摘要:
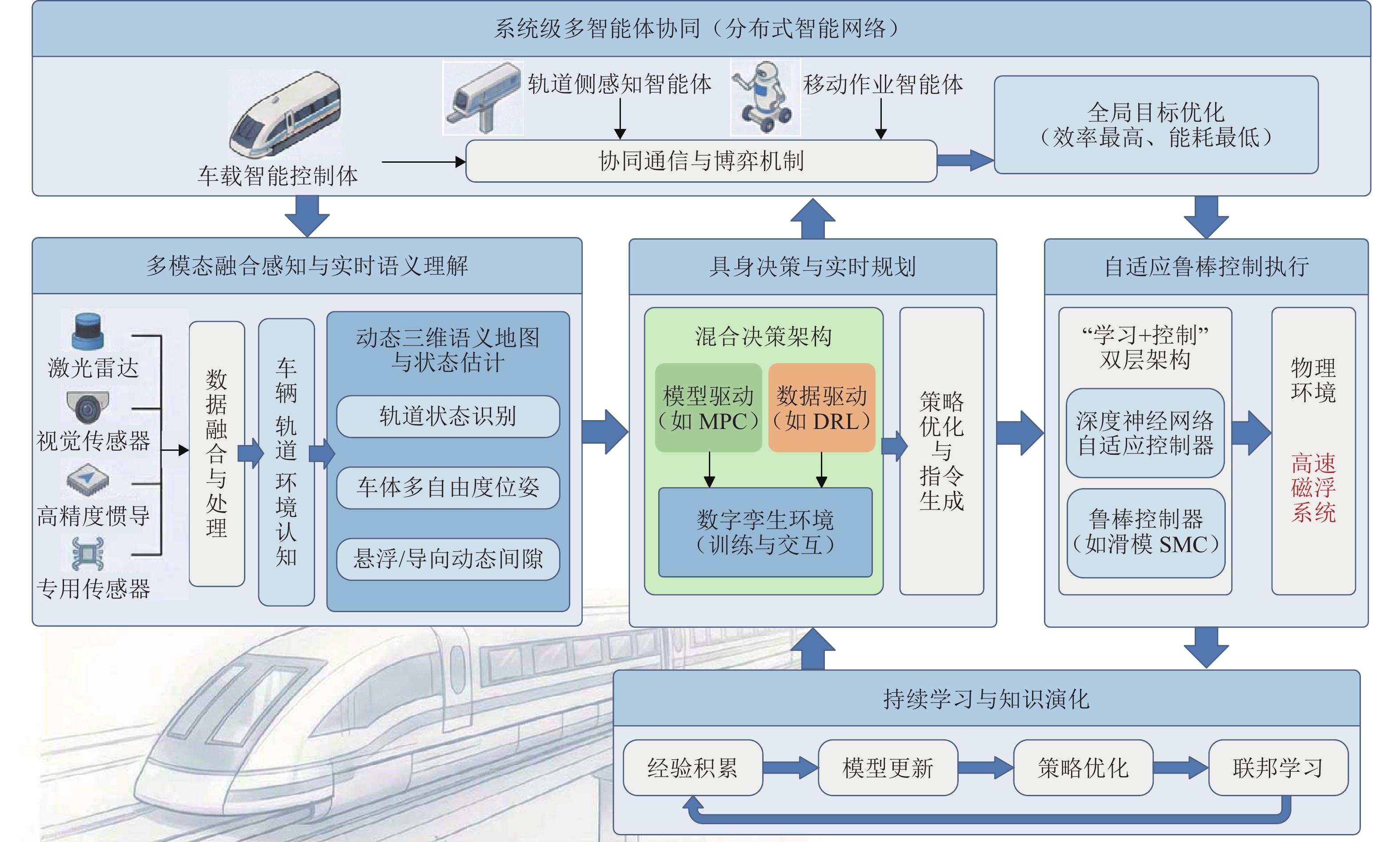
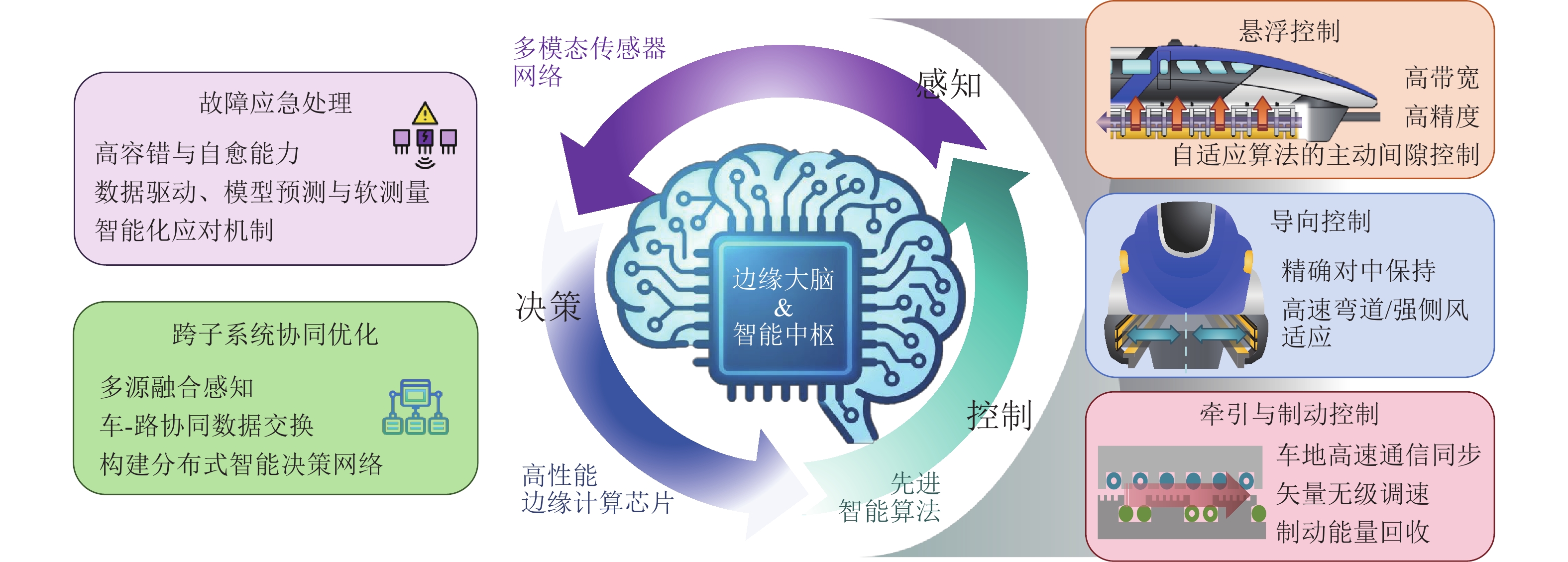
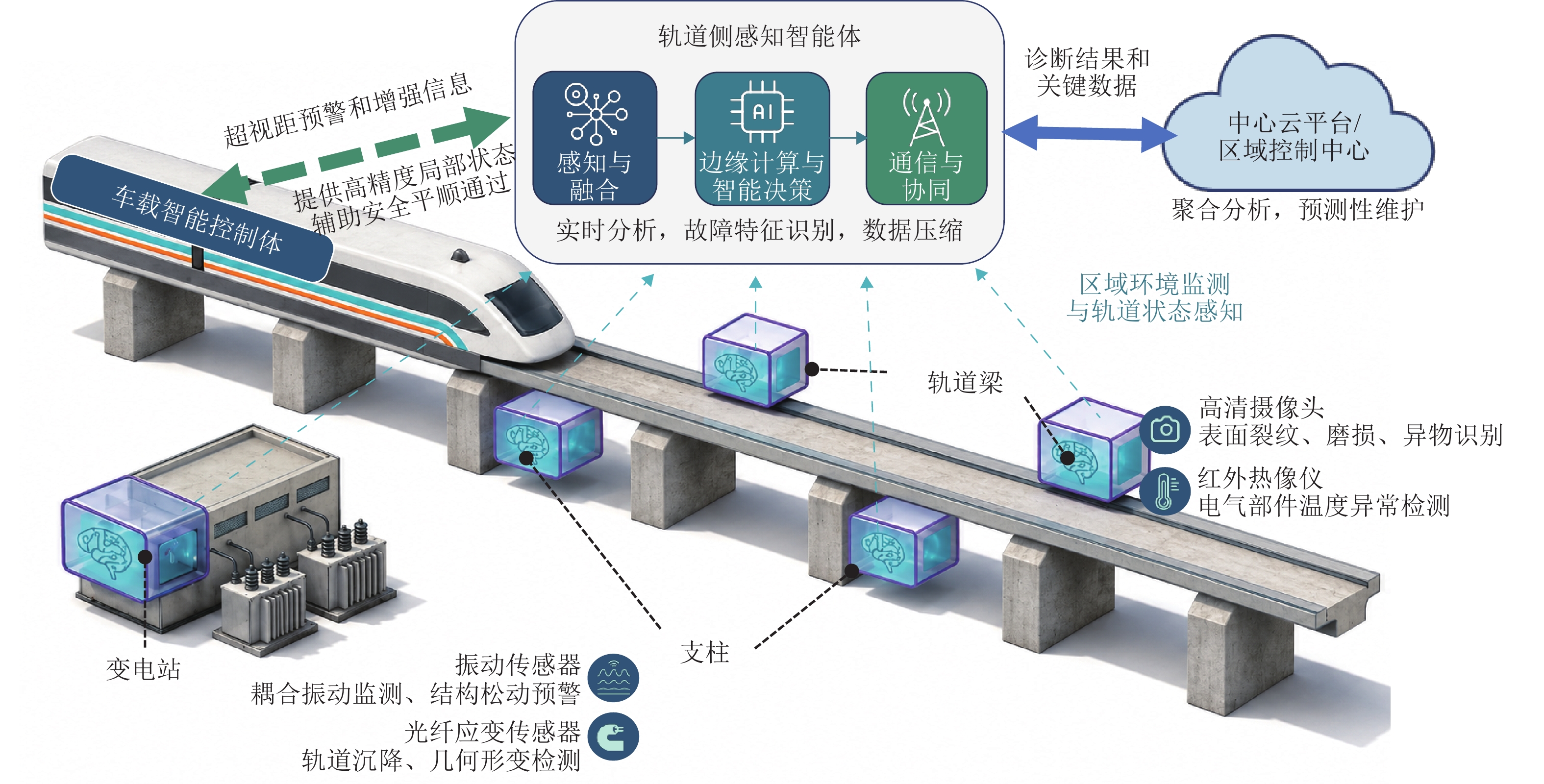
