

Restraints on Seismic Performance of Slab Stone Walls of Tibetan and Qiang Residential Buildings by Reinforcement Skeleton System
-
摘要:
为保持藏羌民居片石墙原有风貌的基础上提高其抗震性能,提出采用钢筋骨架系统约束藏羌民居片石墙的构造方法. 首先,选中理县一典型石木结构的墙体为原型,并设计1/2缩尺的普通片石墙体W-1和加入钢筋骨架系统的墙体W-2;其次,对两面墙体进行对比拟静力试验,研究两者的破坏形态、滞回性能、耗能能力和变形能力;最后,通过ABAQUS有限元数值模拟得到两面墙体的骨架曲线和滞回曲线,并与试验结果进行对比分析. 结果表明:墙体在低周往复荷载作用下的破坏过程具有明显的受力阶段、裂缝萌生及扩展阶段和破坏阶段;相比于普通片石墙体,加入钢筋骨架系统的片石墙体的极限承载力、耗能性能和破坏位移分别提升了225%、183%、67%,开裂和损伤程度明显减小;数值模拟与试验得到的骨架曲线趋势相近且形状均为S形,滞回曲线形状不同,但W-2墙体滞回环面积均大于W-1墙体;数值模拟得到W-1墙体、W-2墙体的极限荷载分别为21.62 kN和78.04 kN,与试验测得极限荷载的相对误差均低于20%.
Abstract:In order to improve the seismic performance while maintaining the original style of the slab stone walls of Tibetan and Qiang residential buildings, the construction method of putting restraints on the slab stone walls of Tibetan and Qiang residential buildings by using a reinforcement skeleton system was proposed. Firstly, a typical wall of stone and wood structure in Lixian County was selected as the prototype, and a 1/2 scale ordinary slab stone wall W-1 and a wall W-2 with reinforcement skeleton system were designed. Secondly, comparative pseudo-static tests were carried out to study the failure forms, hysteretic properties, energy dissipation capacity, and deformation capacity of the two