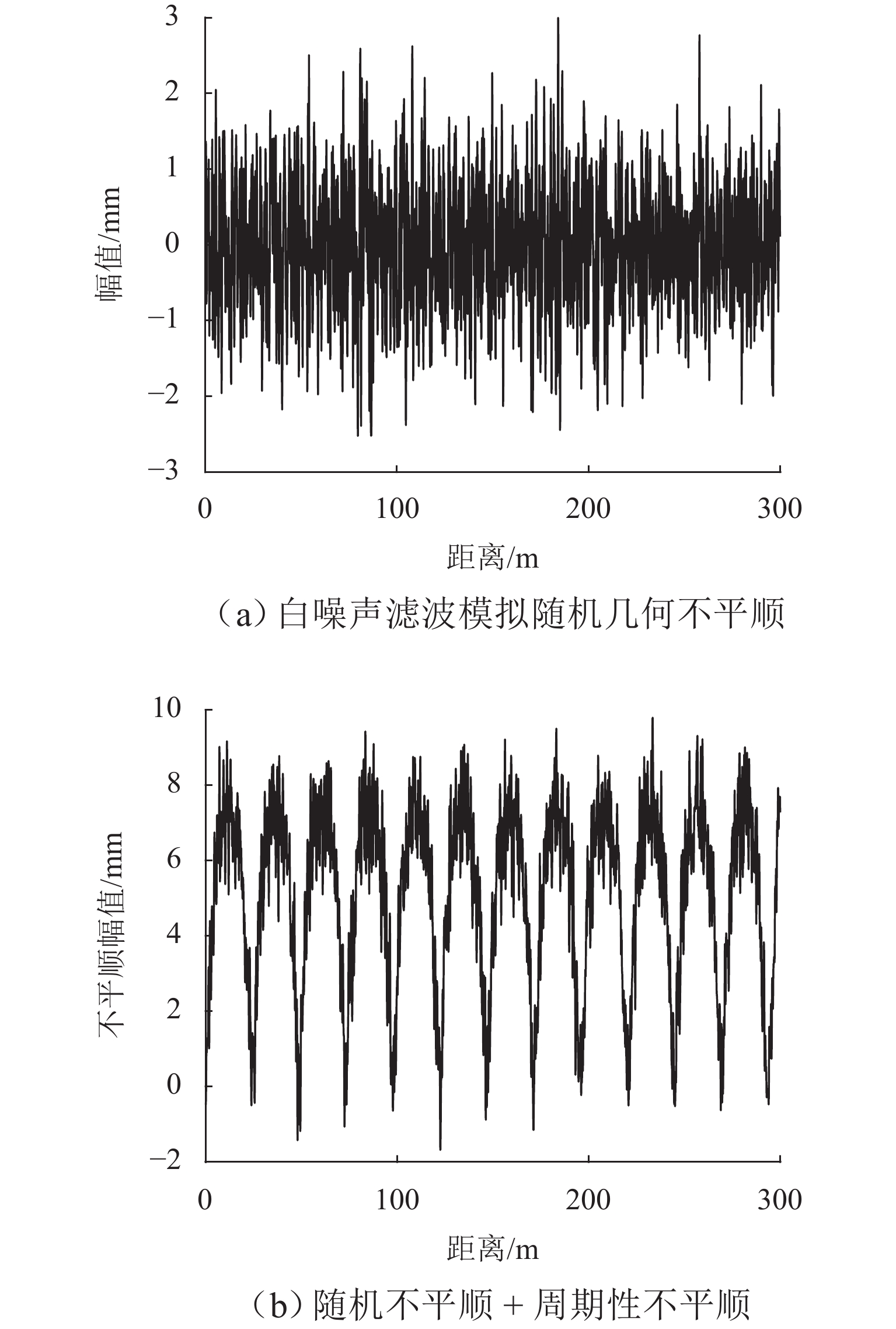
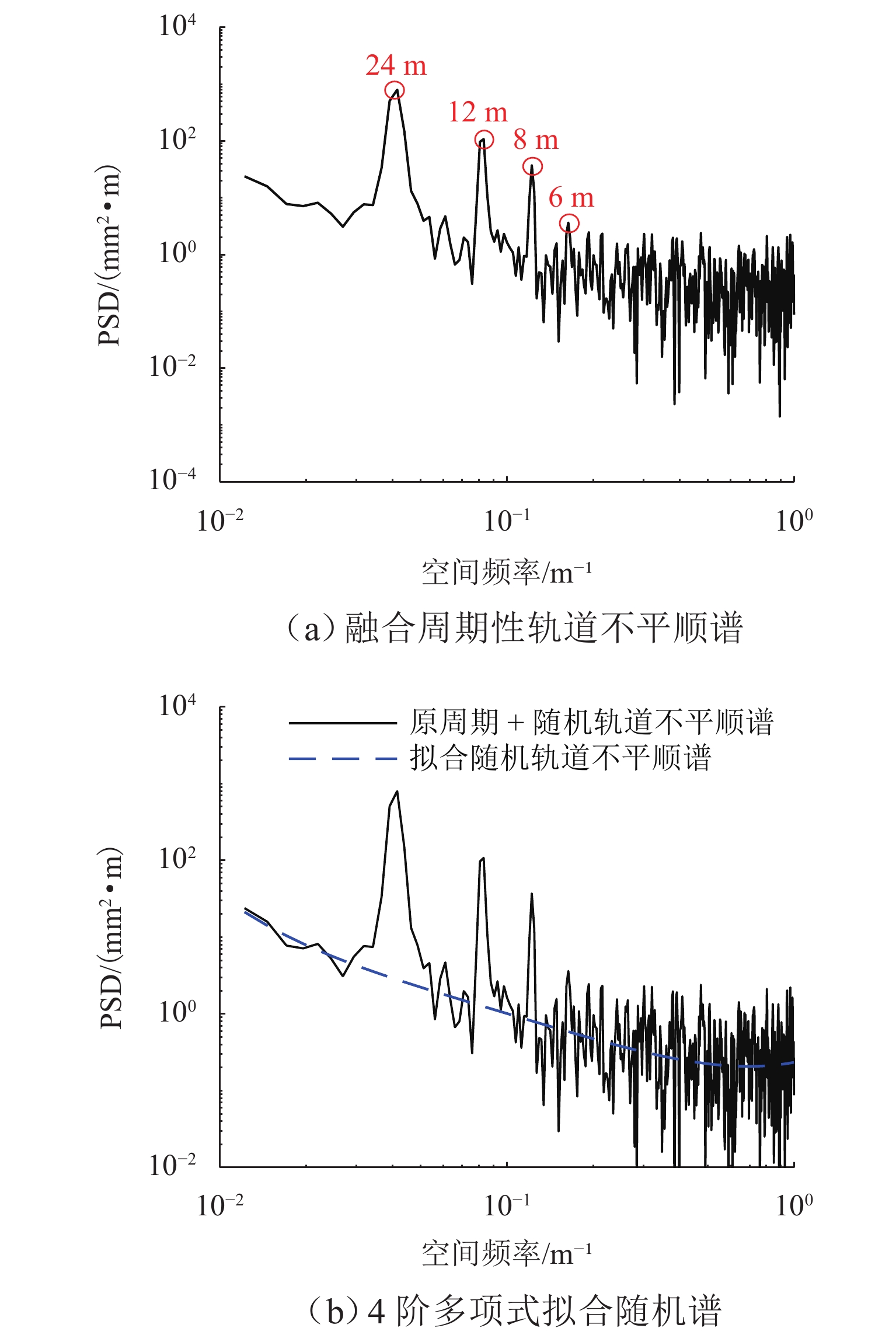
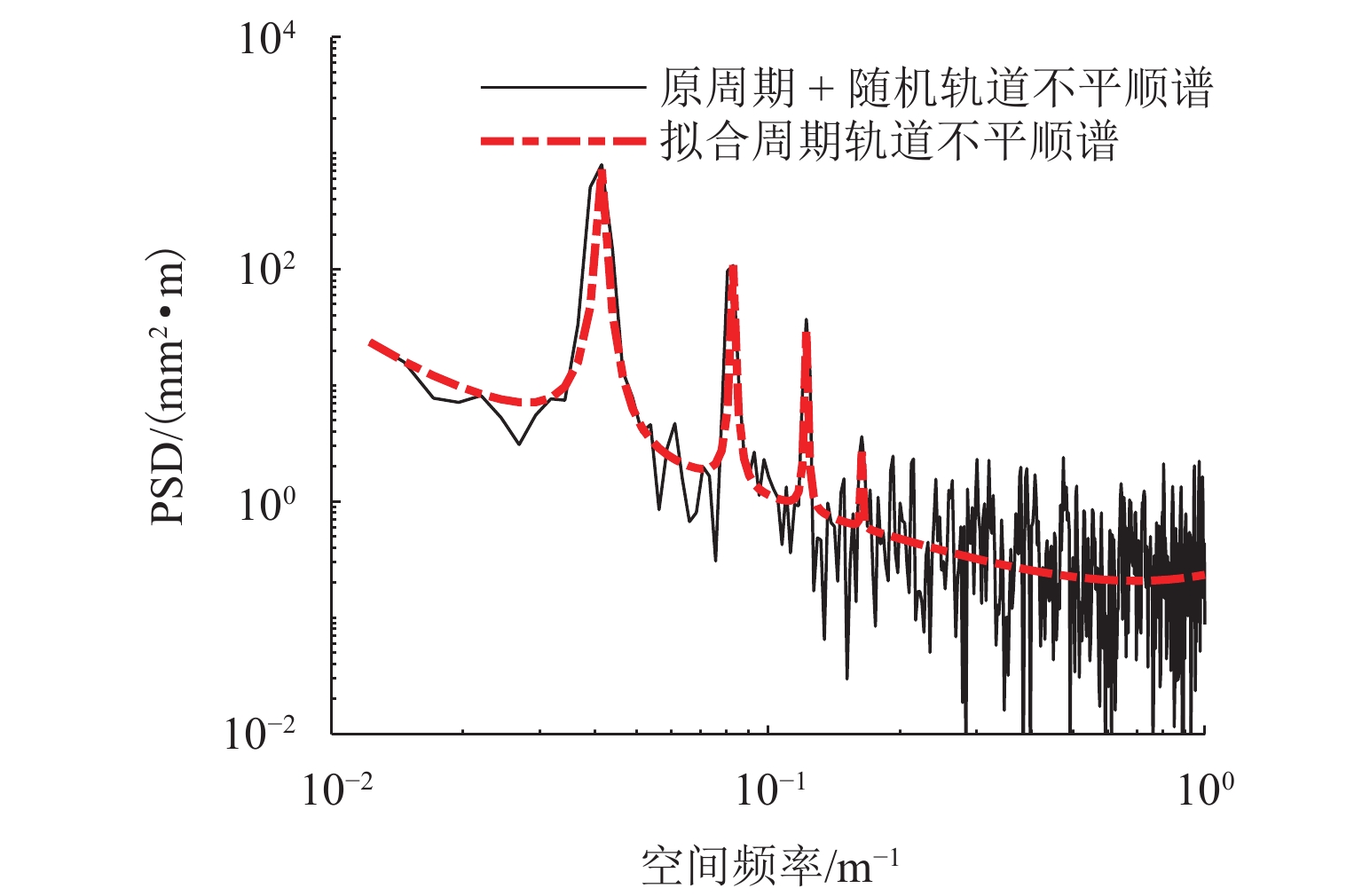
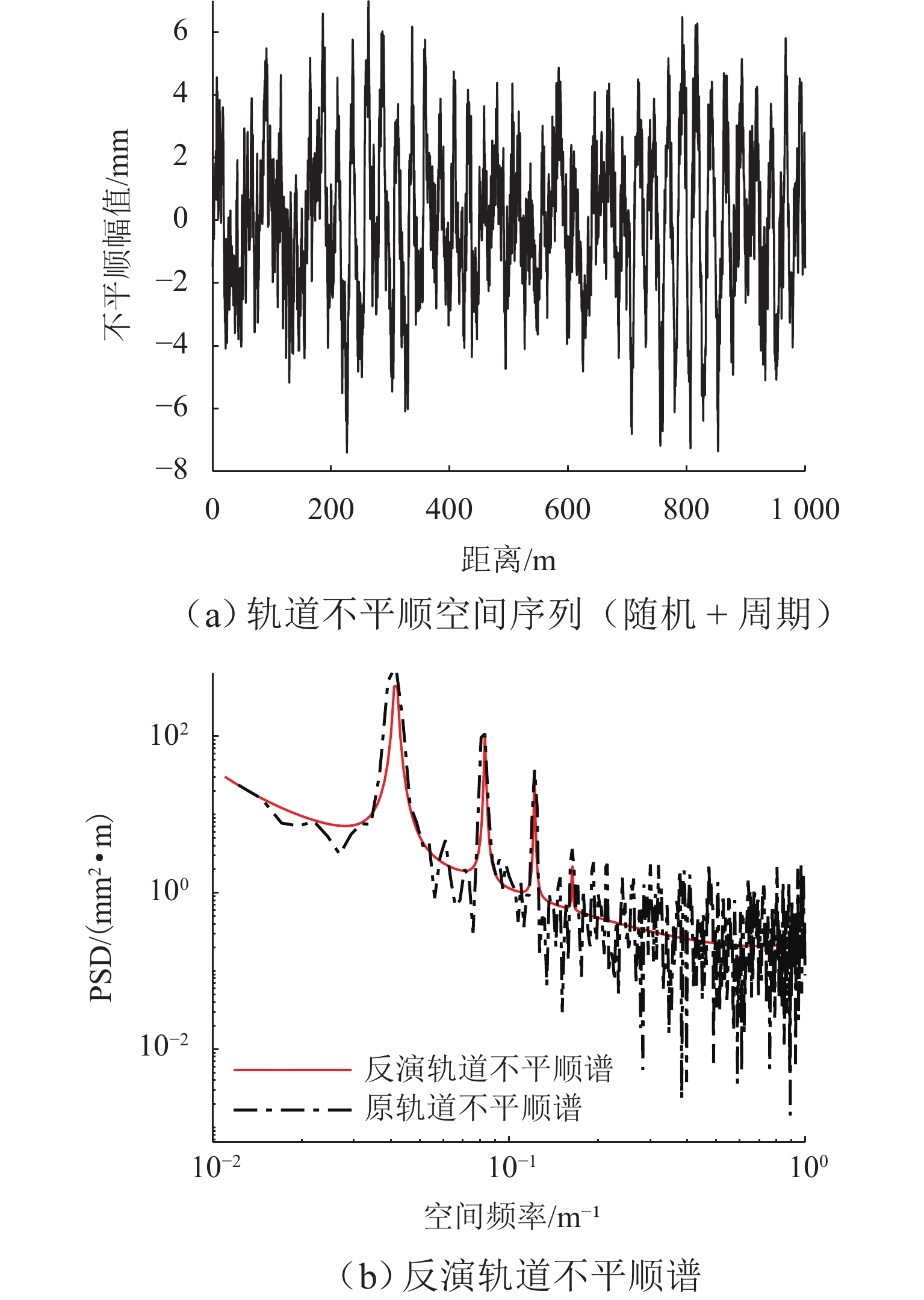
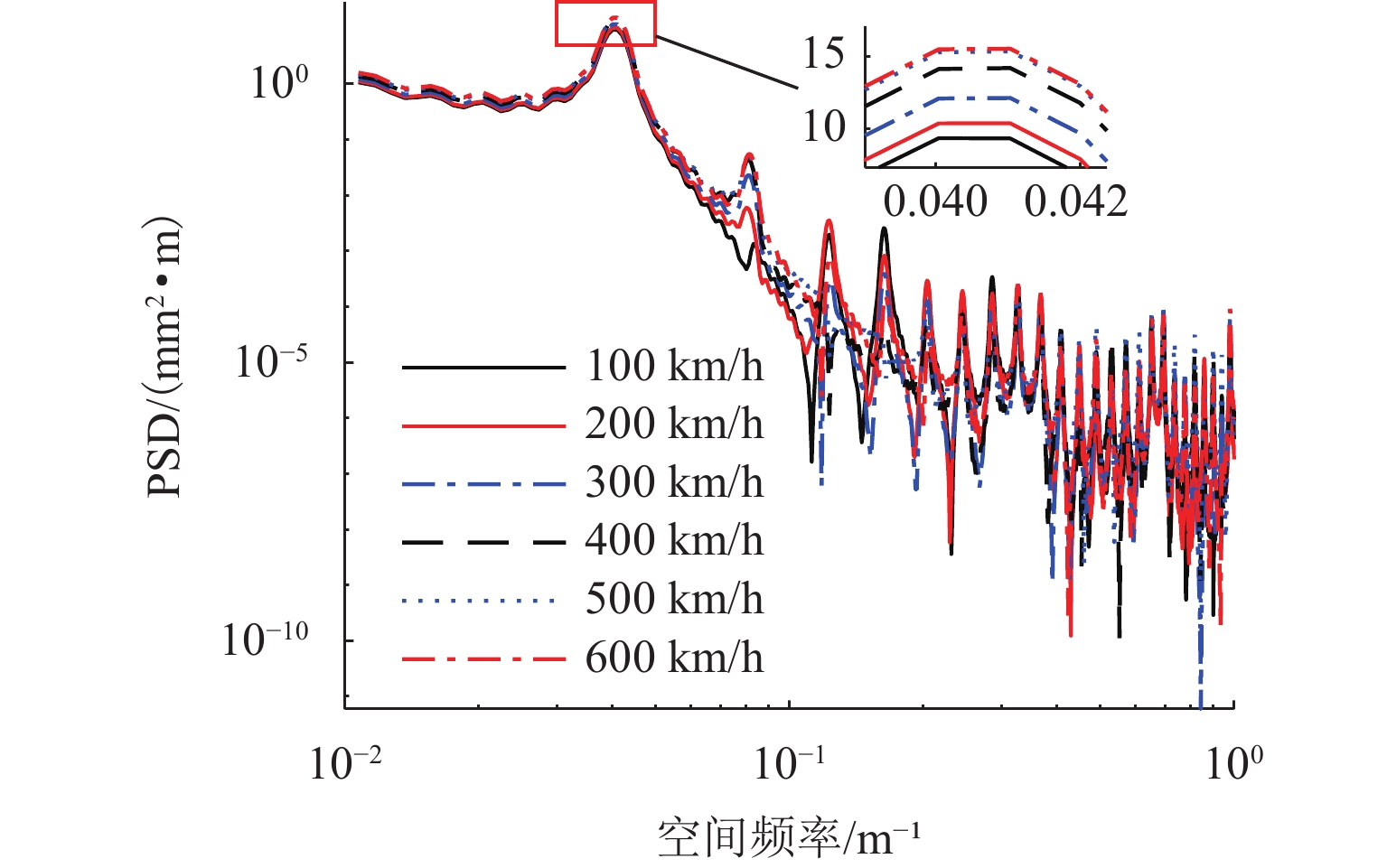
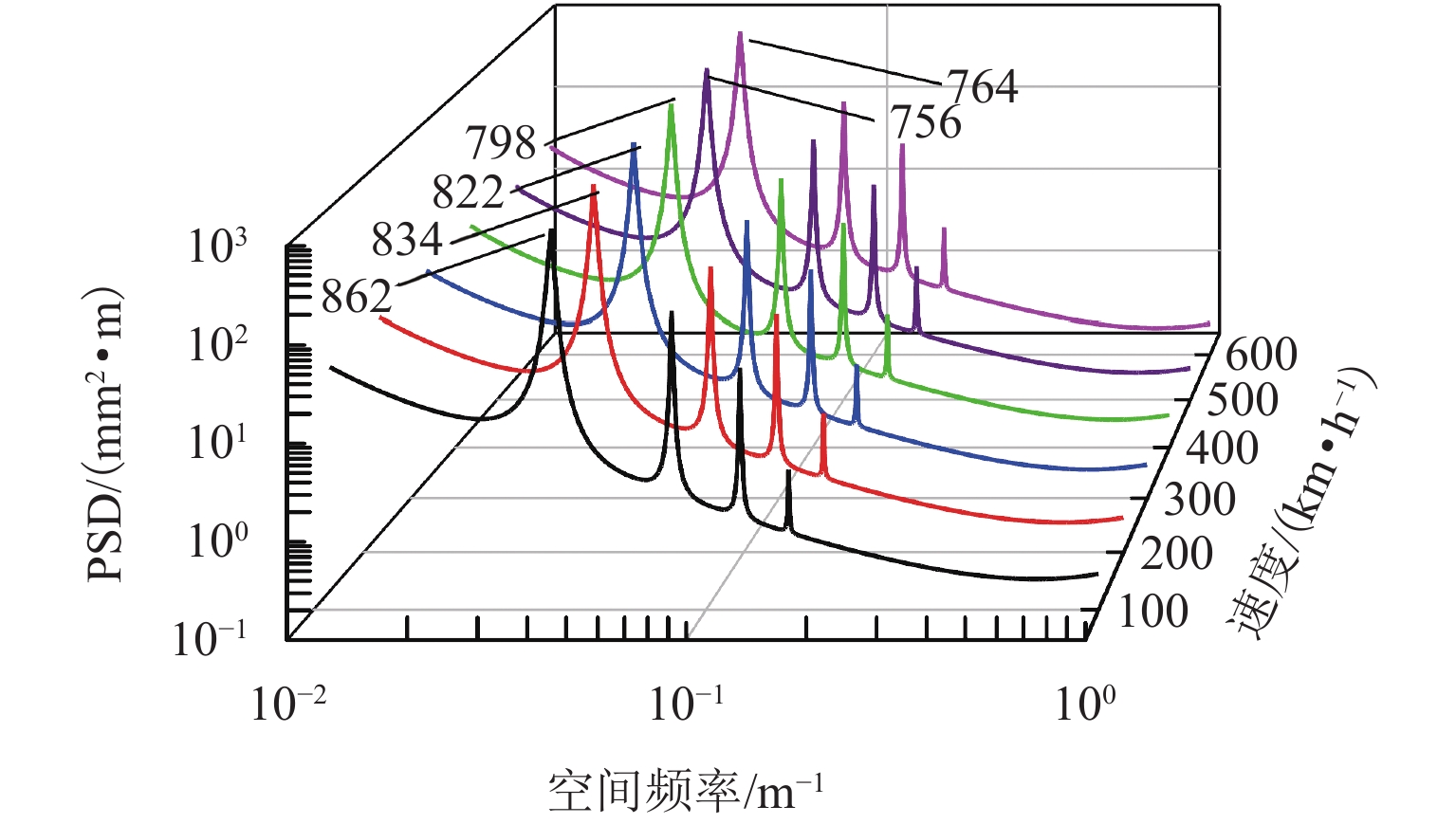
To provide a more realistic geometric irregularity spectrum for high-temperature superconducting (HTS) pinning-type maglev systems, the irregularity spectrum of permanent magnet (PM) guideways considering structural periodicity was investigated. To achieve the characterization and inversion of the PM guideway irregularity spectrum that incorporates structural periodicity, a finite element model of an HTS maglev bridge and its PM guideway was first built. Moving loads from a maglev train were then applied to the model to identify the most unfavorable loading position, and the displacement at this point was extracted as the dynamic irregularity. Next, by considering the deformation of the PM guideway caused by bridge creep camber and superimposing the periodic dynamic irregularity results from train loads, a sample of periodic guideway irregularity was formed. Furthermore, random assembly errors of the PM guideway were modeled using a white noise filtering method to obtain a sample of random geometric irregularity. This was then superimposed with the periodic irregularity to form the overall PM guideway irregularity spectrum. The irregularity spectrum was fitted using a 4th-order polynomial and a Lorentzian function, and the fitted spectrum was inversely transformed via the inverse Fourier transform to verify the effectiveness of the fitting method. Finally, the influence of train speed on the fitted irregularity spectrum was analyzed. The results show that train speed mainly affects the PM guideway irregularity spectrum in the wavelength range of 3–100 m; when the speed approaches the critical resonance speed of the bridge, the amplitude of the inverse-transformed irregularity becomes significantly larger. The irregularity spectrum obtained in this study can be readily applied in the dynamics calculations of HTS maglev vehicles, serving as input for the dynamic analysis and design optimization of HTS maglev trains operating at various speed levels.
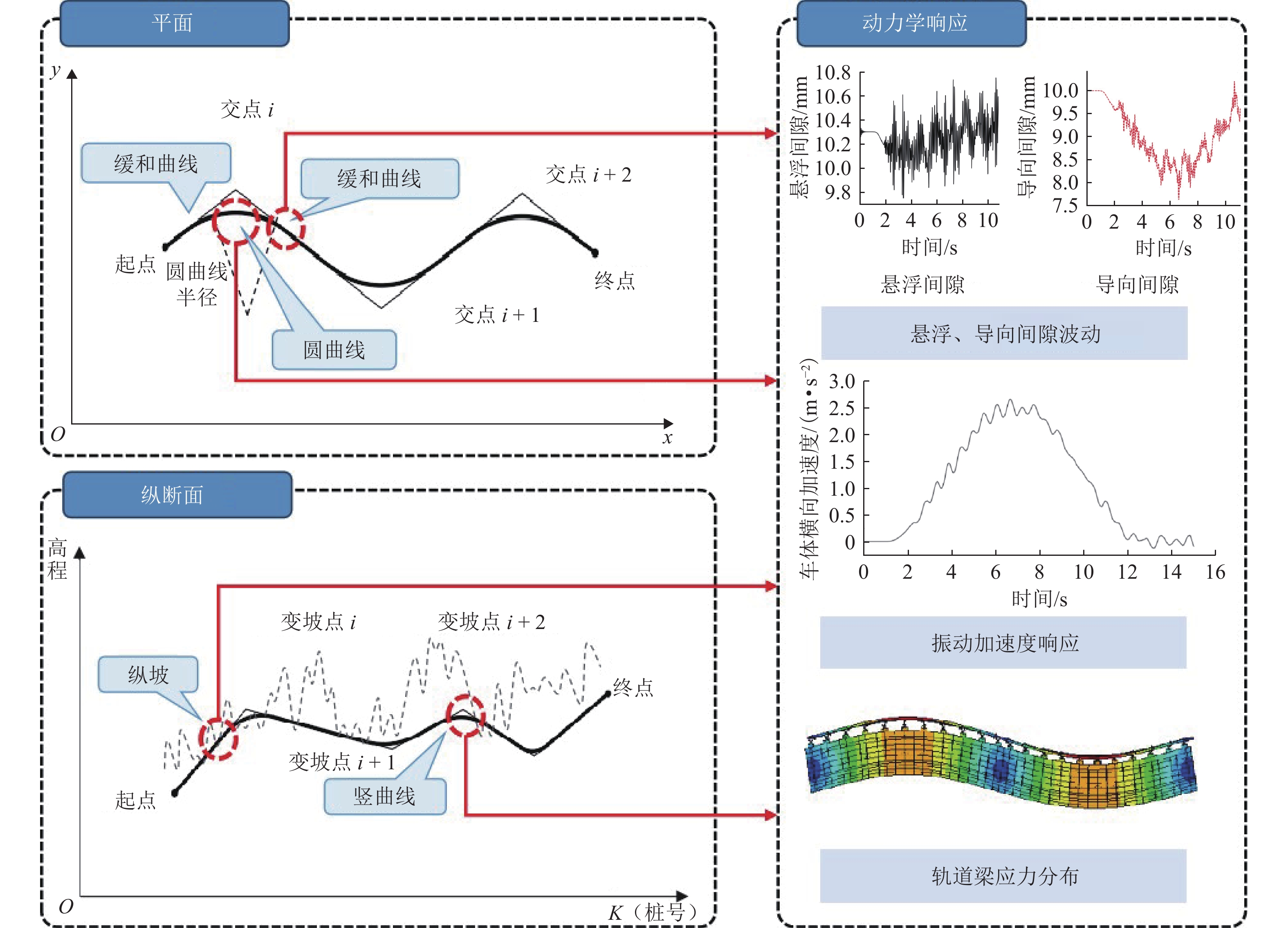
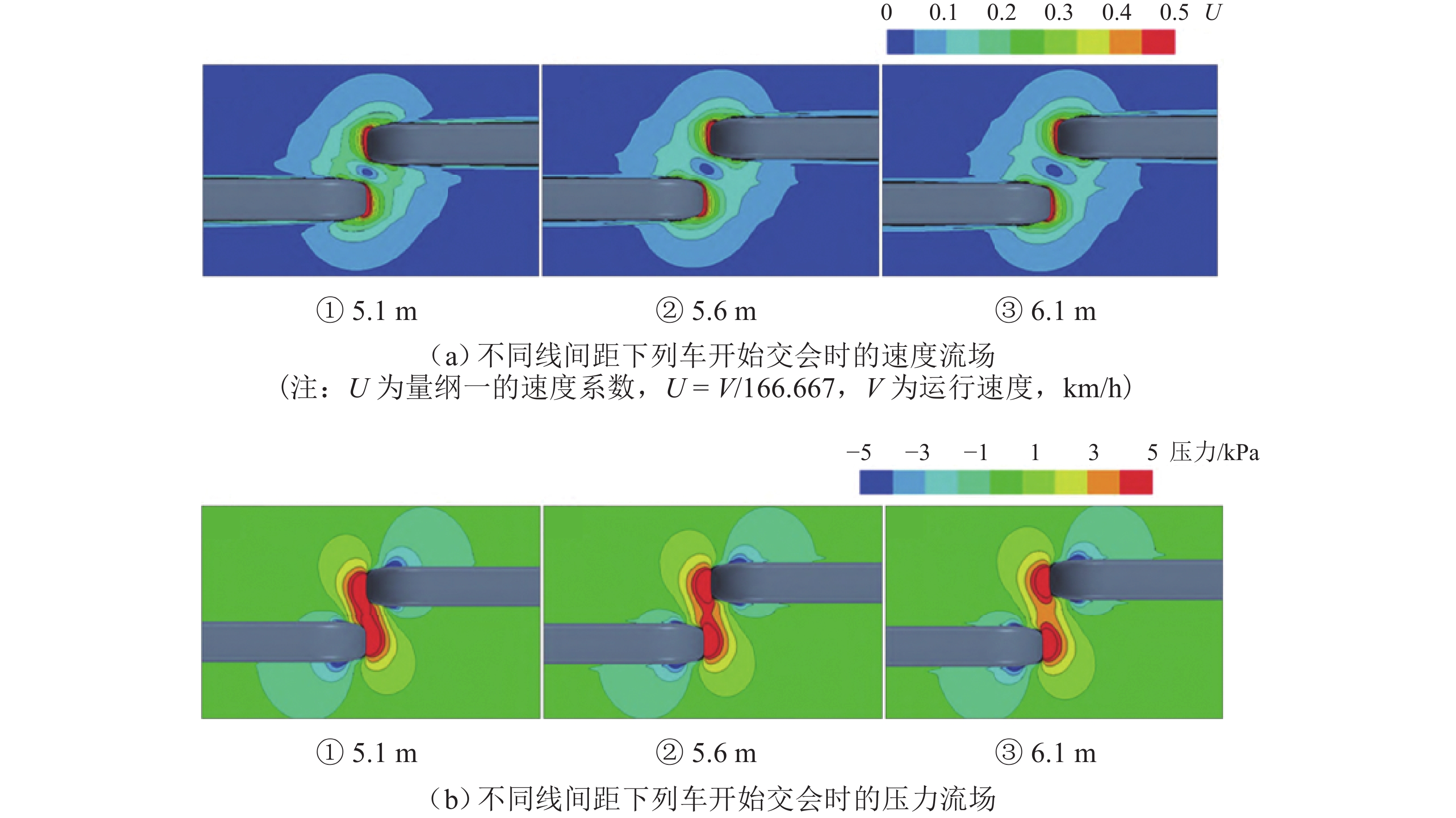
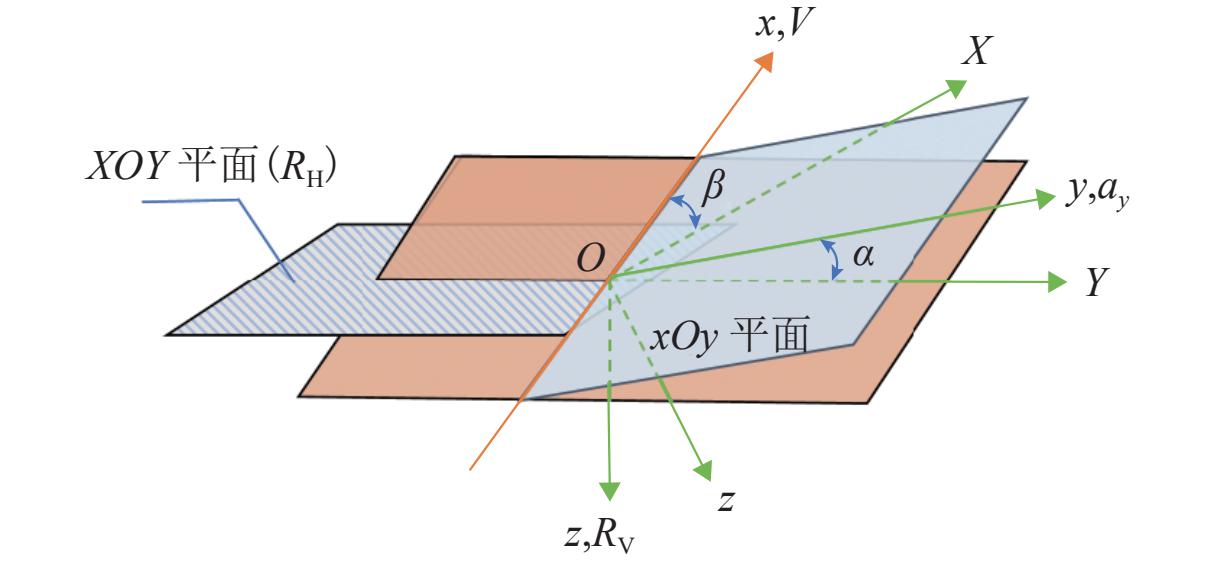
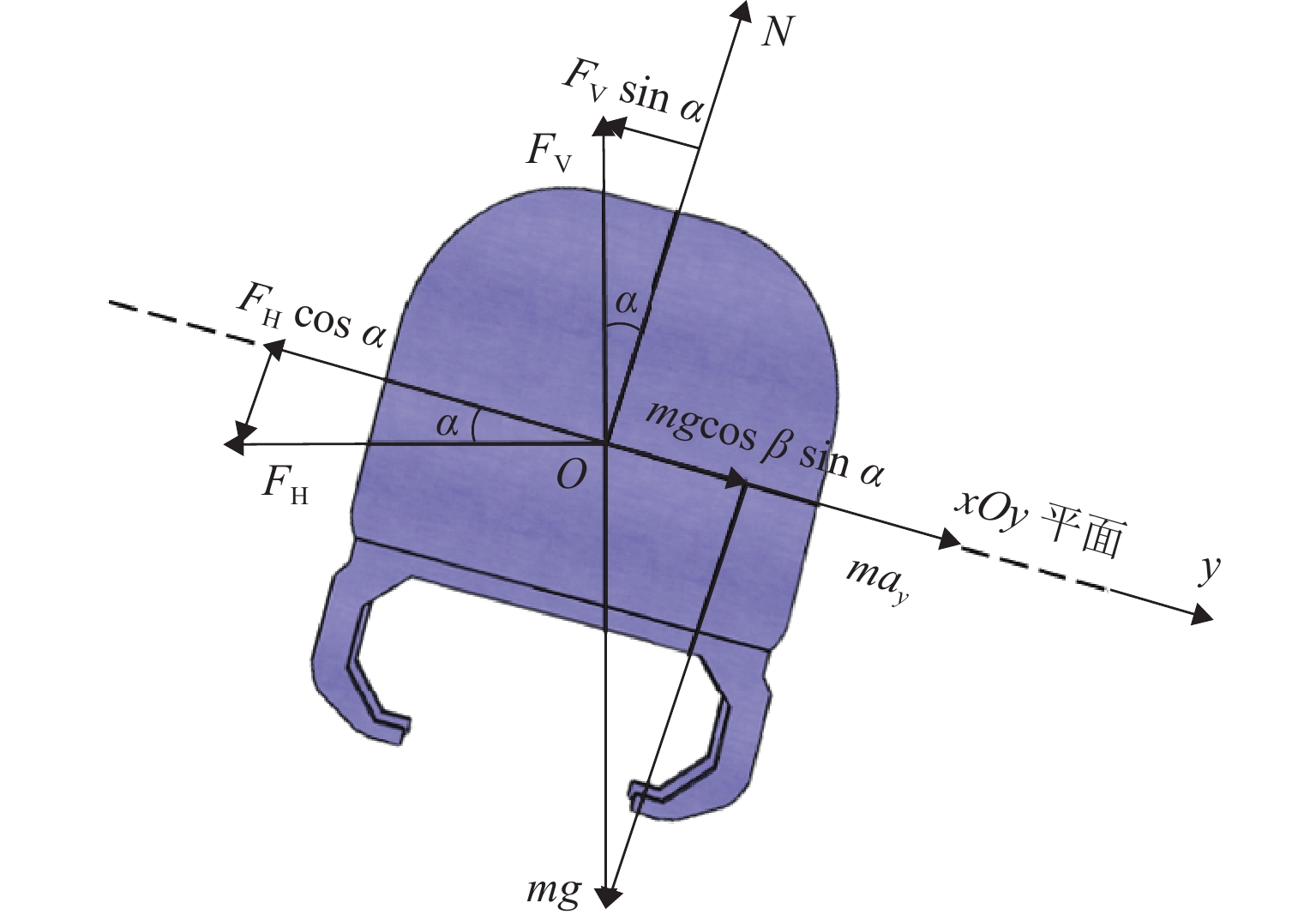
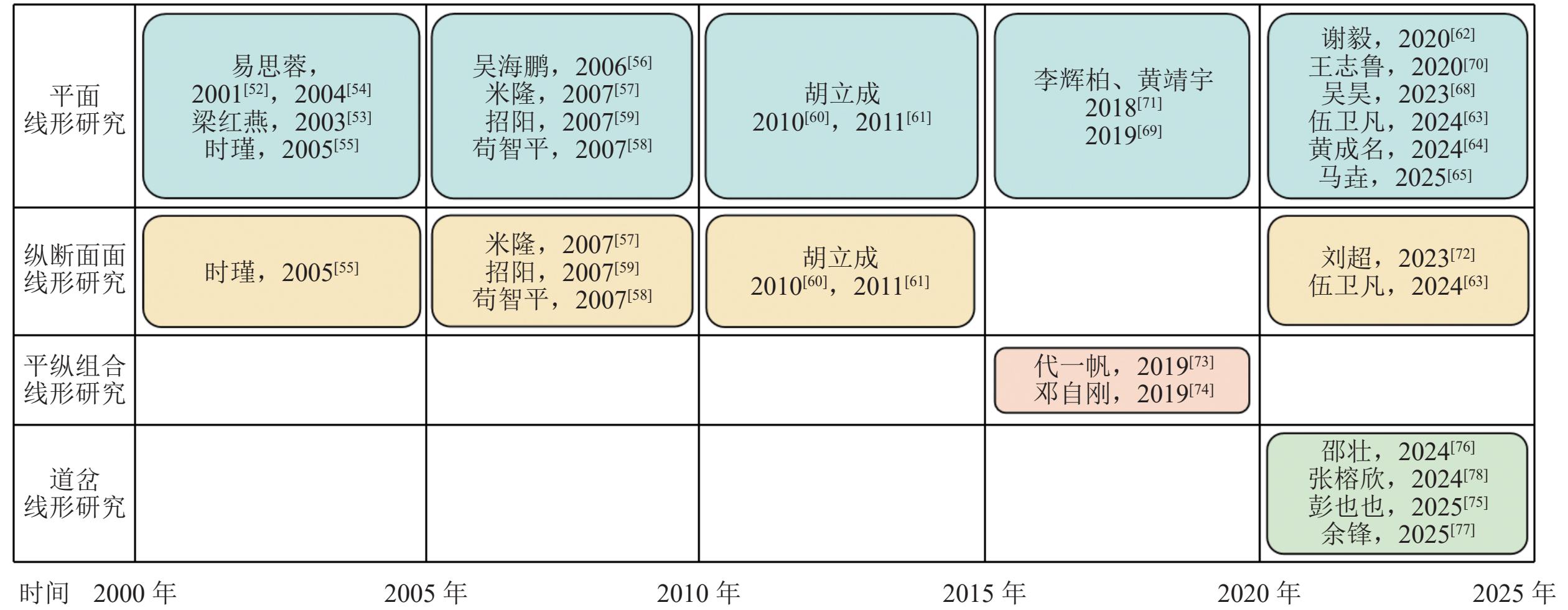
As a strategic direction for future high-speed land transportation, the spatial alignment design of high-speed maglev railways has a decisive impact on system performance and safety. The latest research advances in spatial alignment design of high-speed maglev railways were reviewed. First, the development history of high-speed maglev lines was summarized, including Japan’s maglev test lines, Germany’s Transrapid system, China’s high-speed maglev engineering practices (e.g., test lines at Jiading Campus of Tongji University, Qingdao Sifang Company, Shanghai Airport, and Jiuli Campus of Southwest Jiaotong University), as well as ongoing and planned lines. Subsequently, the influence of spatial alignment of high-speed maglev railways on train stability was analyzed from three perspectives: the coupling effects of spatial alignment on levitation and guidance, the dynamic response mechanisms governed by alignment parameters, and the aerodynamic constraints on alignment configurations. Furthermore, the definition and composition of spatial alignment design were systematically elaborated, covering calculation and selection criteria for horizontal and vertical alignment parameters, combined horizontal and vertical alignment optimization, and turnout alignment studies. Current research bottlenecks were identified, such as inefficiencies in multi-physics coupling modeling and simulation efficiency, insufficient correlation between alignment parameter standards and dynamic performance, limitations in test line design theories and scenario coverage, challenges in global optimization and safety threshold quantification, low intelligence in alignment selection, difficulties in coordinating complex coupling constraints, immature multi-objective optimization methods for alignment selection and design, and inadequate integration of environmental impact assessment with alignment design. Finally, five directions for in-depth studies were pointed out to advance the innovation and refinement of spatial alignment design theories for high-speed maglev railways.







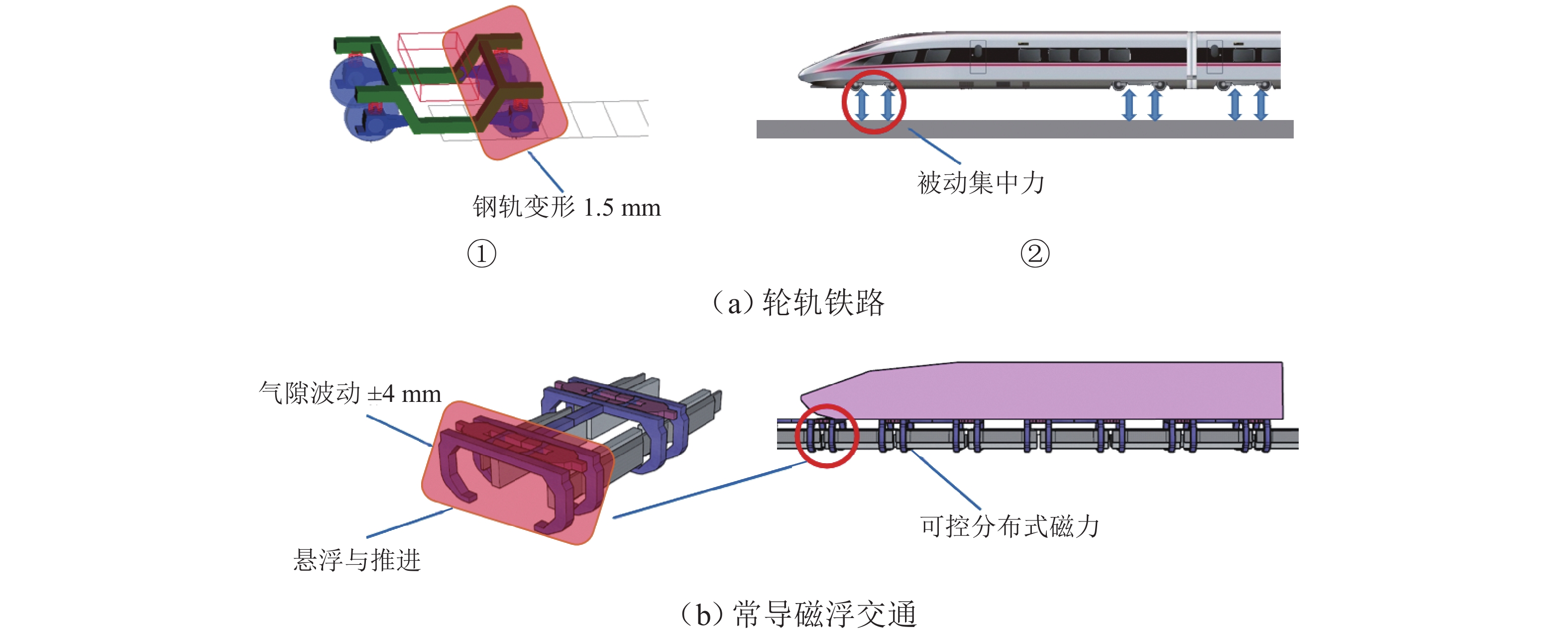
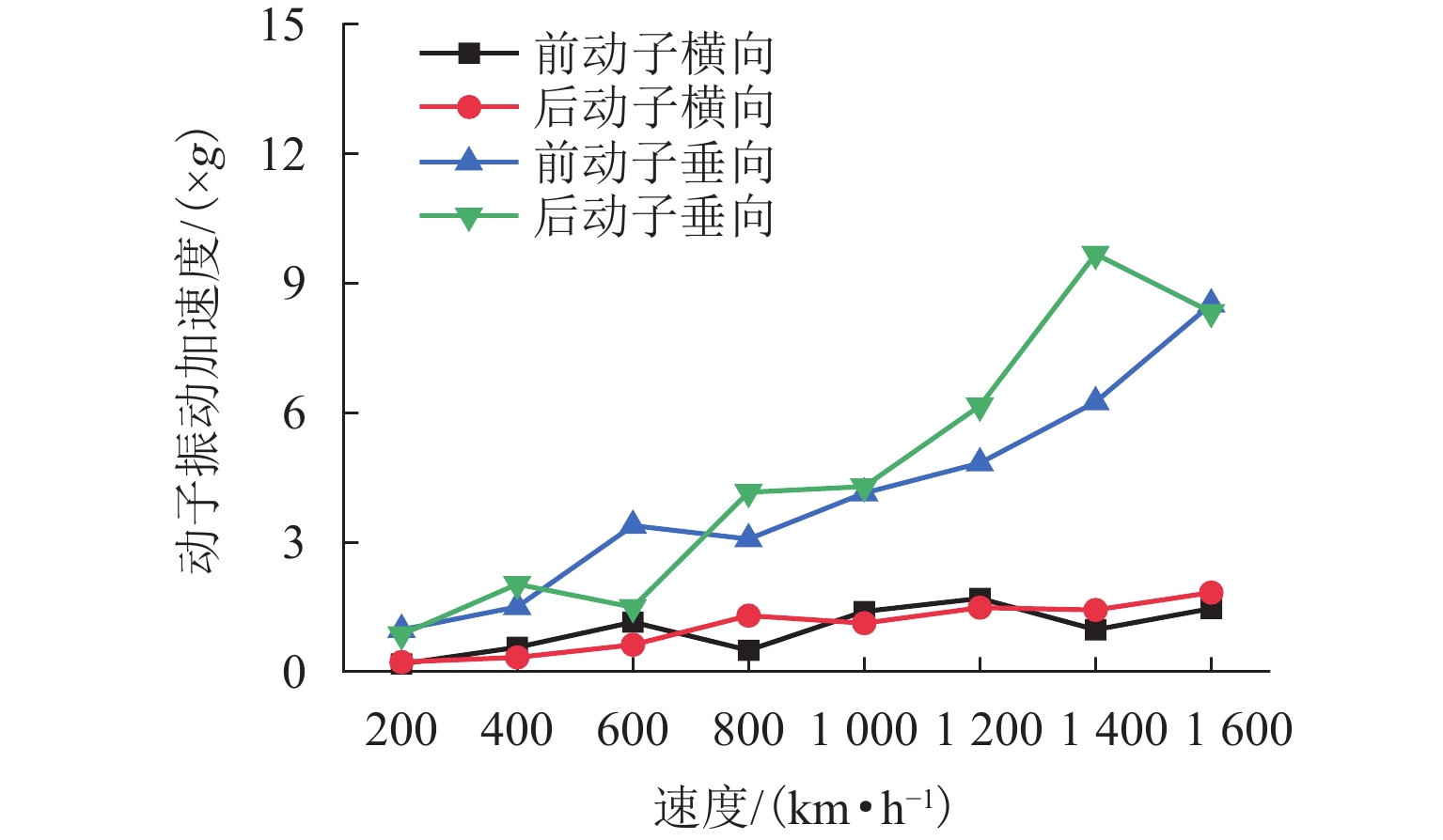
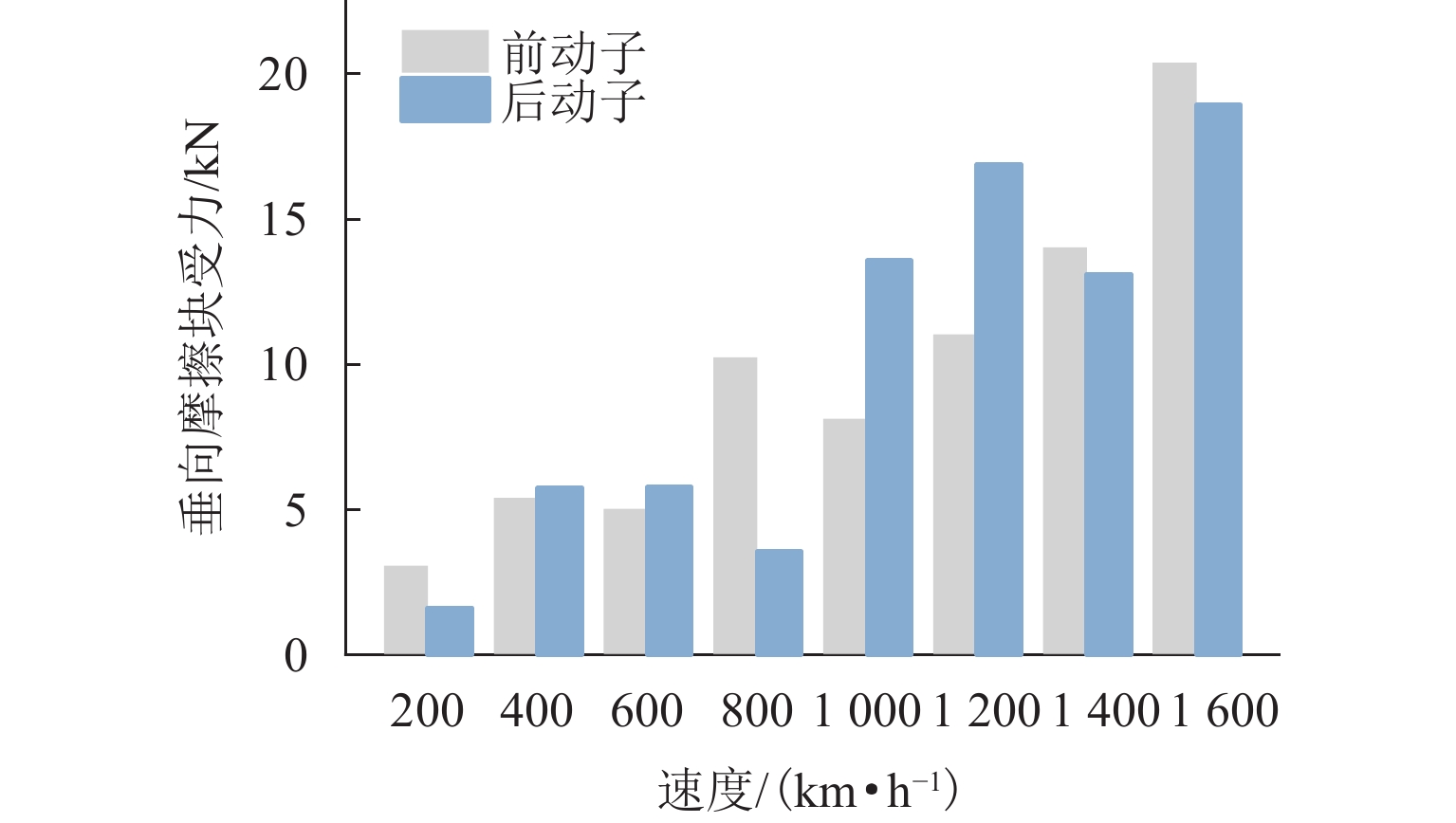
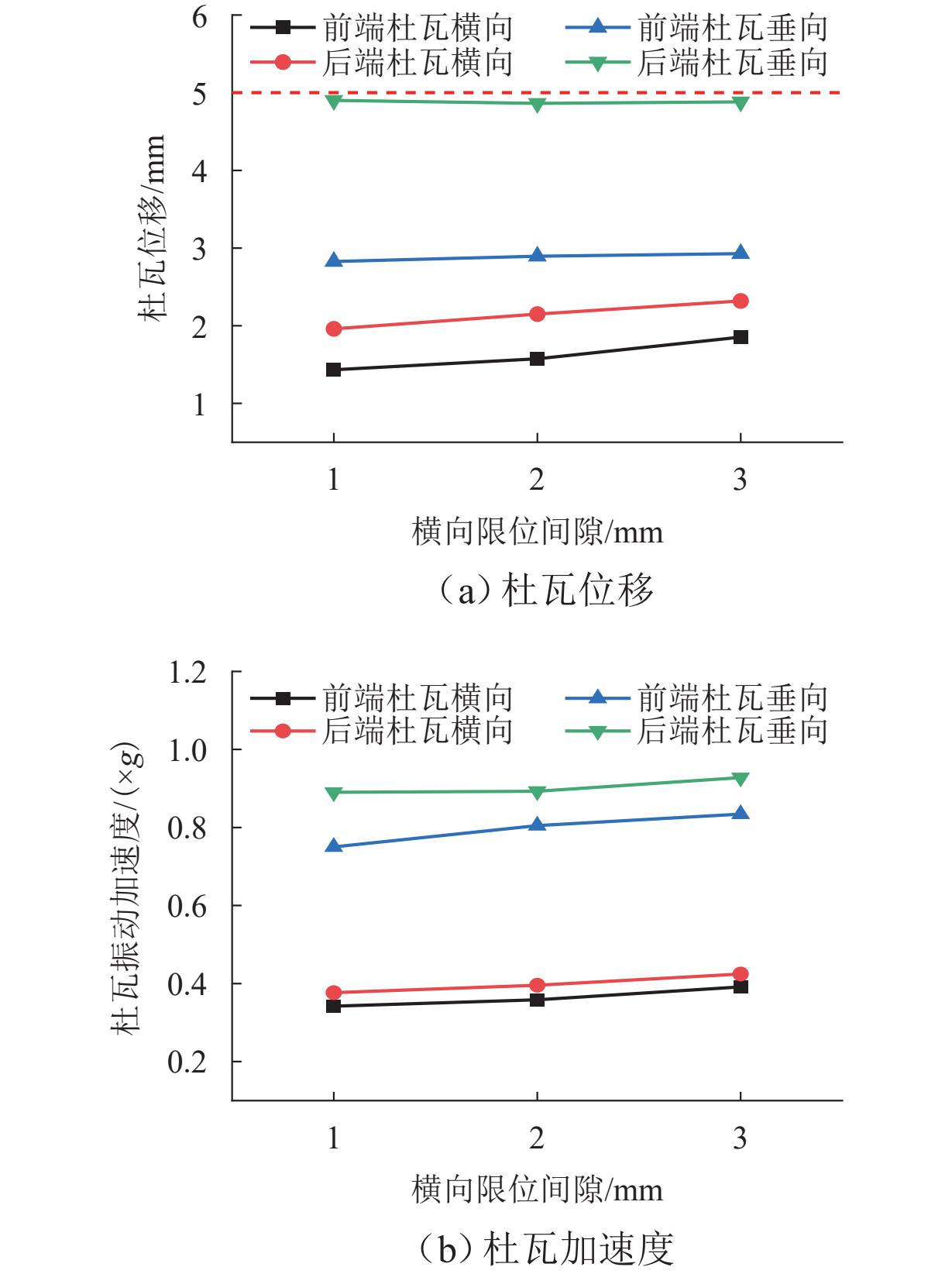
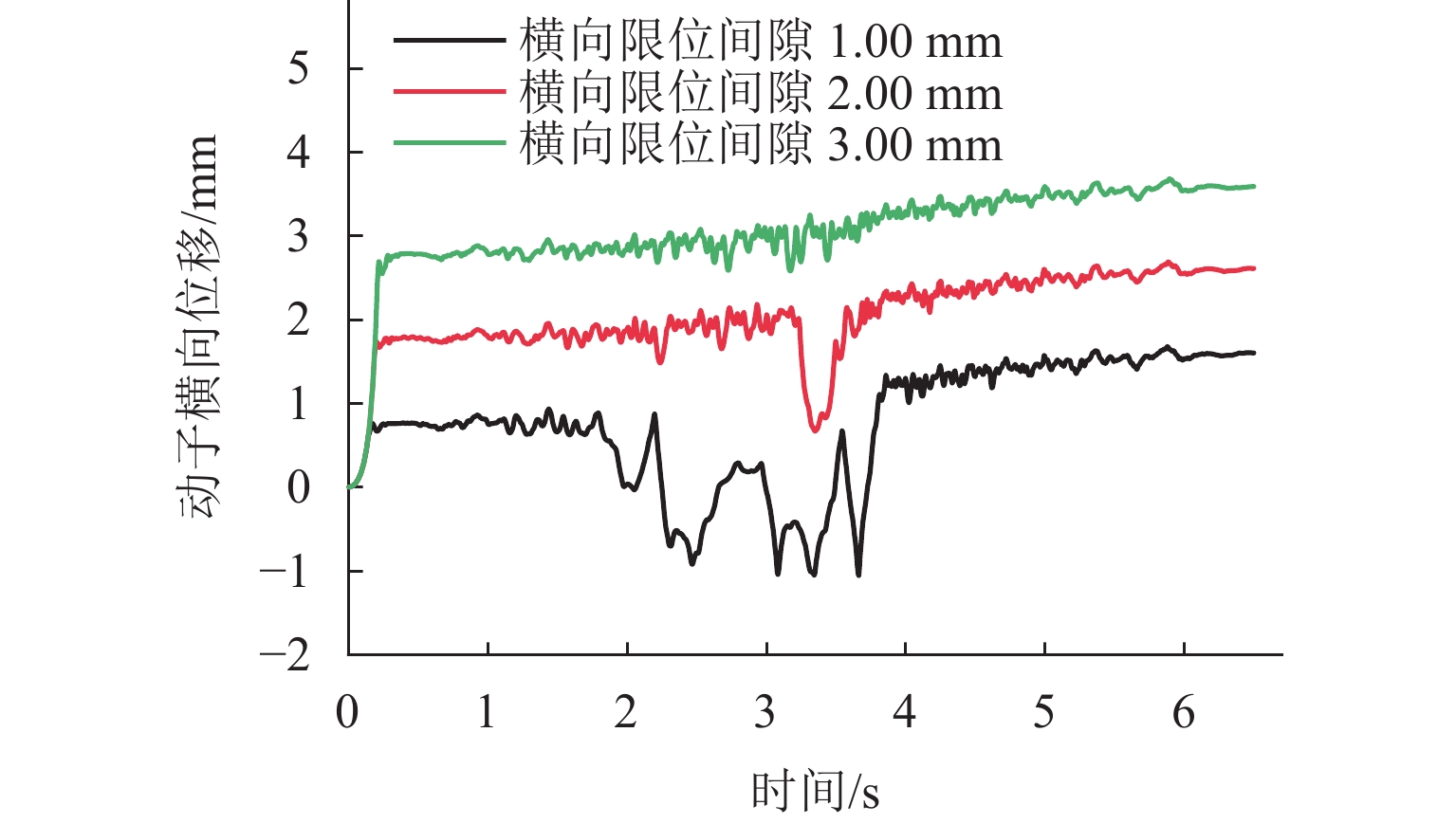
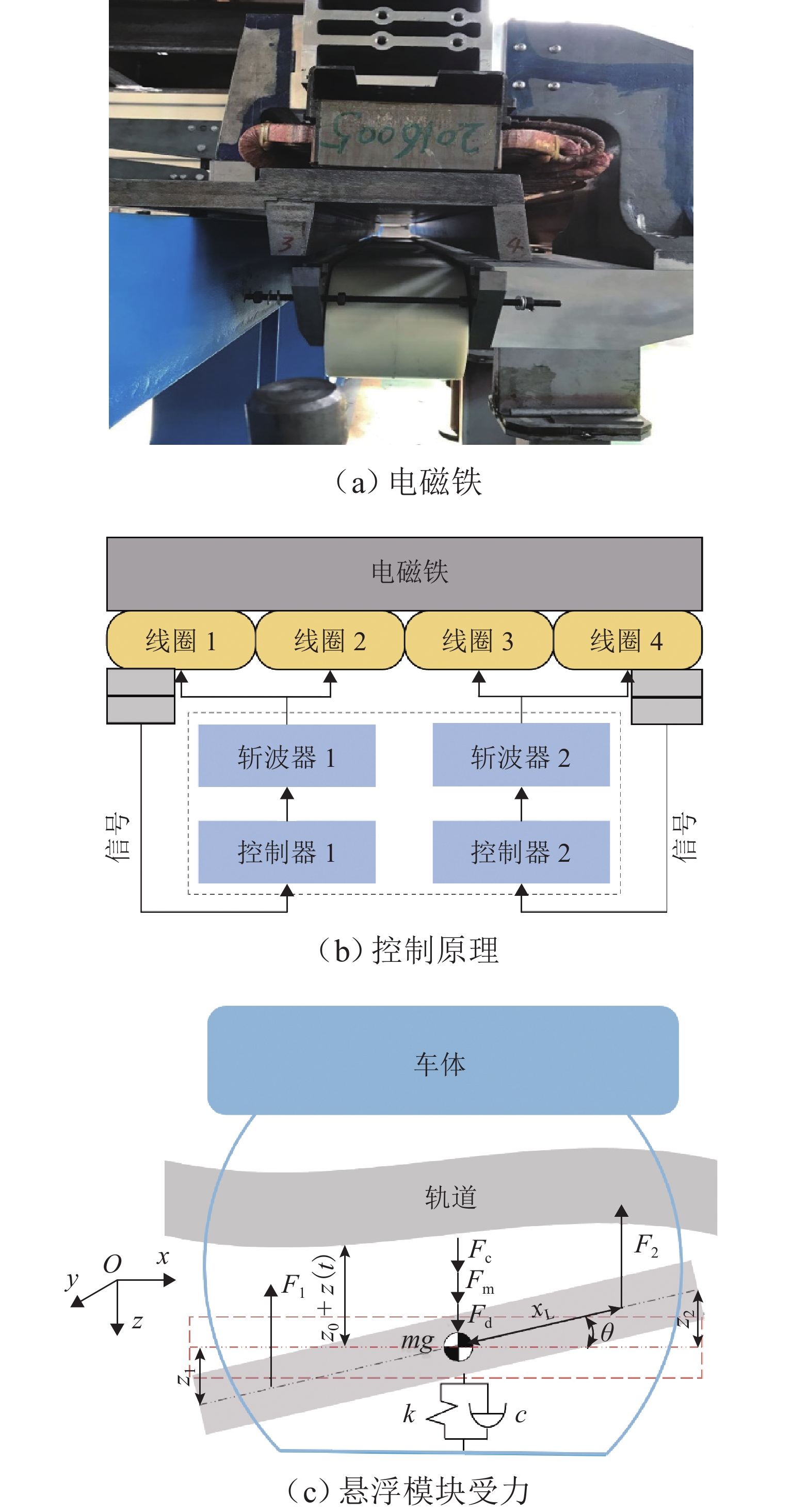
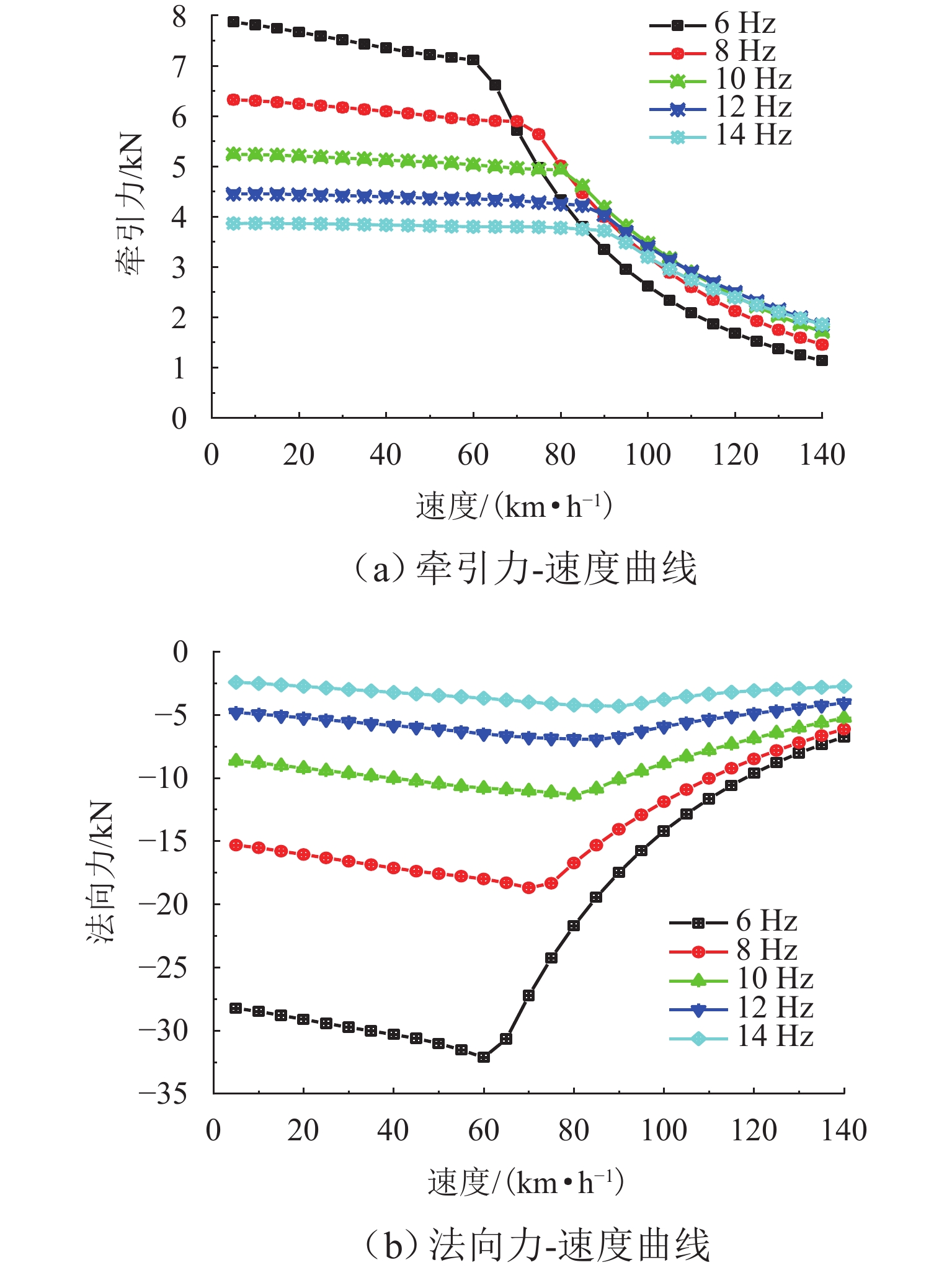
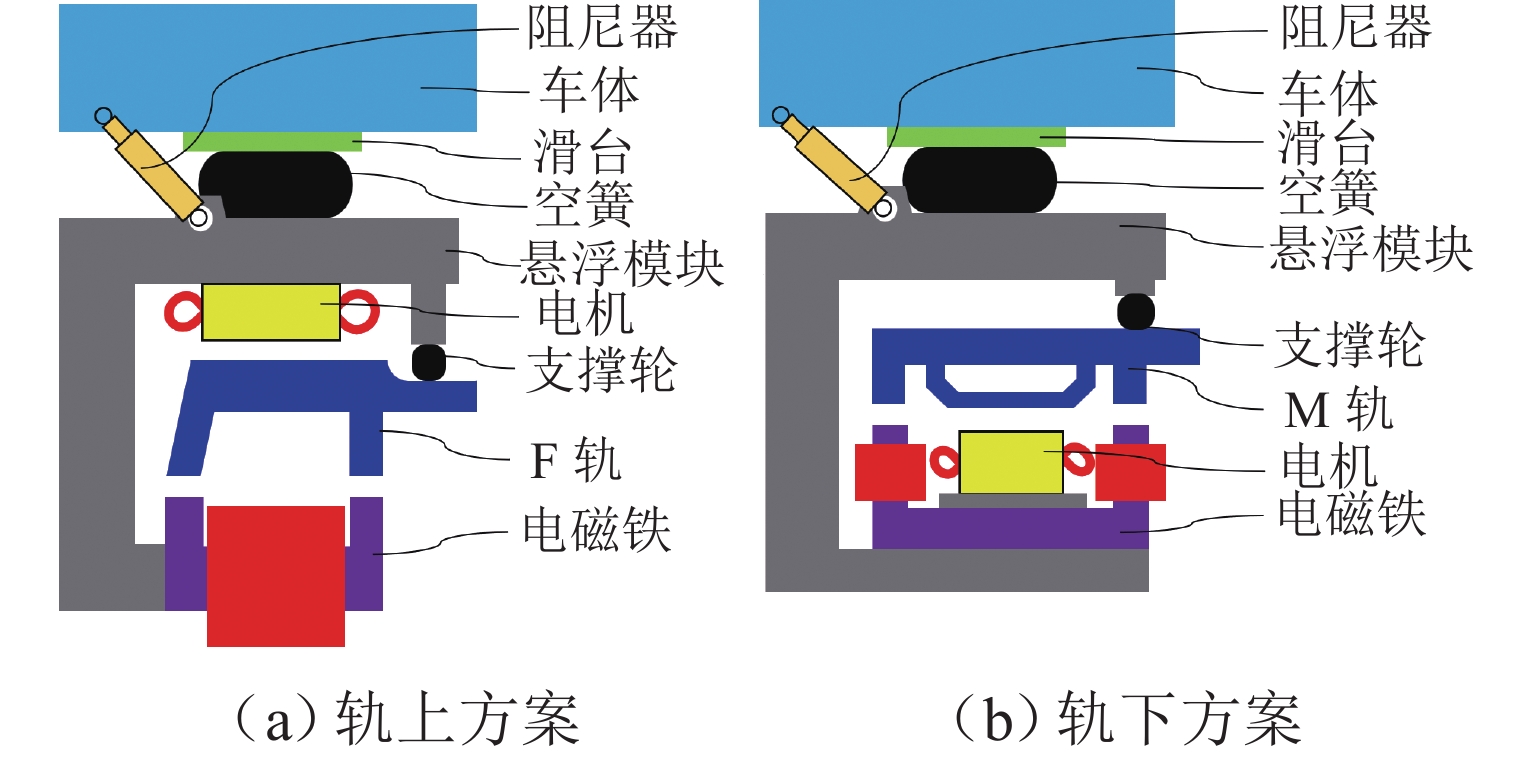
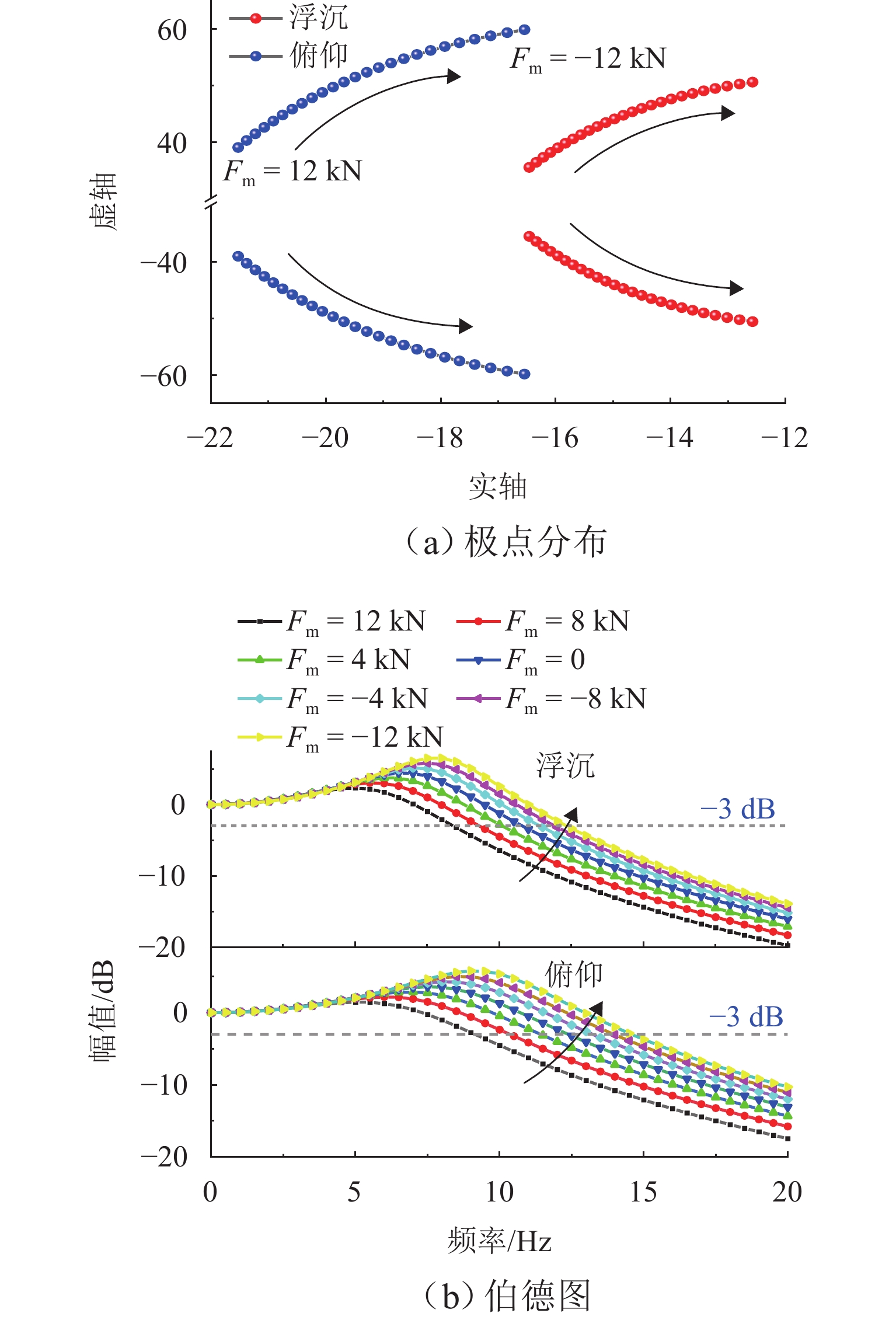
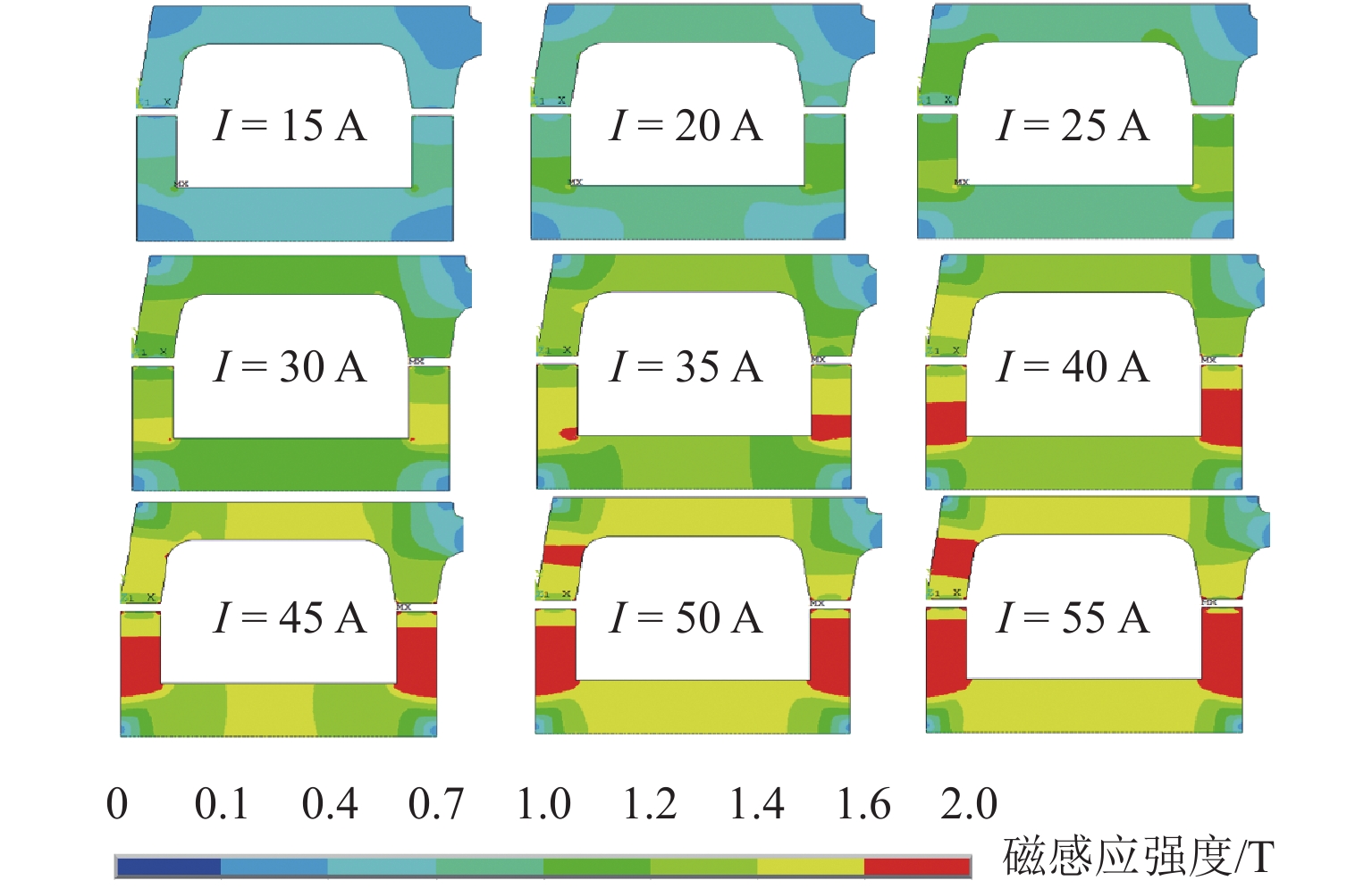
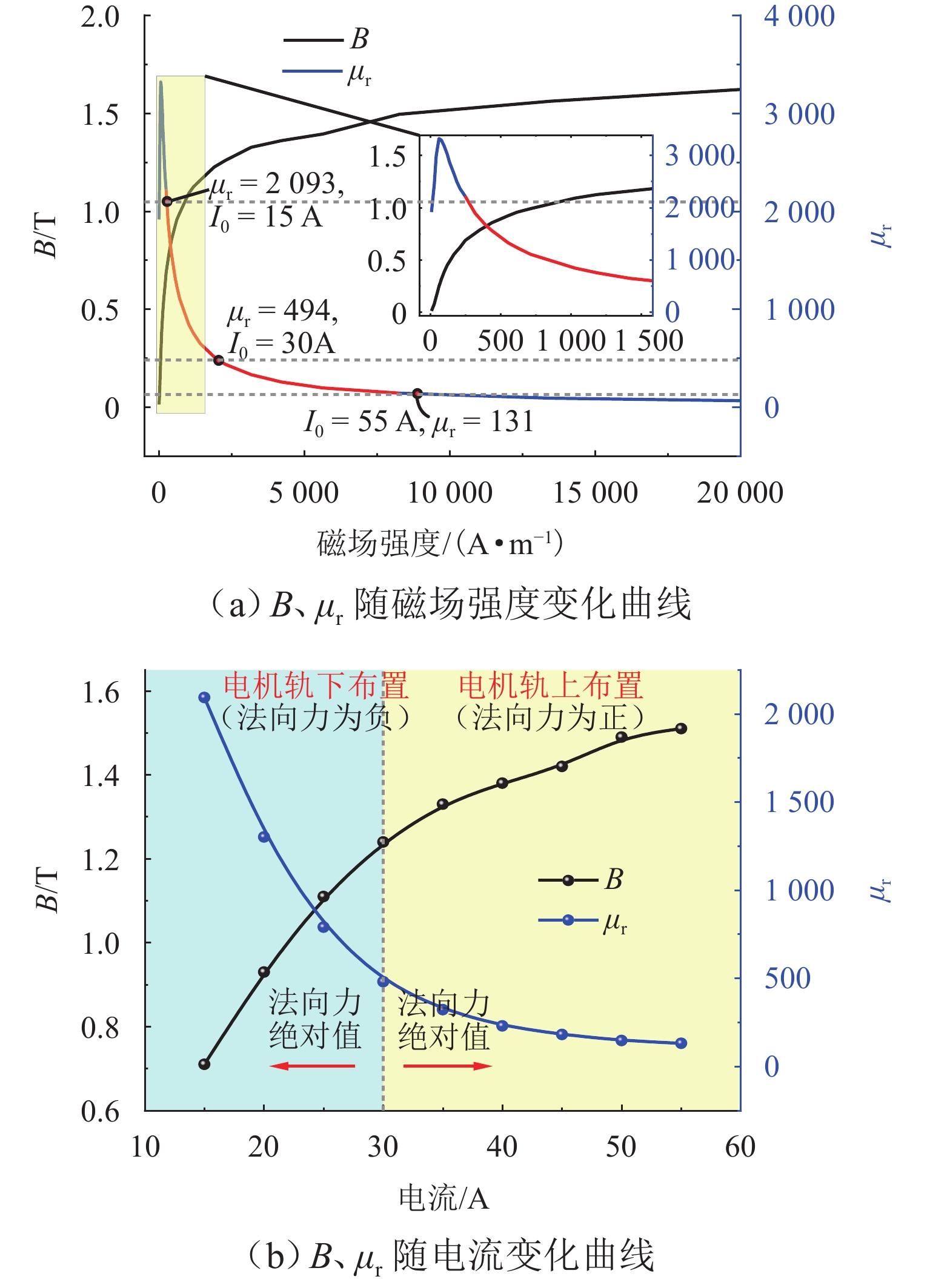
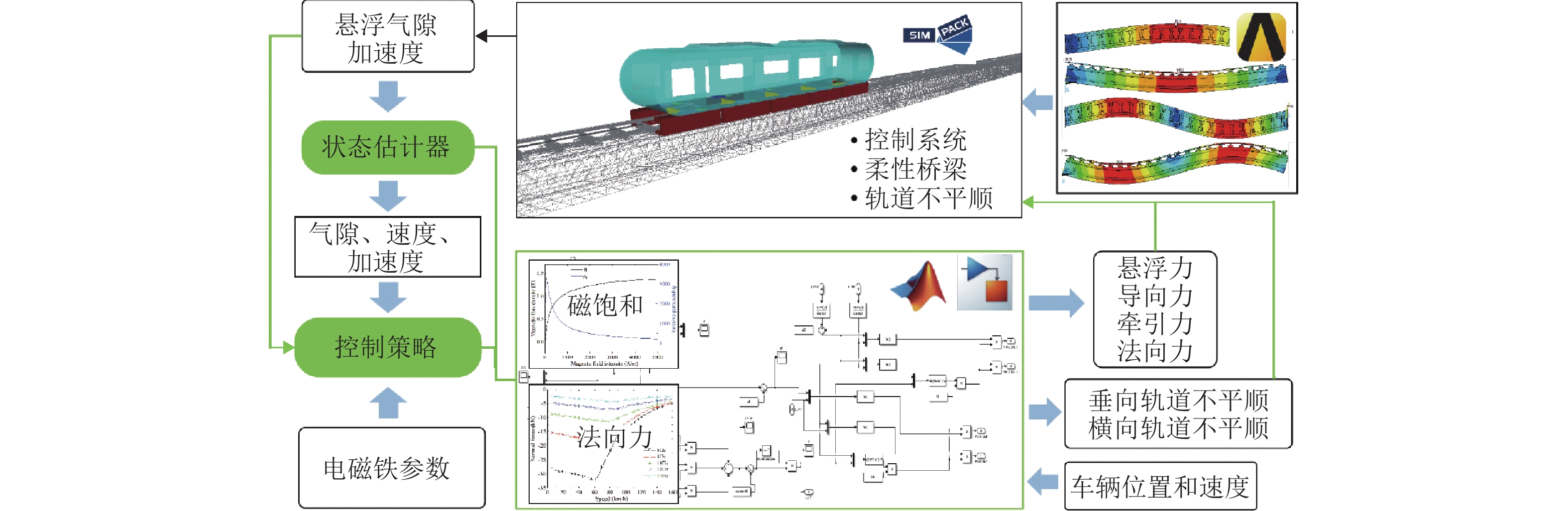
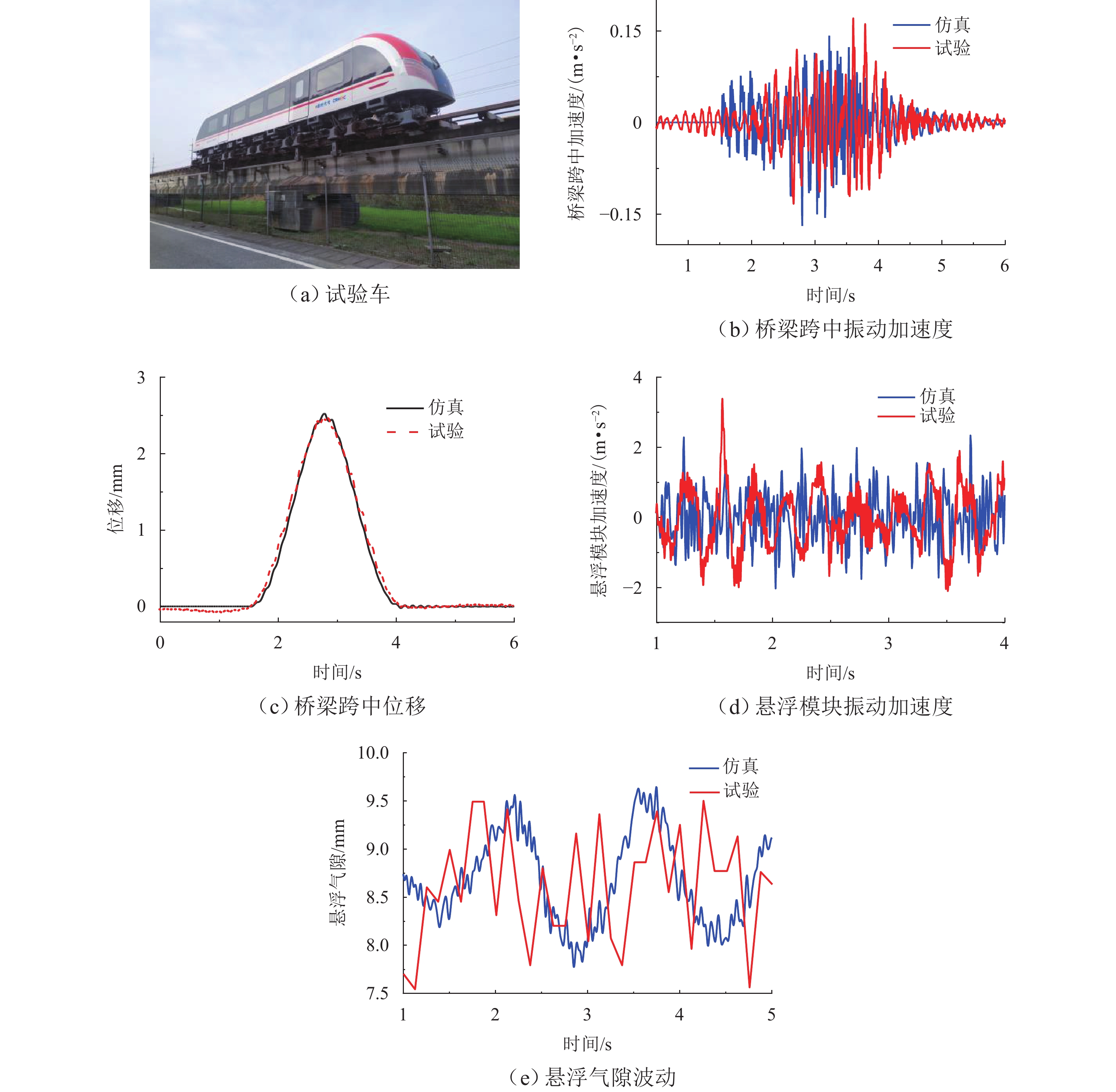
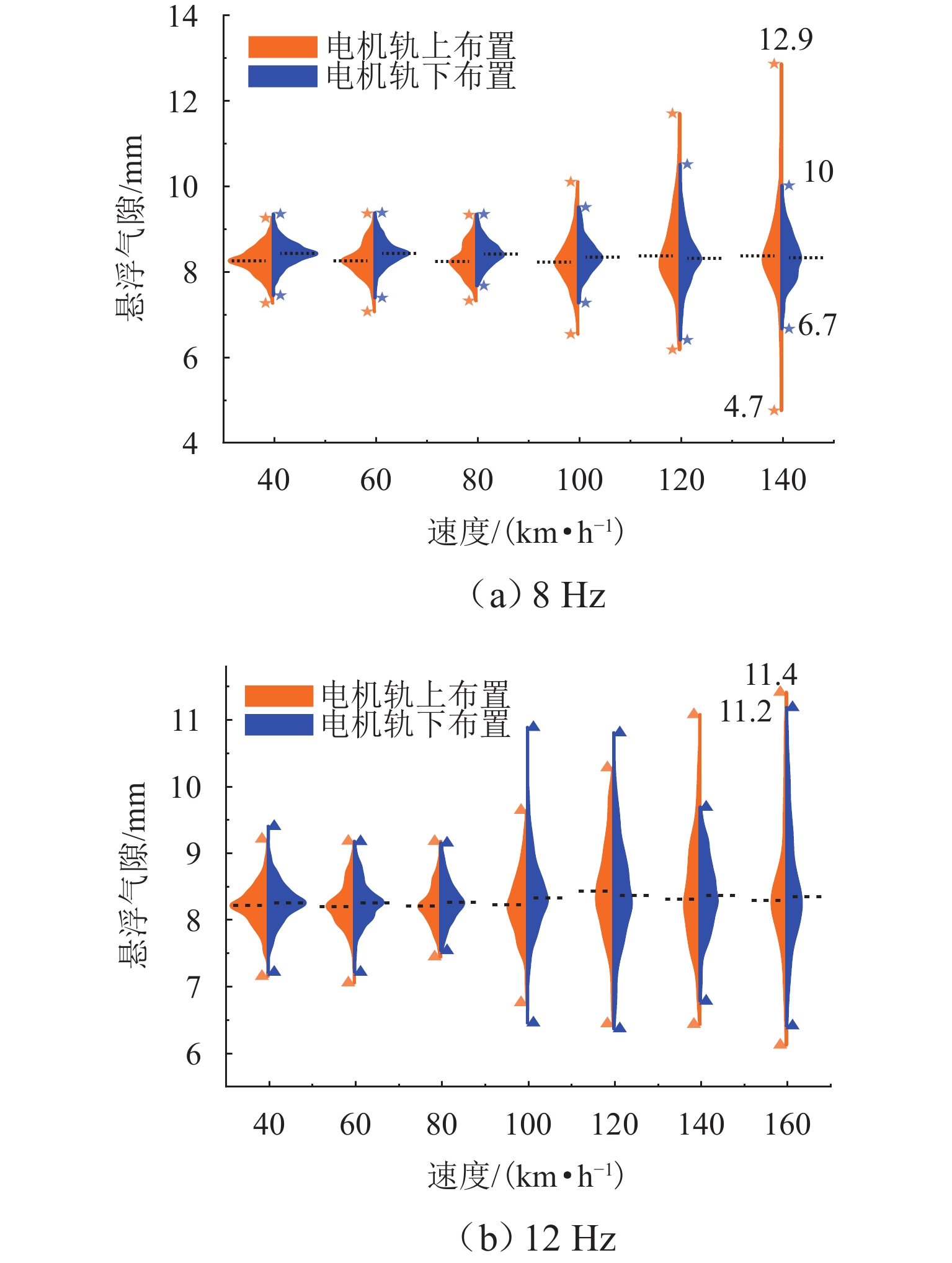
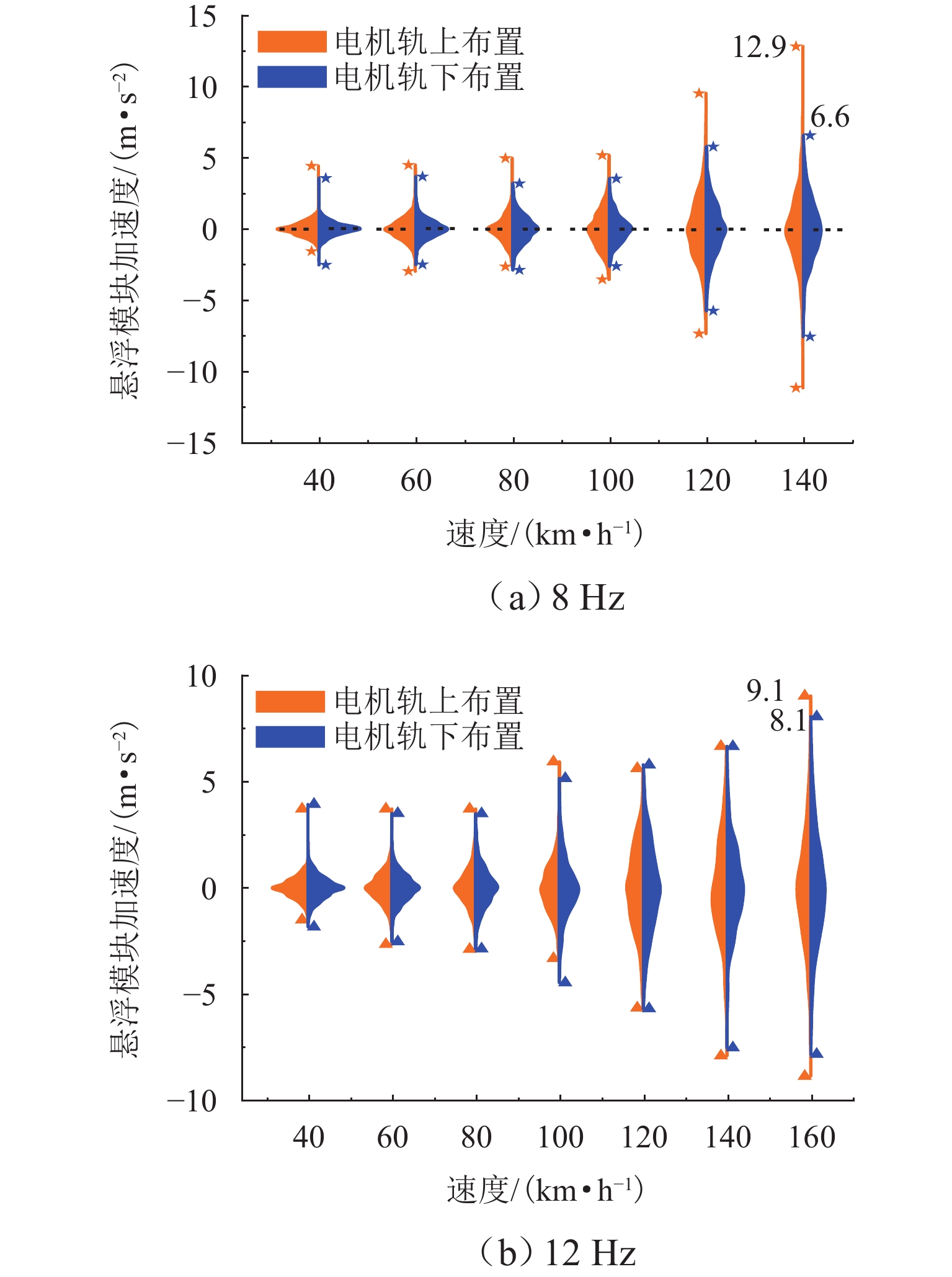
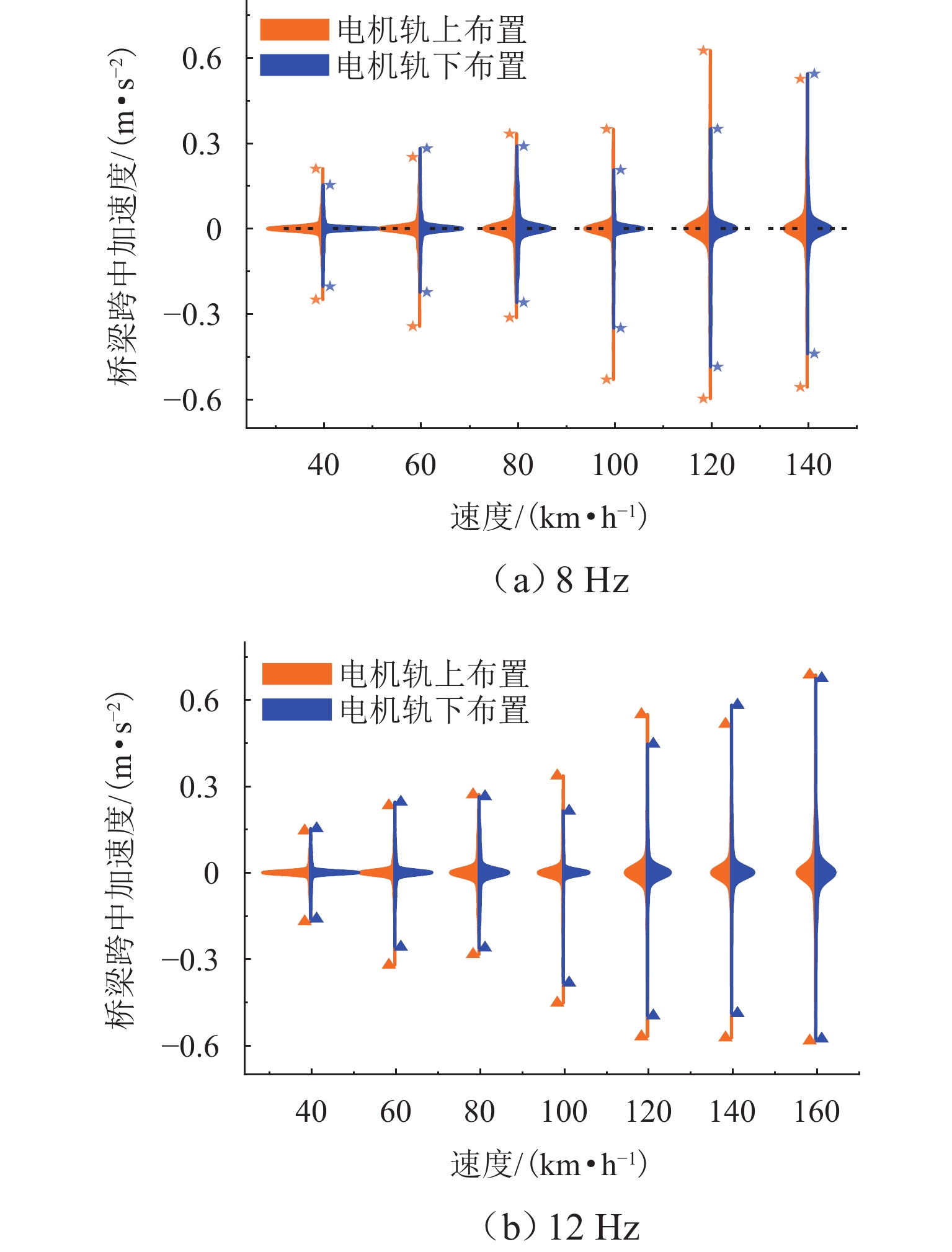
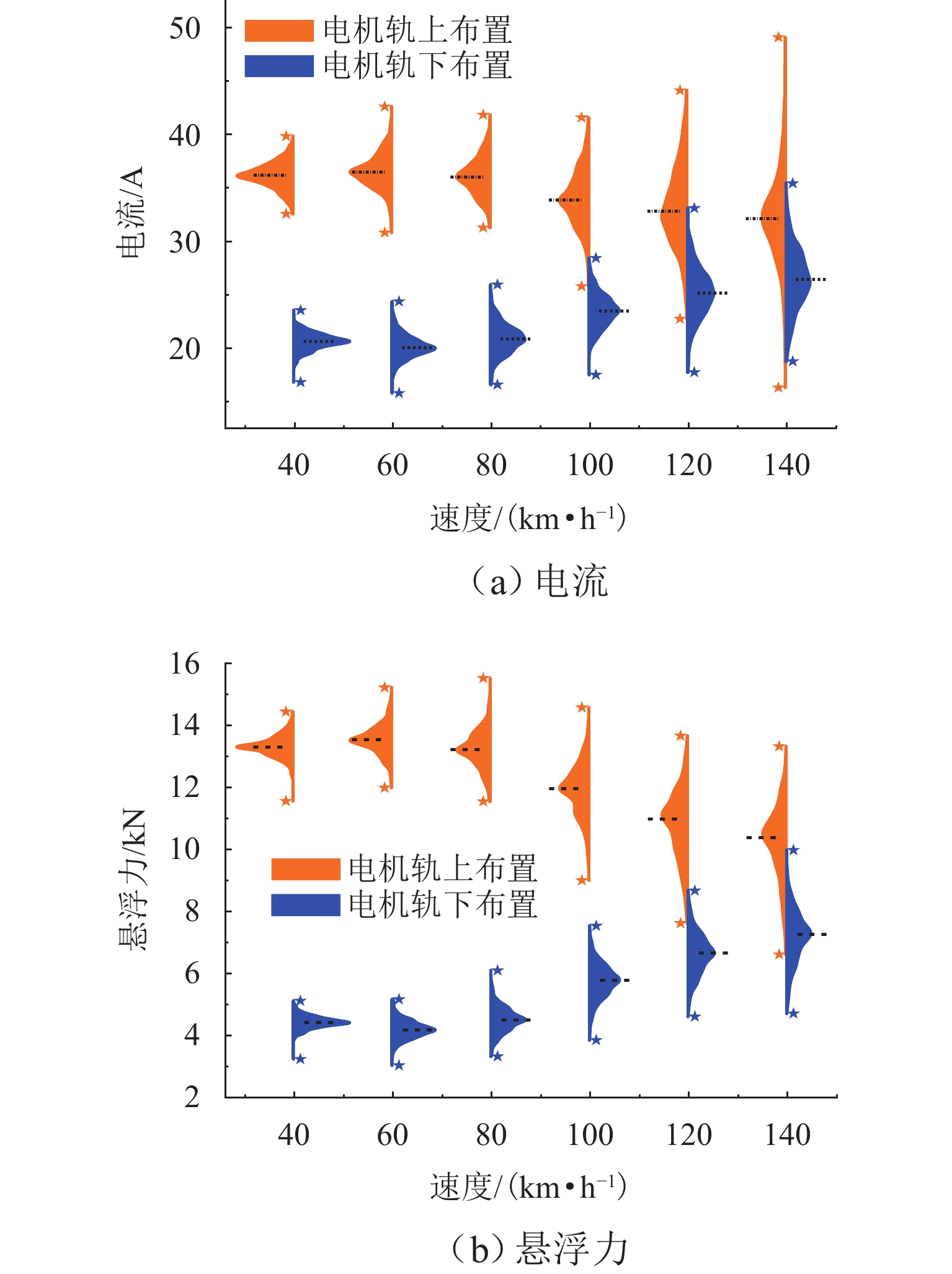
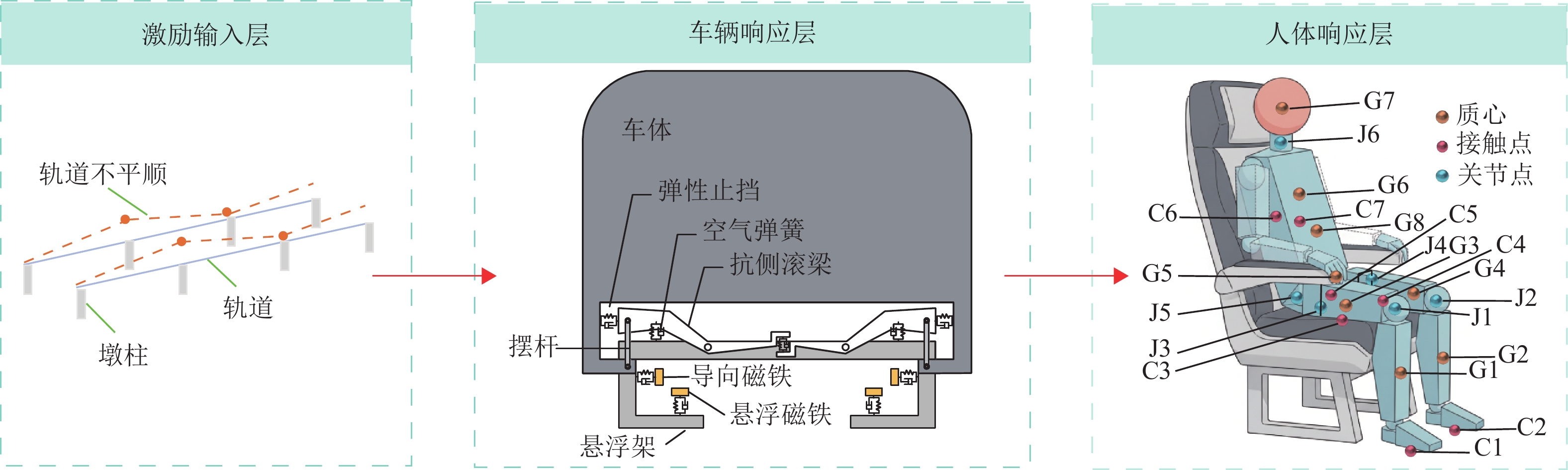
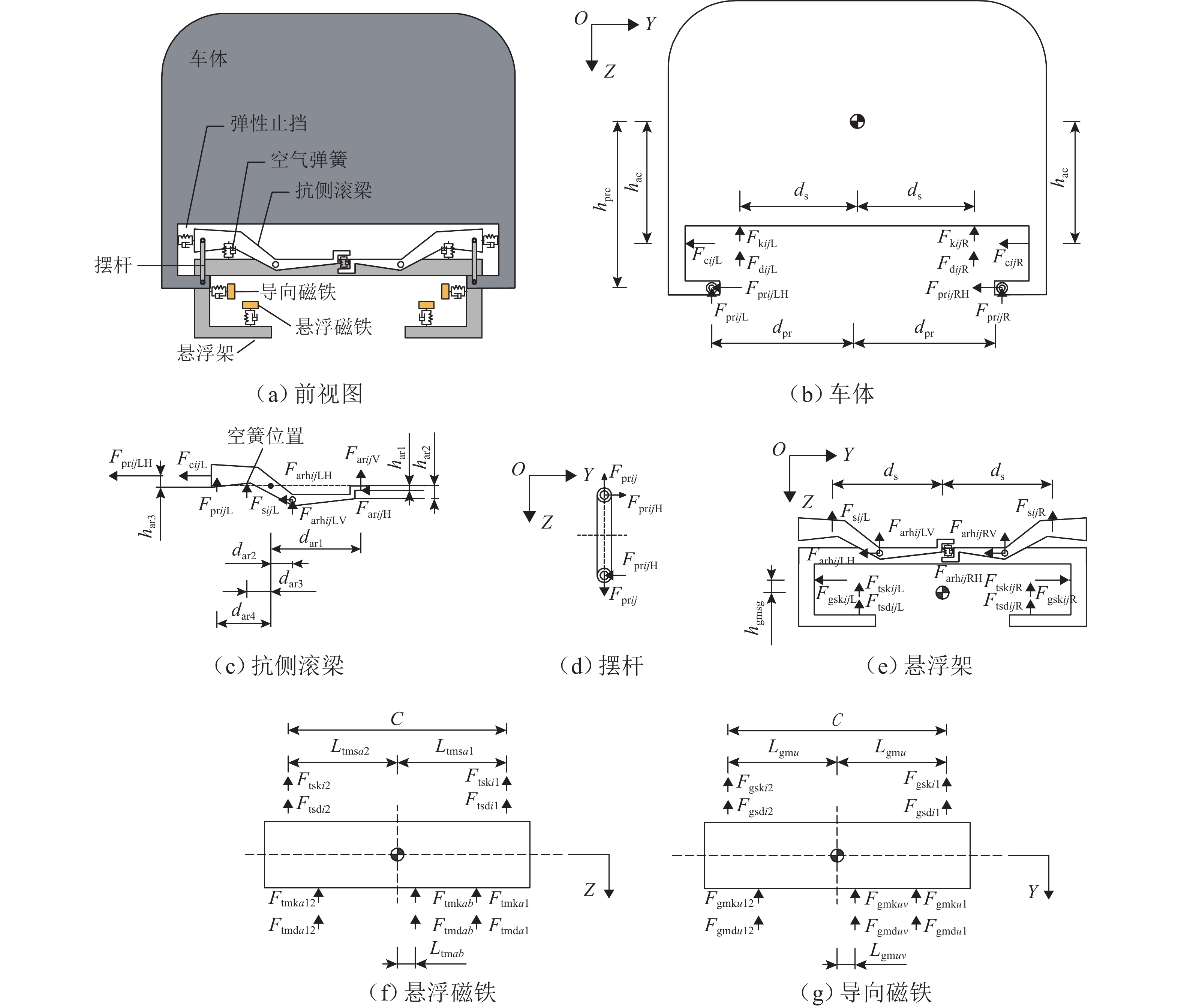
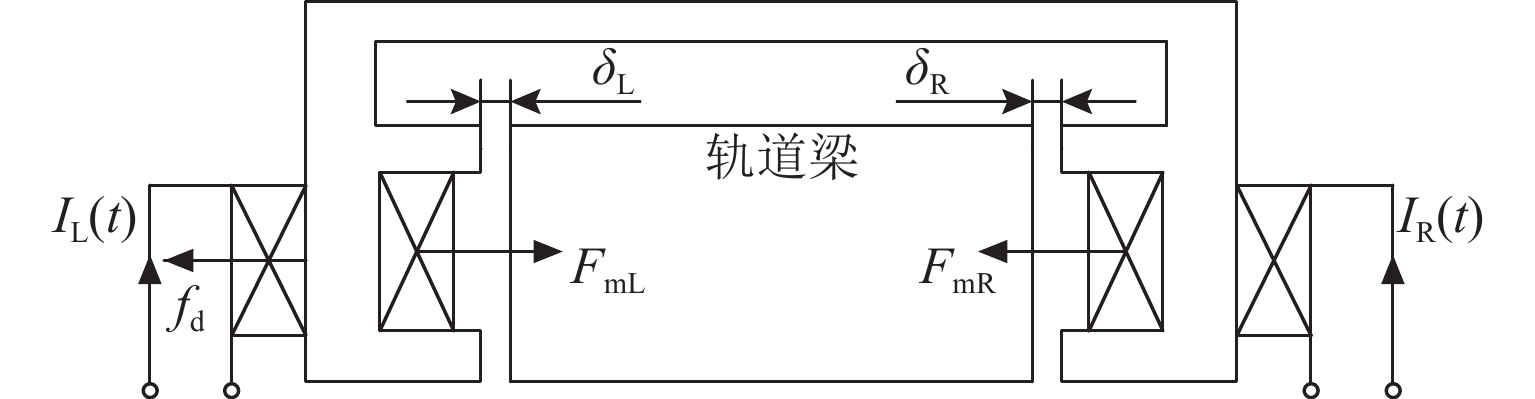
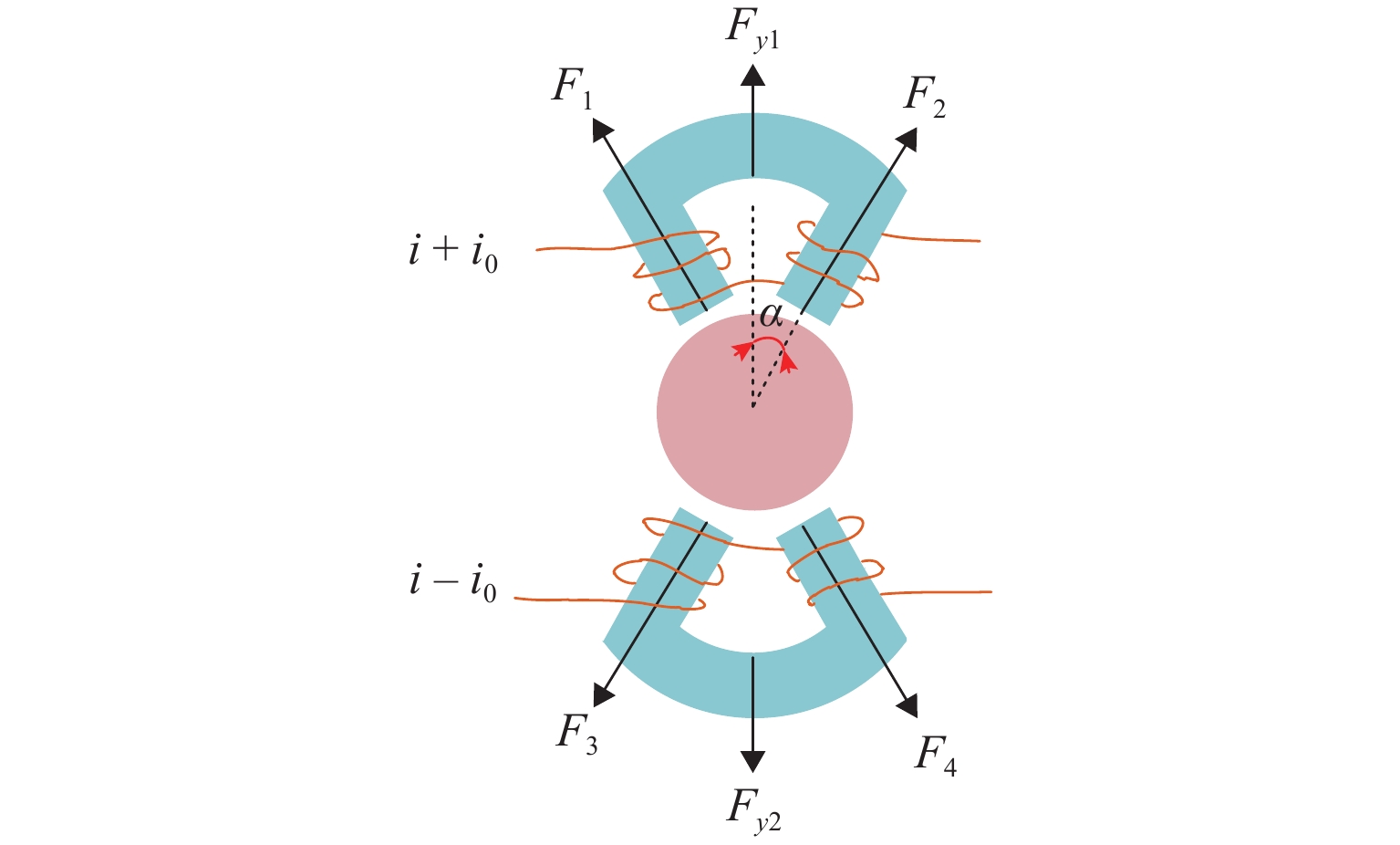