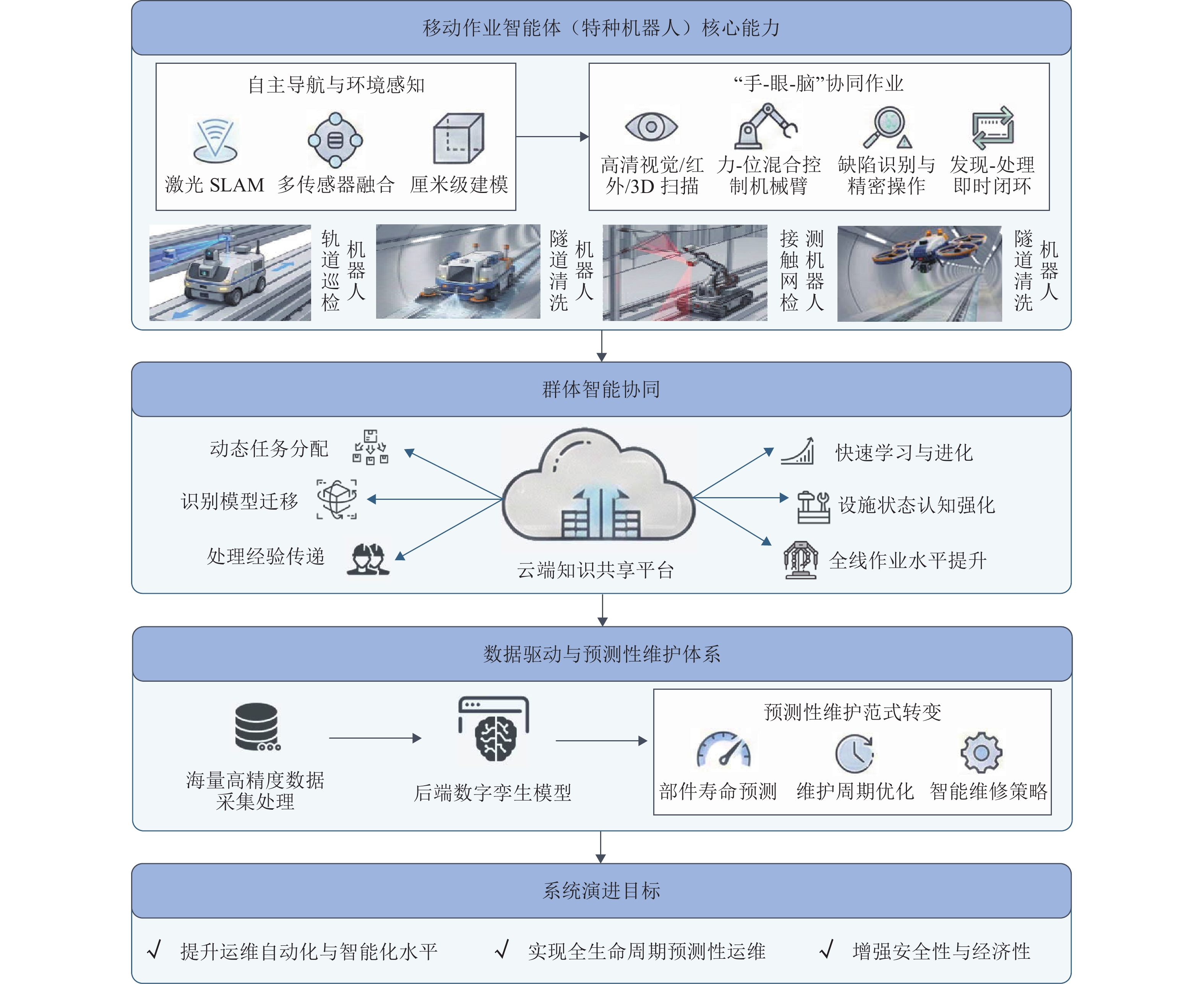
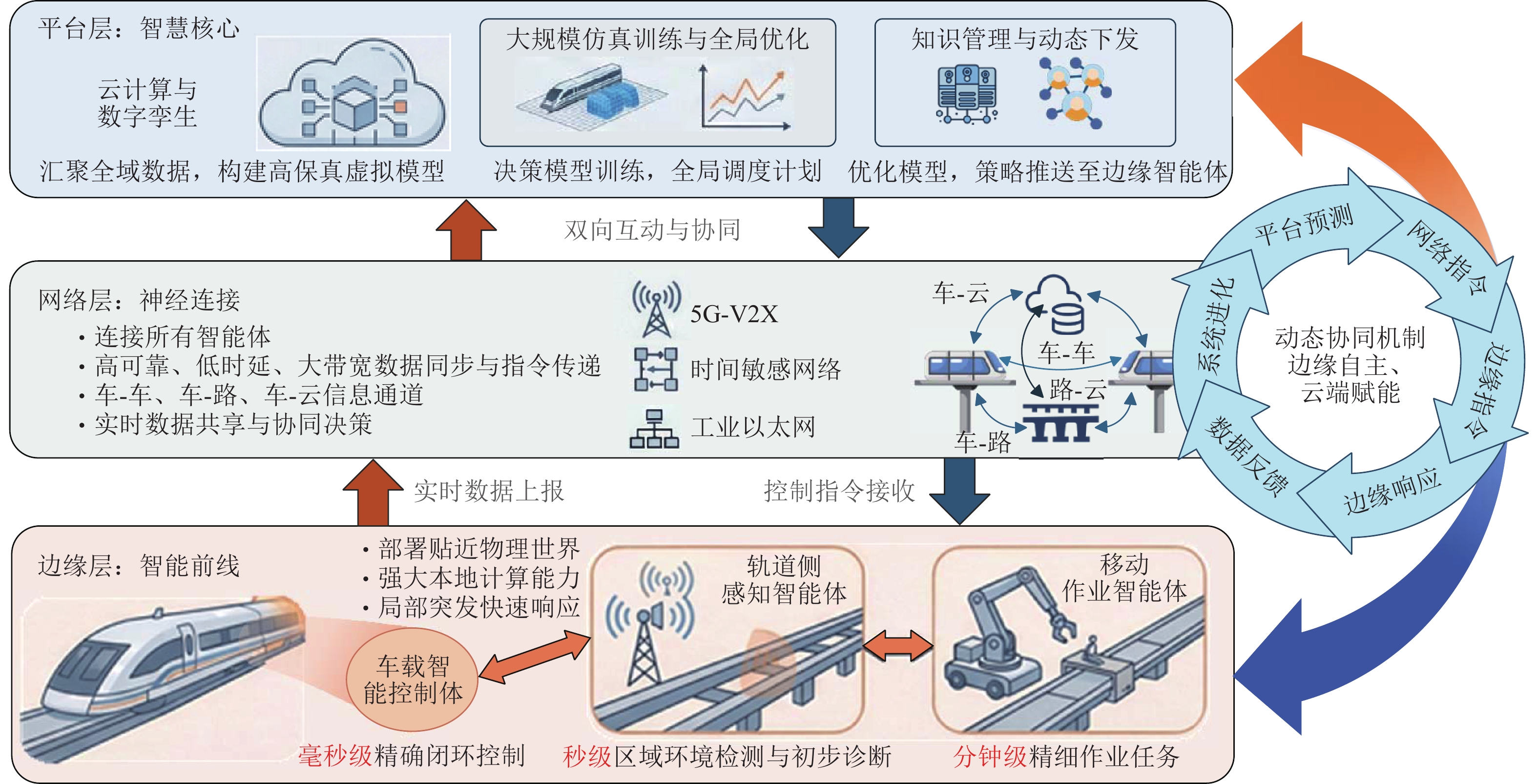
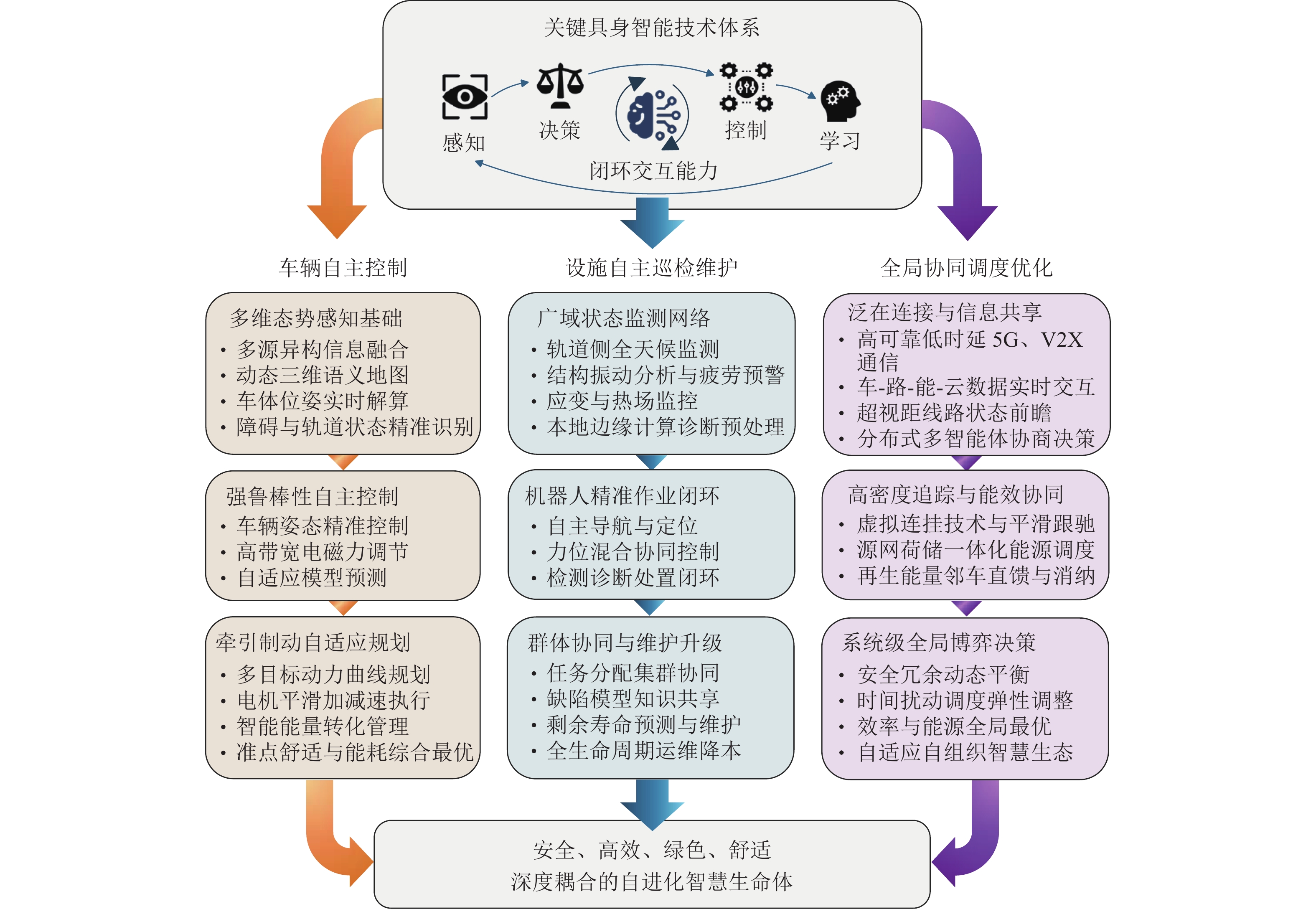
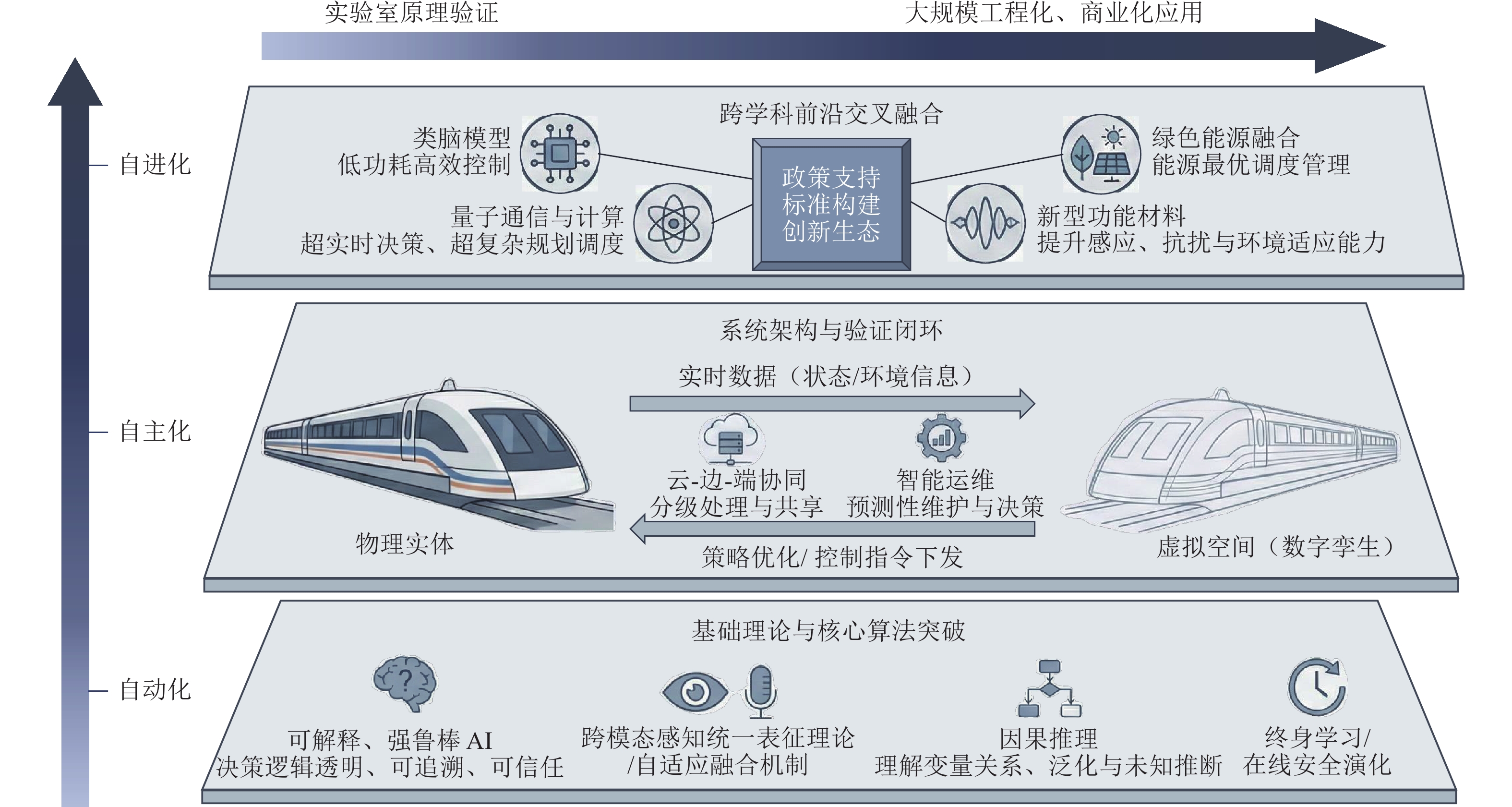