walls. Finally, the skeleton curves and hysteretic curves of the two walls were obtained by ABAQUS finite element numerical simulation and compared with the experimental results. The results show that the failure process of the wall under low cyclic load has an obvious stress stage, as well as crack initiation, expansion, and failure stages. Compared with those of the ordinary slab stone wall, the ultimate bearing capacity, energy dissipation performance, and failure displacement of the slab stone wall with reinforcement skeleton system are increased by 225%, 183%, and 67%, and the cracking and damage degree of the wall are significantly reduced. The trend of skeleton curves obtained by numerical simulation and experiment is similar, with a S-shaped pattern. The shapes of hysteretic curves are different, but the hysteretic ring area of W-2 is larger than that of wall W-1. The ultimate loads of W-1 and W-2 obtained by numerical simulation are 21.62 kN and 78.04 kN, respectively, with a relative error of less than 20% compared with the ultimate load measured by the experiment.
-
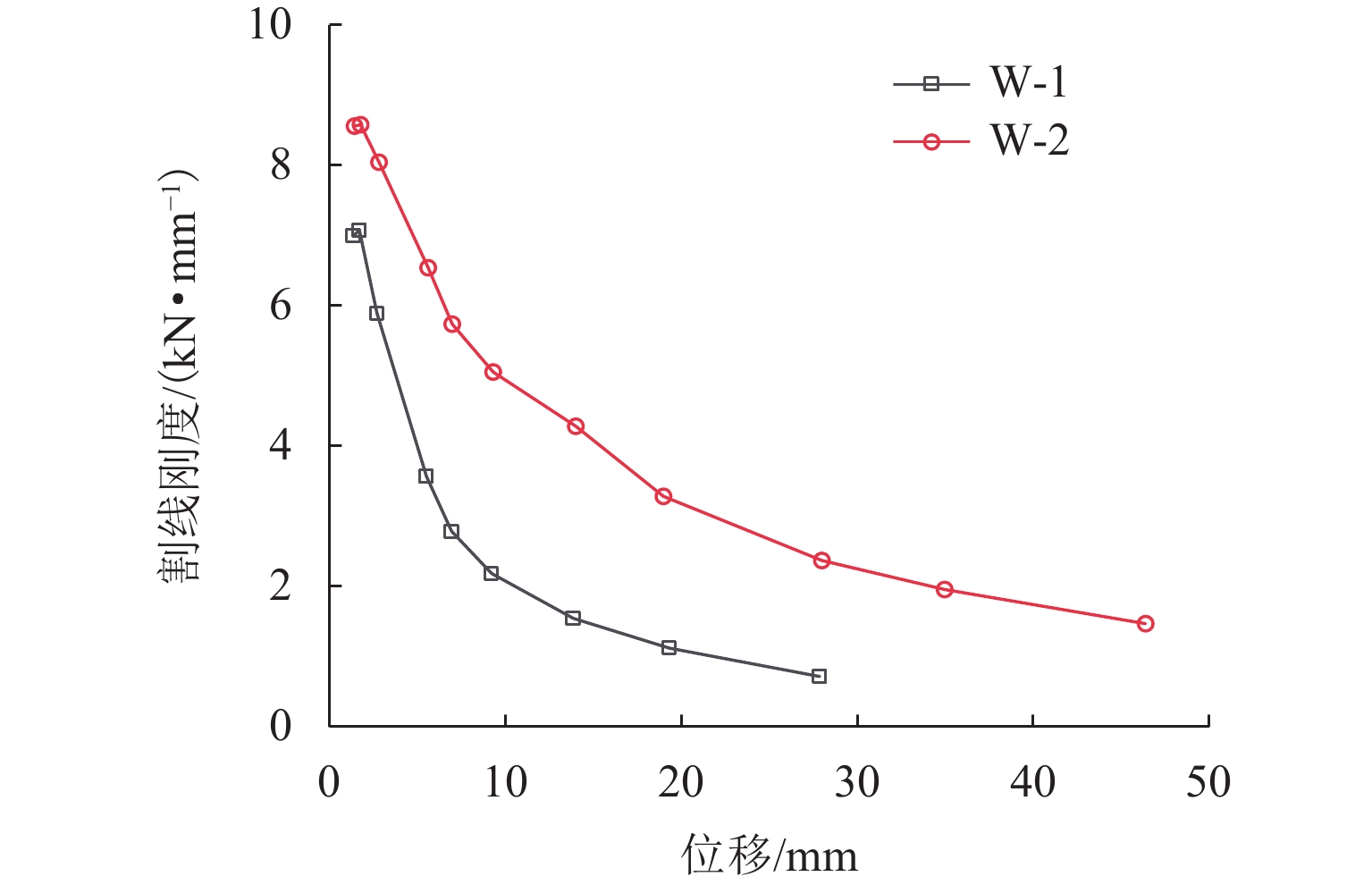
图 12 W-1、W-2墙体刚度退化曲线对比
Figure 12. Comparison of stiffness degradation curves of wall W-1 and W-2
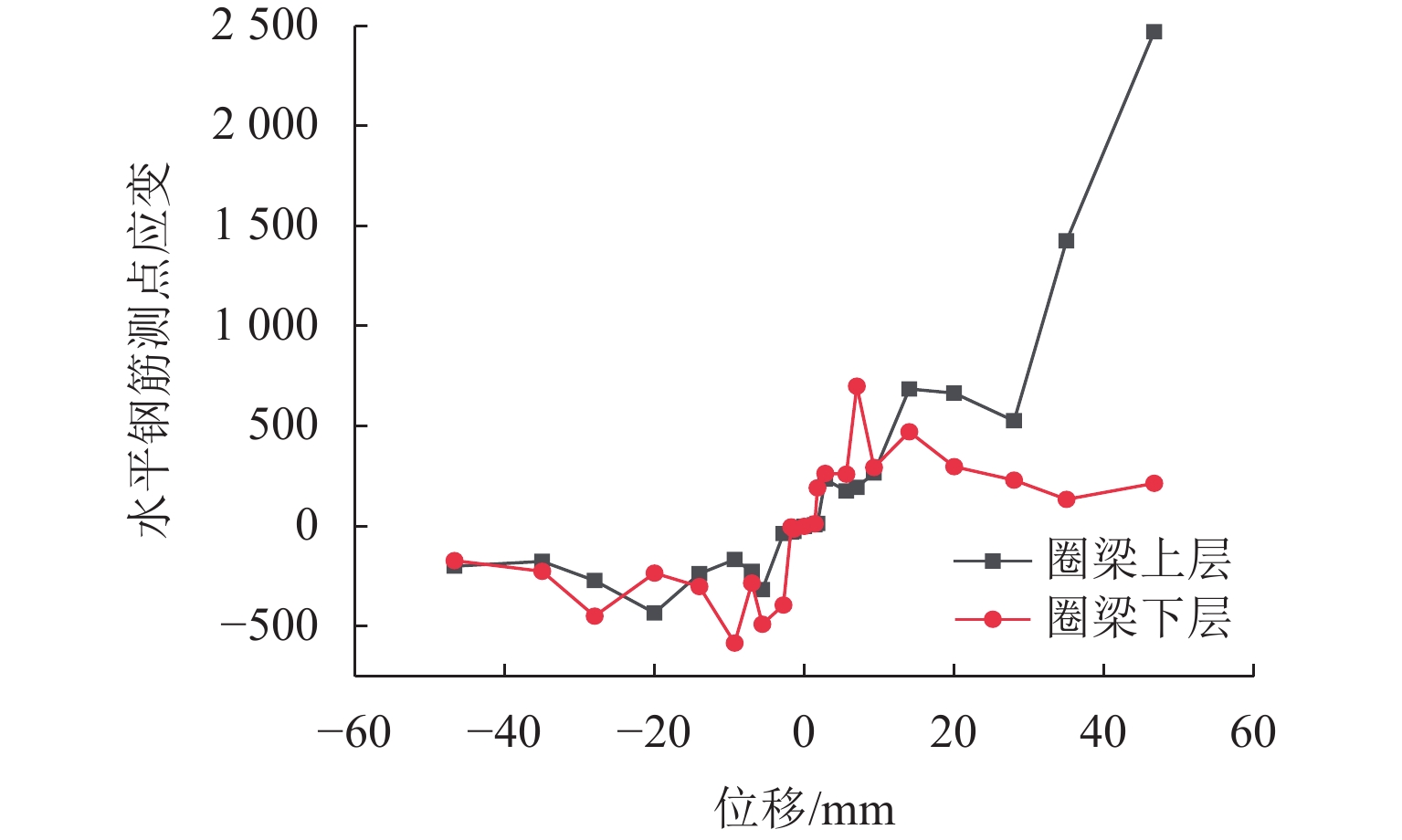
