

Behavior Decision of Intelligent Connected Vehicles Considering Status of Preceding Vehicles at Intersections
-
摘要:
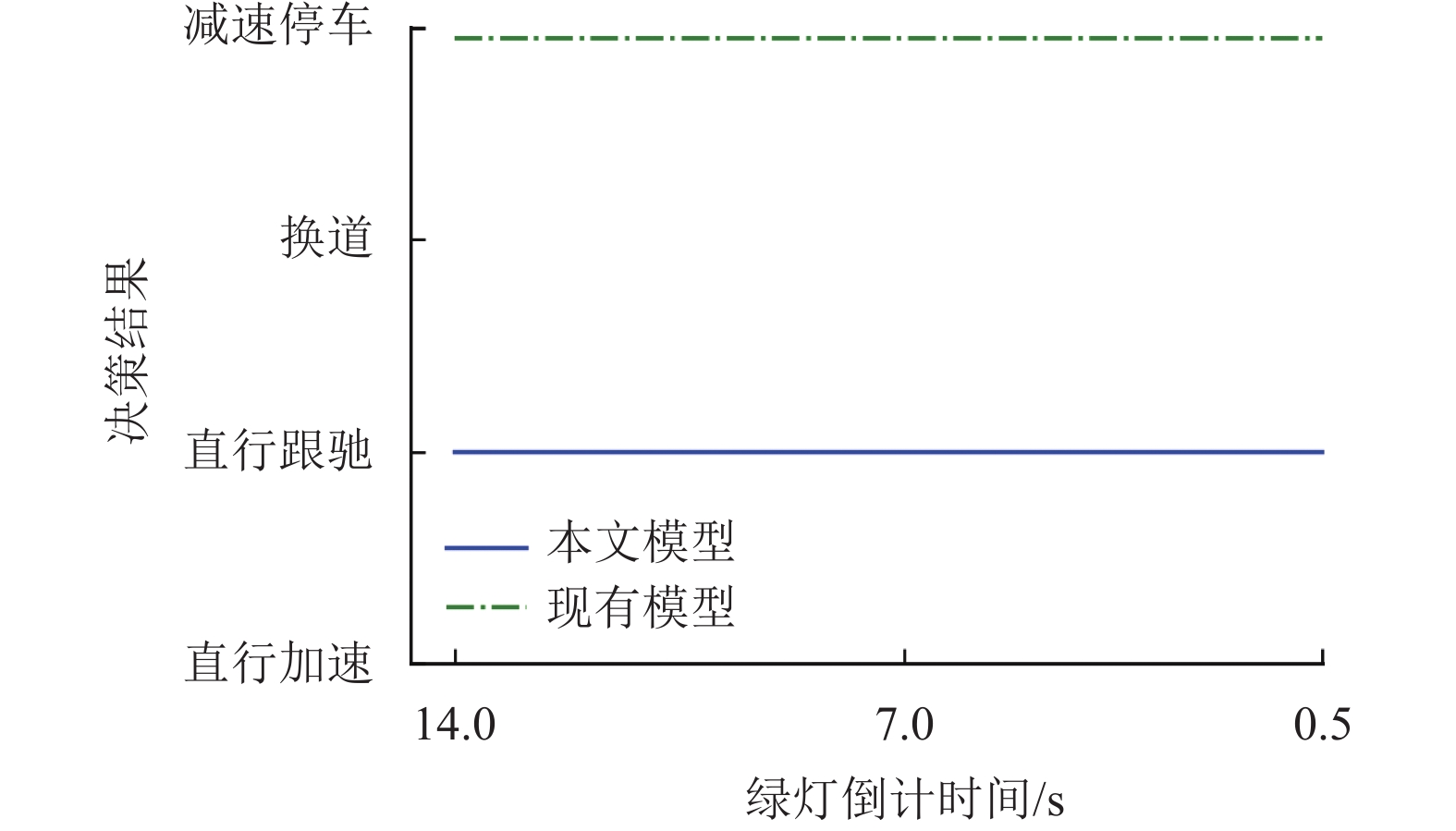
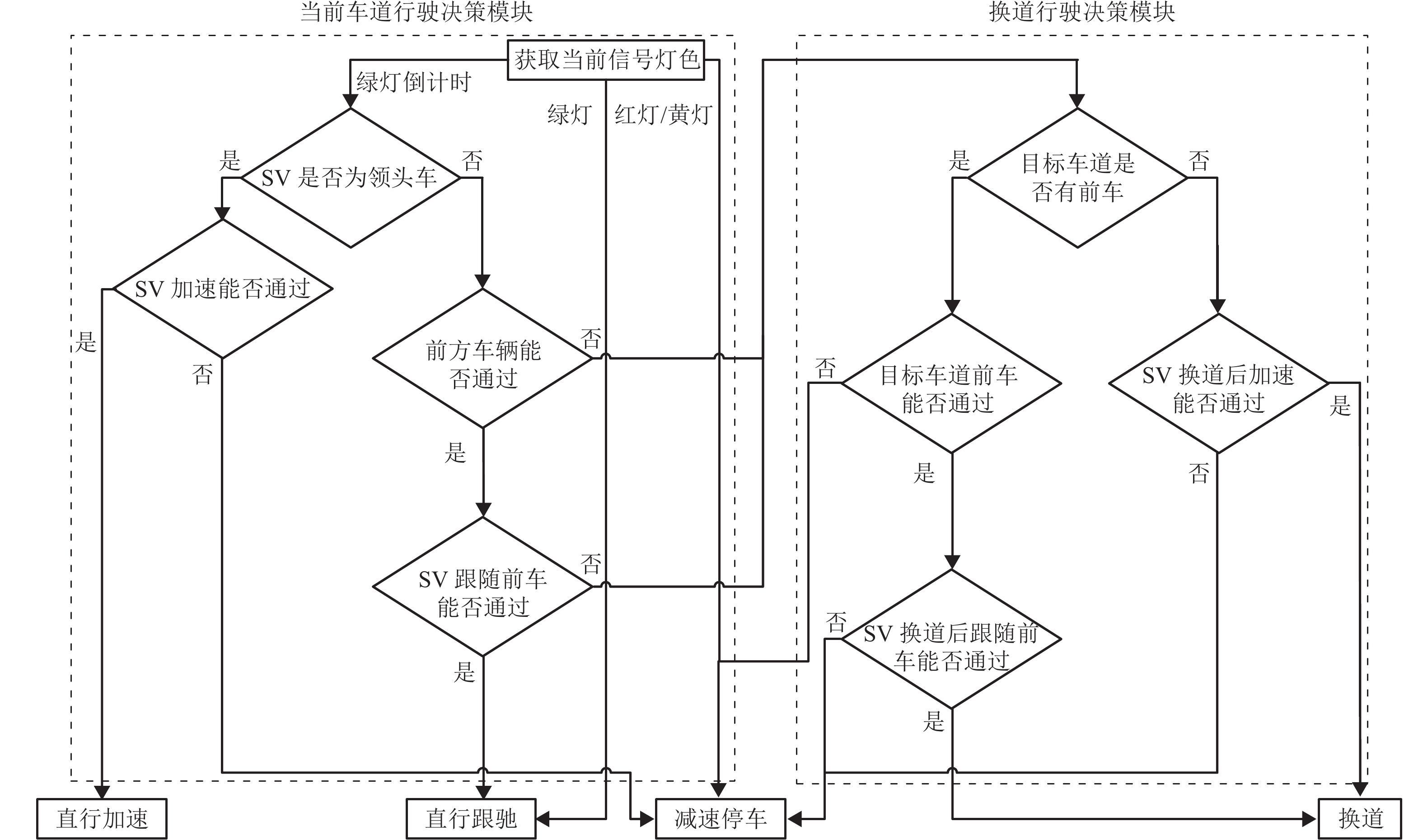
为使智能网联汽车(intelligent connected vehicle, ICV)在复杂交通环境下高效、安全地通过信号交叉口,在车联网实时获取信号灯和前车状态信息的基础上,建立了智能网联汽车通过信号交叉口的驾驶行为决策框架. 通过跟驰模型推导智能网联汽车和前方车辆在未来的行驶状态,预测得到前方车辆是否要通过交叉口的行为,进一步分别对智能网联汽车是领头车和跟随车时通过交叉口停止线的条件进行判断;将换道加入到驾驶方式中来寻求更高的通行效率,用基于换道时间模型的方法判断智能网联汽车换道后的通过条件;仿真对比分析了所提出模型和现有模型的决策能力,讨论了影响决策过程的关键因素. 研究结果表明:相比于现有模型,综合信号灯和前车行驶意图的决策方法能够提高智能网联汽车对通行条件判断的准确性,从而进行更合理的行为选择,随着单位绿灯剩余时间的增加,车辆决策通过交叉口的概率可提高20%,当前车道的车辆位置对决策结果影响显著.
