

Voiceprint Recognition of Discharge Aliasing Signals from 750 kV Transformer and Pin-Plate Based on Sparse Representation Theory and Convolutional Neural Network
-
摘要:
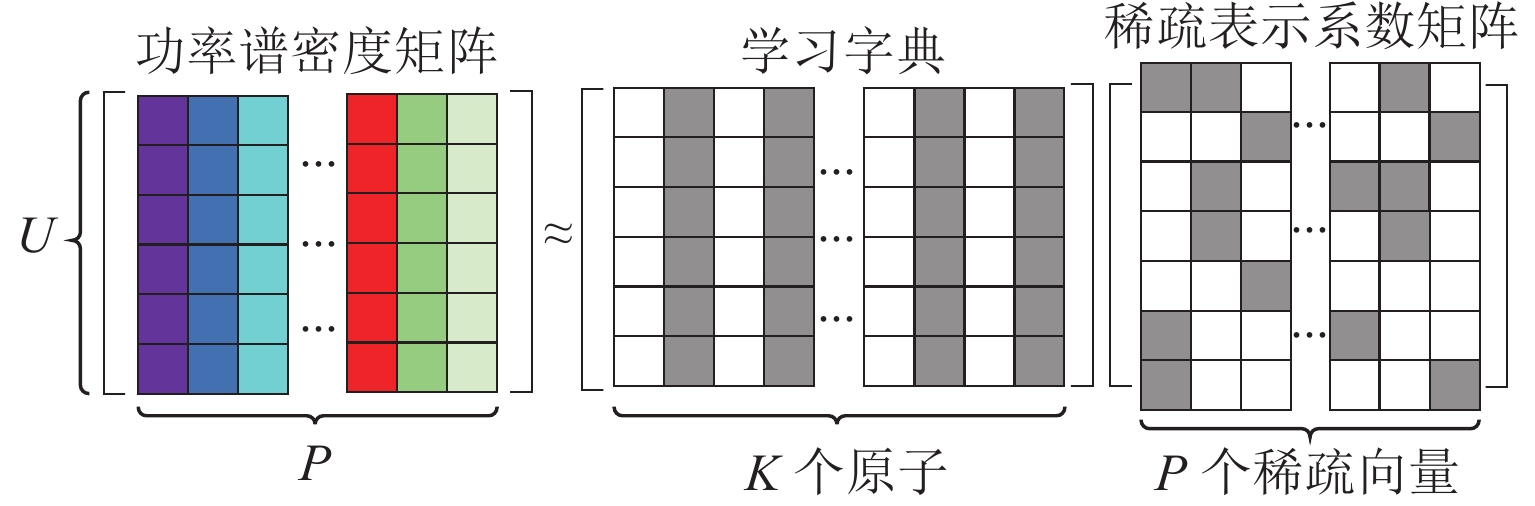
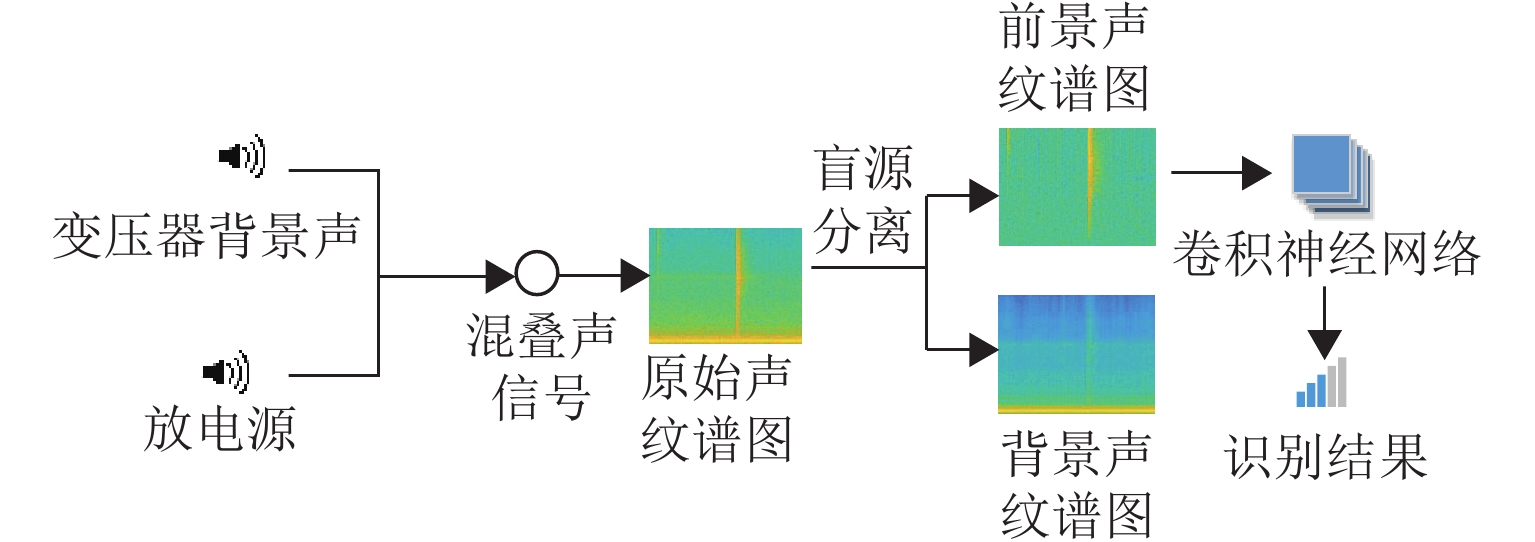
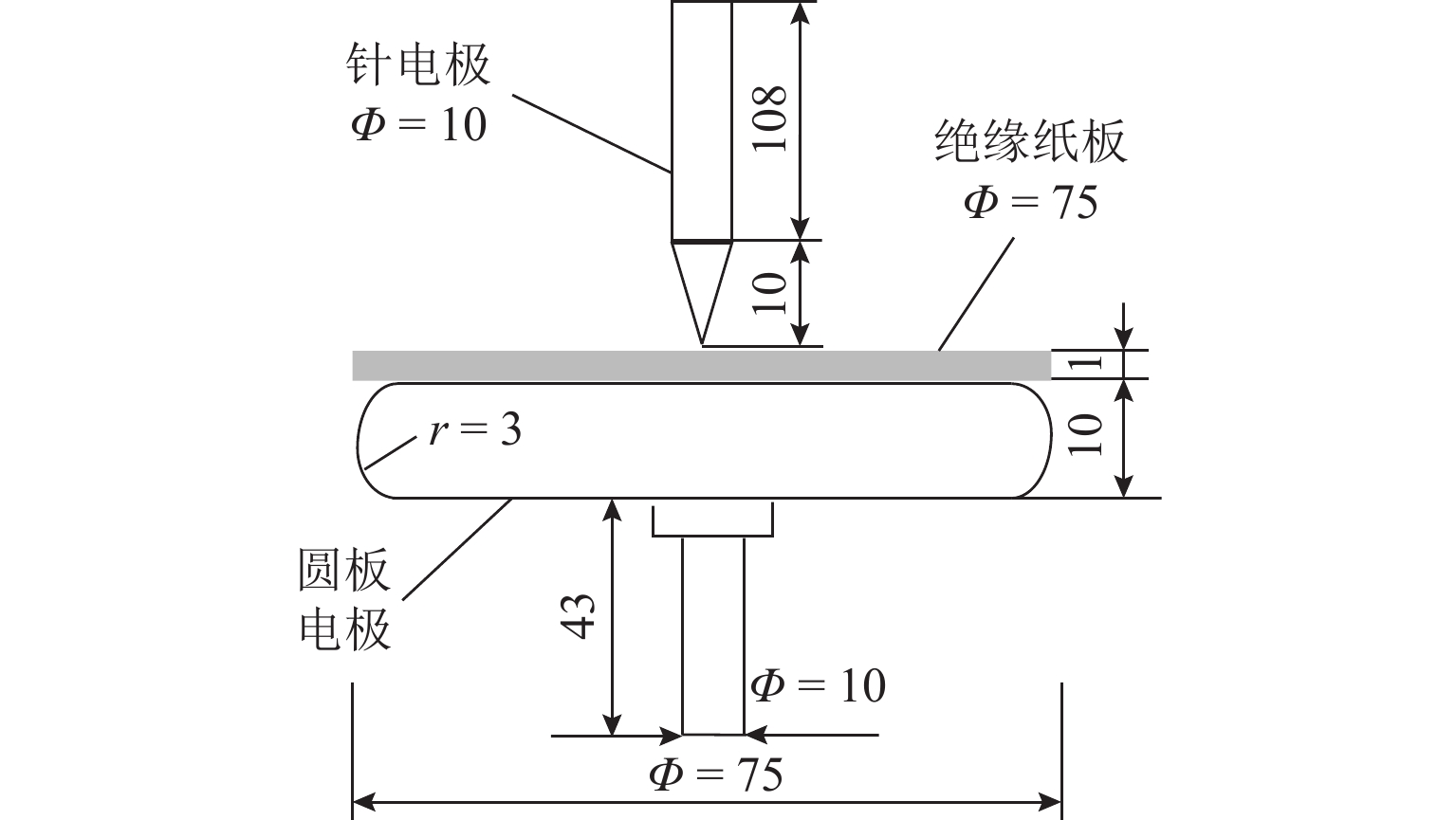
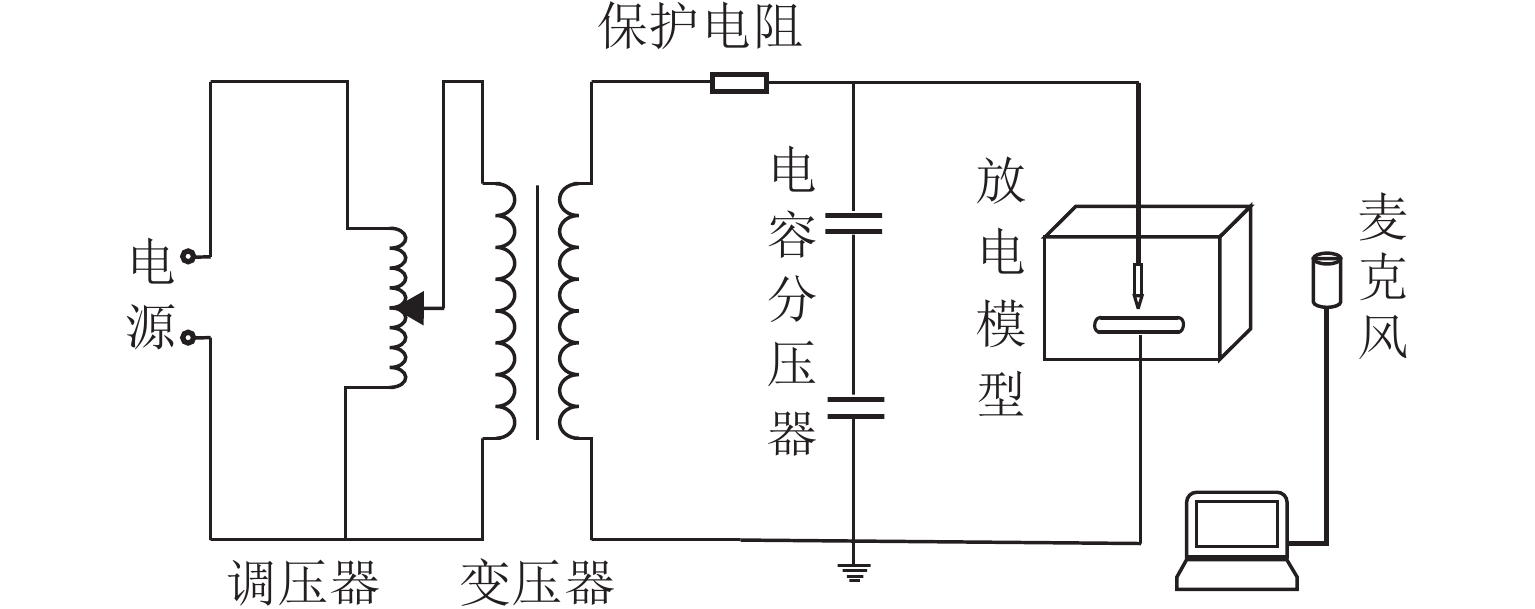
变压器绝缘水平和健康状态对电网的安全稳定至关重要,为研究750 kV变压器内部存在放电故障时,箱体外采集的可听声信号中可能混杂有电晕声、鸟鸣等其他干扰信号的工程实际问题,提出一种基于稀疏表示理论(SBSS)与卷积神经网络(CNN)的750 kV变压器与尖板放电混叠信号的声纹识别方法. 首先,采集武胜750 kV变电站变压器正常运行声信号作为背景声,构建针-板放电模型得到放电声信号和现场常见干扰声作为前景声,通过添加不同信噪比的前景声到背景声中构造混叠声信号;然后,利用基于稀疏表示理论的盲分离算法实现目标前景声纹图谱和冗余背景声纹图谱的分离;最后,对CNN模型超参数进行优化,以提高模型对分离后的各类前景声纹谱图的分类性能. 研究结果表明:通过盲源分离算法可以剔除冗余背景声干扰,使神经网络聚焦于前景声的分类识别;本文方法可实现混叠声信号中前景声纹的分离,分离后,CNN、支持向量机(SVM)和反向传播神经网络(BPNN)的识别准确率分别提高7.6%、17.2%和14.3%.