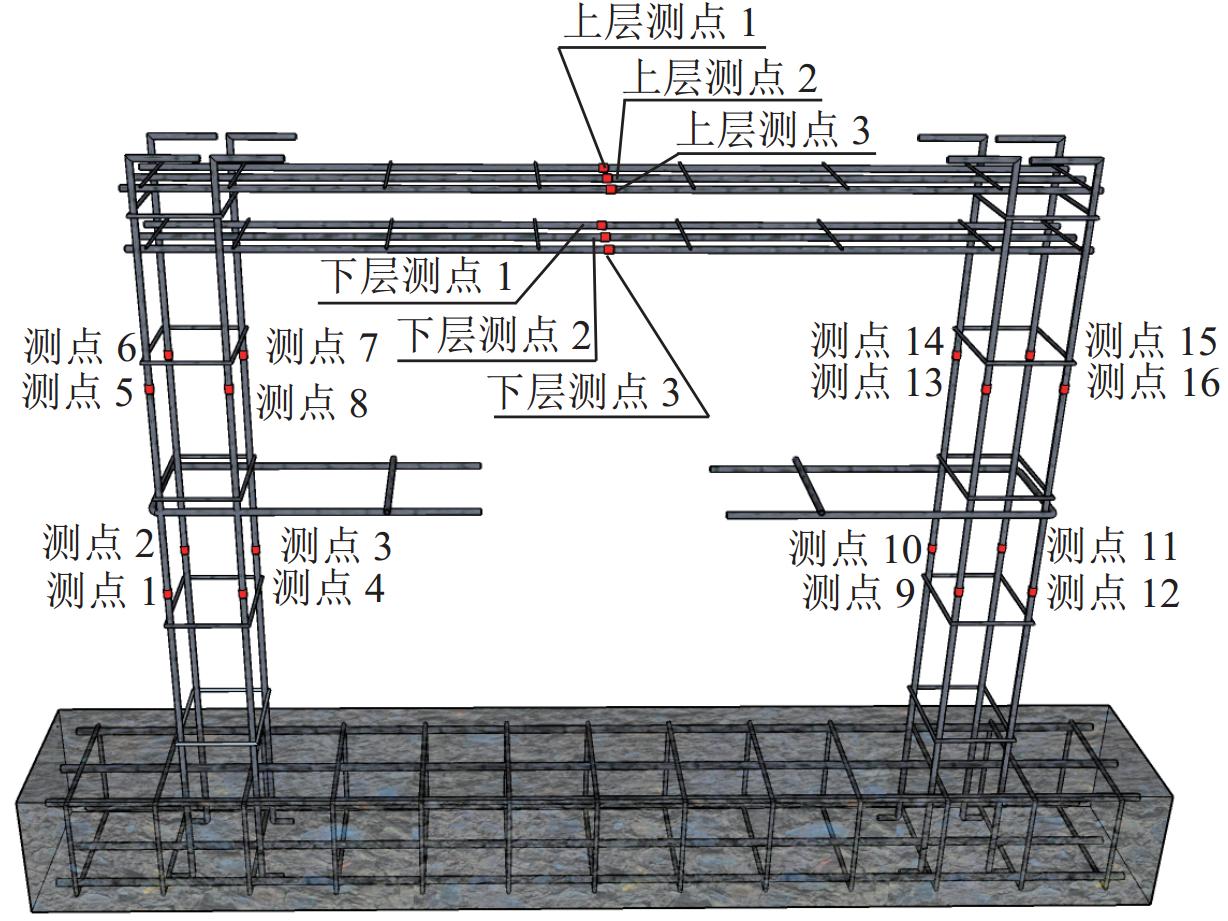
图 14 水平钢筋上、下层测点应变对比
Figure 14. Comparison of strains at upper and lower measuring points of horizontal reinforcement

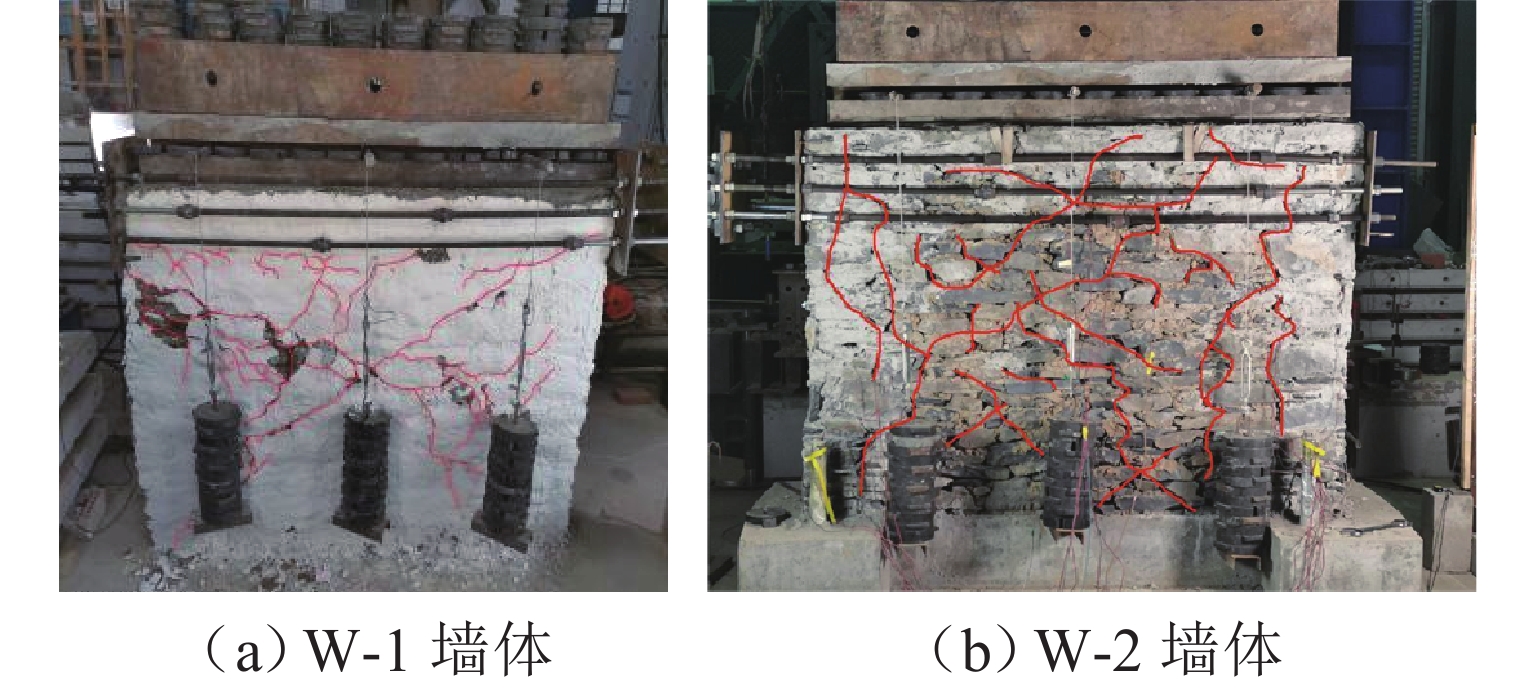
图 15 W-1墙体应力、W-2墙体应力和等效塑性应变云图
Figure 15. Stresses of wall W-1 and W-2,and equivalent plastic strain cloud maps of wall W-2
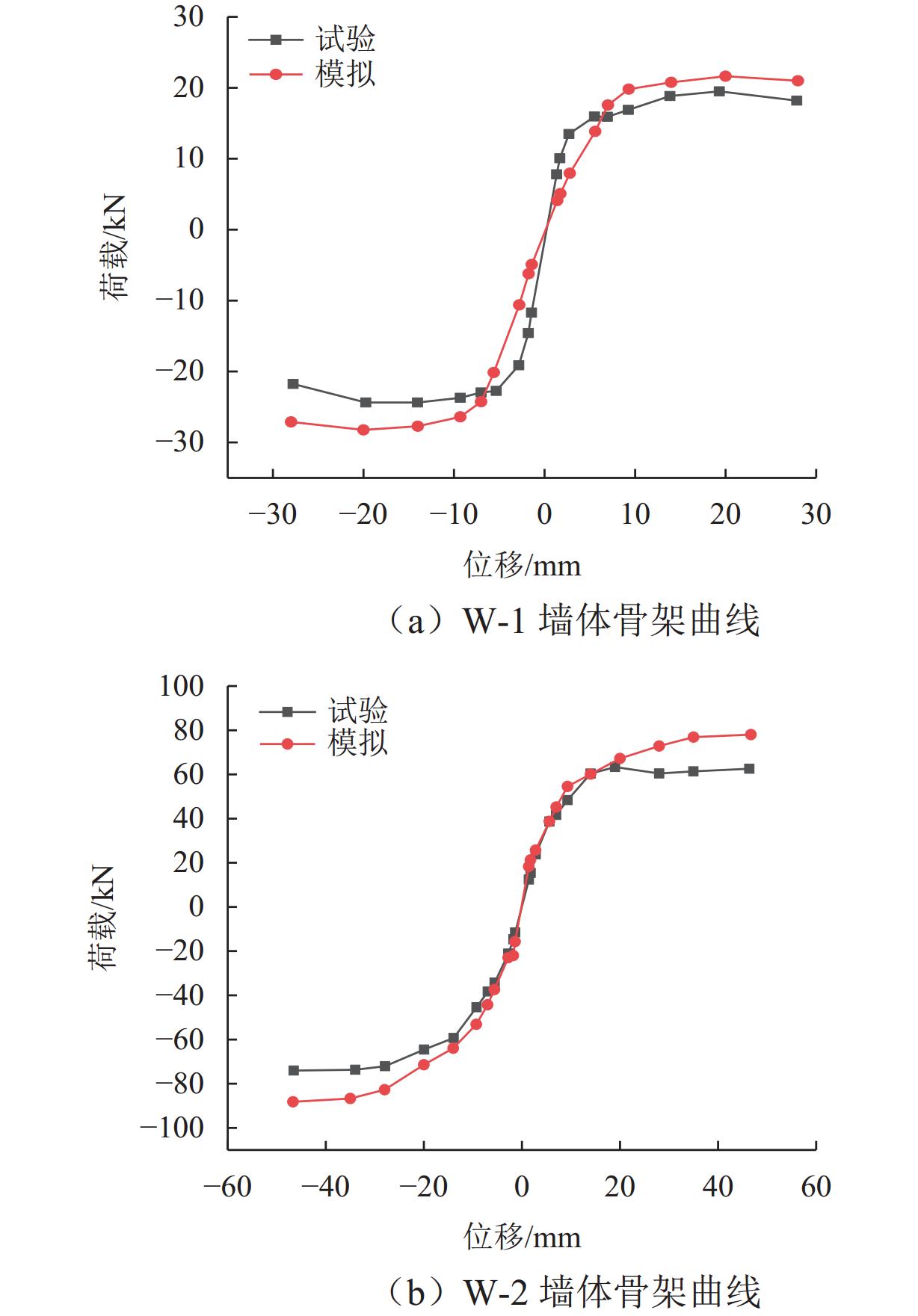
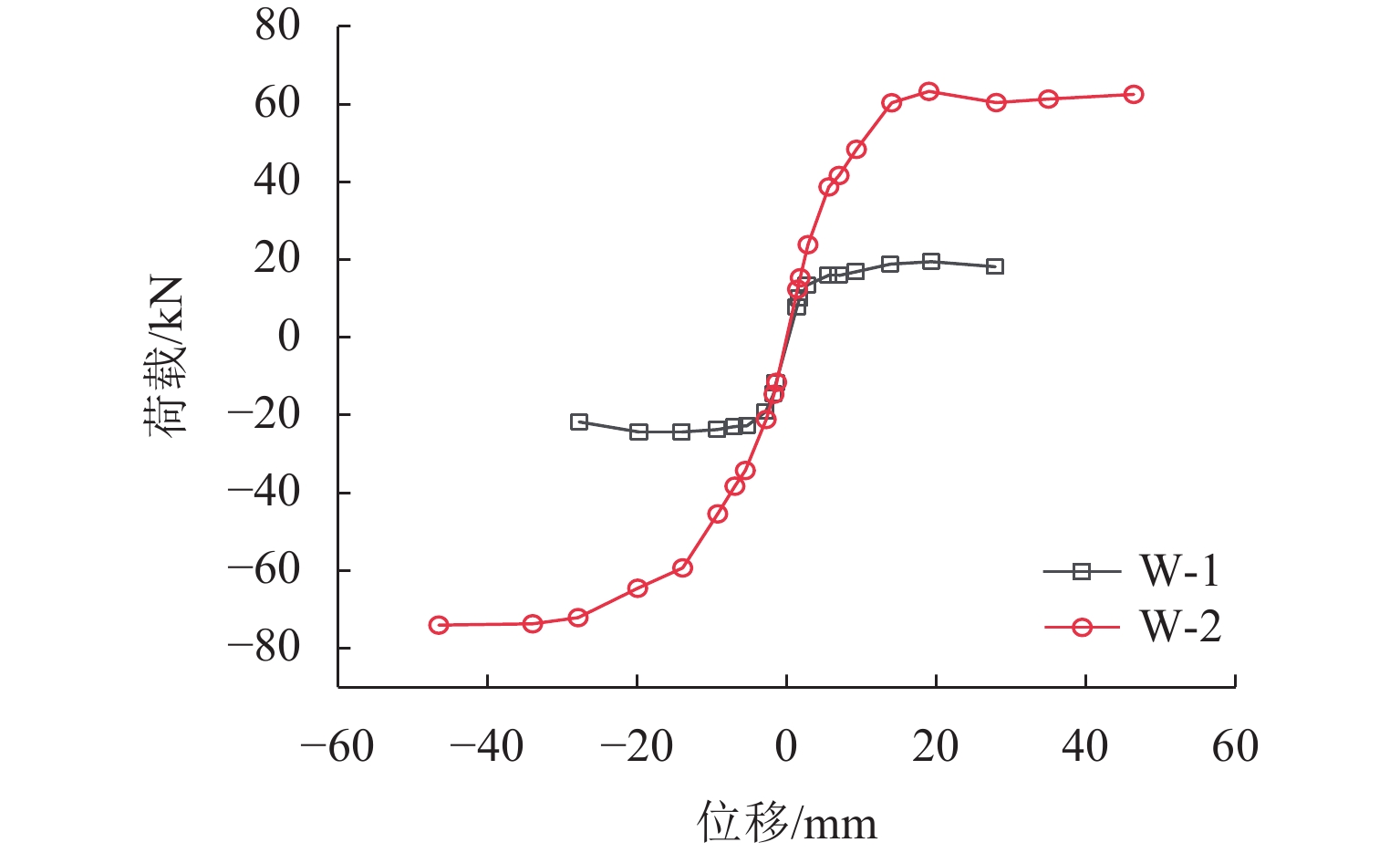
图 16 W-1、W-2墙体试验与模拟骨架曲线对比
Figure 16. Comparison between test and simulated skeleton curves of wall W-1 and W-2

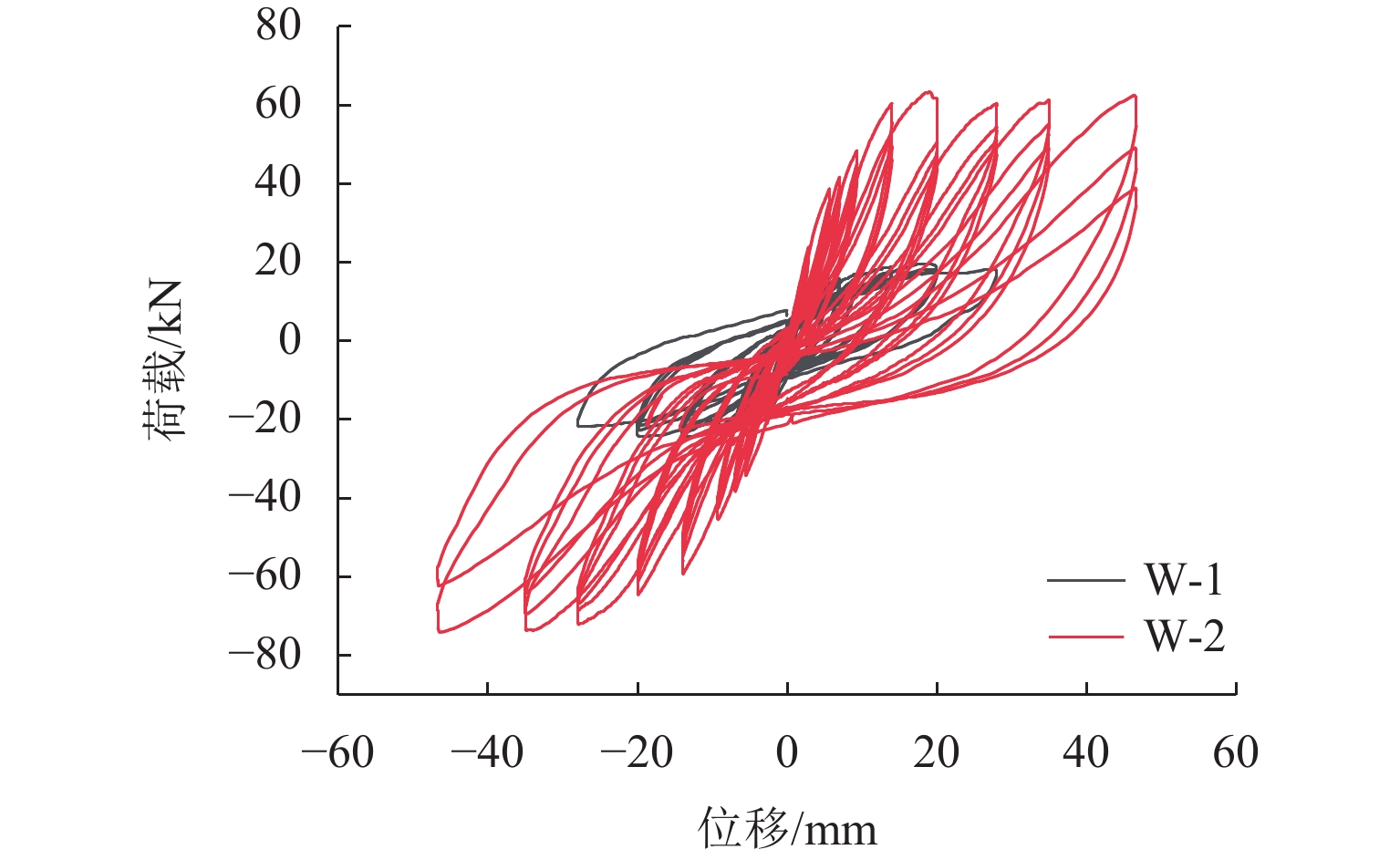
图 17 W-1、W-2墙体试验与模拟滞回曲线对比
Figure 17. Comparison between test and simulated hysteretic curves of wall W-1 and W-2
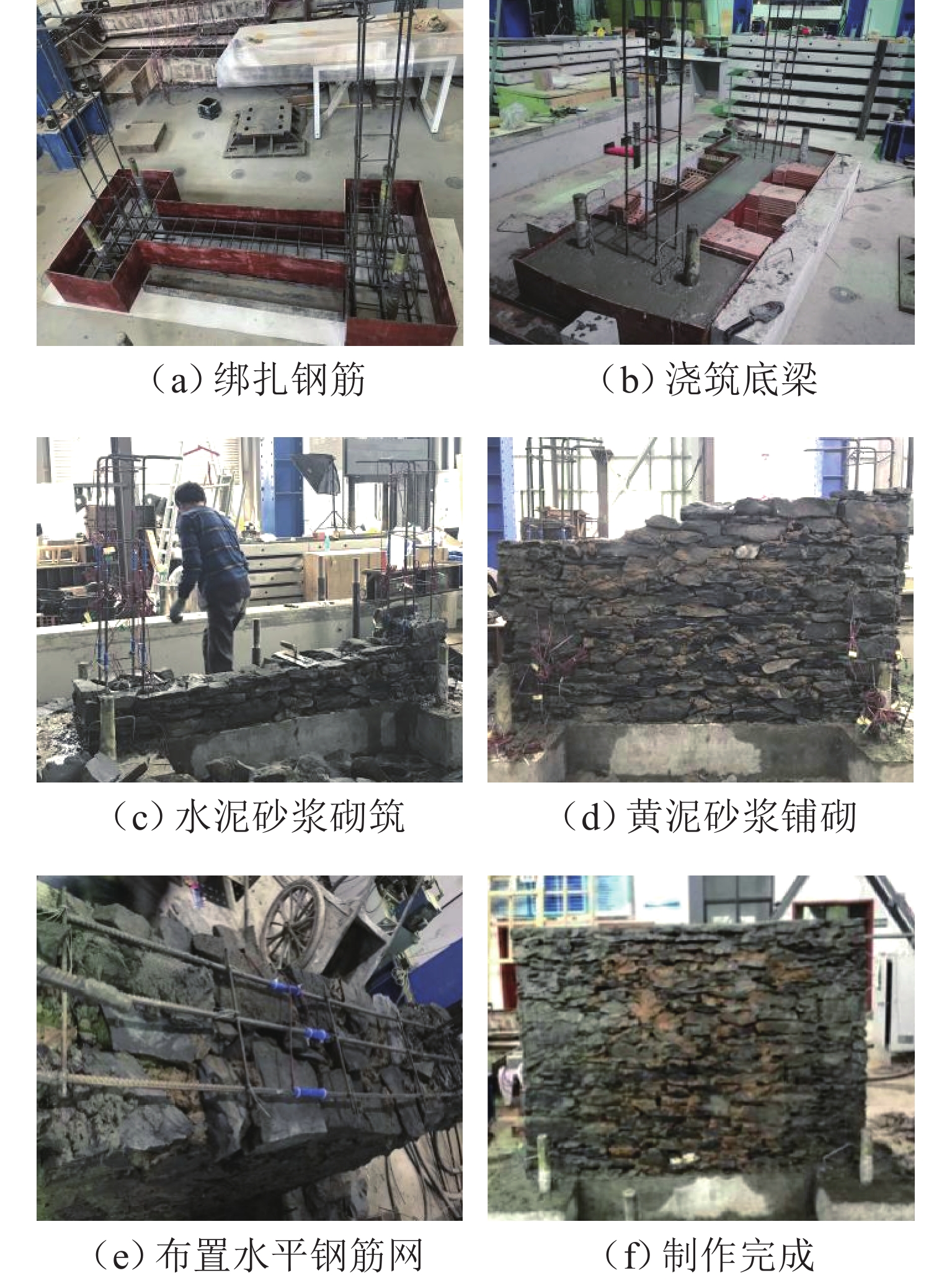
表 1 试件设计参数
Table 1. Design parameters of specimens
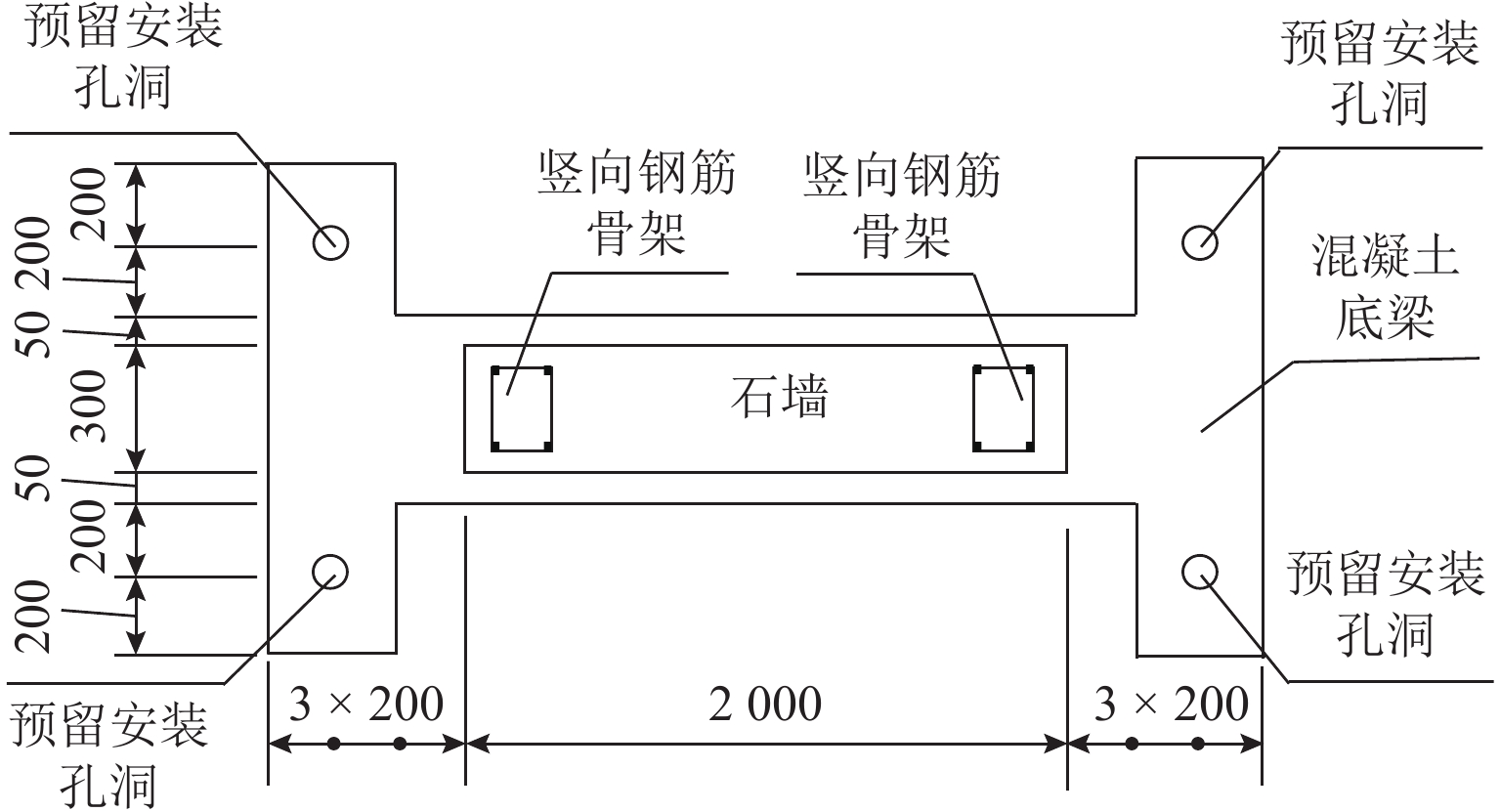
编号 长/高/厚/mm 抗震设计 W-1 2000 /1400 /300无 W-2 2000 /1400 /300钢筋骨架系统:包含水平钢筋网、竖向钢筋骨架和拉结筋  下载: 导出CSV
下载: 导出CSV
表 2 钢筋试验结果
Table 2. Reinforcement test results
d0/mm L0/mm Fel/kN Rel/MPa Fm/kN Rm/MPa 10 100 35.7 455 48.7 623 36.4 464 49.1 12 120 50.3 445 69.9 610 49.3 436 68.1
下载: 导出CSV
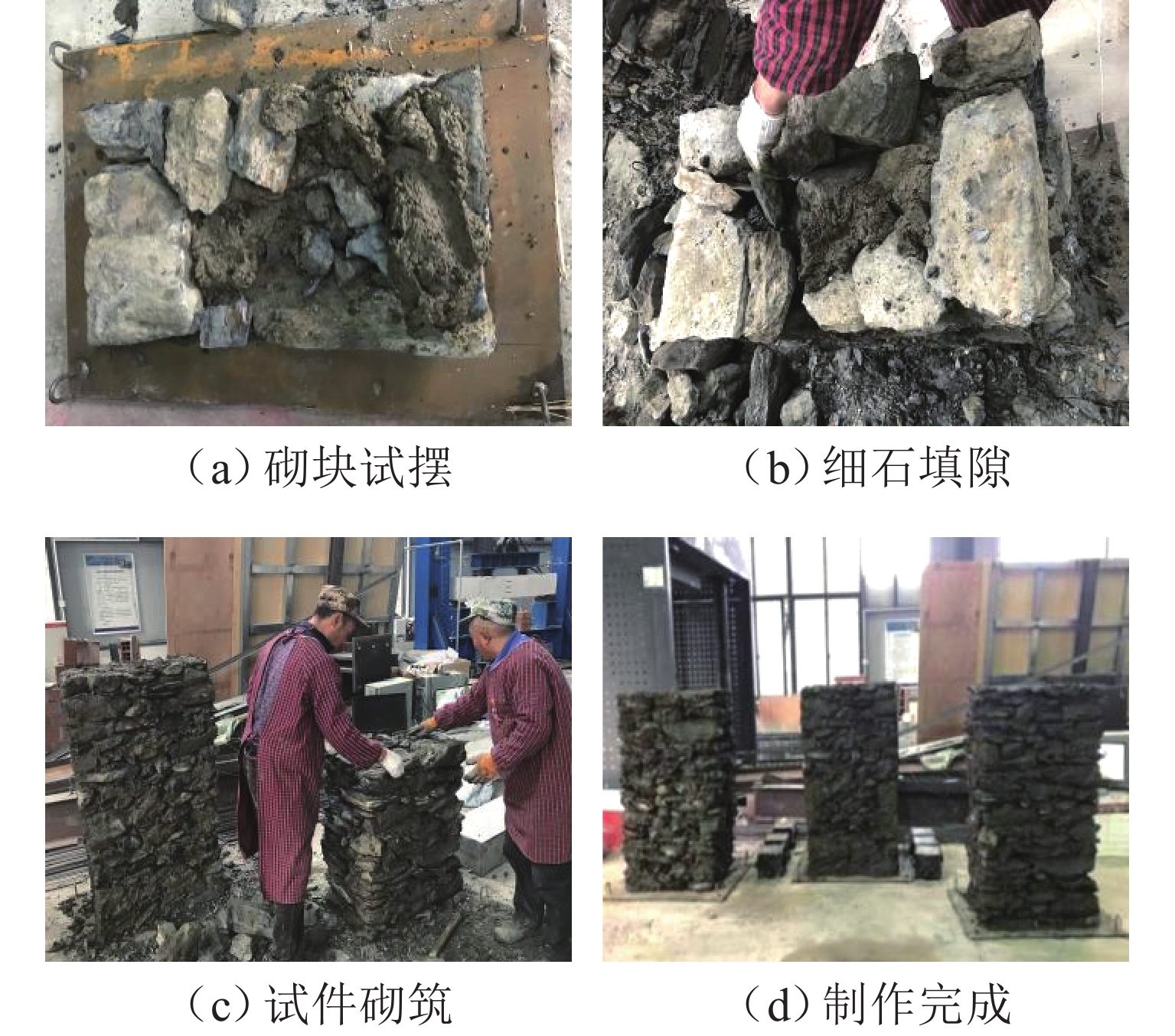
表 3 石砌体抗压强度
Table 3. Compressive strength of stone masonry
试件编号 F/kN Xm/mm A/(×105 mm2) f /(N·mm−2) 单个 平均值 SM-1 122.2 27.7 2.8 0.436 0.598 SM-2 205.0 45.8 2.8 0.732 SM-3 175.0 52.5 2.8 0.625