Abstract:To enable intelligent connected vehicles (ICV) pass through signalized intersections efficiently and safely in complex traffic environments, on the basis of real-time acquisition of signal lights and preceding vehicle status information in the internet of vehicles, the driving behavior decision framework of ICV through signalized intersections in the ICV environment was established.The car-following model was used to derive the future driving status of ICV and vehicles ahead,then to predict whether the preceding vehicles will pass through the intersection, and further to judge the conditions for passing the intersection stop line when the ICVis the leader or the follower.The lane change was addedin the driving mode toseek higher traffic efficiency, and the method based on the lane change time model was used to judge the passing conditions after the ICV changesa lane.Through simulation comparison, the decision-making ability of the proposed model and the existing model was analyzed, the key factors that affect the decision-making process were discussed. Compared with the existing model, the decision method of combining signal lights and the driving intention of the preceding vehicle can improve the judgmentaccuracy of ICVs on passing conditions and realize reasonable decision-making.With the increasing of the remaining time per unit green light, the probability of vehicles passing through the intersection can be increased by 20%, and vehicle positions in the current lane have significant influence on decision result.
-
Key words:
- behavior decision /
- prediction /
- car-following model /
- lane change /
- intelligent connected vehicle /
- intersections
-
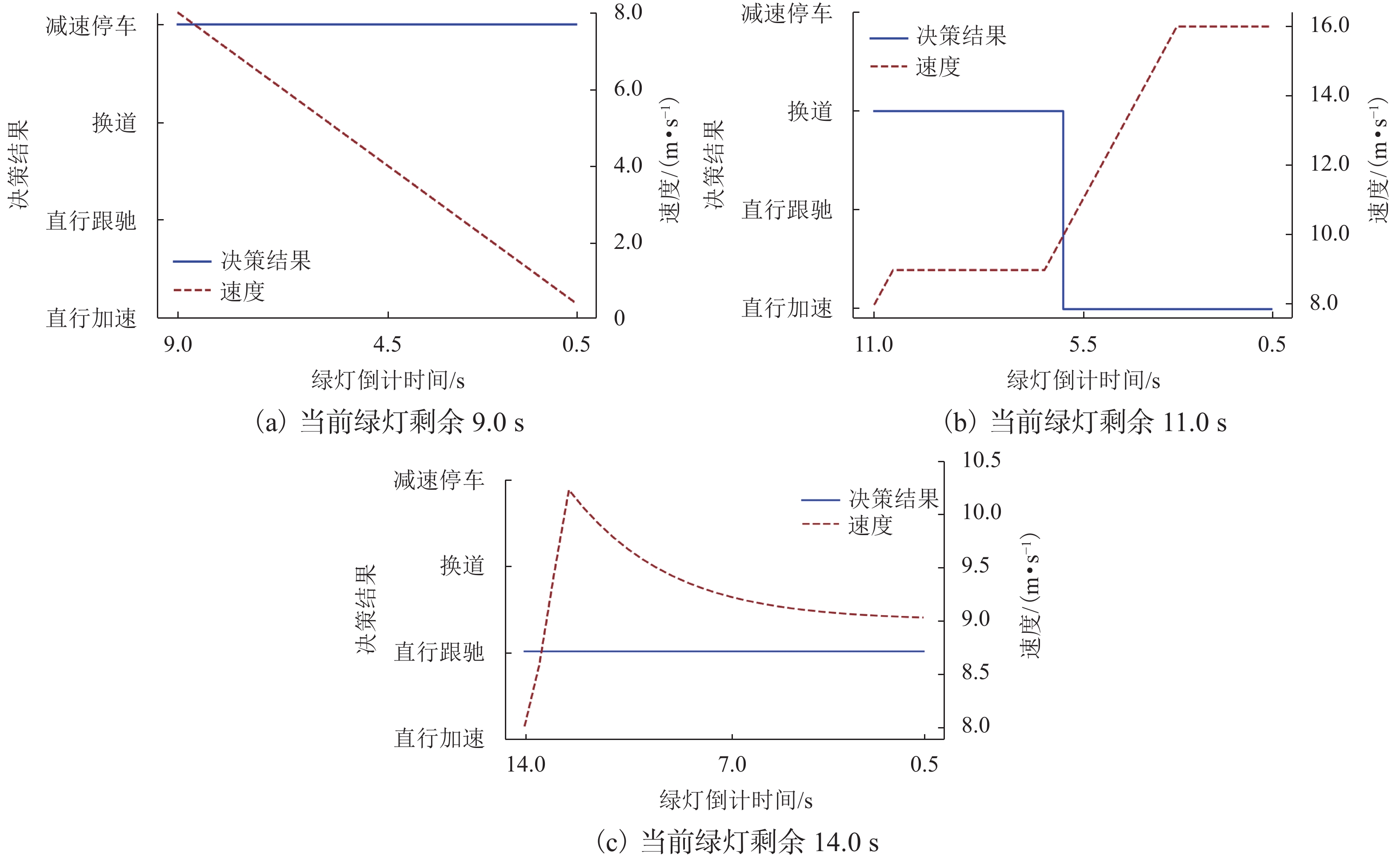
图 6 不同绿灯剩余时间的决策过程和速度变化
Figure 6. Decision-making process and speed change of different remaining time of green light
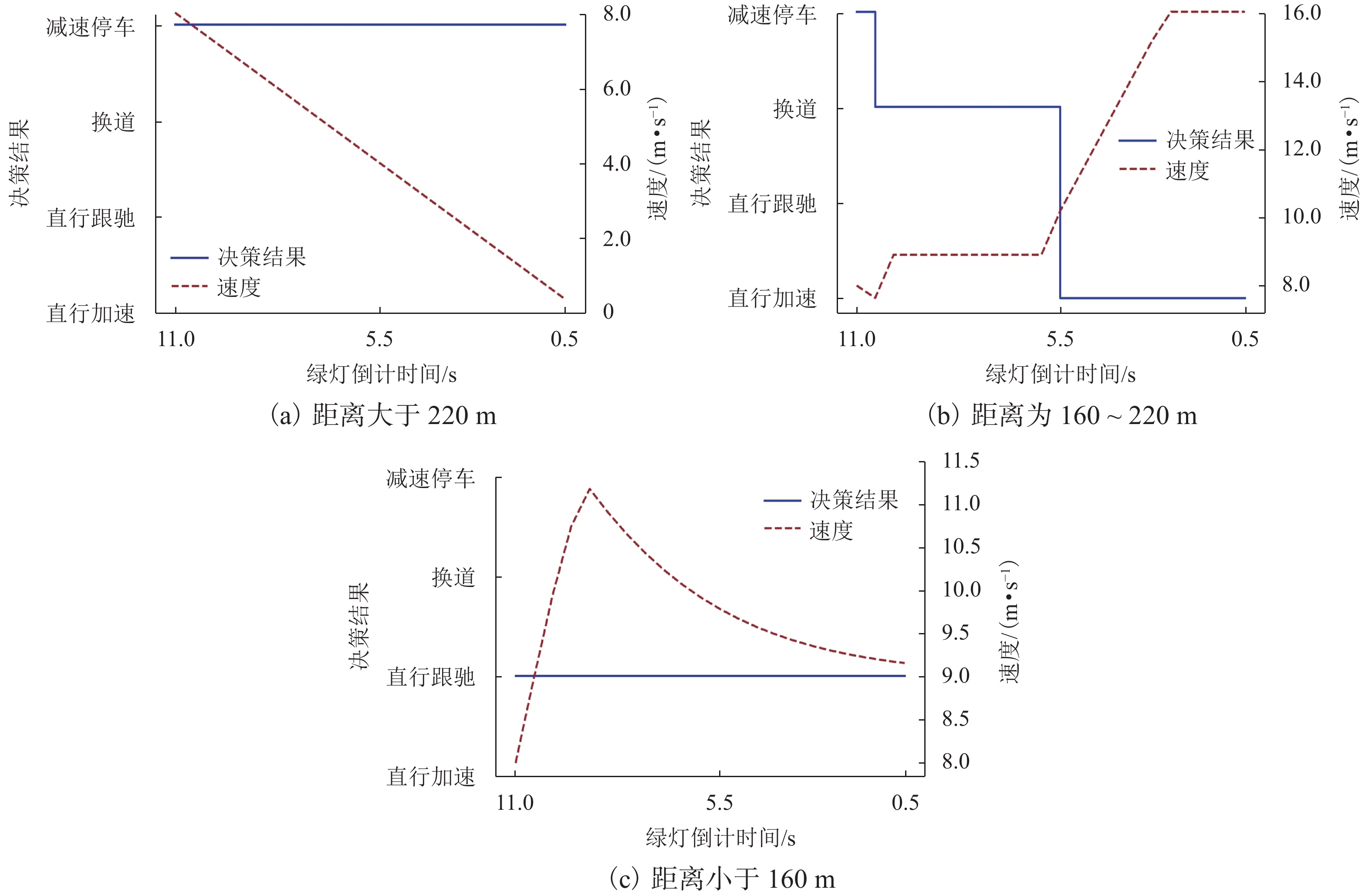
