

Optimization Design of Interface Layout of High-Speed Railway Control Console Based on Attention Distribution
-
摘要:
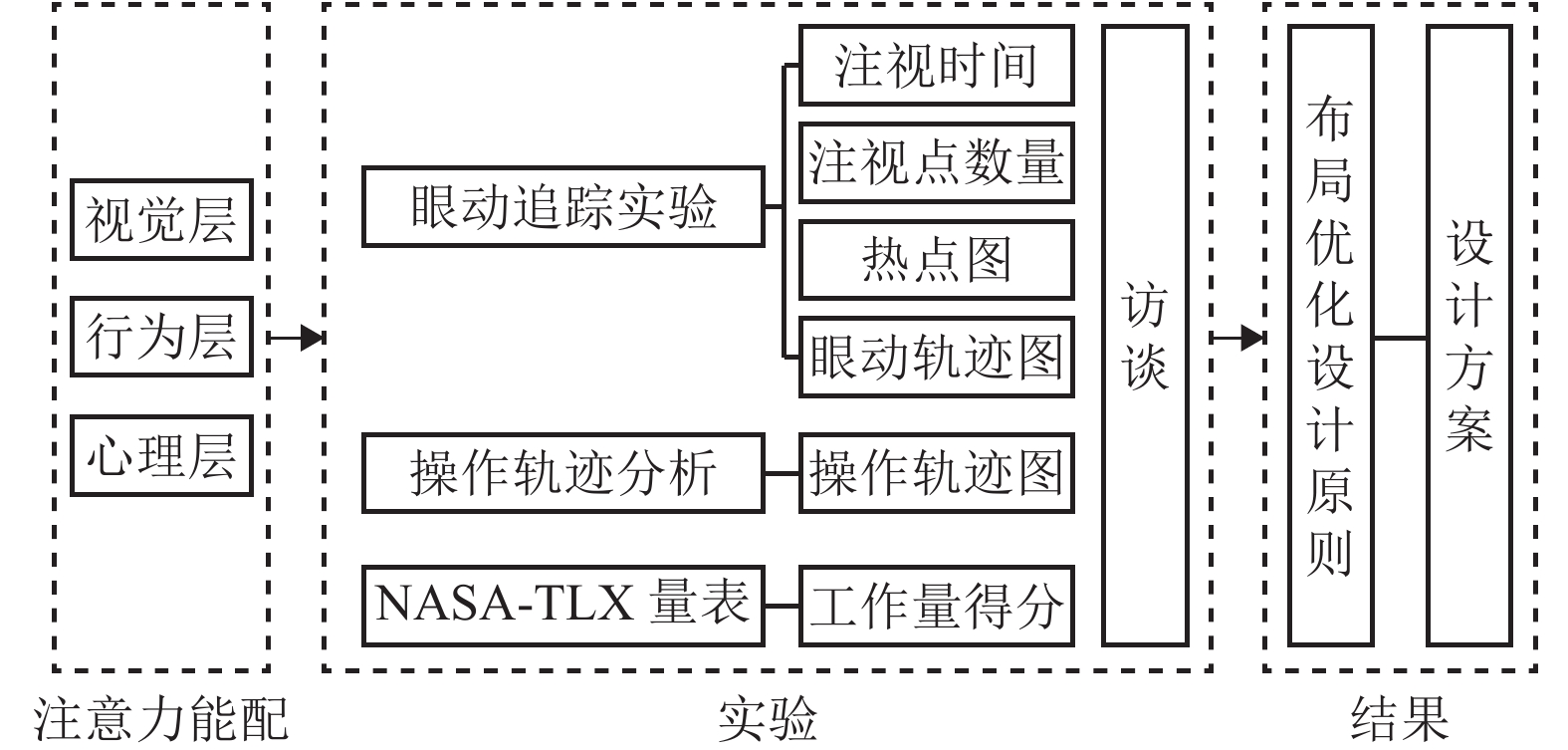