下载: 导出CSV
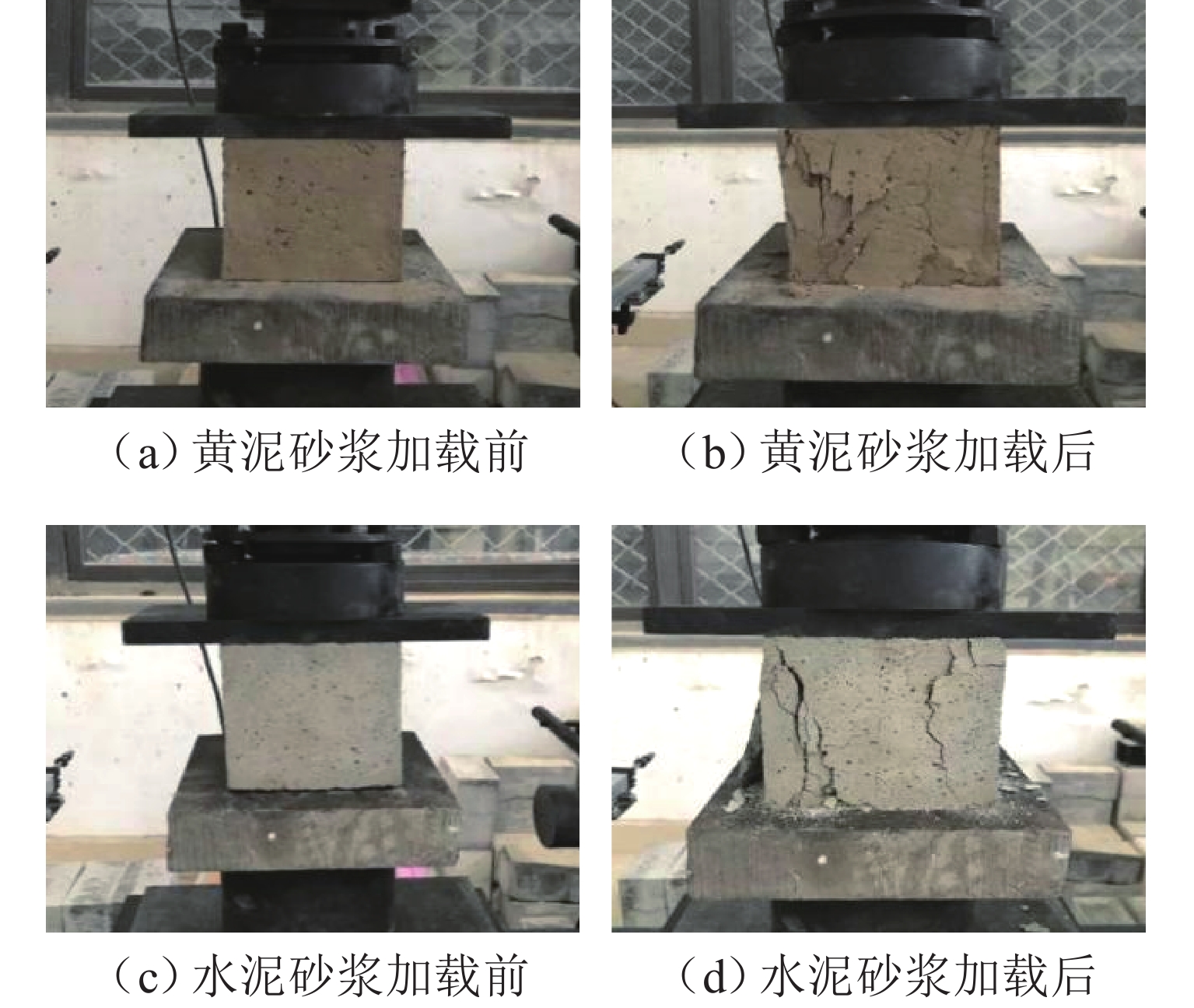
表 4 砂浆立方体抗压强度试验结果
Table 4. Test results for compressive strength of mortar cube
试件编号 A/mm2 Nu/N fm,cu/MPa f2/MPa HNSJ1 4998.32 8364.69 1.674 1.828 HNSJ2 4998.32 9075.95 1.816 HNSJ3 4998.32 9960.65 1.993 SNSJ1 4998.32 71869.84 14.379 14.386 SNSJ2 4998.32 71276.04 14.260 SNSJ3 4998.32 72569.61 14.519
下载: 导出CSV
表 5 钢筋材料性能
Table 5. Material property of reinforcement
d0/mm fy/MPa εy/10−3 fu/MPa Es/GPa 10 460 2.300 623 200 12 441 2.205 610 200
下载: 导出CSV
表 6 各阶段荷载及位移
Table 6. Load and displacement at each stage
试件编号 Pcr/kN Δcr/mm Py/kN Δy/mm Pm/kN Δm/mm Pu/kN Δu/mm μy θu W-1 10.07 1.75 13.48 2.80 19.49 20.00 18.19 28.00 10.00 1/55 W-2 23.85 2.80 38.70 5.60 63.33 20.00 62.56 46.70 8.34 1/33
下载: 导出CSV
表 7 不同阶段受力Eu试验结果
Table 7. Stress Eu test results at different stages
编号 开裂 极限 破坏 Eu ζeq Eu ζeq Eu ζeq W-1 0.034 0.119 0.538 0.200 0.843 0.242 W-2 0.109 0.086 0.890 0.114 2.383 0.200
下载: 导出CSV
-
[1] 潘毅,陈建,包韵雷,等. 长宁6.0级地震村镇建筑震害调查与分析[J]. 建筑结构学报,2020,41(增1): 297-306.PAN Yi, CHEN Jian, BAO Yunlei, et al. Seismic damage investigation and analysis of rural buildings in Ms 6.0 Changning earthquake[J]. Journal of Building Structures, 2020, 41(S1): 297-306. [2] 许浒,杜宁宁,余志祥,等. 川西藏羌石砌民居建筑的抗地震倒塌性能[J]. 