磁浮交通系统凭借非接触、高速度和低噪音等优势成为未来轨道交通的重要发展方向,其复杂运行环境、高安全要求与高运维成本对系统的自主感知、决策与控制能力提出更高要求. 在此背景下,关键具身智能作为新一代人工智能的重要范式,强调智能体(如车载智能控制体、轨道侧感知智能体与机器人)与物理环境之间的实时交互与持续学习,推动感知、决策与控制的深度融合,为磁浮交通系统智能化发展提供了新的技术路径. 在具体应用中,关键具身智能首先赋能运行安全与悬浮导向精准控制,通过融合多模态传感器数据动态构建车辆-轨道-环境态势,实现毫米级感知、状态预测以及悬浮导向与牵引制动策略的自主生成,确保极端工况下的稳定性与舒适性;其次,在基础设施自主巡检与智能维护领域,具身智能驱动的机器人或无人机可替代人工执行高风险任务,通过交互式检测识别缺陷,并基于经验预测部件寿命,优化维护周期;最后,在全局调度与协同优化方面,多个具身智能体构成分布式系统,通过共享局部感知信息,动态协商调整运行图,实现列车群高密度、协同化与能效优化运行. 综上,关键具身智能正推动磁浮交通系统从“自动化执行”向“自主化进化”转变,在提升安全性、运行效率与系统韧性的同时,有助于降低全生命周期成本,是构建下一代自适应、可进化智慧轨道交通的关键路径. 未来研究需聚焦于智能体的高可靠性验证、多智能体协同机制及在复杂环境下的鲁棒性提升,以加速其工程应用进程.


 高级检索
高级检索
 Email alert
Email alert RSS
RSS 摘要
摘要 HTML全文
HTML全文 PDF 6708KB
PDF 6708KB 附加材料
附加材料 施引文献
施引文献