图 7 不同当前车道车辆位置的决策过程和速度变化
Figure 7. Decision process and speed change of different vehicle positions in current lane
表 1 不同绿灯剩余时间的场景输入
Table 1. Scene input information for different green light countdown time
输入信息 数值 输入信息 数值 停止线位置/m 300 SV当前位置/m 171 道路最大限速值/(km•h−1) 60 SV当前速度/(km•h−1) 29 最大舒适加速度/(m•s−2) 2 当前车道头车位置/m 200 最大制动减速度/(m•s−2) 3 相邻车道头车位置/m 290  下载: 导出CSV
下载: 导出CSV
表 2 不同当前车道车辆位置的场景输入
Table 2. Scene input information for different vehicle positions in current lane
输入信息 数值 输入信息 数值 当前绿灯剩余时间/s 11 最大制动减速度/
(m•s−2)3 停止线位置/m 300 SV当前速度/(km•h−1) 29 道路最大限速值/(km•h−1) 60 当前车道头车位置 最大舒适加速度/(m•s−2) 2 相邻车道头车位置/m 290
下载: 导出CSV
-
[1] GALCERAN E, CUNNINGHAM A G, EUSTICE R M, et al. Multipolicy decision-making for autonomous driving via changepoint-based behavior prediction:Theory and experiment[J]. Autonomous Robots, 2017, 41(6): 1367-1382. doi: 10.1007/s10514-017-9619-z [2] GOODALL N J. Ethical decision making during automated vehicle crashes[J]. Transportation Research Record:Journal of the Transportation Research Board, 2014, 2424(1): 58-65. doi: 10.3141/2424-07 [3] GAO H B, SHI G Y, XIE G T, et al. Car-following method based on inverse reinforcement learning for autonomous vehicle decision-making[J]. International Journal of Advanced Robotic Systems, 2018, 15(6): 1729881418817162.1-1729881418817162.11. [4] YE Y J, ZHANG X H, SUN J. Automated vehicle’s behavior decision making using deep reinforcement learning and high-fidelity simulation environment[J]. Transportation Research Part C:Emerging Technologies, 2019, 107: 155-170. doi: 10.1016/j.trc.2019.08.011 [5] GALCERAN E, OLSON E, EUSTICE R M. Augmented vehicle tracking under occlusions for decision-making in autonomous driving[C]//2015 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). Hamburg: IEEE, 2015: 3559-3565. [6] TIAN R, LI S S, LI N, et al. Adaptive game-theoretic decision making for autonomous vehicle control at