西南交通大学学报,2019,54(5): 1021-1029,1046.XU Hu, DU Ningning, YU Zhixiang, et al. Seismic collapse-resistant performance of stone houses in Tibetan and Qiang Autonomous Prefectures of Western Sichuan[J]. Journal of Southwest Jiaotong University, 2019, 54(5): 1021-1029,1046. [3] 郭子雄,柴振岭,胡奕东,等. 条石砌筑石墙抗震性能试验研究[J]. 建筑结构学报,2011,32(3): 57-63.GUO Zixiong, CHAI Zhenling, HU Yidong, et al. Experimental study on seismic behavior of stone masonry wall[J]. Journal of Building Structures, 2011, 32(3): 57-63. [4] 王春萍,王璐,刘建锋,等. 单轴压缩条件下单裂隙花岗岩力学特性及破坏特征[J]. 西南交通大学学报,2024,59(2):369-376,446.WANG Chunping, WANG Lu, LIU Jianfeng, et al. Mechanical properties and failure characteristics of granite with single fracture under uniaxial compression[J]. Journal of Southwest Jiaotong University, 2024, 59(2):369-376,446. [5] 徐明,时丹,赵娜,等. 足尺细料石墙体抗震性能试验研究[J]. 建筑结构学报,2014,35(6): 145-152.XU Ming, SHI Dan, ZHAO Na, et al. Experimental research on seismic behavior of smooth block stone masonry walls[J]. Journal of Building Structures, 2014, 35(6): 145-152. [6] 徐明,赵娜,时丹,等. 粗料石墙体抗震性能试验研究[J]. 土木工程学报,2014,47(9): 29-37,83.XU Ming, ZHAO Na, SHI Dan, et al. Experimental study on seismic behavior of block stone masonry wall[J]. China Civil Engineering Journal, 2014, 47(9): 29-37,83. [7] 潘毅,陈齐,曹勇,等. 马尔康6.0级震群地震藏族民居震害调查与分析[J]. 