Abstract:Transformer insulation level and health state are crucial to the safety and stability of the power grid. In order to study the practical engineering problem that the audible acoustic signals collected outside the box may be mixed with other interference signals, such as corona sound and bird song when there is a discharge fault inside the 750 kV transformer, a voiceprint recognition of 750 kV transformer and pin-plate discharge aliasing signals based on sparse representation theory (SBSS) and convolutional neural network (CNN) was proposed. Firstly, the normal operation sound signal of Wusheng 750 kV Substation was collected as the background sound, and the discharge sound signal and the common interference sound in the field were used as the foreground sound by constructing the pin-plate discharge model. The aliasing sound signal was constructed by adding the foreground sound with different signal-to-noise ratios to the background sound. Secondly, the blind separation algorithm based on SBSS was used to realize the separation of target foreground and redundant background voiceprint spectra. Finally, the hyperparameters of the CNN model were optimized to improve the classification performance of the model on the separated various types of foreground voiceprint spectra. The results show that the blind source separation algorithm can eliminate the redundant background sound interference so that the neural network can focus on the classification and recognition of foreground sound. The proposed method can separate foreground voiceprint in the aliasing sound signals, and the recognition accuracies of the CNN, the support vector machine (SVM), and the back-propagation neural network (BPNN) after separation are improved by 7.6%, 17.2%, and 14.3%, respectively.