The normal force of linear motors possesses time-varying characteristics and controllability, which are critical to the stable operation of maglev trains. To investigate the influence of normal force direction variations caused by different motor arrangement modes on the dynamic response of the levitation system and vehicle operating behavior, the motion equation of the levitation module was established, and the influence of normal force on the transfer function and rated operating point of the levitation system was analyzed. Furthermore, a dynamic model of the maglev vehicle-bridge coupled system was constructed, which incorporated levitation control, magnetic saturation effect, electromagnetic force of motor, bridge flexibility, rail irregularity, and other factors. The influences of motor arrangement mode, slip frequency, and operating speed on the system response were studied. The results show that with the under-rail motor arrangement (abbreviated as under-rail mode) scheme, a larger normal force of the motor leads to a smaller rated levitation current, a higher relative permeability of the electromagnet core, higher sensitivity of magnetic induction intensity to coil current variation, and better controllability of the levitation system. Meanwhile, the levitation air gap fluctuation and vibration acceleration of the levitation module are significantly reduced. The effect becomes more prominent with a smaller slip frequency and a higher speed. Under the conditions of 8-Hz slip frequency and 140 km/h operating speed, the levitation air gap fluctuation and the vibration acceleration amplitude of the levitation module under the under-rail scheme are reduced by 59% and 49%, respectively, compared with those under the on-rail motor arrangement (abbreviated as on-rail mode) scheme. In addition, the under-rail scheme significantly reduces the rated current and levitation force of the electromagnet, and the difference is more significant with a smaller slip frequency and a lower speed. Under the conditions of 8-Hz slip frequency and 40 km/h speed, the rated current and levitation force are reduced by 43% and 67%, respectively. The results can provide a theoretical basis and technical guidance for the optimization of the running gear of medium-low-speed maglev and the selection of motor slip frequency.
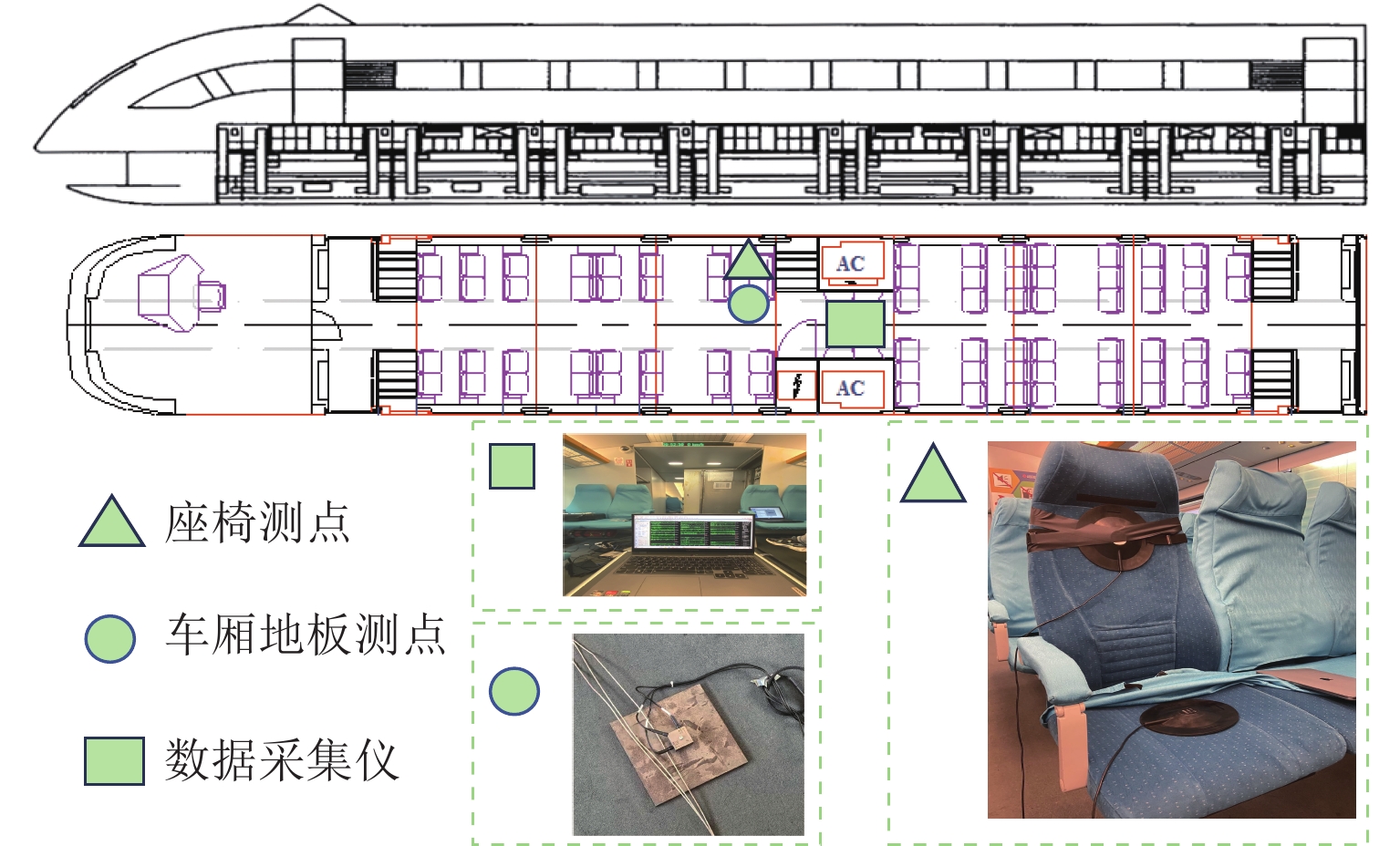
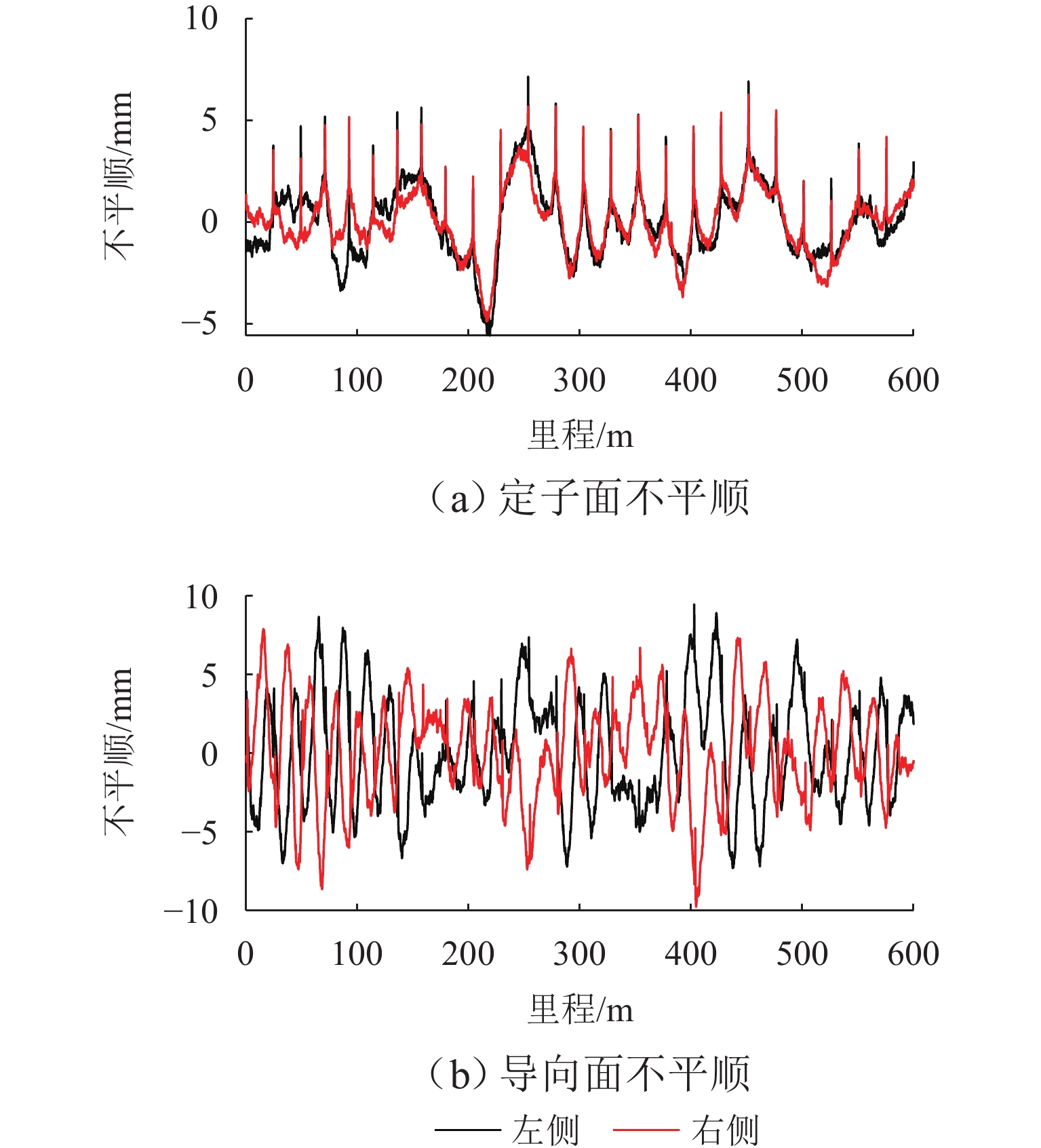
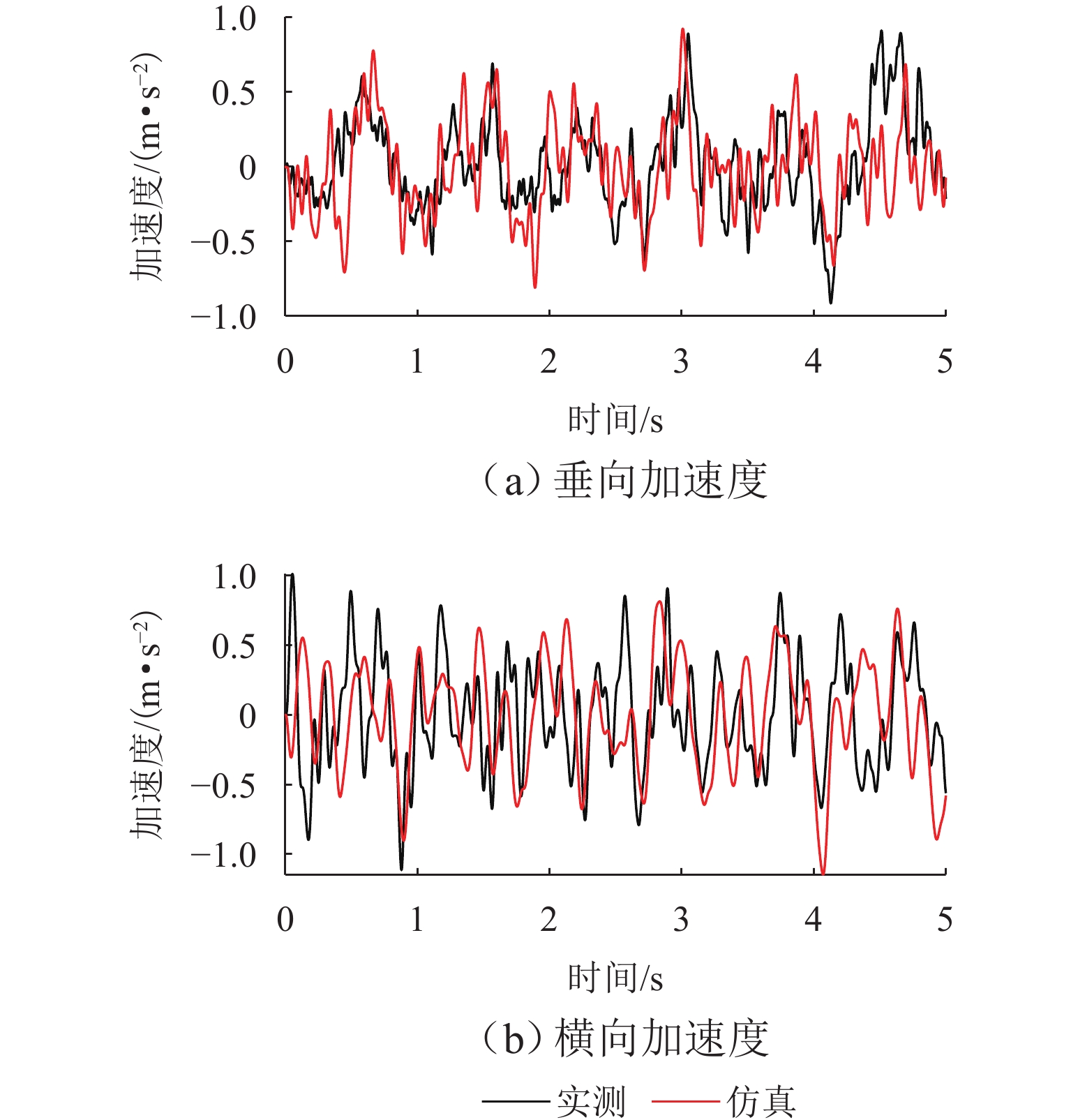
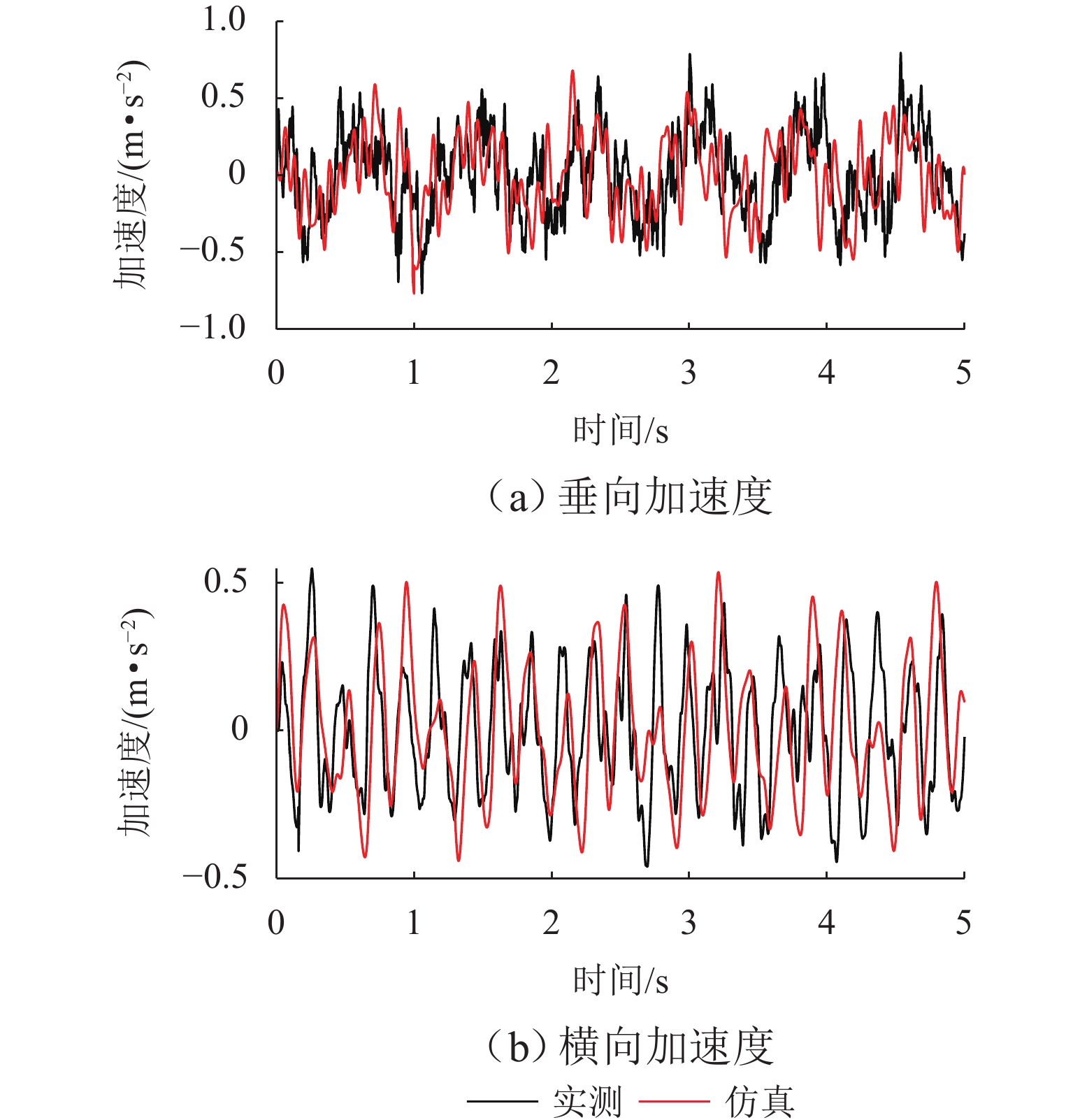
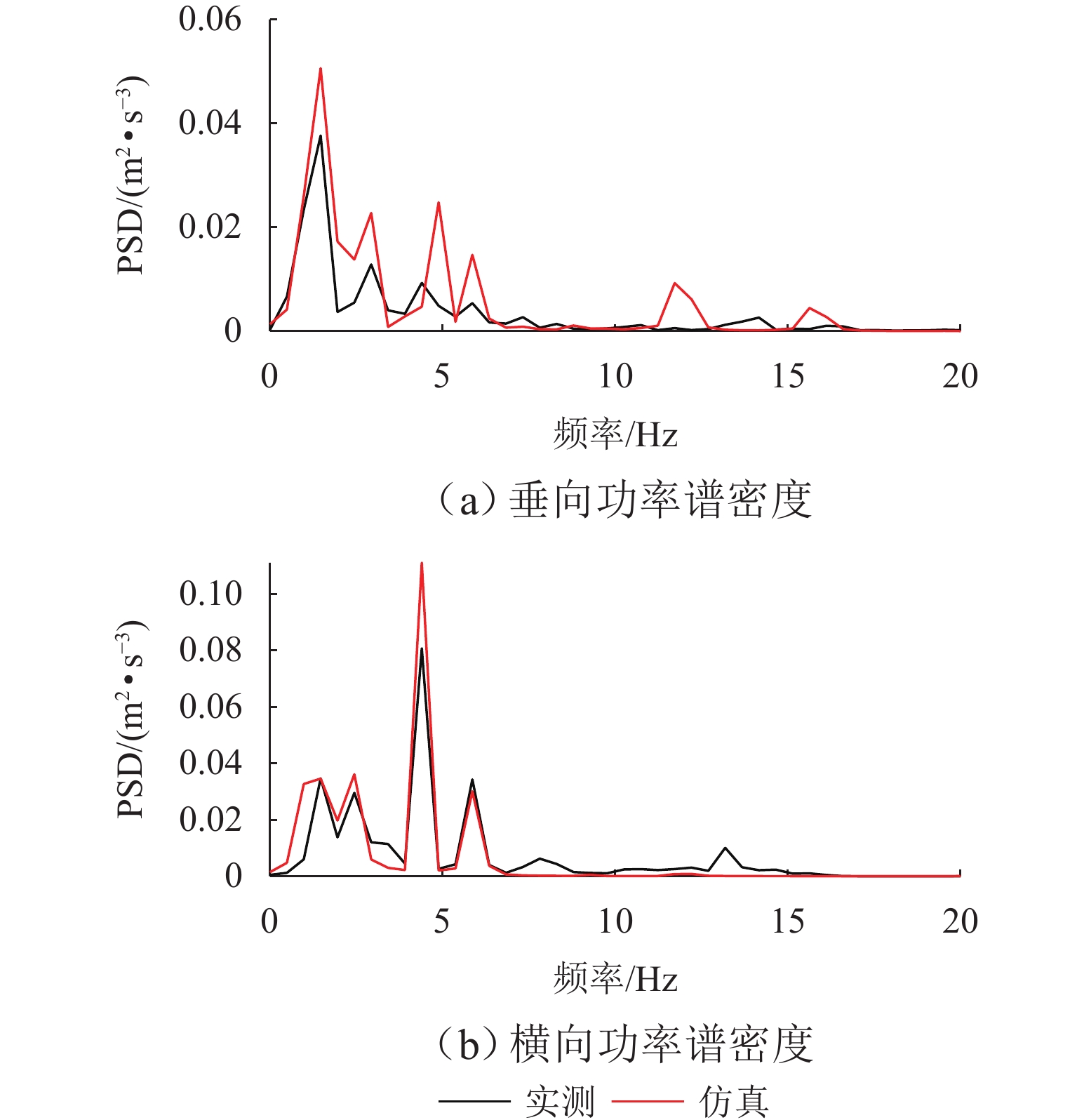
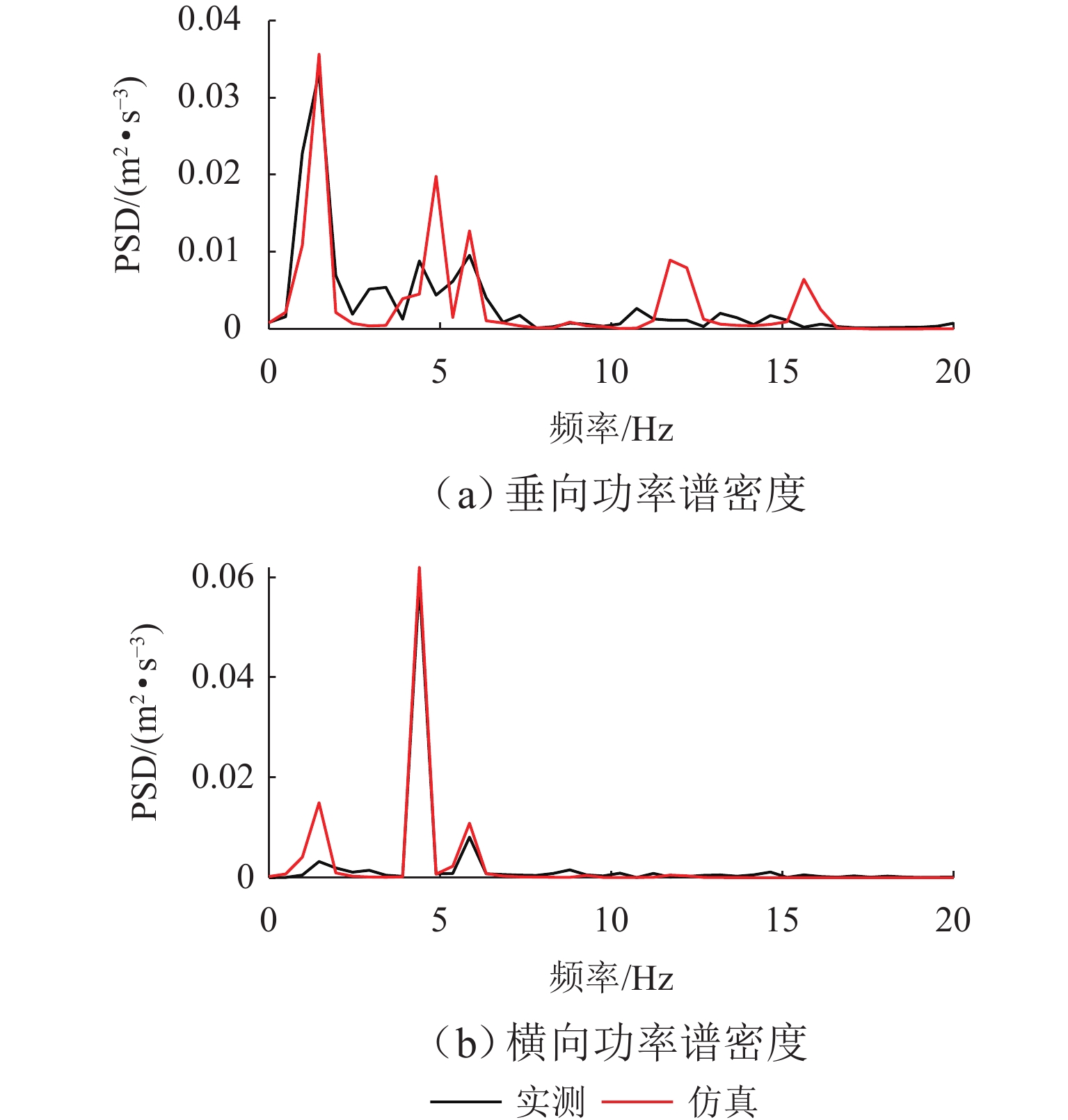
To study the influence of guideway irregularity on ride comfort of 600 km/h high-speed maglev trains and to address the limitations of conventional dynamic models, which lack detailed descriptions of human biological structures and thus fail to reveal the complex interactions between vehicle body motion and resonance of human internal organs, an integrated full-chain “vehicle-guideway-human” coupled dynamic simulation method was proposed. First, a system simulation framework was established based on multibody dynamics and finite element theory, incorporating spatial flexible guideway beams, active levitation/guidance control algorithms, and multibody vehicle dynamics. Second, a 45 degrees of freedom (DOF) three-dimensional seated human biomechanical model was introduced to construct a full-system coupled dynamic model, thereby addressing the distortion at the human perception end in the vibration transmission path. Then, system modal analysis was employed to reveal the coupling mechanism between vehicle body motion and the resonance of human internal organs and skeletal system. Finally, the model was validated using measured data from the Shanghai high-speed maglev demonstration line. The results indicate that according to the standard (GB/T 5599—2019), the measured vertical and lateral ride quality indices are 2.33 (excellent) and 2.61 (good), respectively, while the simulated values are 2.28 and 2.56, with relative errors of only 2.15% and 1.92%, respectively. Furthermore, for the seat surface vibration directly perceived by the human body, the measured peak vertical and lateral accelerations are 0.915 m/s2 and 1.115 m/s2, respectively, with corresponding simulation errors controlled within 5.00% (0.76% and 2.91%, respectively). In the frequency domain, the model not only accurately reproduces the car body’s rigid body mode at approximately 1.5 Hz but also precisely captures the coupled resonance peaks in the 4.0–6.0 Hz band dominated by human biomechanical characteristics, thereby verifying the effectiveness of the model in refined ride comfort prediction.
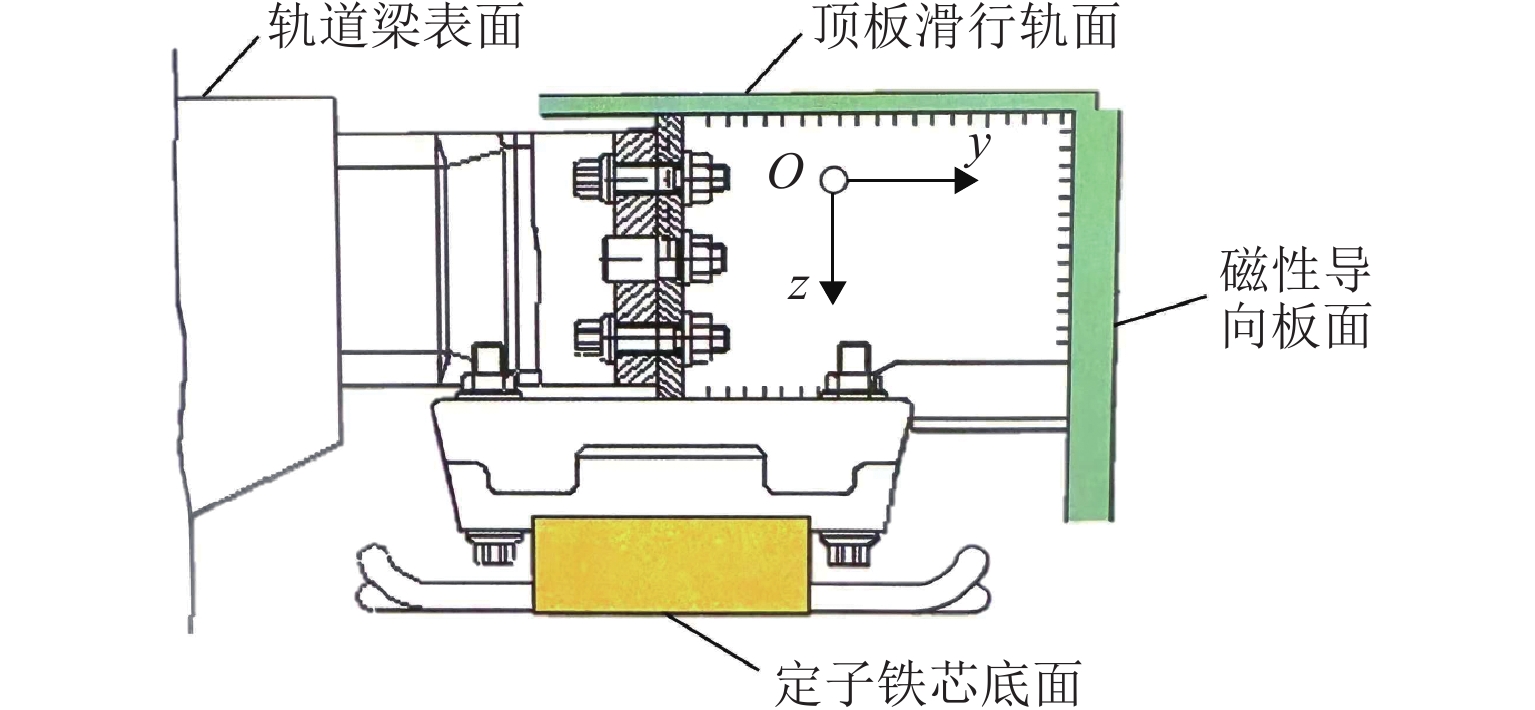
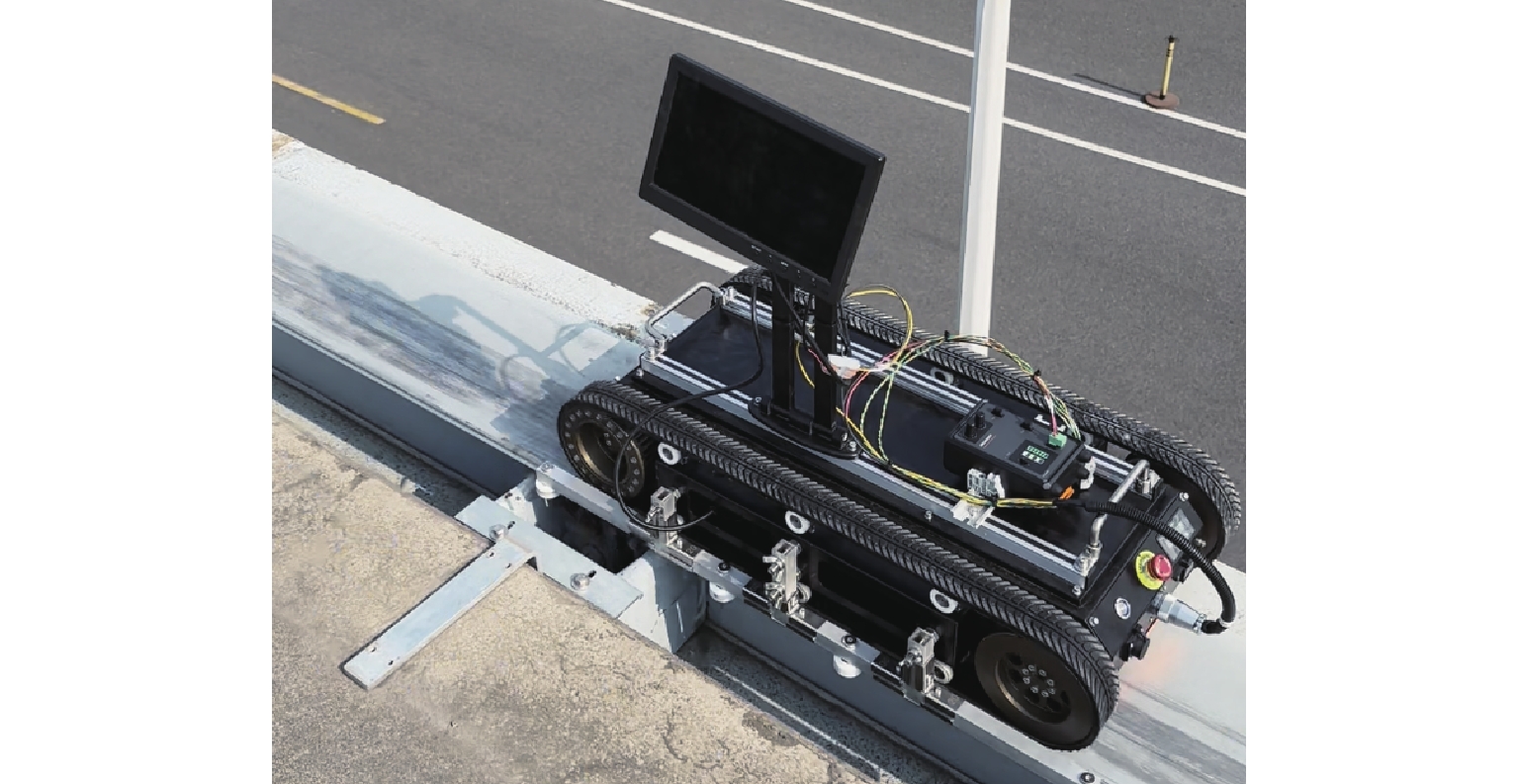
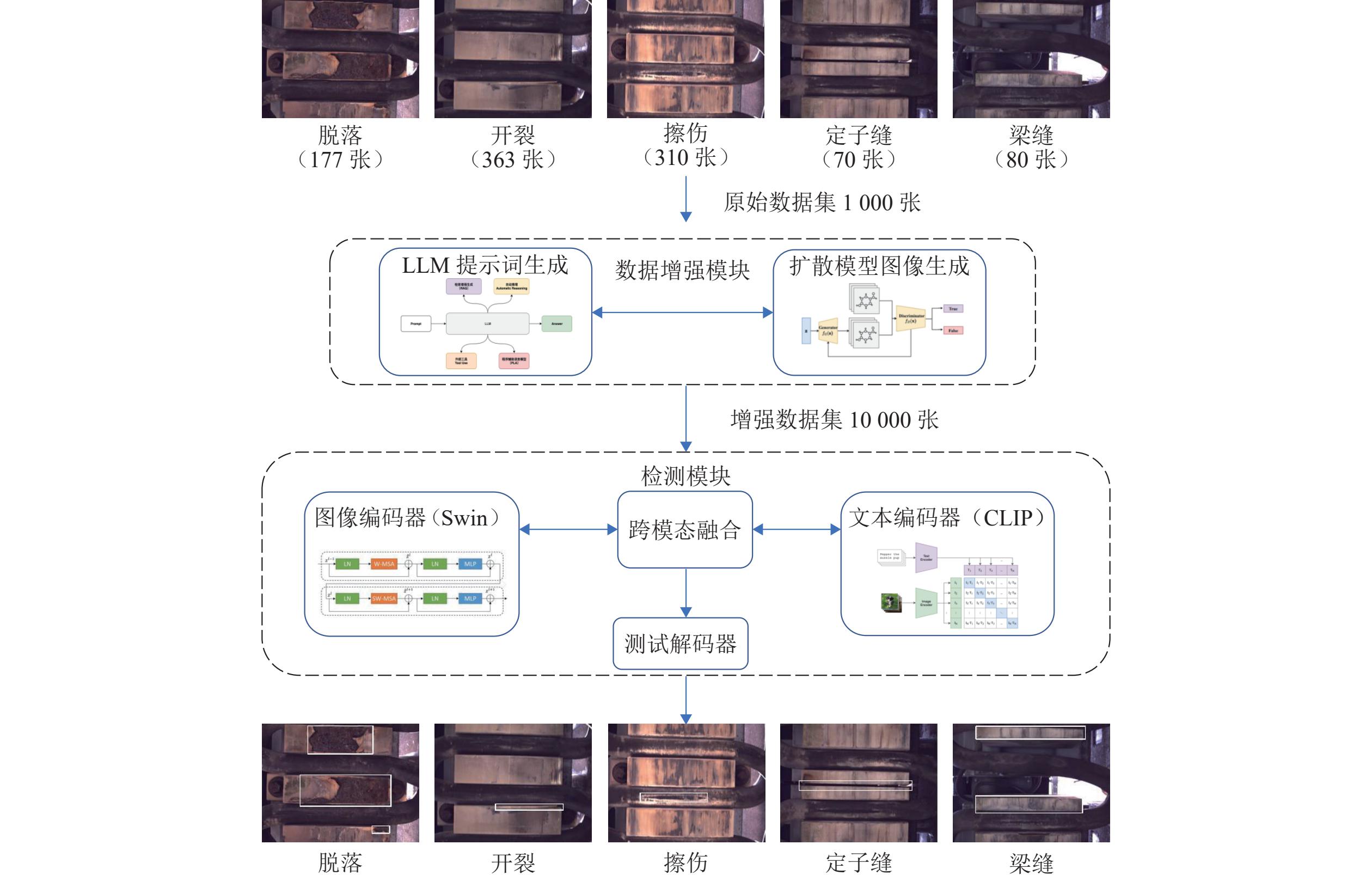
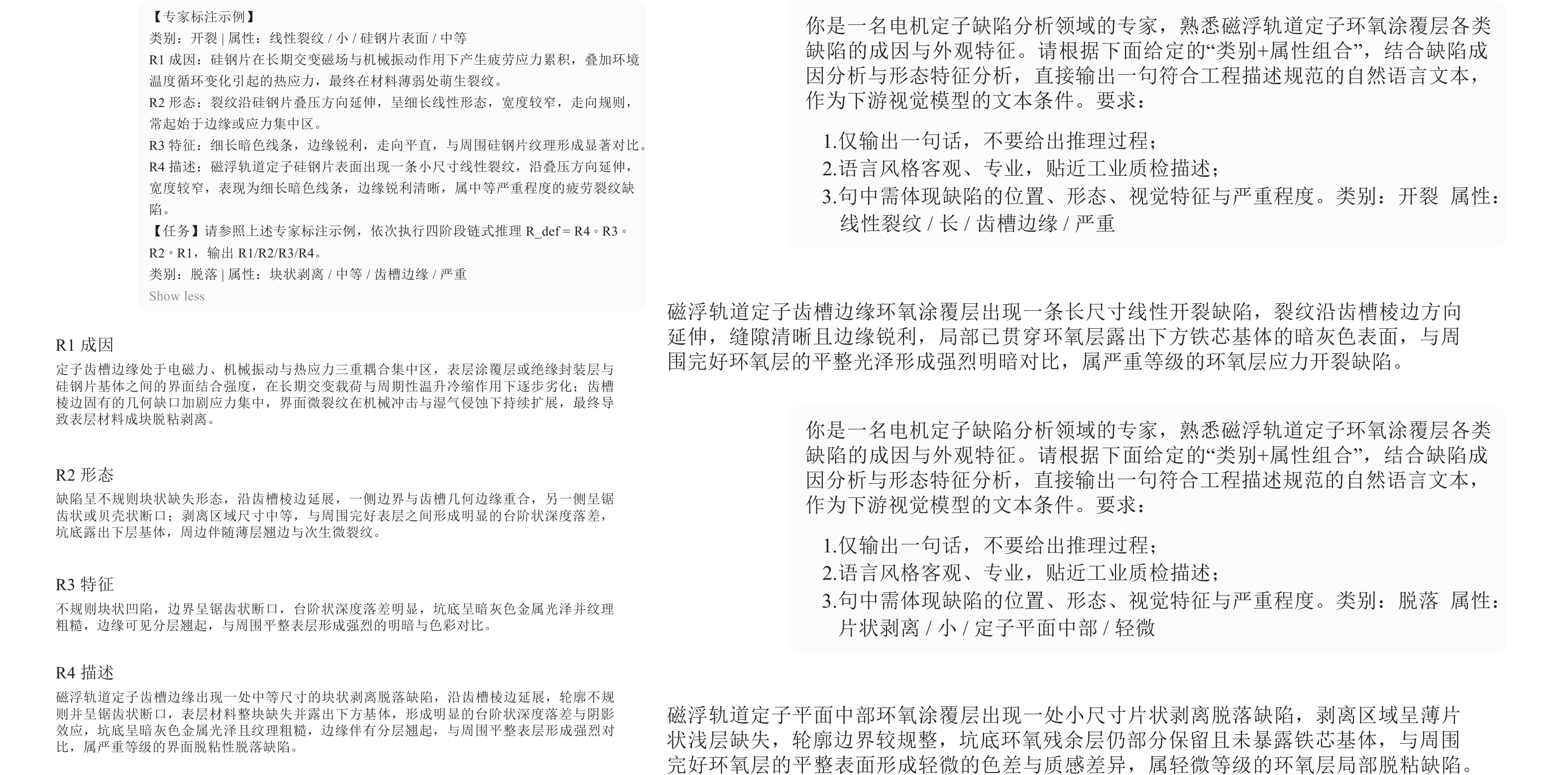
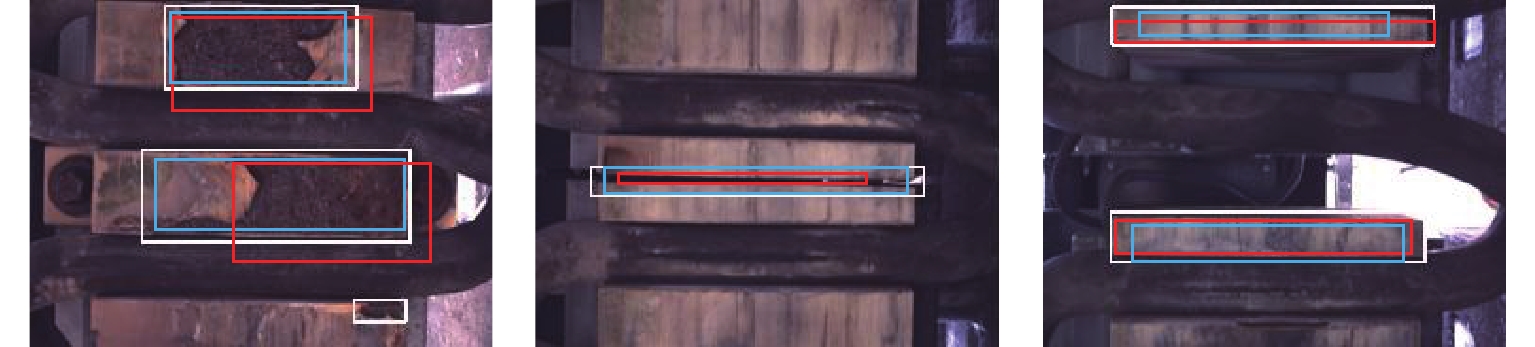
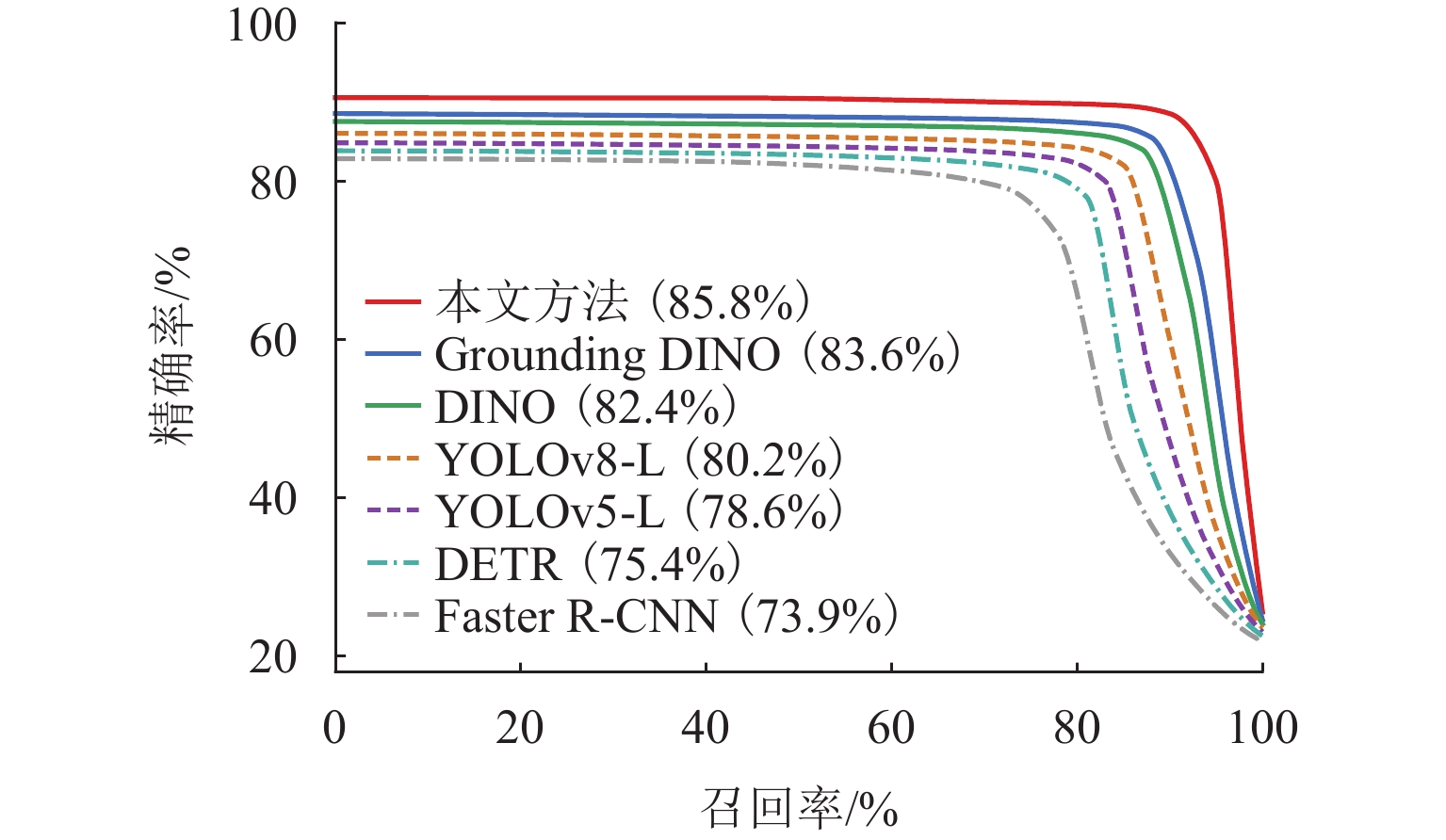
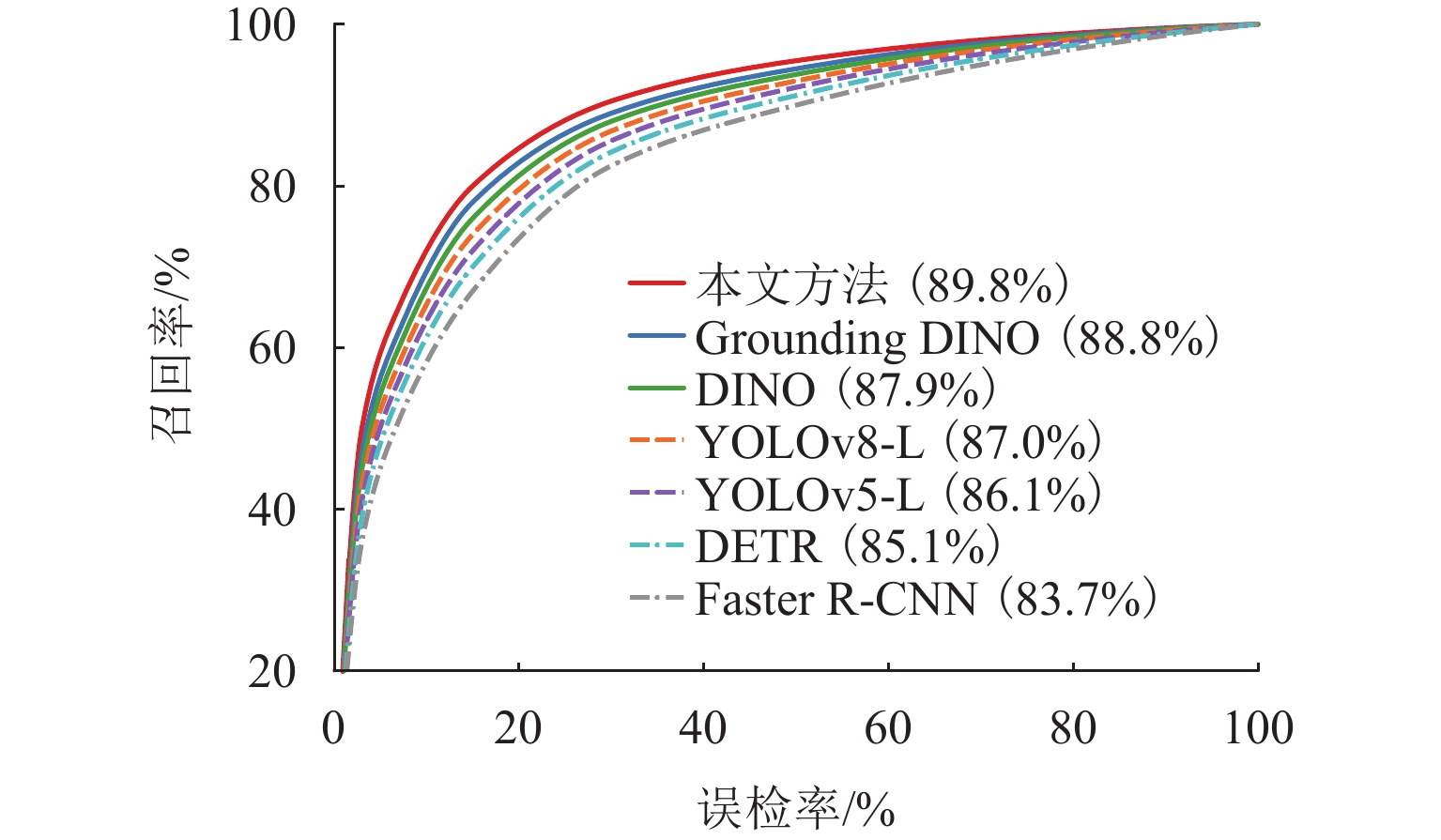
To solve the problems of insufficient data volume and unbalanced category distribution in the detection of the stator surface of maglev tracks, a vision-language fusion detection method based on a large language model-guided diffusion model was proposed. First, given the current situation of scarcity and unbalanced distribution of five types of samples (spalling, cracking, scratching, stator gap, and beam gap), a prompt word generation strategy guided by a large language model was designed to generate diversified semantic descriptions of defects through chain-of-thought reasoning. Secondly, the generated prompt words and spatial mask constraints were input into a latent diffusion model to generate high-quality samples with similar distributions, effectively expanding the data of scarce categories. Finally, a detection network fusing vision and language modalities was constructed, where bidirectional cross-attention fusion of images and texts was achieved through a feature enhancer, a language-guided query selection mechanism was adopted to dynamically generate detection queries, and a cross-modal decoder was designed to complete multi-stage feature interaction. The research results indicate that under the condition of data augmentation assisted by the large language model, the quality of generated samples increases by approximately 15% compared with traditional generation methods, and the average detection accuracy of the detection network on the five categories increases by approximately 7% compared with baseline methods.
