

Data-Driven Parameter Tuning for Maglev Train Levitation System
-
摘要:
为了解决由于磁浮列车悬浮系统模型存在复杂非线性所带来的控制器参数整定难题,考虑仅依靠悬浮系统单次悬浮调试的输入输出数据来实现控制器参数整定,研究了基于数据驱动的磁浮列车悬浮系统快速参数整定方法. 首先,通过磁浮列车悬浮系统的建模分析了悬浮系统的开环不稳定性和复杂非线性;其次,针对虚拟参考反馈参数整定方法存在的参考模型确定问题,利用估计闭环响应方法来实现数据驱动的控制器参数整定;并且考虑到数据中存在的干扰噪声会影响控制器参数整定,提出了基于信号投影的磁悬浮系统数据噪声抑制方法;最后,以单铁磁悬浮系统为研究对象,通过单铁悬浮实验验证了本文提出的基于数据驱动的磁浮列车悬浮系统参数整定方法的有效性. 研究结果表明:悬浮系统的开环不稳定性和复杂非线性会给参数的快速整定带来较大困难;基于信号投影的噪声抑制方法能够将带噪声数据的方差降低54.1%;基于数据驱动的参数整定方法能够快速地整定好悬浮系统控制器参数,经参数整定后的系统相较于初始条件下只粗调好的PID反馈控制系统的阶跃响应超调量下降72.0%,平方误差积分 (ISE)下降79.8%,绝对误差积分 (IAE)下降54.5%.
Abstract:In order to solve the controller parameter tuning problem caused by the complex nonlinearity of the maglev train levitation system model, a data-driven fast parameter tuning method for the maglev train levitation system is proposed, which is based on only the input and output data of a single levitation tuning of the levitation system. First, the open-loop instability and complex nonlinearity of the levitation system are analyzed by modeling of the maglev train levitation system. Aiming at the problem of determining the reference