摘要:
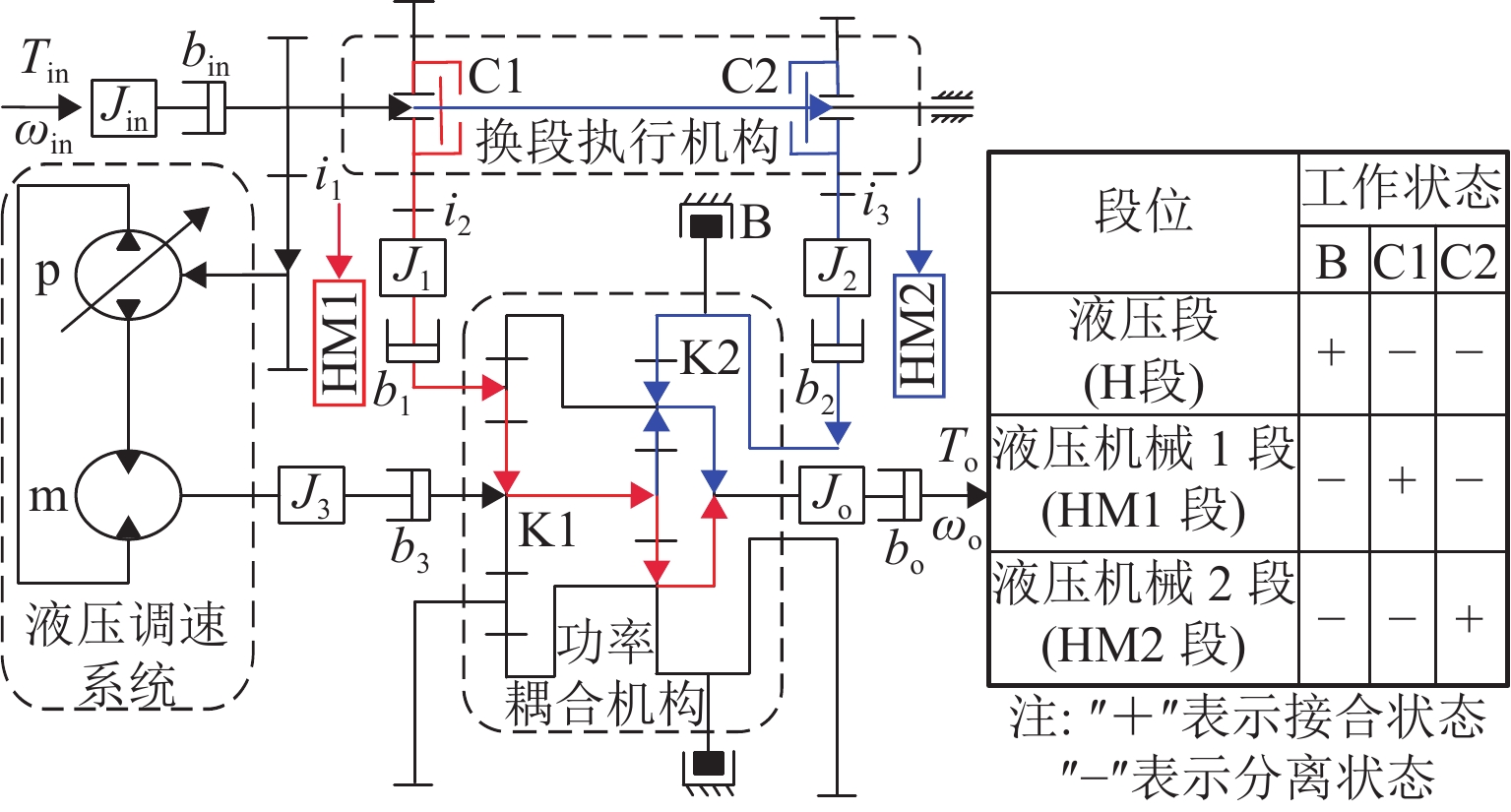
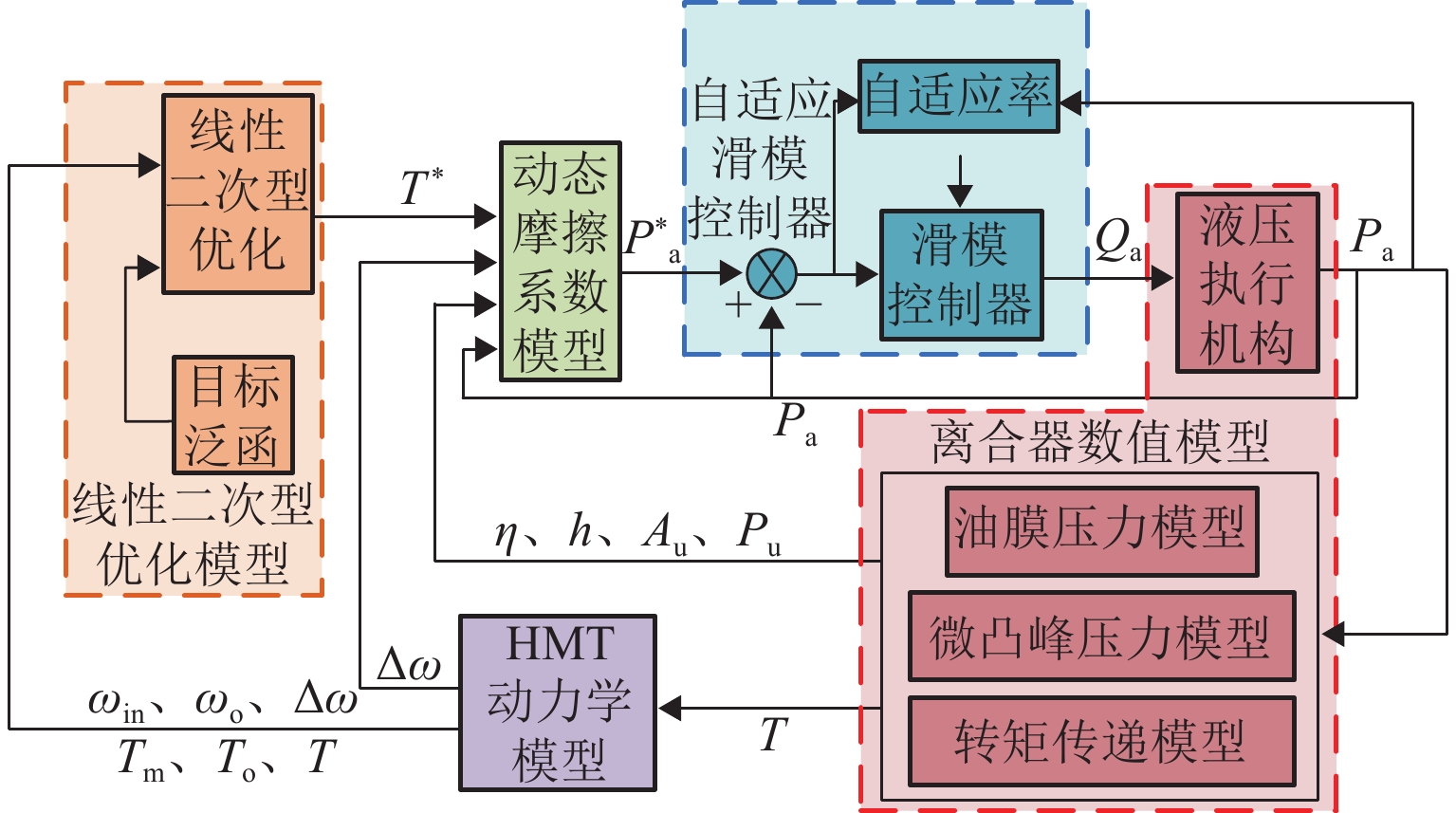
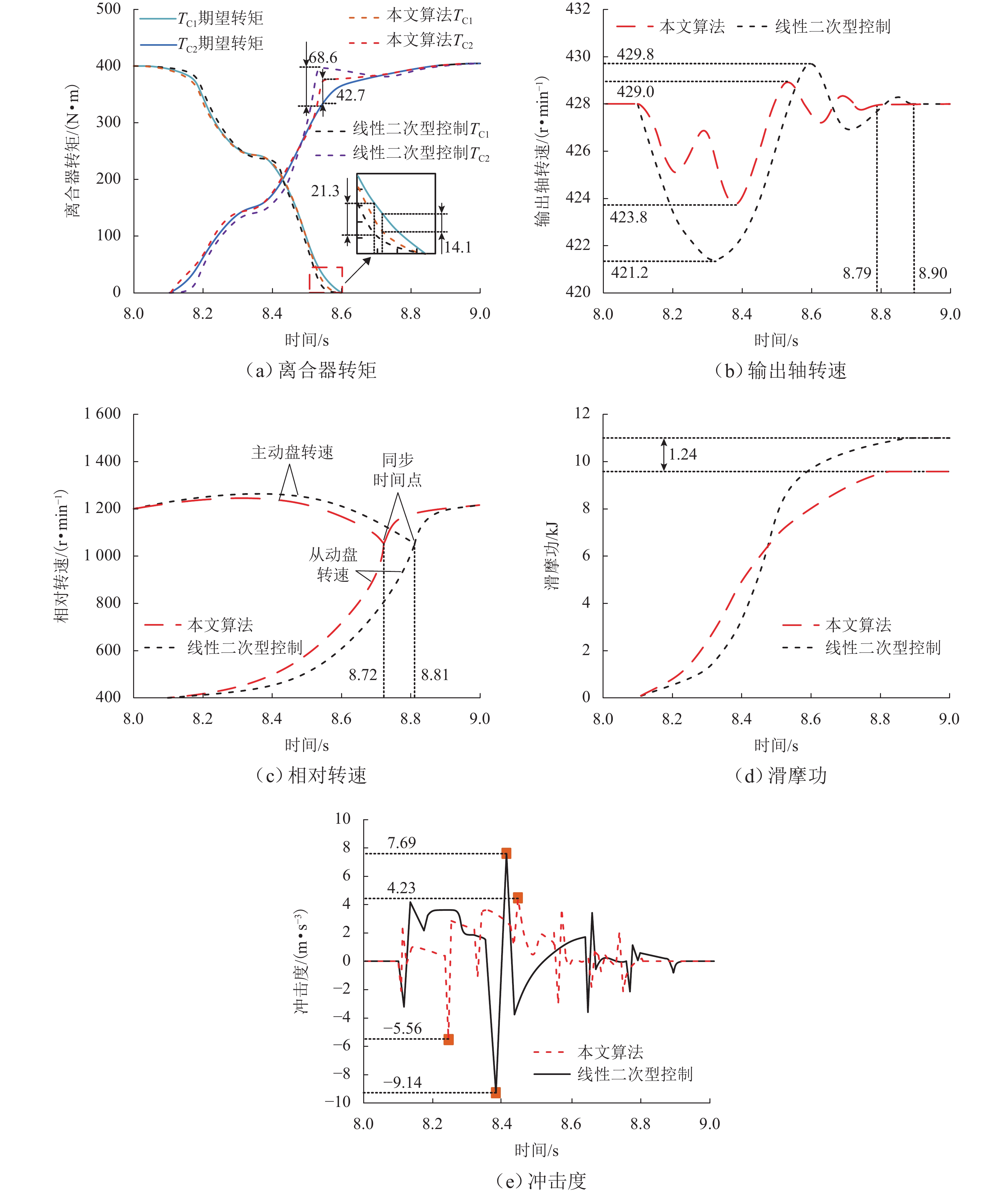
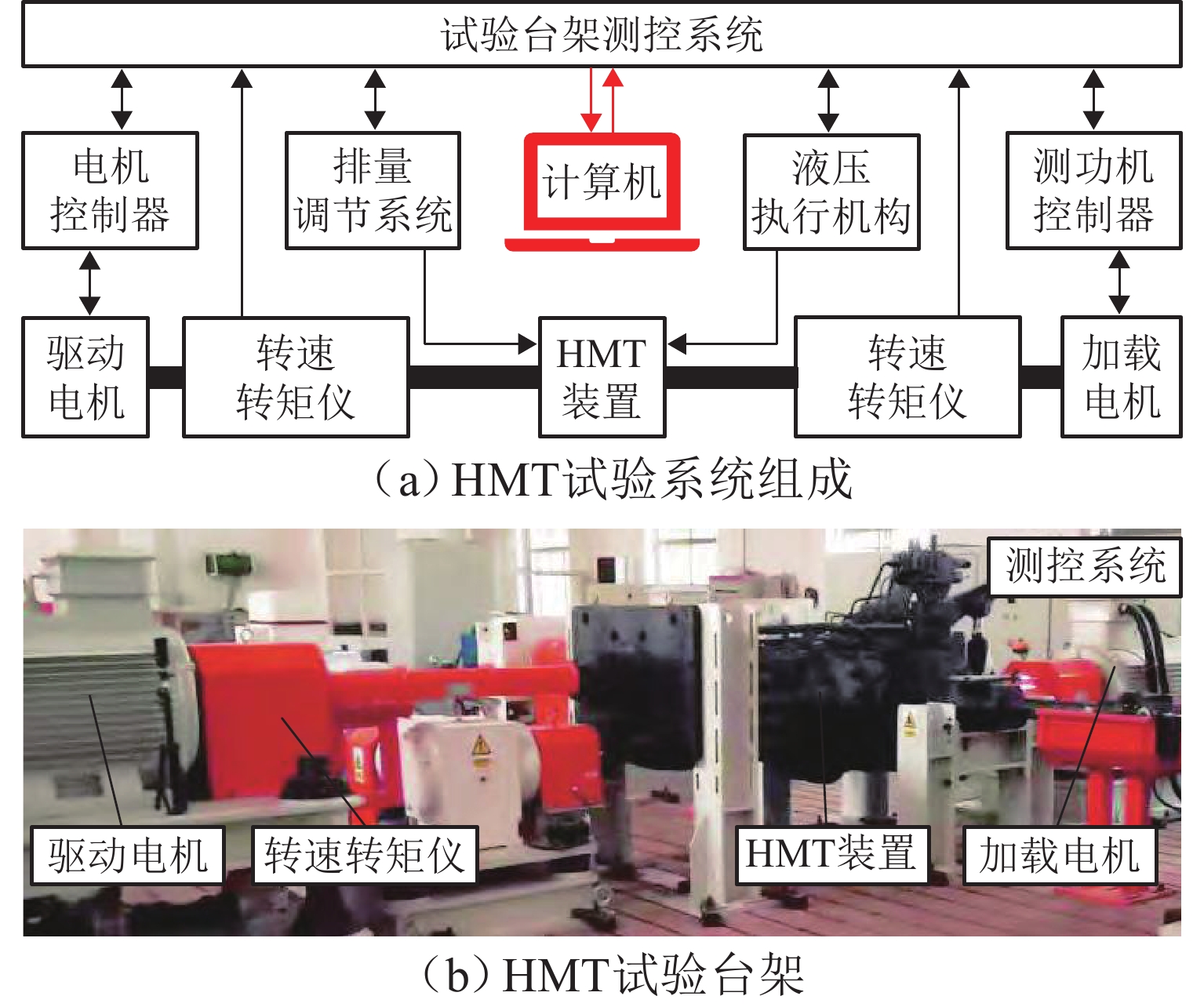
为提高液压机械传动(hydraulic mechanical transmission,HMT)换段离合器的转矩传递控制精度,改善其换段质量,提出一种基于线性二次型优化的自适应滑模控制方法. 首先,构建HMT换段动力学模型和离合器数值模型;其次,基于线性二次型优化模型求解目标泛函下换段离合器最优转矩传递轨迹,并结合动态摩擦因数模型,将该轨迹变量转换为考虑润滑油膜时变效应与摩擦界面动态接触特性的期望油压轨迹;最后,利用自适应滑模控制算法对期望油压轨迹进行跟踪控制. 仿真结果表明:与直接采用线性二次型控制方案相比,所提算法有效提高了换段离合器的转矩传递控制精度,换段时间缩短13.8%,滑摩功降低11.2%,最大冲击度减小39.1%;试验结果进一步证实,该算法在有效提高换段离合器转矩传递控制精度的同时,改善了HMT的换段质量. 研究结果可为HMT装置在工程应用中的换段控制策略制订提供参考.


 高级检索
高级检索
 Email alert
Email alert RSS
RSS 摘要
摘要 HTML全文
HTML全文 PDF 1930KB
PDF 1930KB 施引文献
施引文献