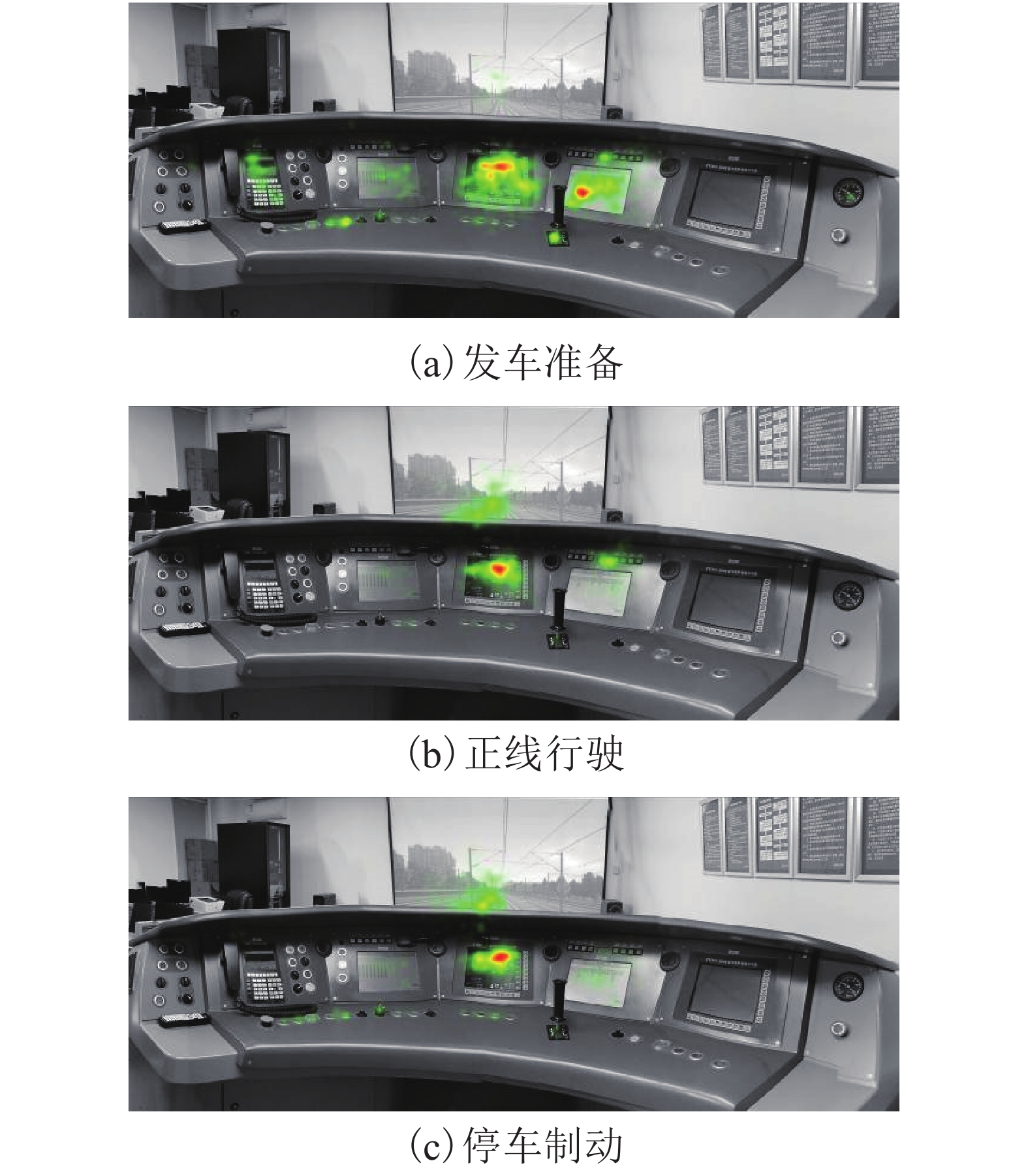
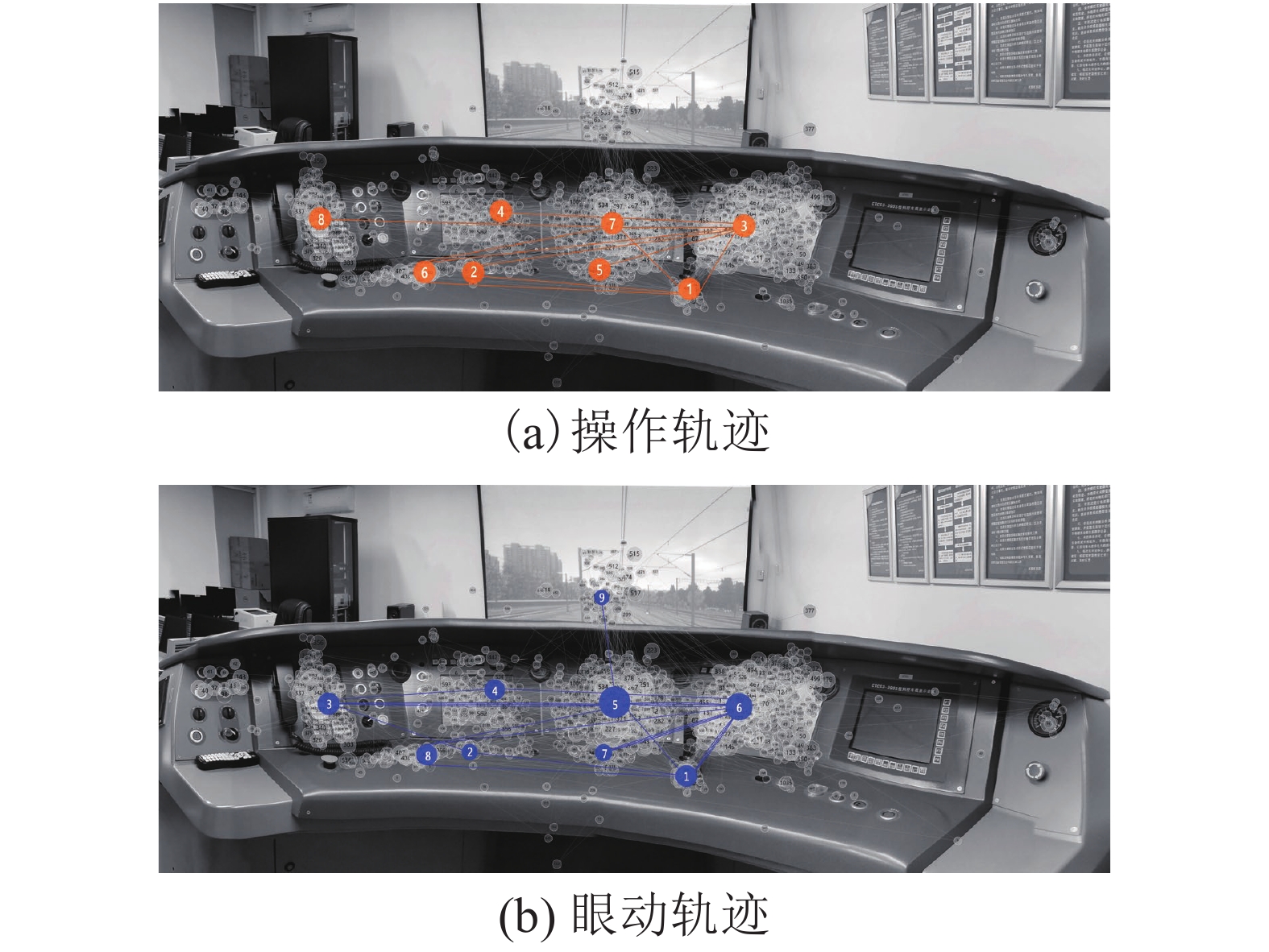