model in the virtual reference feedback tuning method, estimation of the closed-loop response is then used to realize the data-driven controller parameter tuning. Considering that the interference noise in the data will affect the tuning of controller parameters, a data noise suppression method of maglev system based on signal projection is proposed. Finally, taking a single-rail levitation system for example, the effectiveness of this data-driven parameter tuning method for maglev train levitation system was verified through the single-rail levitation experiment. The results show that the open-loop instability and complex nonlinearity of the suspension system will bring great difficulties to the rapid adjustment of parameters; the noise suppression method based on signal projection can reduce the variance of noise data by 54.1%; and the parameter tuning method based on data driven technique can quickly set the controller parameters of the suspension system. Compared with the PID feedback control system with only coarse tuning under the initial conditions, the step response overshoot of the system after parameter tuning is reduced by 72.0%, the square error integral (ISE) is reduced by 79.8%, and the absolute error integral (IAE) is reduced by 54.5%.
-
Key words:
- levitation system /
- data driven /
- parameter tuning /
- virtual reference feedback /
- signal projection
-

图 1 磁浮列车悬浮系统单转向架机械解耦结构示意
Figure 1. Schematic diagram of mechanical decoupling structure of single bogie of maglev train levitation system
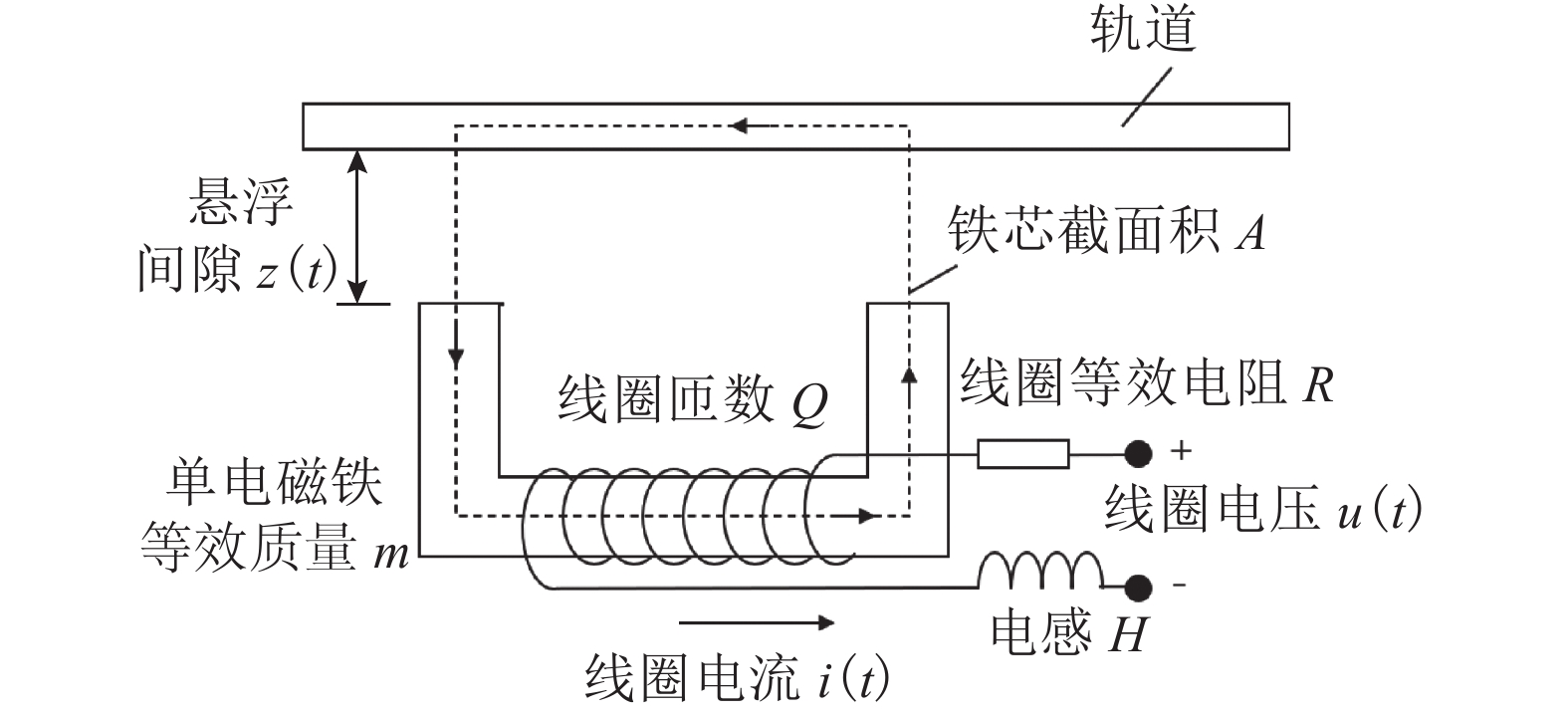
图 2 磁浮列车单点悬浮系统模型示意
Figure 2. Schematic diagram of single-point levitation system model of maglev train
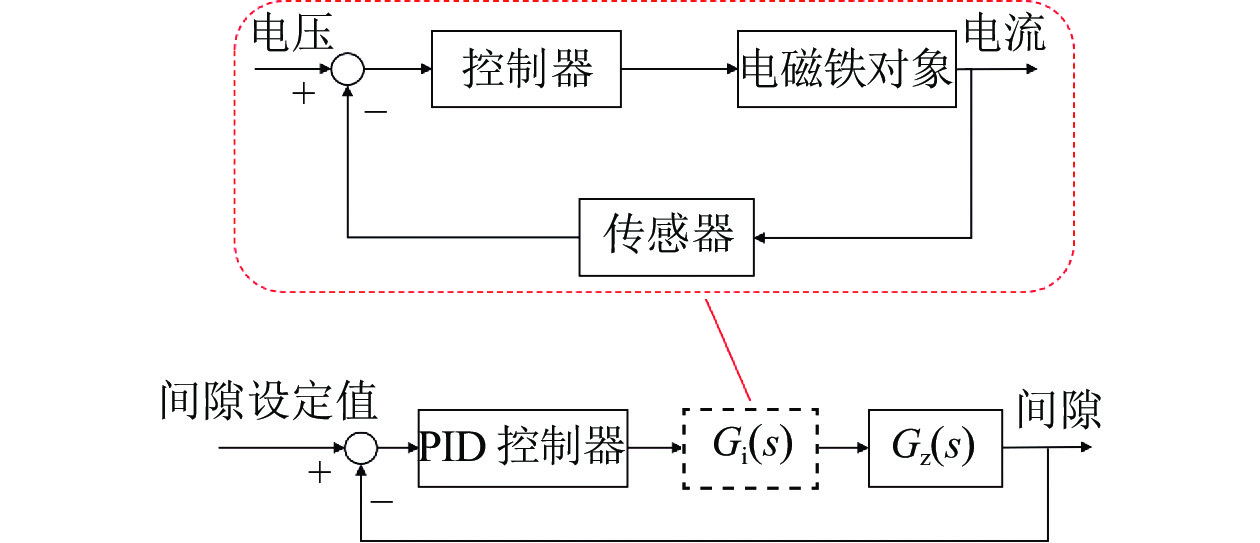
图 3 带有电流负反馈内环的悬浮系统闭环反馈示意
Figure 3. Closed loop feedback diagram of levitation system with negative current feedback inner loop

图 5 基于悬浮系统输入输出数据的控制器参数整定原理示意
Figure 5. Schematic diagram of controller parameter tuning based on input and output data of levitation system
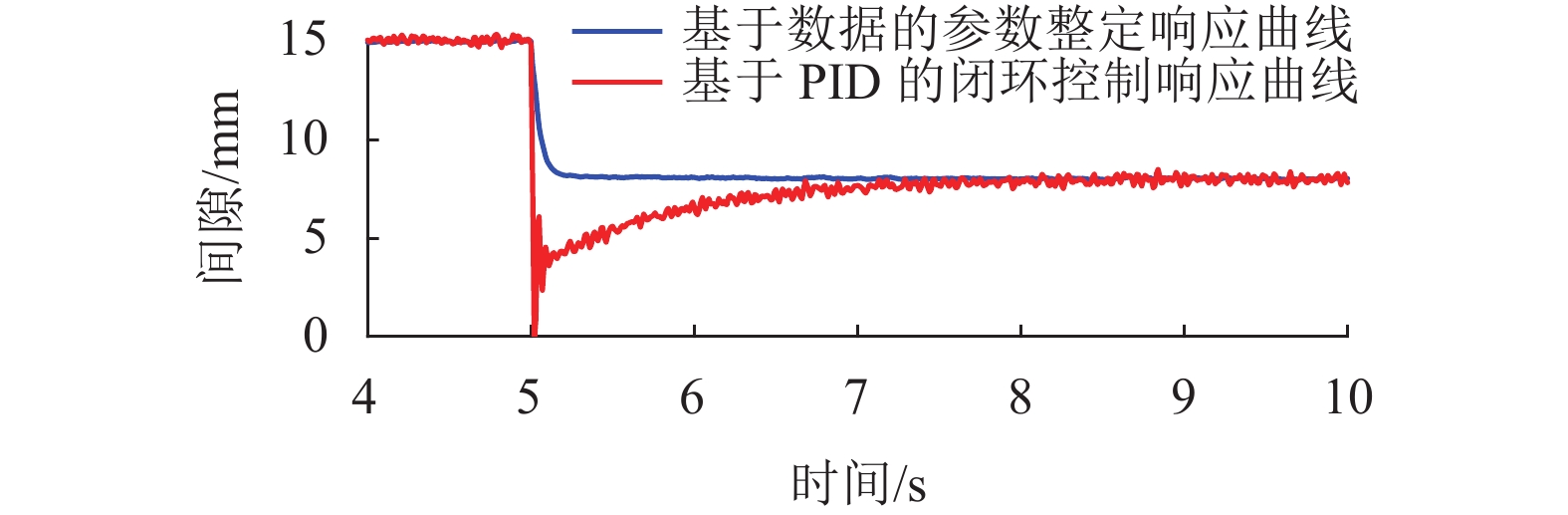
图 7 悬浮控制器参数整定后单点悬浮系统闭环响应仿真曲线
Figure 7. Simulation curves of closed-loop response of single-point levitation system before and after levitation controller parameter tuning