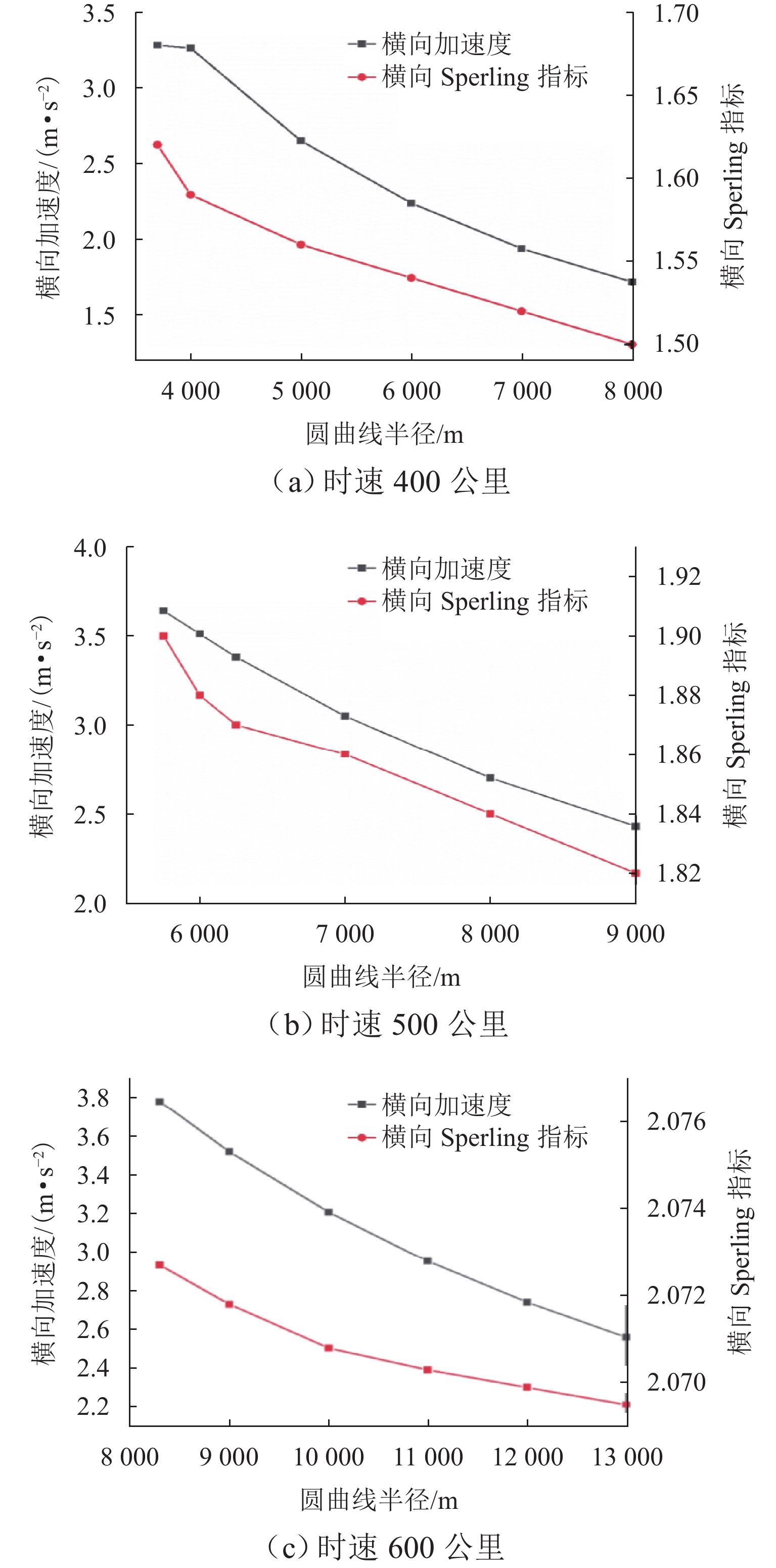
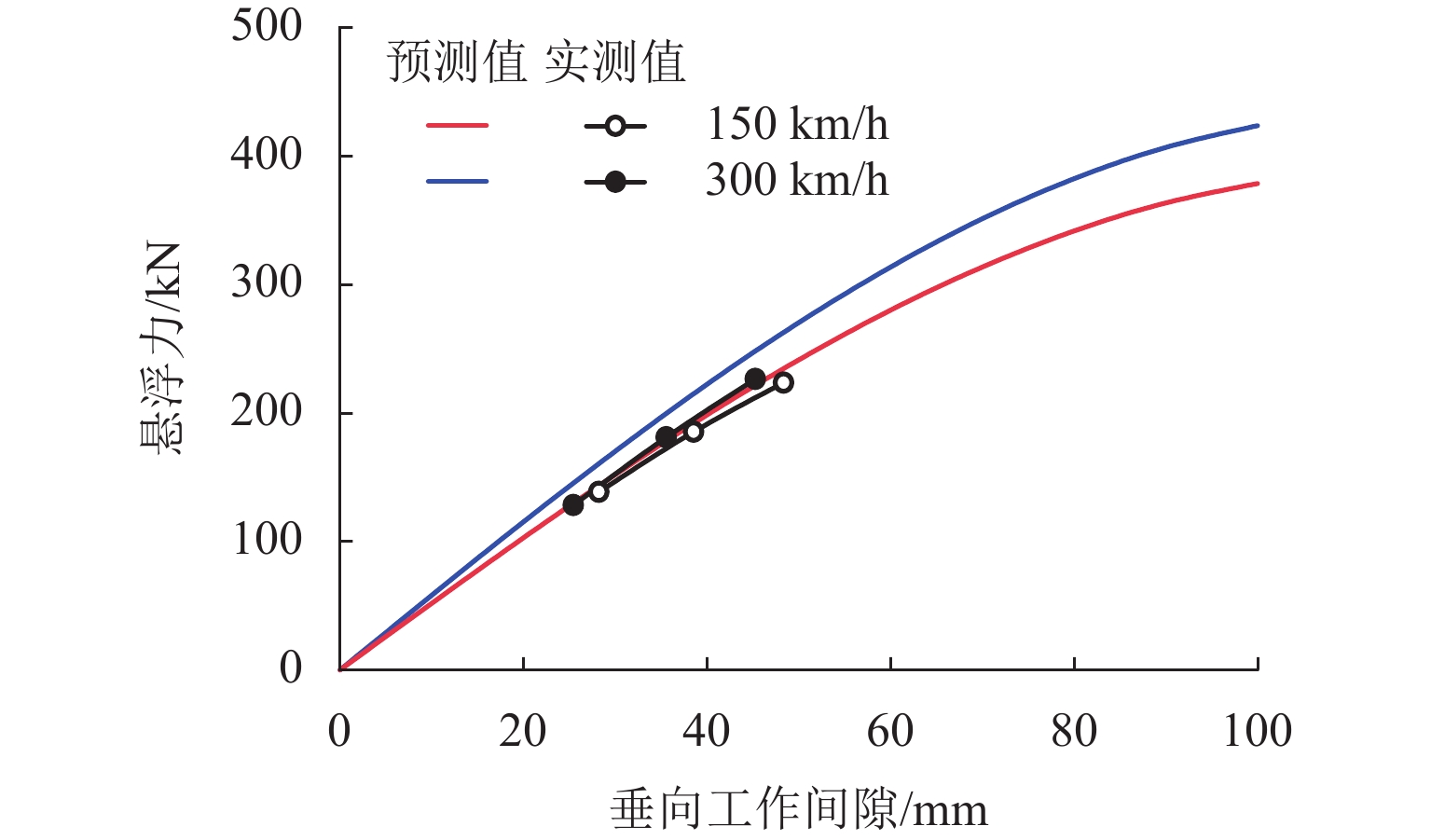
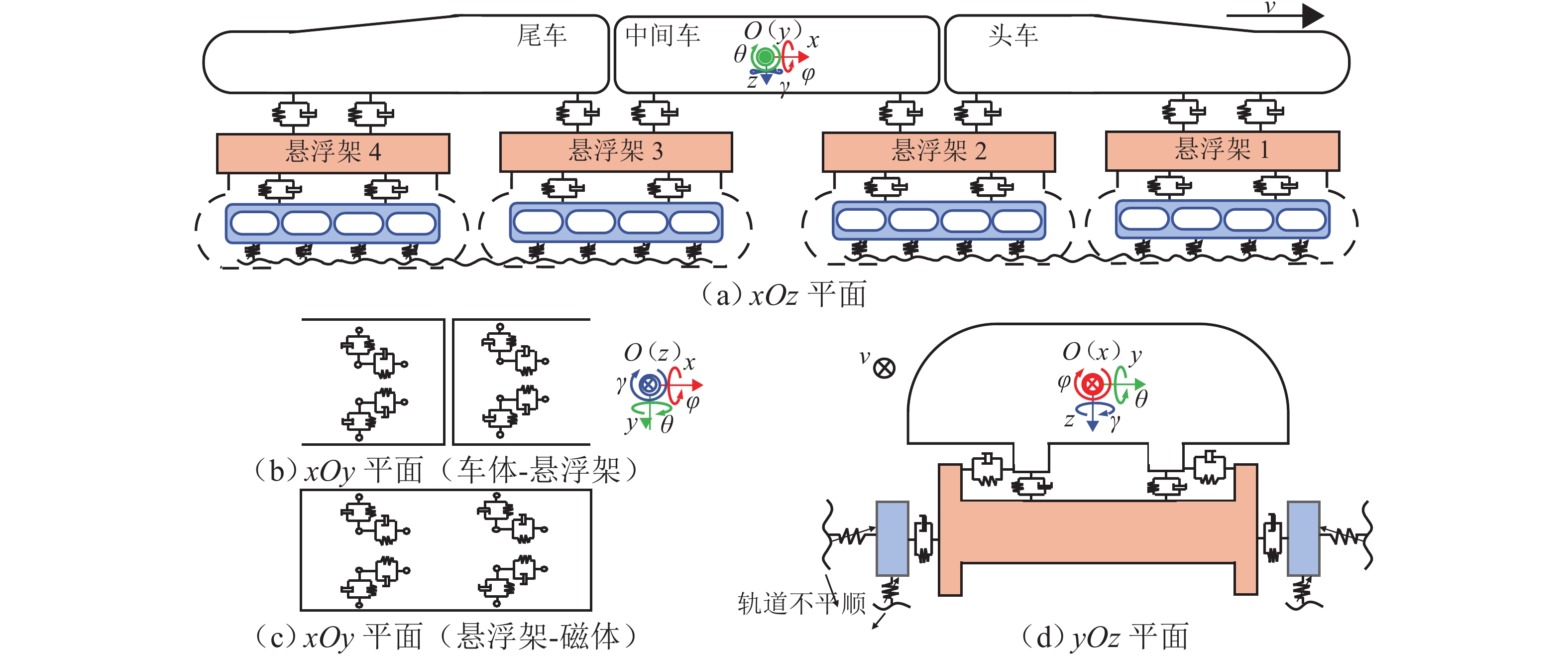
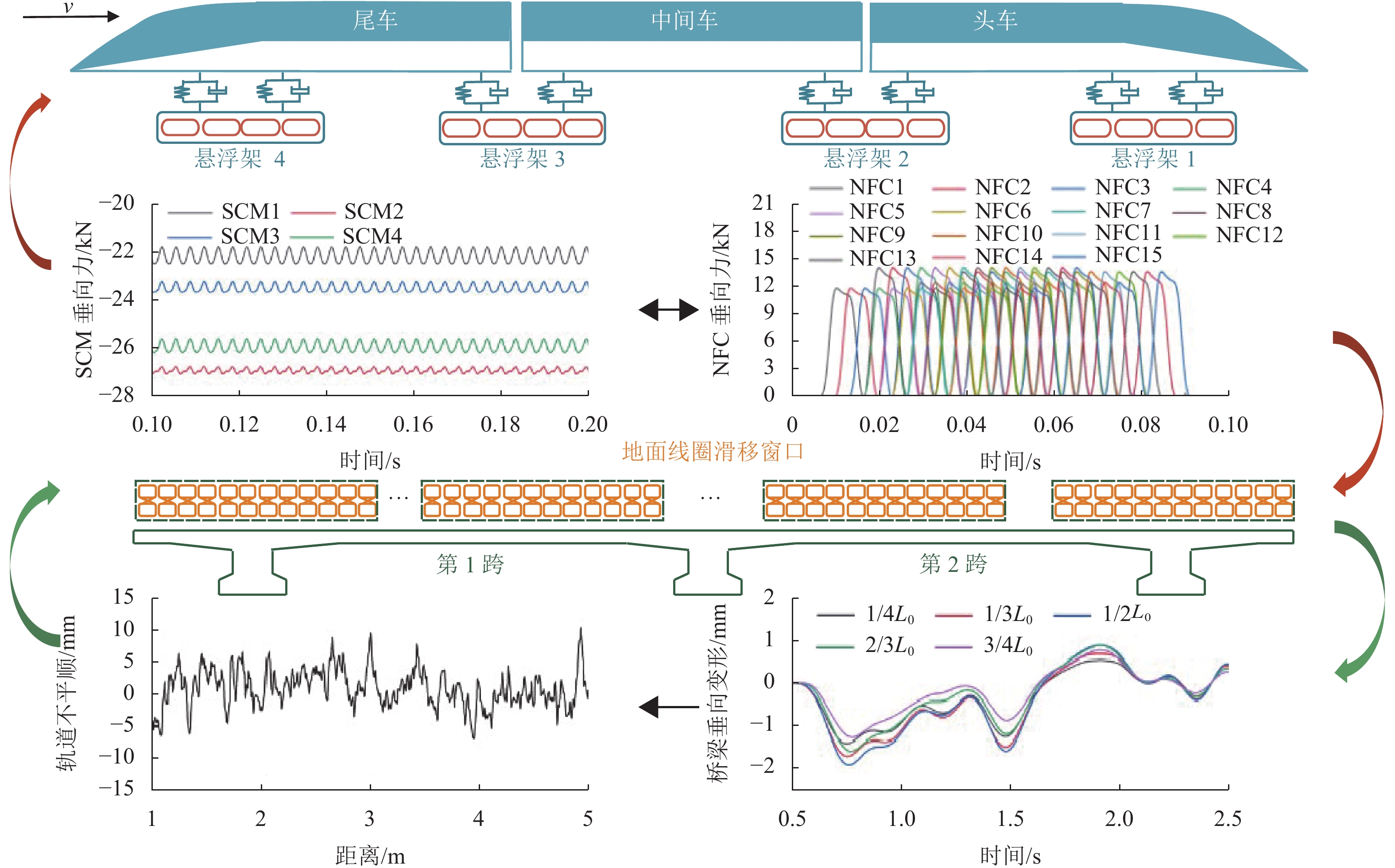
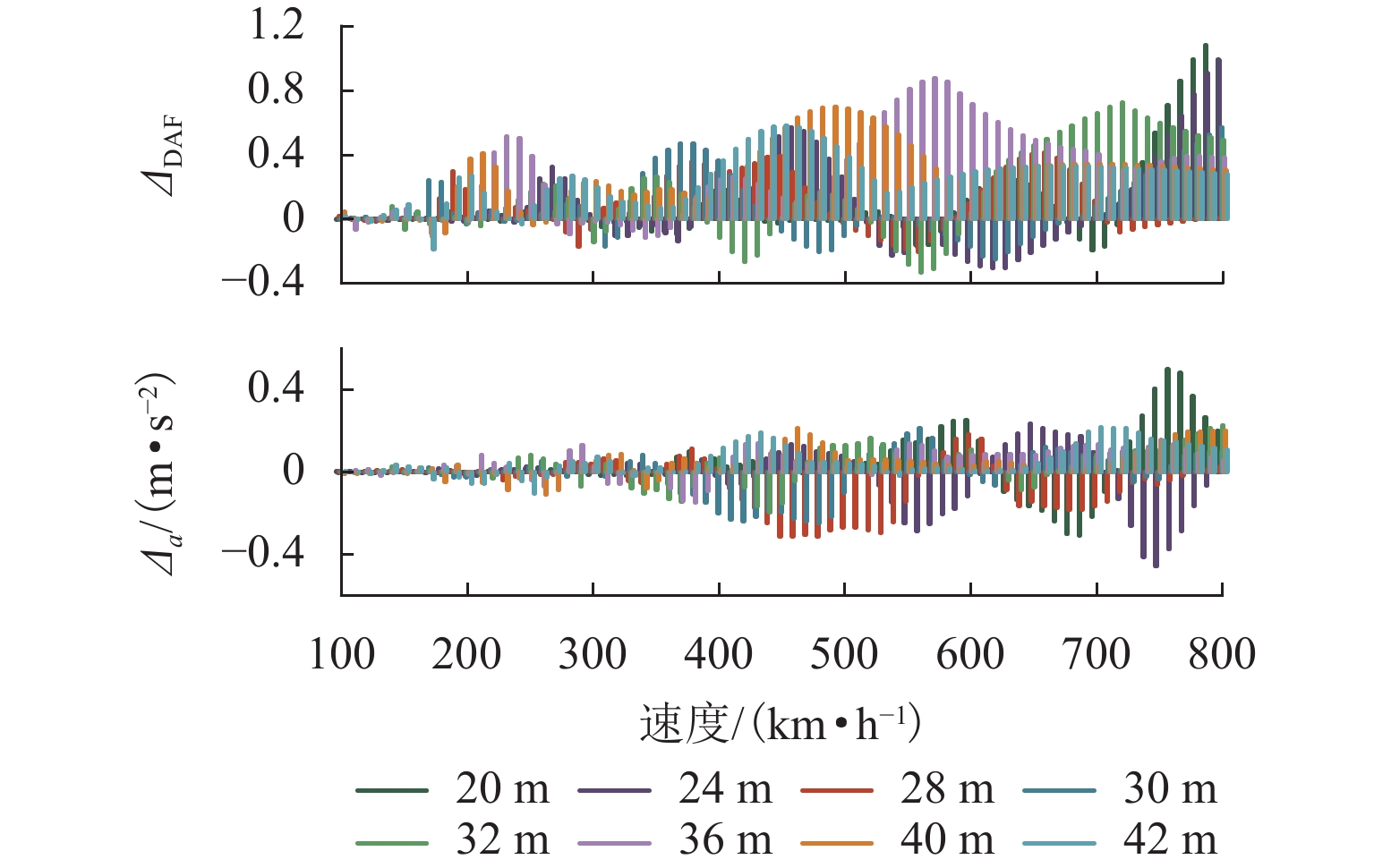
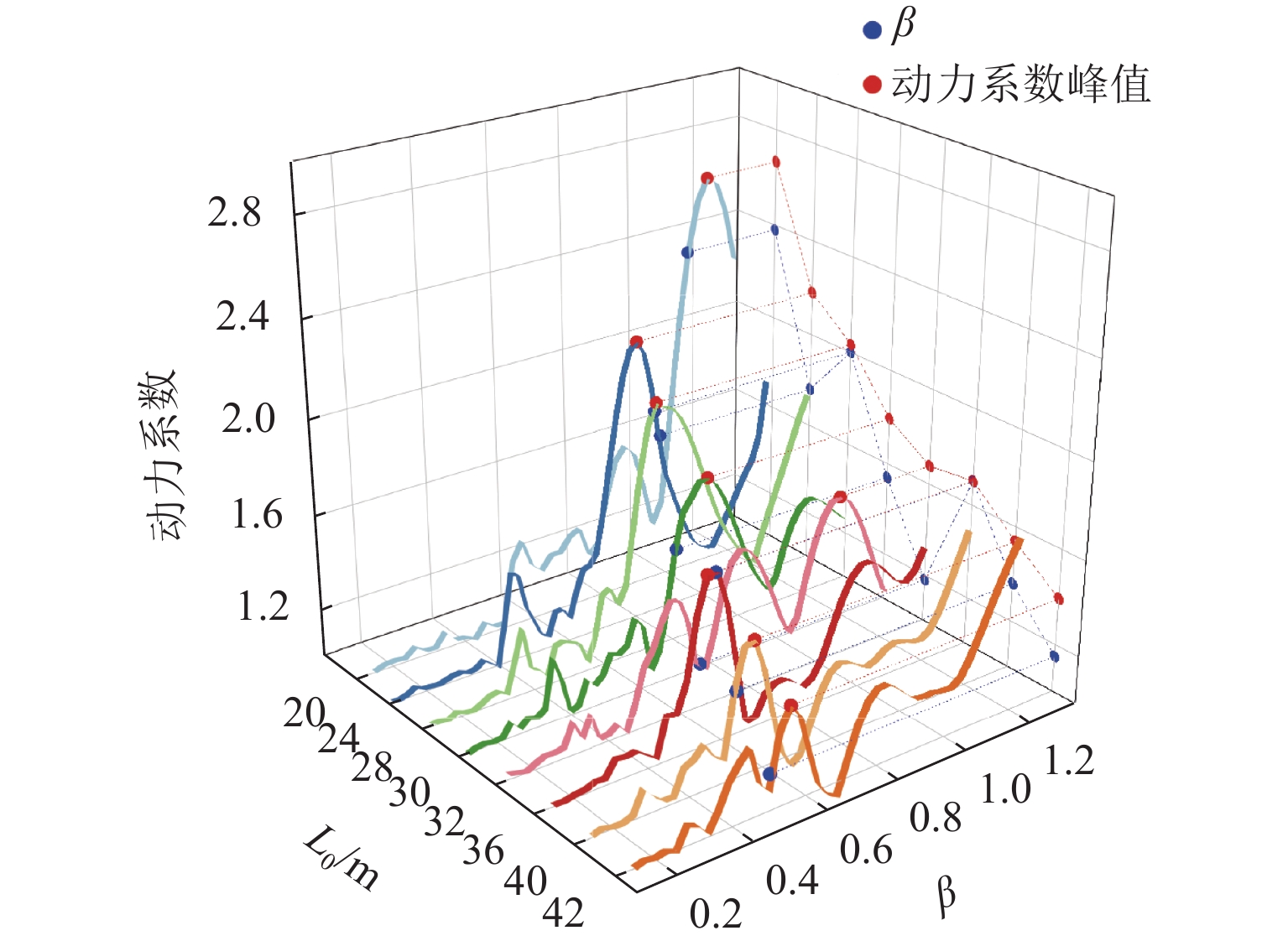
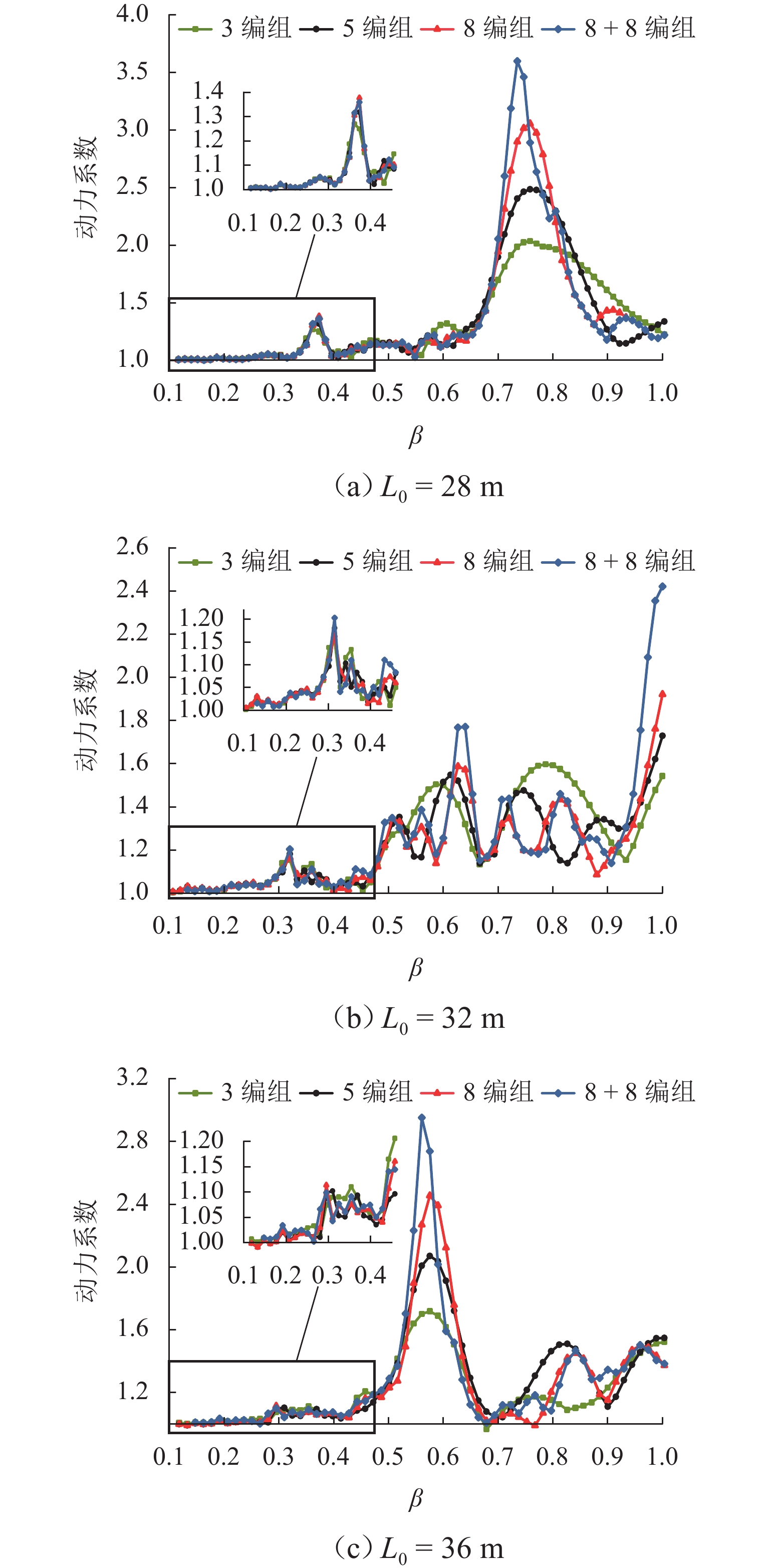
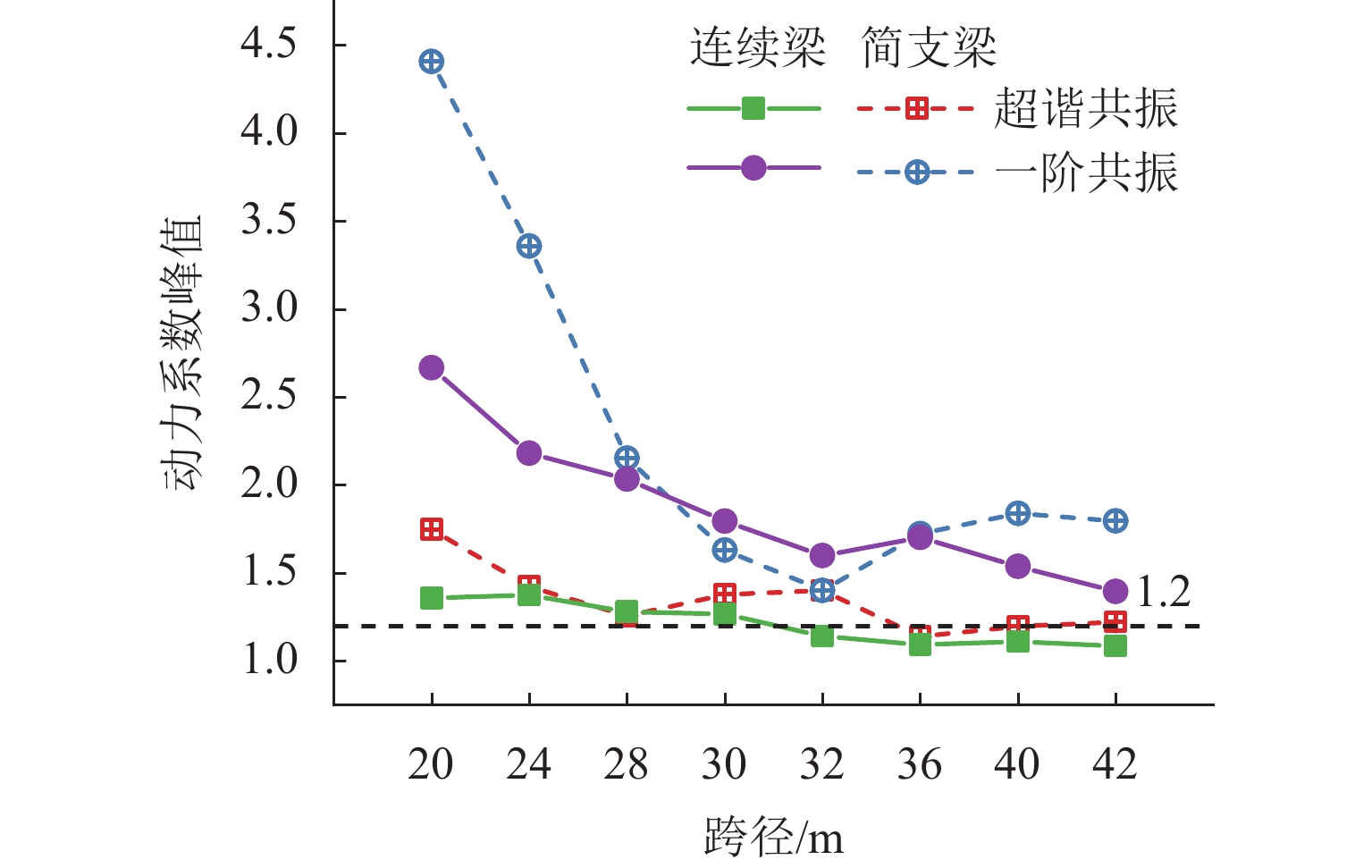
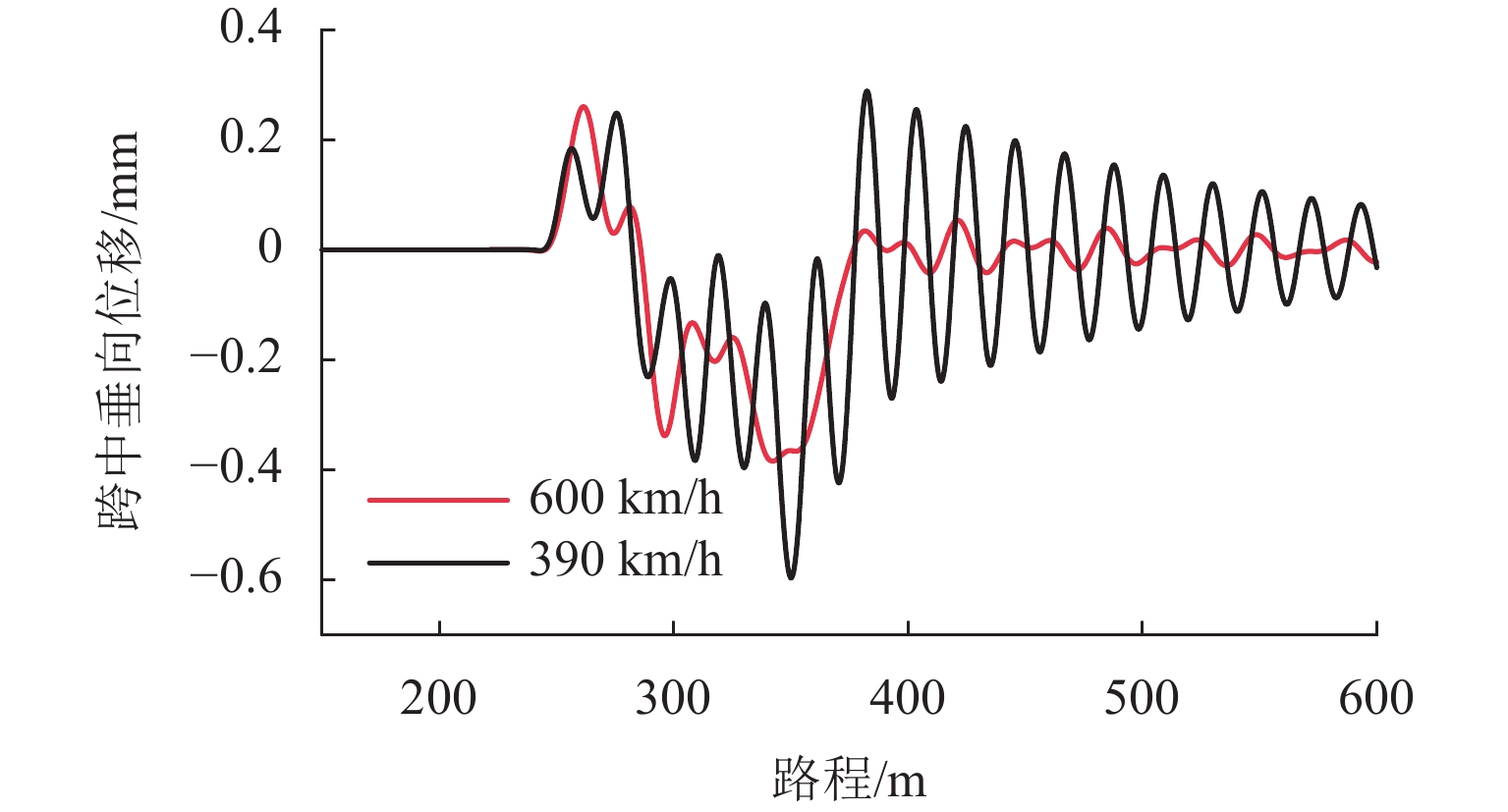
To address the relatively limited research on the coupled dynamic interaction between superconducting electrodynamic suspension trains and continuous beam bridges, a coupled dynamic model of a superconducting electrodynamic suspension train and a two-span continuous beam bridge was established. The effects of bridge span and train marshalling on the dynamic response of the continuous beam were analyzed, and the parameters of the continuous beam bridge were selected based on the dynamic amplification factor. On this basis, the coupled vibration responses of the train-bridge system were calculated. The results indicate that the influence of train marshalling on the dynamic response of the bridge depends on the ratio of the bridge span to the vehicle spacing. When the ratio approaches 1.5, a significant vibration suppression effect of the bridge is observed. When the ratio is higher than 1.5, although primary resonance occurs, the superharmonic resonance response is small and insensitive to the number of train marshalling. When the ratio is lower than 1.5, the resonance energy accumulates significantly with the increase in train marshalling, resulting in poor train-bridge matching. Parametric analysis based on the limit of the dynamic amplification factor shows that the two-span continuous beam is slightly superior to a simply supported beam with the same span in terms of superharmonic resonance control. Within the speed range of 0–600 km/h, the continuous beam allows for a lower limit of the fundamental frequency, indicating that structural stiffness requirements can be reduced while satisfying dynamic safety, thereby improving economic efficiency. In the coupled train-bridge vibration analysis under the selected bridge parameters, the Sperling ride index of all vehicles consistently remains within the “excellent” limit. Notably, because the intermediate vehicles satisfy the vibration suppression matching conditions, the change in dynamic response at the resonance speed is minimal.
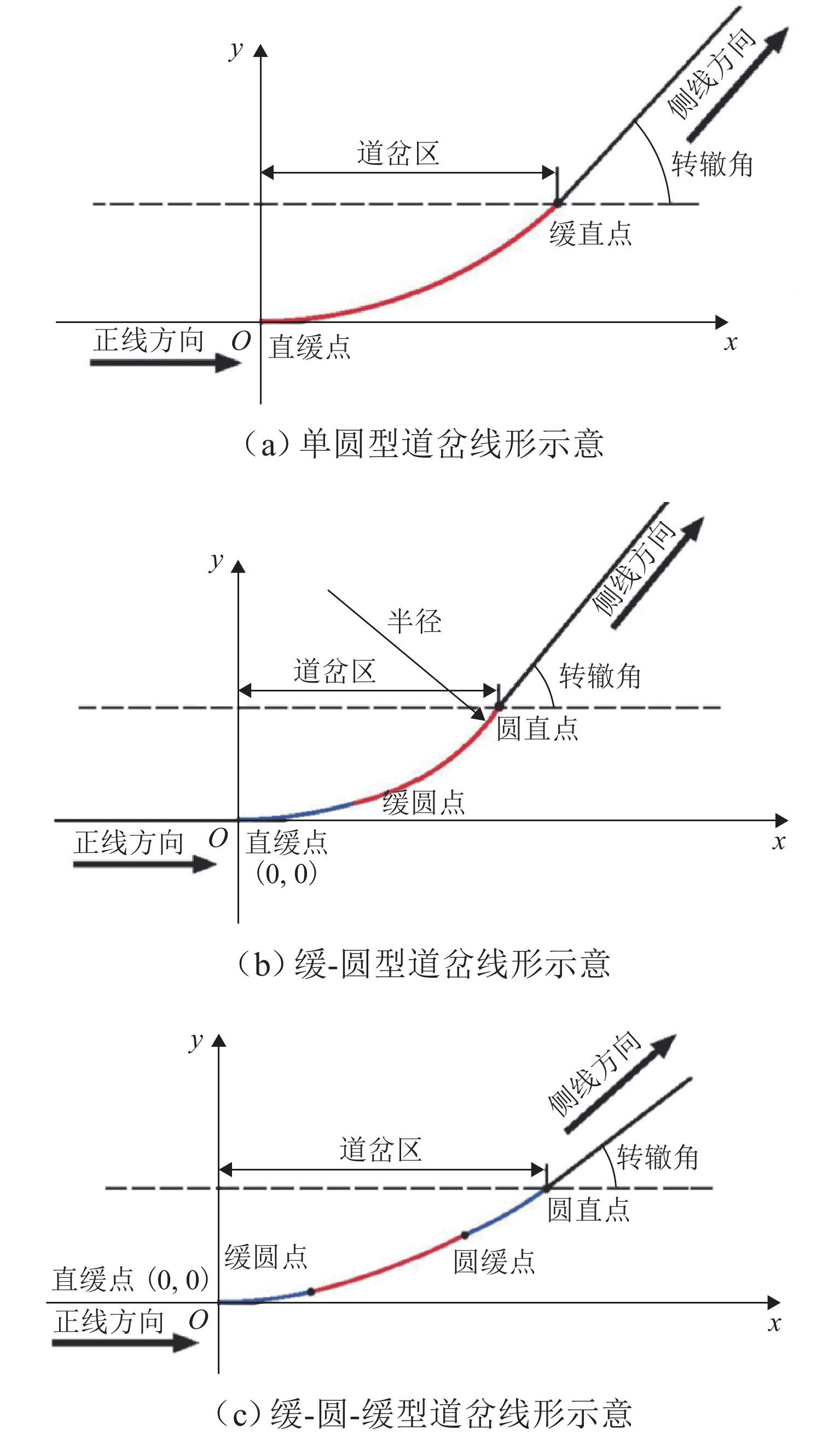
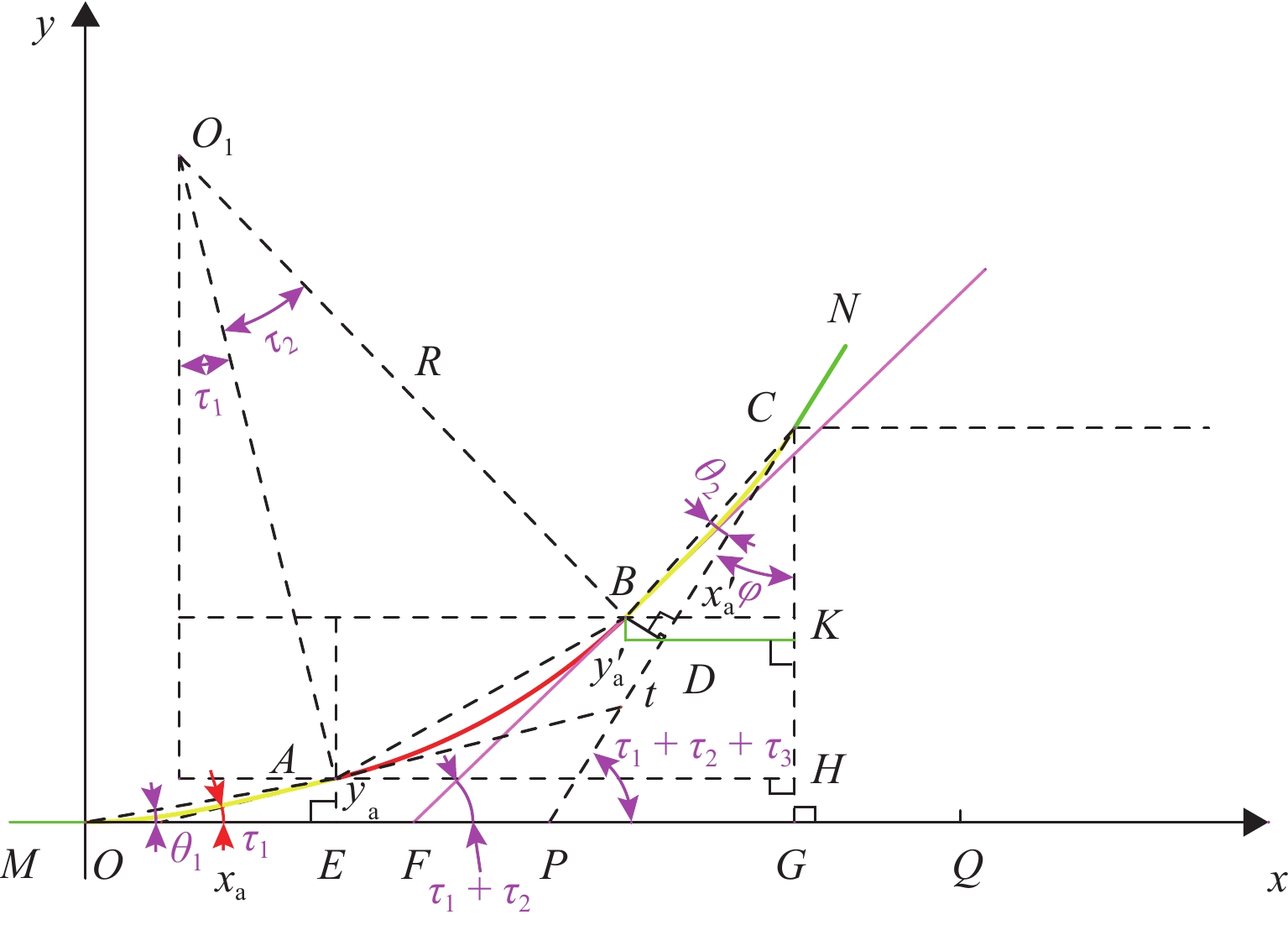
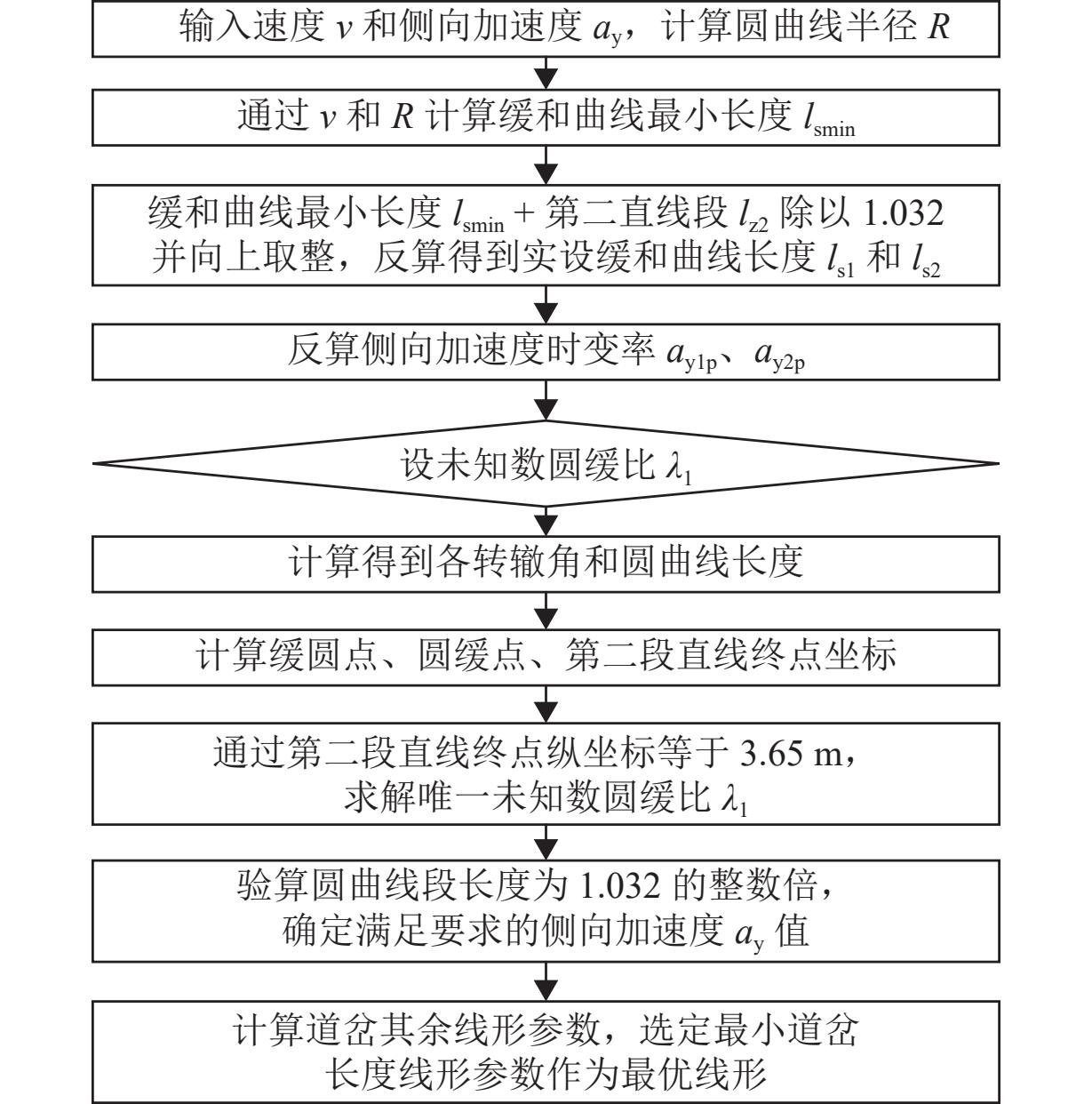
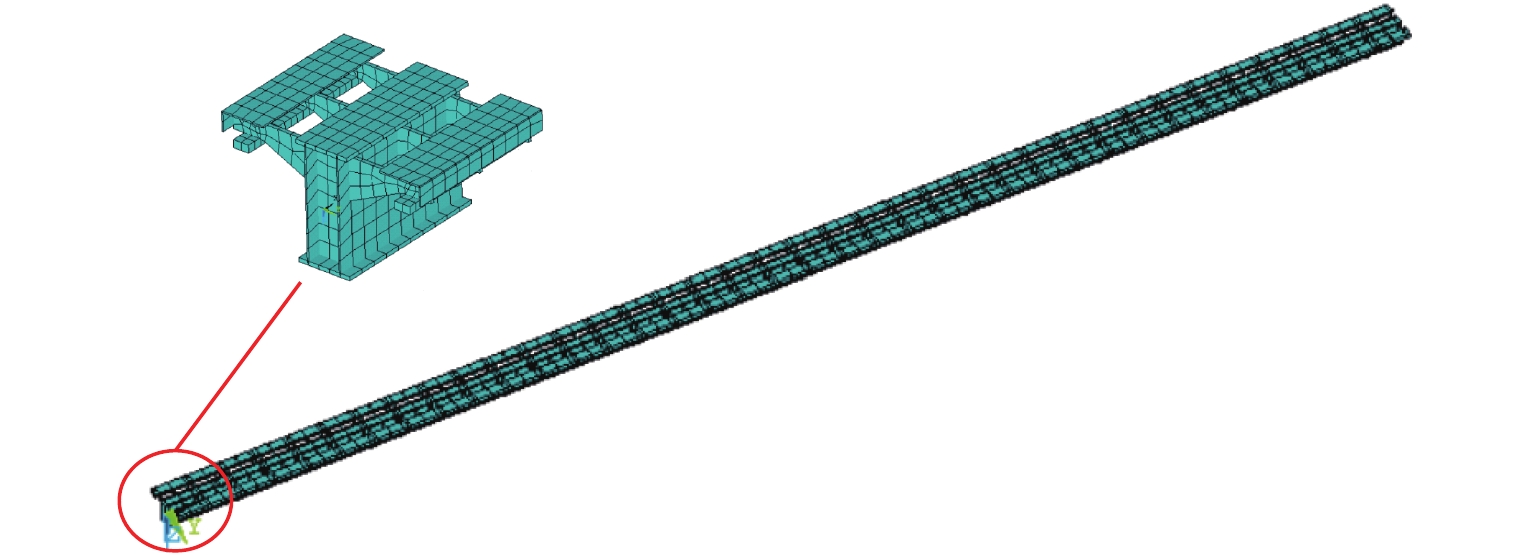
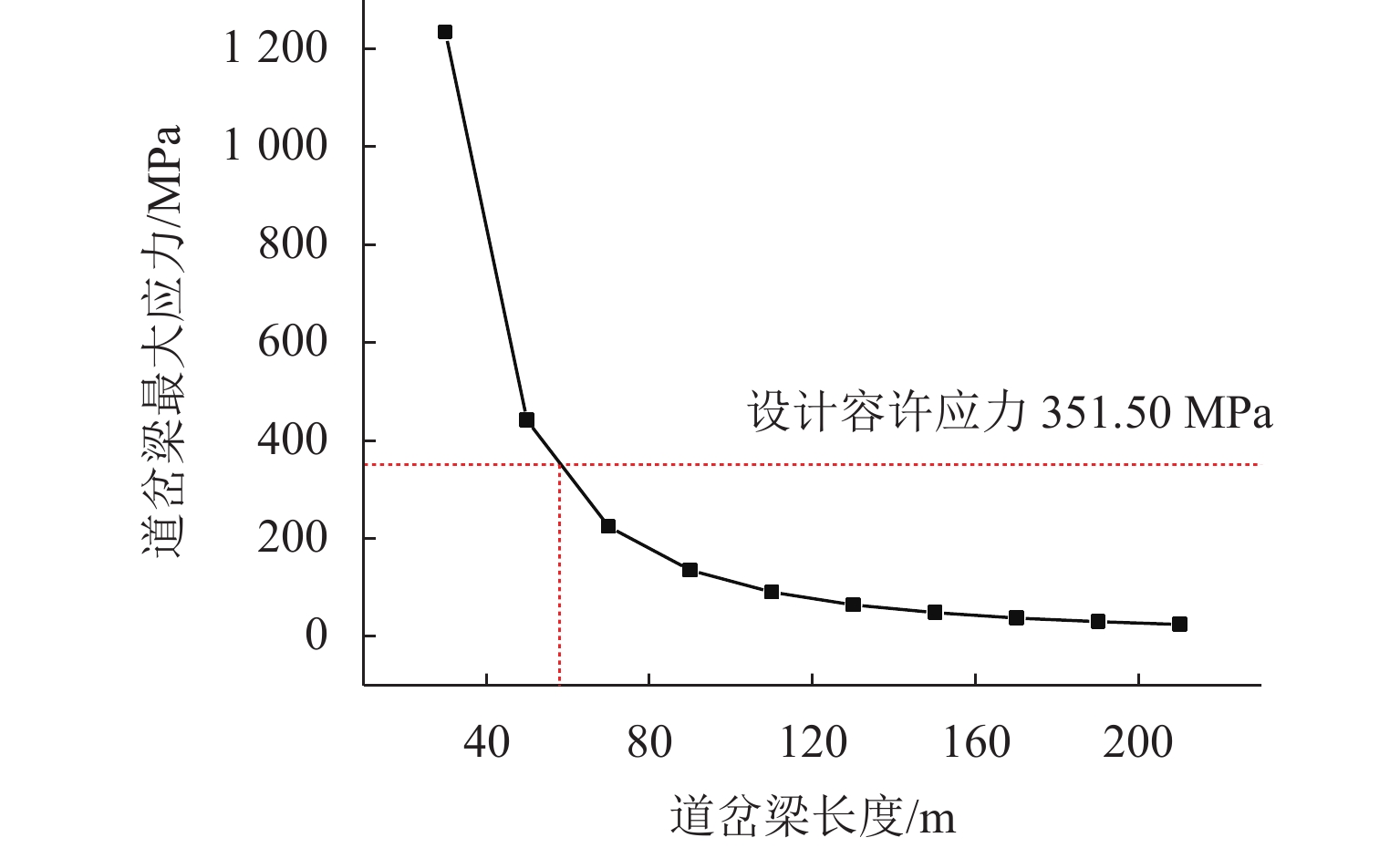
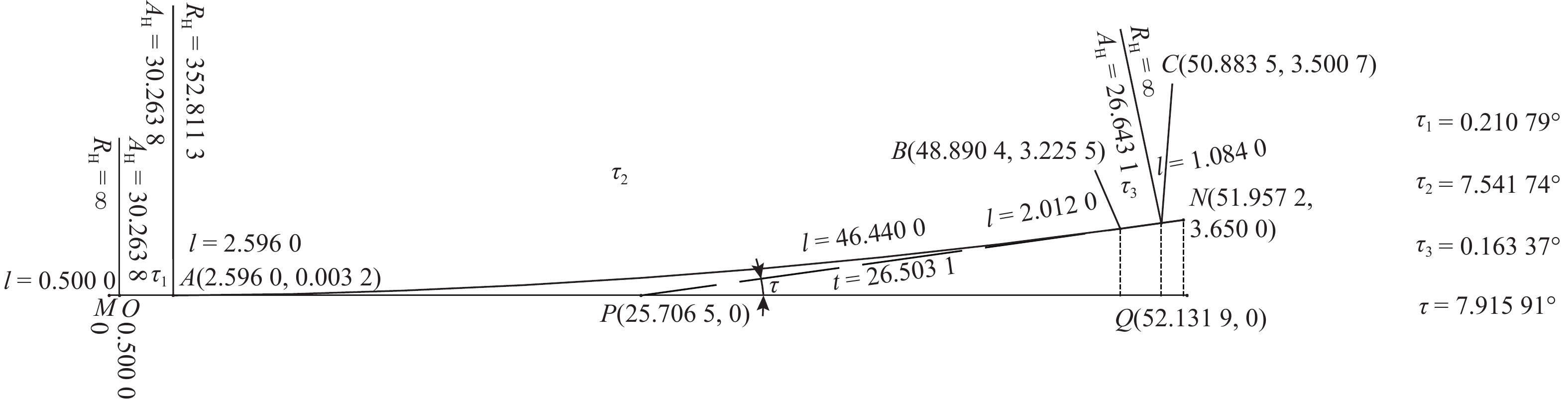
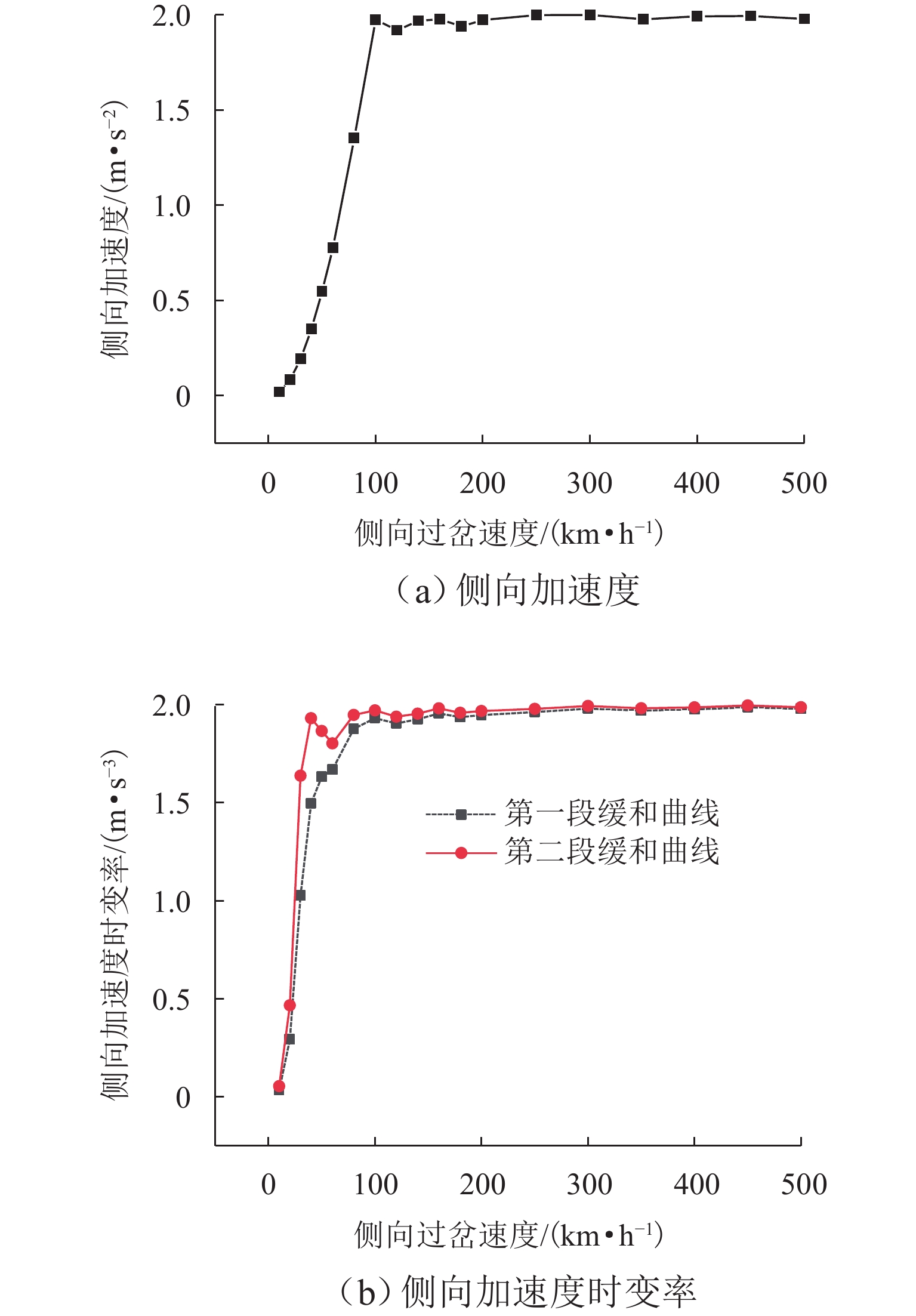
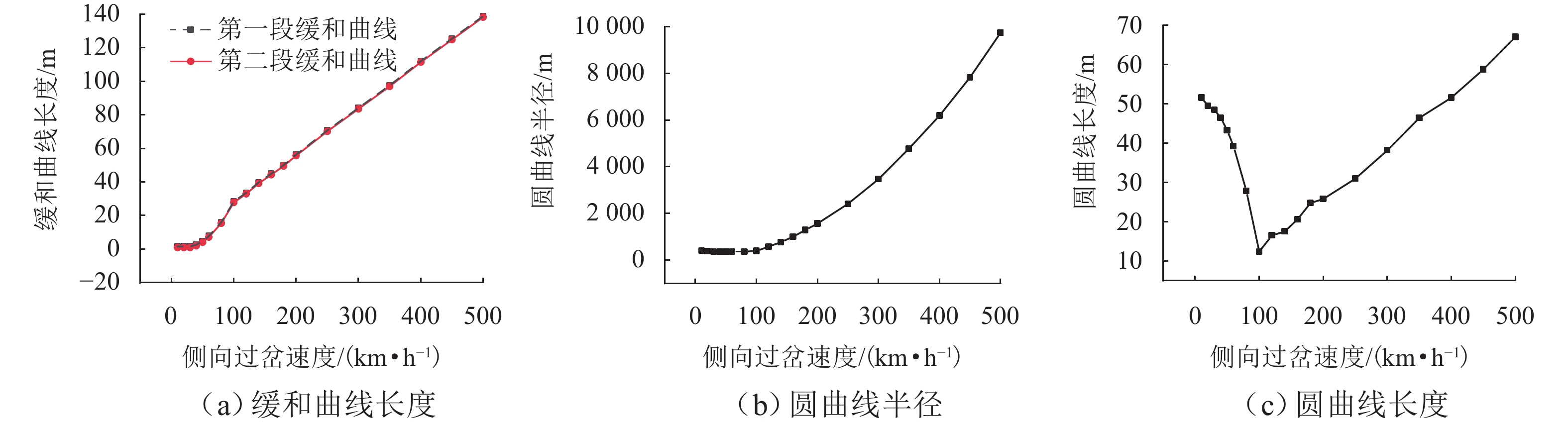
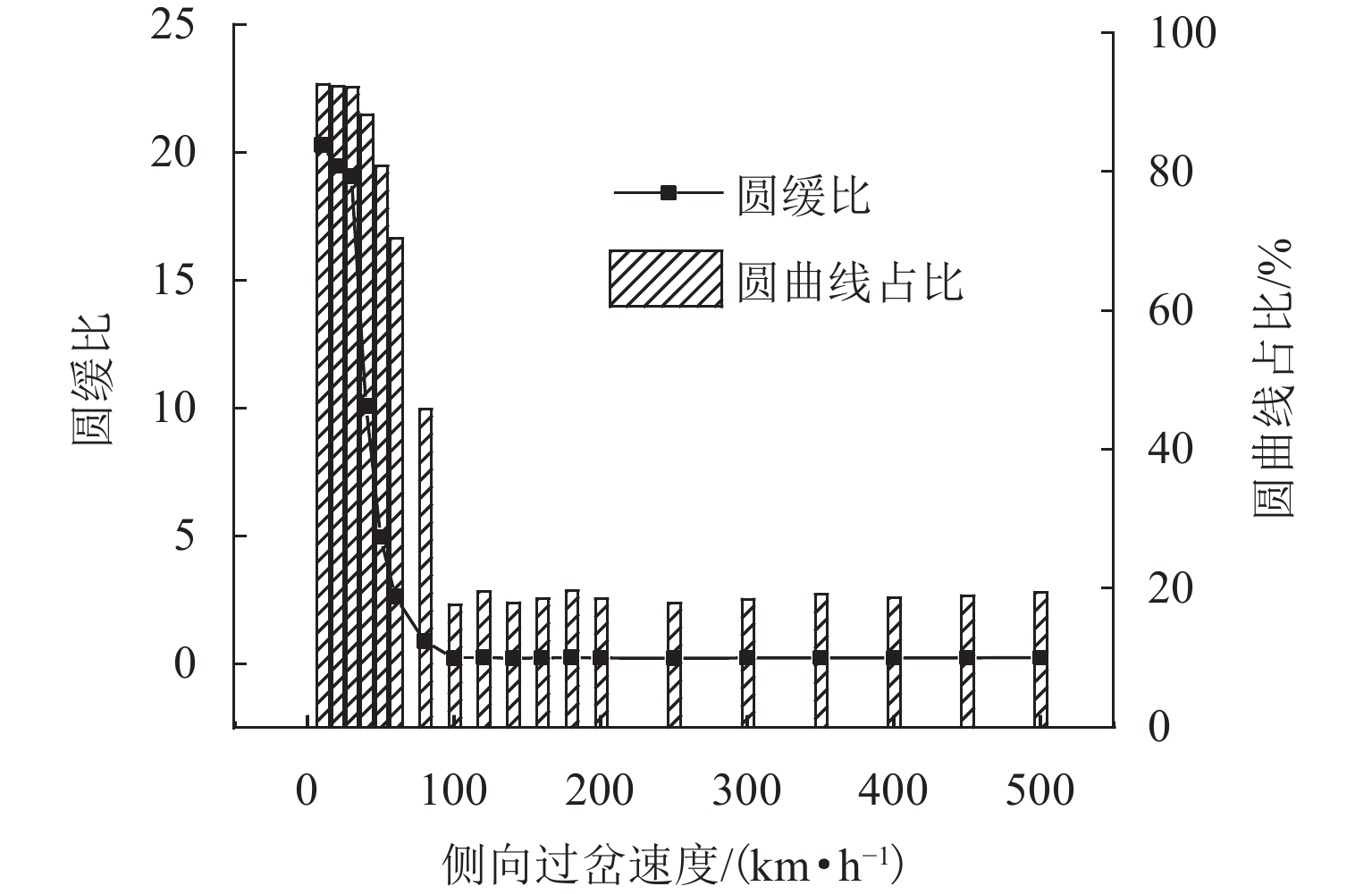
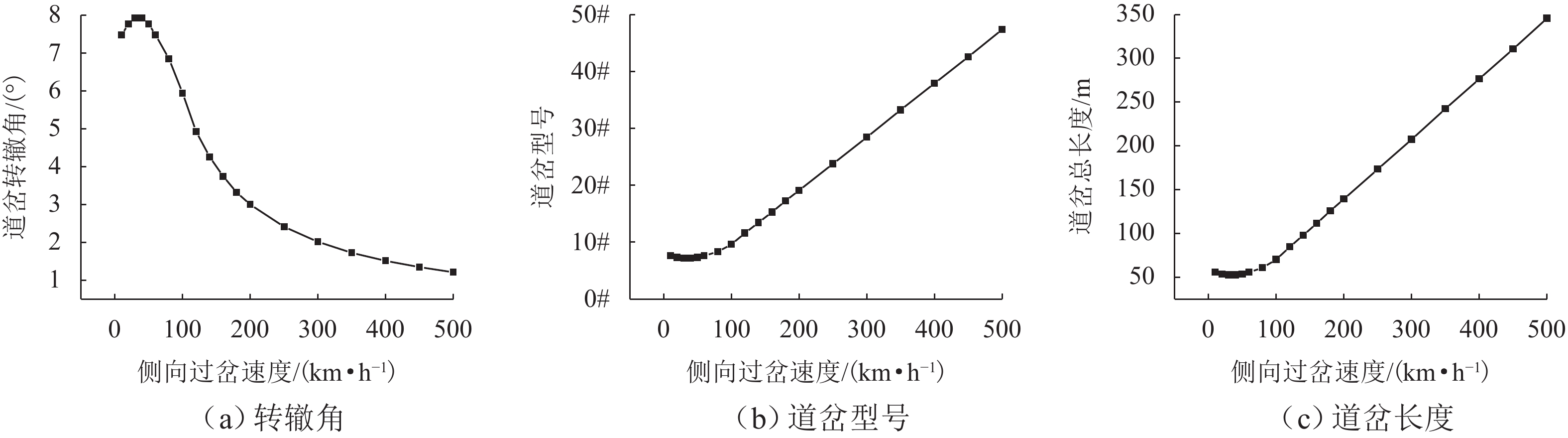
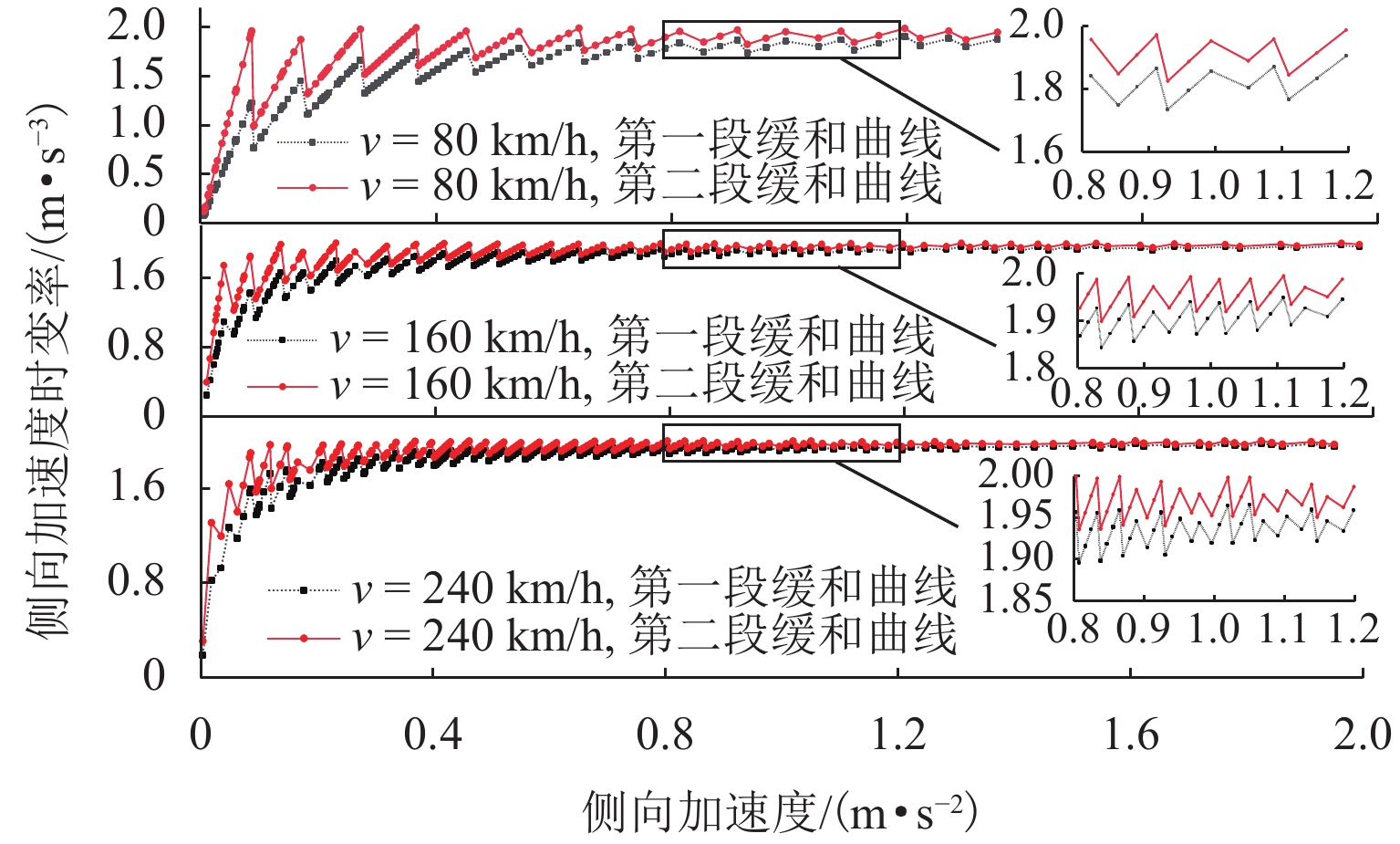
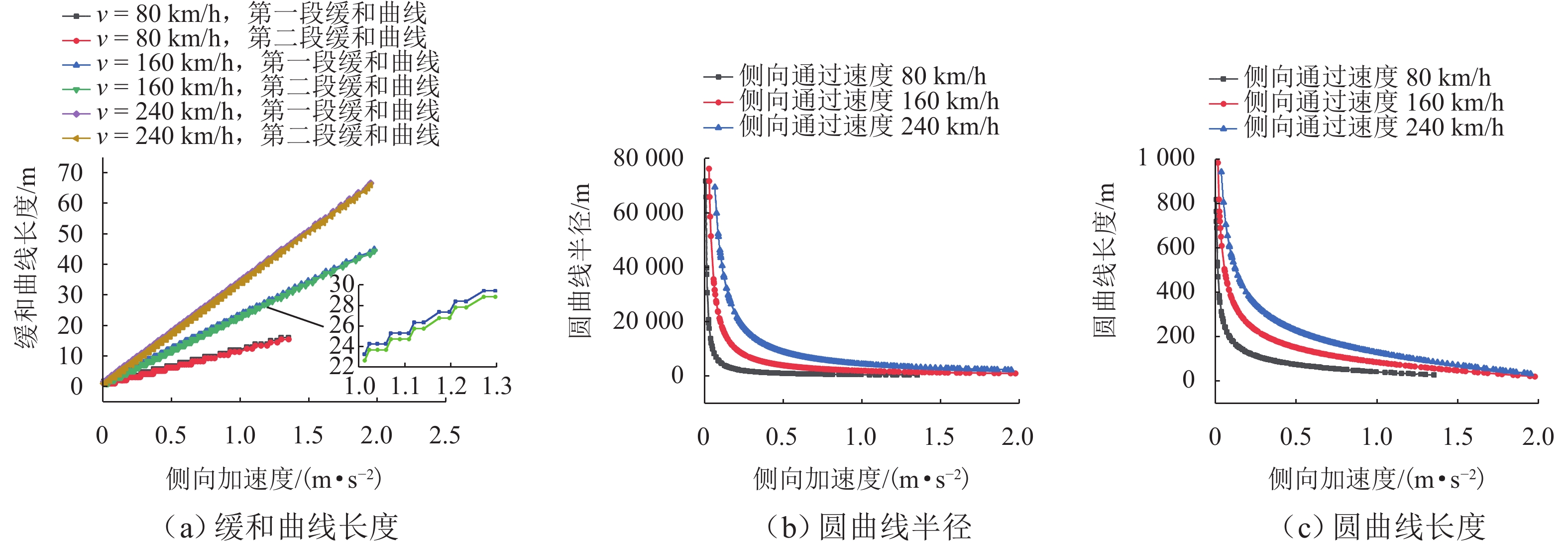
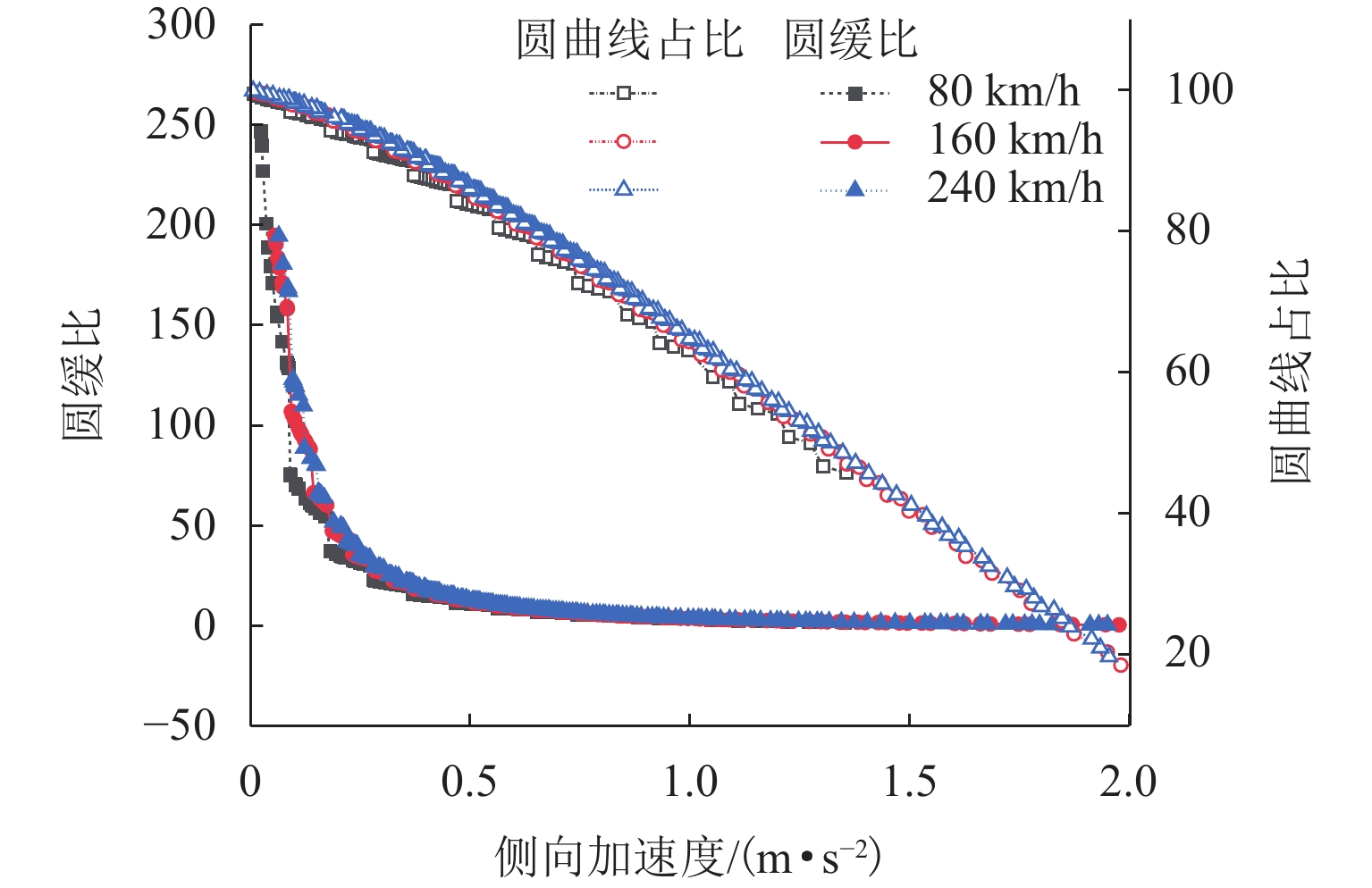
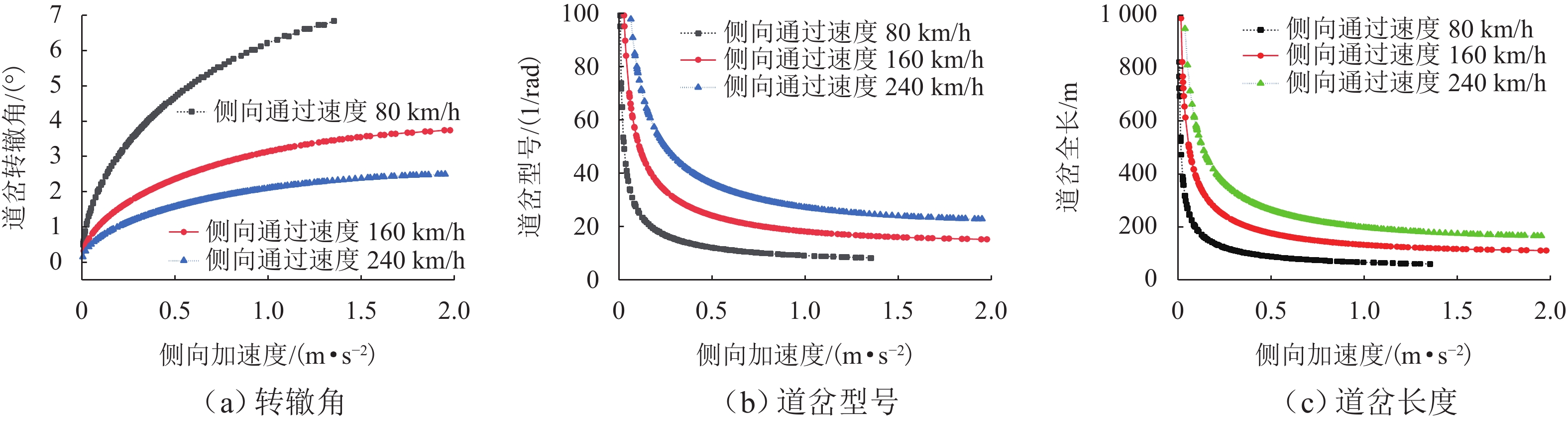
To address deficiencies of insufficient constraint consideration, single speed grade coverage, and unclear parameter influence mechanism in existing alignment design of flexible-bendable normal-conducting high-speed maglev turnouts, multi-dimensional constraint conditions for alignment design were clarified, and a “transition curve, circular curve, and transition curve” alignment design method integrating standard stator unit length constraints, vehicle construction constraints, and interface matching requirements was proposed. Finite element analysis models of turnout beams with different lengths were established. The mapping relationship between beam length and structural stress was quantified via nonlinear regression fitting, and the minimum theoretical turnout length was determined. Alignment designs for turnouts with different lateral passing speeds were performed to obtain alignment parameters for each speed grade. The influence laws of lateral passing speed and acceleration on alignment parameters were analyzed. Results show that maximum beam stress decreases nonlinearly with increasing length, and the length effect on stress weakens significantly beyond 90.00 m. With a safety factor of 1.3, the minimum theoretical length of the flexible-bendable turnout is 56.76 m. When lateral passing speed does not exceed 50 km/h, or the turnout number is less than 7.500#, a single circular alignment is recommended. The “transition, circular, and transition” alignment is particularly suitable for medium-to-high-speed scenarios above 70 km/h. When lateral passing speed does not exceed 80 km/h, vehicle construction radius constraint is dominant, exhibiting “short transition, small radius, long circular curve, and small turnout number” characteristics. When speed exceeds 100 km/h, centrifugal force balancing is the core requirement, forming a structure with “long transition, large radius, short circular curve, and large turnout number” characteristics, with circular curve proportion decreasing significantly and transition curve gradually becoming dominant. With increasing lateral acceleration, transition curve length increases, while circular curve radius, circular-transition ratio, and total turnout length decrease. When acceleration exceeds 1.000 m/s2, turnout alignment parameter changes tend to be gradual.
