摘要:
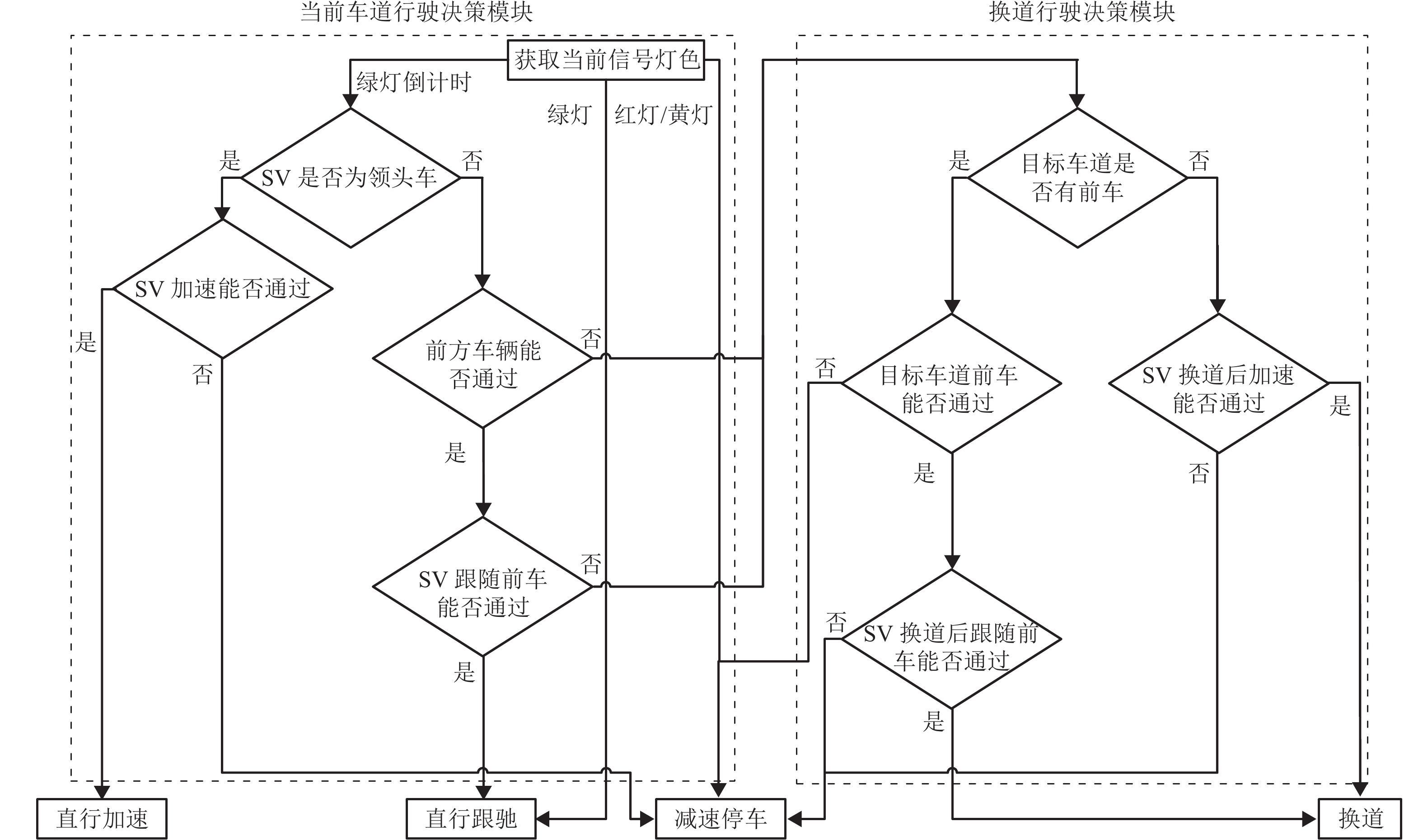
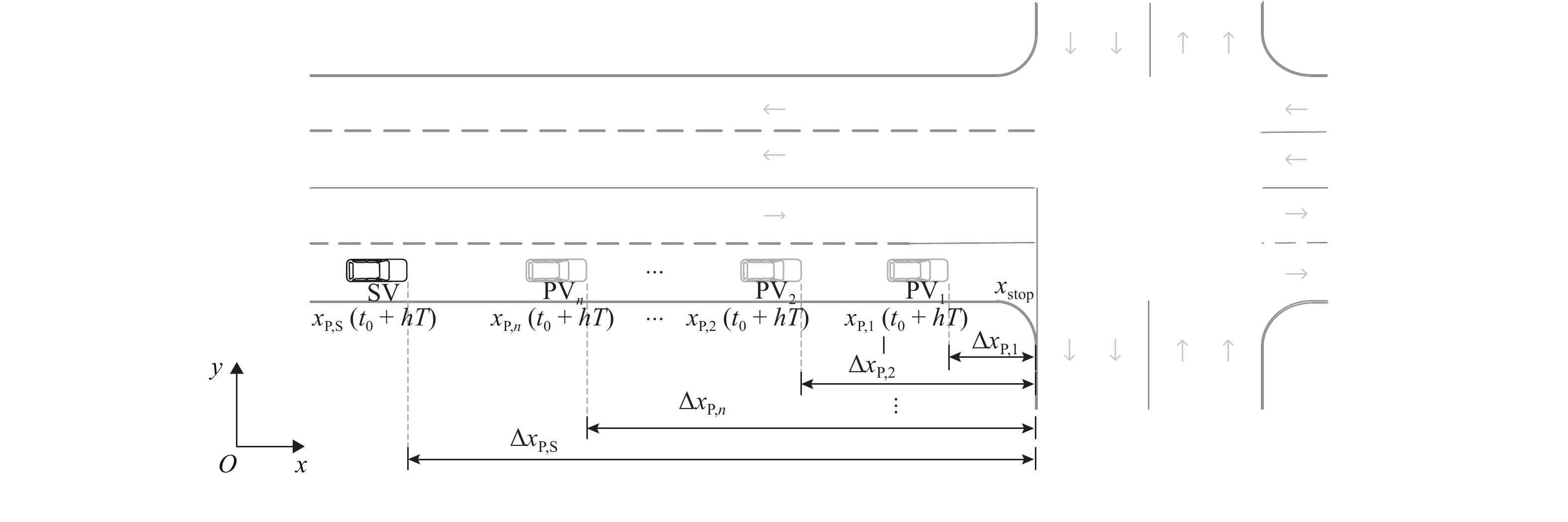
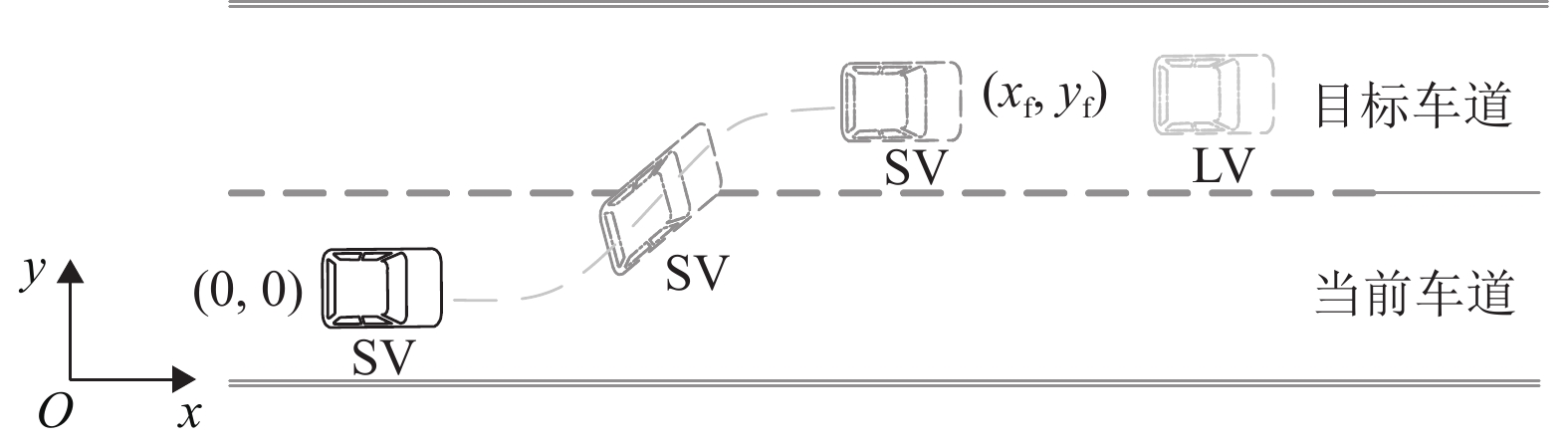
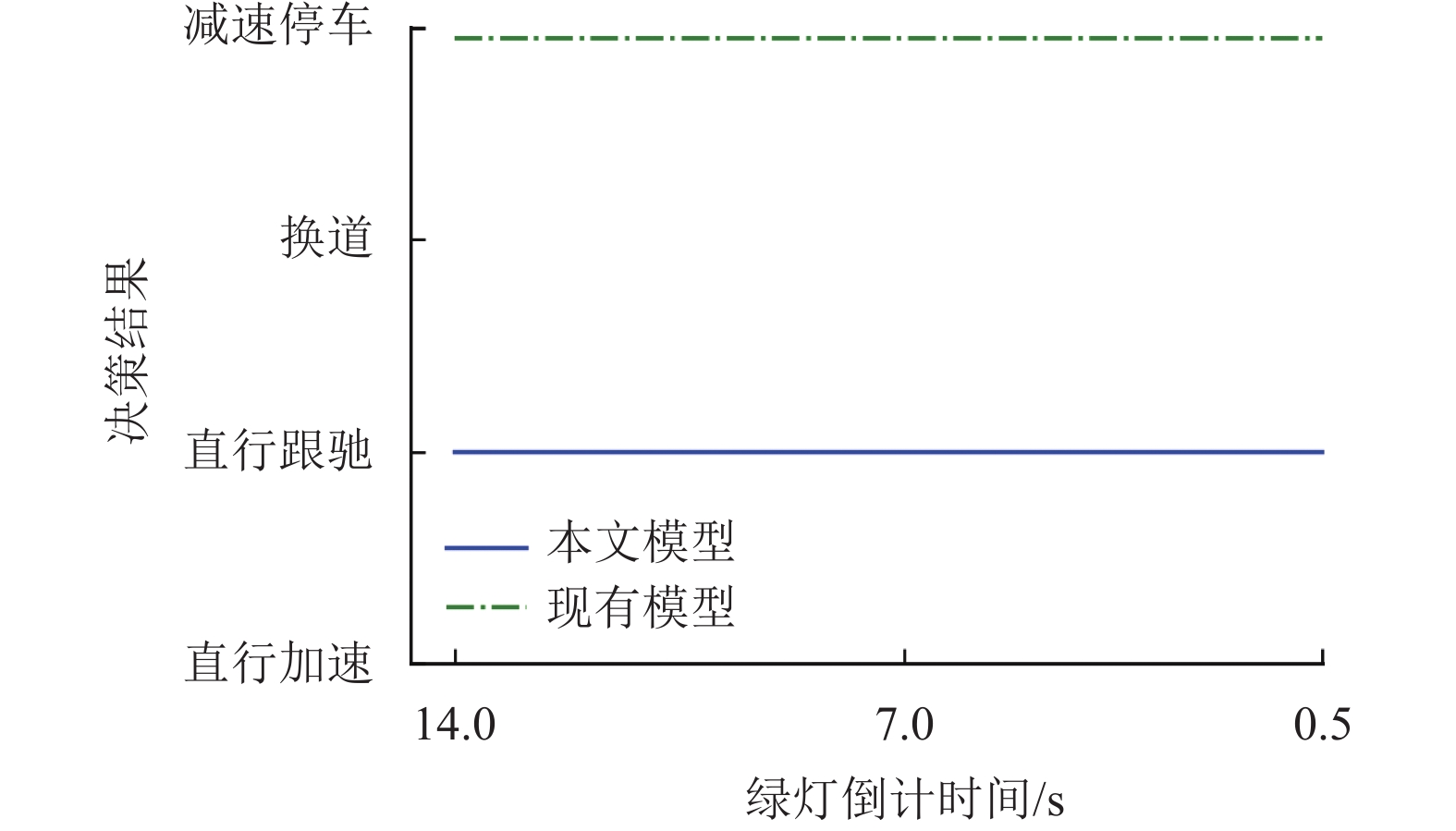