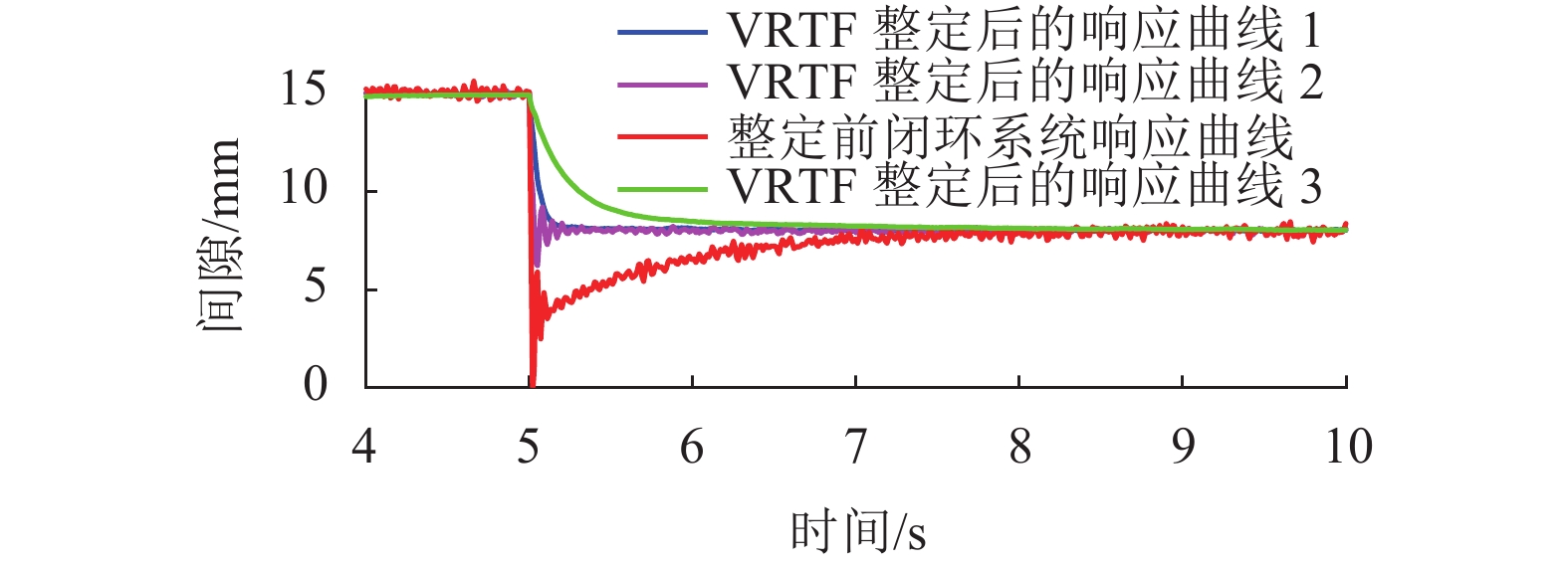
图 8 单点悬浮系统闭环响应仿真曲线
Figure 8. Simulation curves of closed-loop response of single point levitation system
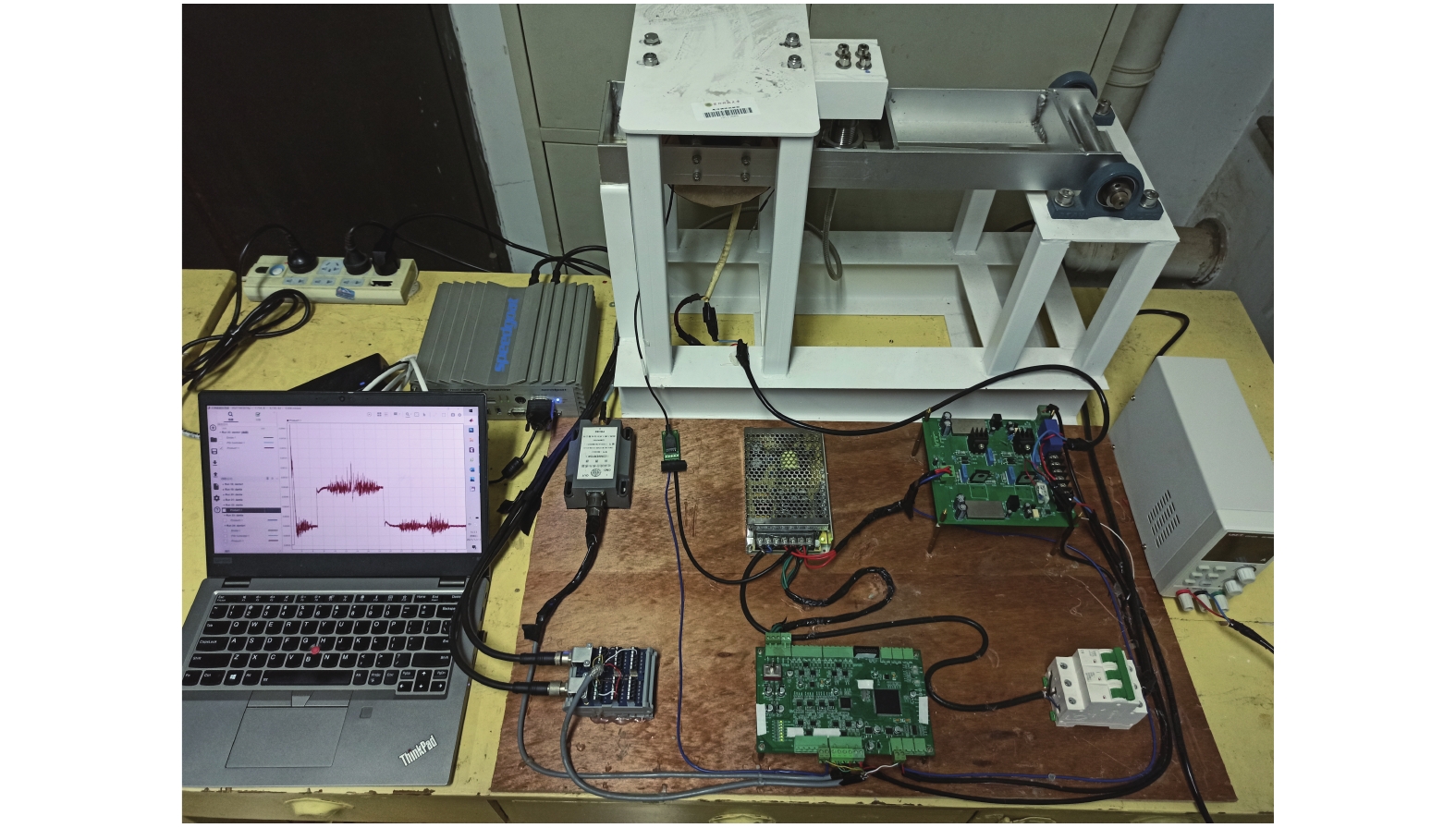
图 9 单铁磁悬浮系统悬浮控制实验装置
Figure 9. Experimental device for levitation control of single-iron magnetic levitation system
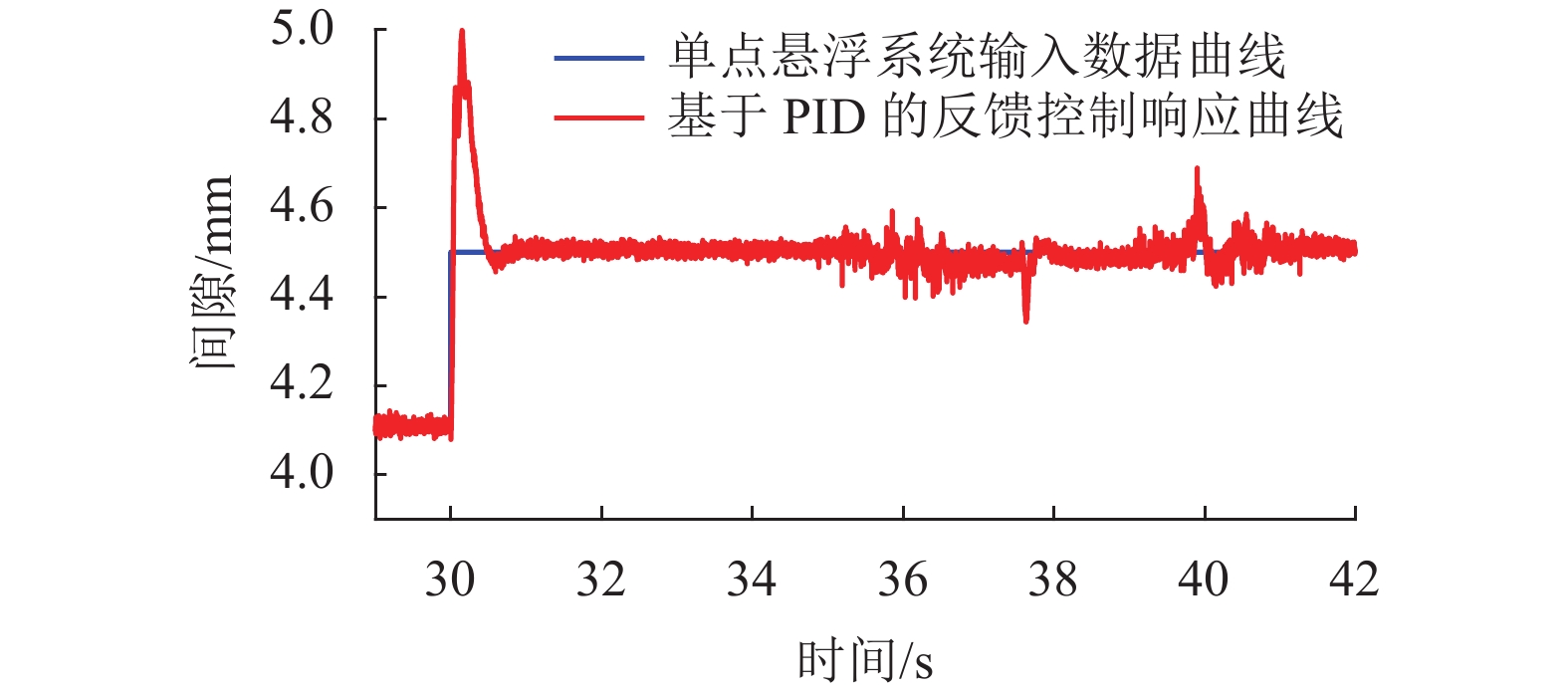
图 10 基于PID的单点悬浮系统闭环反馈控制响应实验曲线
Figure 10. Experimental response curves of closed loop feedback control of single-point levitation system based on PID
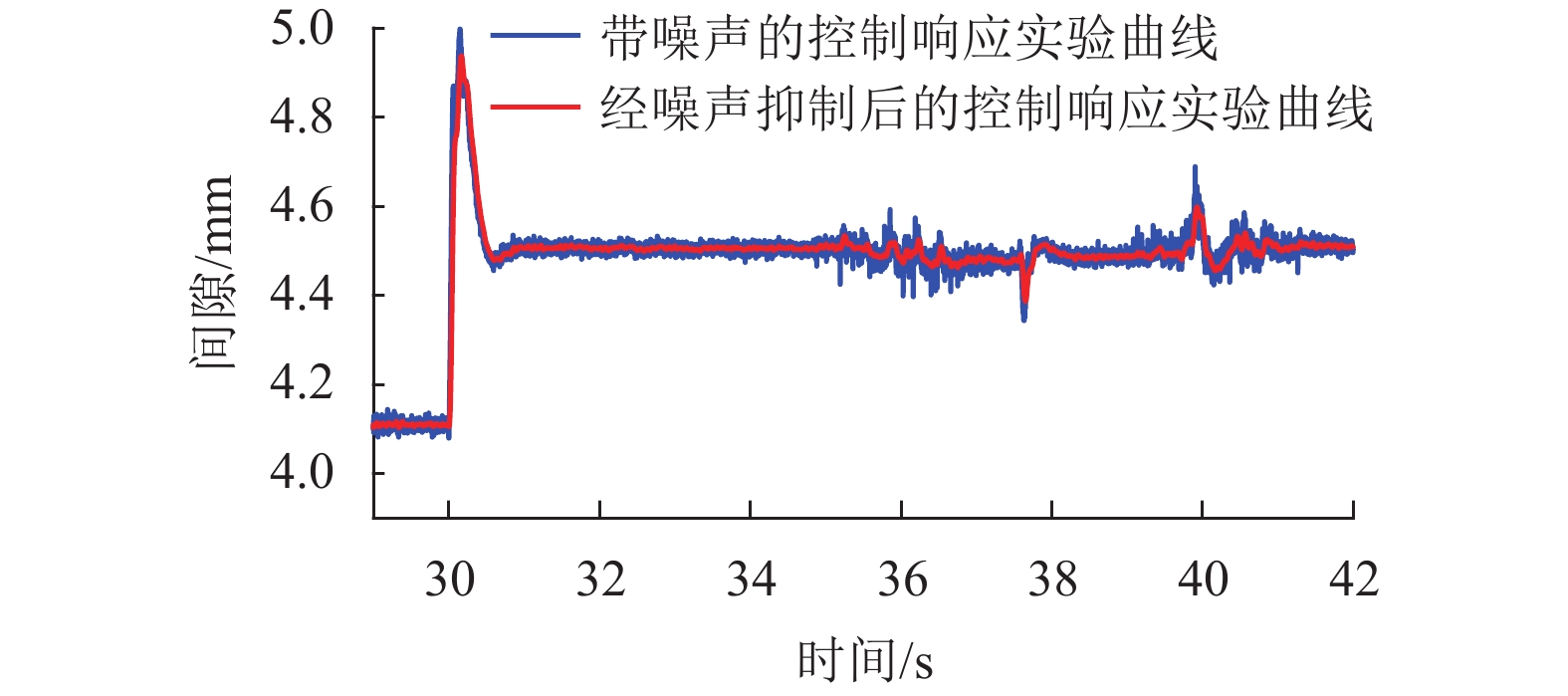
图 11 经噪声抑制处理后的单点悬浮系统闭环反馈控制响应实验曲线
Figure 11. Experimental response curves of closed-loop feedback control of single-point levitation system after noise suppression

图 12 悬浮控制器参数整定前、后单点悬浮系统闭环响应实验曲线
Figure 12. Experimental curves of closed-loop response of single-point levitation system before and after parameter tuning of levitation controller
表 1 悬浮控制性能指标
Table 1. Levitation control performance indexes
参数整定状态 ISE IAE 前 10.104 6 5.302 9 后 1.712 4 1.442 7  下载: 导出CSV
下载: 导出CSV
表 2 参数整定前、后单点悬浮系统的悬浮控制性能指标
Table 2. Levitation control performance indexes of single-point levitation system before and after parameter tuning