土木工程学报,2024,57(3): 1-15.PAN Yi, CHEN Qi, CAO Yong. Seismic damage investigation and analysis of Tibetan dwellings in the Ms 6.0 Maerkang earthquake swarm[J]. China Civil Engineering Journal, 2024, 57(3): 1-15 [8] 潘毅,王忠凯,时胜杰,等. 尼泊尔8.1级地震加德满都——樟木沿线民居震害调查与分析[J]. 湖南大学学报(自然科学版),2017,44(3): 35-44.PAN Yi, WANG Zhongkai, SHI Shengjie, et al. Investigation and analysis on seismic damage of residential buildings along the highway from kathmandu to Zhangmu in Ms 8.1 gorkha earthquake[J]. Journal of Hunan University (Natural Sciences), 2017, 44(3): 35-44. [9] MILOSEVIC J, GAGO A S, LOPES M, et al. Experimental assessment of shear strength parameters on rubble stone masonry specimens[J]. Construction and Building Materials, 2013, 47: 1372-1380. doi: 10.1016/j.conbuildmat.2013.06.036 [10] ABDULLA K F, CUNNINGHAM L S, GILLIE M. Simulating masonry wall behaviour using a simplified micro-model approach[J]. Engineering Structures, 2017, 151: 349-365. doi: 10.1016/j.engstruct.2017.08.021 [11] 黄辉,杨丹,陈科,等. BFRP网格改良藏式毛石墙体受力性能试验研究[J]. 西南交通大学学报,2020,55(3): 643-649. doi: 10.3969/j.issn.0258-2724.20180455HUANG Hui, YANG Dan, CHEN Ke, et al. Experiments on mechanical performance of Tibetan rubble stone walls retrofitted with BFRP grids[J]. Journal of Southwest Jiaotong University, 2020, 55(3): 643-649. doi: 10.3969/j.issn.0258-2724.20180455 [12] 冯一博. 