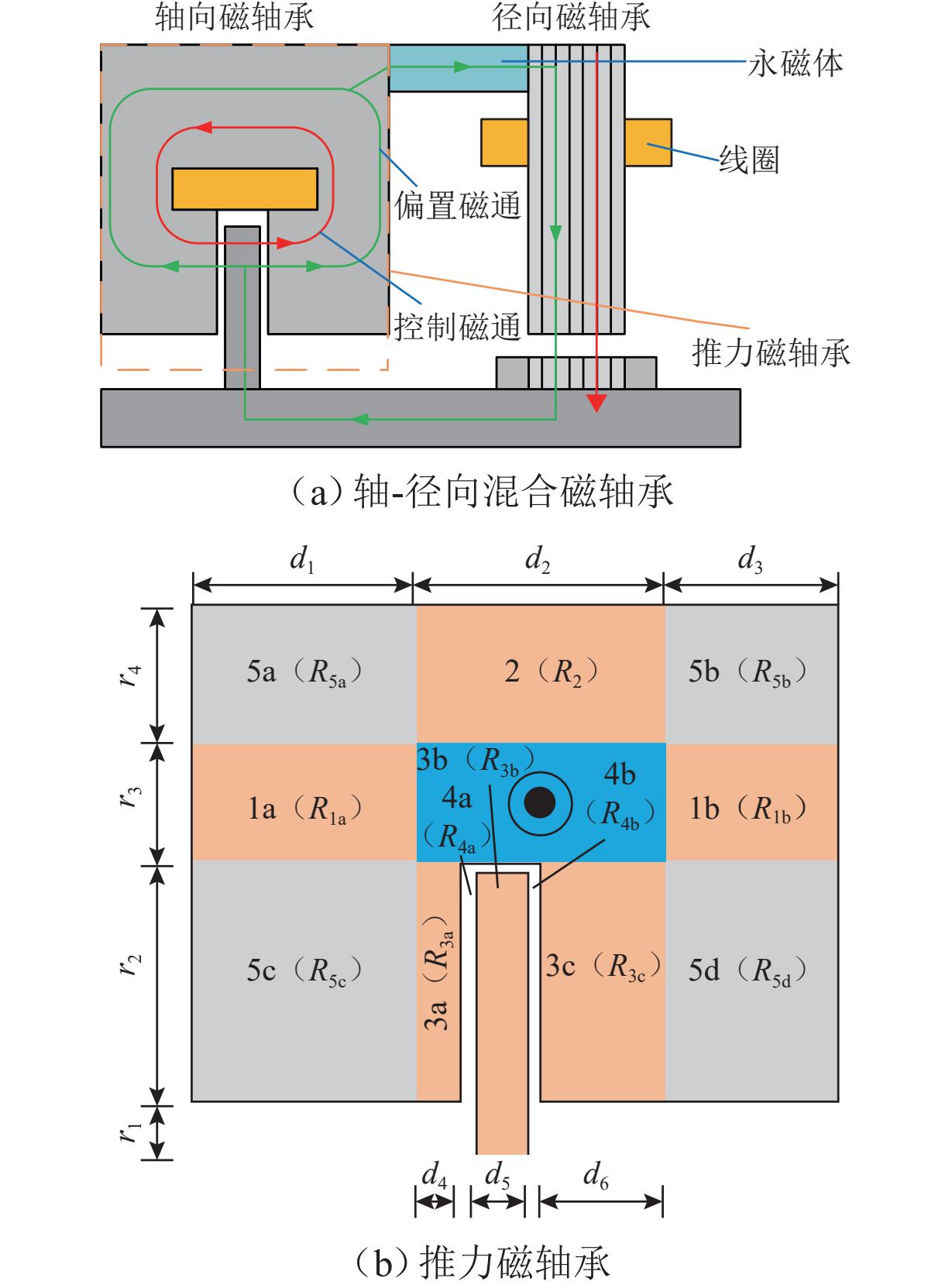
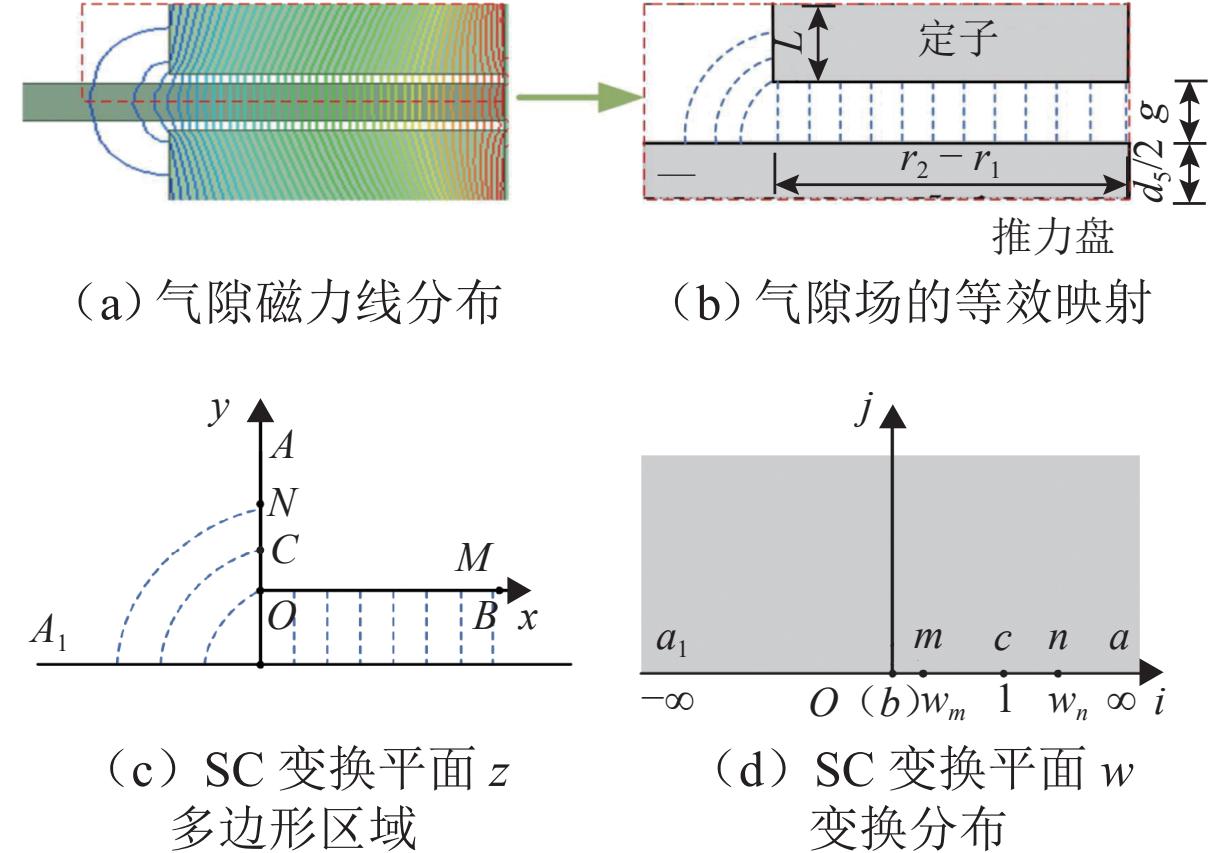
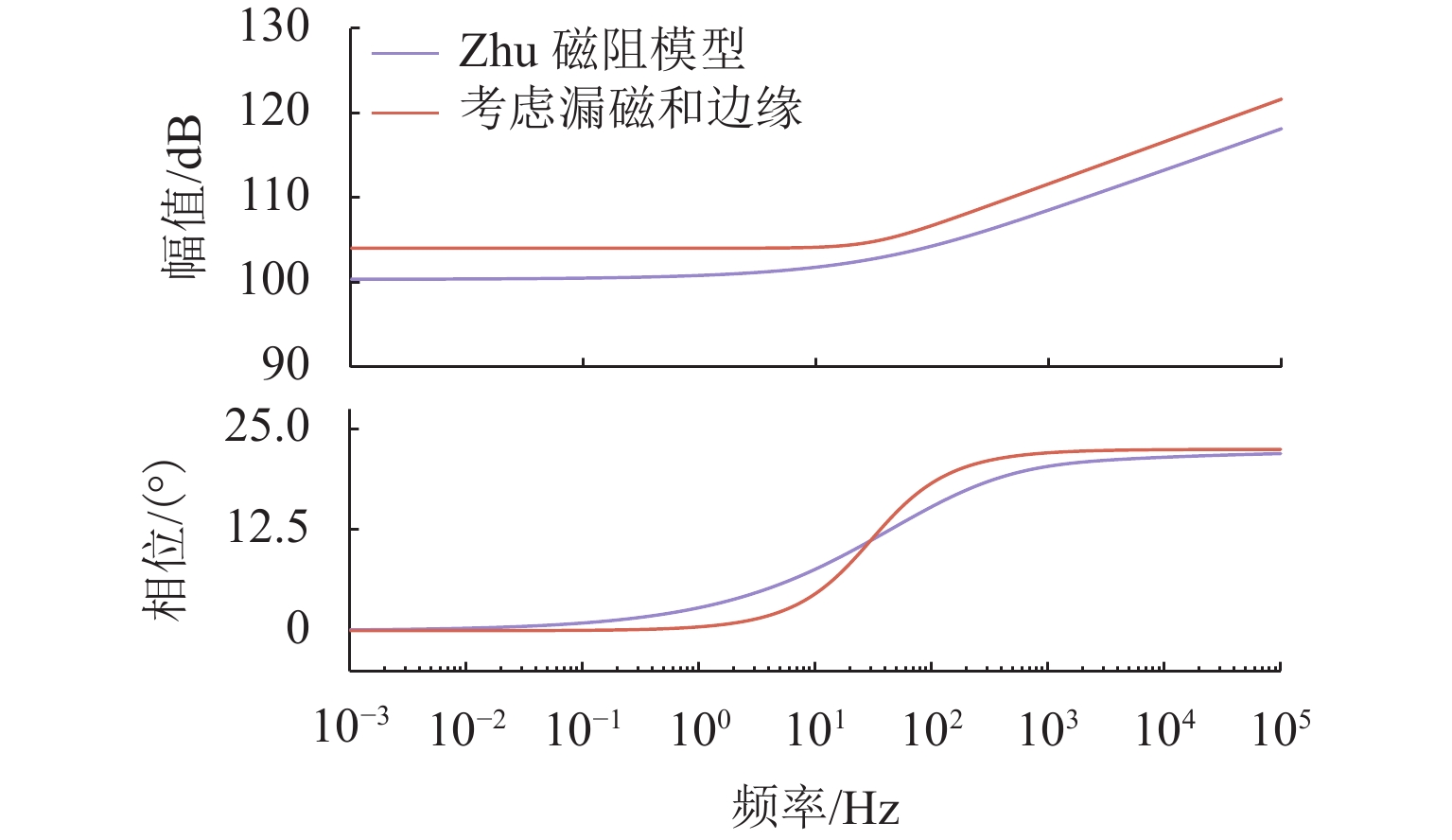
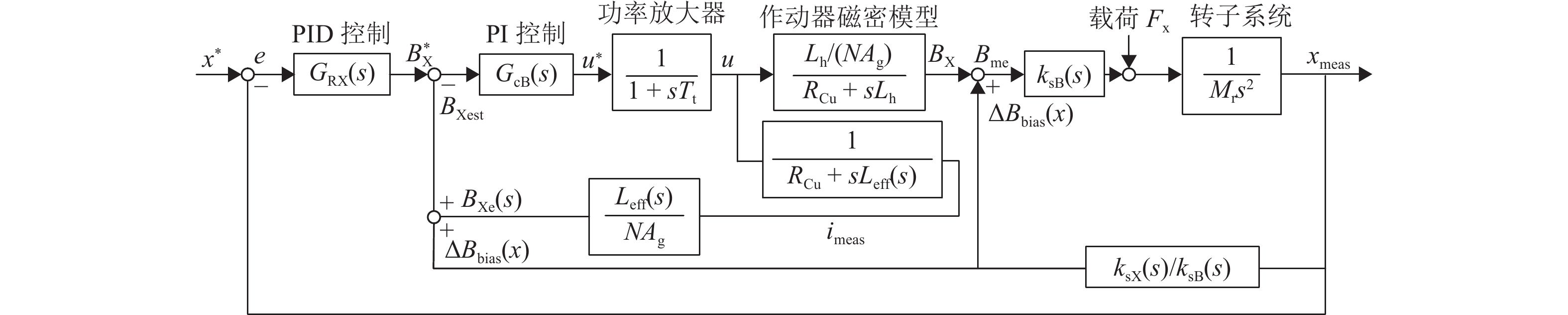
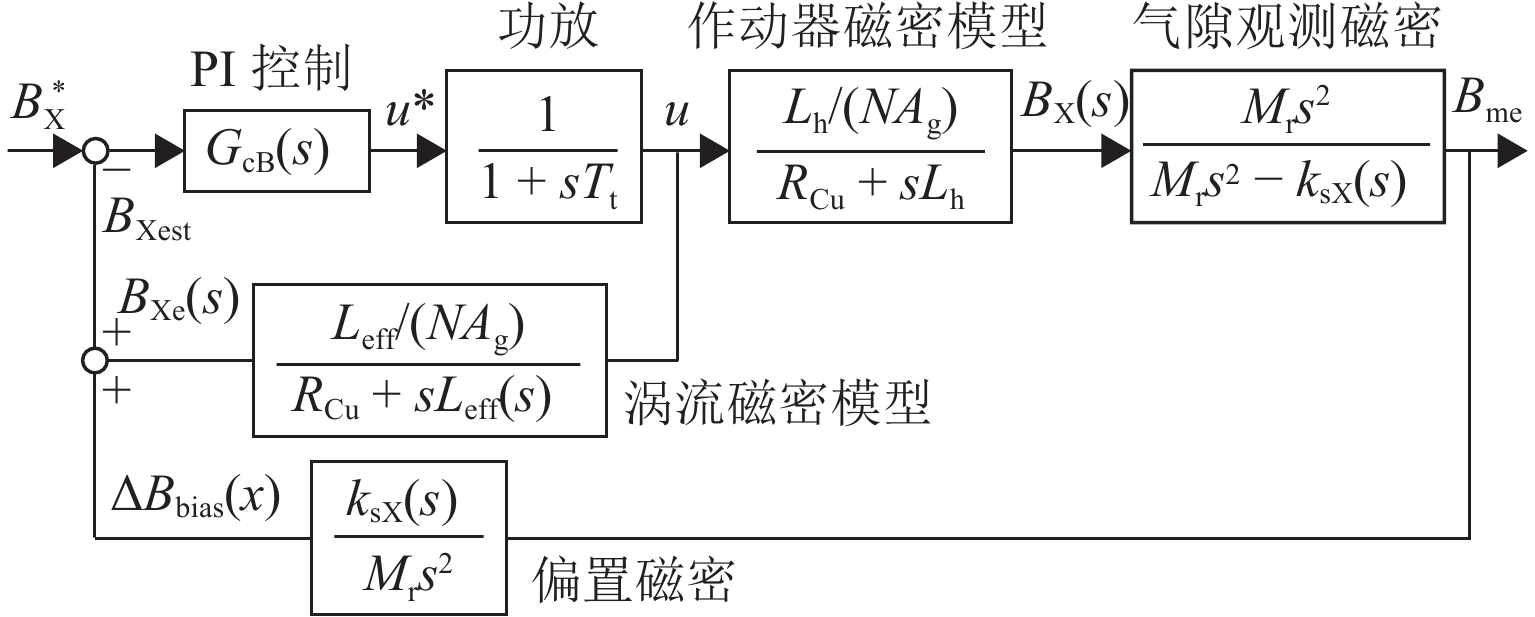
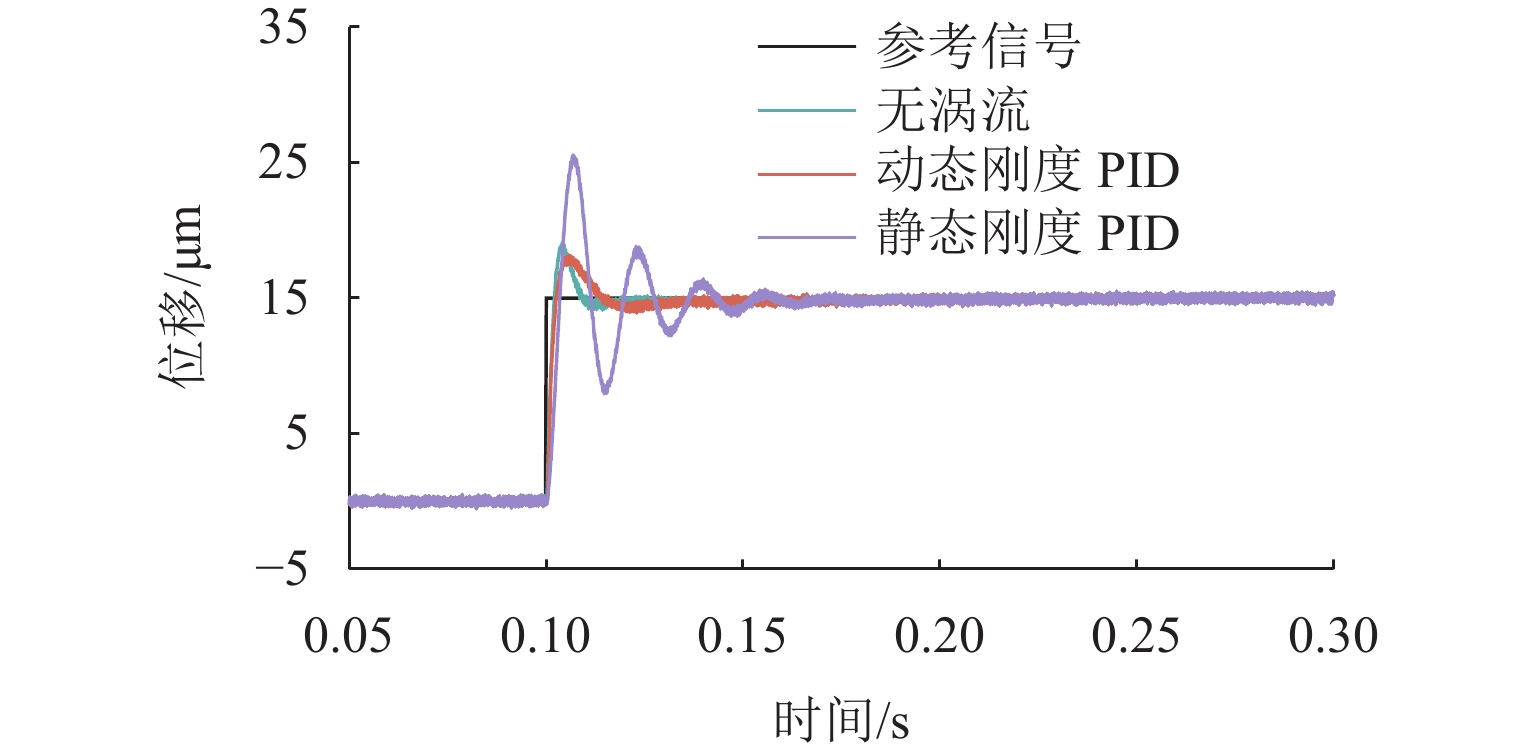
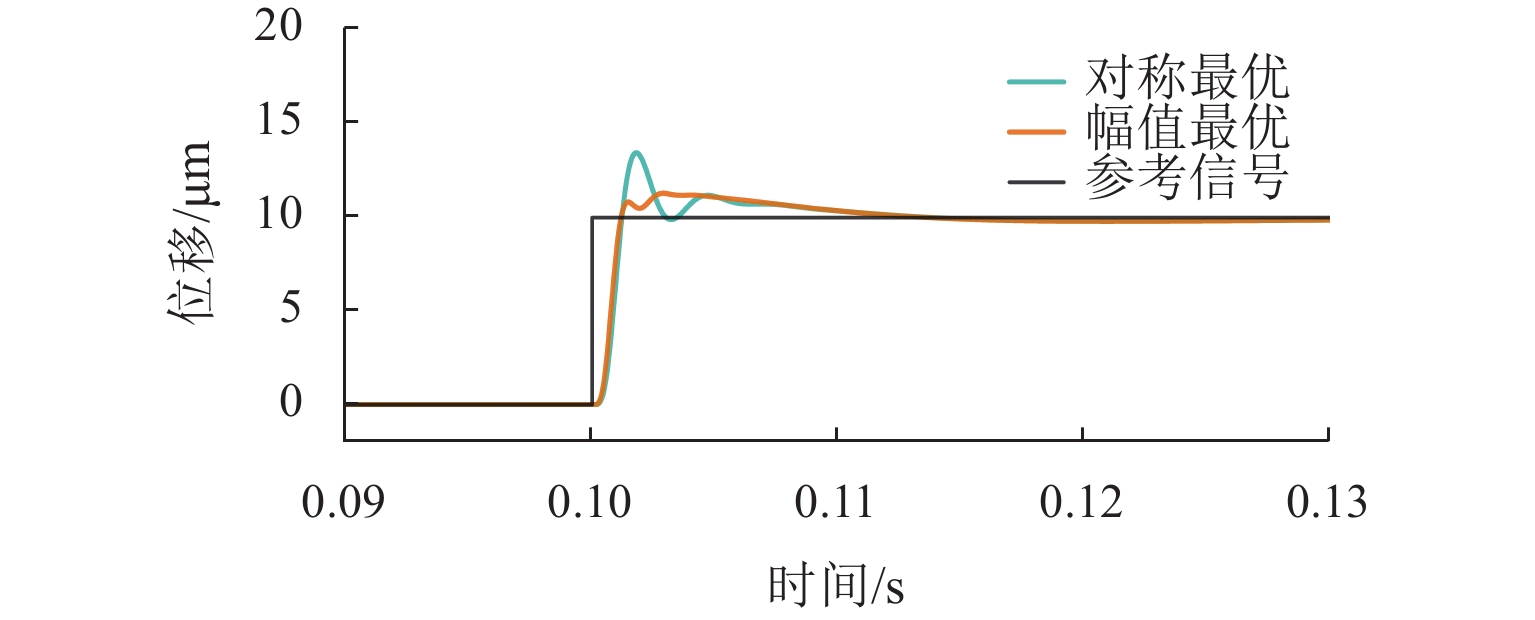
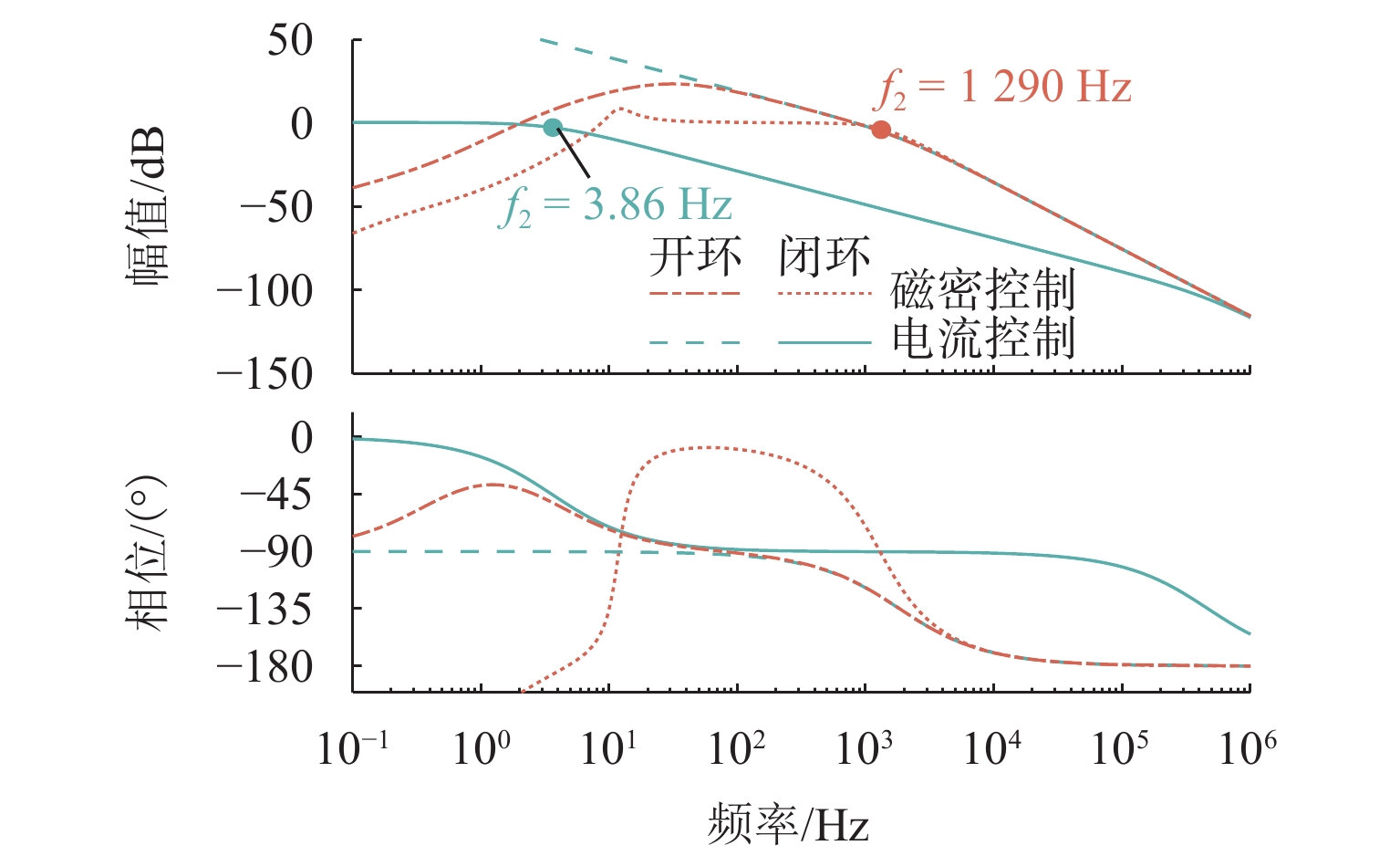
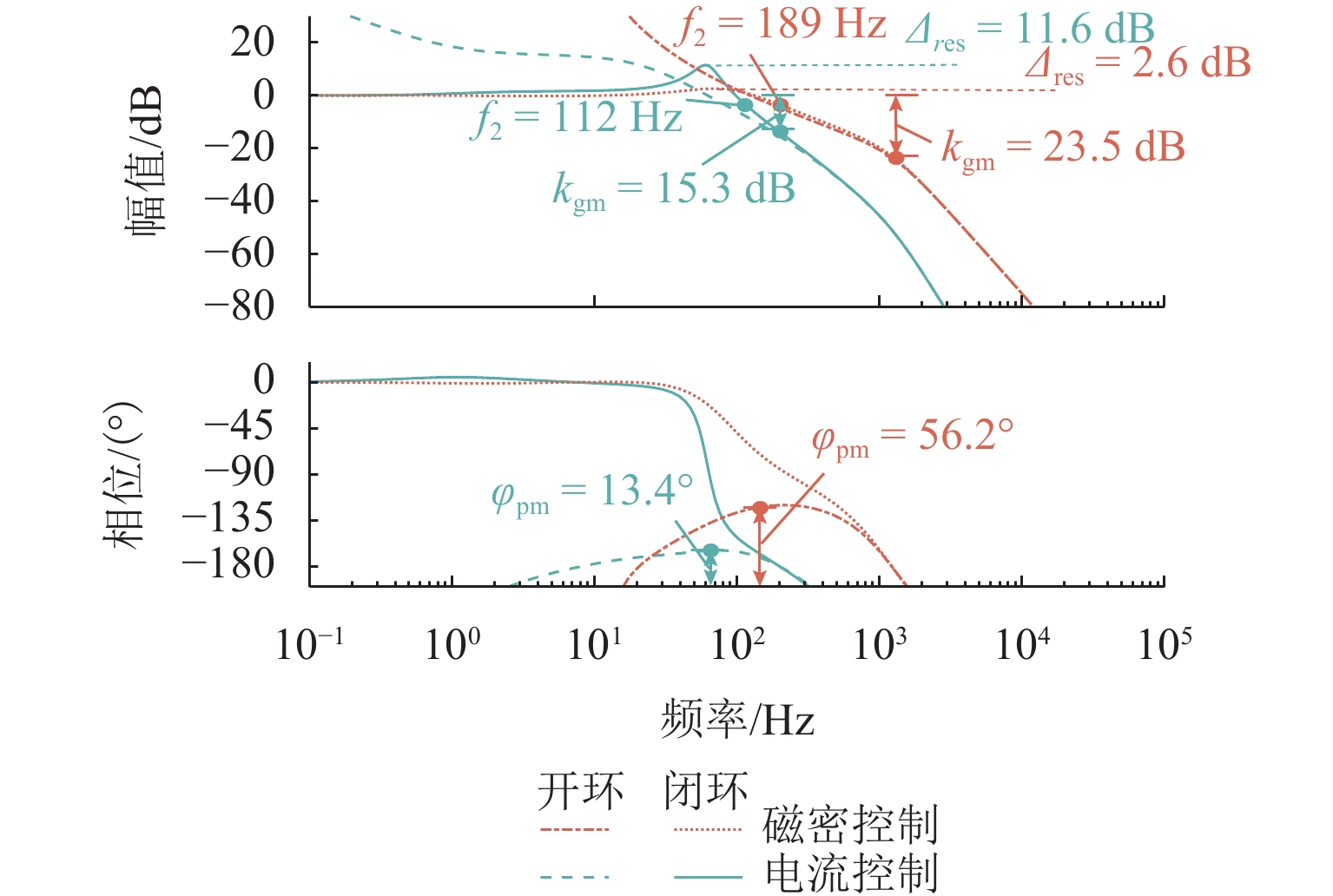
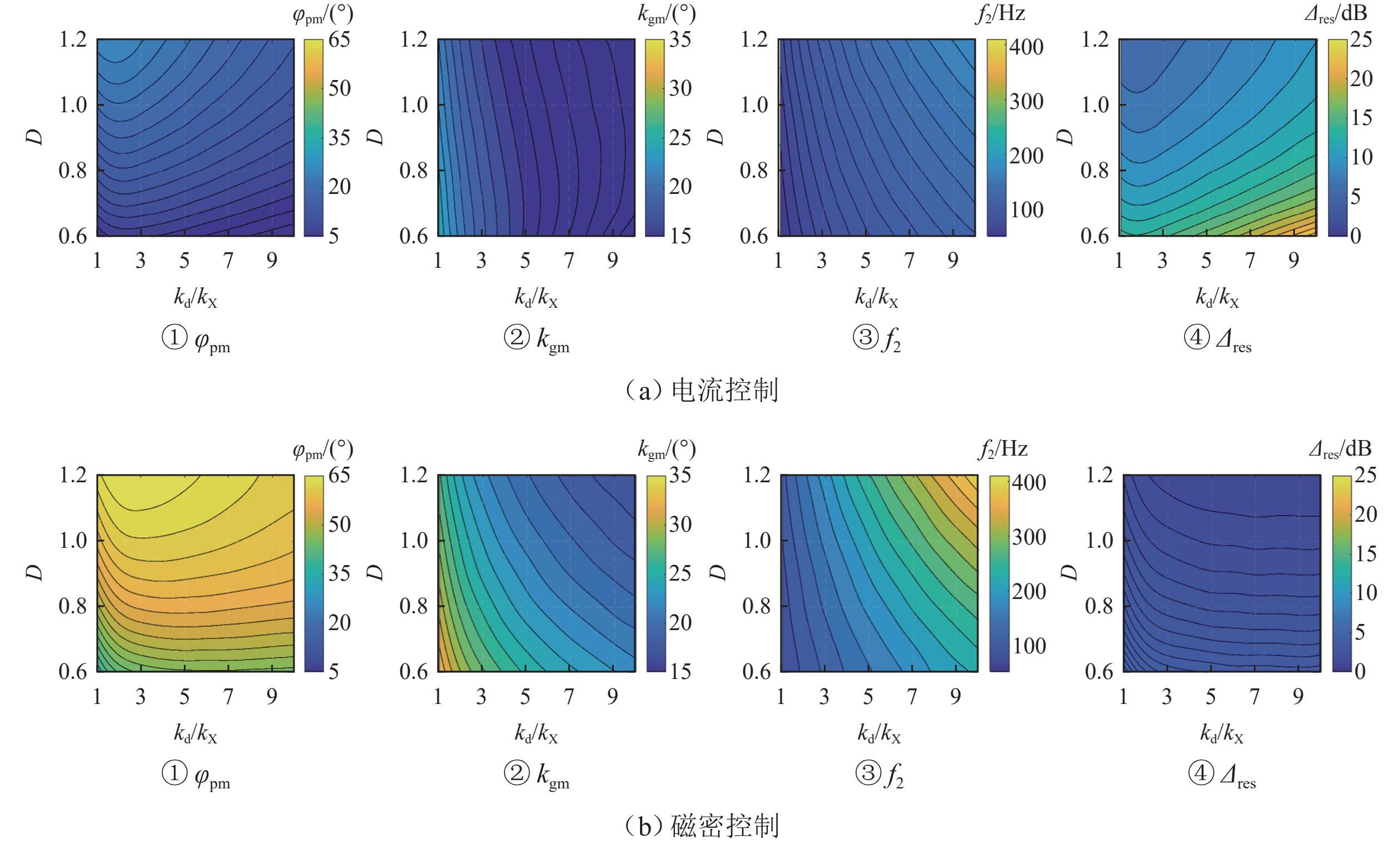
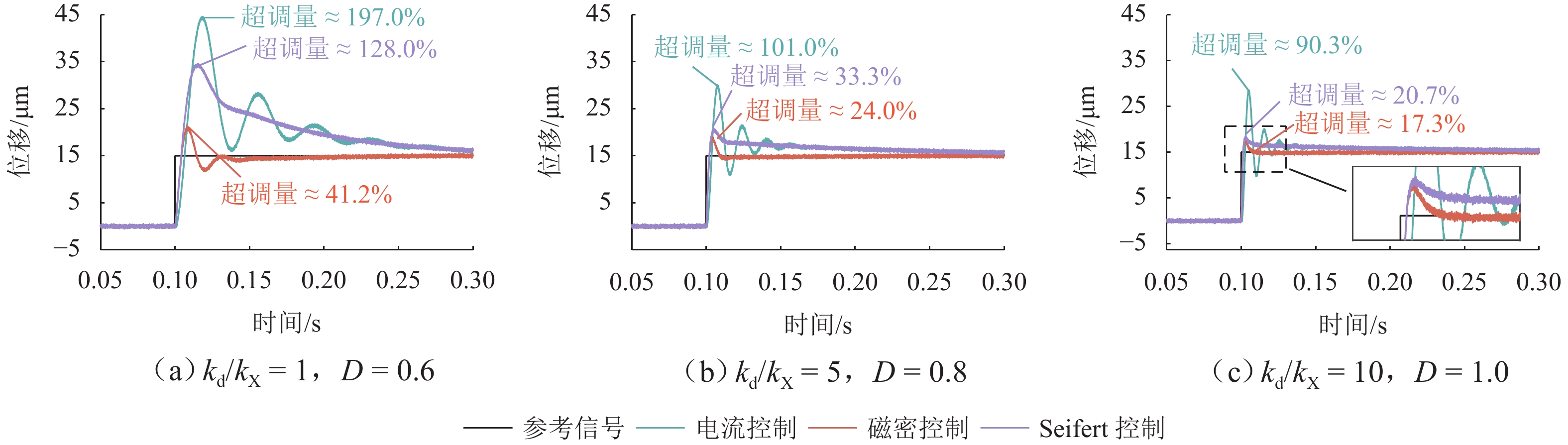
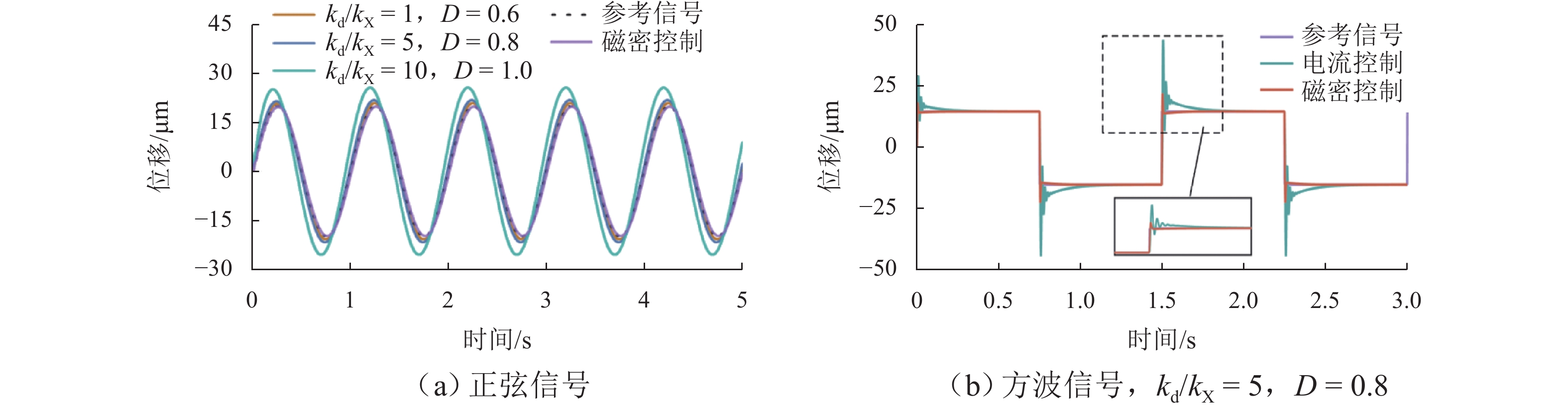
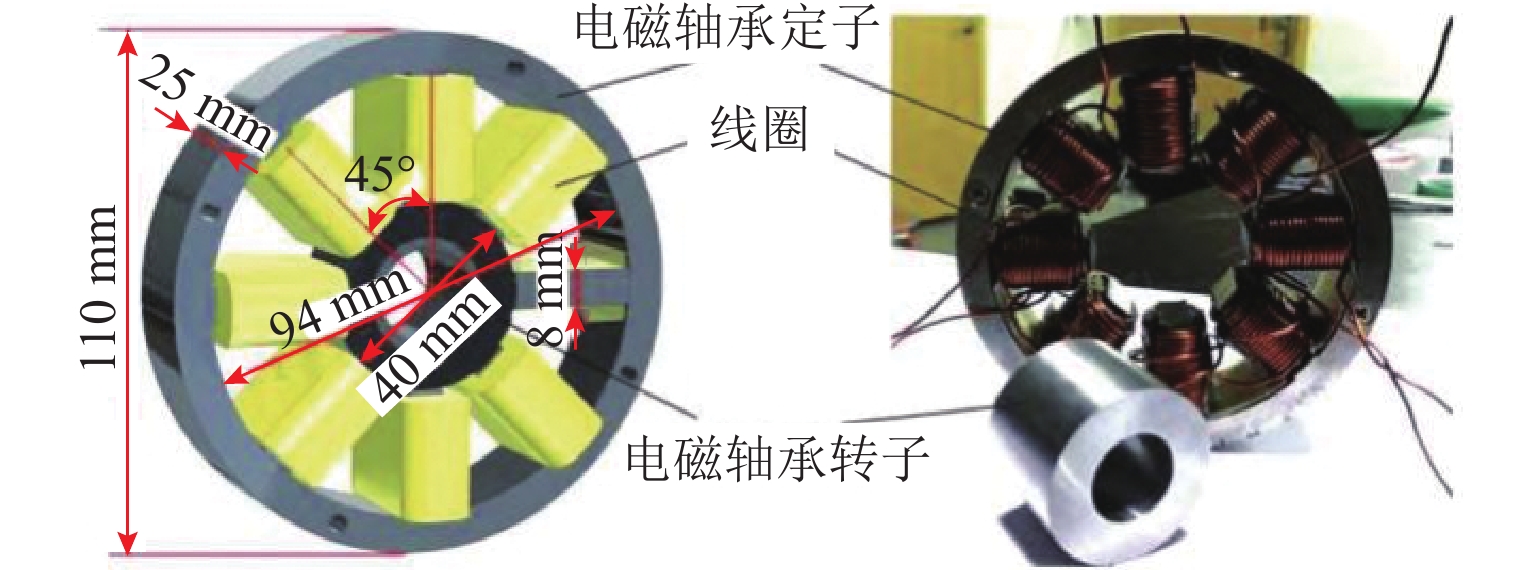
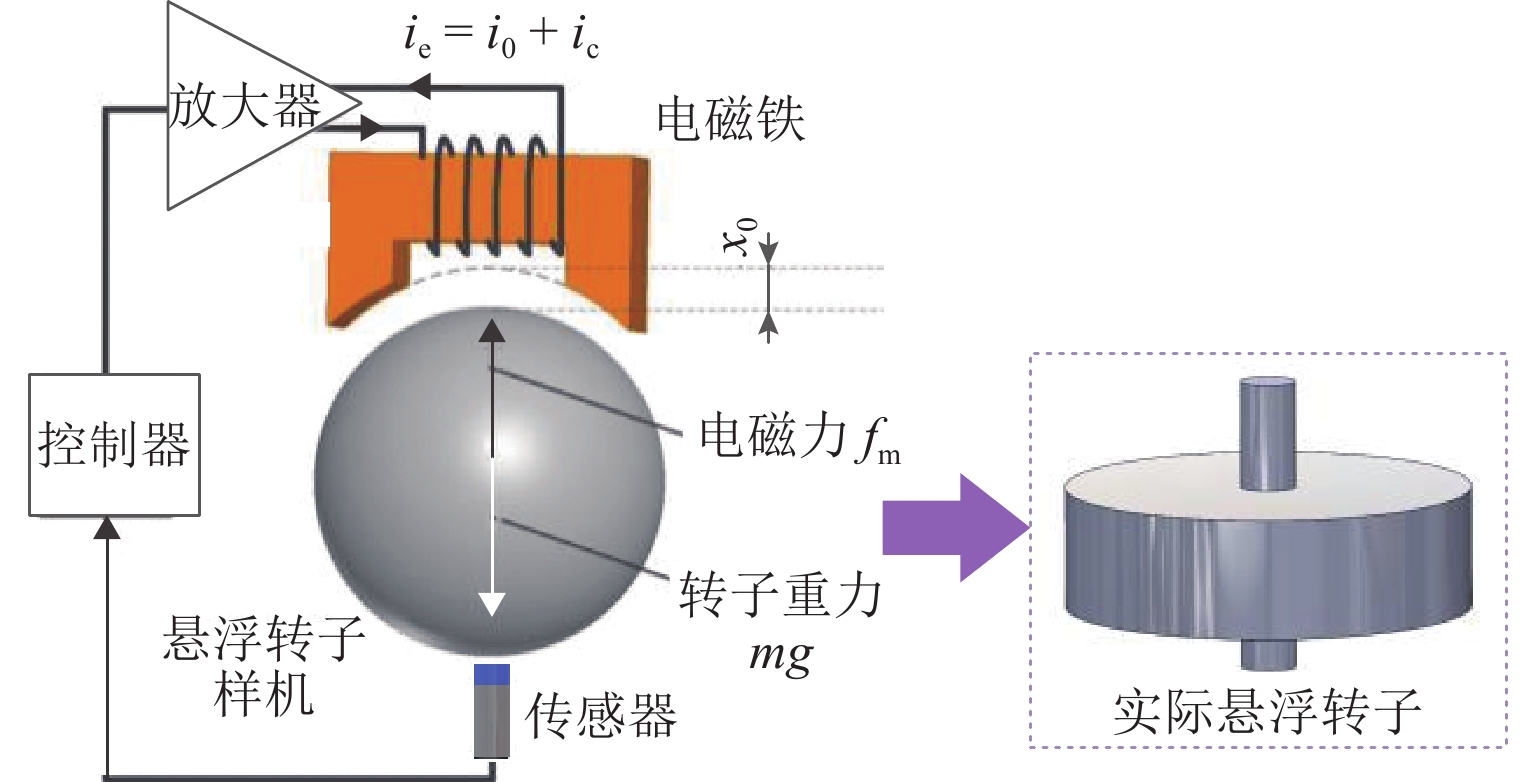
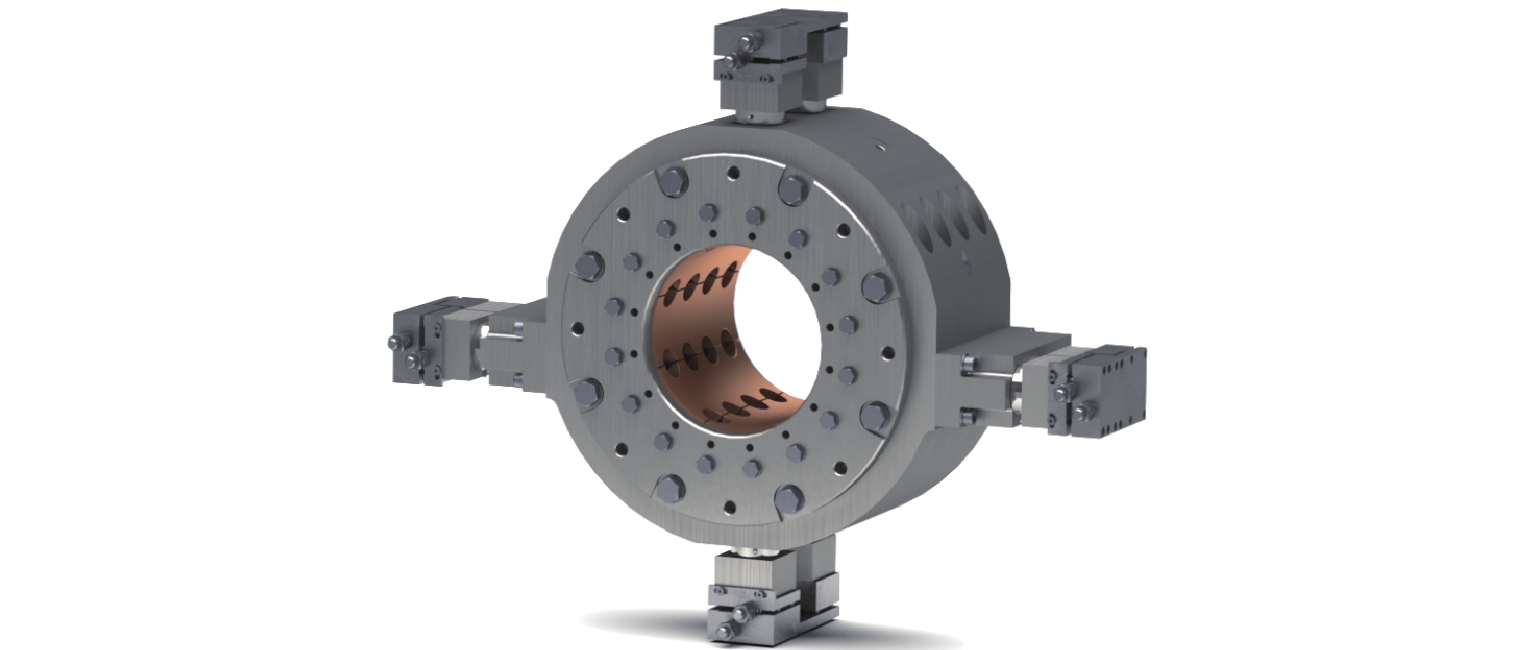
High-precision control of electromagnetic thrust bearings can enhance the coordination and stability of sorting robotic arms or auxiliary joints in collaborative robots. Flux density feedback control under cascaded control systems is recognized as an effective solution for high-frequency applications; however, there are currently few suitable miniature Hall sensors capable of accurately capturing the real-time magnetic flux density of the air gap. To address the problem of insufficient accuracy in traditional flux density estimation under high-frequency operating conditions, first, a rational approximation of an equivalent reluctance model considering eddy current, magnetic leakage, and edge effects was performed. Secondly, based on the coupled stiffness and an eddy current compensation model incorporating effective inductance, a flux density observer using measurable displacement and current as joint input signals was designed. In the outer loop, a PID controller considering dynamic stiffness was designed to compensate for flux density hysteresis, and the internal flux density control loop was reconstructed. Finally, a cascaded displacement-flux density control loop for the electromagnetic thrust bearing was established and validated. The results indicate that compared to the current control strategy, the flux density feedback control method can increase the gain margin of the electromagnetic thrust bearing system to 35 dB, maintain the phase margin above 50°, and extend the control bandwidth to 400 Hz. When the current control becomes unstable, the flux density feedback control can suppress the overshoot to below 41.2%, and it demonstrates a smaller overshoot and a faster settling speed in step responses under different parameters and square-wave tracking tests.