参数整定状态 ISE IAE 前 0.0810 0.2585 后 0.0164 0.1176
下载: 导出CSV
-
[1] FORMENTIN S, VAN HEUSDEN K, KARIMI A. A comparison of model-based and data-driven controller tuning[J]. International Journal of Adaptive Control and Signal Processing, 2014, 28(10): 882-897. doi: 10.1002/acs.2415 [2] HJALMARSSON H, GEVERS M, GUNNARSSON S, et al. Iterative feedback tuning: theory and applications[J]. IEEE Control Systems Magazine, 1998, 18(4): 26-41. doi: 10.1109/37.710876 [3] RADAC M B, PRECUP R E, PETRIU E M, et al. Iterative data-driven controller tuning with actuator constraints and reduced sensitivity[J]. Journal of Aerospace Information Systems, 2014, 11(9): 551-564. doi: 10.2514/1.I010154 [4] CAMPI M C, LECCHINI A, SAVARESI S M. Virtual reference feedback tuning:a direct method for the design of feedback controllers[J]. Automatica, 2002, 38(8): 1337-1346. doi: 10.1016/S0005-1098(02)00032-8 [5] CAMPESTRINI L, ECKHARD D, GEVERS M, et al. Virtual reference feedback tuning for non-minimum phase plants[J]. Automatica, 2011, 47(8): 1778-1784. doi: 10.1016/j.automatica.2011.04.002 [6] SOMA S, KANEKO O, FUJII T. A new approach to parameter tuning of controllers by using one-shot experimental data-a proposal of fictitious reference iterative tuning[J]. Transactions of the Institute of Systems, Control and Information Engineers, 2004, 17(12): 528-536. doi: 10.5687/iscie.17.528 [7] VAN HEUSDEN K, KARIMI A, BONVIN D. Data-driven model reference control with asymptotically guaranteed stability[J]. International Journal of Adaptive Control and Signal Processing, 2011, 25(4): 331-351. doi: 10.1002/acs.1212 [8] SAKATOKU T, YUBAI K, YASHIRO D, et al. Proposal of Estimation of Closed-loop Response Using Input and Output Data[C]//2020 International Automatic Control Conference (CACS). Taiwan: IEEE, 2020: 1-5 [9] CHILUKA S K, AMBATI S R, SEEPANA M M, et al. A novel robust Virtual Reference Feedback Tuning approach for minimum and non-minimum phase systems[J]. ISA Transactions, 2021, 115: 163-191. doi: 10.1016/j.isatra.2021.01.018 [10] HORI T, YUBAI K, YASHIRO D, et al. Data-driven controller tuning for sensitivity minimization[C]//2016 International Conference on Advanced Mechatronic Systems (ICAMechS). Melbourne: IEEE, 2016: 132-137. [11] MATSUI Y, AYANO H, MASUDA S, et al. A controller tuning method based on finite impulse response estimation using closed-loop response data[J]. IEEJ Transactions on Electronics, Information and Systems, 2019, 139(8): 858-865. doi: 10.1541/ieejeiss.139.858 [12] KOSAKA M, KOSAKA A, KOSAKA M. Virtual time-response based iterative gain evaluation and redesign[J]. IFAC-PapersOnLine, 2020, 53(2): 3946-3952. [13] 龙志强,郝阿明,常文森. 考虑轨道周期性不平顺的磁浮列车悬浮控制系统设计[J]. 国防科技大学学报,2003,25(2): 84-89.LONG Zhiqiang, HAO Aming, CHANG Wensen. Suspension controller design of maglev train considering the rail track periodical irregularity[J]. Journal of National University of Defense Technology, 2003, 25(2): 84-89. [14] 李云钢,常文森. 磁浮列车悬浮系统的串级控制[J]. 自动化学报,1999,25(2): 247-251.LI Yungang, CHANG Wensen. Cascade control of an Ems maglev vehicle's levitation control system[J]. Acta Automatica Sinica, 1999, 25(2): 247-251. [15] 哀微,朱学峰. 在线VRFT数据驱动控制方法及其仿真研究[J]. 