roundabouts[C]//2018 IEEE Conference on Decision and Control (CDC). Miami: IEEE, 2018: 321-326. [7] CHEN Z, ZHANG Y L, LV J, et al. Model for optimization of ecodriving at signalized intersections[J]. Transportation Research Record:Journal of the Transportation Research Board, 2014, 2427(1): 54-62. doi: 10.3141/2427-06 [8] RAKHA H, ZOHDY I. Optimizing driverless vehicles at intersections[C]//19th ITS World Congress. Vienna: [s.n.], 2012: 1-12. [9] 高祥. 车联网环境下信号交叉口通行方法研究[D]. 烟台: 烟台大学, 2016. [10] ASADI B, VAHIDI A. Predictive cruise control:utilizing upcoming traffic signal information for improving fuel economy and reducing trip time[J]. IEEE Transactions on Control Systems Technology, 2011, 19(3): 707-714. doi: 10.1109/TCST.2010.2047860 [11] LI Z F, ELEFTERIADOU L, RANKA S. Signal control optimization for automated vehicles at isolated signalized intersections[J]. Transportation Research Part C:Emerging Technologies, 2014, 49: 1-18. doi: 10.1016/j.trc.2014.10.001 [12] HE X Z, LIU H X, LIU X B. Optimal vehicle speed trajectory on a signalized arterial with consideration of queue[J]. Transportation Research Part C:Emerging Technologies, 2015, 61: 106-120. doi: 10.1016/j.trc.2015.11.001 [13] MAHLER G, VAHIDI A. An optimal velocity-planning scheme for vehicle energy efficiency through probabilistic prediction of traffic-signal timing[J]. IEEE Transactions on Intelligent Transportation Systems, 2014, 15(6): 2516-2523. doi: 10.1109/TITS.2014.2319306 [14] 刘欢,杨雷,邵社刚,等. 车路协同环境下信号交叉口速度引导策略[J]. 重庆交通大学学报(自然科学版),2019,38(12): 8-17. doi: 10.3969/j.issn.1674-0696.2019.12.02LIU Huan, YANG Lei, SHAO Shegang, et al. Speed guidance strategies at signalized intersections in a vehicle infrastructure cooperative environment[J]. Journal of Chongqing Jiaotong University (Natural Science), 2019, 38(12): 8-17. doi: 10.3969/j.issn.1674-0696.2019.12.02 [15] WU G Y, BORIBOONSOMSIN K, XIA H T, et