-
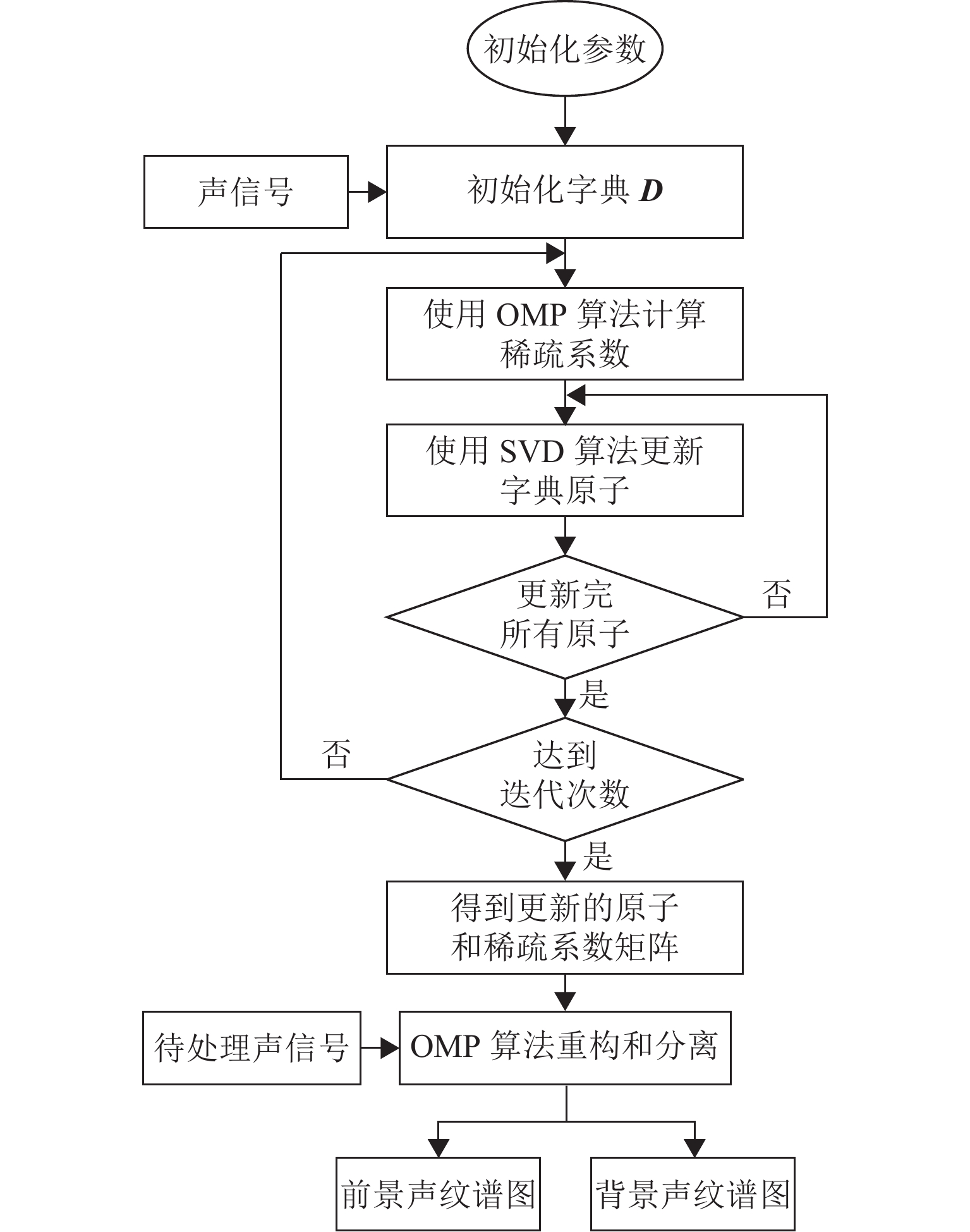
图 3 变压器声纹谱图稀疏盲分离方法流程
Figure 3. Process of sparse blind separation method for transformer voiceprint spectra
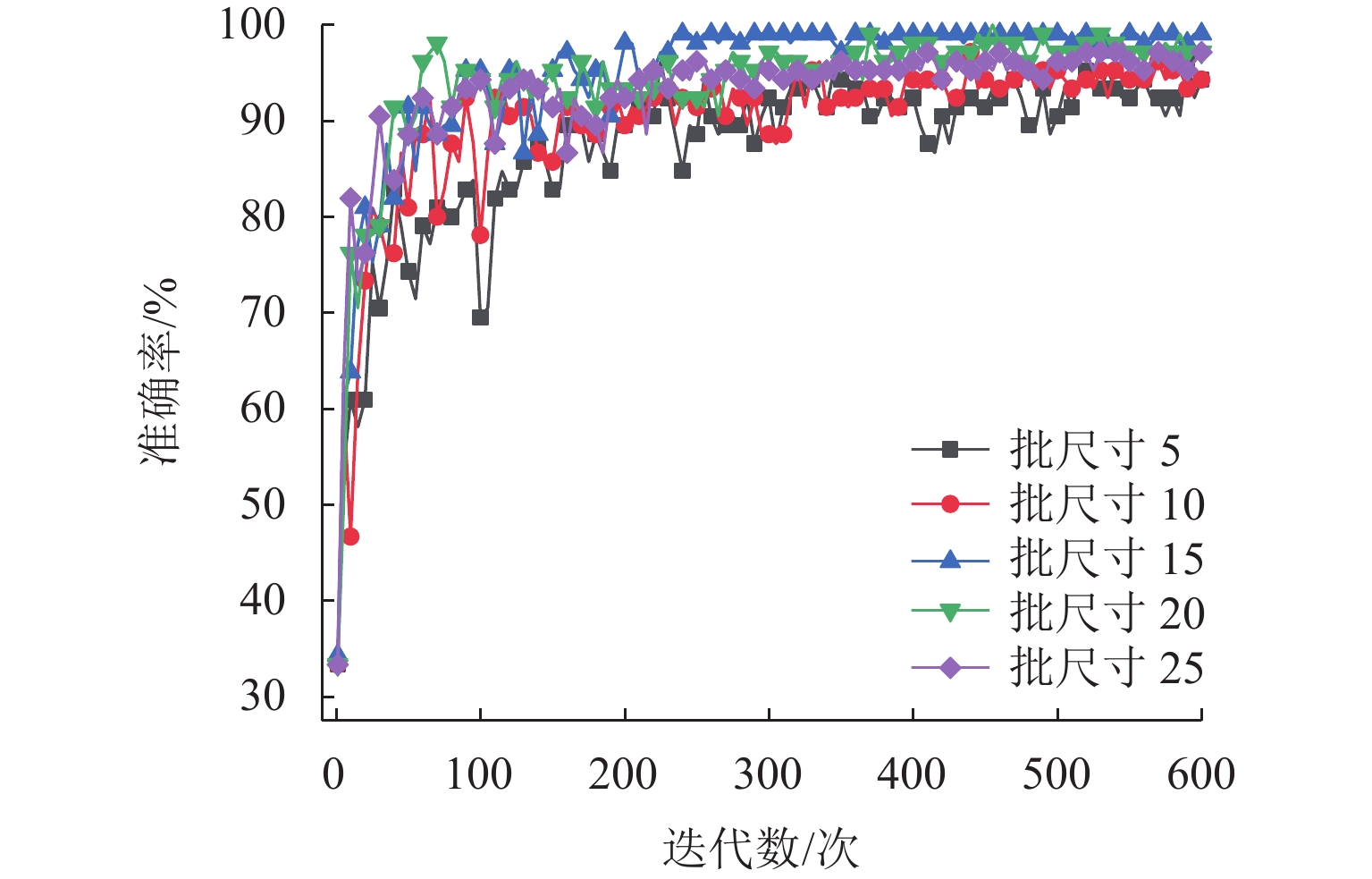
图 9 不同批尺寸识别准确率对比
Figure 9. Comparison of recognition accuracies of different batch sizes
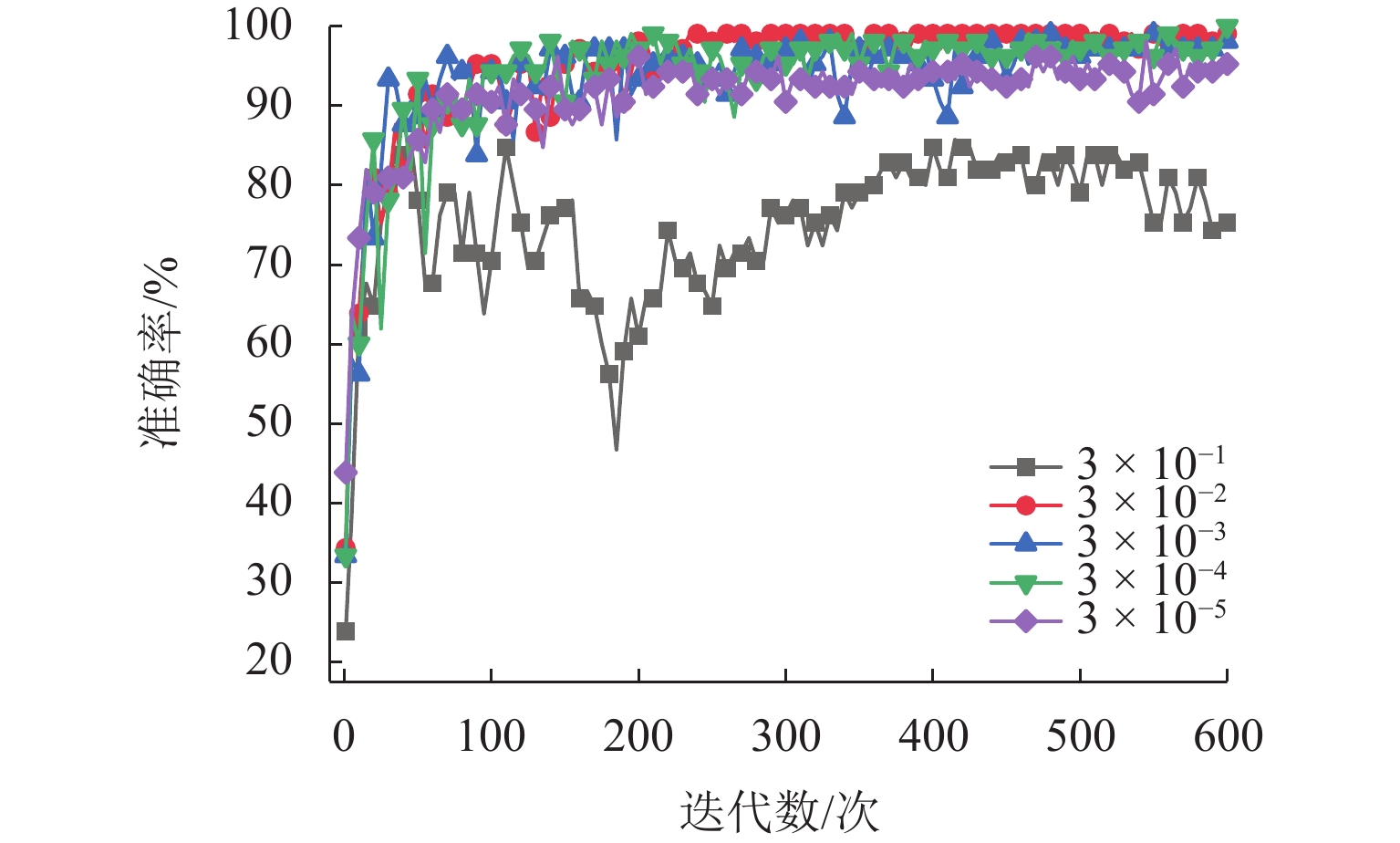
图 10 不同学习率识别准确率对比
Figure 10. Comparison of recognition accuracies of different learning rates
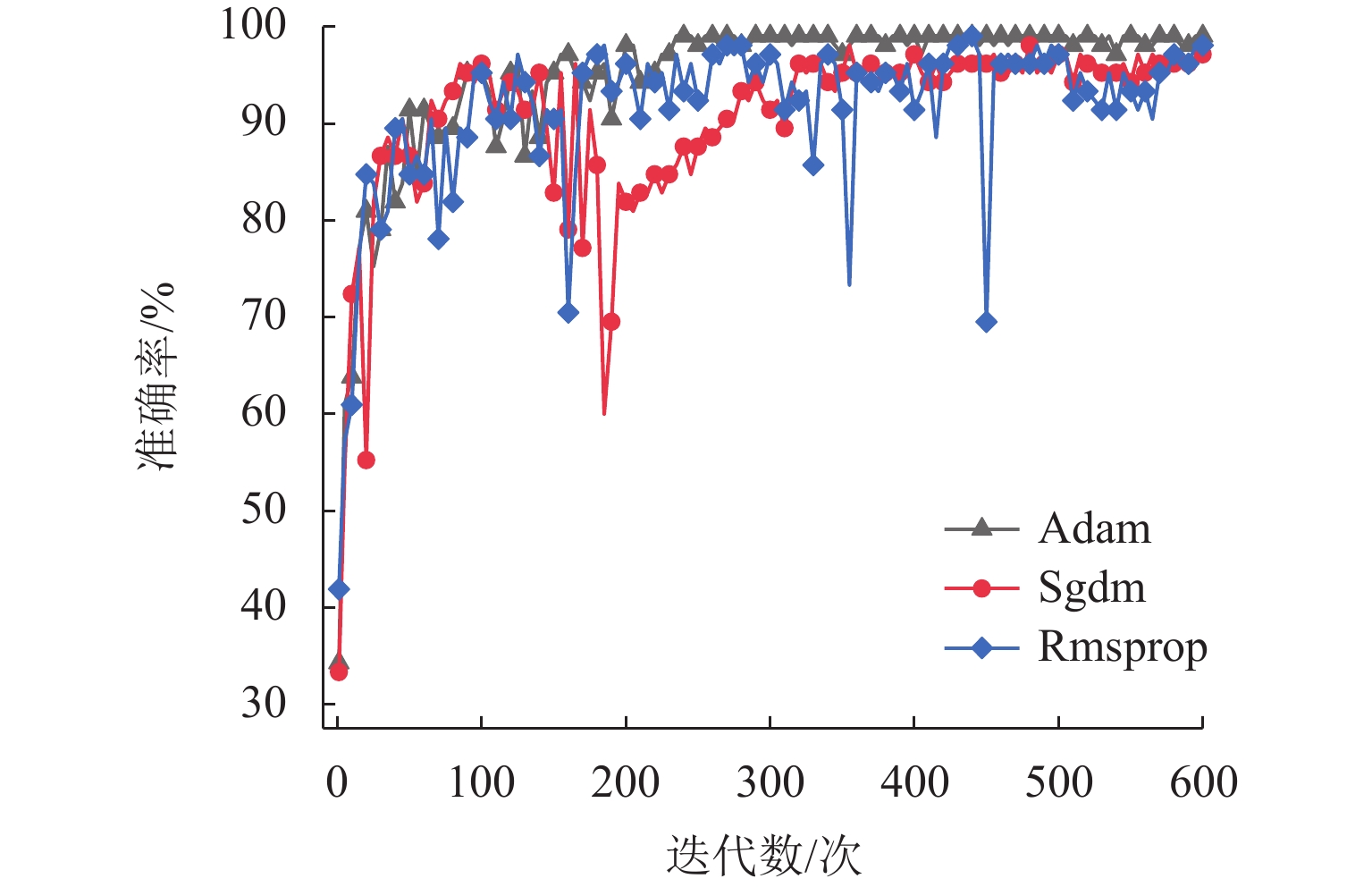
图 11 不同优化器识别准确率对比
Figure 11. Comparison of recognition accuracies of different optimizers
表 1 声纹样本
Table 1. Voiceprint samples
前景声 背景声 混叠信号 样本数/个 时长/s 放电声 武胜变 放电声 + 武胜变 135 2 说话声 武胜变 说话声 + 武胜变 135 2 鸟鸣声 武胜变 鸟鸣声 + 武胜变 135 2  下载: 导出CSV
下载: 导出CSV
表 2 分离背景与参考谱图声纹相似度对比
Table 2. Voiceprint similarity comparison of separated background and reference spectra
谱图类型 放电声 说话声 鸟鸣声 J 0.87 0.89 0.87
下载: 导出CSV
表 3 CNN网络结构参数
Table 3. Parameters of CNN structure
结构层 通道数/个 核尺寸 激活函数/池化类型 输入层 1 卷积层 16 5 × 5 ReLU 池化层 16 3 × 3 Max Pooling 卷积层 32 5 × 5 ReLU 池化层 32 3 × 3 Max Pooling 卷积层 64 5 × 5 ReLU 池化层 64 3 × 3 Max Pooling 卷积层 128 5 × 5 ReLU 全连接层 1024 Softmax 输出层 3
下载: 导出CSV
表 4 不同方法的声纹识别准确率对比
Table 4. Comparison of voiceprint recognition effects of different methods
% 谱图类型 CNN SVM BP 混叠声纹谱 91.43 65.71 43.81 前景声纹谱 99.05 82.86 58.10
下载: 导出CSV
-
[1] 吴广宁,周芃,高波,等. 不同水分含量油浸纸板沿面放电发展过程及特性[J]. 西南交通大学学报,2020,55(3): 552-560.WU Guangning, ZHOU Peng, GAO Bo, et al. Discharge development and characteristics of oil-immersed pressboard surface with different moisture contents[J]. Journal of Southwest Jiaotong University, 2020, 55(3): 552-560. [2] 贾亚飞,朱永利,王刘旺,等. 基于VMD和多尺度熵的变压器内绝缘局部放电信号特征提取及分类[J]. 