九寨沟景区藏族民居震害及抗震优化策略研究[D]. 成都:西南交通大学,2021 [13] 徐天航,郭子雄,柴振岭,等. 钢筋网片改性砂浆加固石砌体墙抗震性能试验研究[J]. 建筑结构学报,2016,37(12): 120-125.XU Tianhang, GUO Zixiong, CHAI Zhenling, et al. Experimental study on seismic behavior of stone masonry walls strengthened with steel-meshed modified cement mortar[J]. Journal of Building Structures, 2016, 37(12): 120-125. [14] MAIO R, ESTÊVÃO J M C, FERREIRA T M, et al. The seismic performance of stone masonry buildings in Faial Island and the relevance of implementing effective seismic strengthening policies[J]. Engineering Structures, 2017, 141: 41-58. doi: 10.1016/j.engstruct.2017.03.009 [15] 江道镨. 福建省镇(乡)村石砌体结构房屋抗震性能分析及加固处理研究[J]. 工程抗震与加固改造,2020,42(3): 157-163,14.JIANG Daopu. Analysis of seismic performance and study on reinforcement treatment of stone masonry buildings in downs and villages of Fujian Province[J]. Earthquake Resistant Engineering and Retrofitting, 2020, 42(3): 157-163,14. [16] 江道镨,林德宏. 某石墙房屋结构抗震性能鉴定及加固处理[J]. 工程抗震与加固改造,2017,39(增1): 110-113.JIANG Daopu, LIN Dehong. Seismic appraiser and reinforcement treatment of a stonewall building[J]. Earthquake Resistant Engineering and Retrofitting, 2017, 39(S1): 110-113. [17] 张春涛,邓传力,刘宜丰. 方钢管砂卵石组合圈梁构造柱约束墙体抗震性能试验研究[J]. 