al. Supplementary benefits from partial vehicle automation in an ecoapproach and departure application at signalized intersections[J]. Transportation Research Record:Journal of the Transportation Research Board, 2014, 2424(1): 66-75. doi: 10.3141/2424-08 [16] DE NUNZIO G, DE WIT C C, MOULIN P, et al. Eco-driving in urban traffic networks using traffic signals information[J]. International Journal of Robust and Nonlinear Control, 2016, 26(6): 1307-1324. doi: 10.1002/rnc.3469 [17] PARK C, KEE S C. Implementation of autonomous driving vehicle at an intersection with traffic light recognition and vehicle controls[J]. Transactions of the Korean Society of Automotive Engineers, 2019: 542-549. [18] ZHOU Mofan, YU Yang, QU Xiaobo. Development of an efficient driving strategy for connected and automated vehicles at signalized intersections:a reinforcement learning approach[J]. IEEE Transactions on Intelligent Transportation Systems, 2020, 21(1): 433-443. doi: 10.1109/TITS.2019.2942014 [19] LIU Y T, OZGUNER U. Human driver model and driver decision making for intersection driving[C]//2007 IEEE Intelligent Vehicles Symposium. Istanbul: IEEE, 2007: 642-647. [20] 苏冲,孟祥雨,张成阳. 无人驾驶车辆路口行驶决策研究[J]. 汽车实用技术,2019(15): 29-31.SU Chong, MENG Xiangyu, ZHANG Chengyang. Research on decision making of intersection of autonomous vehicle[J]. Automobile Applied Technology, 2019(15): 29-31. [21] GADEPALLY V, KRISHNAMURTHY A, OZGUNER U. A framework for estimating driver decisions near intersections[J]. IEEE Transactions on Intelligent Transportation Systems, 2014, 15(2): 637-646. doi: 10.1109/TITS.2013.2285159 [22] DE BEAUCORPS P, STREUBEL T, VERROUST-BLONDET A, et al. Decision-making for automated vehicles at intersections adapting human-like behavior[C]//2017 IEEE Intelligent Vehicles Symposium (IV). Los Angeles: IEEE, 2017: 212-217. [23] 杜明博. 基于人类驾驶行为的无人驾驶车辆行为决策与运动规划方法研究[D]. 