电工技术学报,2016,31(19): 208-217.JIA Yafei, ZHU Yongli, WANG Liuwang, et al. Feature extraction and classification on partial discharge signals of power transformers based on VMD and multiscale entropy[J]. Transactions of China Electrotechnical Society, 2016, 31(19): 208-217. [3] 律方成,牛雷雷,王胜辉,等. 基于紫外成像和改进YOLOv3的瓷悬式绝缘子放电严重程度评估[J]. 高电压技术,2021,47(2): 377-386.LÜ Fangcheng, NIU Leilei, WANG Shenghui, et al. Discharge severity assessment of porcelain suspension insulators based on UV images and improved YOLOv3[J]. High Voltage Engineering, 2021, 47(2): 377-386. [4] 郭蕾,曹伟东,白龙雷,等. 乙丙橡胶电缆终端气隙局部放电过程及特征提取[J]. 西南交通大学学报,2021,56(5): 1011-1019,1028.GUO Lei, CAO Weidong, BAI Longlei, et al. Partial discharge process and feature extraction of air gap in EPR cable terminal[J]. Journal of Southwest Jiaotong University, 2021, 56(5): 1011-1019,1028. [5] 高佳程,朱永利,贾亚飞,等. 基于改进SVDD算法与马氏距离的未知局部放电类型的识别[J]. 电工技术学报,2018,33(15): 3510-3517.GAO Jiacheng, ZHU Yongli, JIA Yafei, et al. Pattern recognition of unknown types of partial discharge based on improved SVDD algorithm and mahalanobis distance[J]. Transactions of China Electrotechnical Society, 2018, 33(15): 3510-3517. [6] 从建力,王源,徐舟,等. 振噪融合的地铁钢轨波磨快速测量方法[J]. 西南交通大学学报,2023,58(3): 677-684.CONG Jianli, WANG Yuan, XU Zhou, et al. Rail corrugation measurement method based on vibration-noise fusion in metro system[J]. Journal of Southwest Jiaotong University, 2023, 58(3): 677-684. [7] 卜秀孟,王力东,黎清蓉,等. 高速磁浮车-桥耦合振动控制参数影响分析[J]. 西南交通大学学报,2024,59(4): 848-857,866.BU Xiumeng, WANG Lidong, LI Qingrong, et al. Influence analysis of vibration control parameters for high-speed maglev train-bridge coupling[J]. Journal of Southwest Jiaotong University, 2024, 59(4):848-857,866. [8] 刘伟,赵春发,娄会彬,等. 基于虚拟激励法的磁浮车桥耦合系统随机振动分析[J]. 