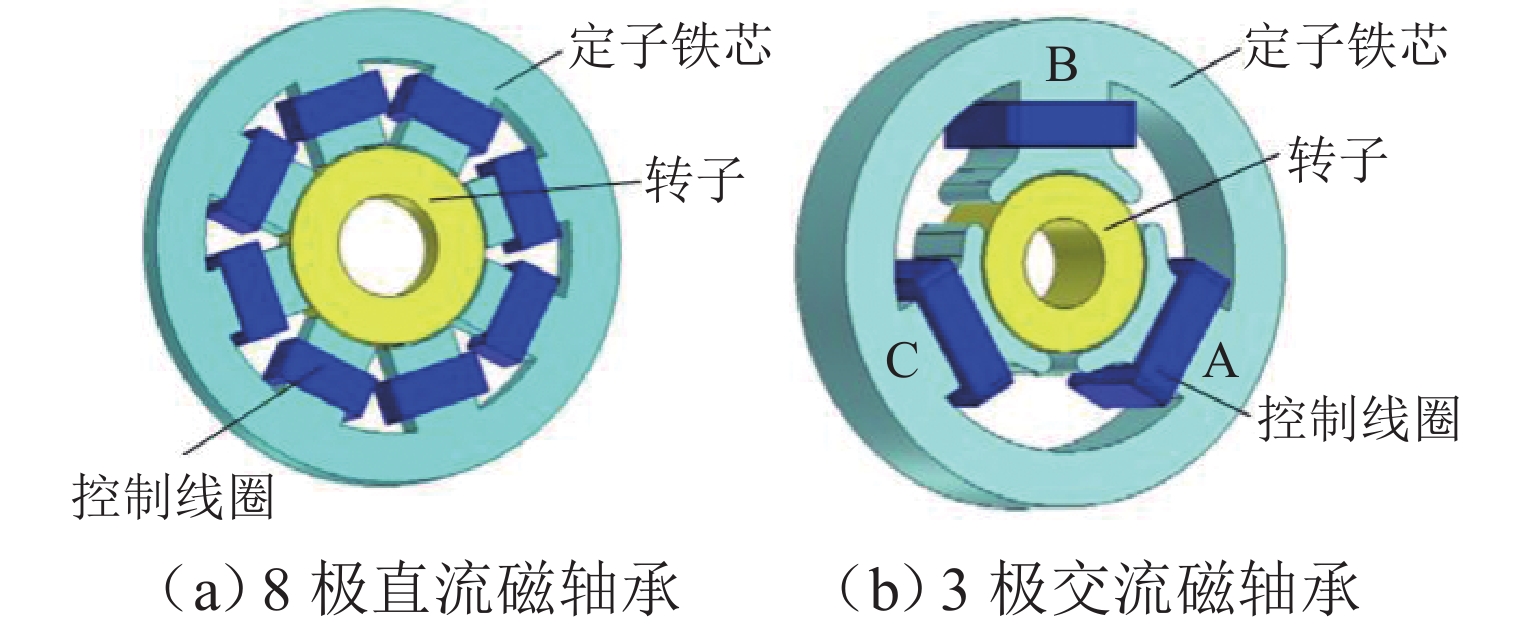
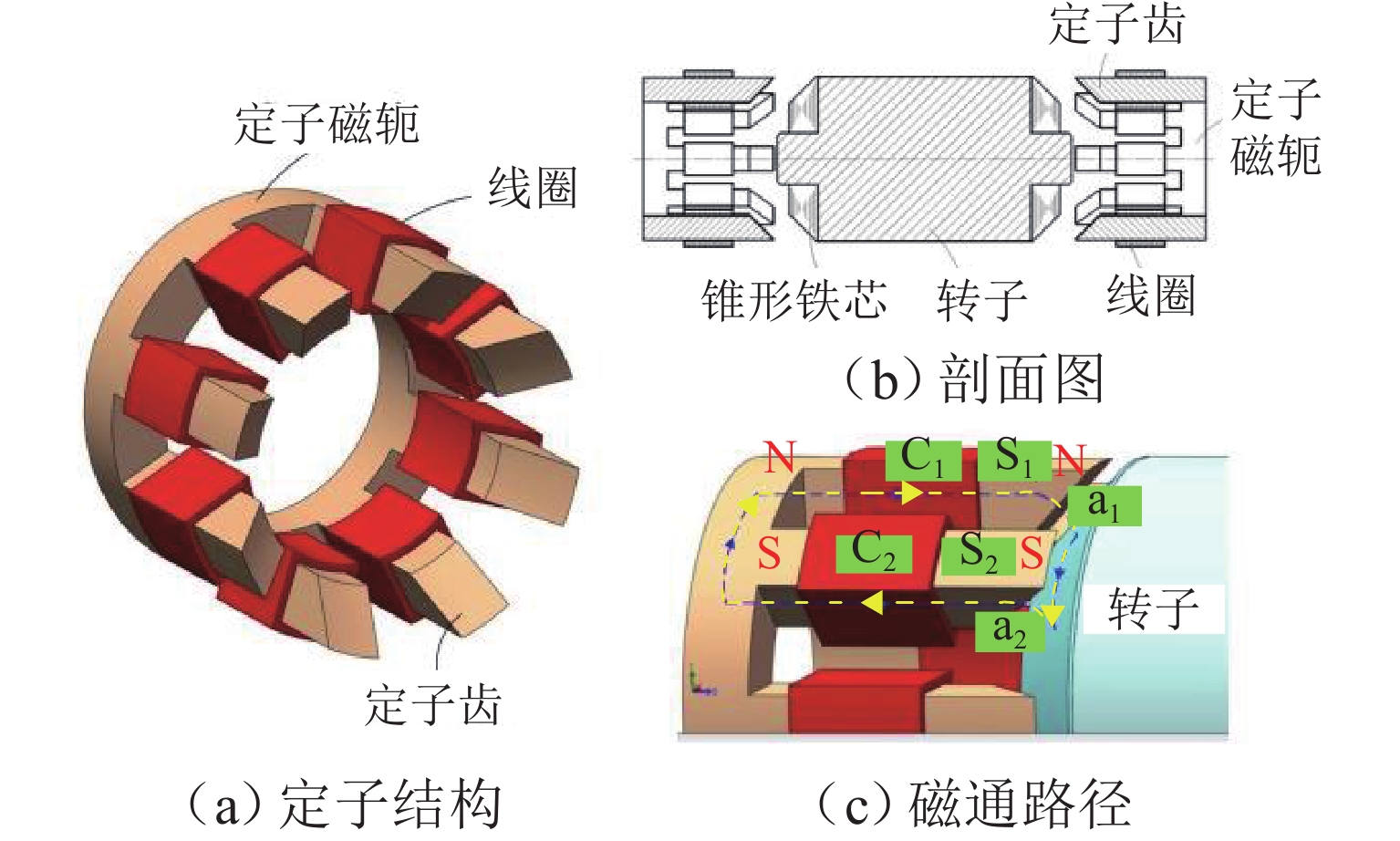
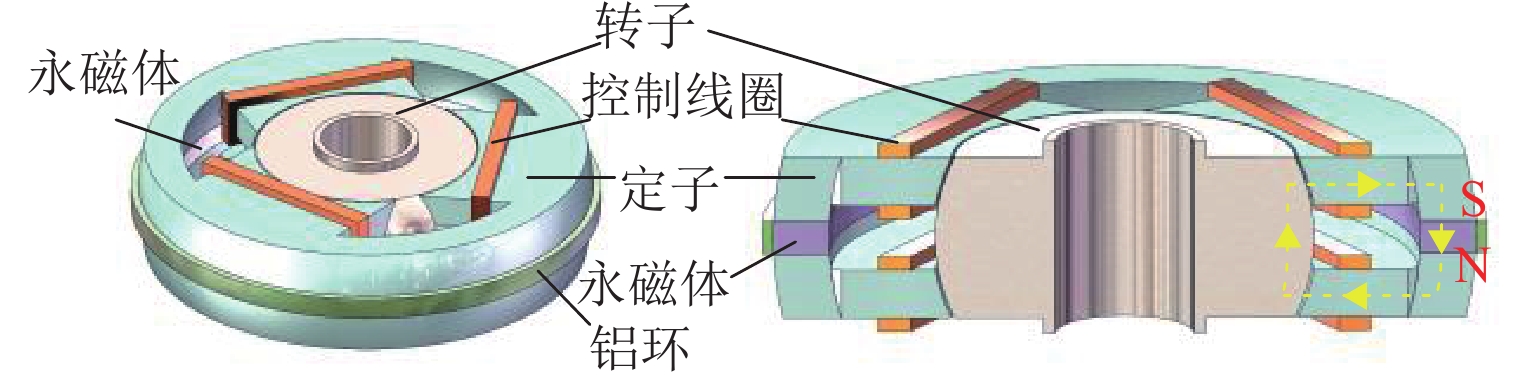
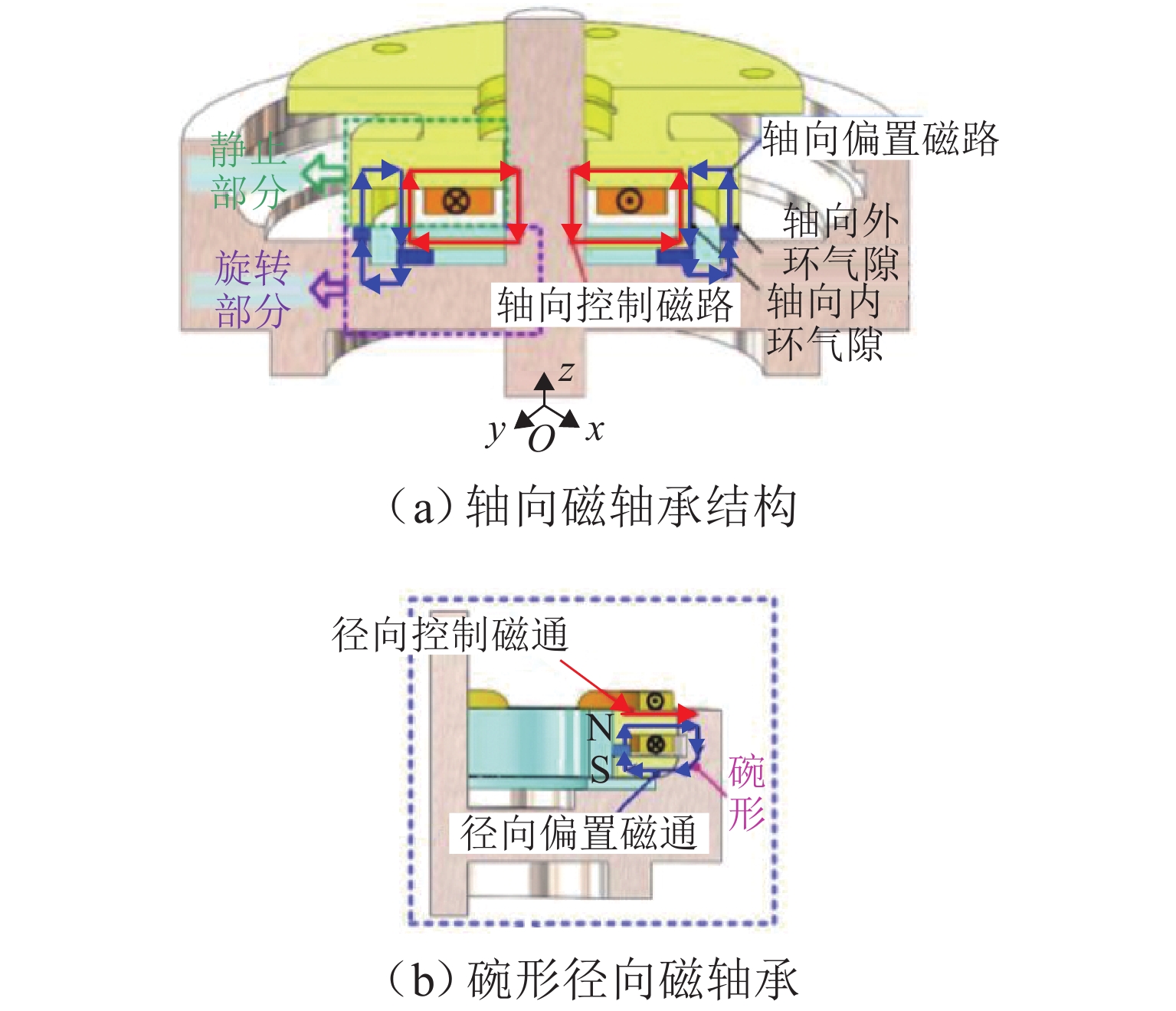
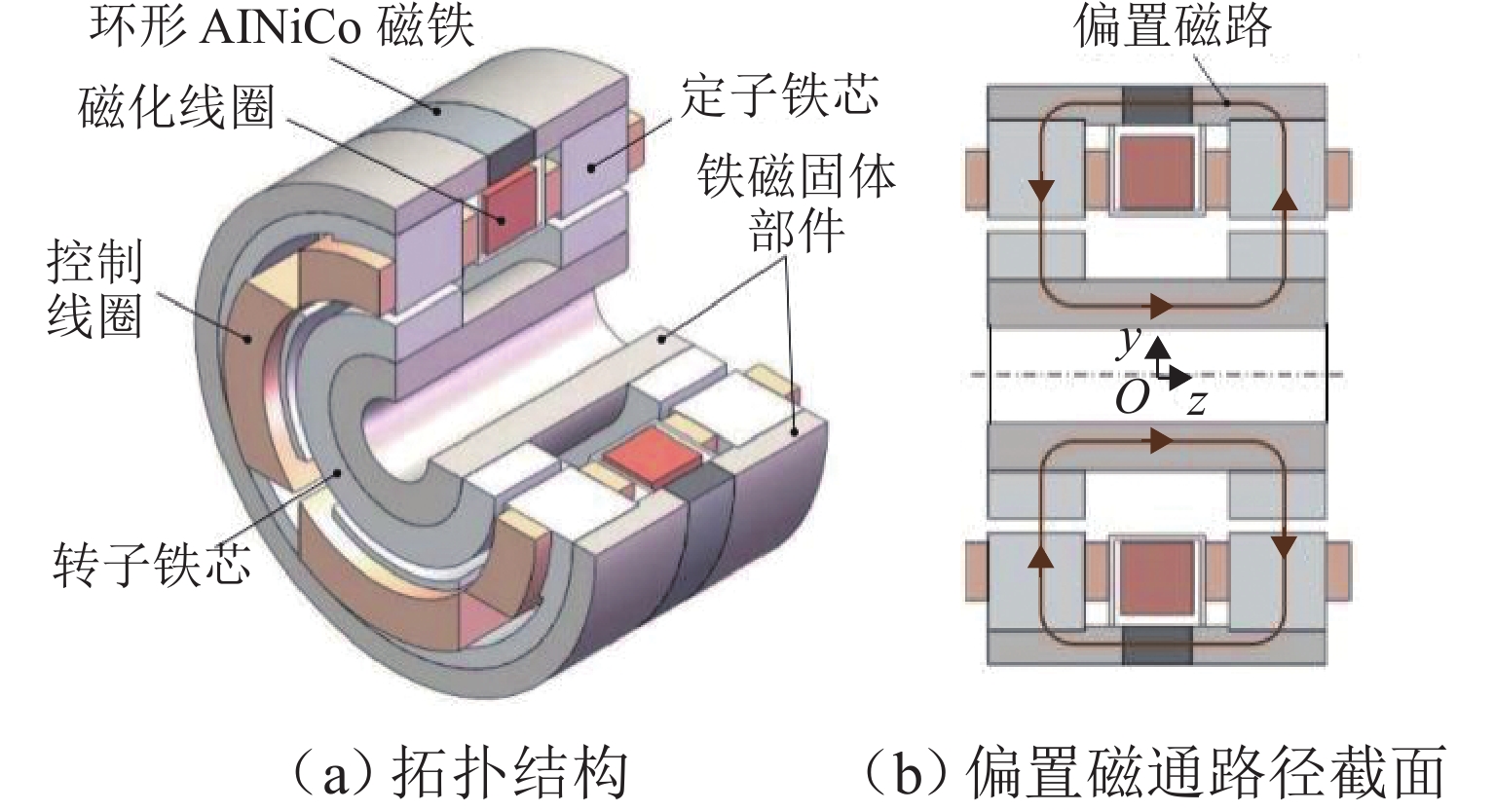
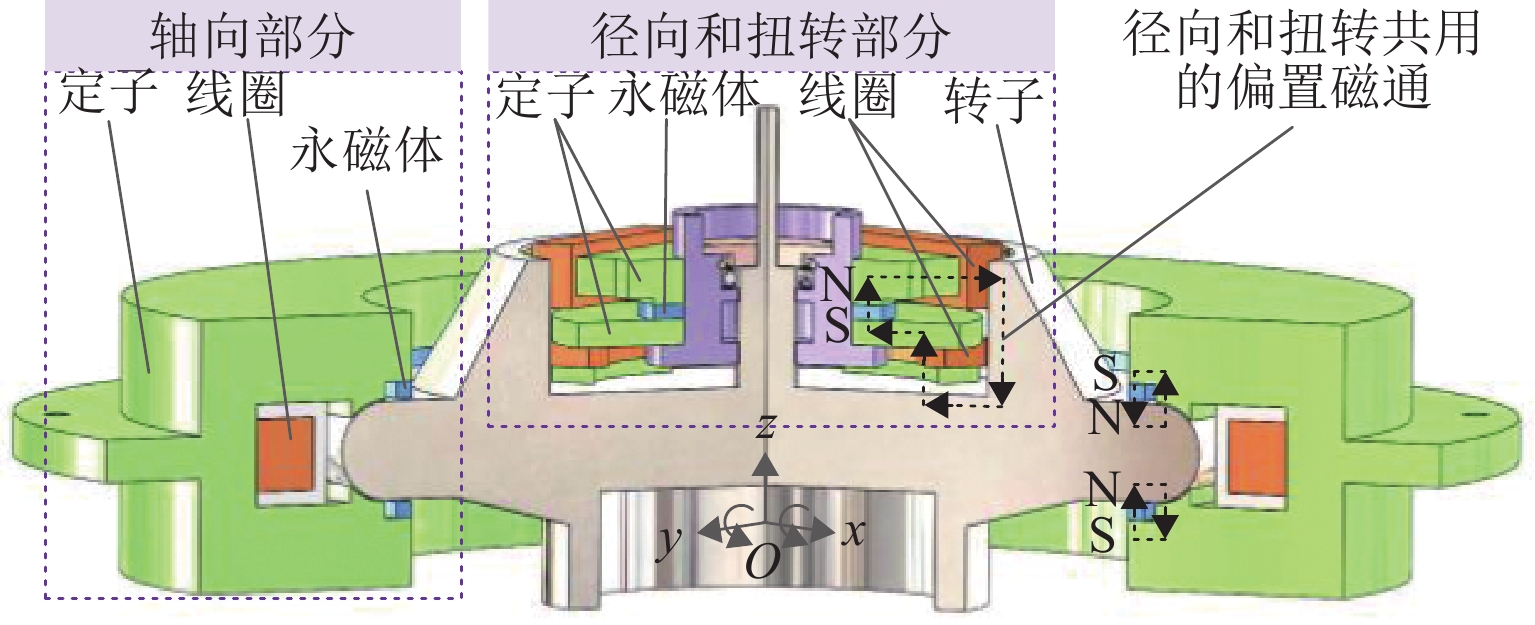
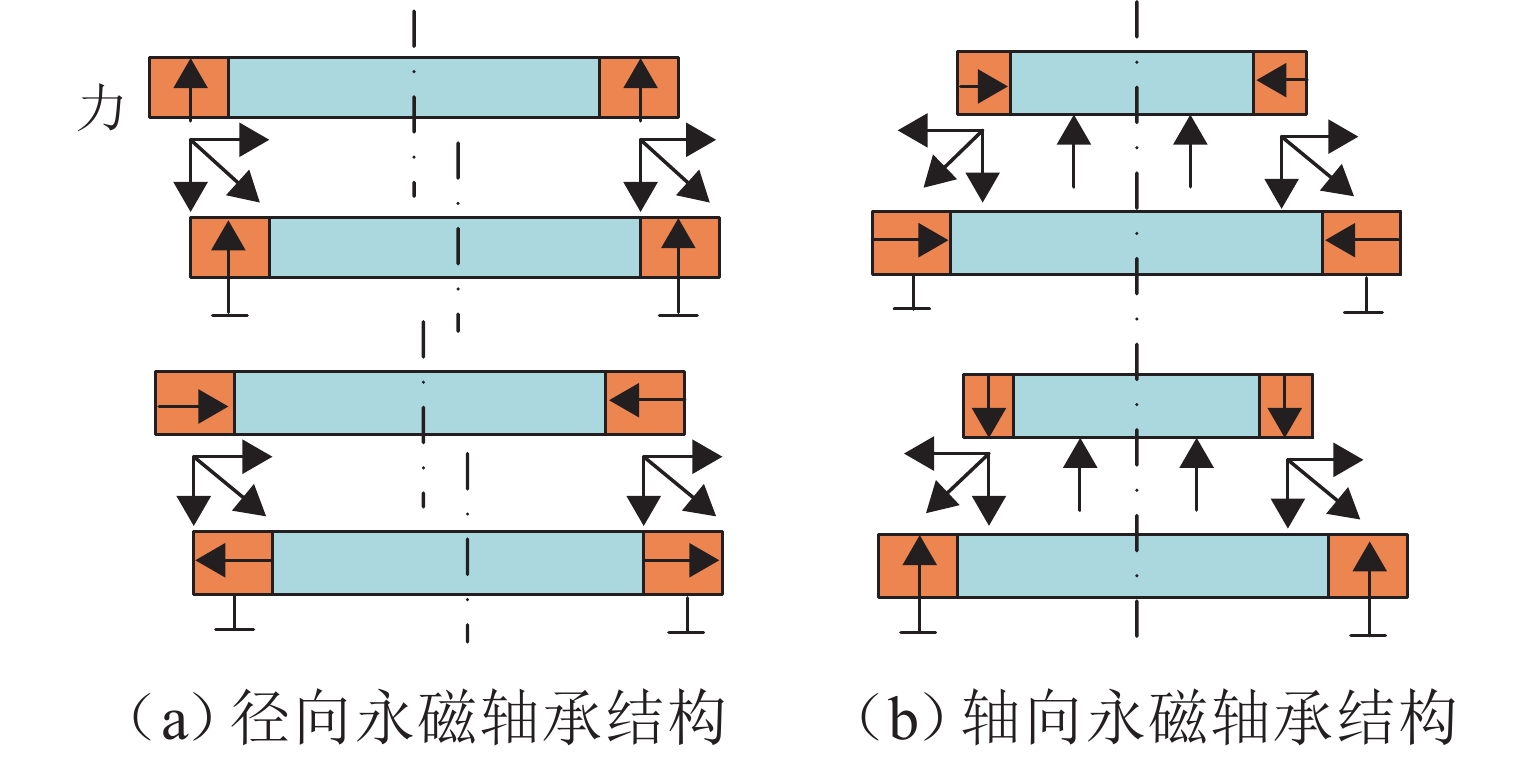
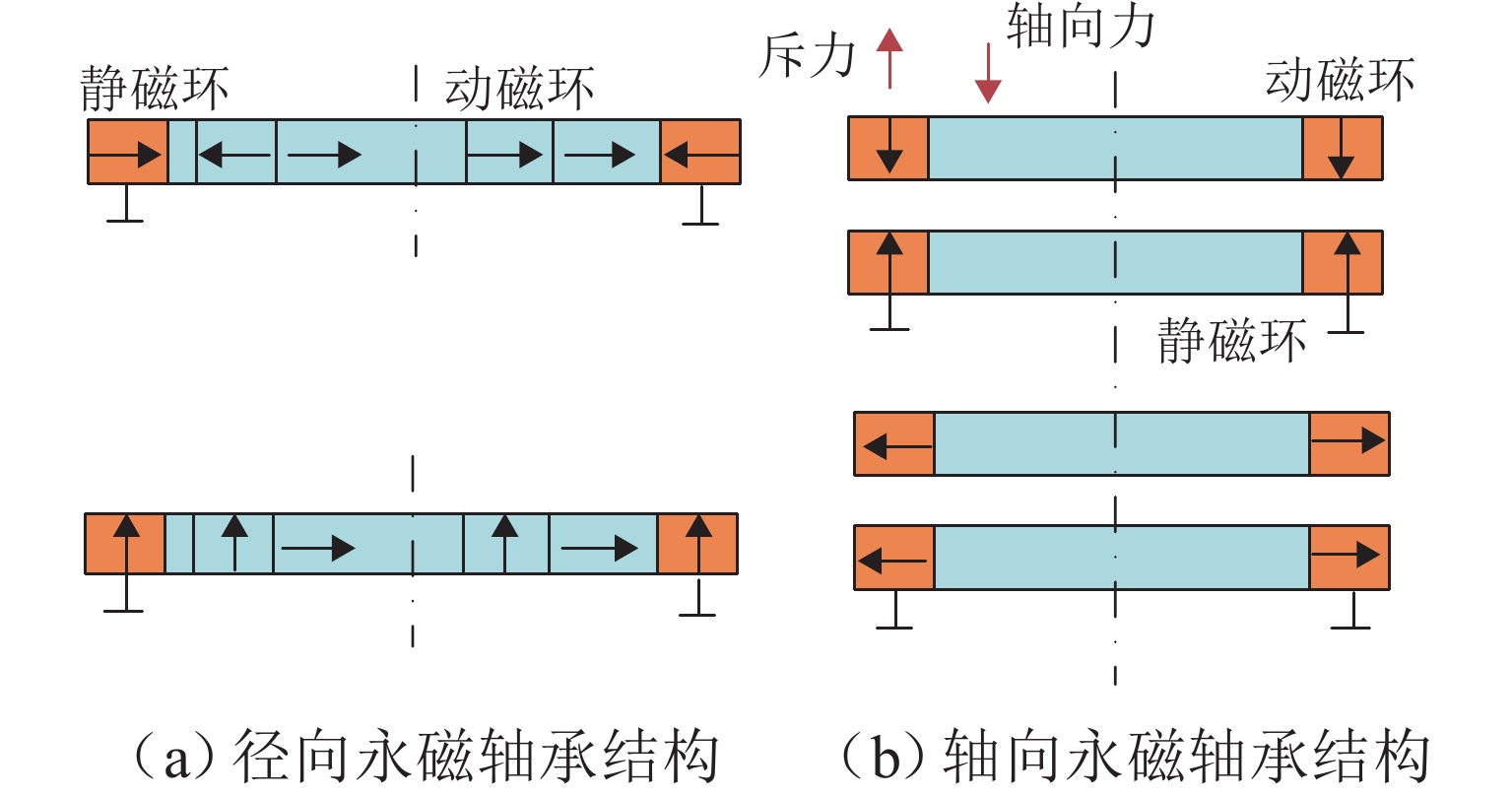
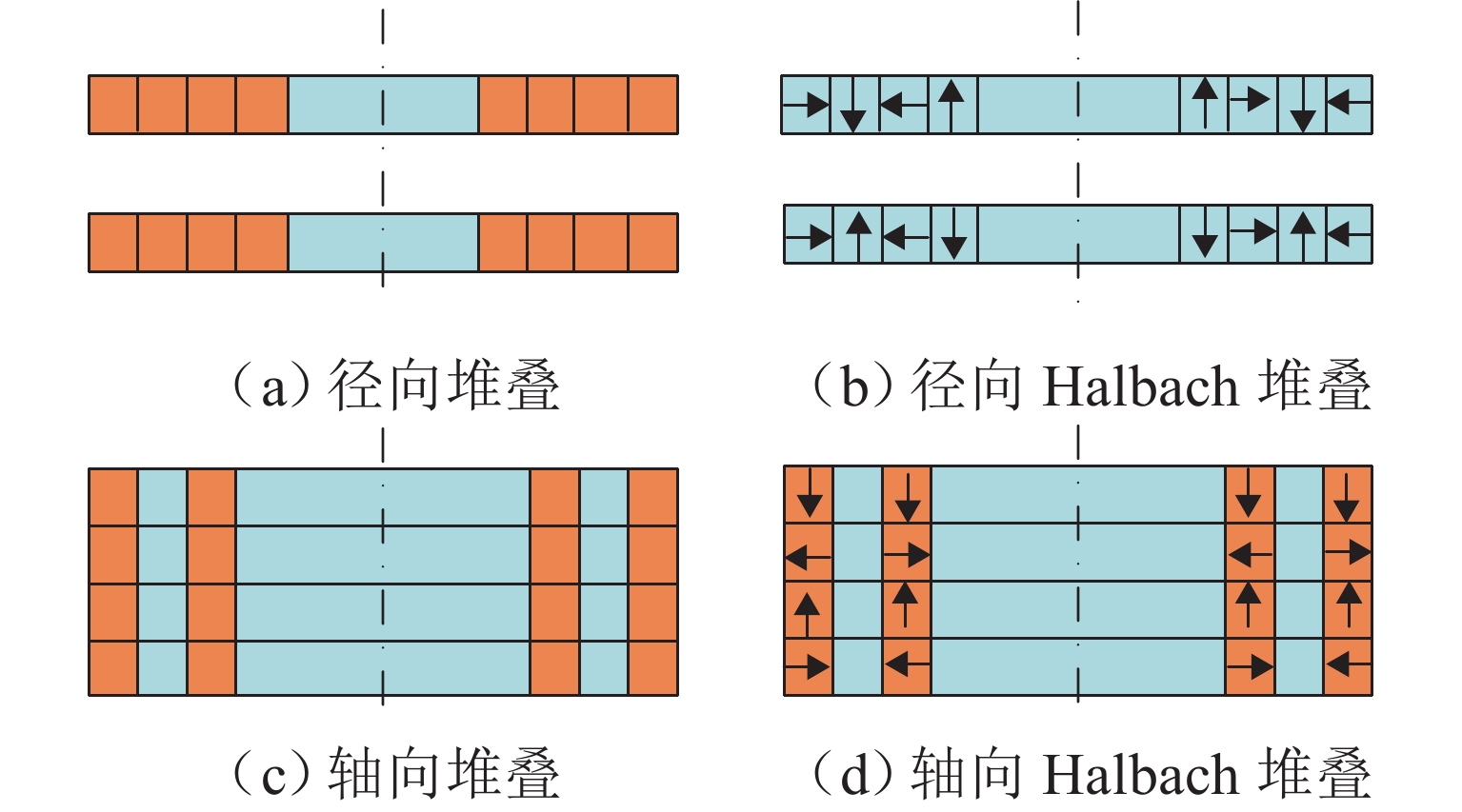
Magnetic suspension bearings are devices that suspend the rotating shaft at an equilibrium position by magnetic force action, thereby eliminating the contact friction between rotors and stators. Different from the support methods of traditional bearings, magnetic suspension bearings exhibit significant advantages in rotational speed increase, control precision optimization, and low energy consumption, achieving the core demands of high-speed operation, precise control, and zero-friction operation. Magnetic suspension bearings have been widely applied in key fields such as industrial manufacturing, flywheel energy storage, aerospace, and high-speed machine tools. However, with the increasing demand of modern industries for high-performance bearings and the continuous deepening of the concept of low carbon and environmental protection, the technical improvement and performance breakthrough of magnetic suspension bearings have become an urgent requirement of industry development. The relevant research also catches extensive attention from academia and industry. Research progress in magnetic suspension bearings was reviewed systematically. The classification system was first clarified based on the magnetic suspension force generation method (attractive type and repulsive type), followed by reviewing core research content of magnetic suspension bearing systems such as topological structure design, mathematical modeling, and control strategies. The current state of the art in technical research was comprehensively presented. Although phased achievement has been made in basic theory and engineering applications, core technical bottlenecks remain, including stability control under high-temperature/high-speed operating conditions, permanent magnet demagnetization protection, system integration and miniaturization, and cost control. Future research should focus on deepening of multi-field coupling mechanisms, the integration of intelligent control algorithms, and the design of lightweight and low-cost systems, so as to provide technical support for the large-scale application of magnetic suspension bearings under more extreme operating conditions and in broader fields.


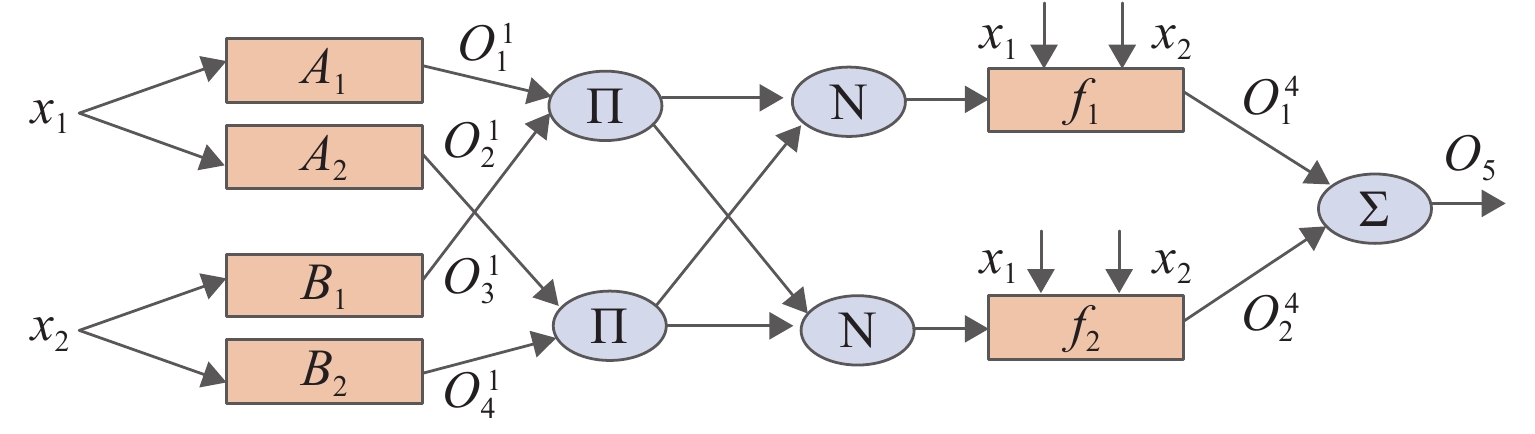

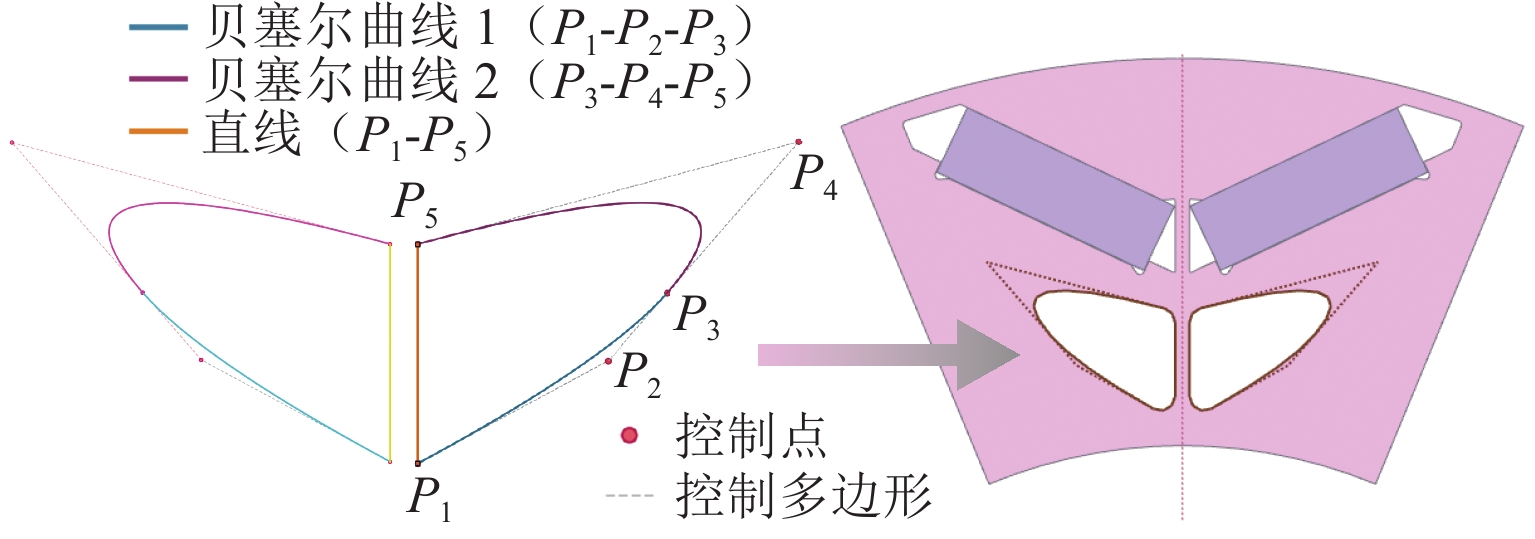
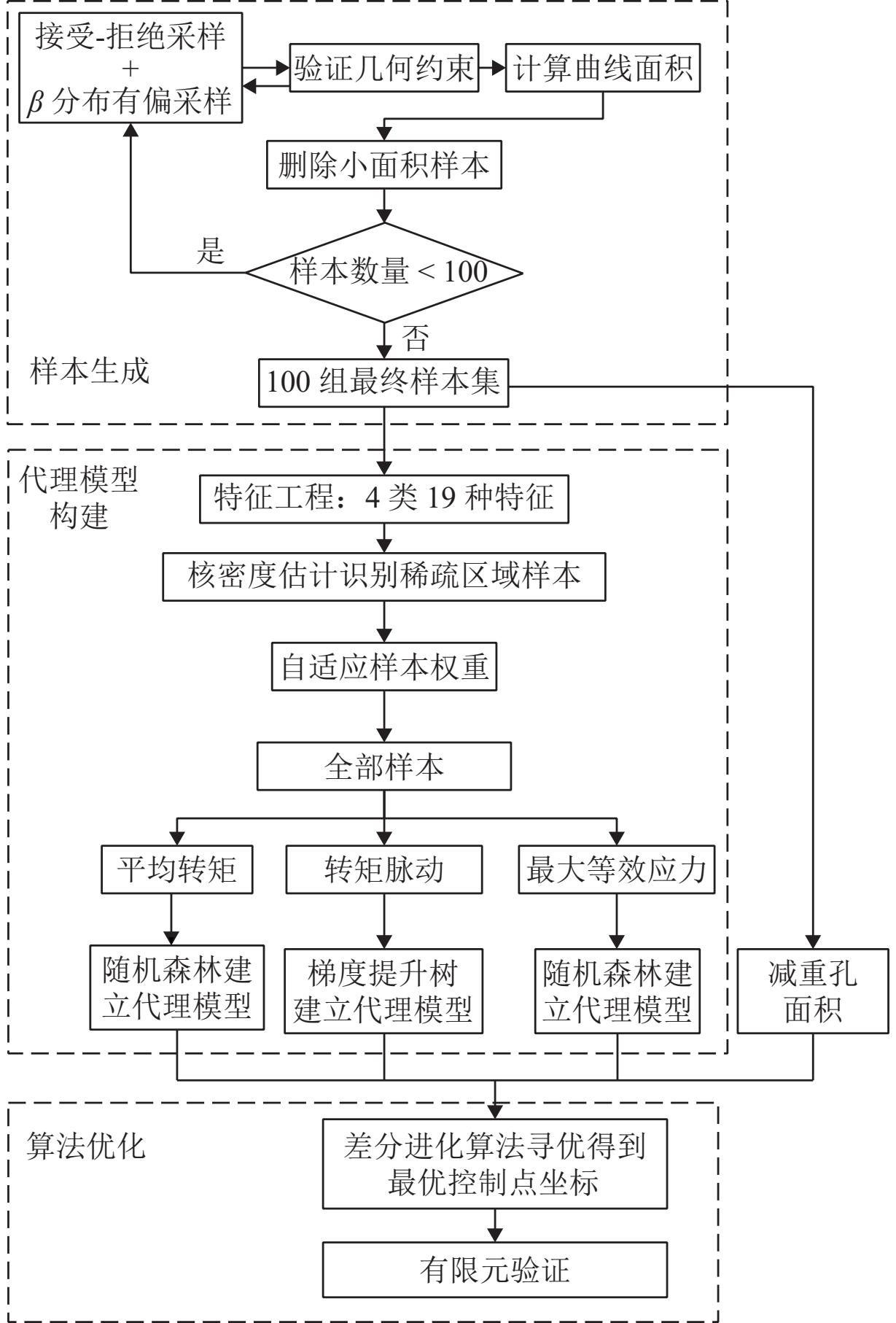
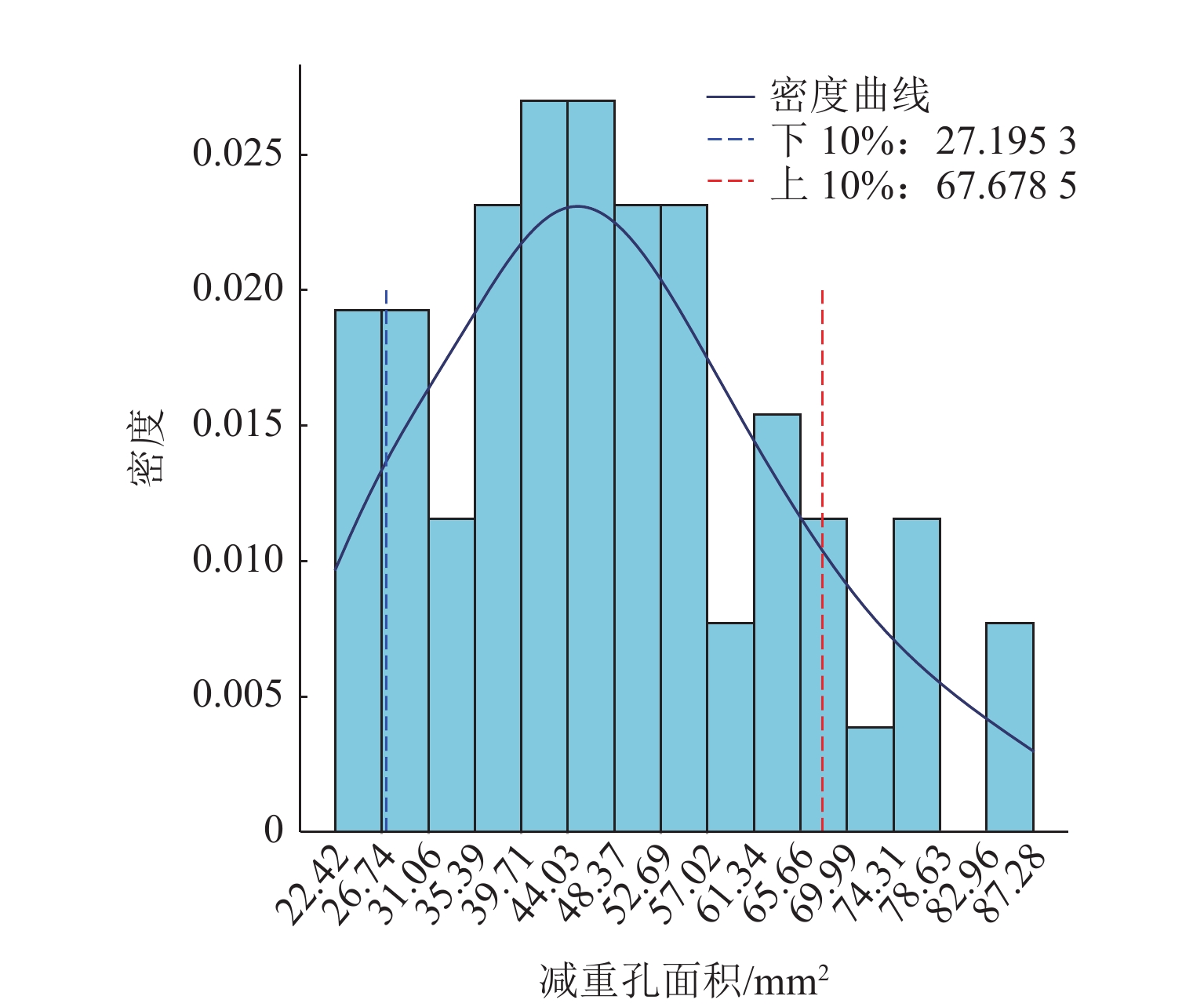
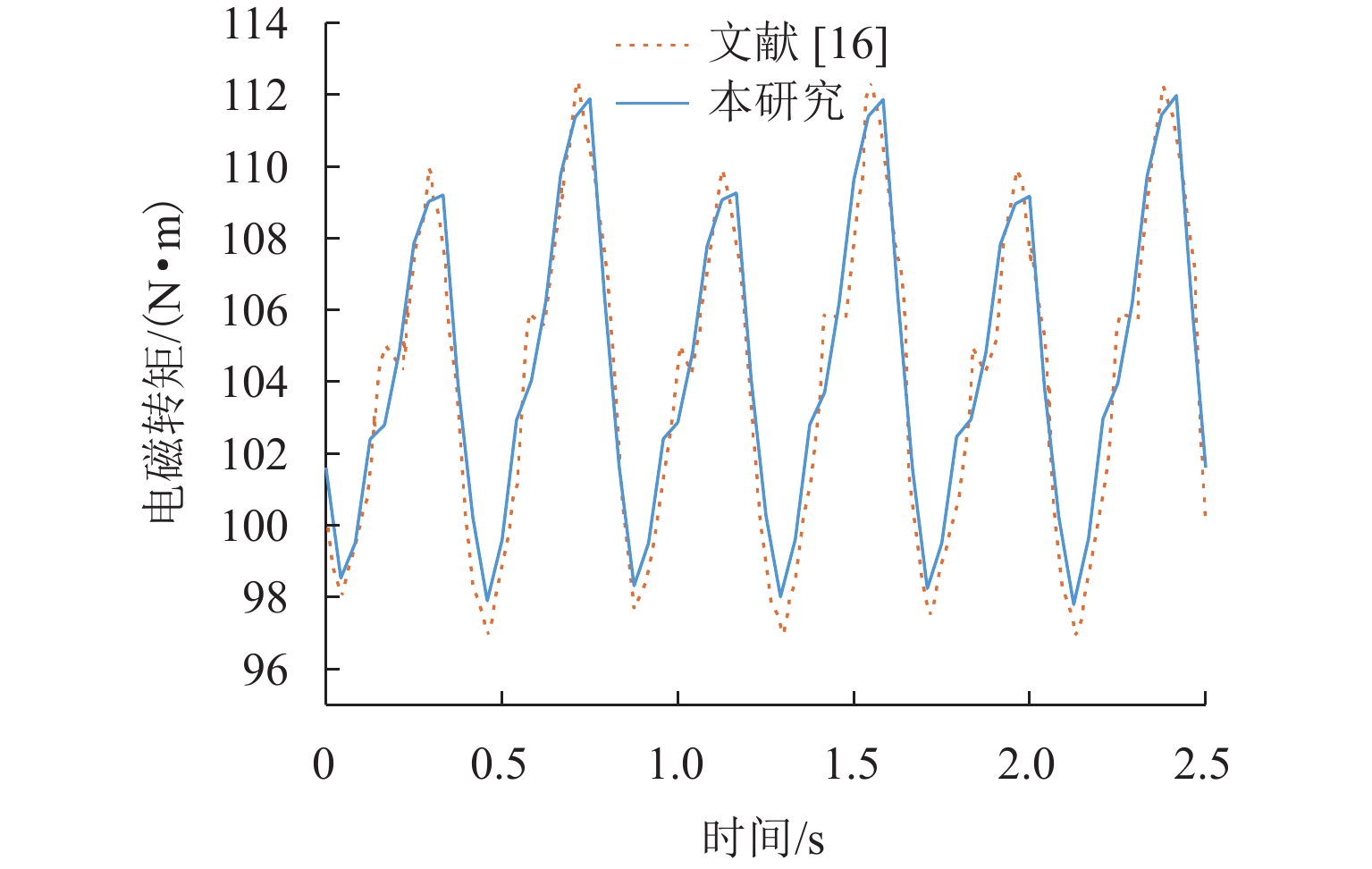
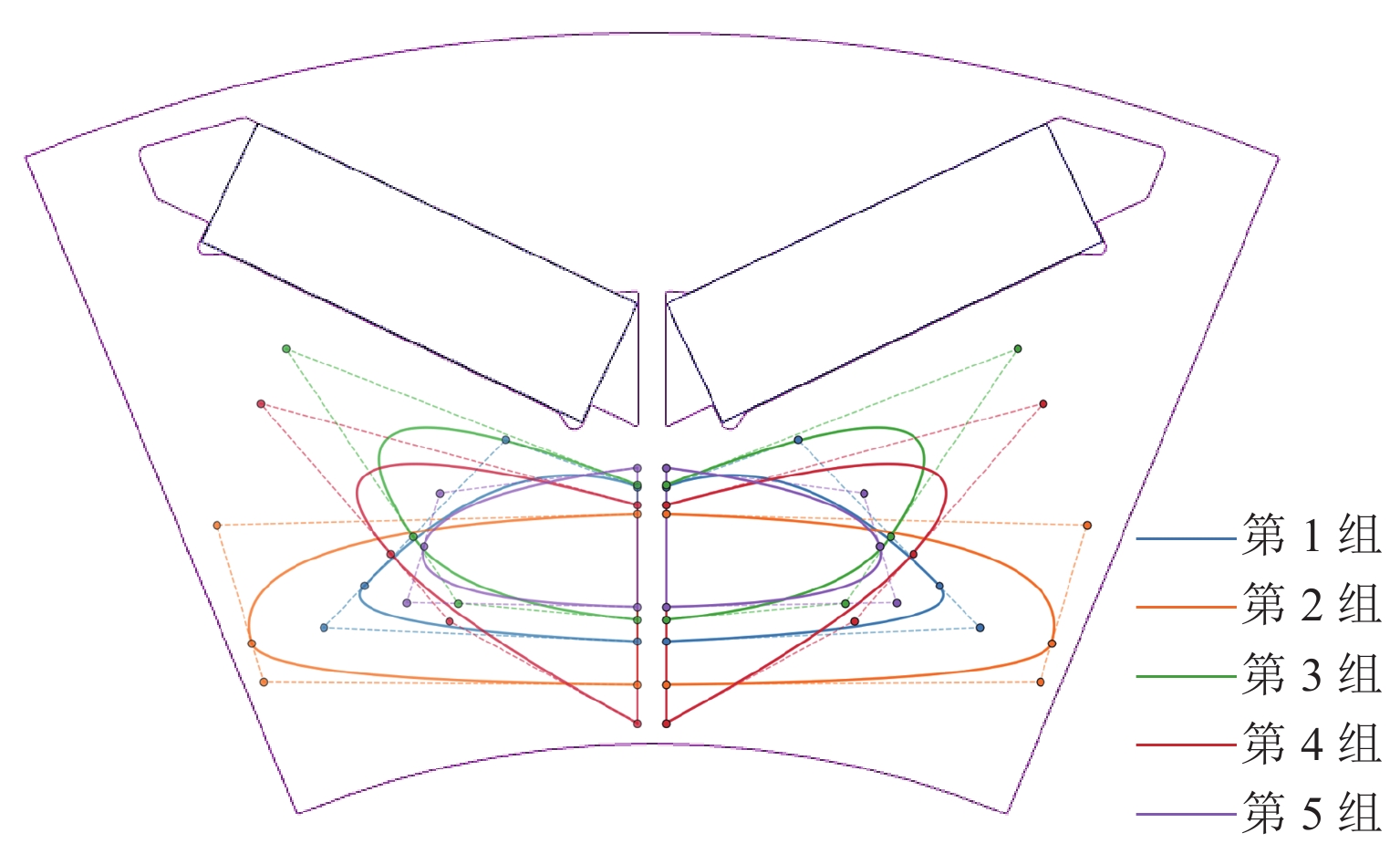
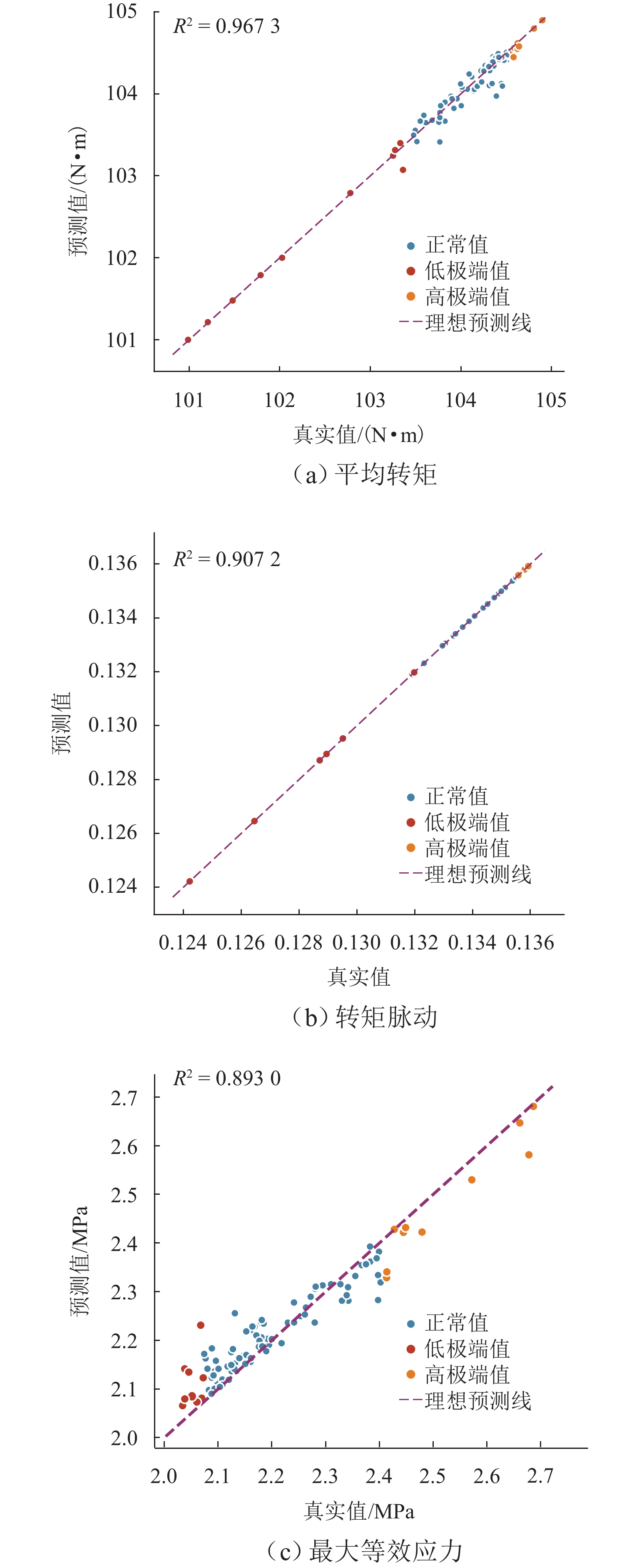
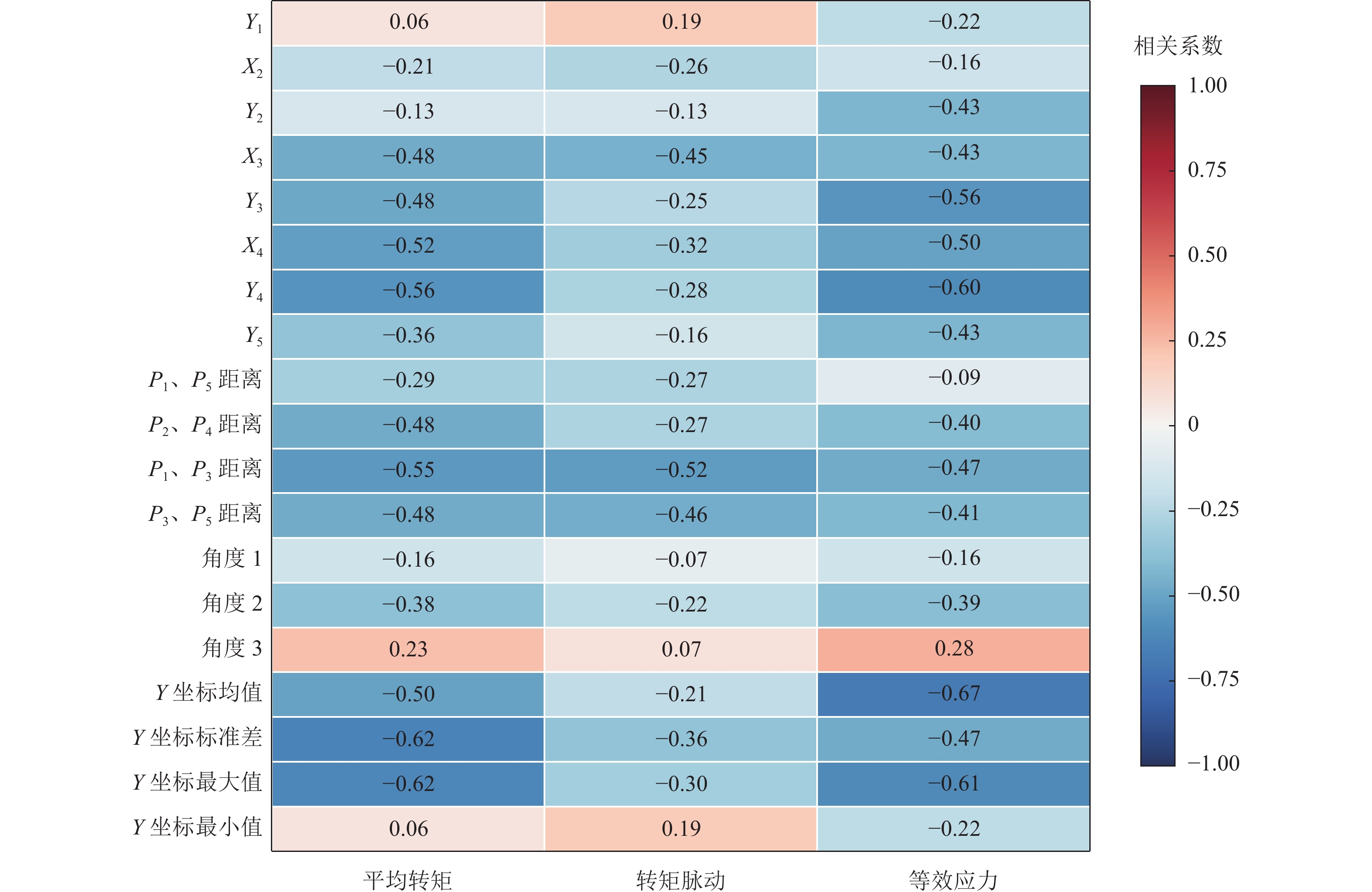
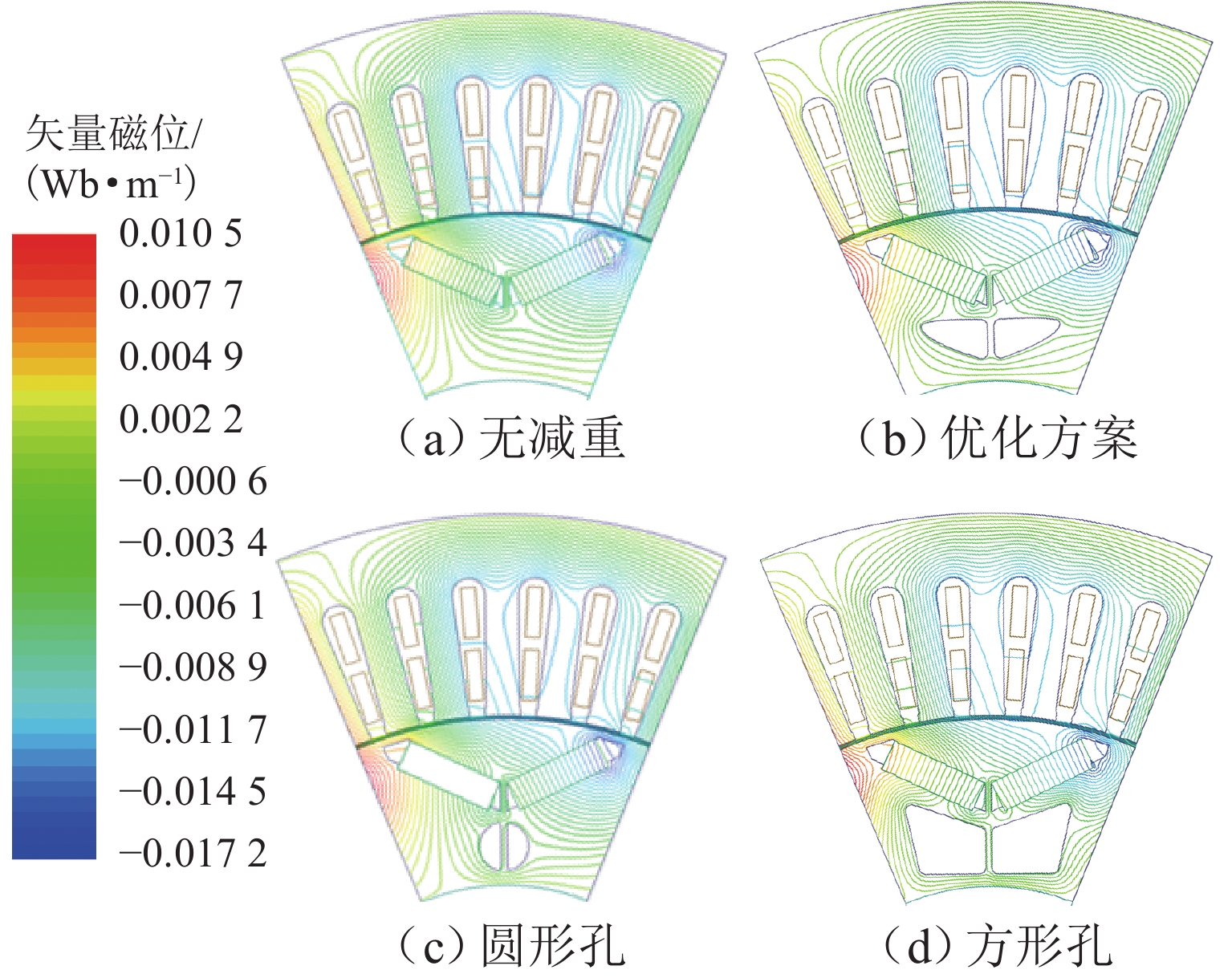
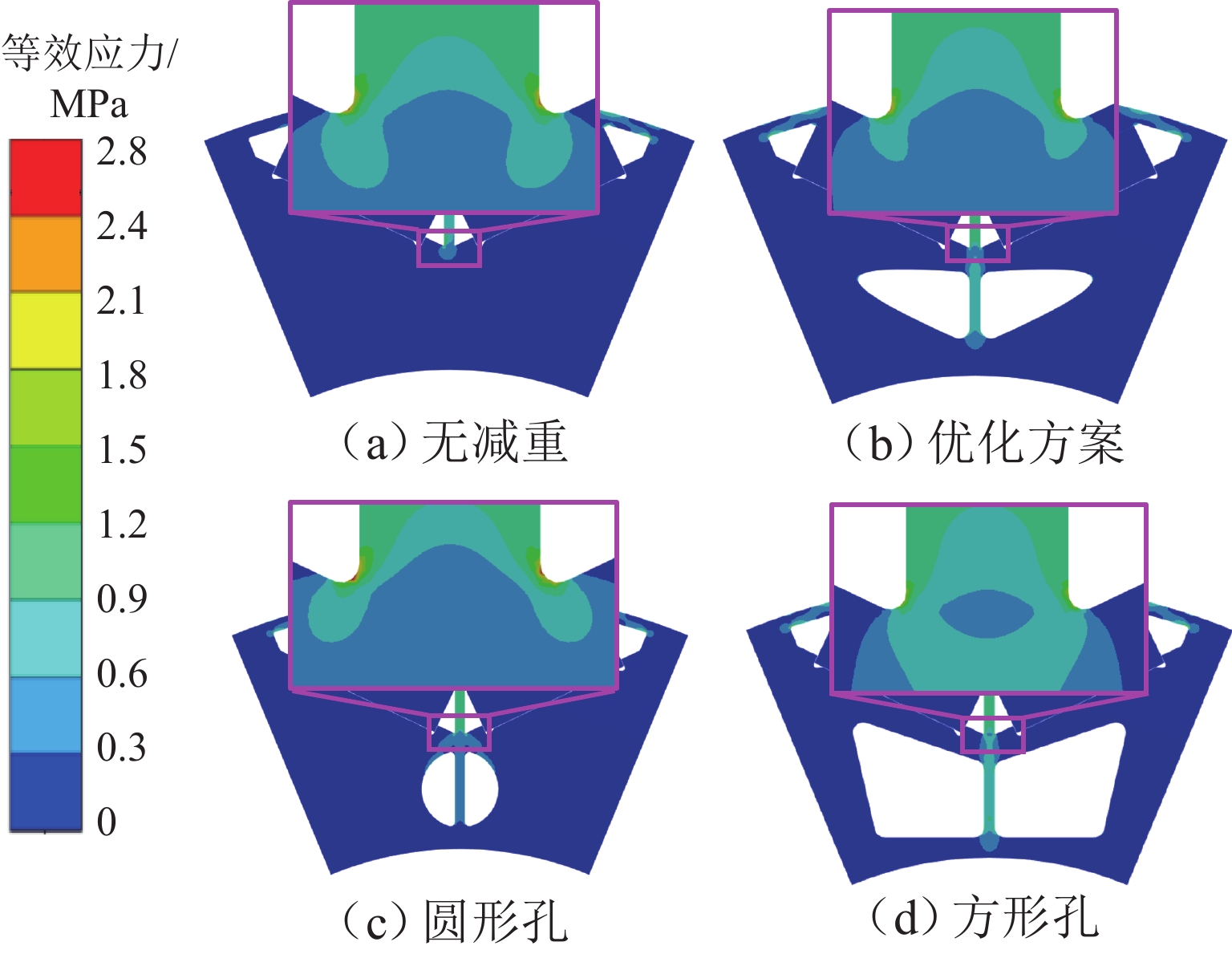
To address the problems of insufficient geometric freedom and difficulty in balancing multi-physics requirements in the lightweight design of rotor laminations for traditional interior permanent magnet synchronous motors, an optimization design method integrating parametric geometry, sampling under complex constraints, and machine learning was proposed. First, a lightening cavity contour was constructed using two connected second-order Bézier curves defined by five control points, achieving a geometric description with few parameters and high flexibility. Second, an experimental design method integrating acceptance-rejection sampling and a parameter bias strategy was proposed to generate 100 sets of high-quality samples under complex constraints. Then, a surrogate model based on feature engineering, kernel density estimation, and an adaptive weighting strategy was constructed to perform high-precision prediction of average torque, torque ripple, and maximum equivalent stress, with a coefficient of determination
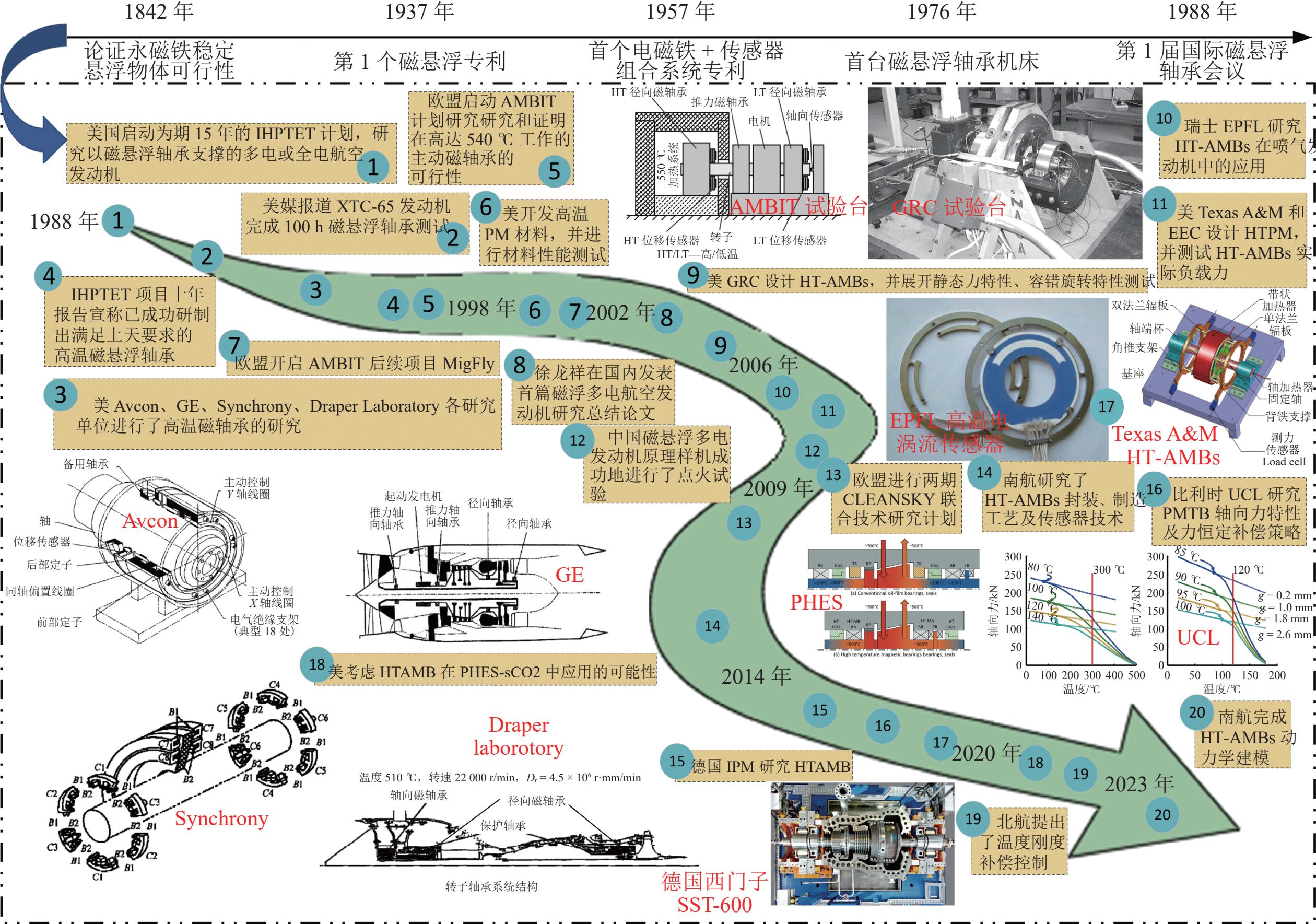
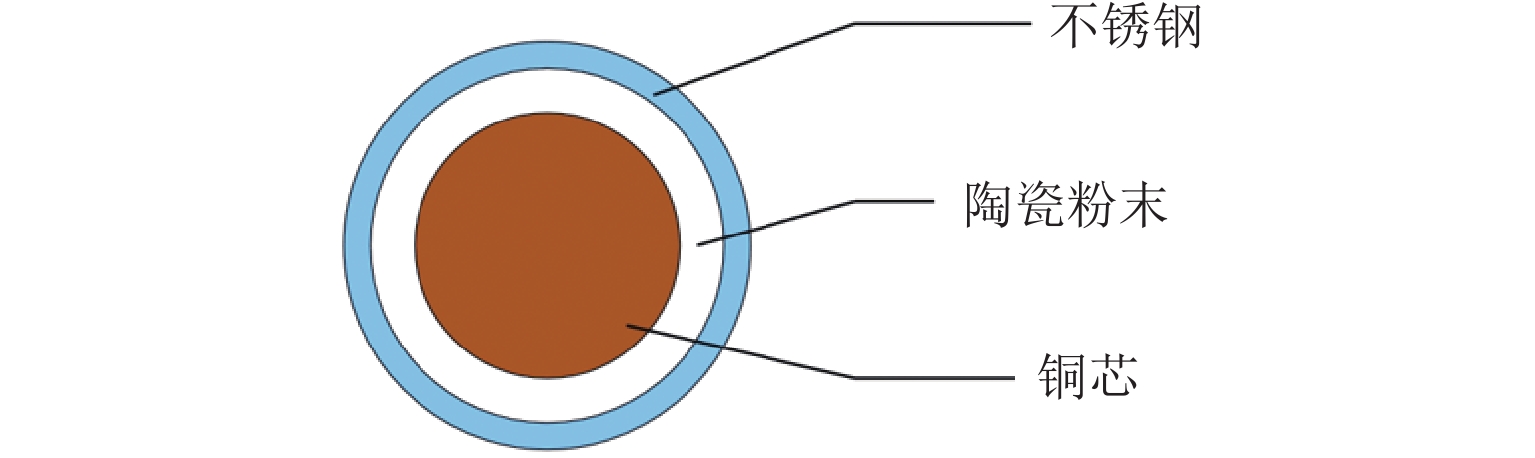
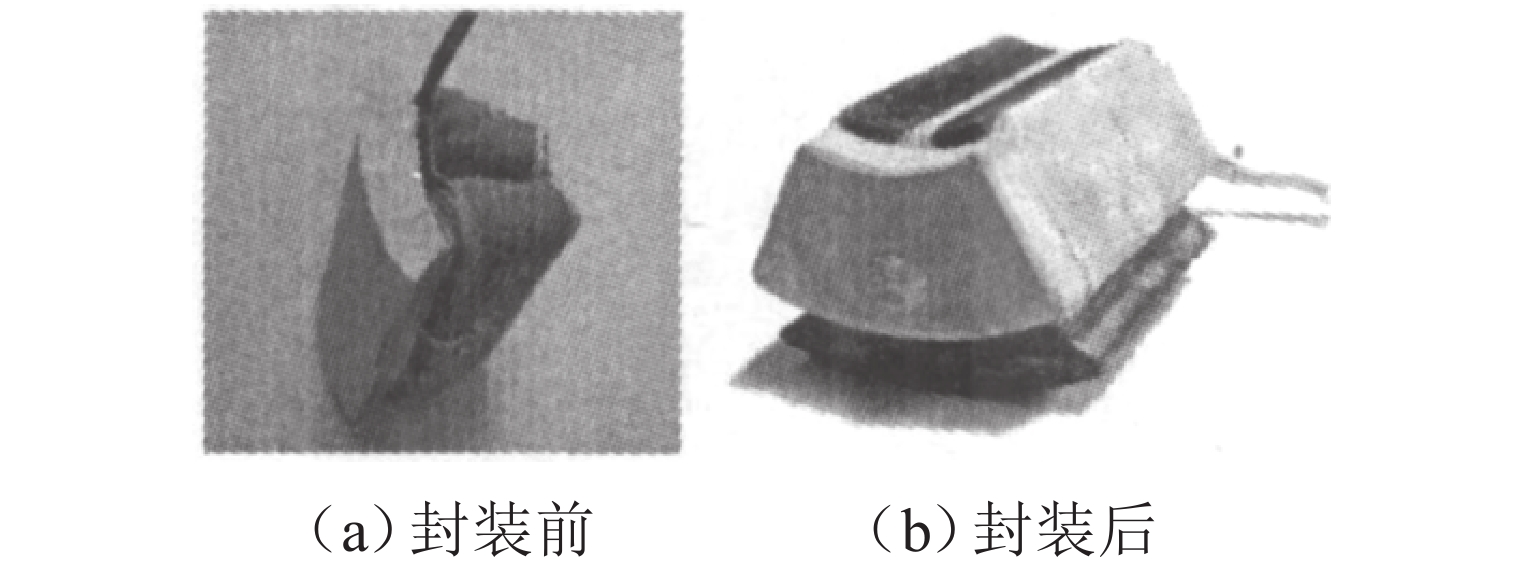
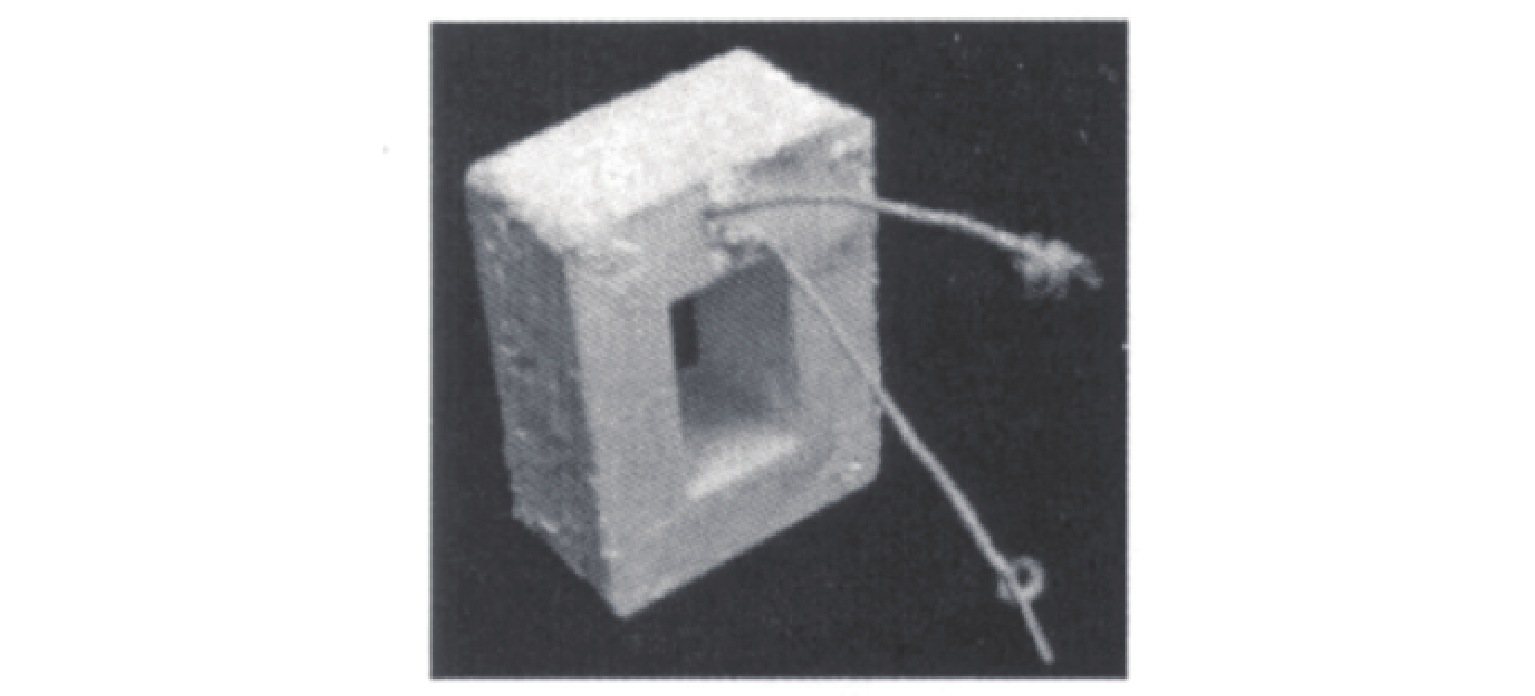
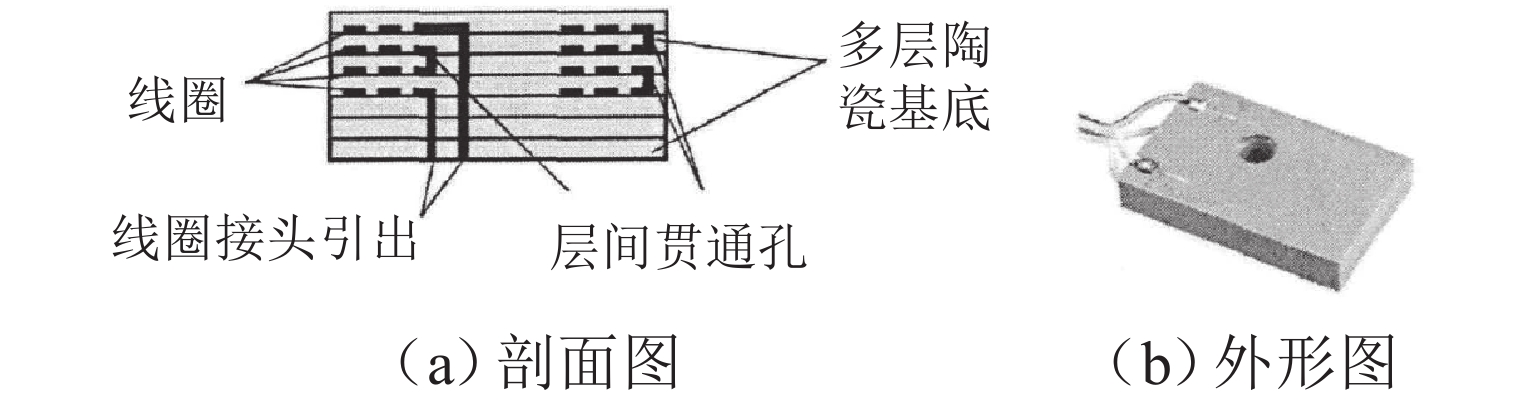
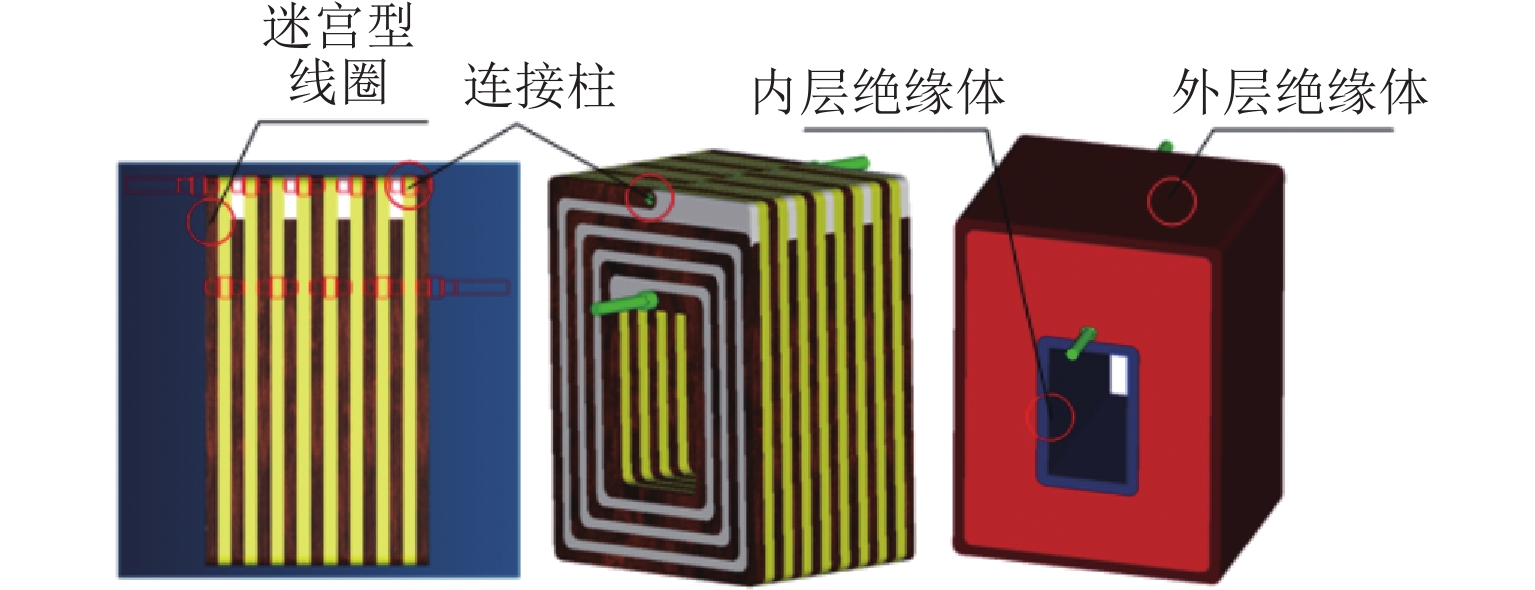
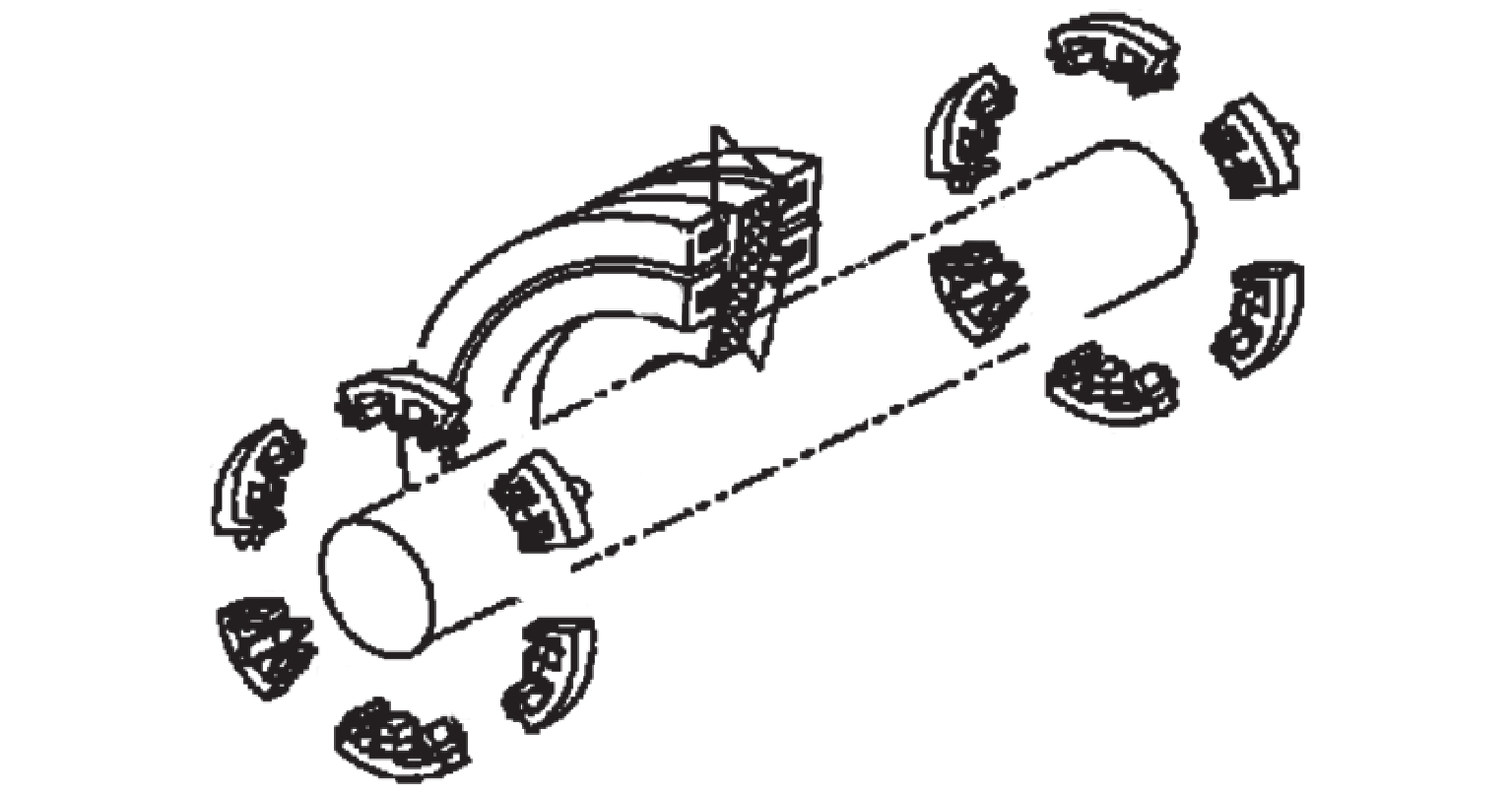
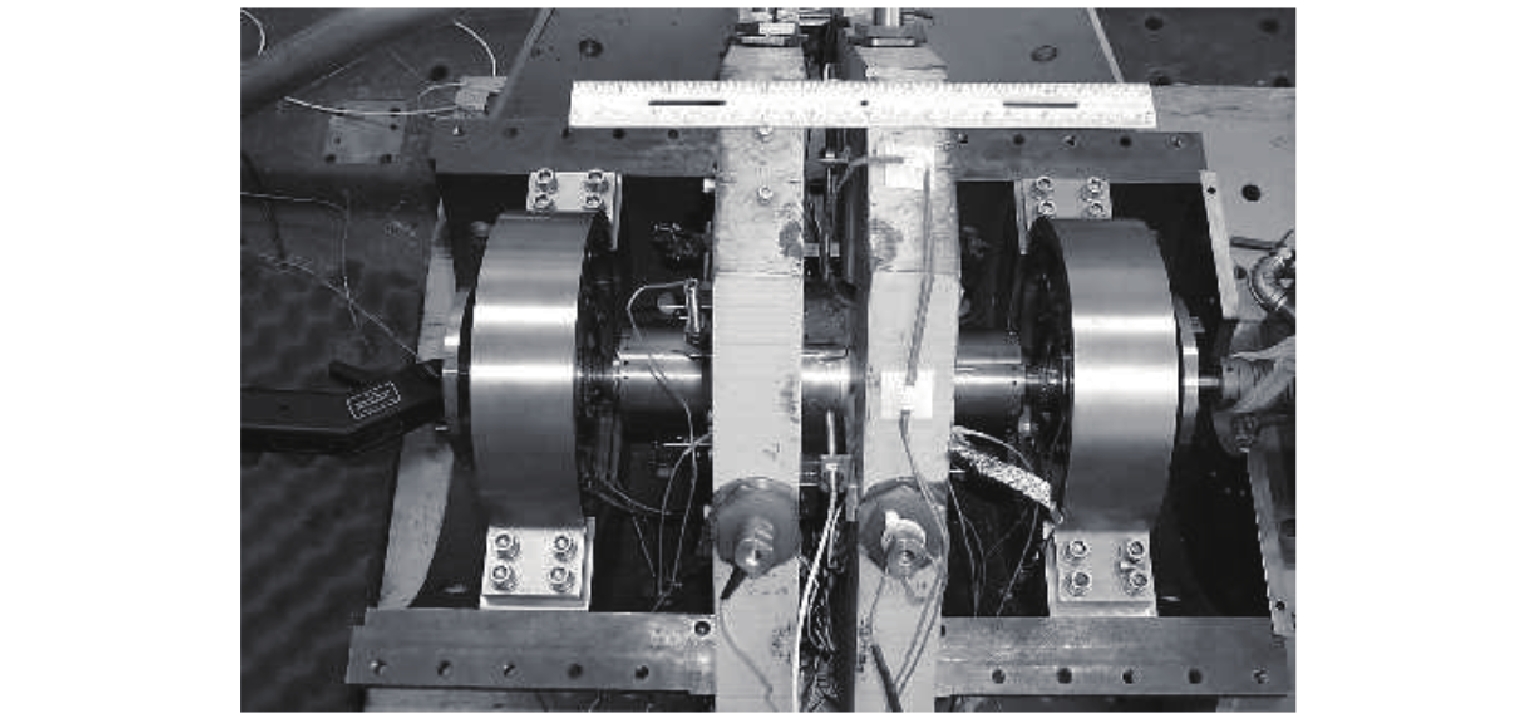
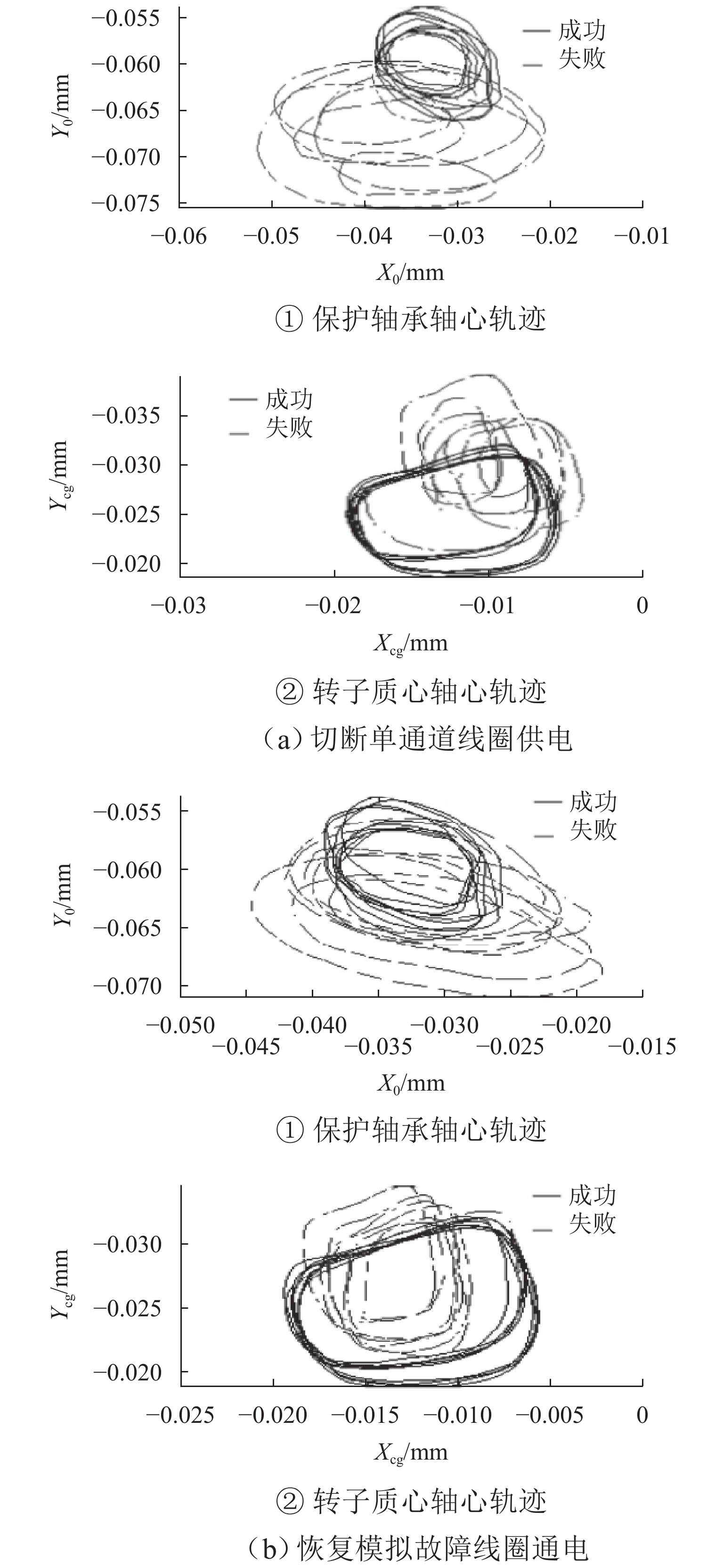
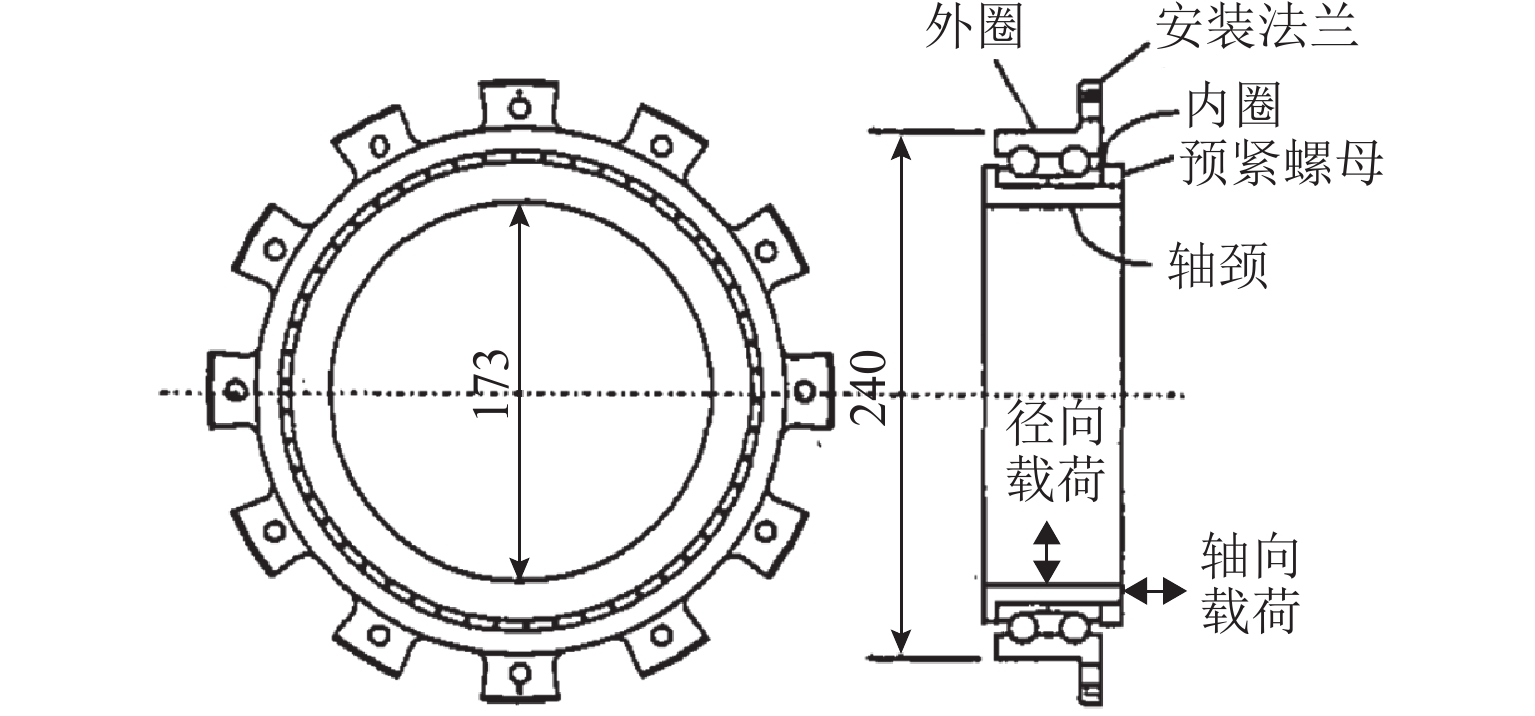
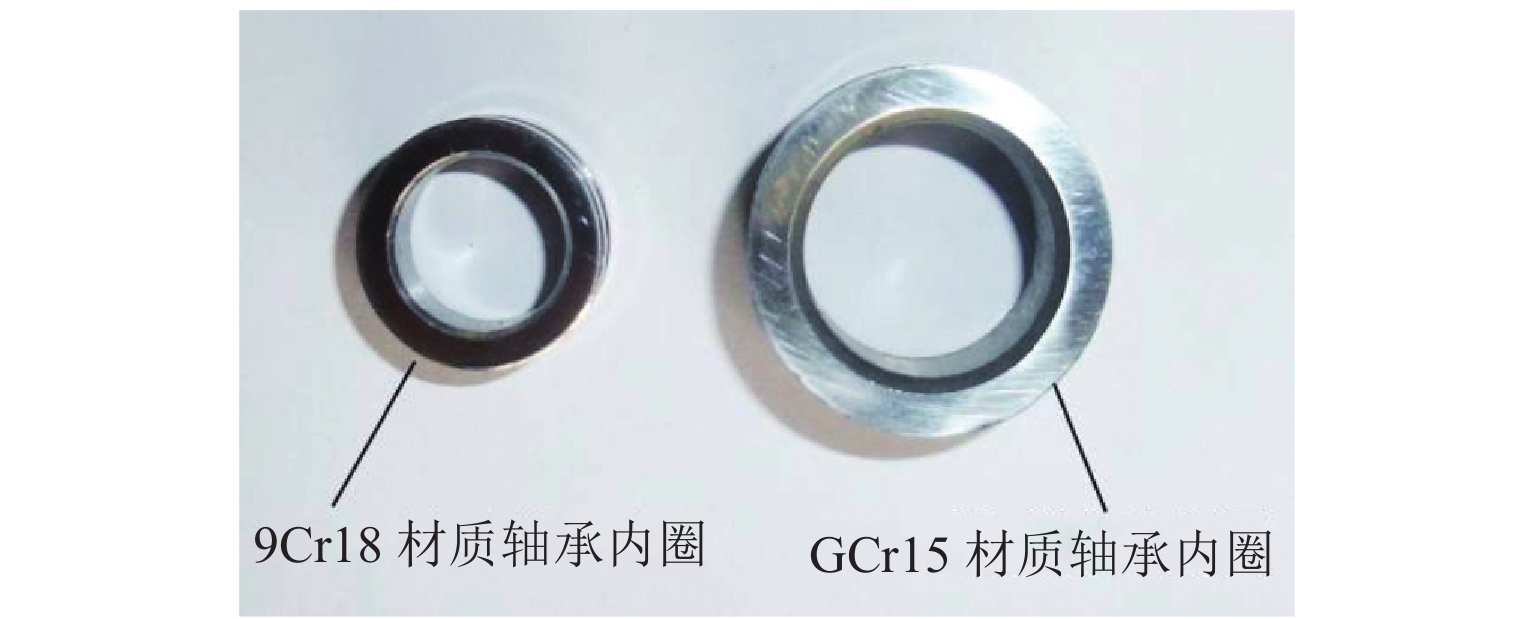
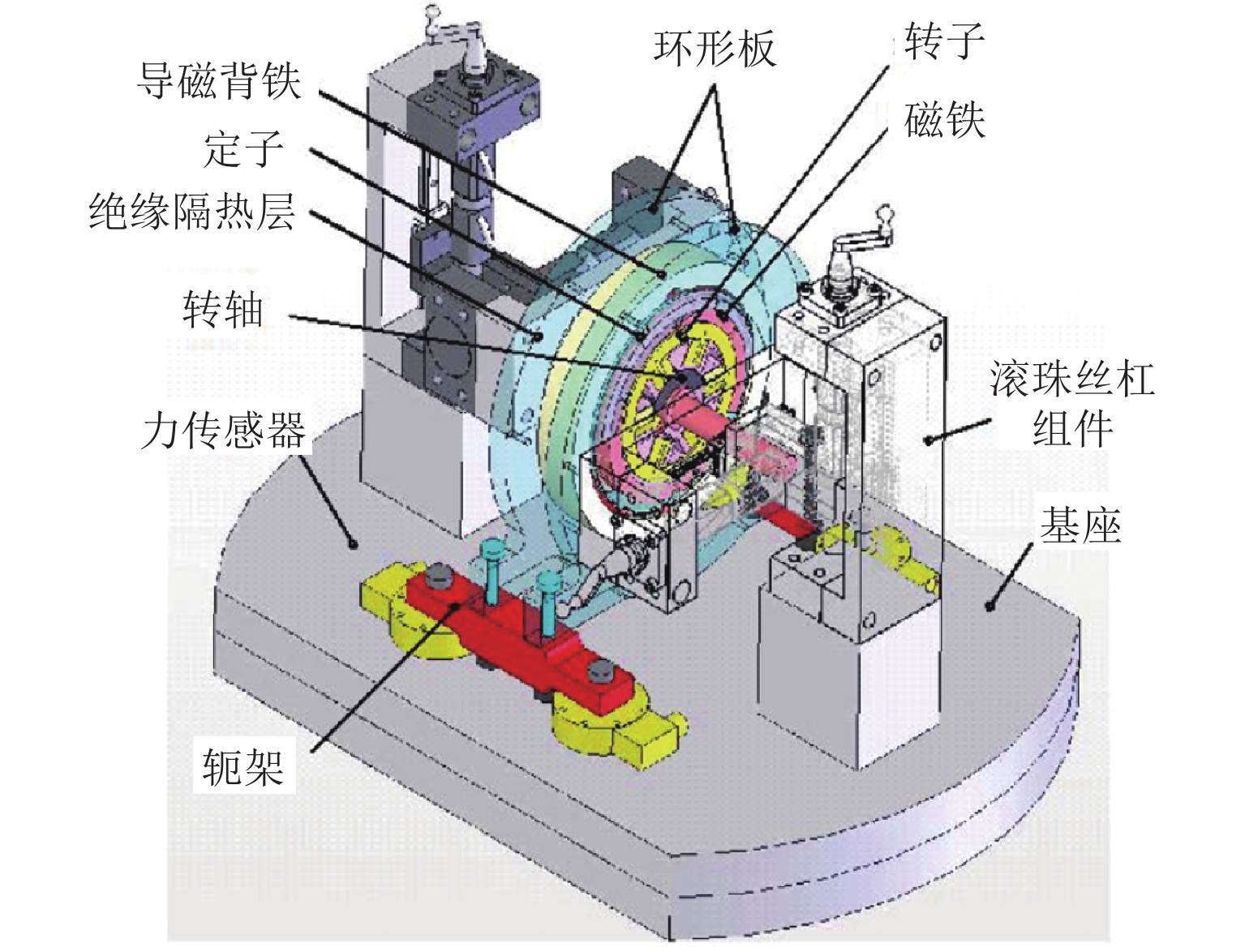
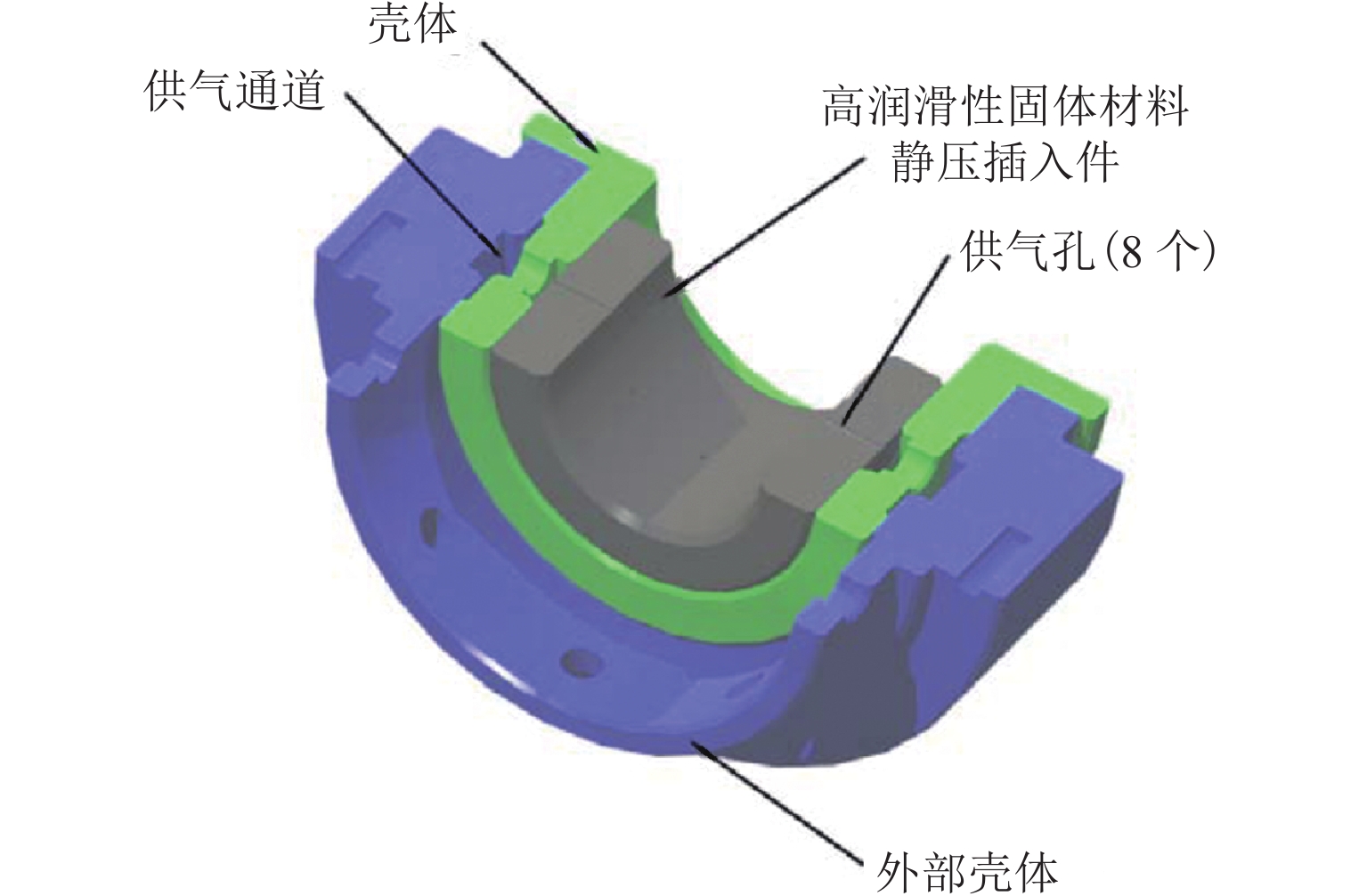
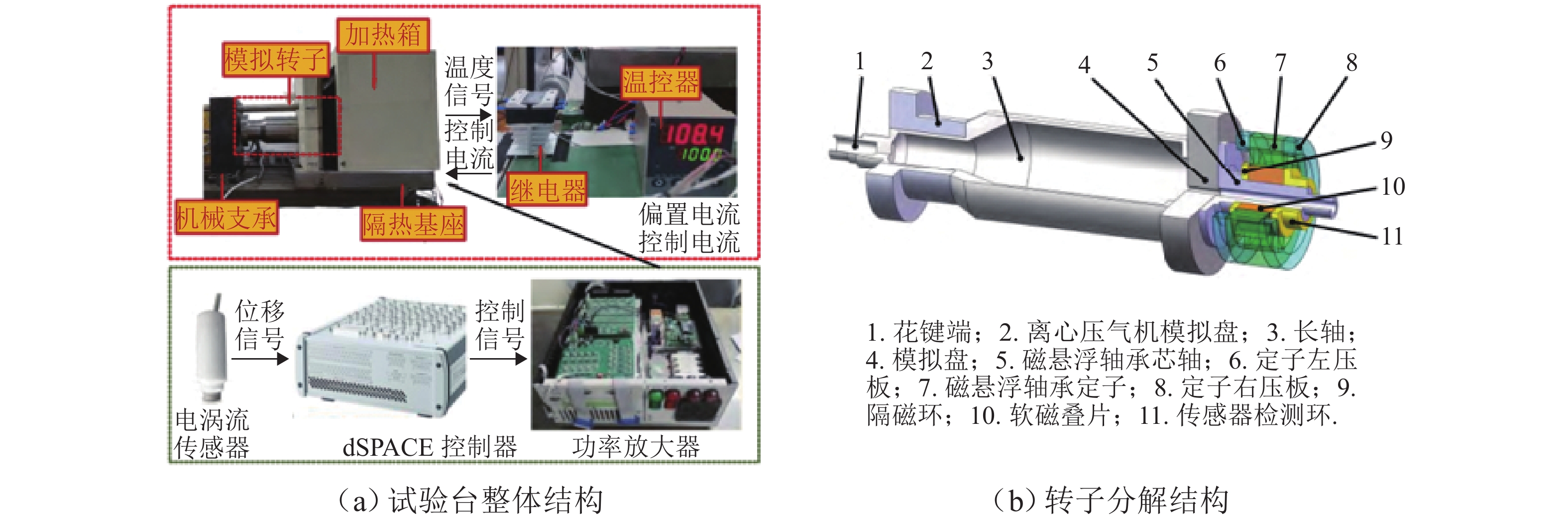
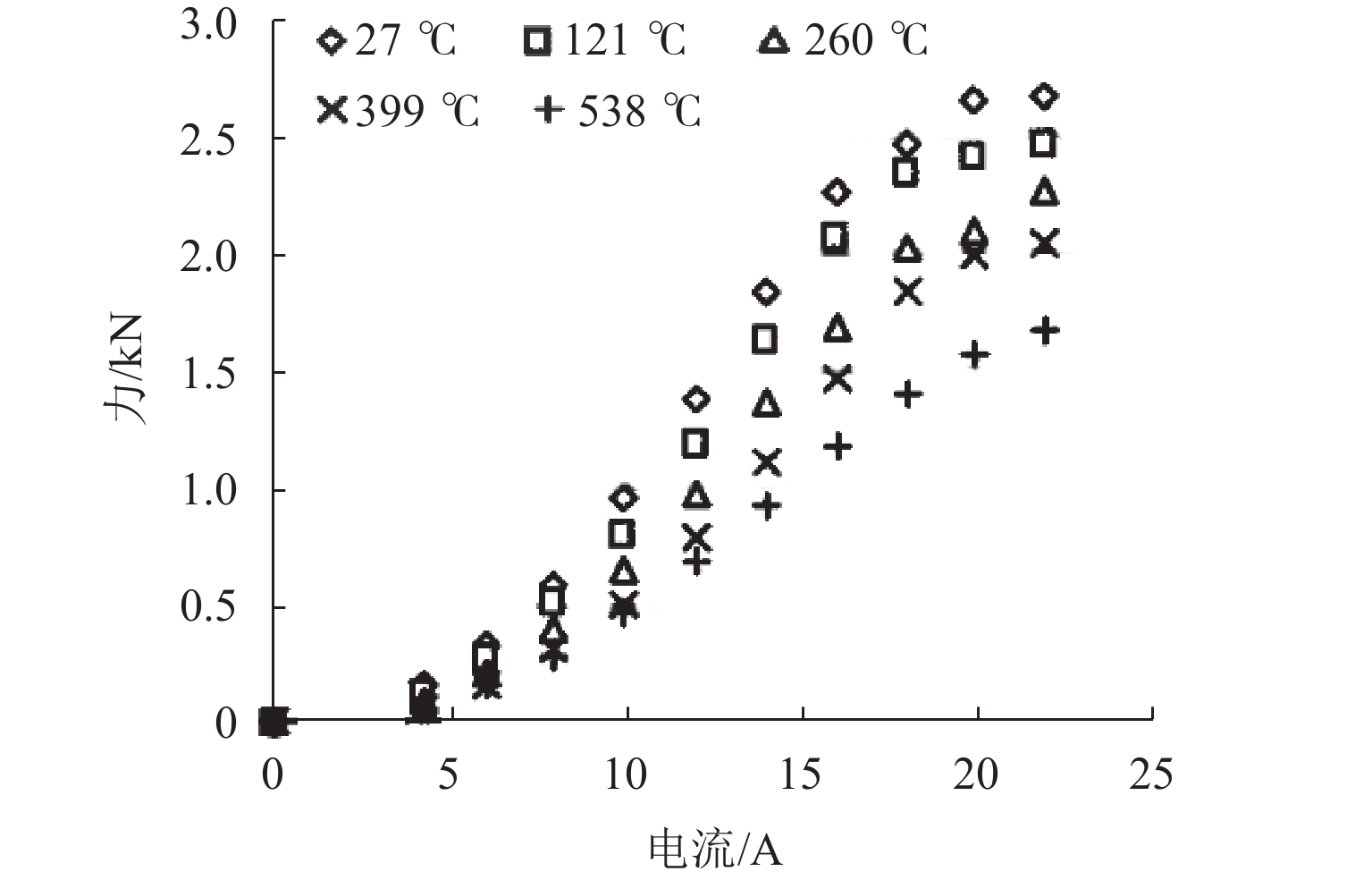
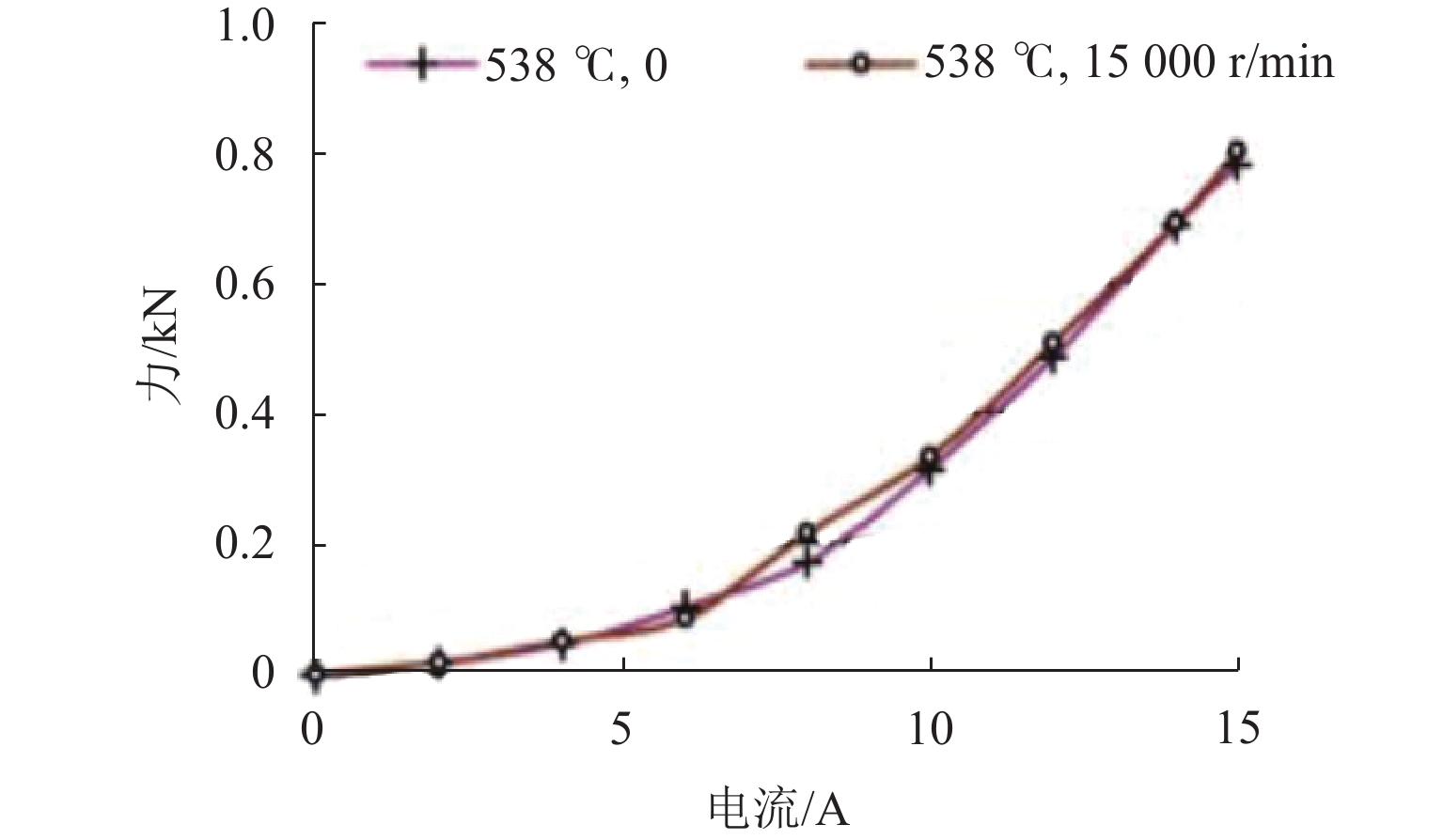