合肥: 中国科学技术大学, 2016. [24] DE CAMPOS G R, FALCONE P, SJÖBERG J. Autonomous cooperative driving: a velocity-based negotiation approach for intersection crossing[C]//16th International IEEE Conference on Intelligent Transportation Systems (ITSC 2013). The Hague: IEEE, 2013: 1456-1461. [25] ALONSO J, MILANÉS V, PÉREZ J, et al. Autonomous vehicle control systems for safe crossroads[J]. Transportation Research Part C:Emerging Technologies, 2011, 19(6): 1095-1110. doi: 10.1016/j.trc.2011.06.002 [26] 宋威龙,熊光明,王诗源,等. 基于驾驶员类型分析的智能车辆交叉口行为决策[J]. 北京理工大学学报,2016,36(9): 917-922.SONG Weilong, XIONG Guangming, WANG Shiyuan, et al. Decision making for intelligent vehicles based on driver type analyzing in an intersection[J]. Transactions of Beijing Institute of Technology, 2016, 36(9): 917-922. [27] MAKAREM L, GILLET D. Model predictive coordination of autonomous vehicles crossing intersections[C]//16th International IEEE Conference on Intelligent Transportation Systems (ITSC 2013). Hague: IEEE, 2013: 1799-1804. [28] BEST A, NARANG S, BARBER D, et al. AutonoVi: Autonomous vehicle planning with dynamic maneuvers and traffic constraints[C]//2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). Vancouver: IEEE, 2017: 2629-2636. [29] LIU C, LEE S, VARNHAGEN S, et al. Path planning for autonomous vehicles using model predictive control[C]//2017 IEEE Intelligent Vehicles Symposium (IV). Los Angeles: IEEE, 2017: 174-179. [30] YANG D, JIN P, PU Y, et al. Safe distance car-following model including backward-looking and its stability analysis[J]. The European Physical Journal B, 2013, 86(3): 92. doi: 10.1140/epjb/e2012-30688-6 [31] YANG D, ZHENG S Y, WEN C, et al. A dynamic lane-changing trajectory planning model for automated vehicles[J]. Transportation Research Part C:Emerging Technologies, 2018, 95: 228-247. doi: 10.1016/j.trc.2018.06.007 -

 下载:
下载:


 点击查看大图
点击查看大图
计量
- 文章访问数: 636
- HTML全文浏览量: 454
- PDF下载量: 42
- 被引次数: 0