西南交通大学学报,2024,59(4): 823-831.LIU Wei, ZHAO Chunfa, LOU Huibin, et al. Stochastic vibration analysis of maglev train-bridge coupling system based on pseudo excitation method[J]. Journal of Southwest Jiaotong University, 2024, 59(4):823-831. [9] 张重远,罗世豪,岳浩天,等. 基于Mel时频谱-卷积神经网络的变压器铁芯声纹模式识别方法[J]. 高电压技术,2020,46(2): 413-423.ZHANG Zhongyuan, LUO Shihao, YUE Haotian, et al. Pattern recognition of acoustic signals of transformer core based on Mel-spectrum and CNN[J]. High Voltage Engineering, 2020, 46(2): 413-423. [10] 张瑞琪. 基于声学信号的变压器放电故障诊断方法研究[D]. 武汉:华中科技大学,2018. [11] 游颖敏,王景芹,舒 亮,等. 基于音频特征的交流接触器电寿命预测方法[J]. 电工技术学报,2021,36(9): 1986-1998.YOU Yingmin, WANG Jingqi SHU Liang, et al. The method of electrical life prediction considering the audio characteristics of AC contactor[J]. Transactions of China Electrotechnical Society, 2021, 36(9): 1986-1998. [12] 金潇. 基于声信号的配电变压器故障诊断方法研究[D]. 武汉:武汉大学,2017. [13] 武立平,吴强,丰遥,等. 基于振动信号SVM分类的变压器状态识别[J]. 高压电器,2019,55(11): 232-238.WU Liping, WU Qiang, FENG Yao, et al. State recognition of transformer based on SVM classification of vibration signals[J]. High Voltage Apparatus, 2019, 55(11): 232-238. [14] 符凯. 基于HHT的非平稳信号特征提取方法及应用研究[D]. 重庆:重庆大学,2015. [15] 孙玉伟,罗林根,陈敬德,等. 含噪背景下基于盲源分离与NSVDD的断路器机械故障诊断方法[J]. 高电压技术,2022,48(3): 1104-1113.SUN Yuwei, LUO Lingen, CHEN Jingde, et al. Mechanical fault diagnosis method of circuit breaker based on blind source separation and NSVDD under noisy background[J]. High Voltage Engineering, 2022, 48(3): 1104-1113. [16] 周东旭,王丰华,党晓婧,等. 基于稀疏表示理论的特高压交流变压器声信号盲分离研究[J]. 电网技术,2020,44(8): 3139-3148.ZHOU Dongxu, WANG Fenghua, DANG Xiaojing, et al. Blind separation of UHV power transformer acoustic signal preprocessing based on sparse representation theory[J]. Power System Technology, 2020, 44(8): 3139-3148. [17] 孙玉伟,罗林根,陈敬德,等. 