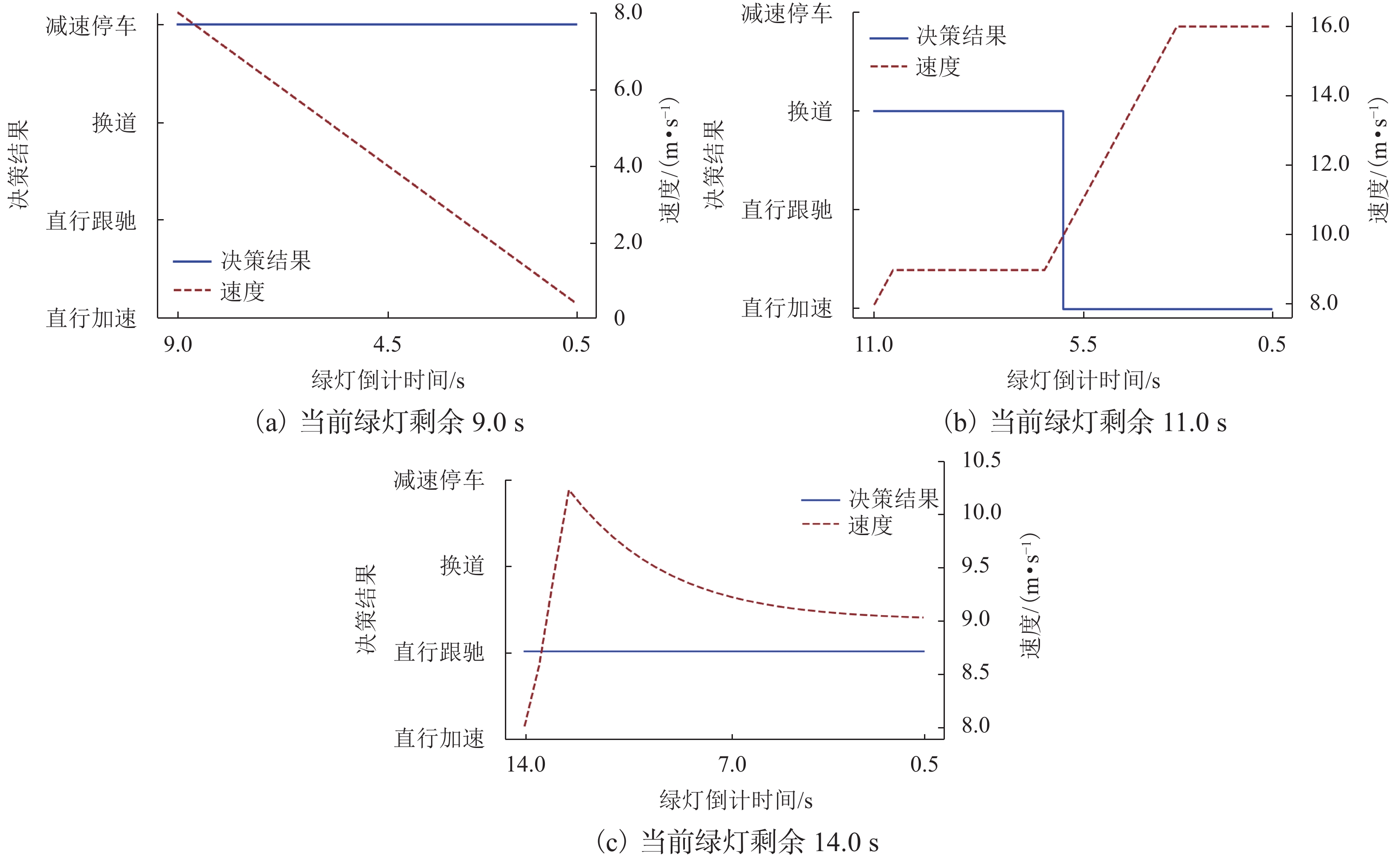
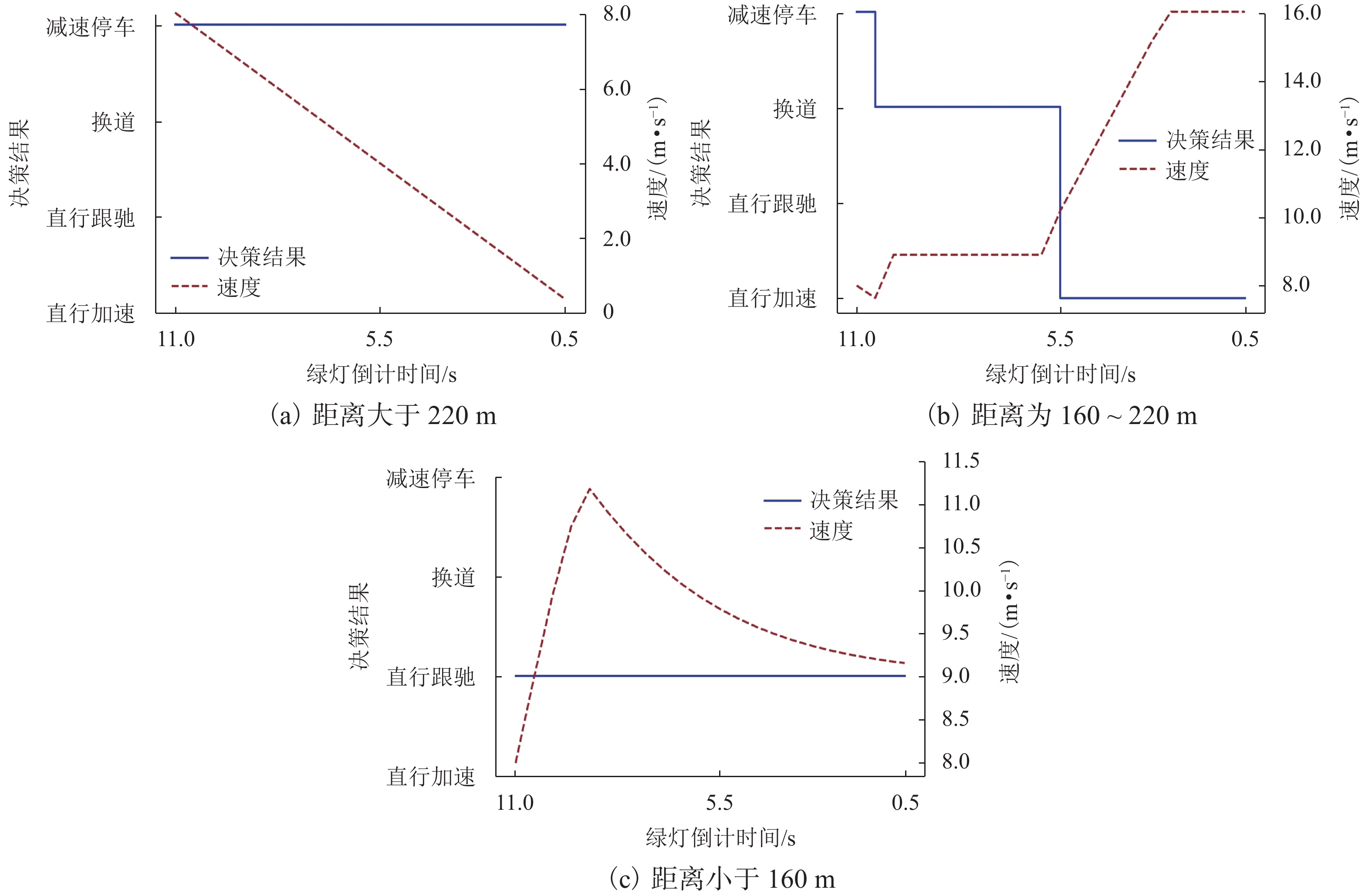
为使智能网联汽车(intelligent connected vehicle, ICV)在复杂交通环境下高效、安全地通过信号交叉口,在车联网实时获取信号灯和前车状态信息的基础上,建立了智能网联汽车通过信号交叉口的驾驶行为决策框架. 通过跟驰模型推导智能网联汽车和前方车辆在未来的行驶状态,预测得到前方车辆是否要通过交叉口的行为,进一步分别对智能网联汽车是领头车和跟随车时通过交叉口停止线的条件进行判断;将换道加入到驾驶方式中来寻求更高的通行效率,用基于换道时间模型的方法判断智能网联汽车换道后的通过条件;仿真对比分析了所提出模型和现有模型的决策能力,讨论了影响决策过程的关键因素. 研究结果表明:相比于现有模型,综合信号灯和前车行驶意图的决策方法能够提高智能网联汽车对通行条件判断的准确性,从而进行更合理的行为选择,随着单位绿灯剩余时间的增加,车辆决策通过交叉口的概率可提高20%,当前车道的车辆位置对决策结果影响显著.


 高级检索
高级检索
 Email alert
Email alert RSS
RSS 摘要
摘要 HTML全文
HTML全文 PDF 2068KB
PDF 2068KB 附件
附件 施引文献
施引文献