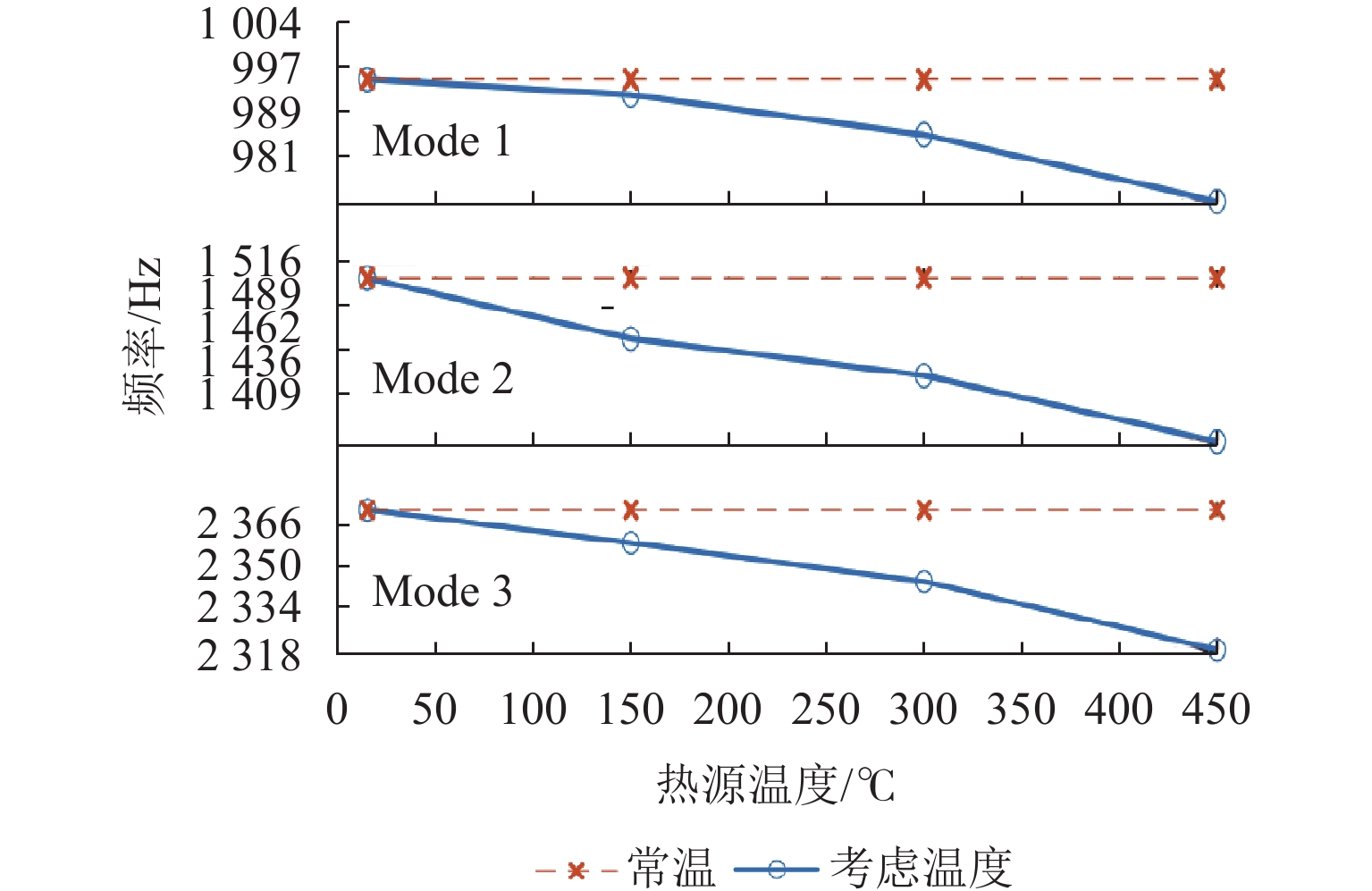
High-temperature active magnetic bearing technology is a key technology to replace traditional bearings and achieve stable operation under high-temperature and high-speed conditions. Its design complexity is significantly higher than that of ambient-temperature magnetic bearings. Based on relevant Chinese and international research literature, the research progress of high-temperature active magnetic bearings in four aspects, including material selection, mechanical system manufacturing processes and fail-safe mechanisms, high-temperature displacement sensor design, and rotor system modeling and dynamic characteristic analysis, was systematically reviewed. In terms of materials, the multi‑faceted effects of high temperature on magnetic bearing structure, materials, and components were analyzed, with focus on three types of high temperature-resistant materials: stator/rotor cores, insulating coatings, and high‑temperature winding wires. In terms of manufacturing process and fail‑safe mechanism, key approaches to improving system reliability and safety were described, including encapsulation of high‑temperature excitation coils, redundant design, surface reinforcement of backup bearings, and hybrid high‑temperature magnetic bearings. In terms of high‑temperature displacement sensors, three sensor types (differential transformer, capacitive, and eddy‑current) were discussed, with emphasis on temperature compensation strategy and high‑temperature material selection for eddy‑current sensors. In terms of rotor system modeling and dynamic analysis, electromagnetic force modeling and dynamic modeling were covered, and the influence of high temperature on stiffness/damping, natural frequencies, and system stability was revealed from three perspectives: support characteristics, rotational characteristics, and boundary mechanical properties. This review identified the research progress and technical features of each key area and pointed out existing critical problems. Future research should focus on high-fidelity multi‑physics field coupling modeling, active vibration control strategies, multi‑scenario application adaptability, and material‑control‑structure co-optimization.

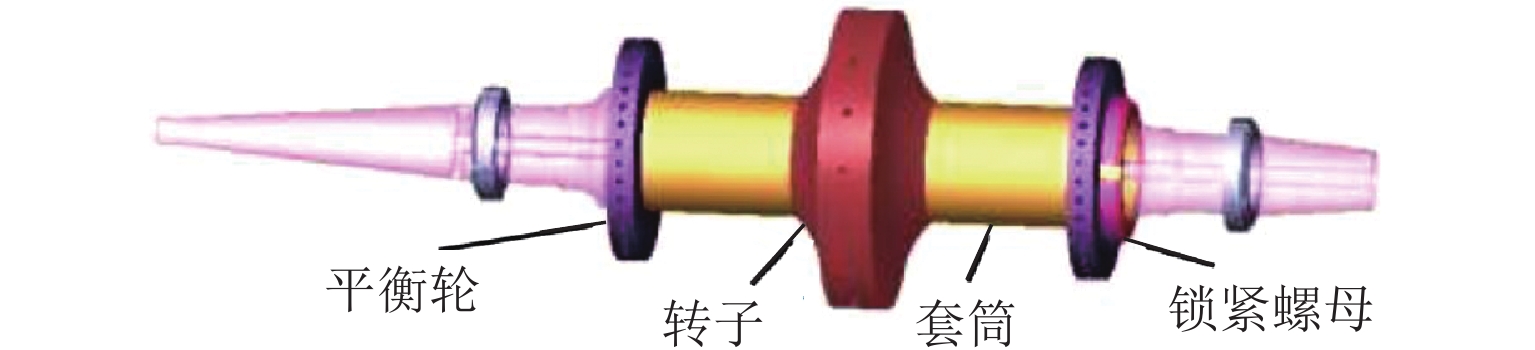
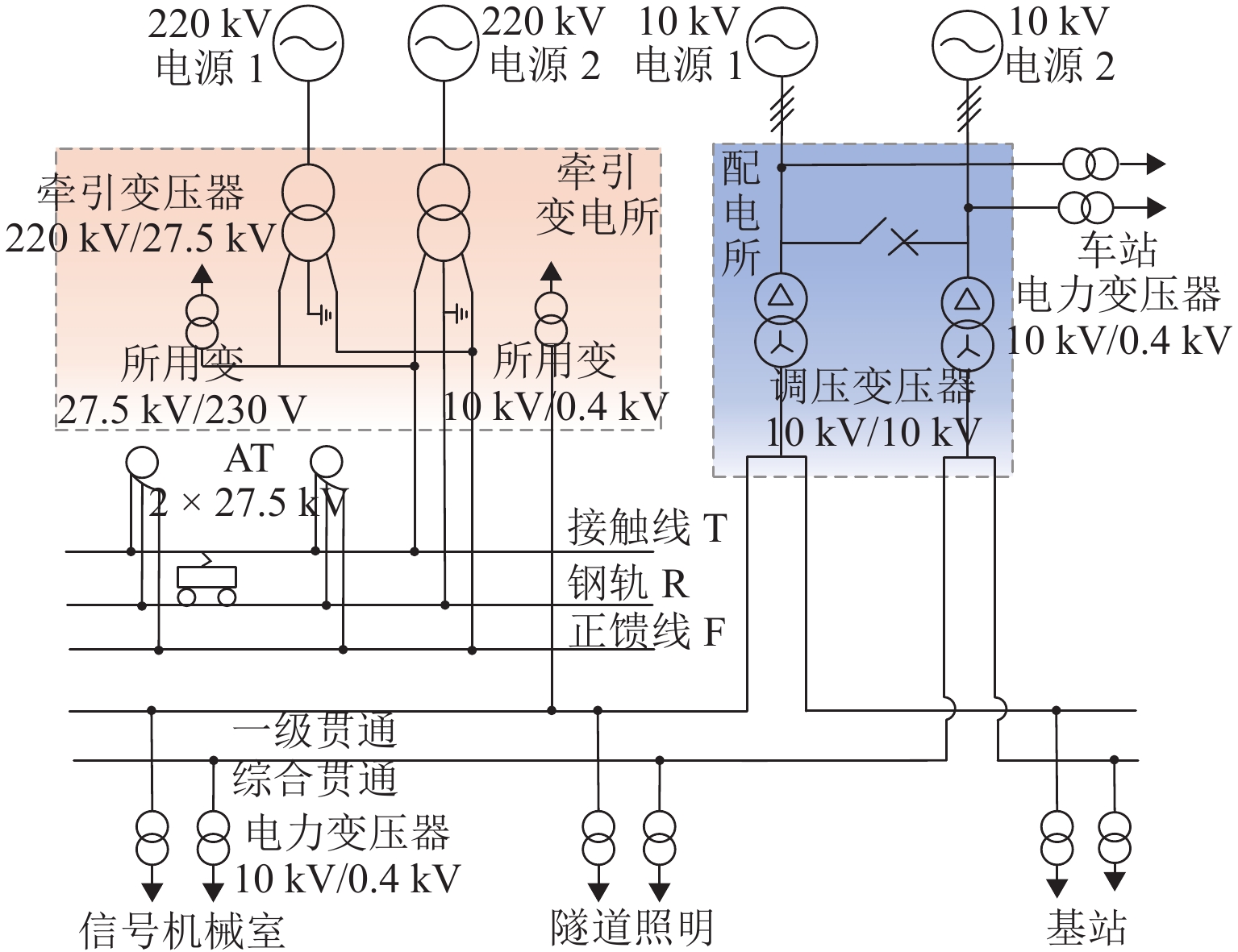
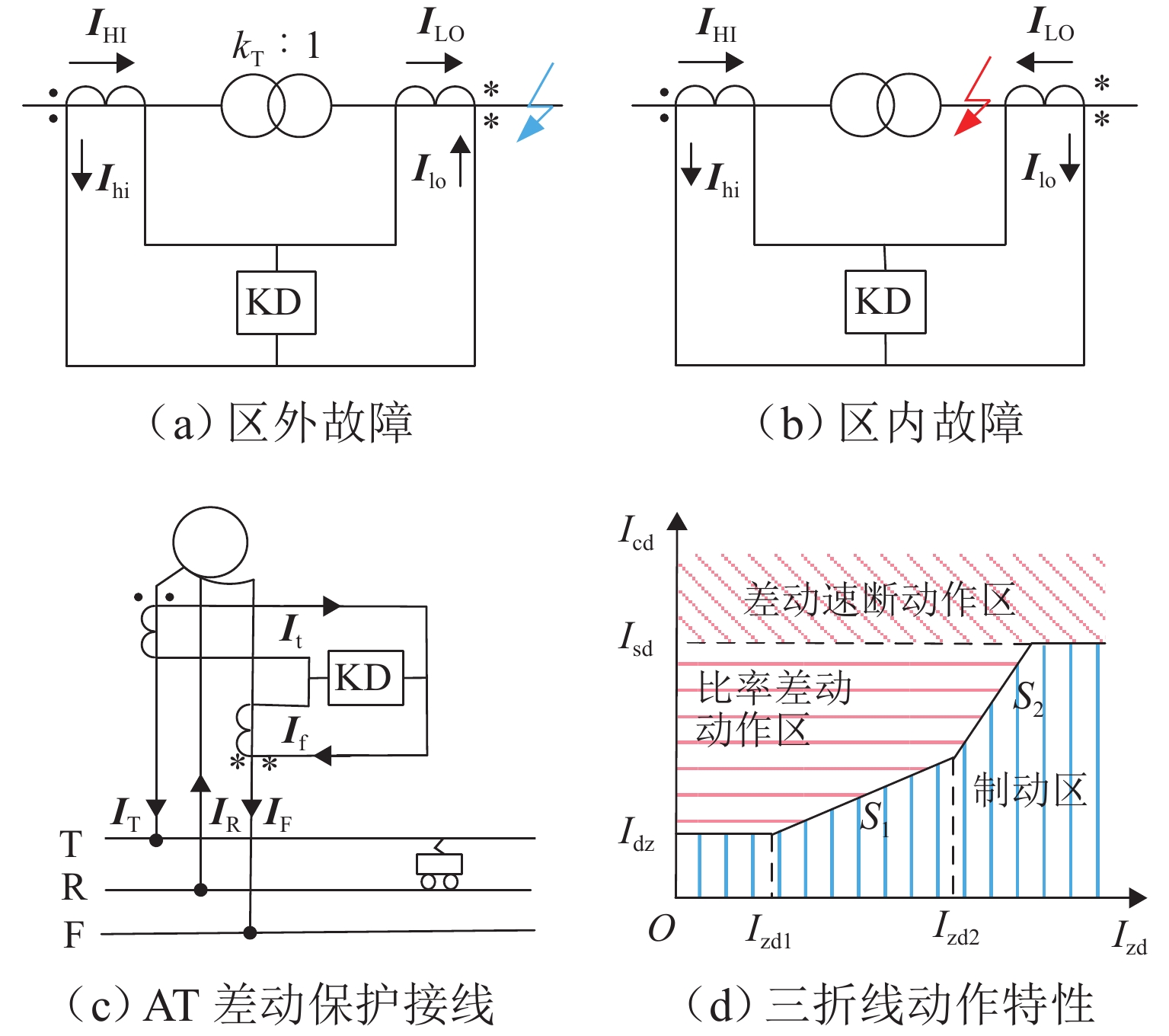
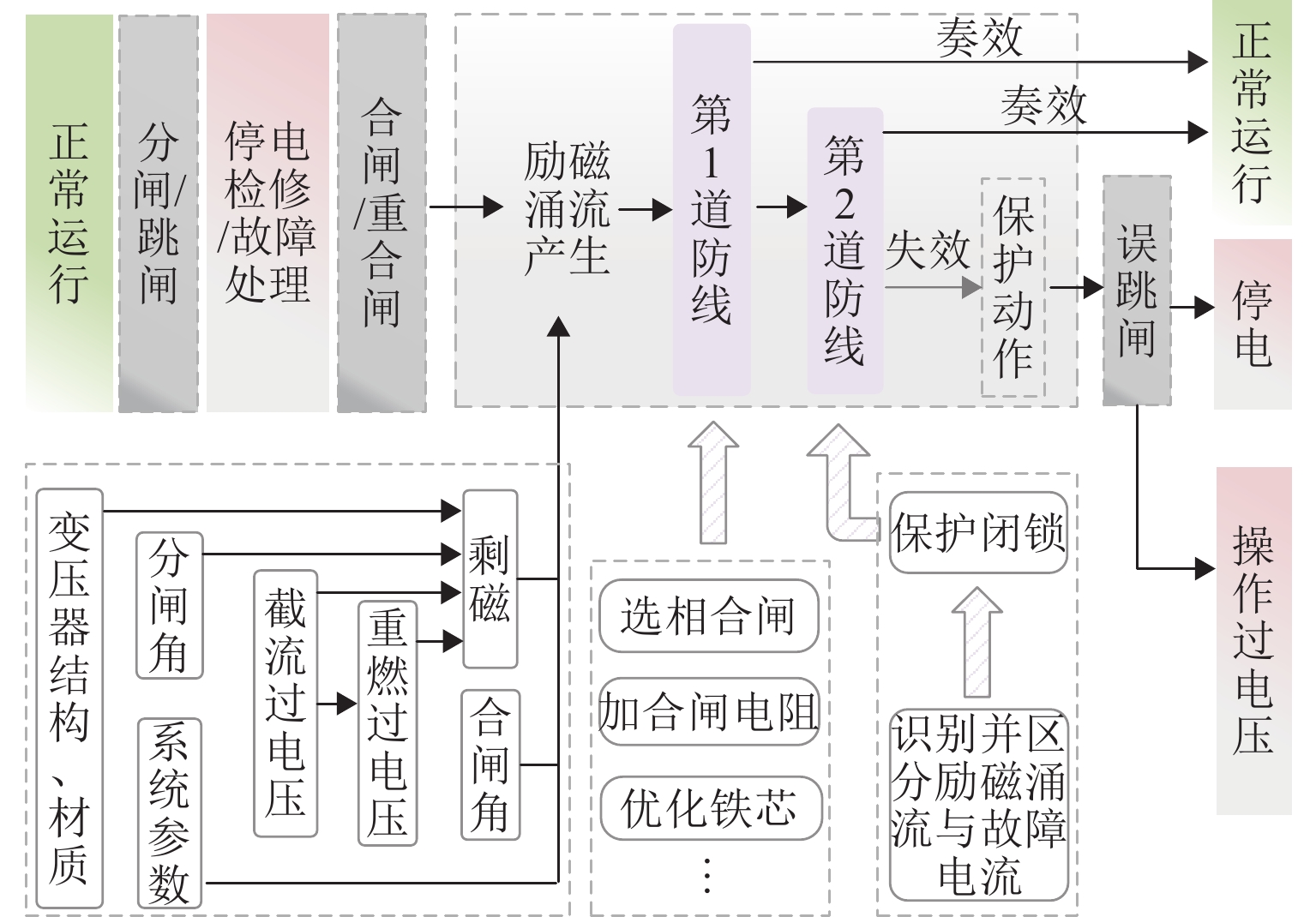
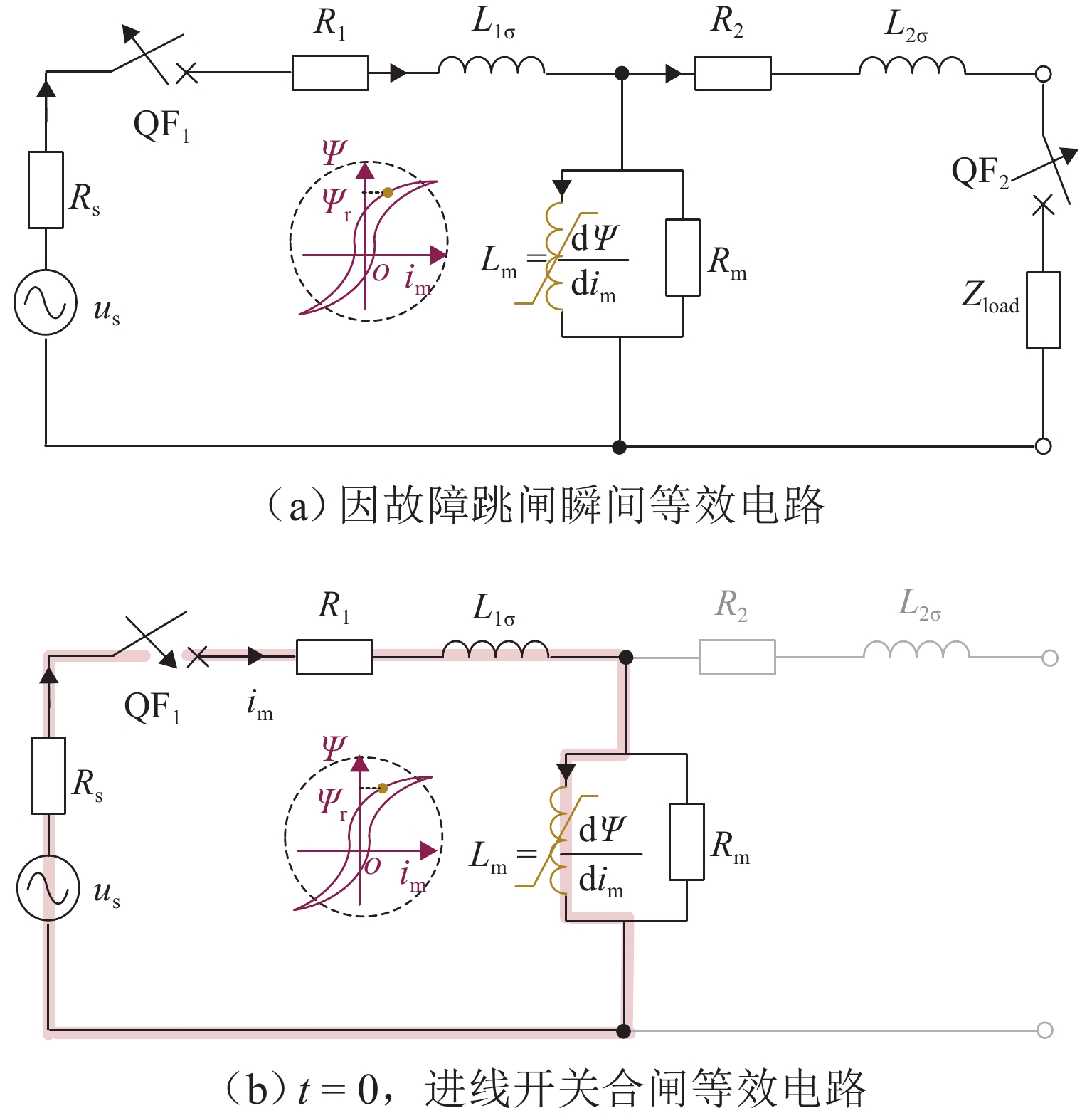
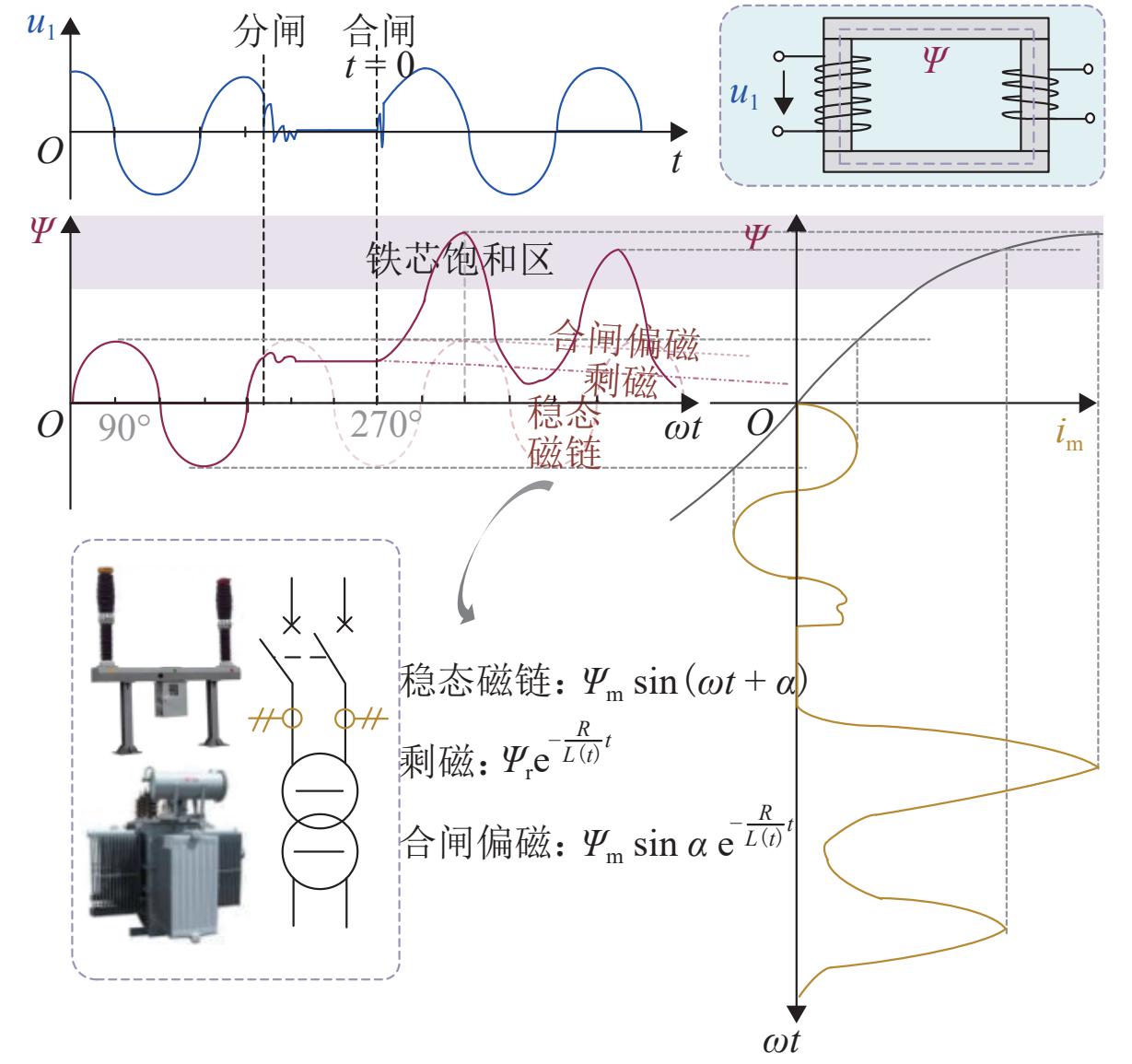
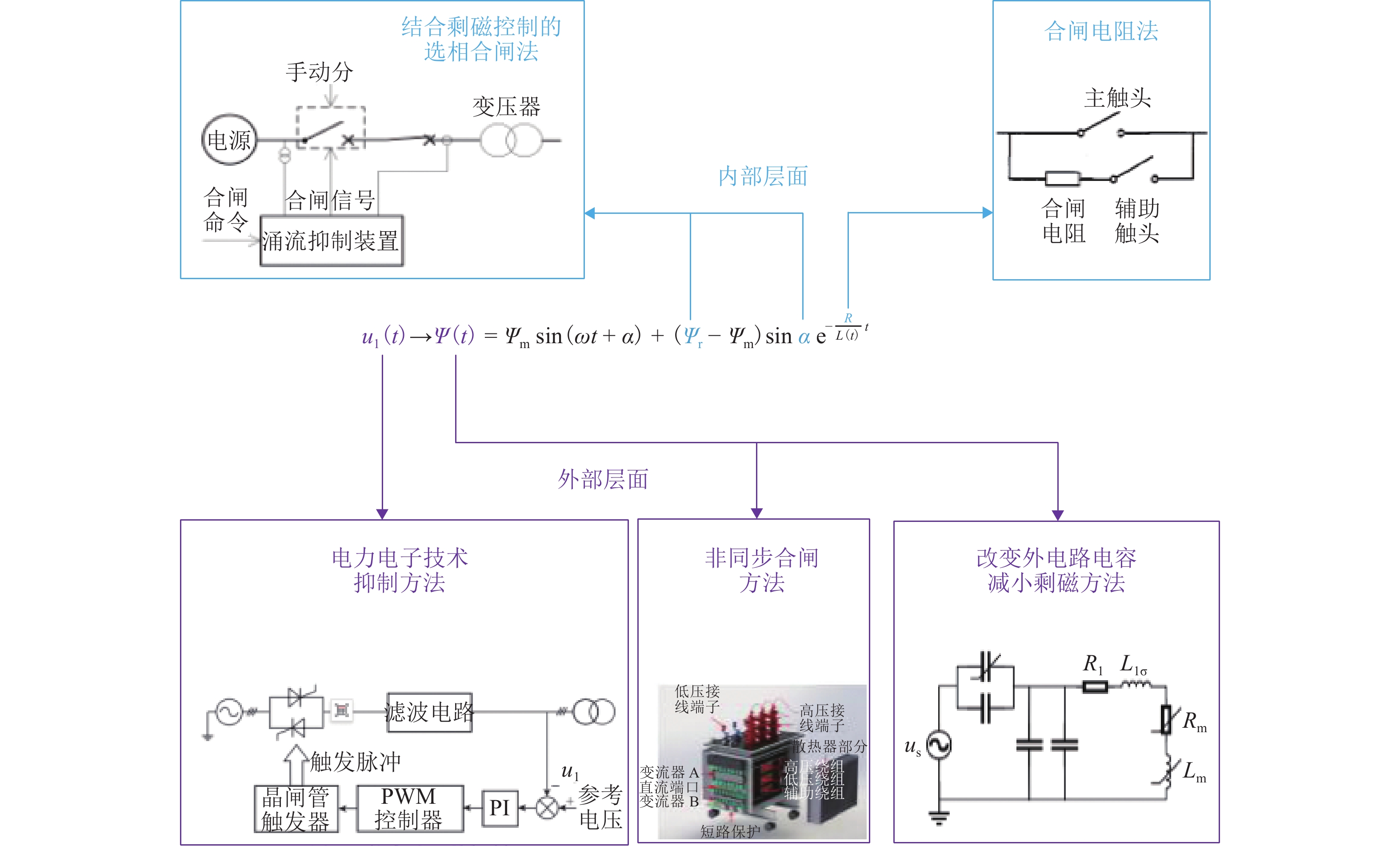
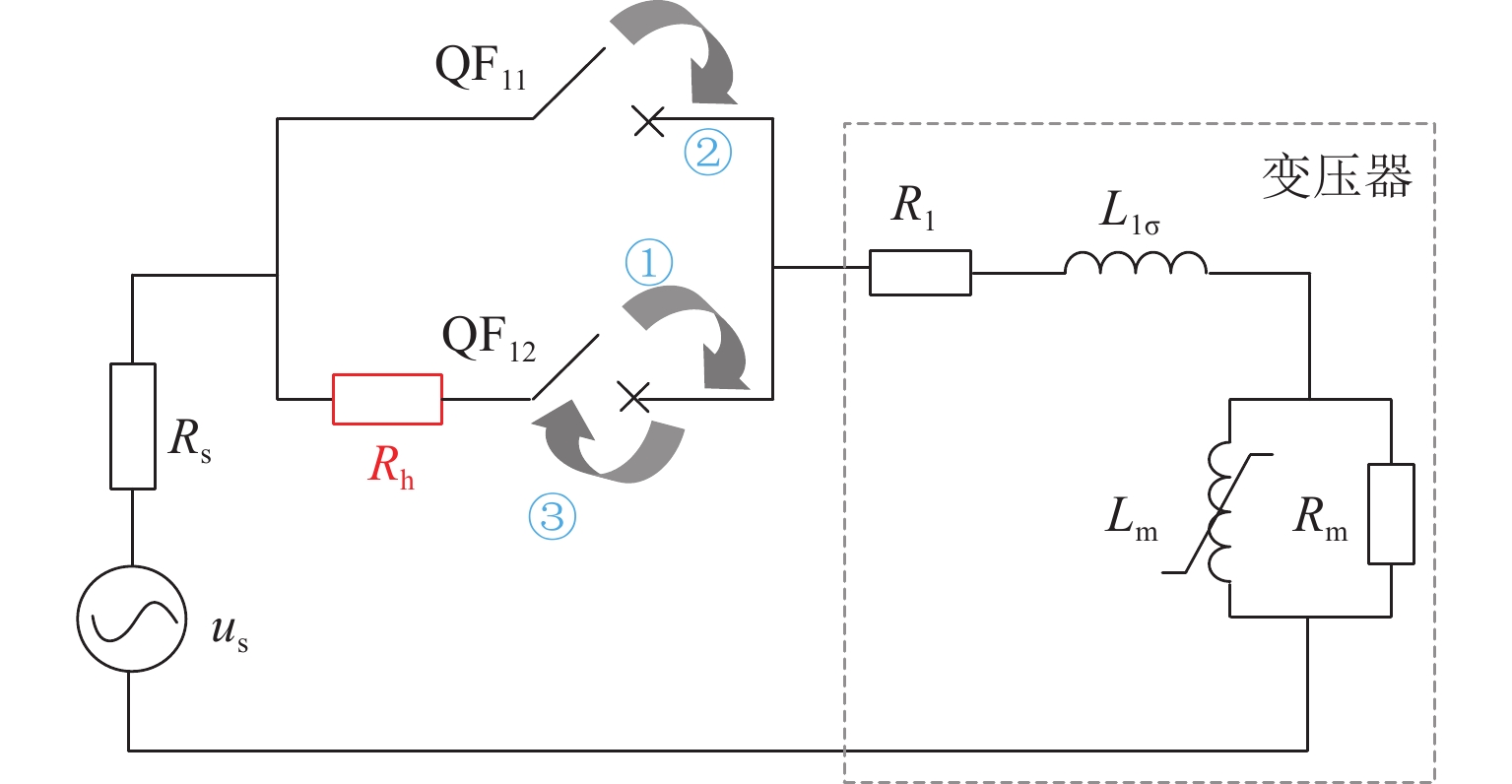
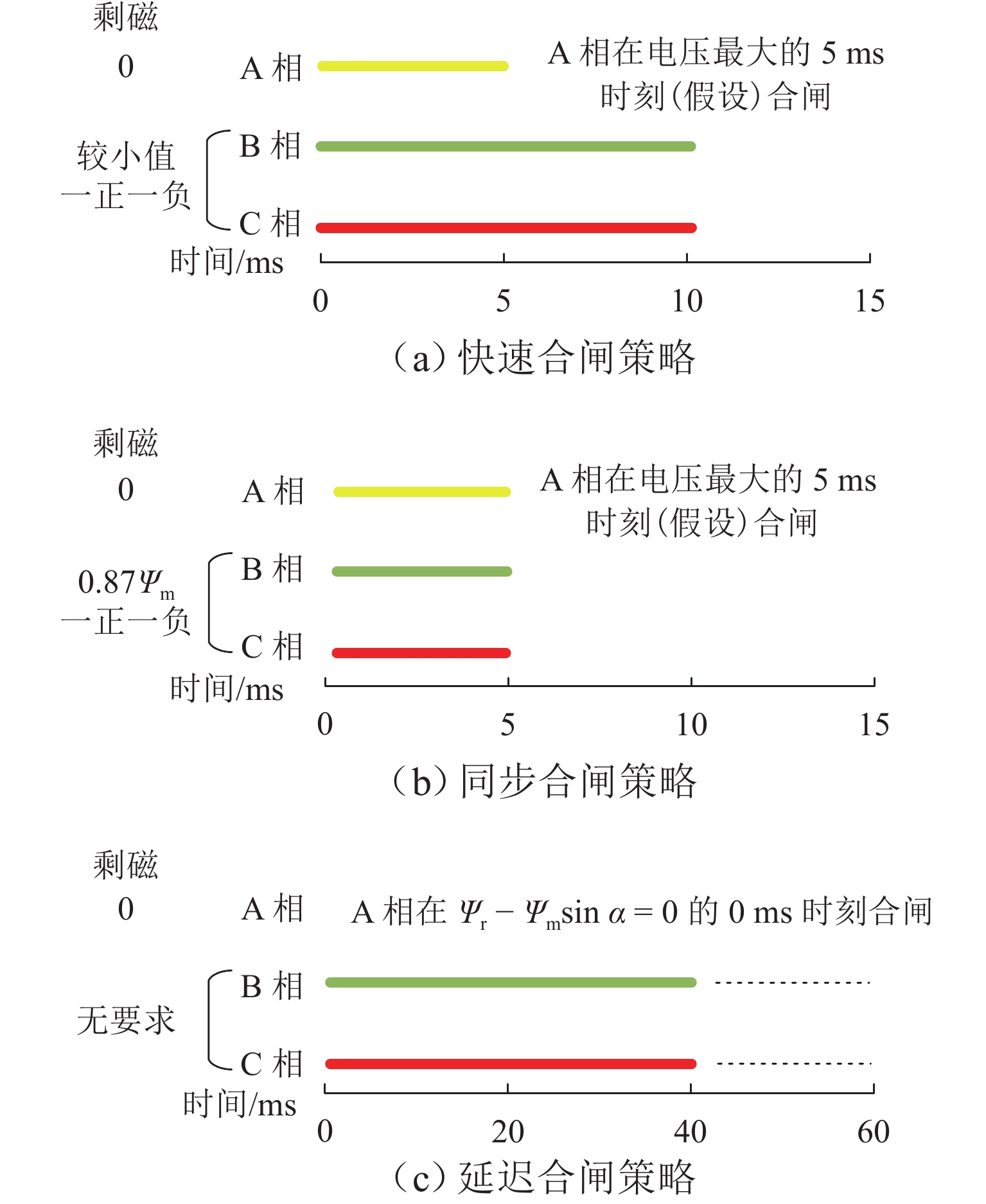
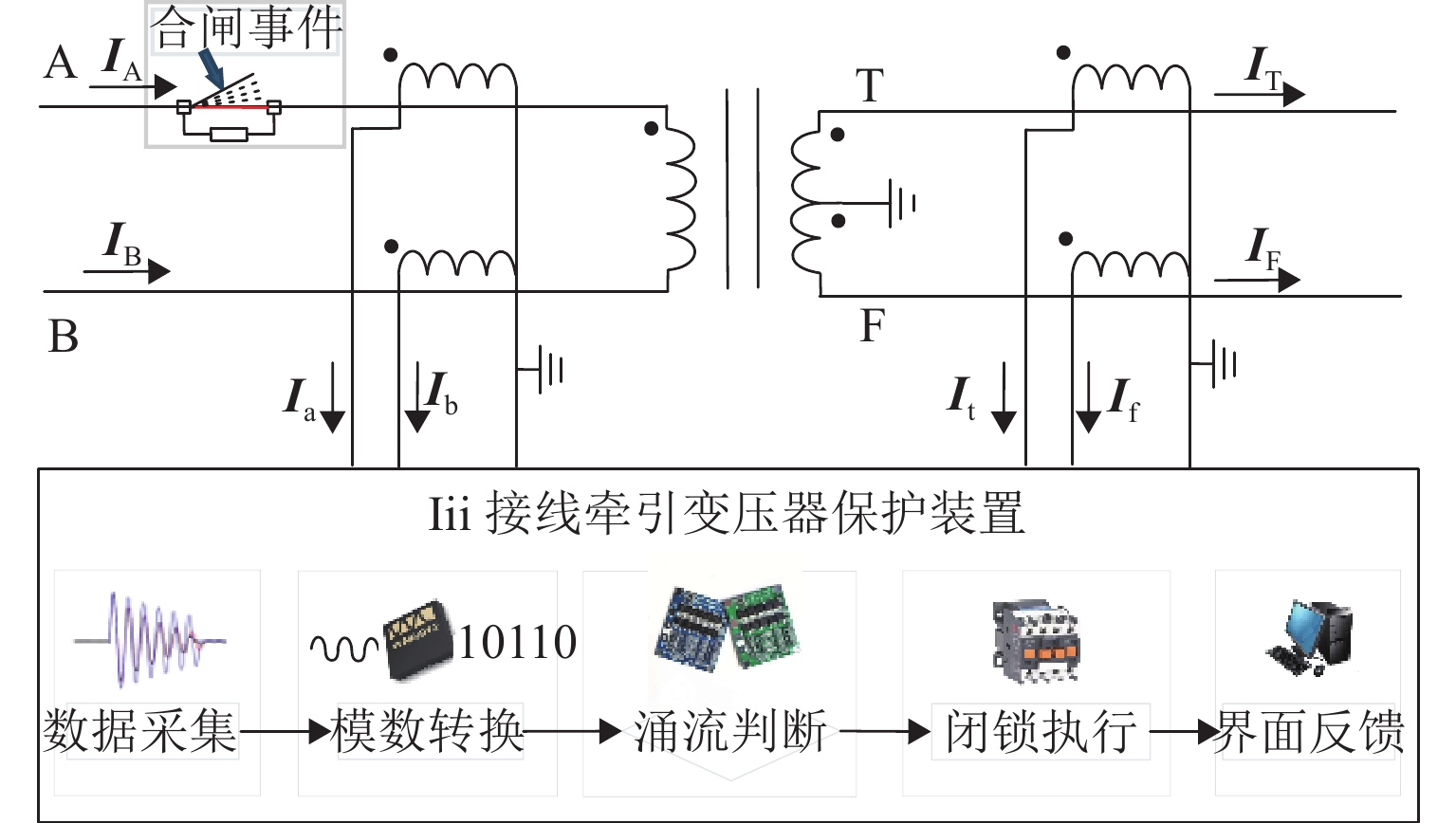
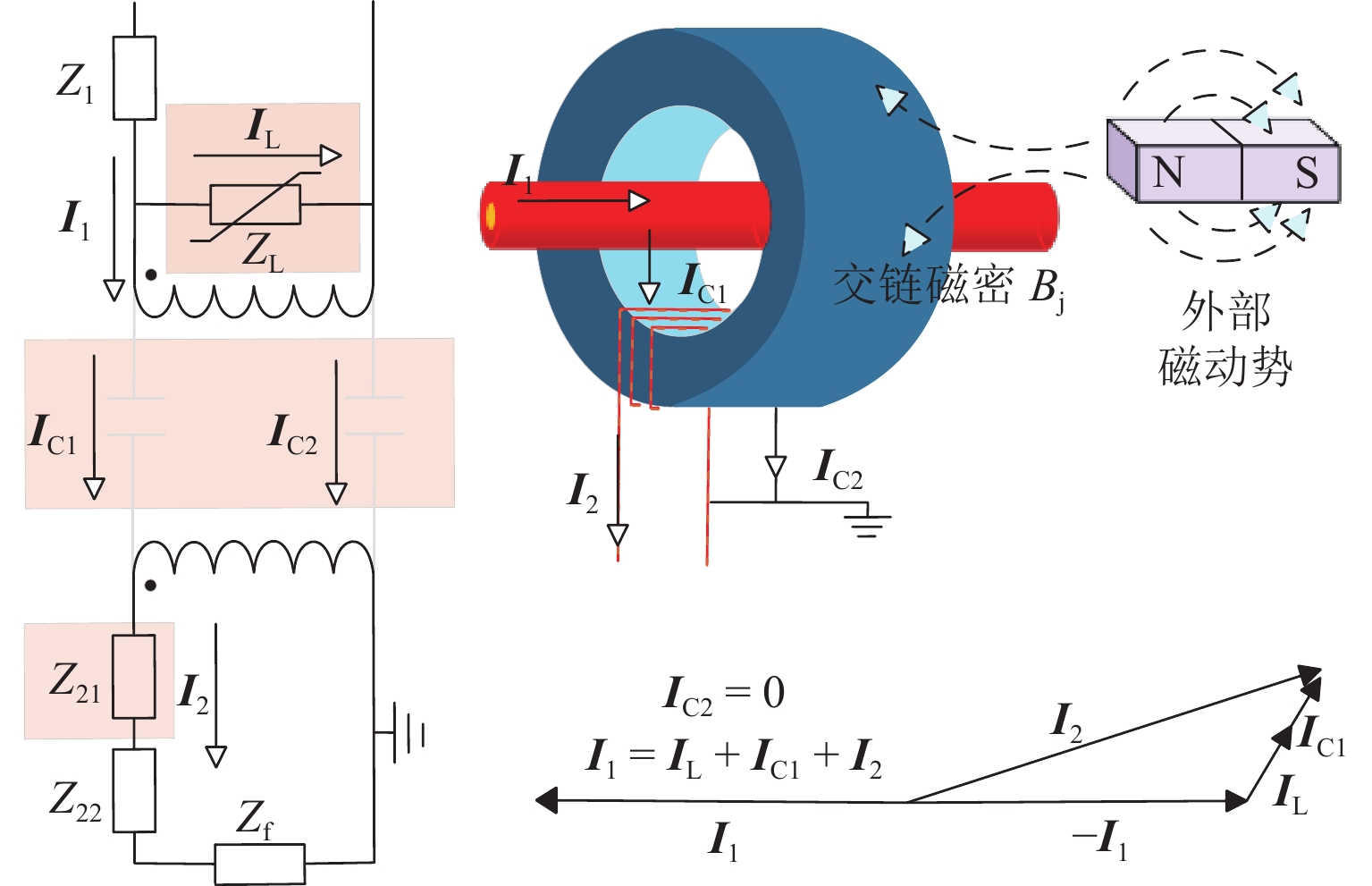
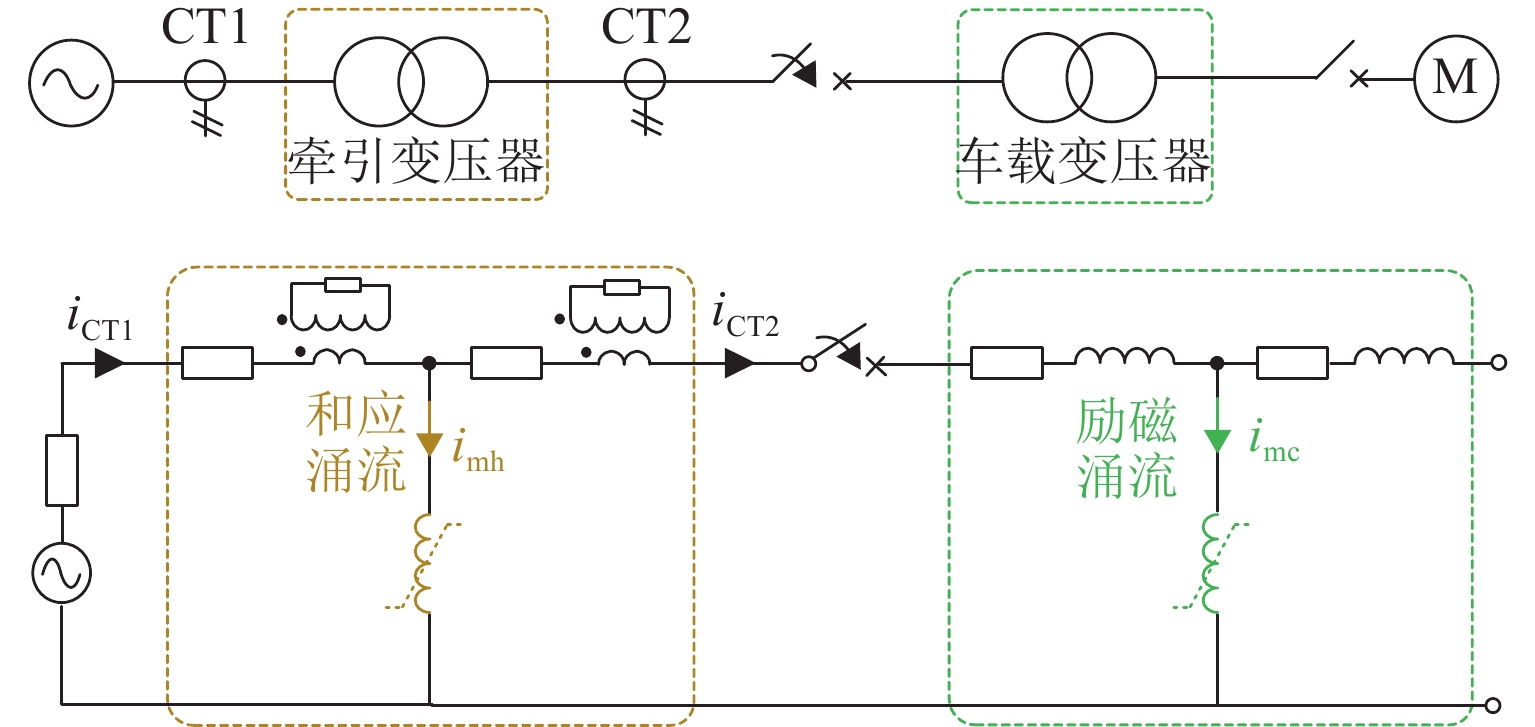
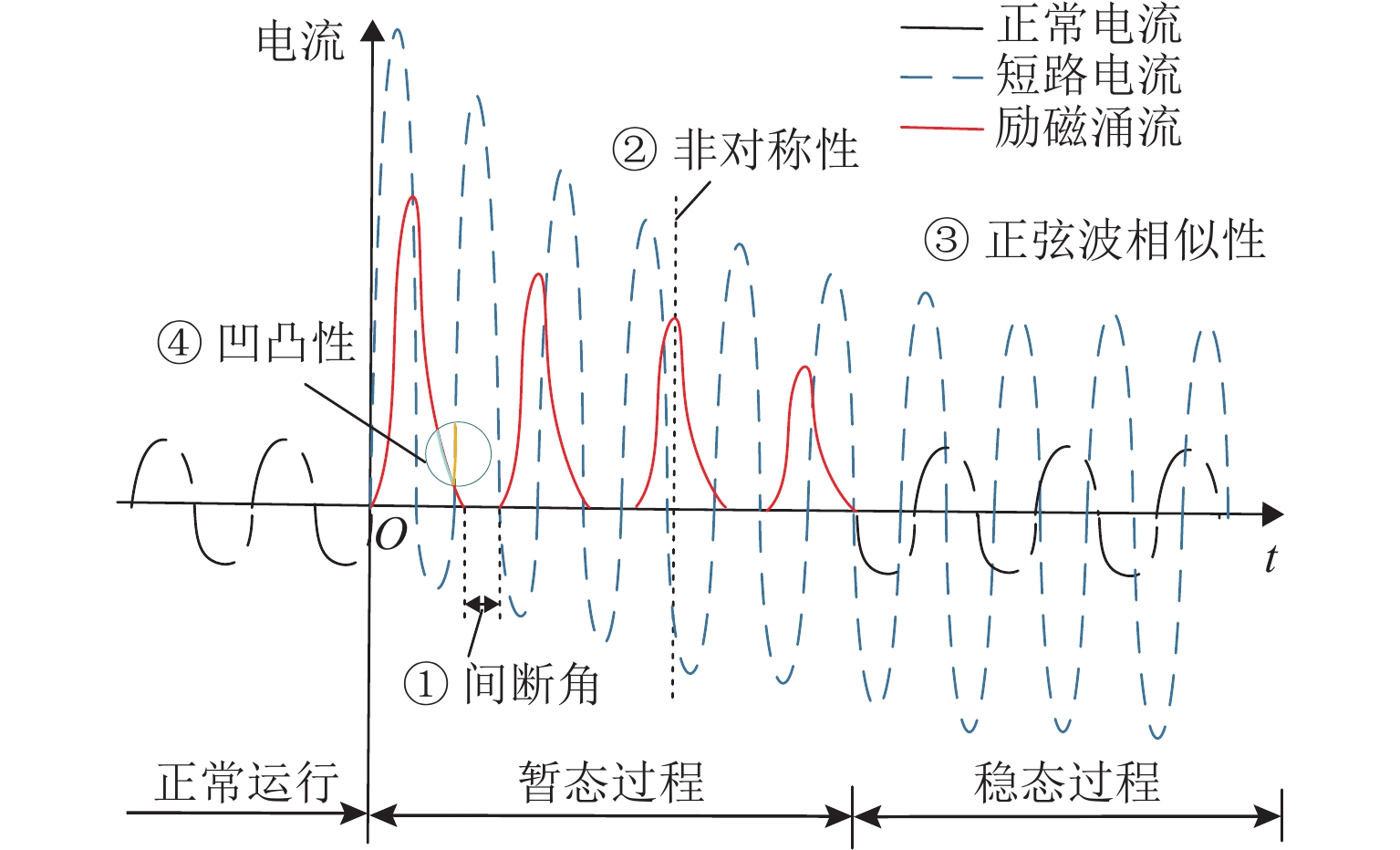
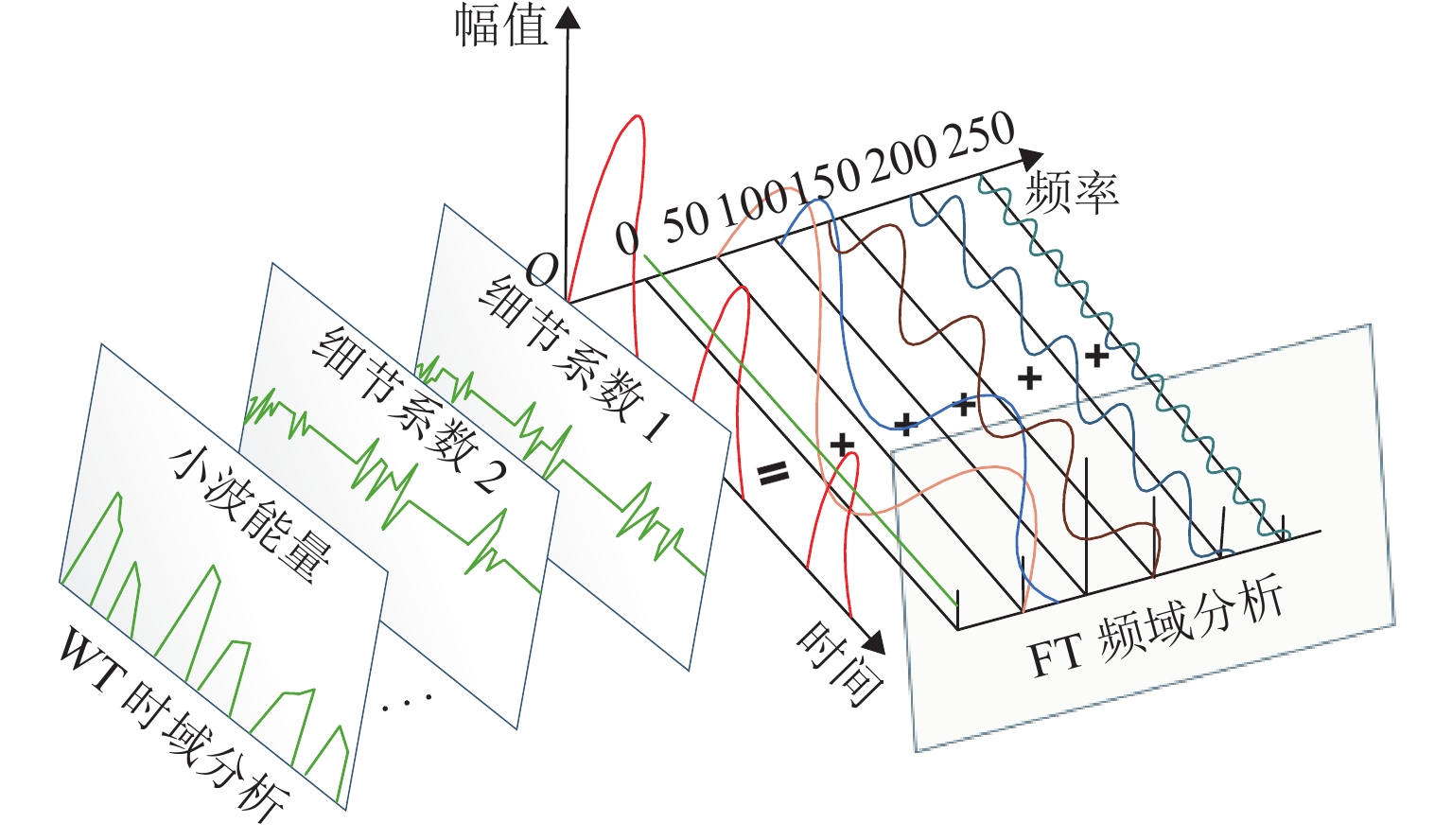
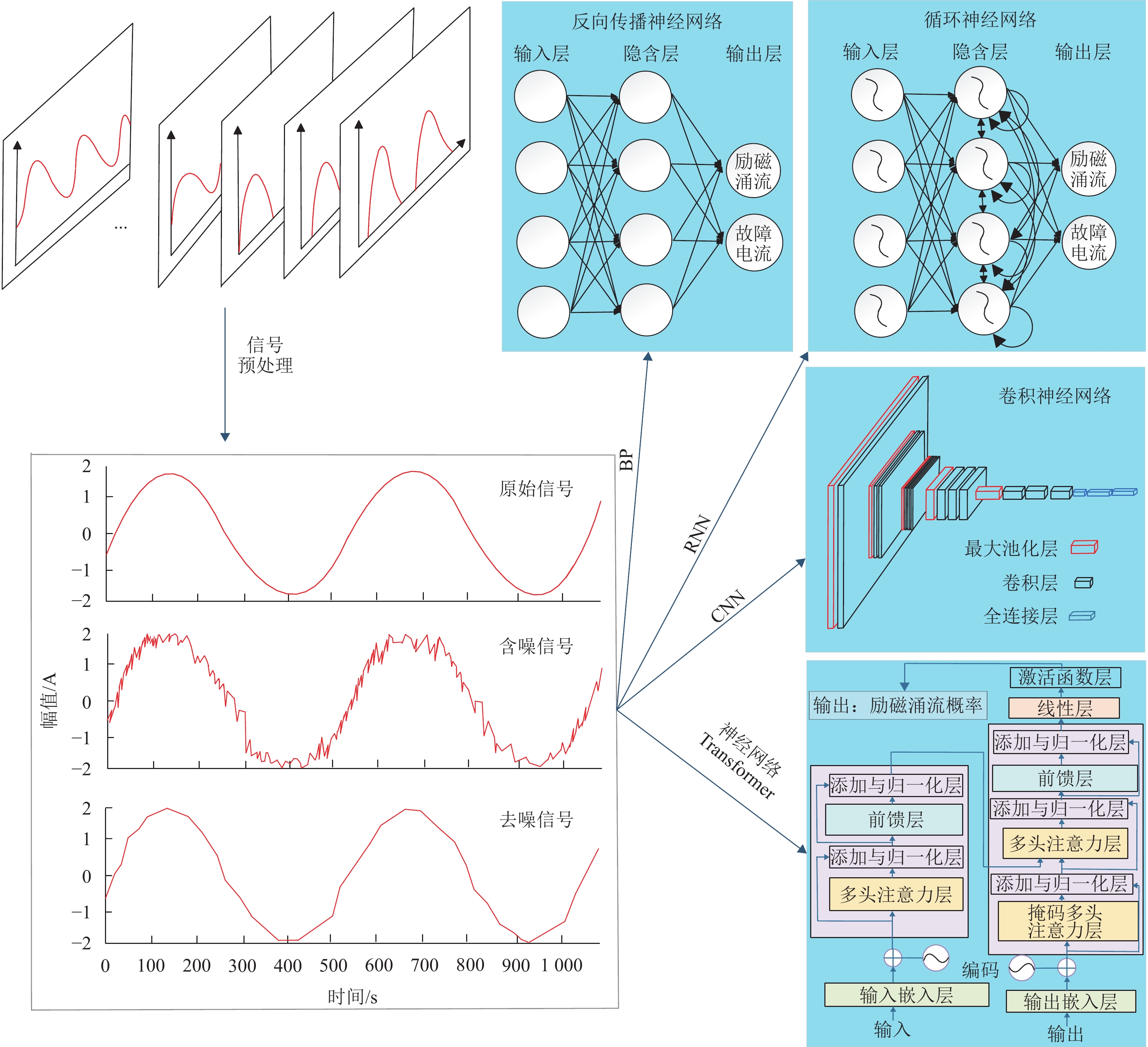
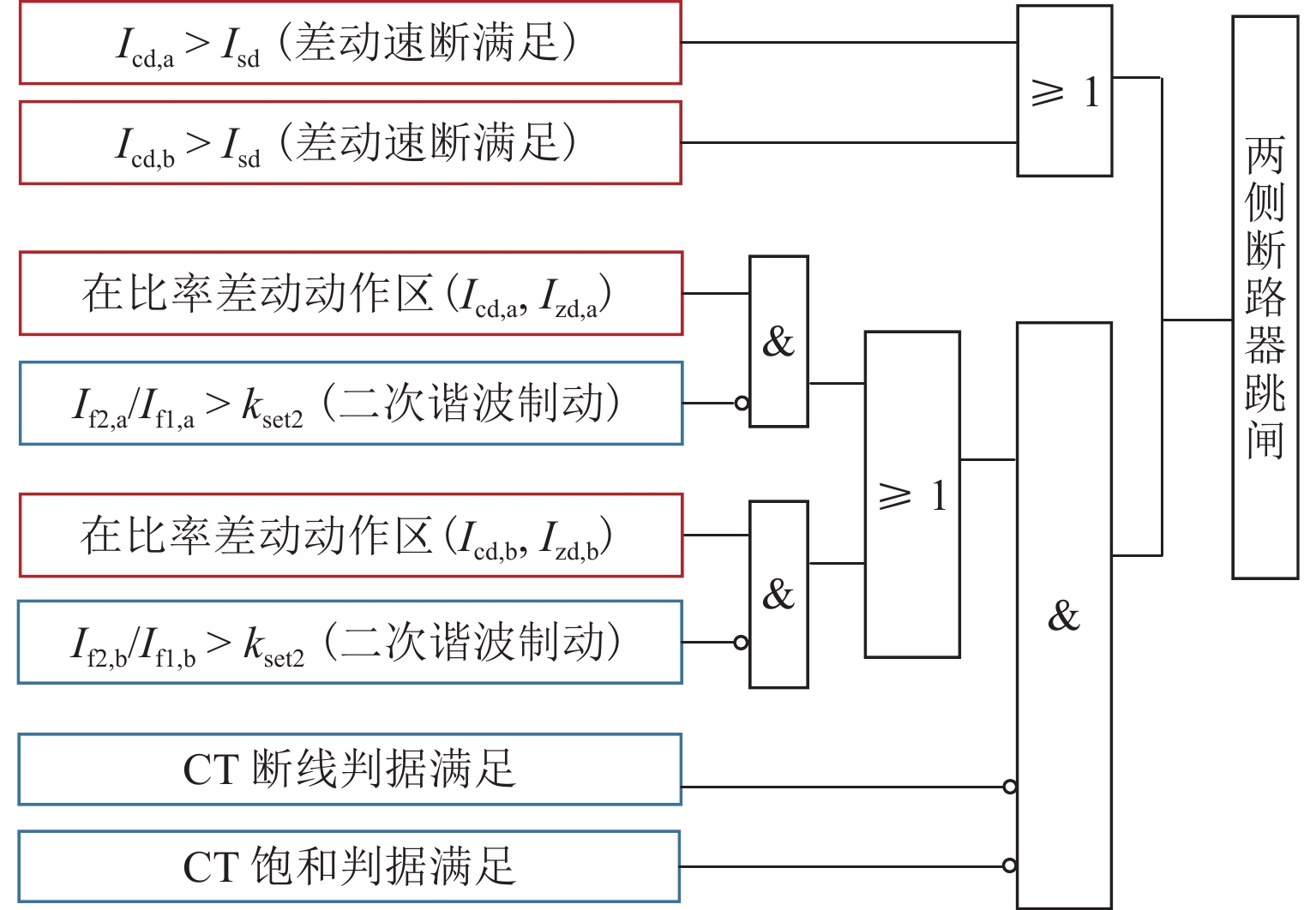
In recent years, incidents of misoperation of relay protection devices caused by excitation inrush current have occurred multiple times when transformers are put into no-load operation by railway departments on site after modification, maintenance, or fault removal, which seriously affects power supply reliability. To ensure the safe and reliable operation of the railway power supply system, based on on-site investigations and comprehensive analysis of extensive literature, the hazards of excitation inrush current to electrical equipment and railway operation in the Chinese railway power supply system were systematically analyzed. Meanwhile, based on the electromagnetic equivalent model of transformers, a qualitative analysis of the formation causes of excitation inrush current was conducted, pointing out that residual magnetism and closing bias magnetism are the main factors affecting the magnitude of excitation inrush current. In addition, the current research status of Chinese and international scholars on suppressing excitation inrush current by coordinating residual magnetism and closing time, as well as adding external electrical components, was introduced, and the research progress of excitation inrush current waveform recognition technologies, such as the waveform feature method, time-frequency domain analysis method, and neural network method, was summarized. Finally, multi-scenario and full-characteristic transient simulation of excitation inrush current, the research and development and application of high-performance new materials and new structures for transformers, as well as waveform recognition technology based on new neural networks and its protection coordination measures were prospected, which were considered as key areas for future research.