基于声音特征与改进稀疏表示分类的断路器机械故障诊断方法[J]. 电网技术,2022,44(3): 1214-1222.SUN Yuwei, LUO Lingen, CHEN Jingde, et al. Mechanical fault diagnosis method of circuit breaker based on sound characteristics and improved sparse representation classification[J]. Power System Technology, 2022, 44(3): 1214-1222. [18] 周东旭,王丰华,党晓婧,等. 基于压缩观测与判别字典学习的干式变压器声纹识别[J]. 中国电机工程学报,2020,40(19): 6380-6390.ZHOU Dongxu, WANG Fenghua, DANG Xiaojing, et al. Dry type transformer voiceprint recognition based on compressed observation and discrimination dictionary learning[J]. Proceedings of the CSEE, 2020, 40(19): 6380-6390. [19] 刘云鹏,王博闻,岳浩天,等. 基于50 Hz倍频倒谱系数与门控循环单元的变压器偏磁声纹识别[J]. 中国电机工程学报,2020,40(14): 4681-4694,4746.LIU Yunpeng, WANG Bowen, YUE Haotian, et al. Identification of transformer bias voiceprint based on 50 Hz frequency multiplication cepstrum coefficients and gated recurrent unit[J]. Proceedings of the CSEE, 2020, 40(14): 4681-4694,4746. [20] CAO J W, CAO M, WANG J Z, et al. Urban noise recognition with convolutional neural network[J]. Multimedia Tools and Applications, 2019, 78(20): 29021-29041. doi: 10.1007/s11042-018-6295-8 [21] ALAMIR M A. A novel acoustic scene classification model using the late fusion of convolutional neural networks and different ensemble classifiers[J]. Applied Acoustics, 2021, 175: 107829.1-107829.8. [22] 陈晓雷,孙永峰,李 策,等. 基于卷积神经网络和双向长短期记忆的稳定抗噪声滚动轴承故障诊断[J]. 吉林大学学报(工学版),2022,52(2): 296-309.CHEN Xiaolei, SUN Yongfeng, LI Ce, et al. Stable anti-noise fault diagnosis of rolling bearing based on CNN-BiLSTM[J]. Journal of Jilin University (Engineering and Technology Edition), 2022, 52(2): 296-309. [23] 朱煜峰,许永鹏,陈孝信,等. 