计算机应用研究,2011,28(4): 1254-1256,1265. doi: 10.3969/j.issn.1001-3695.2011.04.014AI Wei, ZHU Xuefeng. Research on online VRFT data-driven control method and simulation[J]. Application Research of Computers, 2011, 28(4): 1254-1256,1265. doi: 10.3969/j.issn.1001-3695.2011.04.014 [16] CHUPIN T J E. Data-driven attitude control design for multirotor UAVs[D]. Milan: Polytechnic University of Milan, 2017. [17] FORMENTIN S, COLOGNI A, BELLOLI D, et al. Fast tuning of cascade control systems[J]. IFAC Proceedings Volumes, 2011, 44(1): 10243-10248. doi: 10.3182/20110828-6-IT-1002.02761 [18] SAKATOKU T, YUBAI K, YASHIRO D, et al. Data-driven controller tuning with closed-loop response estimation[J]. IEEJ Transactions on Electrical and Electronic Engineering, 2021, 16(10): 1397-1406. doi: 10.1002/tee.23436 [19] CARE A, TORRICELLI F, CAMPI M C, et al. A toolbox for virtual reference feedback tuning (VRFT)[C]//2019 18th European Control Conference (ECC). Naples: IEEE, 2019: 4252-4257 [20] FUJIMOTO Y. Estimated response iterative tuning with signal projection[J]. IFAC Journal of Systems and Control, 2022, 19: 100179.1-100179.8. -

 下载:
下载:



 点击查看大图
点击查看大图
计量
- 文章访问数: 605
- HTML全文浏览量: 649
- PDF下载量: 52
- 被引次数: 0