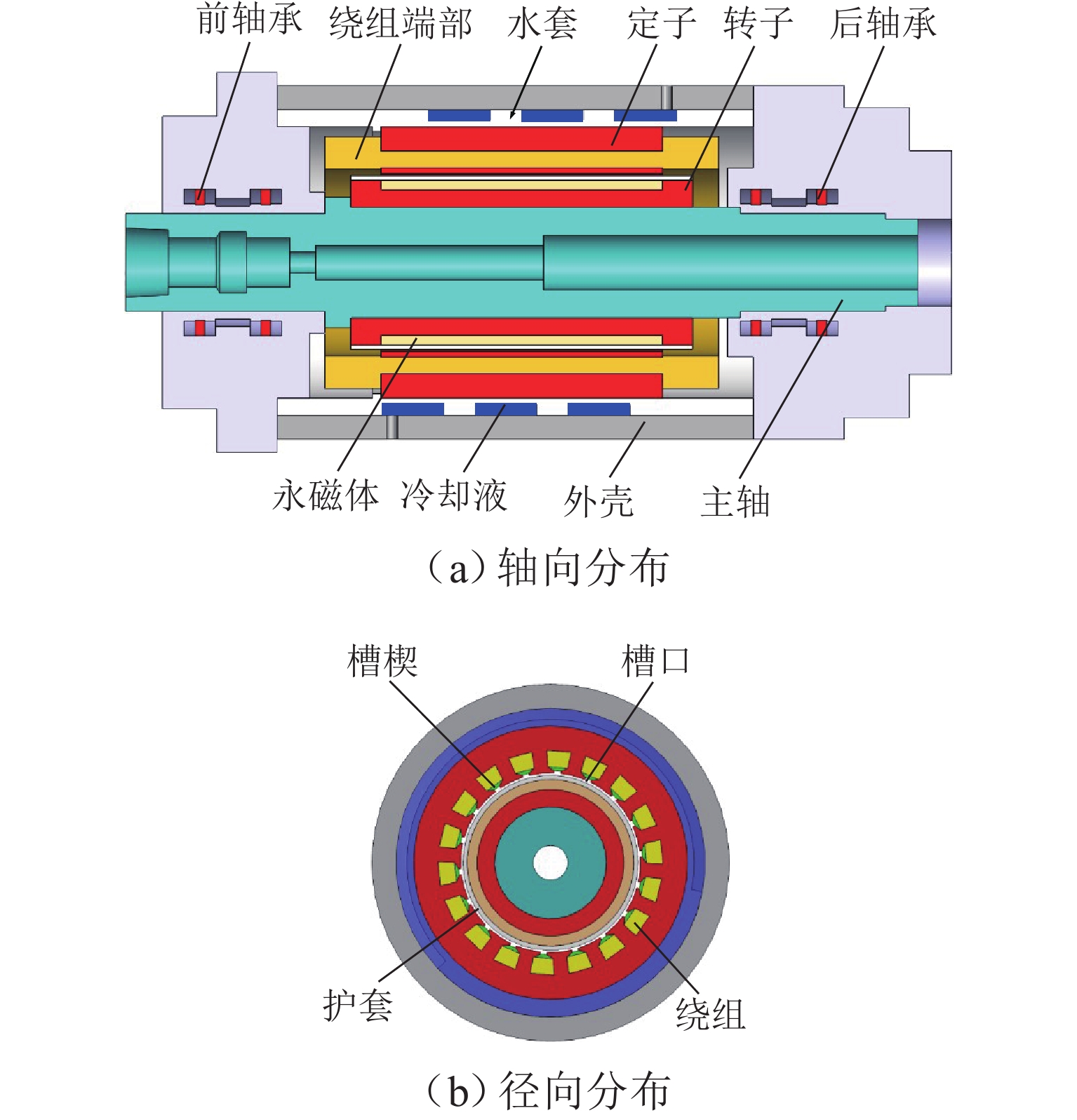
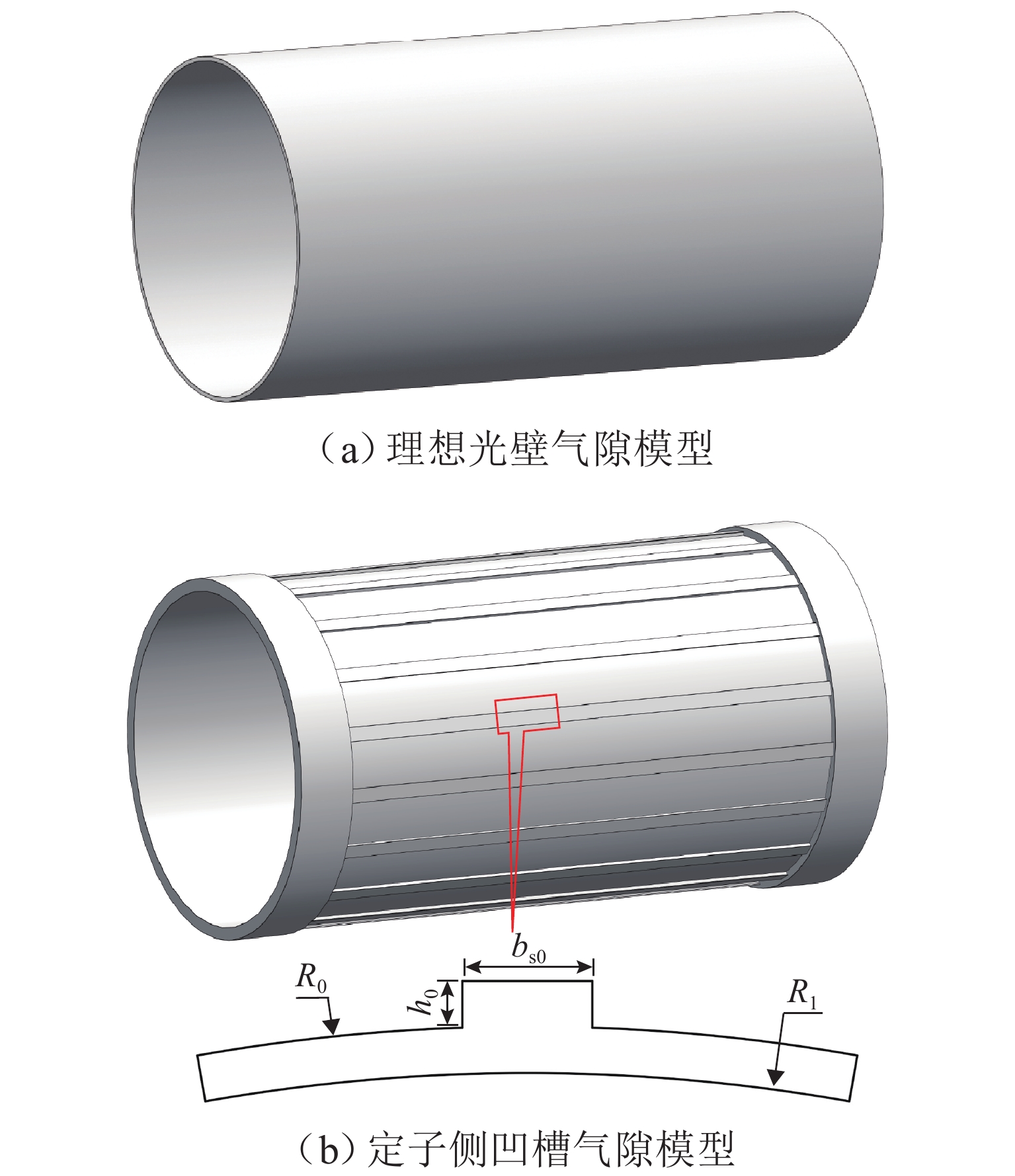
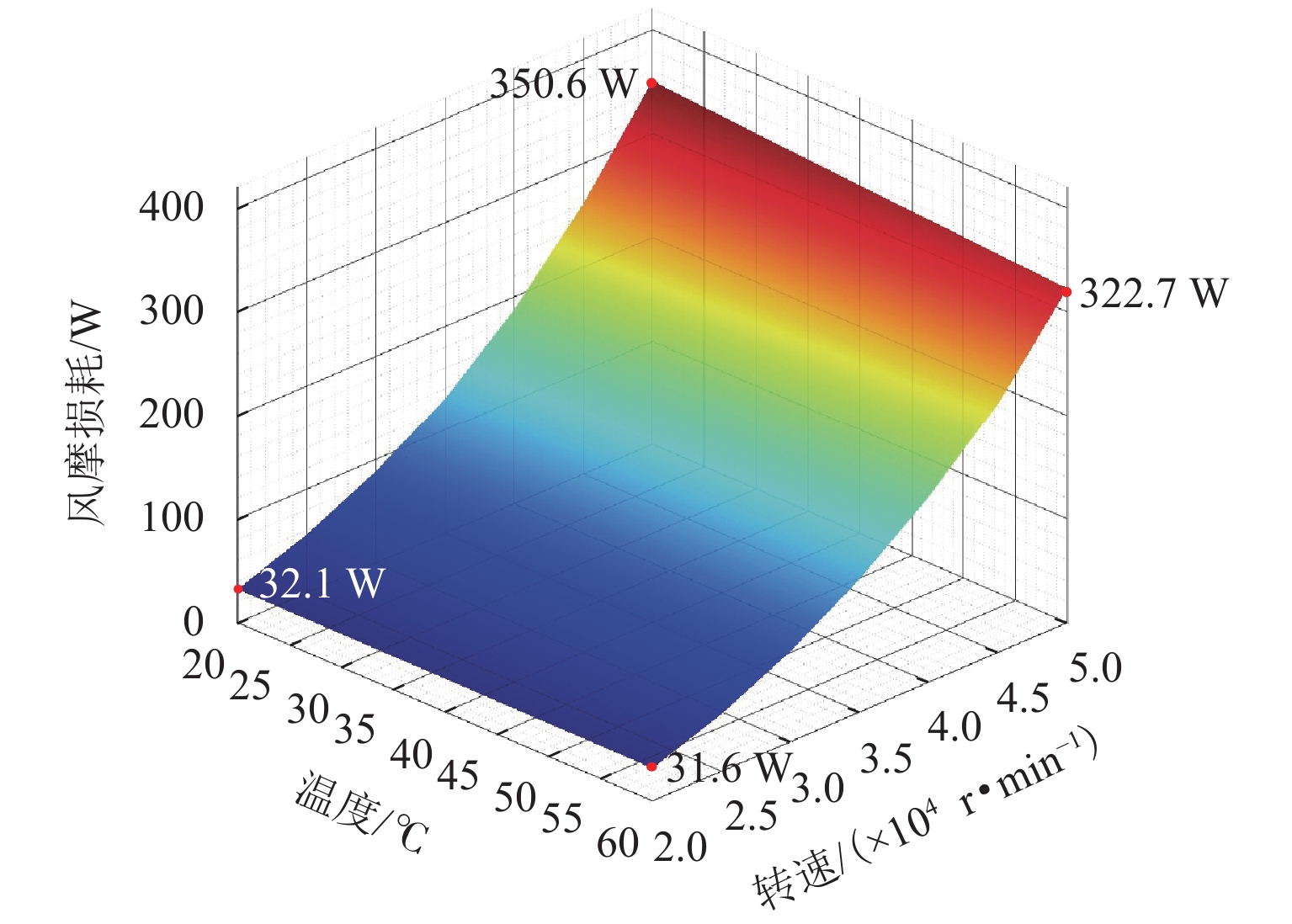
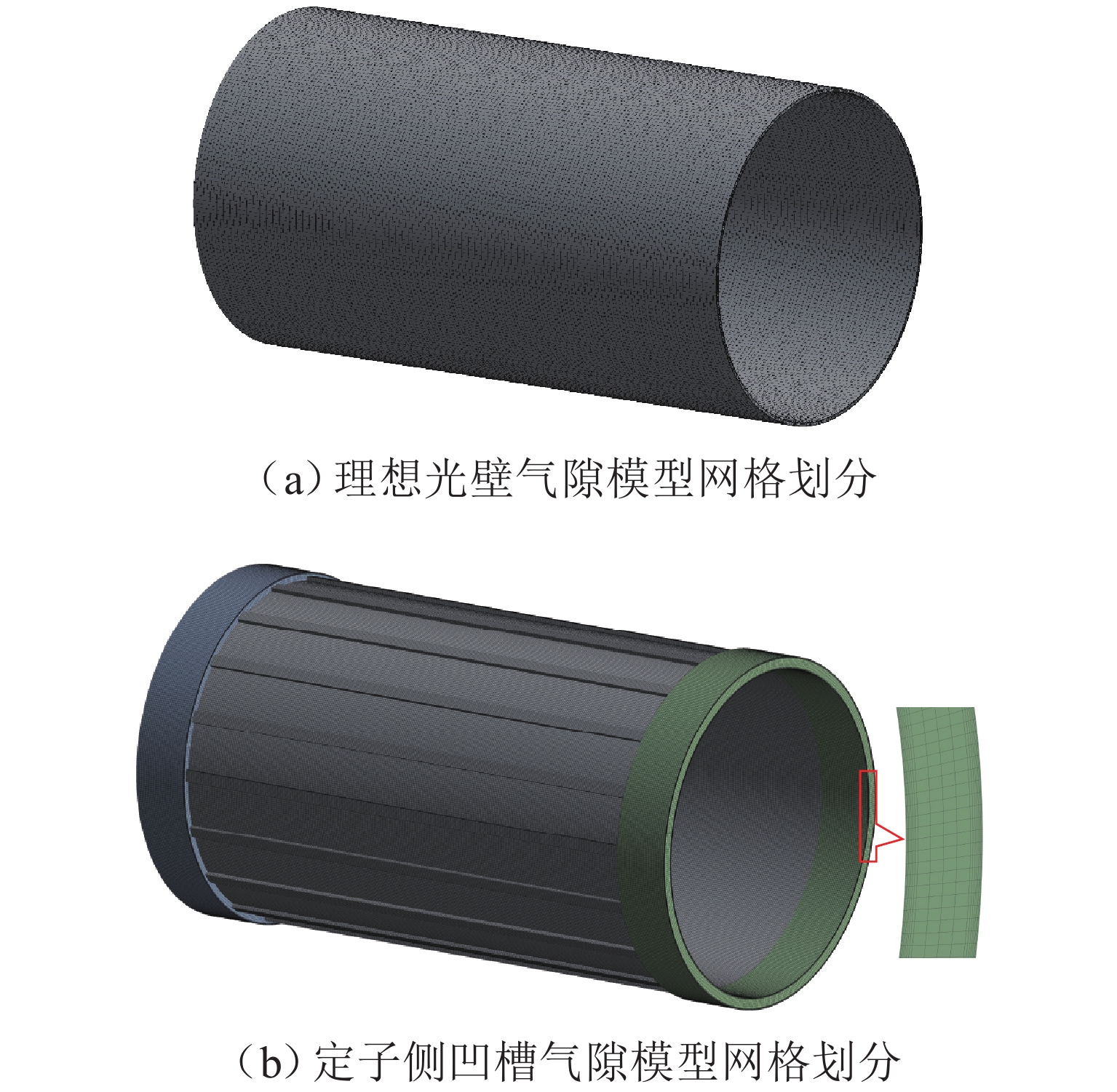
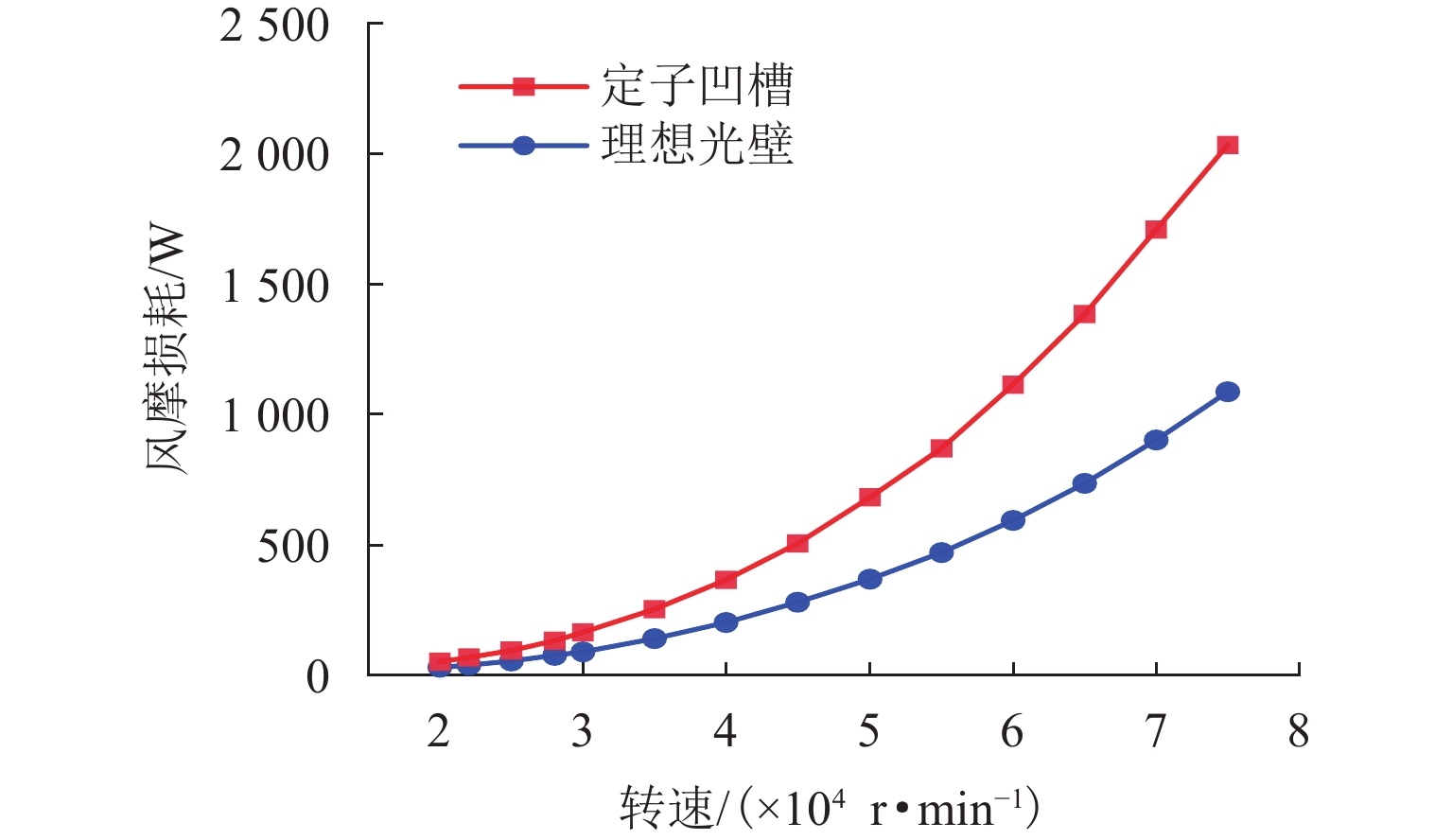
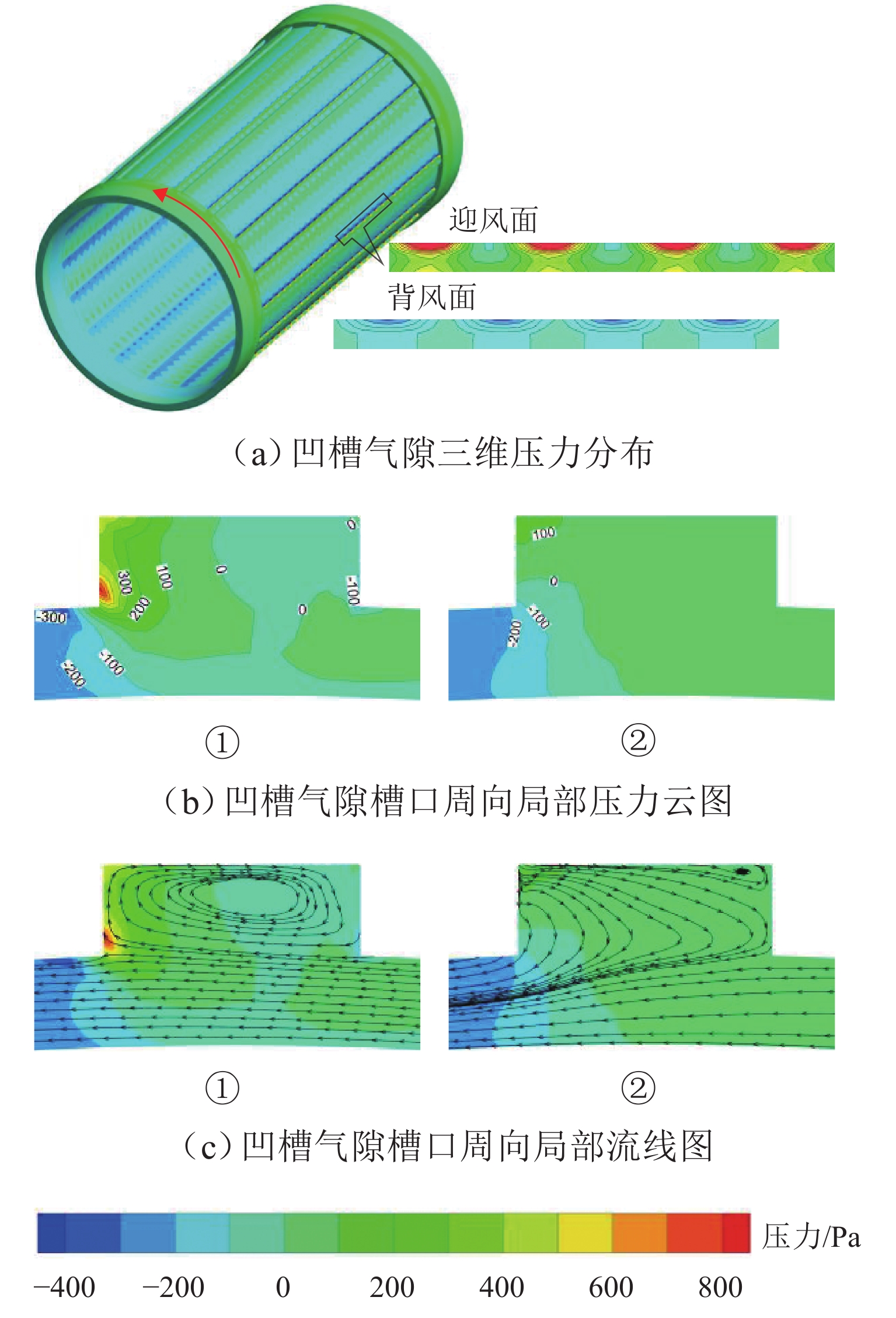
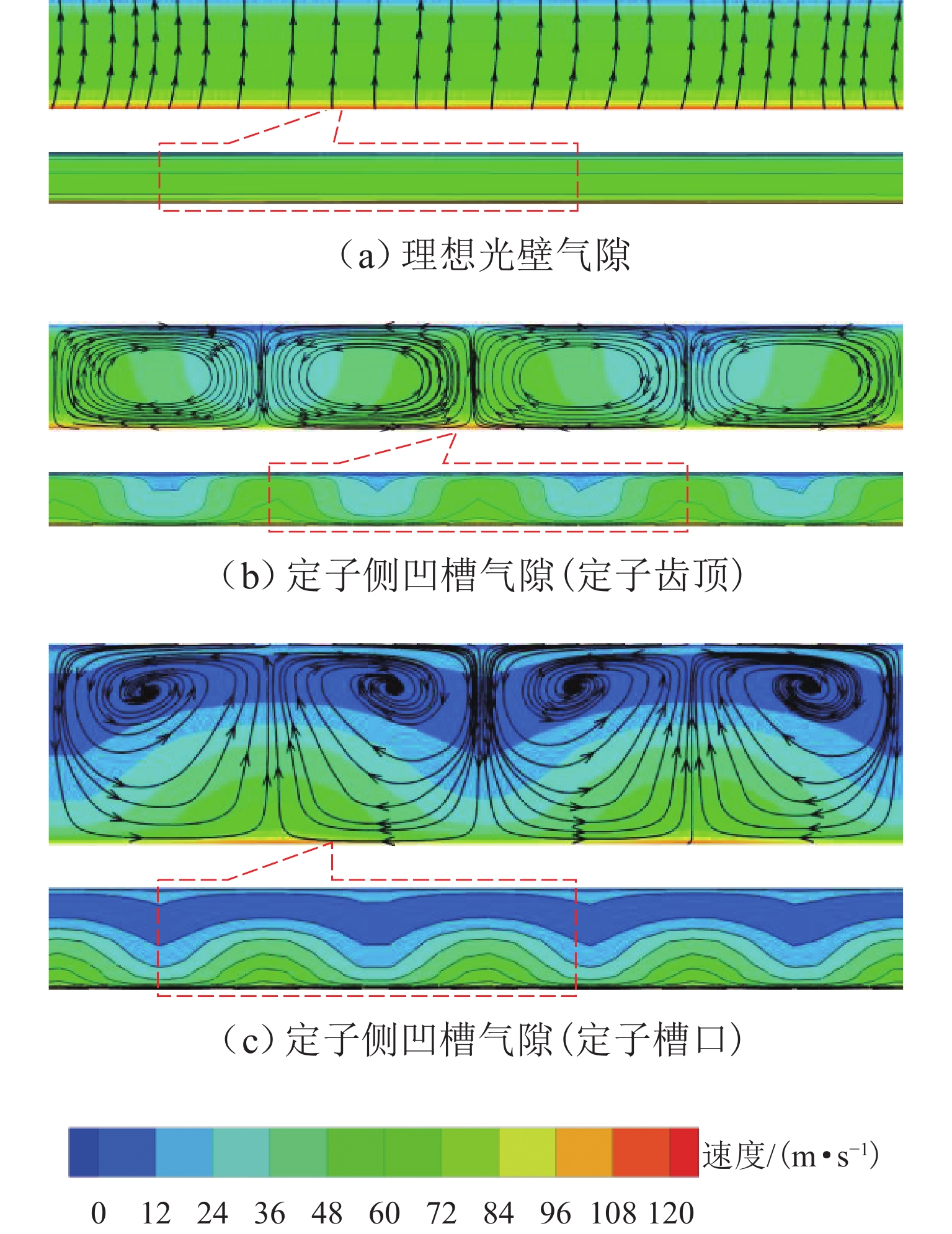
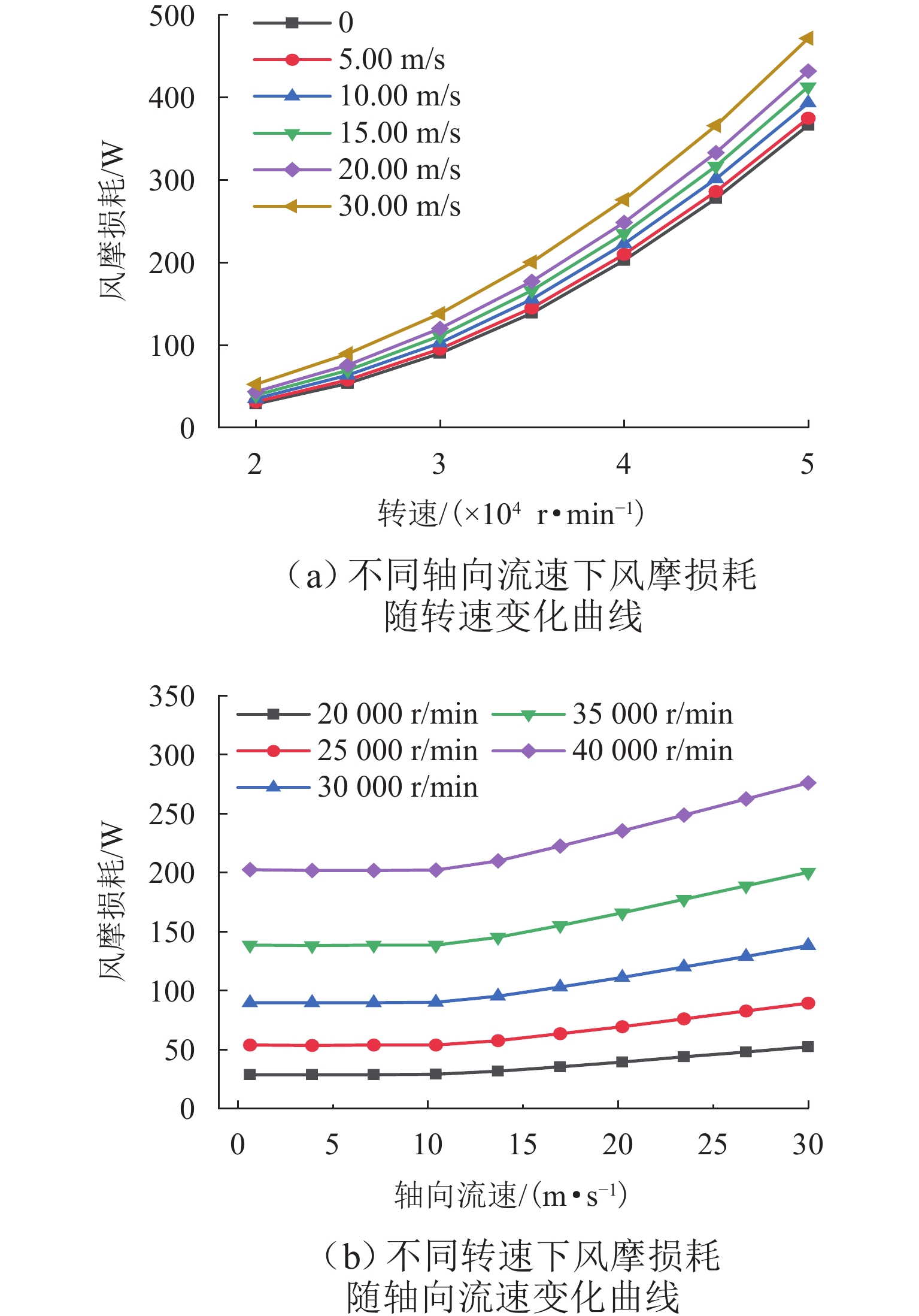
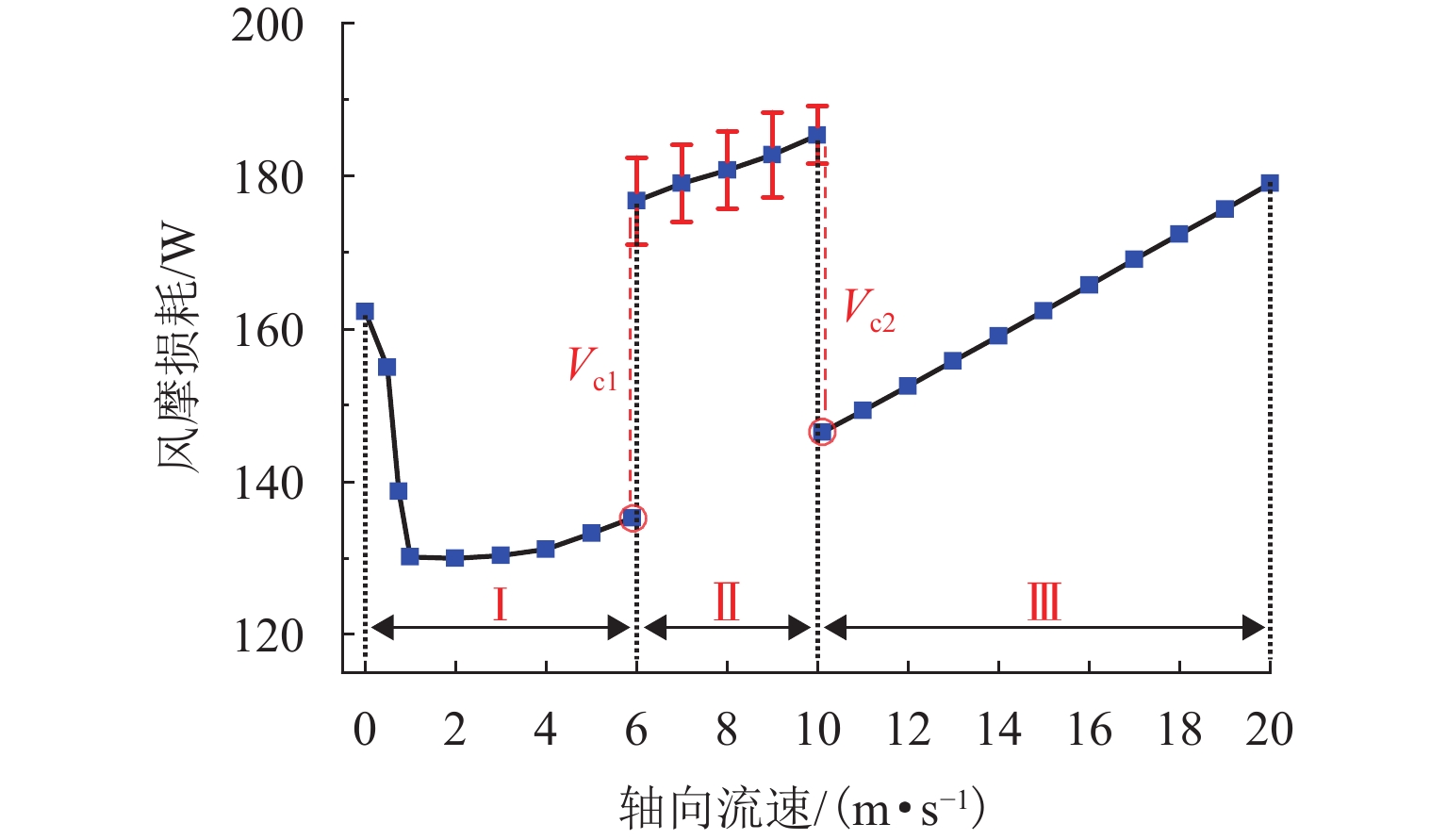
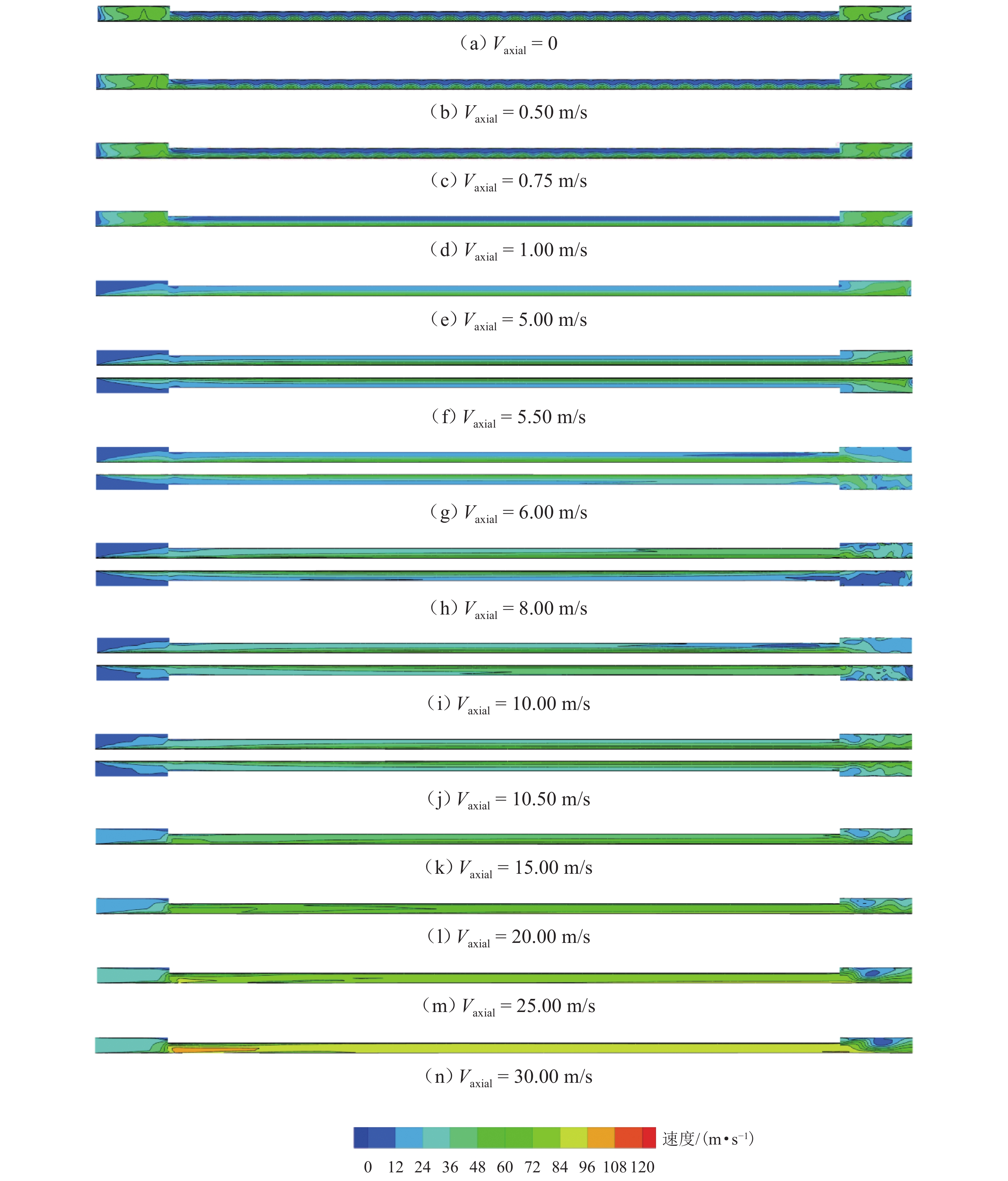
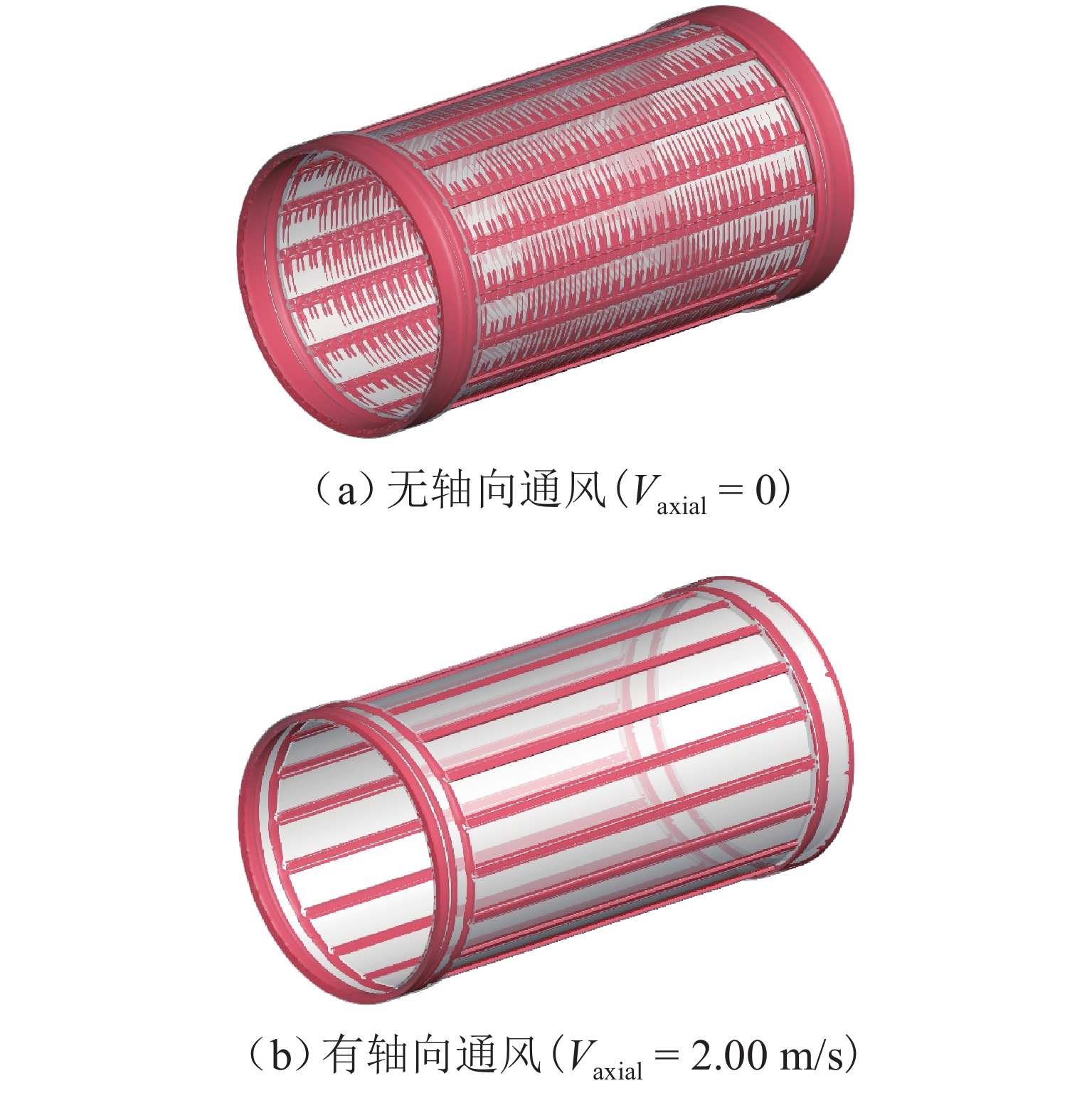
To address the design challenges of heat dissipation and energy efficiency caused by air friction loss in the air gap of high-speed permanent magnet motorized spindles, the formation mechanism of windage loss and the evolution laws of vortex flow under the coupled effect of stator slots and axial ventilation cooling were revealed. First, an ideal air-gap model with smooth walls and a realistic air-gap model containing 18 stator slots were established, respectively. Second, the independent impact of stator slots was quantitatively evaluated by comparing the energy dissipation differences between the two air-gap models under the condition of no axial ventilation. Finally, the nonlinear regulation effect of ventilation intensity on the internal flow field structure and energy dissipation characteristics of the air gap was systematically evaluated by applying axial cooling airflows at different velocities. The results indicate: 1) stator slots are the decisive factor leading to the surge of windage loss. Compared with the ideal air gap with smooth walls, the increase in additional loss caused by stator slots is nearly 80%. 2) In the air gap containing stator slots, the regulation of loss by axial ventilation exhibits significant non-monotonic and multi-stage characteristics: After weak axial ventilation is introduced, the loss decreases to the minimum at 2.00 m/s, with a decrease of more than 19%; when the flow velocity enters the critical range of 6.00–10.00 m/s, the flow field instability leads to a sharp surge in energy dissipation by over 26%; when the flow velocity exceeds 10.00 m/s, the vortex suppression effect dominates the flow field to restore stability, and the energy dissipation shows a steady and monotonic increasing trend after a sudden drop.
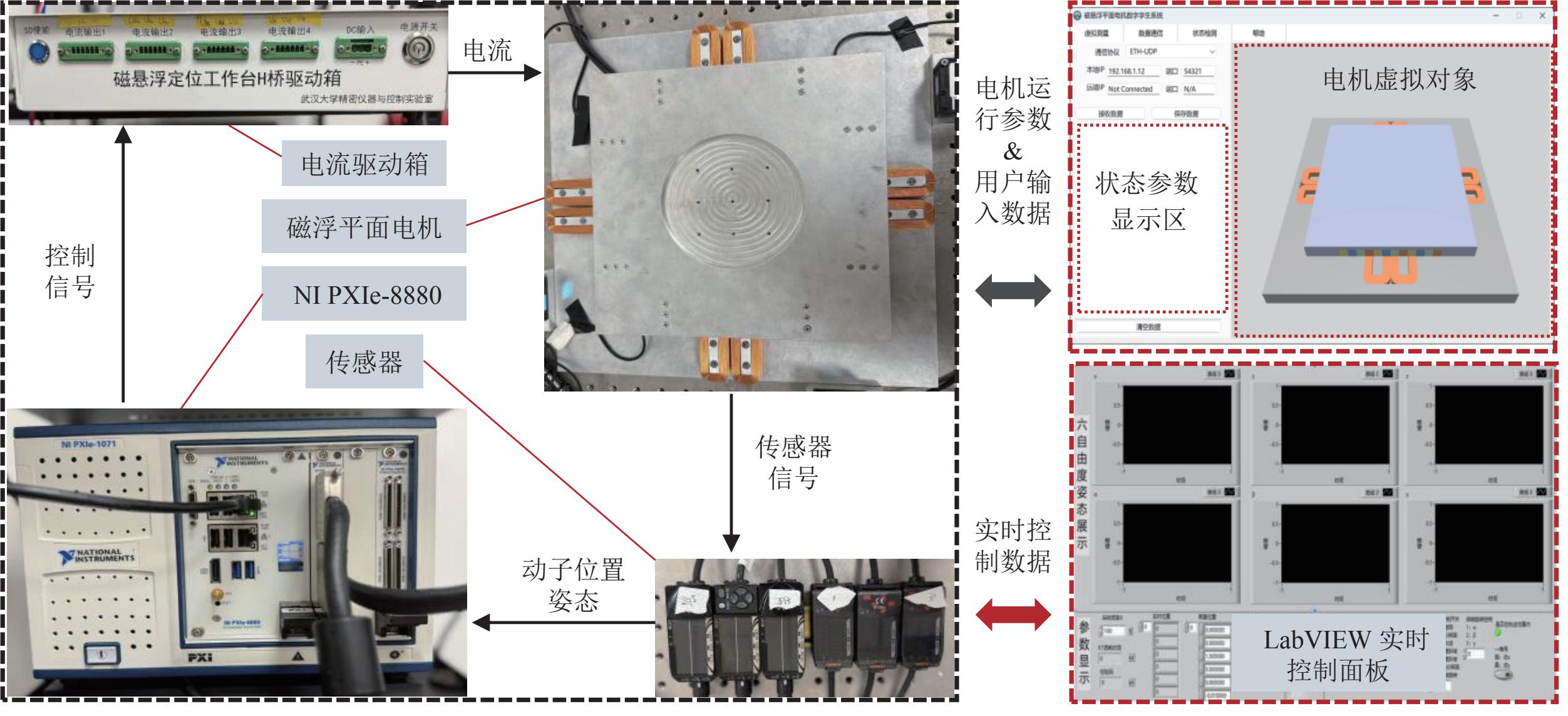
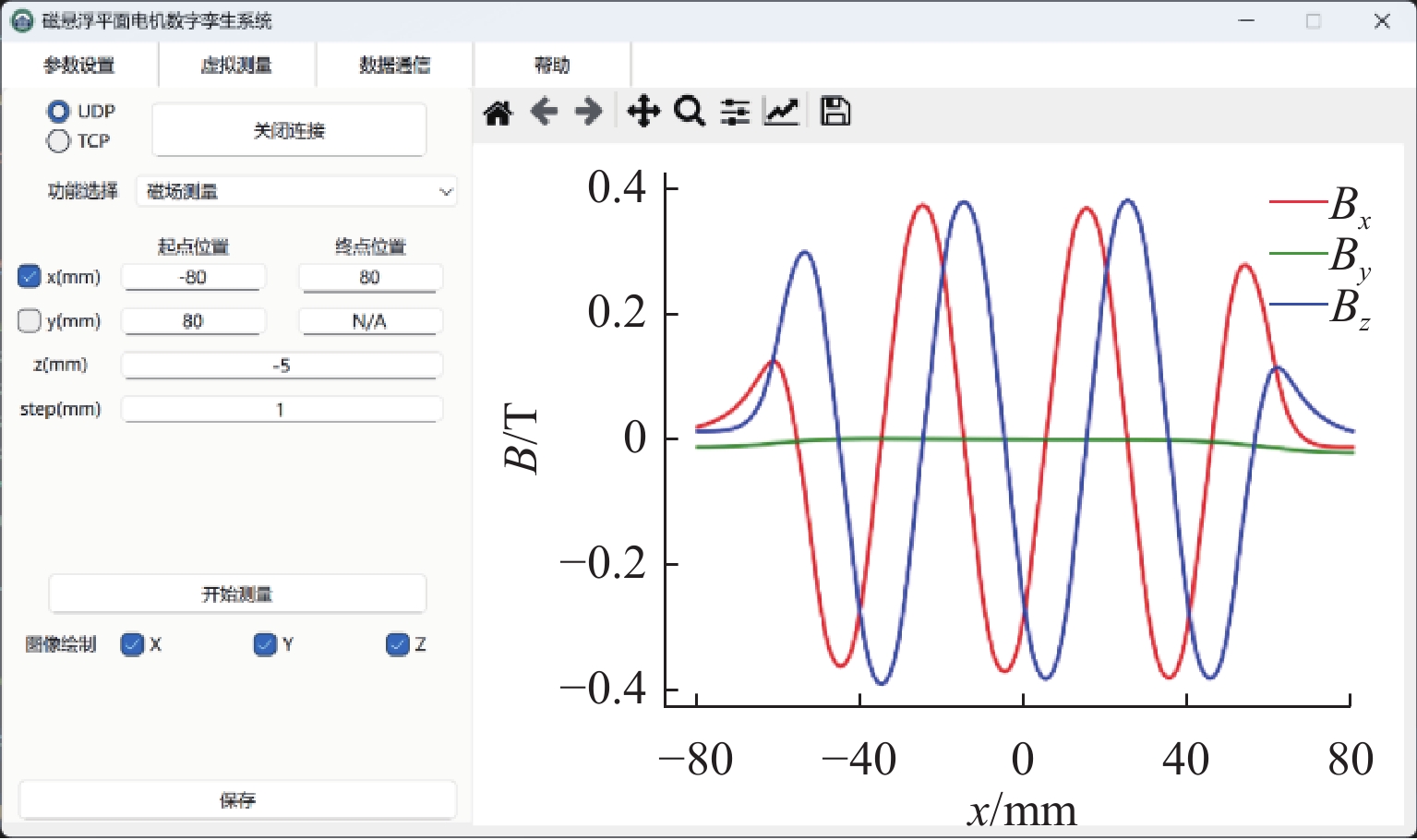
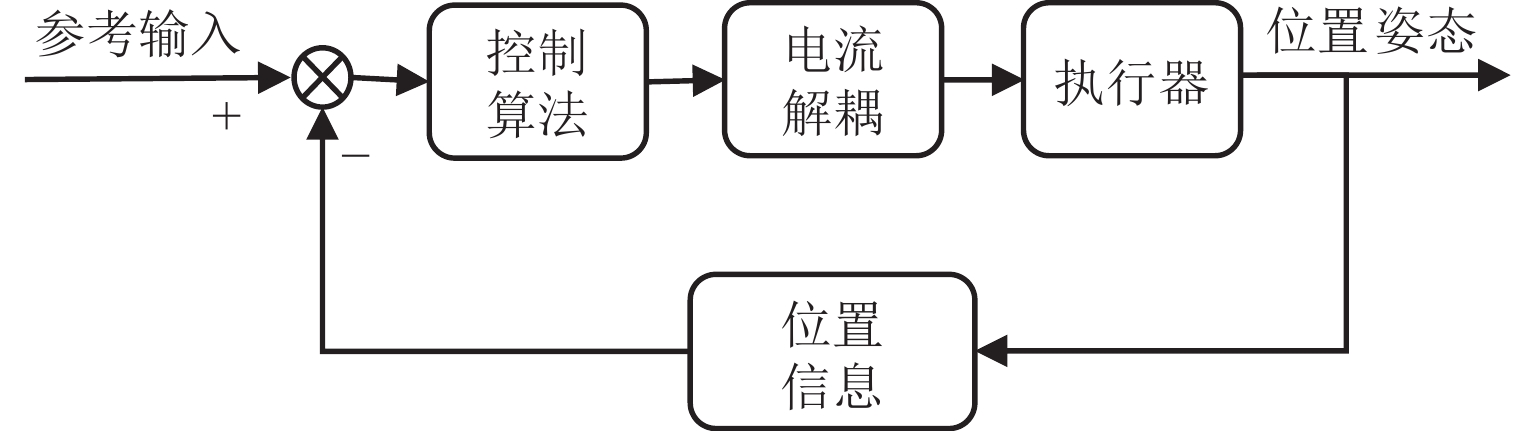
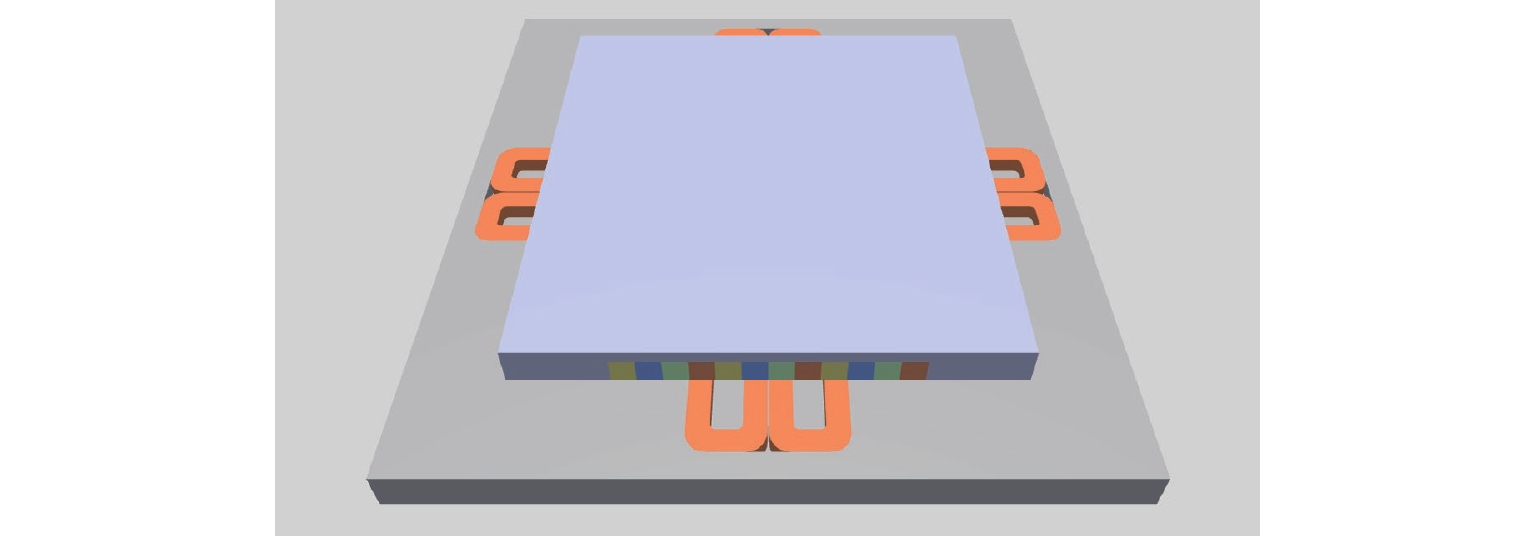
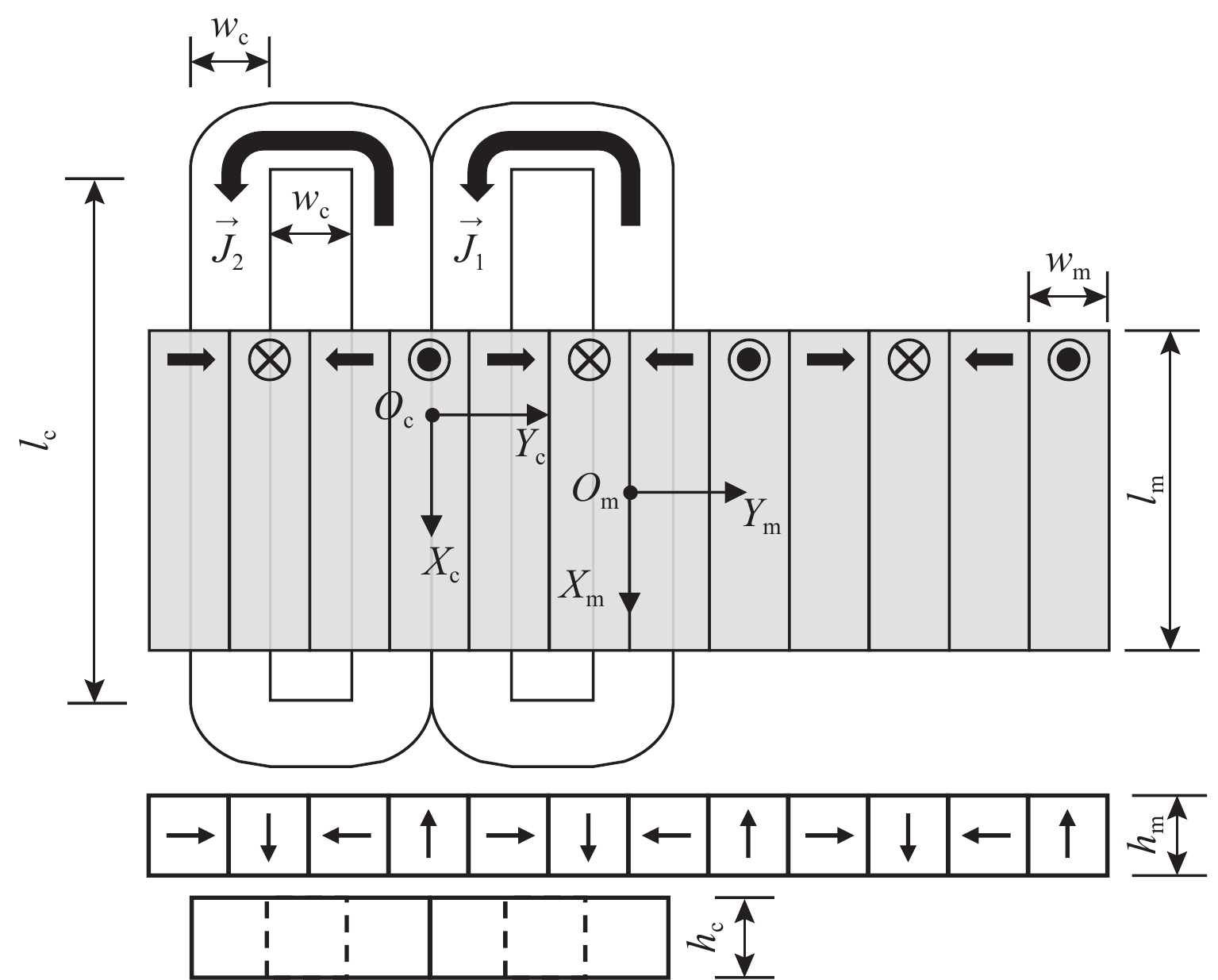
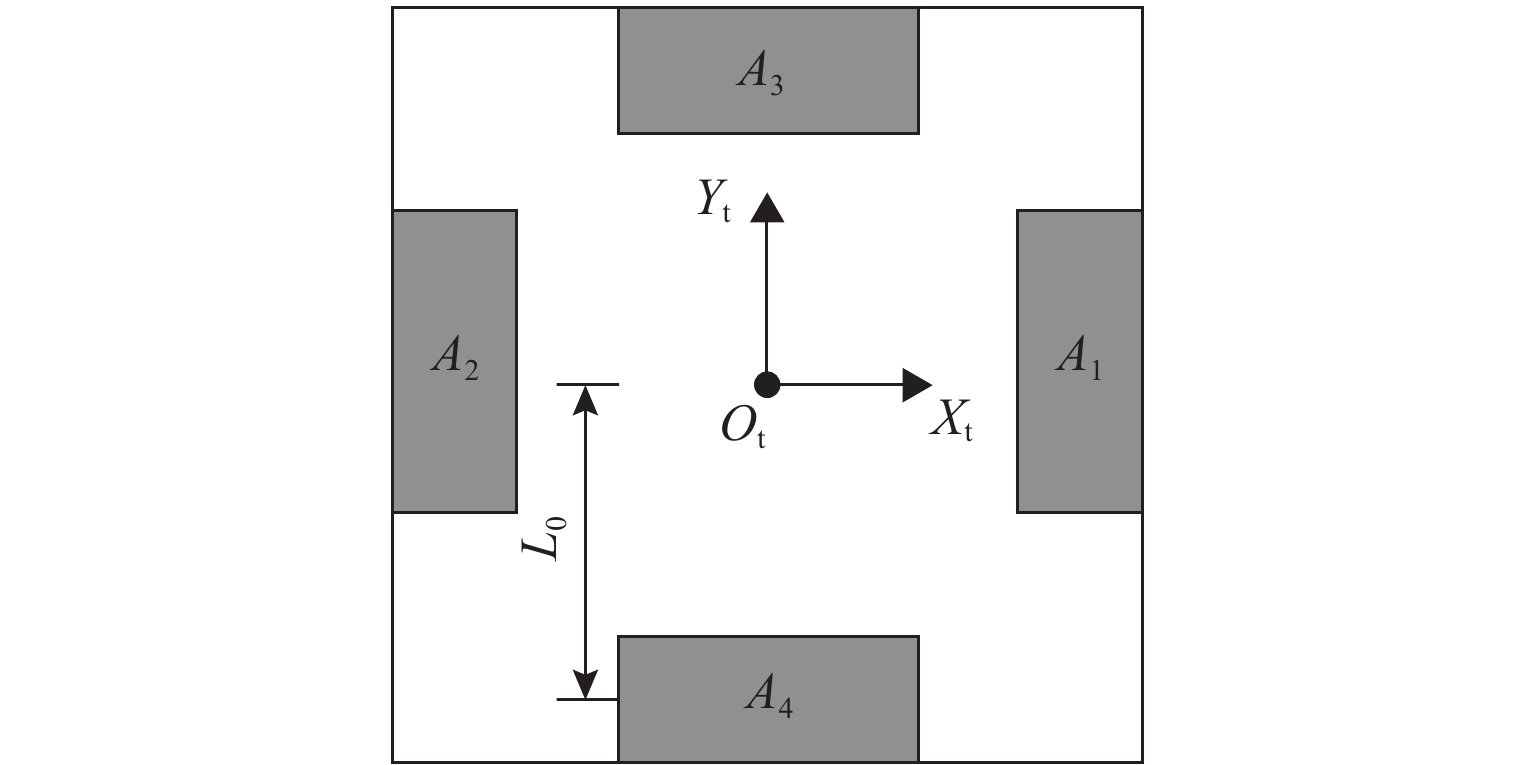
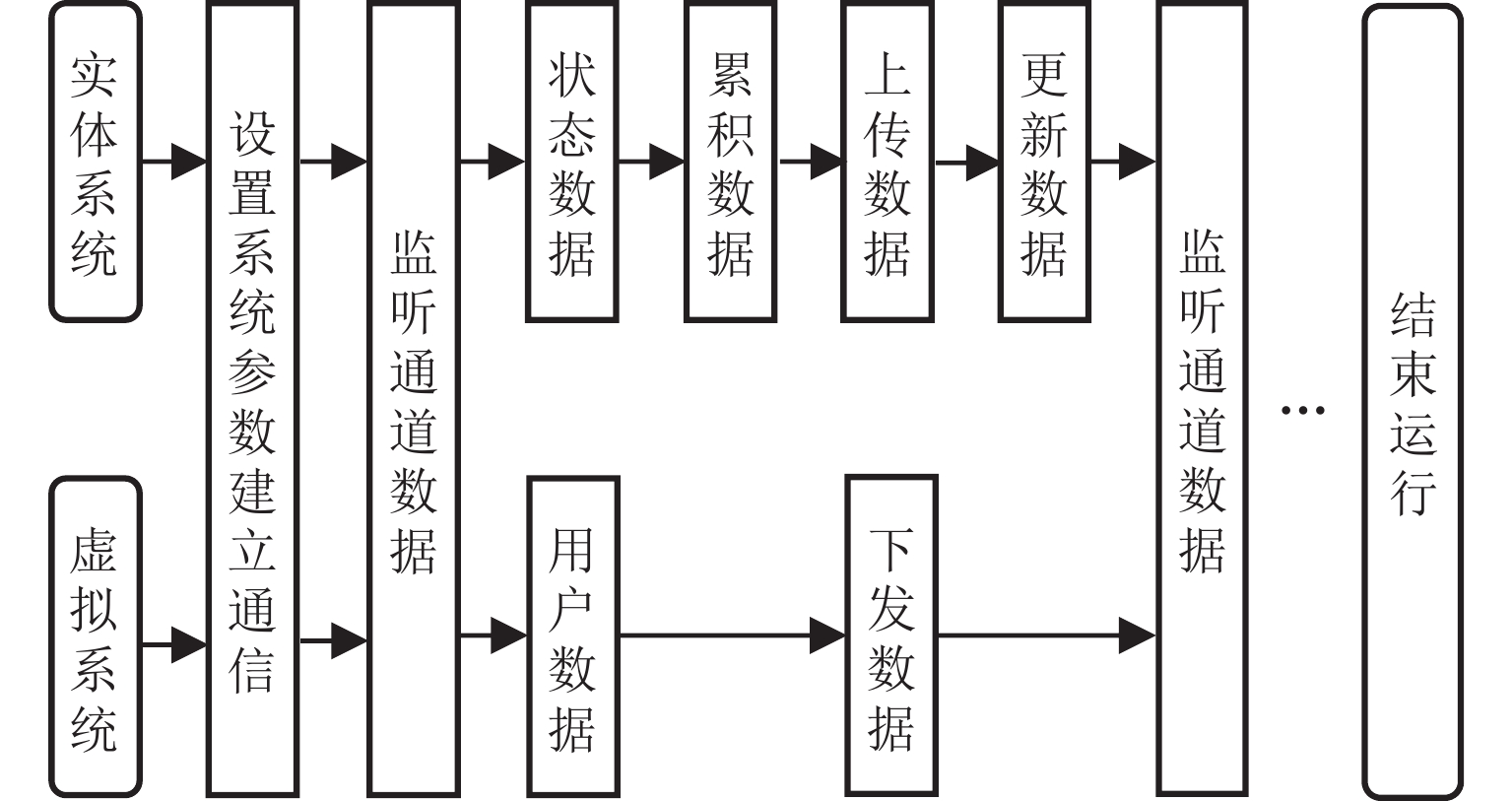
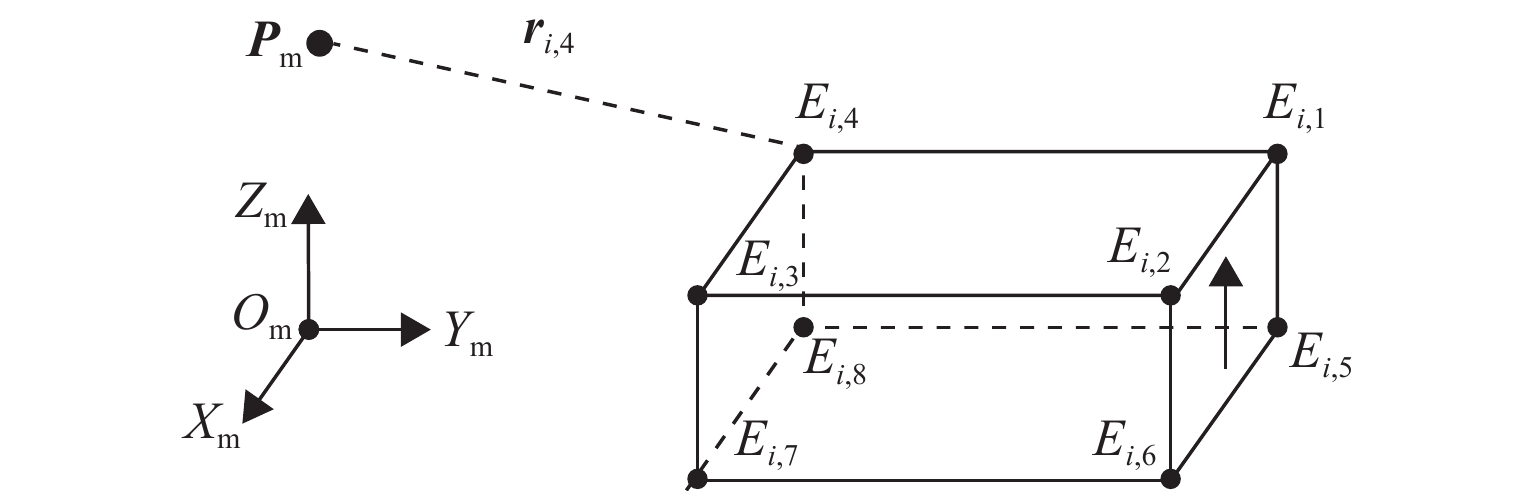
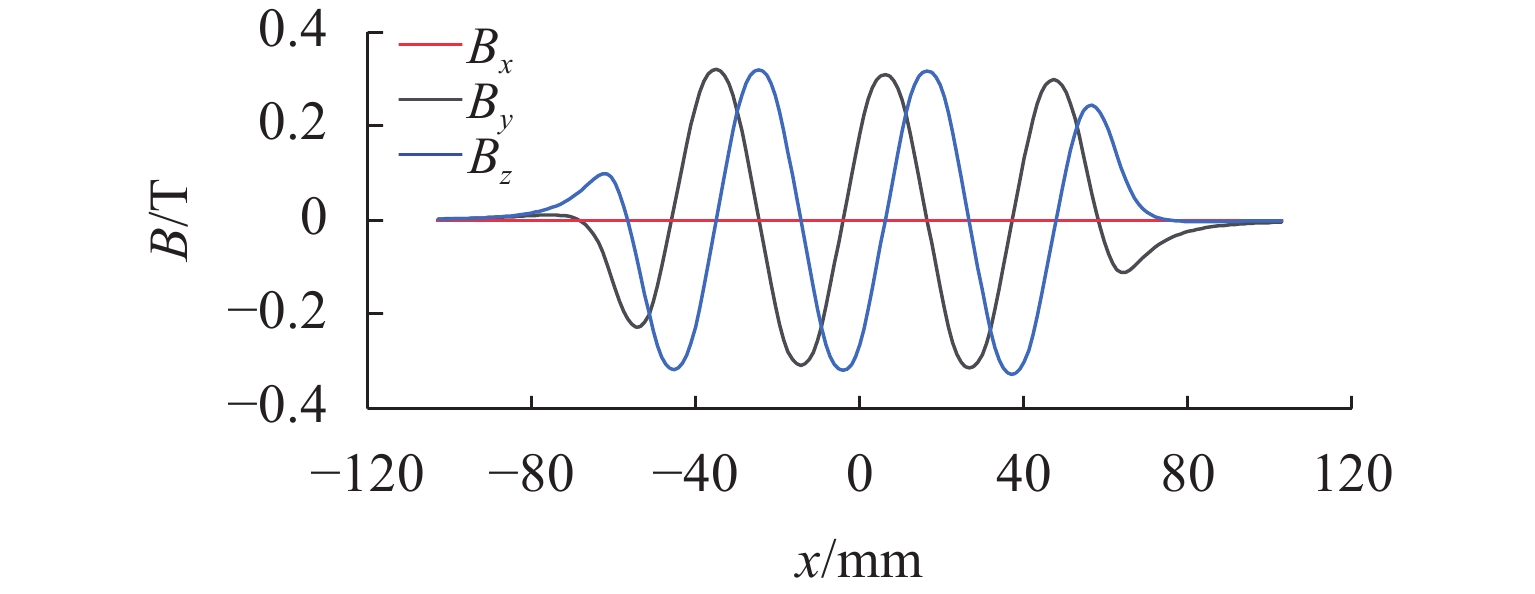
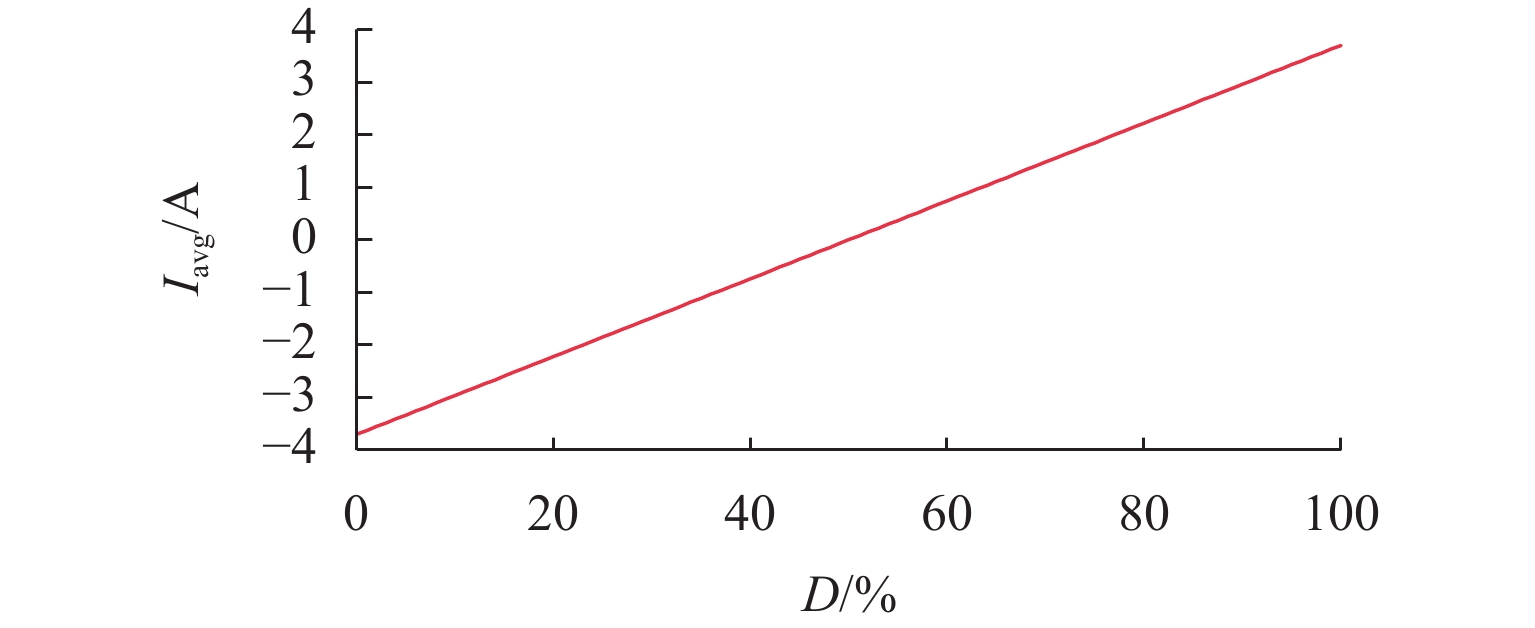
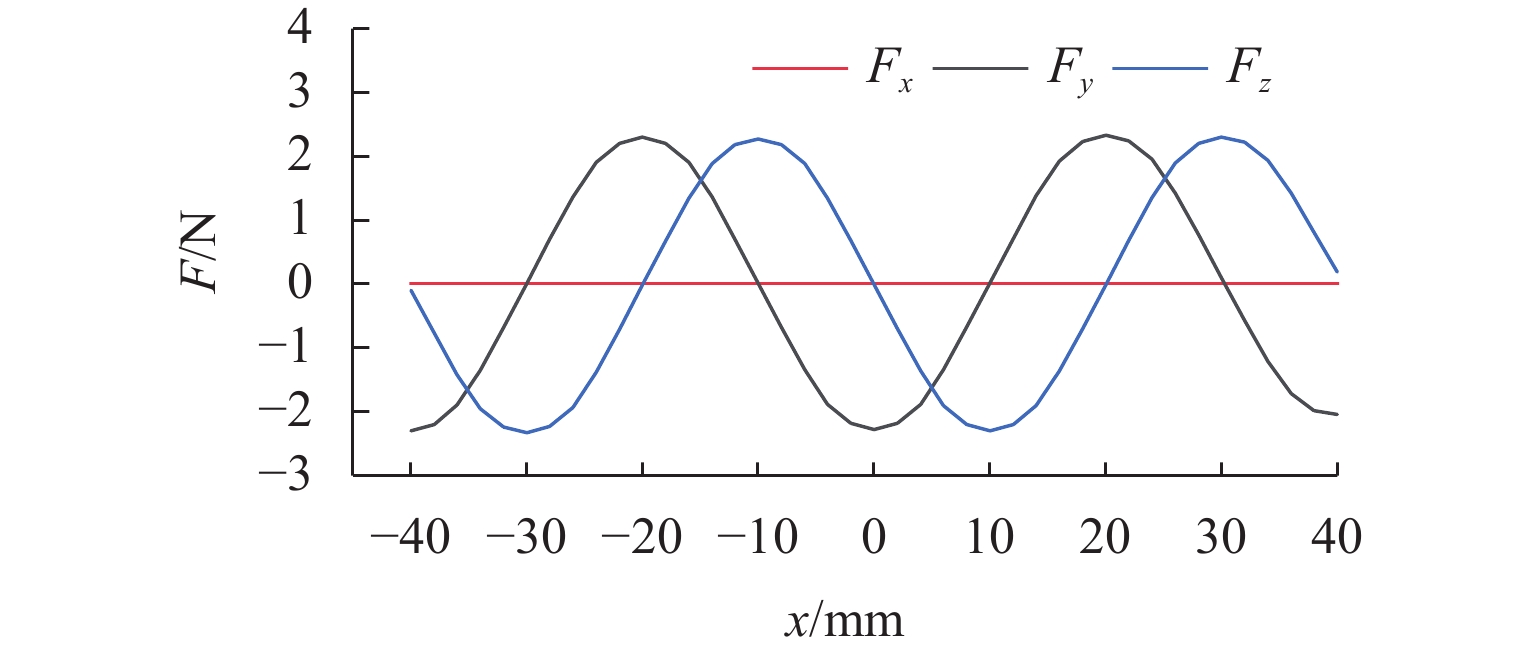
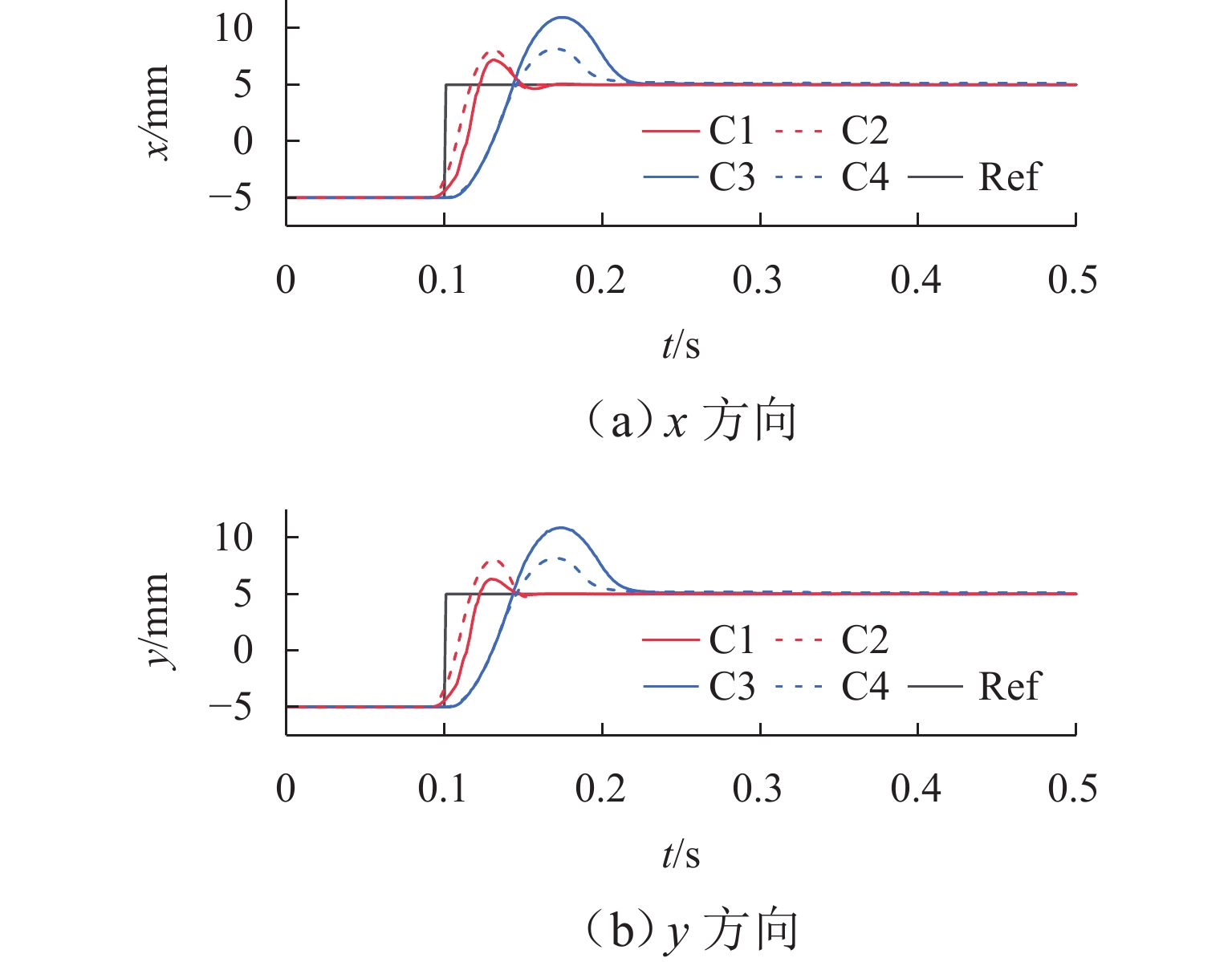
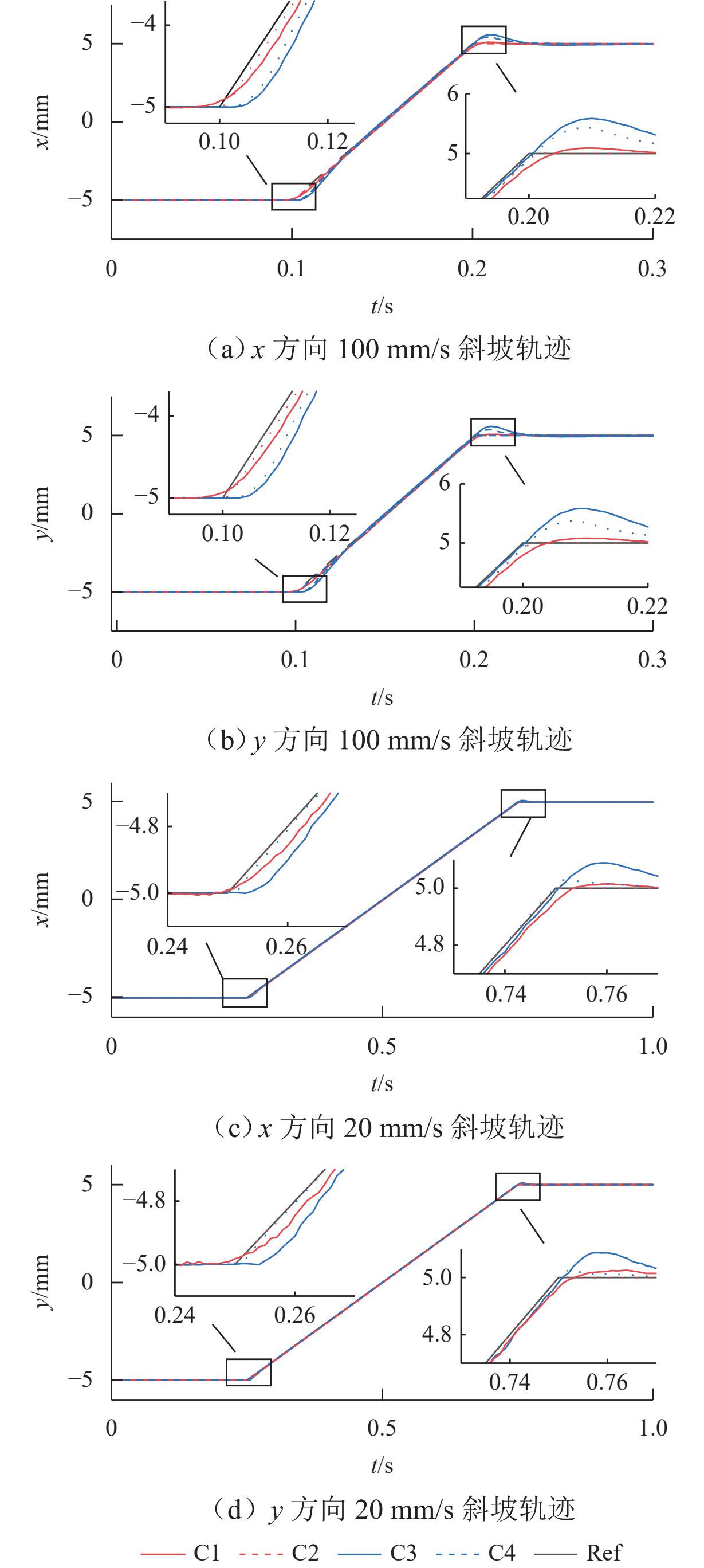
To enable real-time monitoring, intelligent evaluation, and assisted control of the state of a magnetic levitation planar motor, a digital twin system for a magnetic levitation planar motor was constructed. The communication scheme based on EtherNet/IP was adopted between the magnetic levitation planar motor and its twin model; the real-time key state data of the magnetic levitation planar motor, such as mover position and control outputs, was acquired by means of a virtual system of communication module; the relevant information was sent to the real-time control system. The magnetic levitation planar motor employed an NI PXIe-8880 as the core control platform, performing high-real-time tasks including position-sensor signal acquisition, position computation, and execution of control algorithms. The digital twin system implemented a graphical user interface by using PySide6 and employed the OpenGL graphics library for three-dimensional visualization of the virtual model, enabling a physical mapping of the virtual system to the motor. Ultimately, by using C ++ computational libraries, the virtual system performed rapid virtual measurement of the motor’s magnetic field intensity, current magnitude, coil force, and motion states based on measurable real-time key parameters of the motor, thereby supporting real-time visualization monitoring, intelligent evaluation, control tracking, and other requirements for the motor. Research results show that the twin model’s virtual measurements of magnetic fields, currents, coil forces, and coil temperature, together with its motion state simulation, closely match those of the physical motor. The proposed digital twin system offers an accurate mapping of the magnetic levitation planar motor, and its measurement approach provides a feasible pathway for intelligent control and expanded applications of the motor.