基于卷积神经网络的直流XLPE电缆局部放电模式识别技术[J]. 电工技术学报,2020,35(3): 659-668.ZHU Yufeng, XU Yongpeng, CHEN Xiaoxin, et al. Pattern recognition of partial discharges in DC XLPE cables based on convolutional neural network[J]. Transactions of China Electrotechnical Society, 2020, 35(3): 659-668. [24] 万晓琪,宋辉,罗林根,等. 卷积神经网络在局部放电图像模式识别中的应用[J]. 电网技术,2019,43(6): 2219-2226.WAN Xiaoqi, SONG Hui, LUO Lingen, et al. Application of convolutional neural networks in pattern recognition of partial discharge image[J]. Power System Technology, 2019, 43(6): 2219-2226. [25] 全国电声学标准化技术委员会. 电声学 声级计 第1部分:规范:GB/T 3785.1—2023[S]. 北京:中国标准出版社,2023.全国电声学标准化技术委员会. 电声学 声级计 第1部分: 规范: GB/T 3785.1—2023[S]. 北京: 中国标准出版社, 2023. [26] 中国电器工业协会. 电力变压器 第10部分:声级测定:GB/T 1094.10—2022[S]. 北京:中国标准出版社,2022. [27] 范文杰,张志斌,夏昌杰,等. 多手段测量下的油纸绝缘针板电极局部放电的演化规律分析[J]. 高电压技术,2022,48(3): 914-927.FAN Wenjie, ZHANG Zhibin, XIA Changjie, et al. Evolution law of partial discharge of oil-paper insulated needle-plate electrode based on multi-method measurement[J]. High Voltage Engineering, 2022, 48(3): 914-927. [28] 程养春,张振亮. 基于随机森林的变压器多源局部放电诊断[J]. 中国电机工程学报,2018,38(17): 5246-5256,5322.CHENG Yangchun, ZHANG Zhenliang. Multi-source partial discharge diagnosis of transformer based on random forest[J]. Proceedings of the CSEE, 2018, 38(17): 5246-5256,5322. [29] 潘宁. 复杂电磁环境下时频混叠信号的识别与分离[D]. 郑州:郑州大学,2021. [30] 纪德洋,金锋,冬雷,等. 基于皮尔逊相关系数的光伏电站数据修复[J]. 中国电机工程学报,2022,42(4): 1514-1523.JI Deyang, JIN Feng, DONG Lei, et al. Data repairing of photovoltaic power plant based on Pearson correlation coefficient[J]. Proceedings of the CSEE, 2022, 42(4): 1514-1523. -

 下载:
下载:


 点击查看大图
点击查看大图

计量
- 文章访问数: 576
- HTML全文浏览量: 130
- PDF下载量: 20
- 被引次数: 0