建筑结构学报,2021,42(3): 24-33.ZHANG Chuntao, DENG Chuanli, LIU Yifeng. Experimental study on seismic resistance of brick wall constrained by tie column-beam system with sand-cobble-filled square steel tube[J]. Journal of Building Structures, 2021, 42(3): 24-33. [18] 徐明,时丹,赵娜,等. 缩尺方法对料石墙体抗震性能的影响[J]. 东南大学学报(自然科学版),2013,43(6): 1288-1292.XU Ming, SHI Dan, ZHAO Na, et al. Effects of scale method on seismic behavior of stone masonry walls[J]. Journal of Southeast University (Natural Science Edition), 2013, 43(6): 1288-1292. [19] 莫忧. 四川省藏羌石木结构房屋建造图册(试行)[M]. 成都:西南交通大学出版社,2021:42-48. [20] 四川省建筑科学研究院. 砌体基本力学性能试验方法标准:GB/T 50129—2011[S]. 北京:中国建筑工业出版社,2011. [21] 陕西省建筑科学研究院. 砌体结构工程施工质量验收规范:GB 50203—2011[S]. 北京:中国建筑工业出版社,2011. [22] 陕西省建筑科学研究院. 建筑砂浆基本性能试验方法标准:JGJ/T 70—2009[S]. 北京:中国建筑工业出版社,2009 [23] 孙建刚,郭迅,崔利富. 少数民族地区建筑震害典型研究[M]. 北京:民族出版社,2016:269. [24] 杨卫忠. 砌体受压本构关系模型[J]. 建筑结构,2008,38(10): 80-82.YANG Weizhong. Constitutive relationship model for masonry materials in compressio[J]. Building Structure, 2008, 38(10): 80-82. [25] 郑妮娜,李英民,潘毅. 芯柱式构造柱约束的低层砌体结构抗震性能[J]. 西南交通大学学报,2011,46(1): 24-29,55.ZHENG Nina, LI Yingmin, PAN Yi. Seismic behavior of low masonry structure with core-tie-columns[J]. Journal of Southwest Jiaotong University, 2011, 46(1): 24-29,55. -

 下载:
下载:



 点击查看大图
点击查看大图
计量
- 文章访问数: 272
- HTML全文浏览量: 190
- PDF下载量: 23
- 被引次数: 0