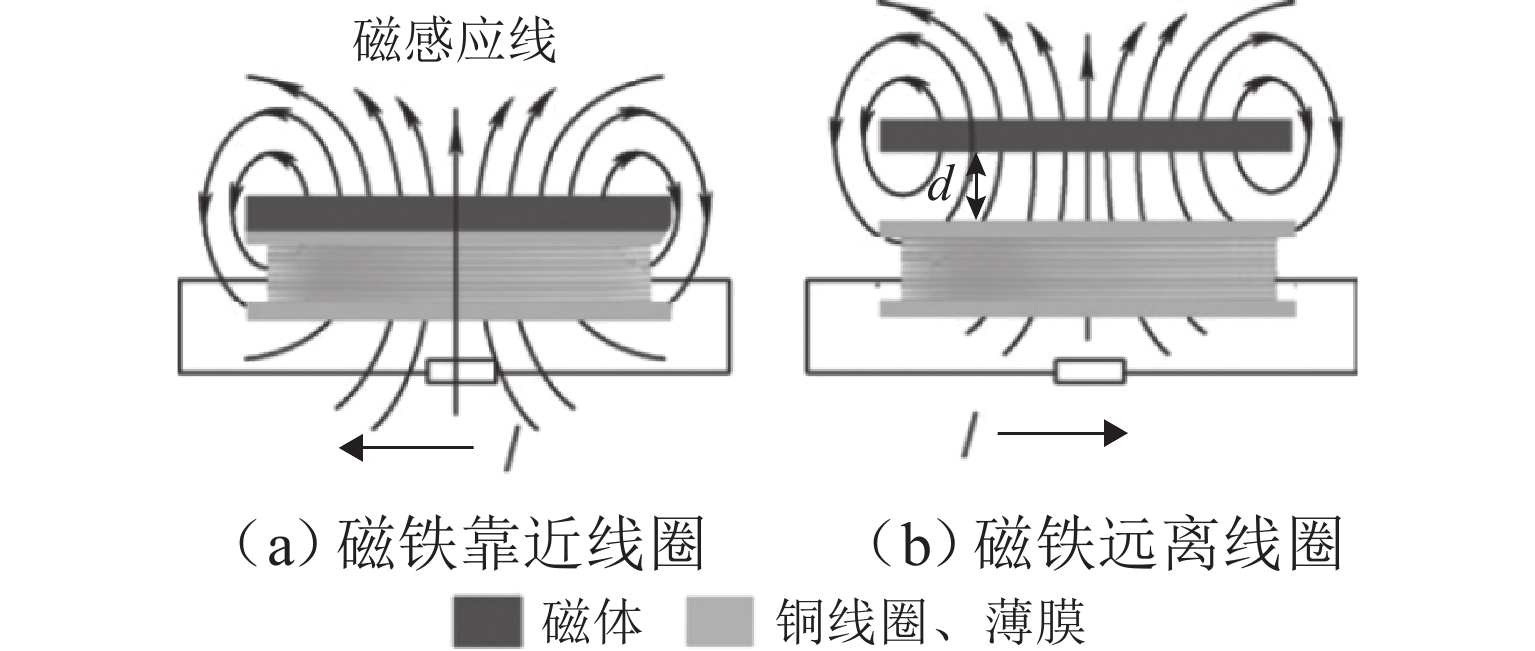
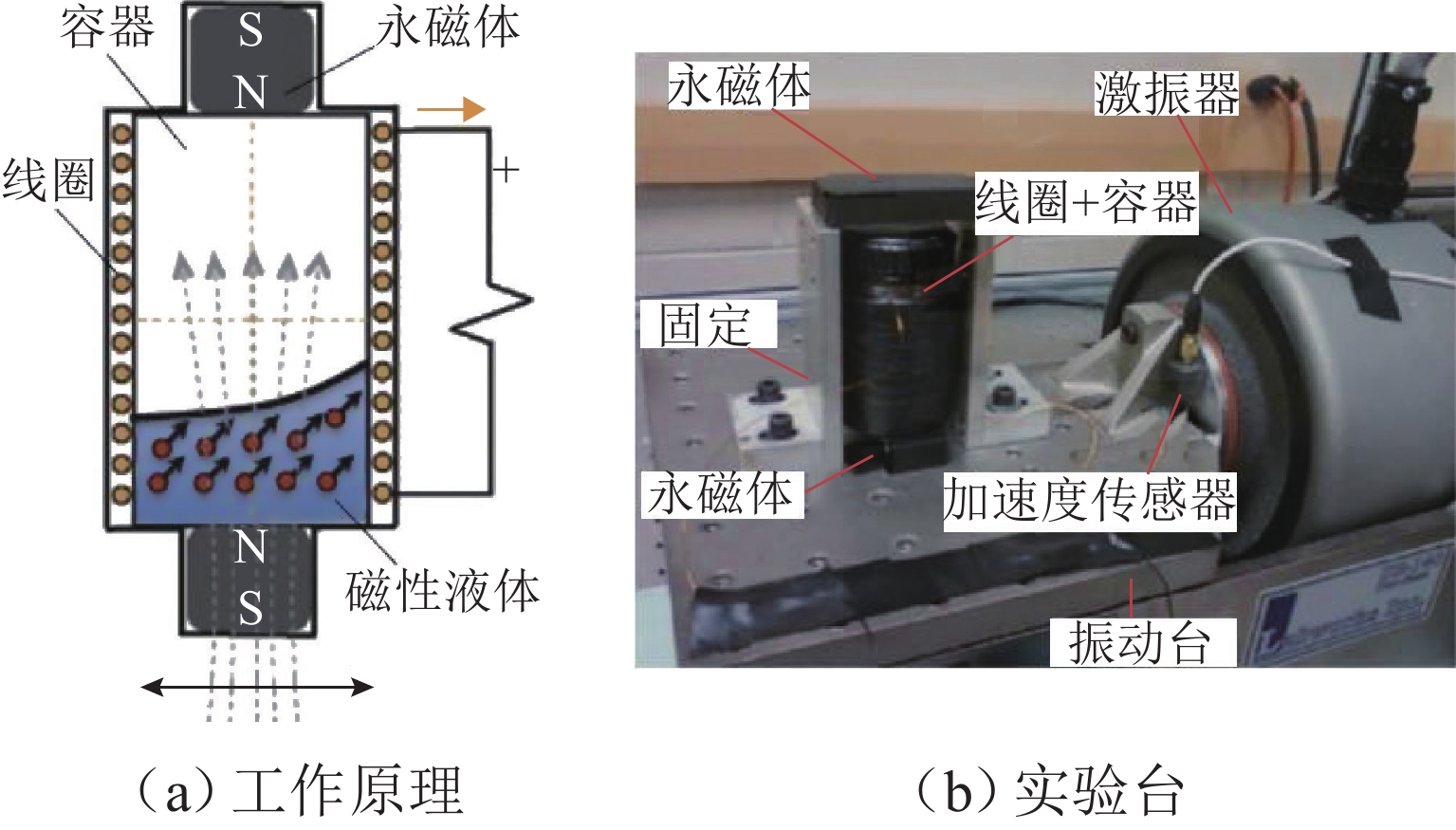
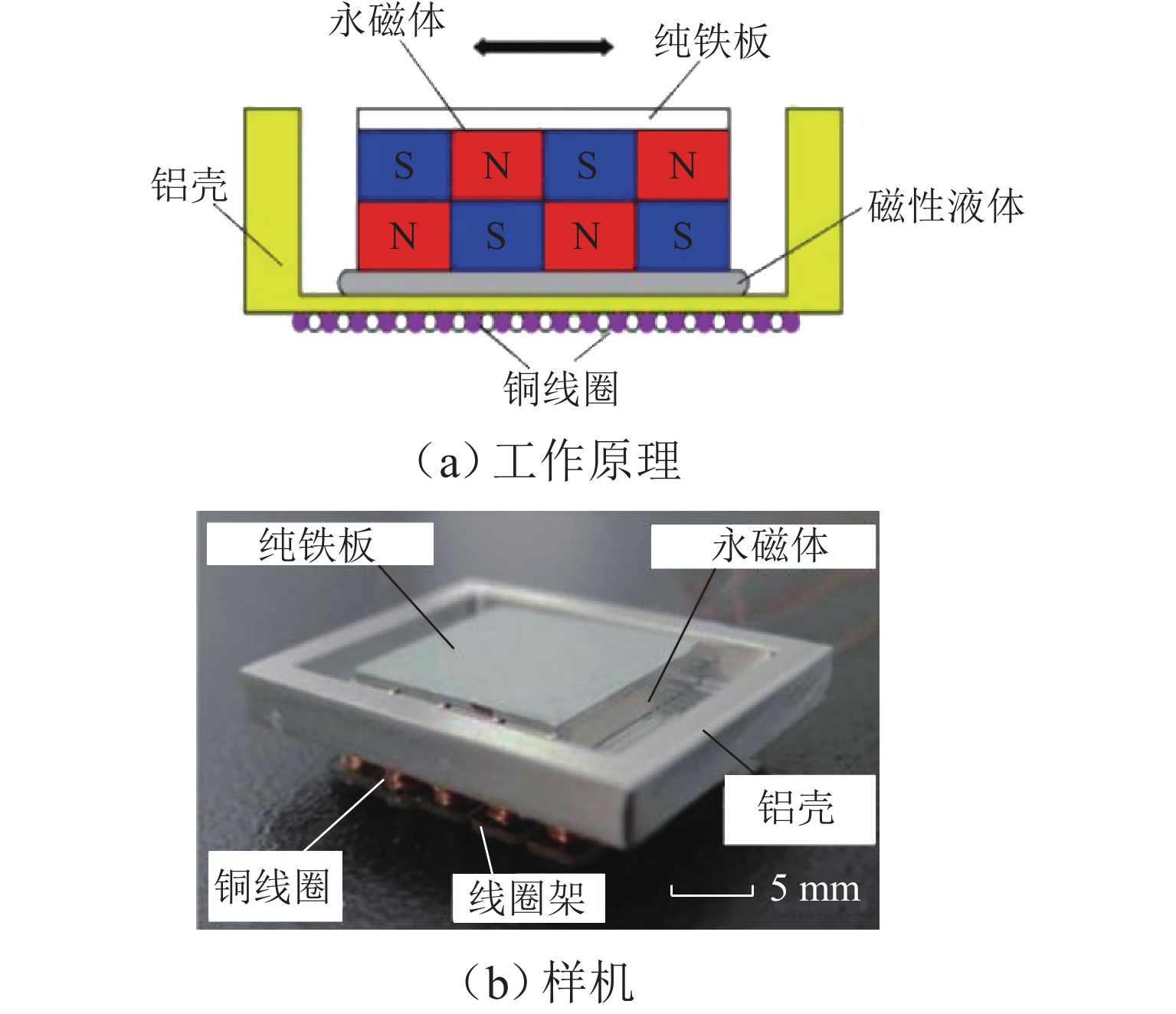
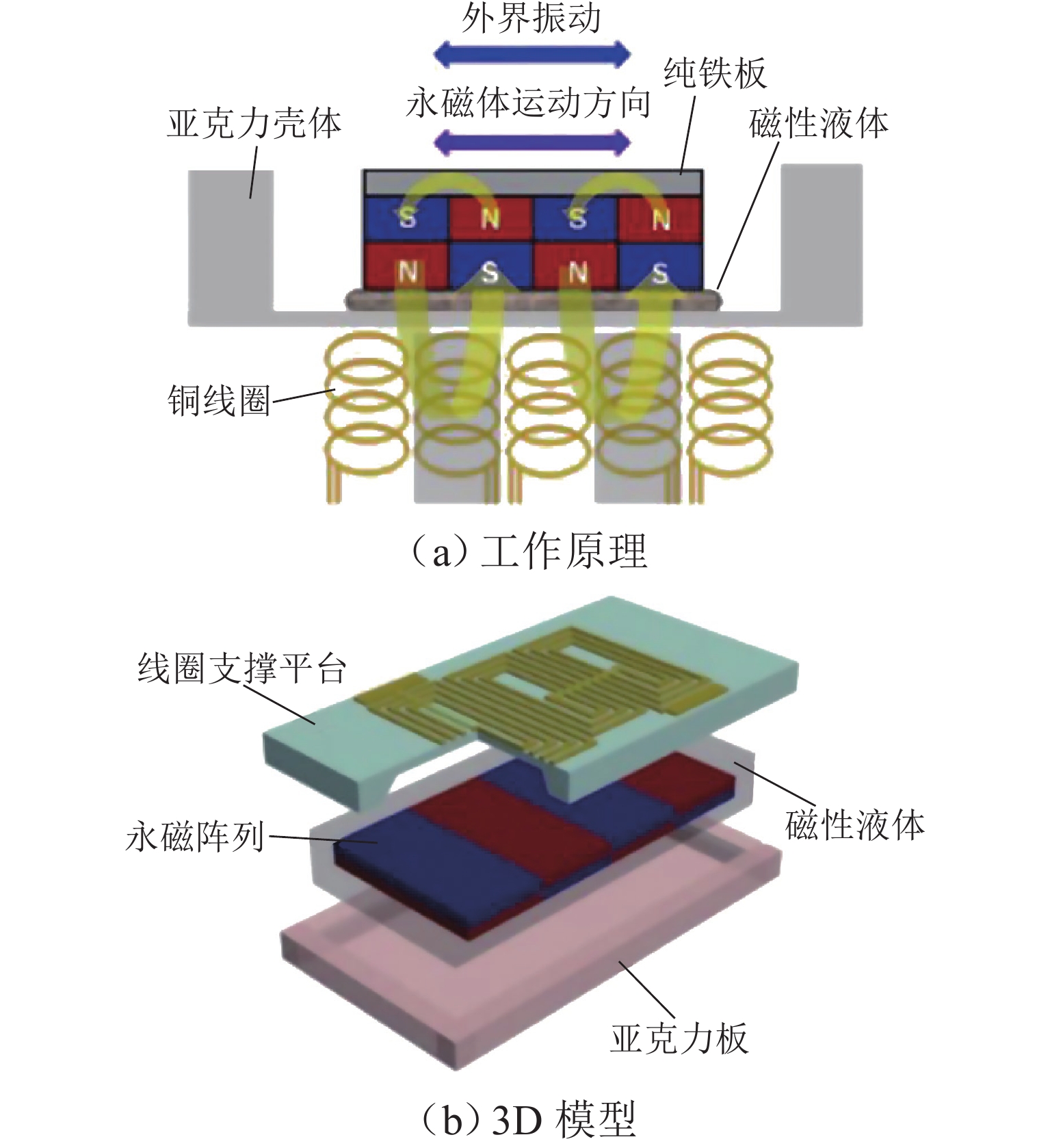
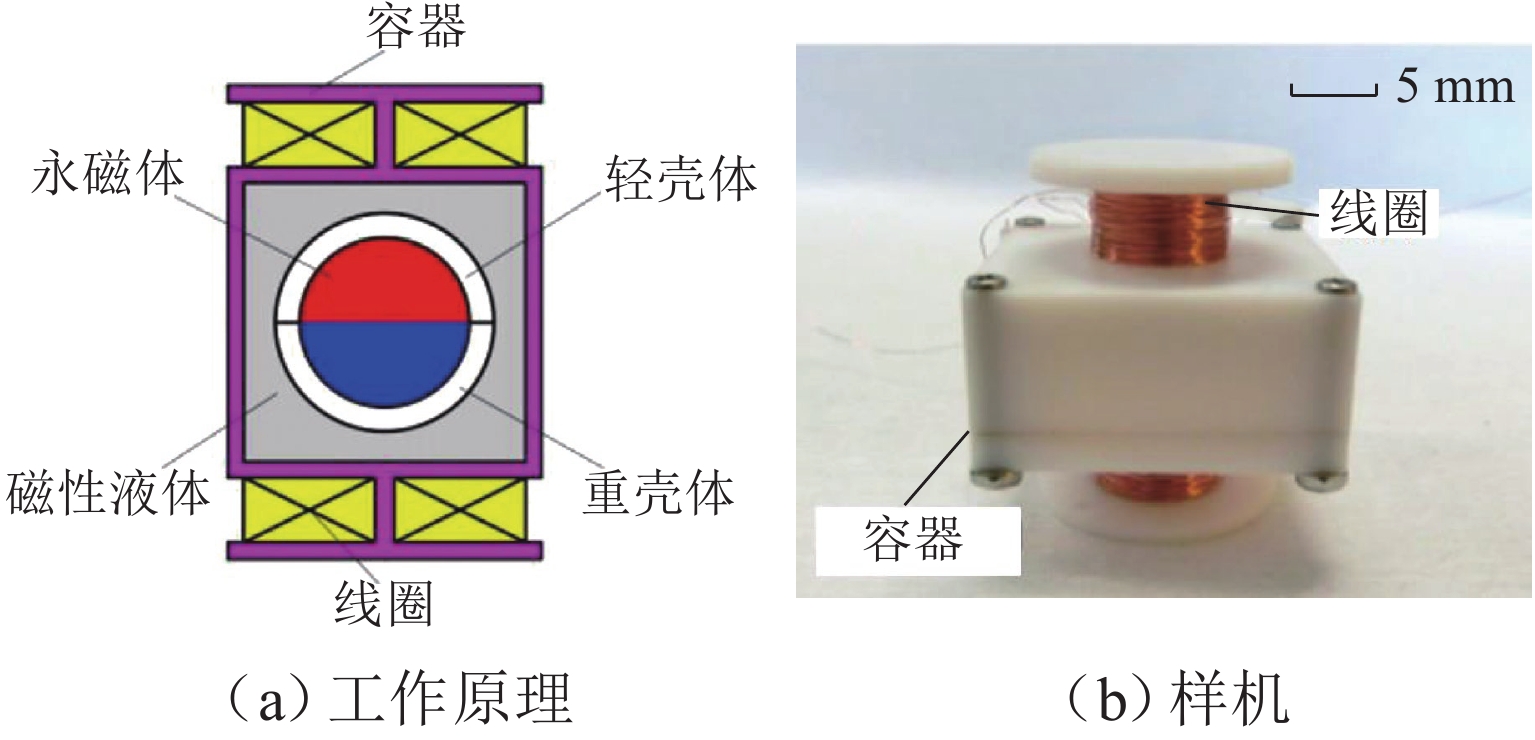
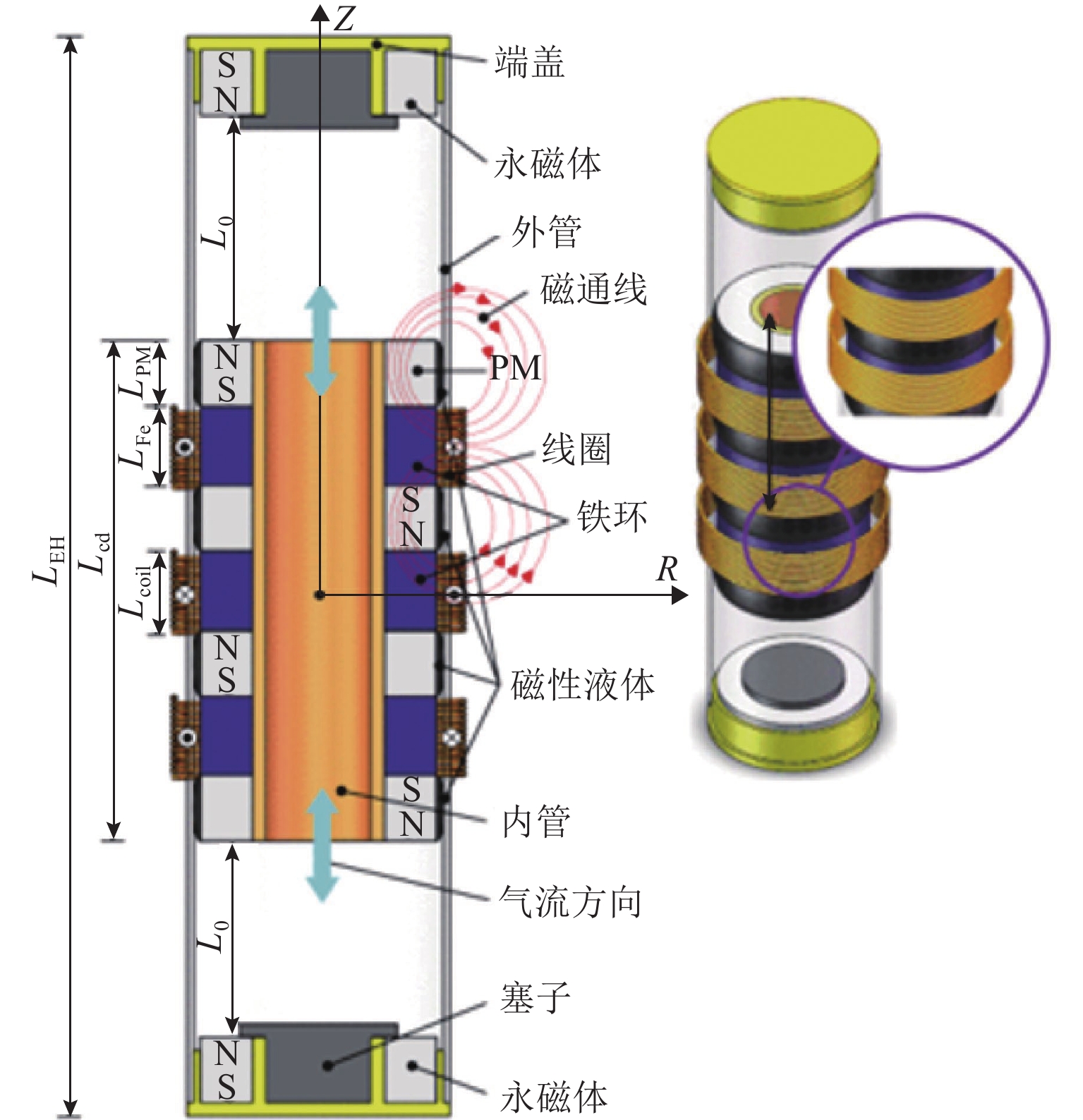
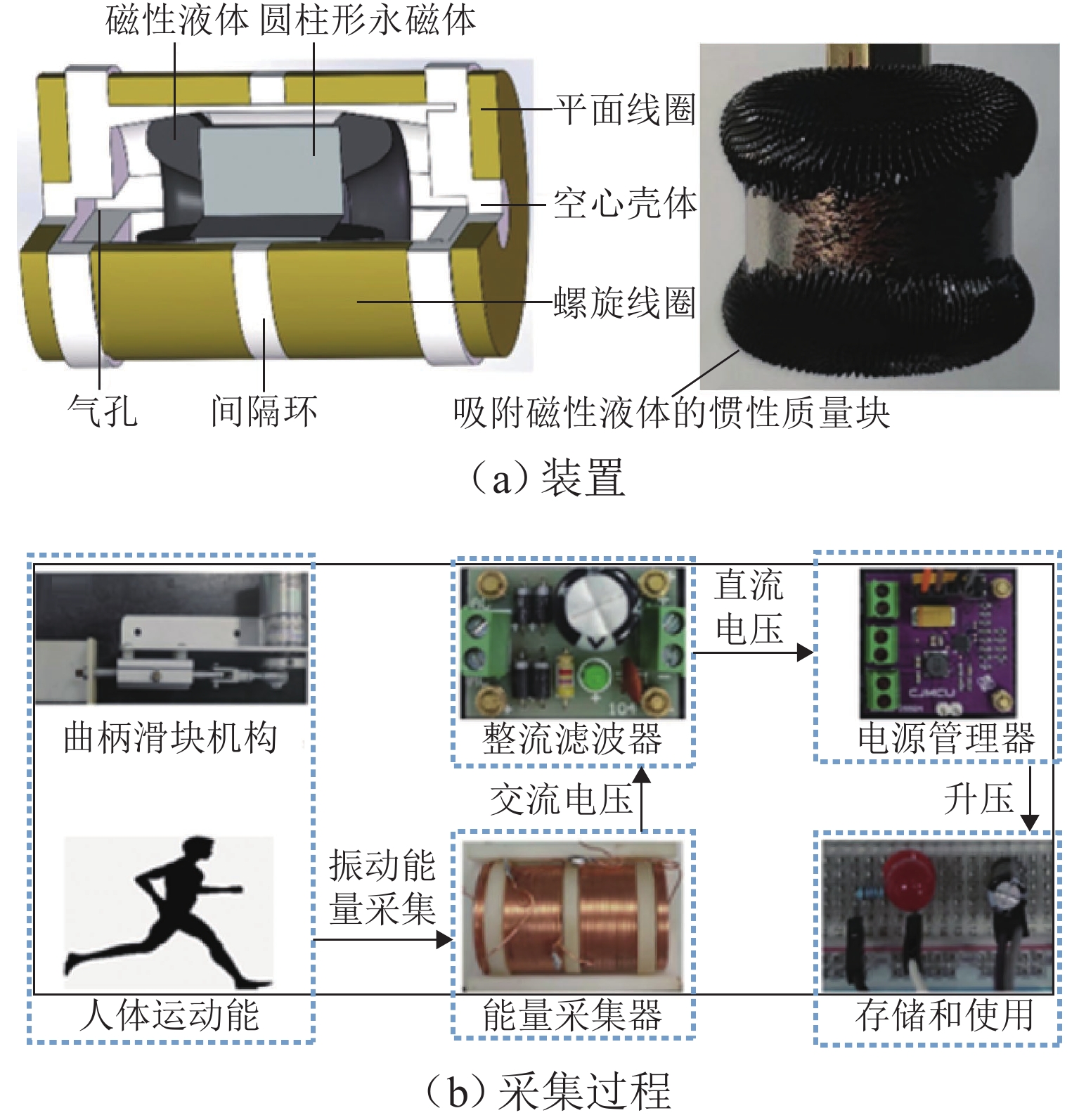
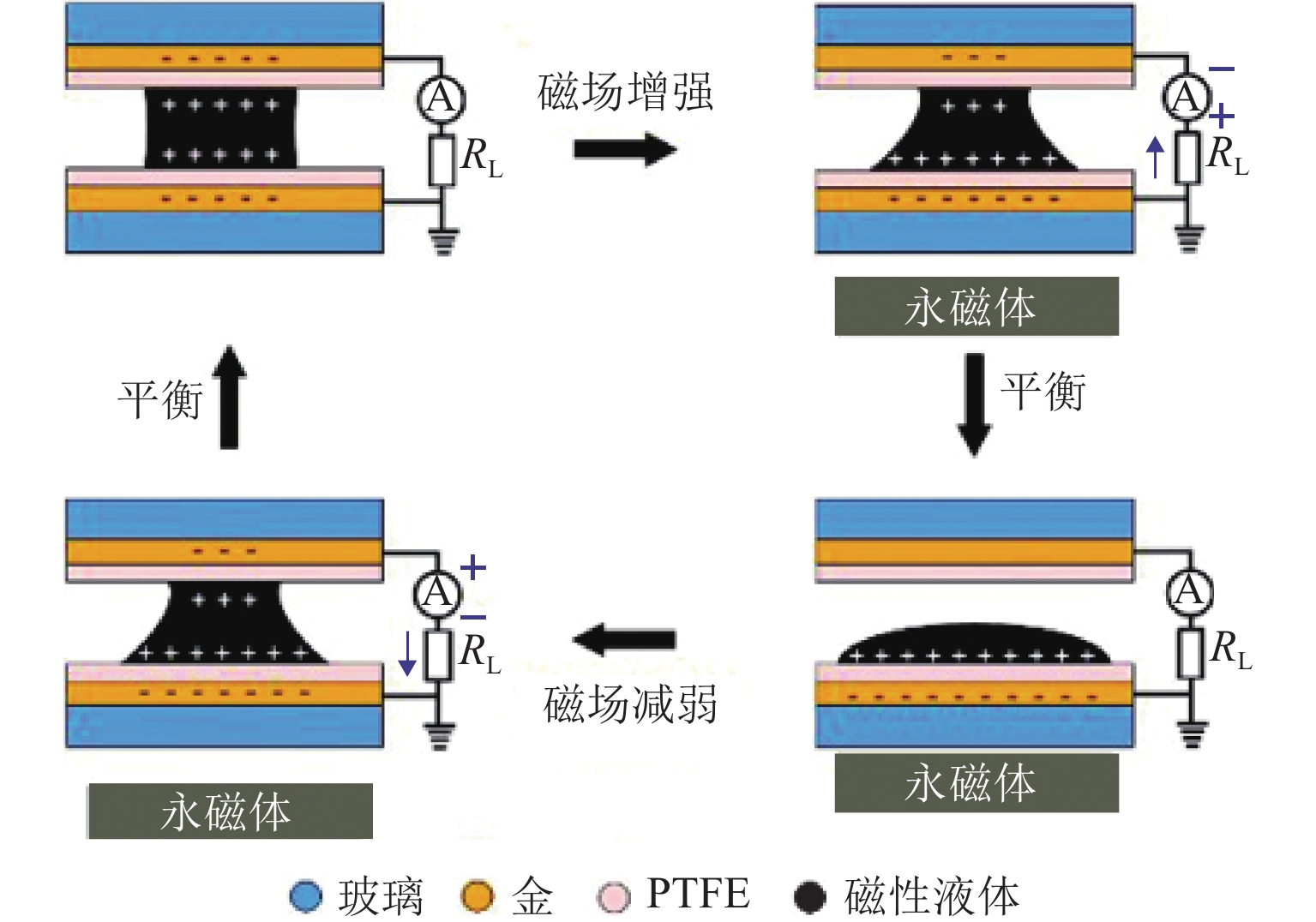
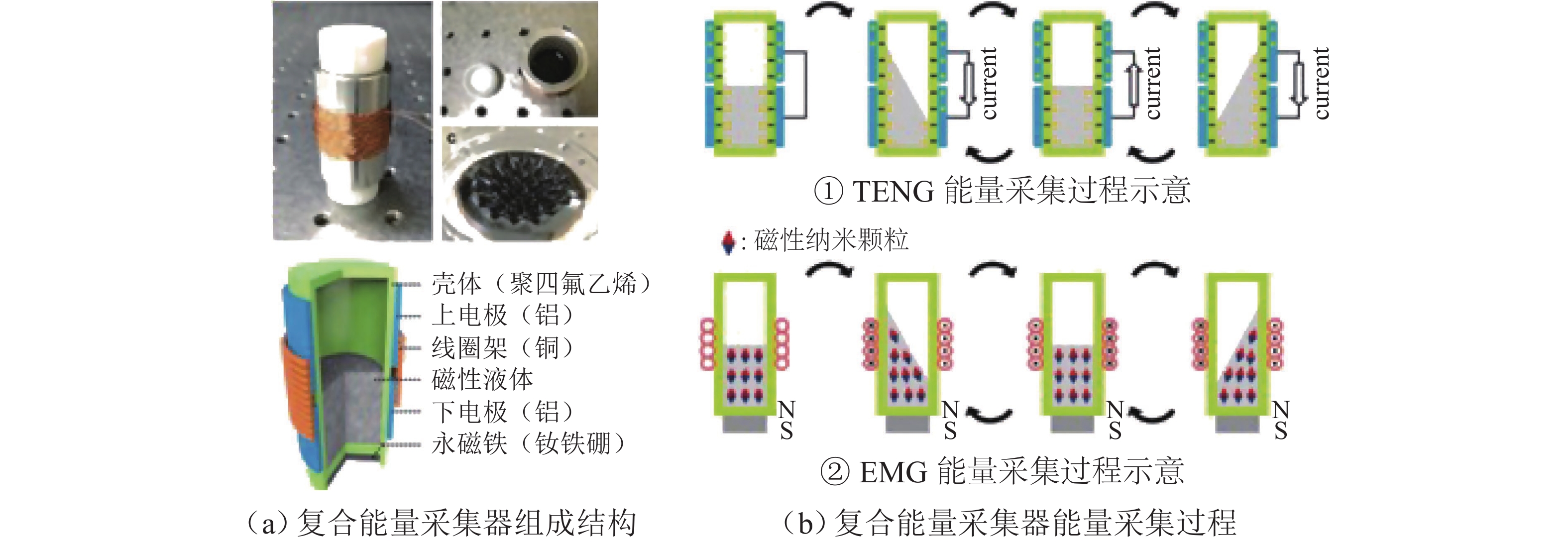
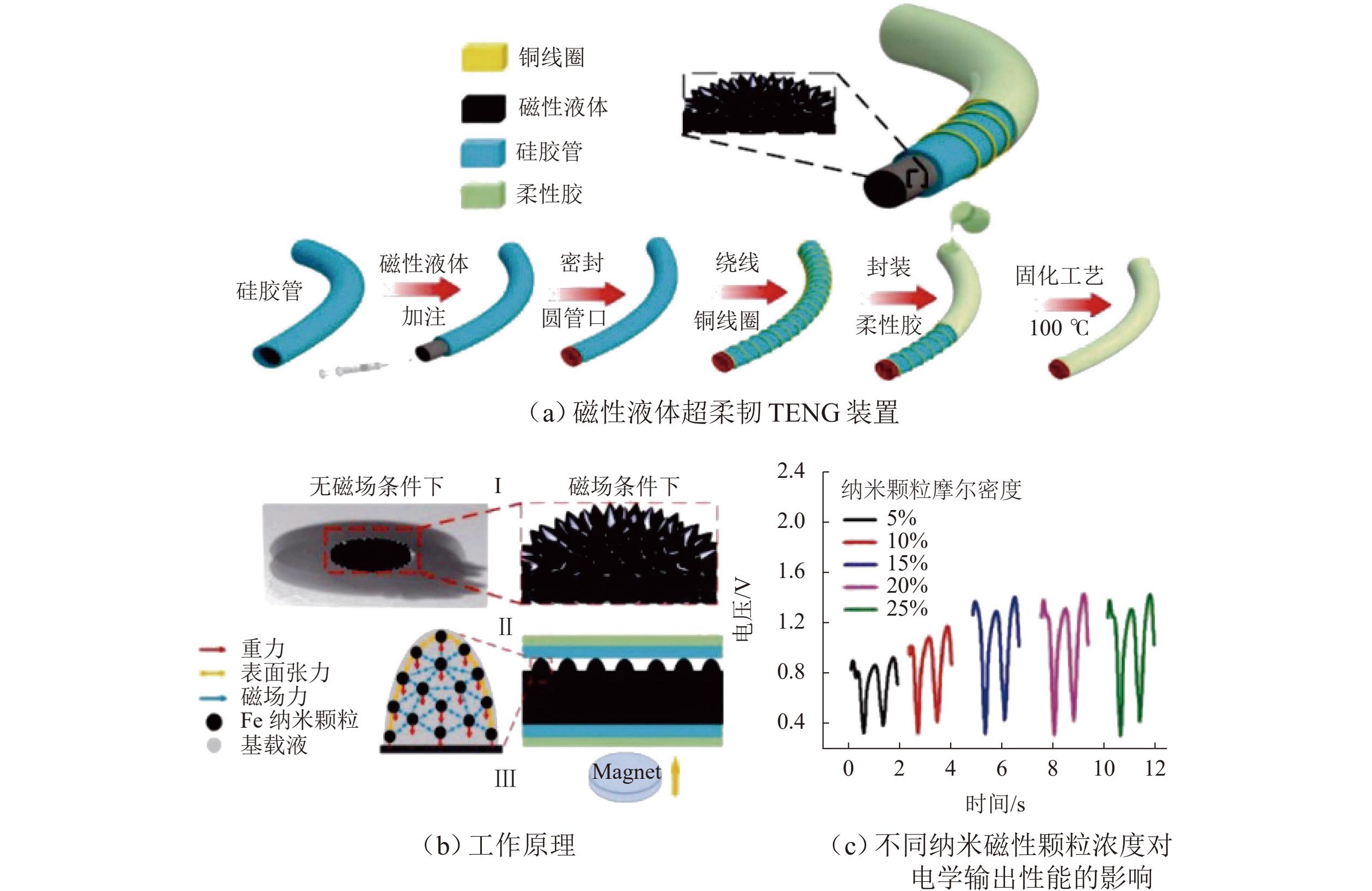
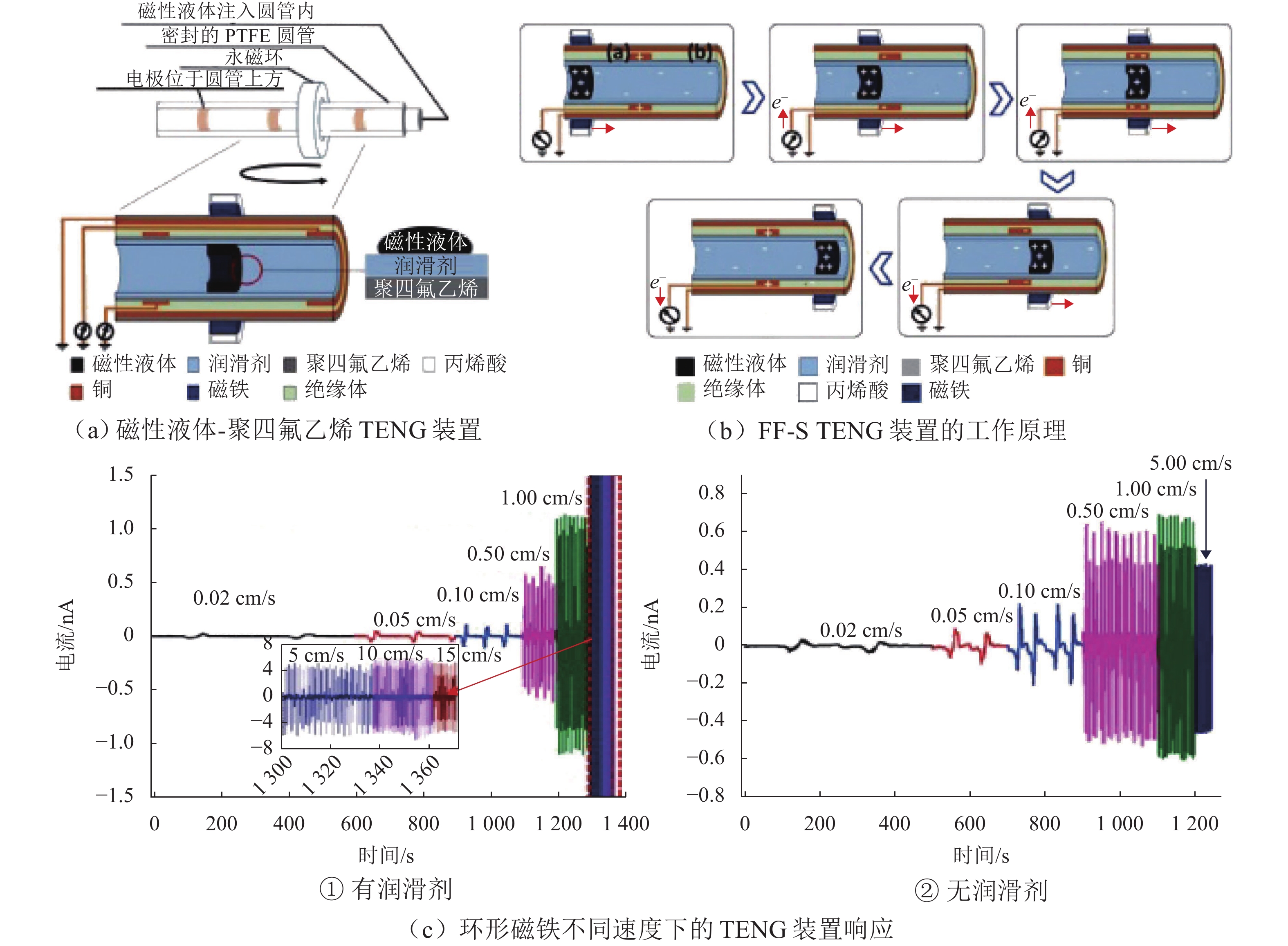
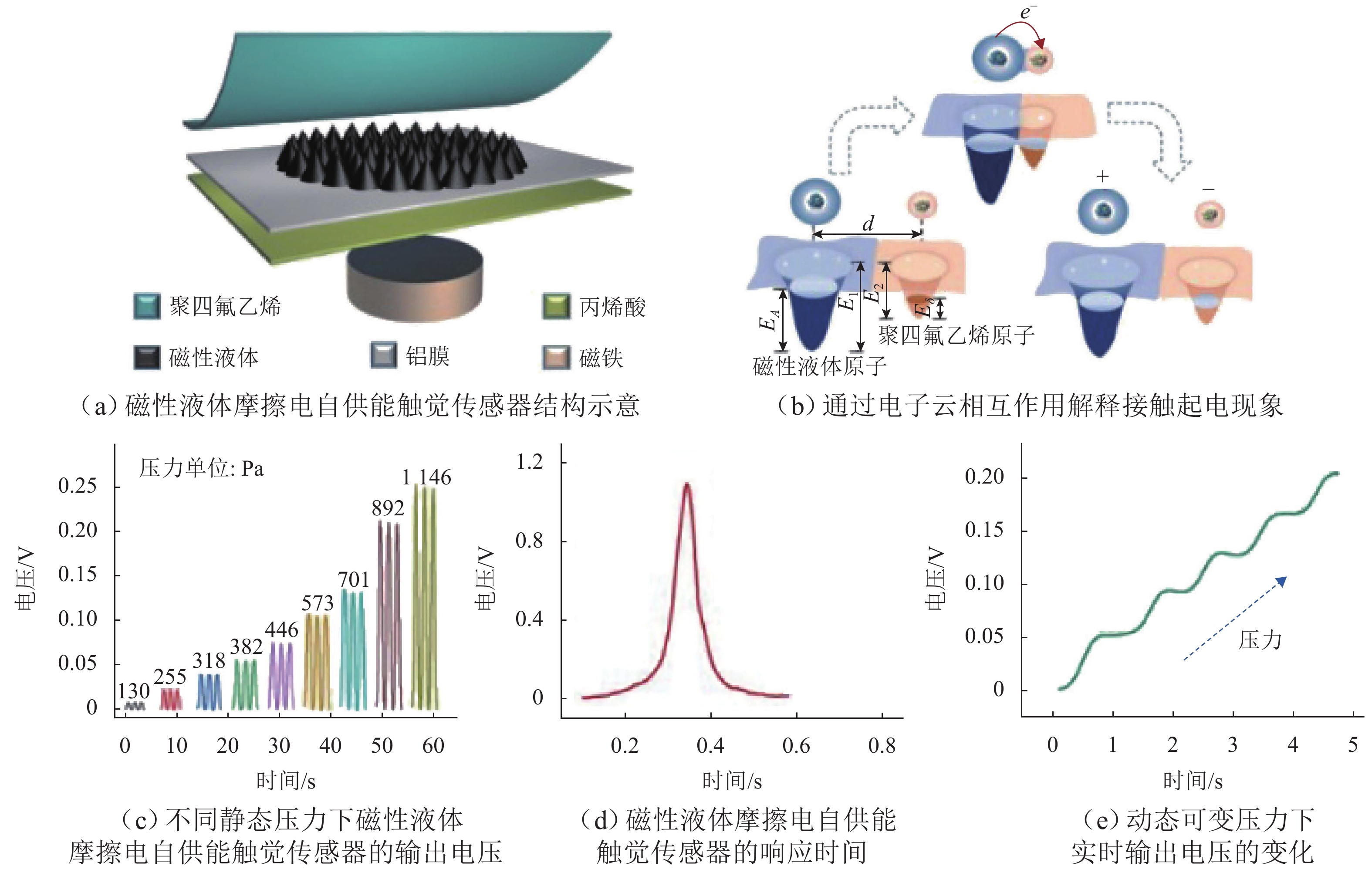
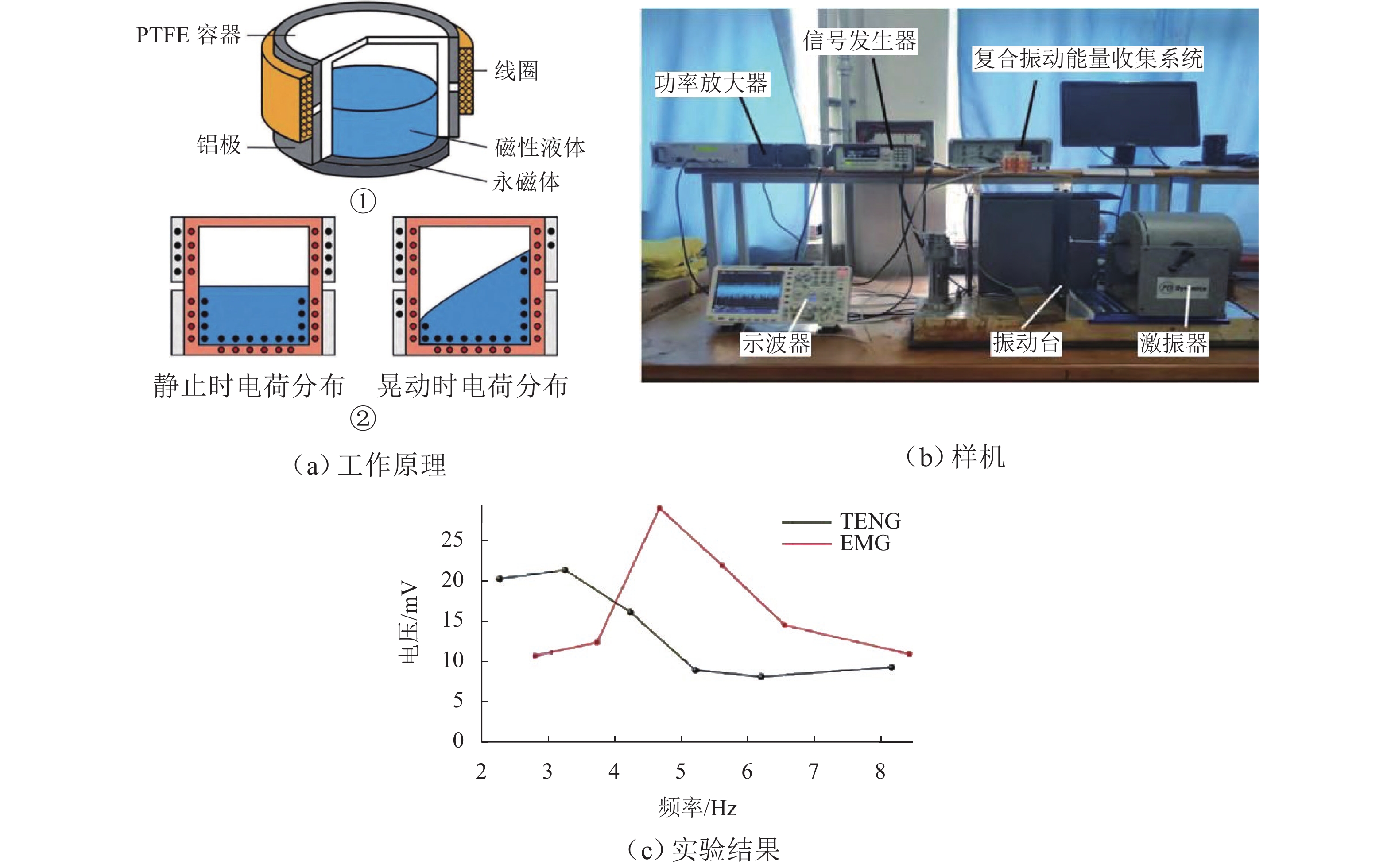
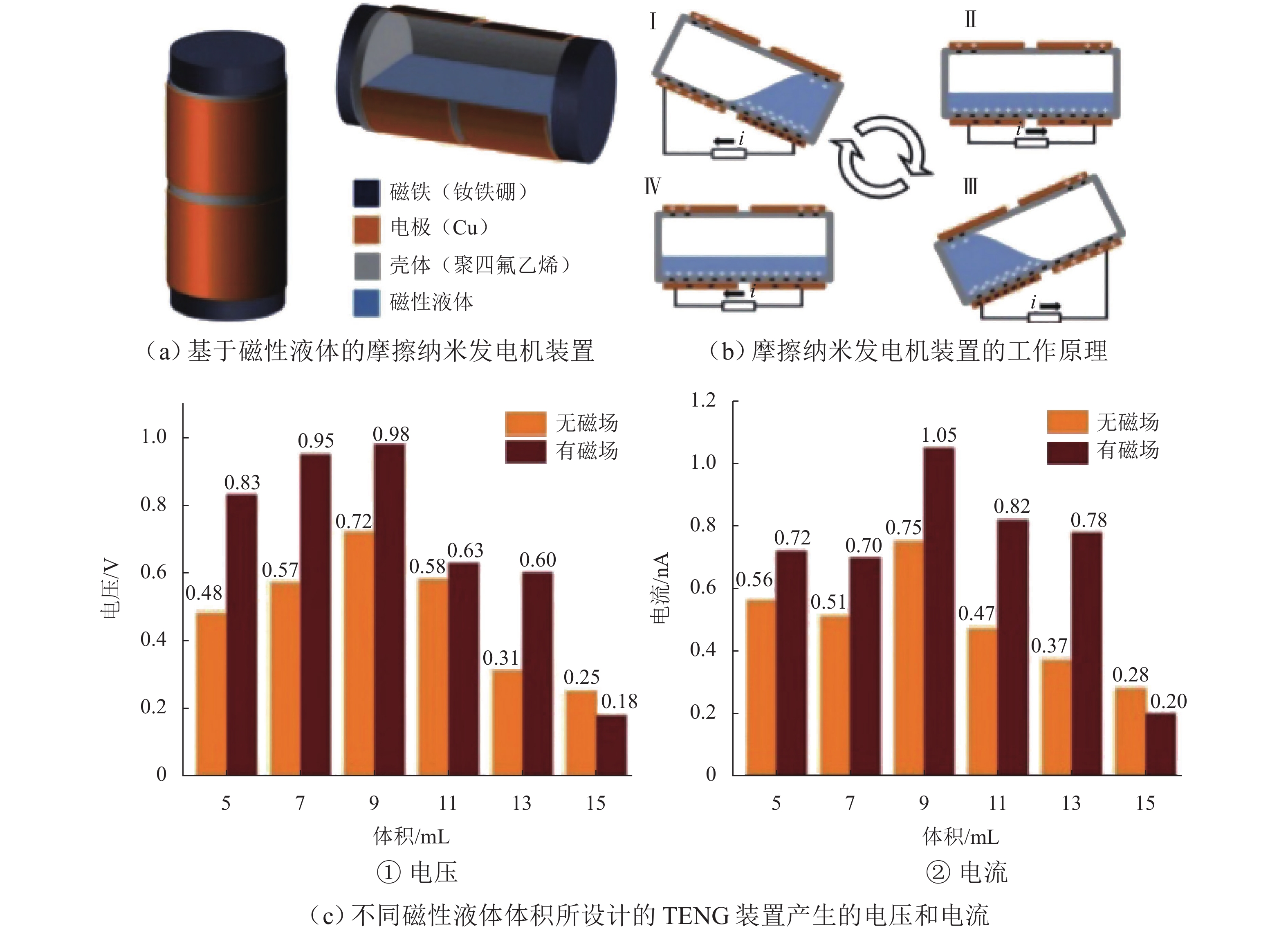
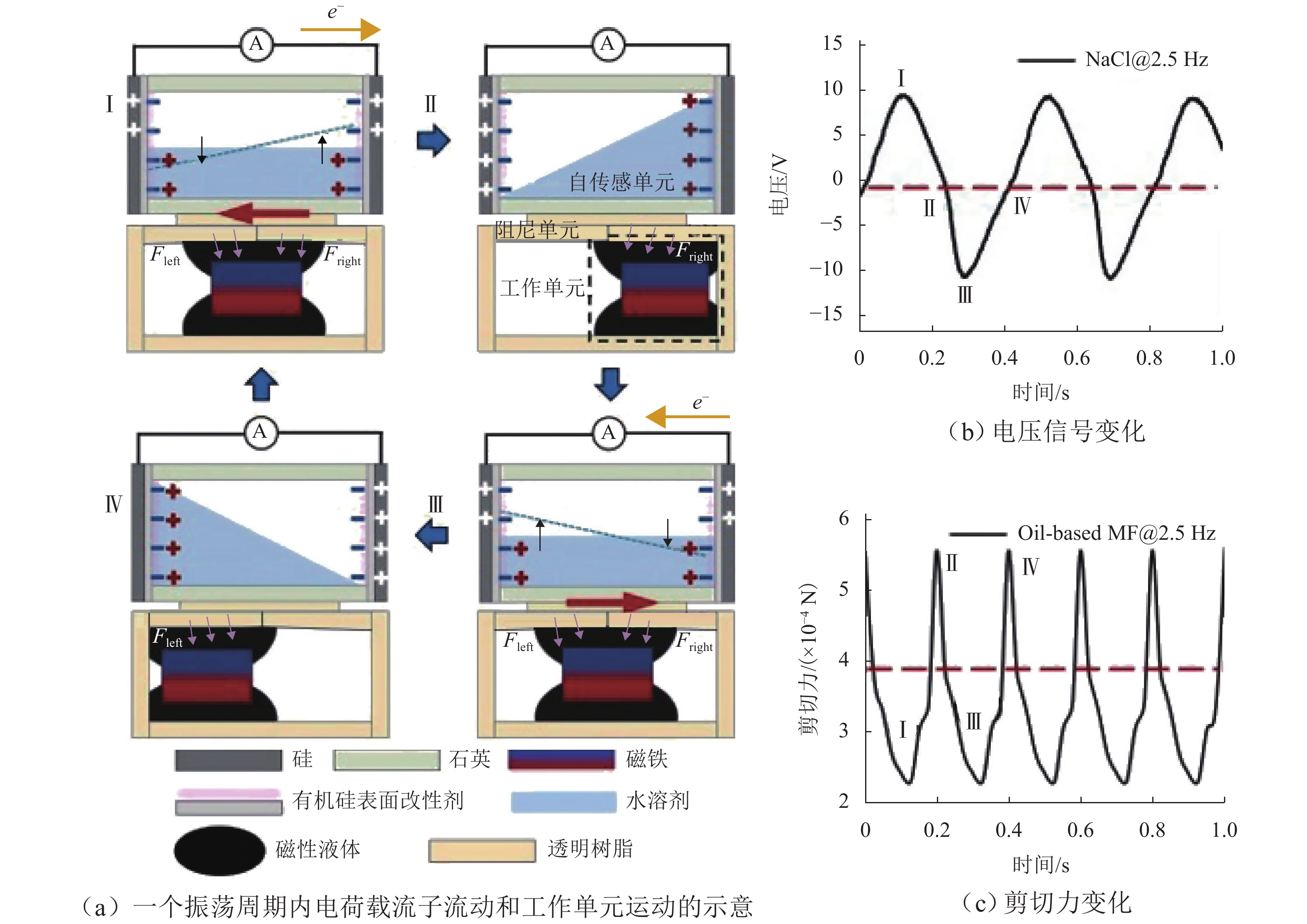
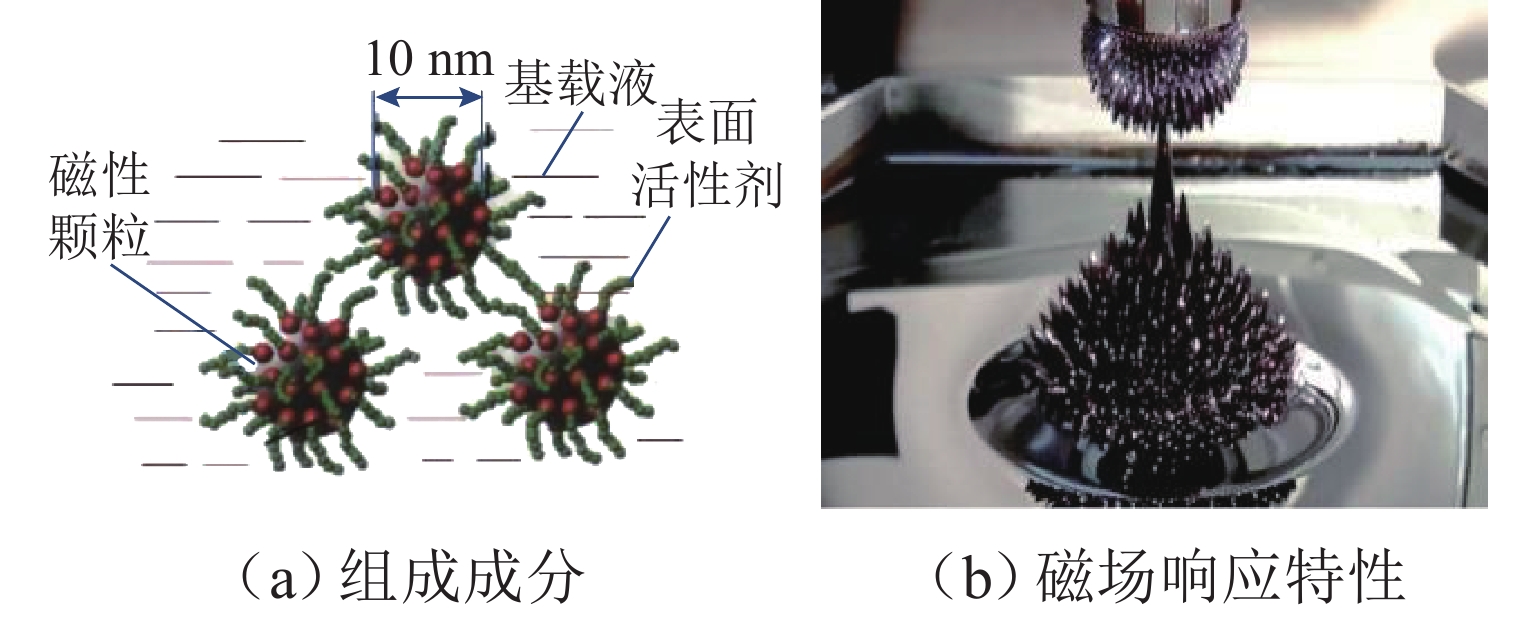
Magnetic fluid vibration energy harvesters demonstrate distinct technical advantages in low-frequency vibration environments and broad application prospects in fields such as mechanical vibration monitoring, micro-nano sensors, and power supply for wearable devices. With the increasing energy demand and the growing prominence of environmental issues, the development of efficient and reliable vibration energy harvesting technologies has become a current research hotspot. By applying magnetic fluids to vibration energy harvesters, the frequency response threshold of the energy harvesters can be reduced, and their energy harvesting efficiency can be improved. This innovative design broadens the application scope of vibration energy harvesters and provides a stable energy source for microelectronic devices, holding significant theoretical and practical value. This paper reviewed the current research status of magnetic fluid vibration energy harvesters in China and abroad, elaborated on the latest research progress of electromagnetic and triboelectric vibration energy harvesters, and on this basis, analyzes the influence of the performance of magnetic fluid materials and wall surface characteristics on the electrical output performance of magnetic fluid vibration energy harvesters. The surface roughness and hydrophobicity of the wall material can also significantly affect the output performance of triboelectric energy harvesters. Therefore, how to optimize the performance of magnetic fluid materials and wall surface characteristics to improve the output performance of energy harvesters, and design efficient energy management systems to achieve stable energy output and effective utilization, are important research directions for the future. The future development trends of magnetic fluid vibration energy harvesters were prospected, so as to provide references for related research.