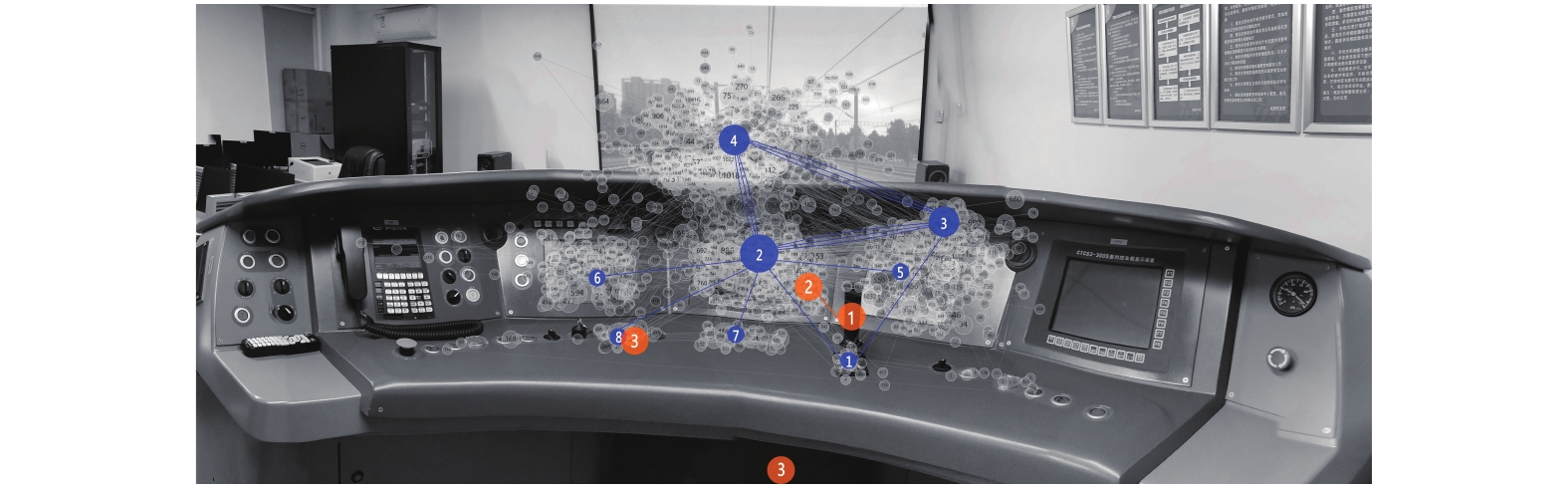
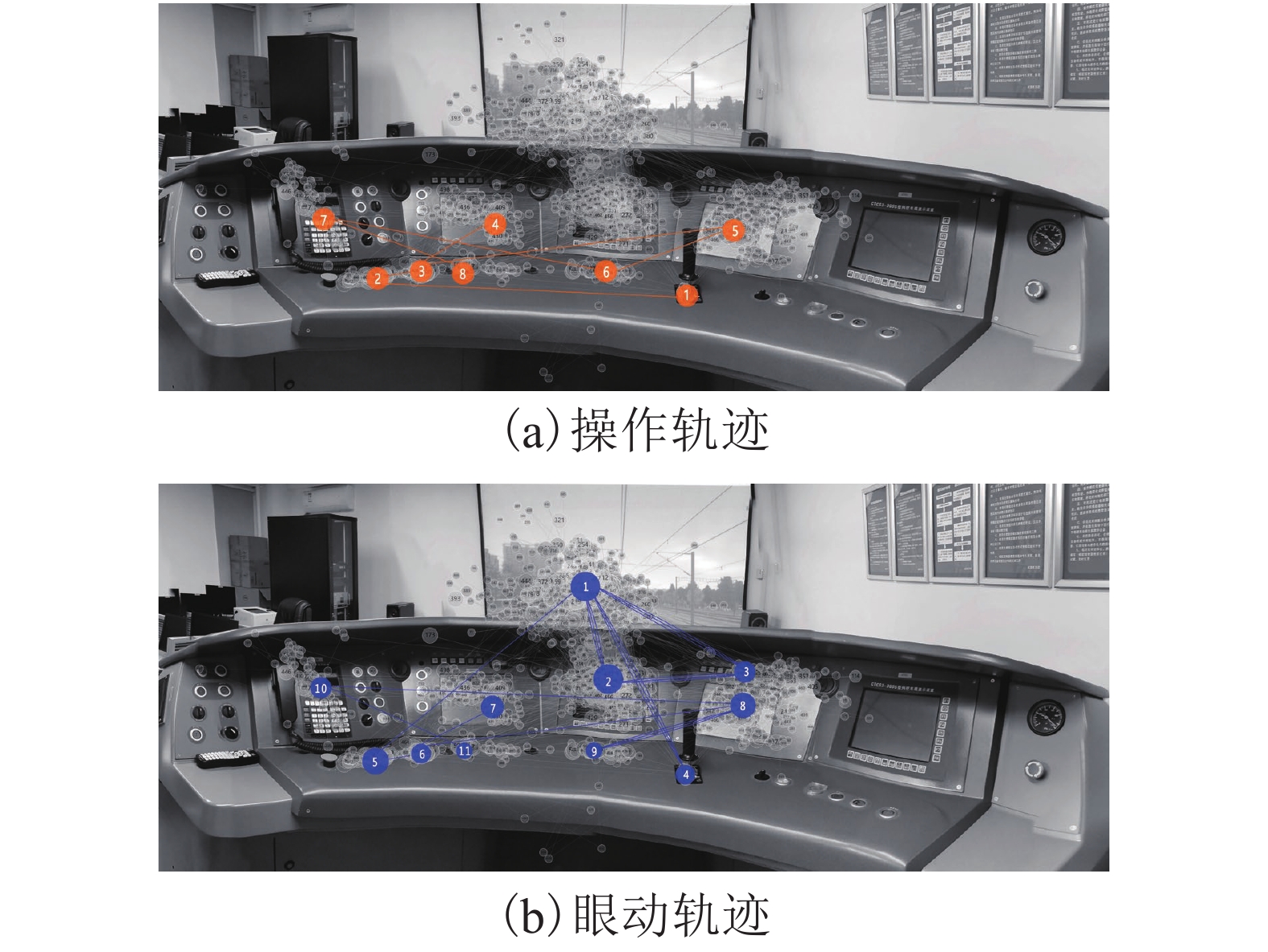
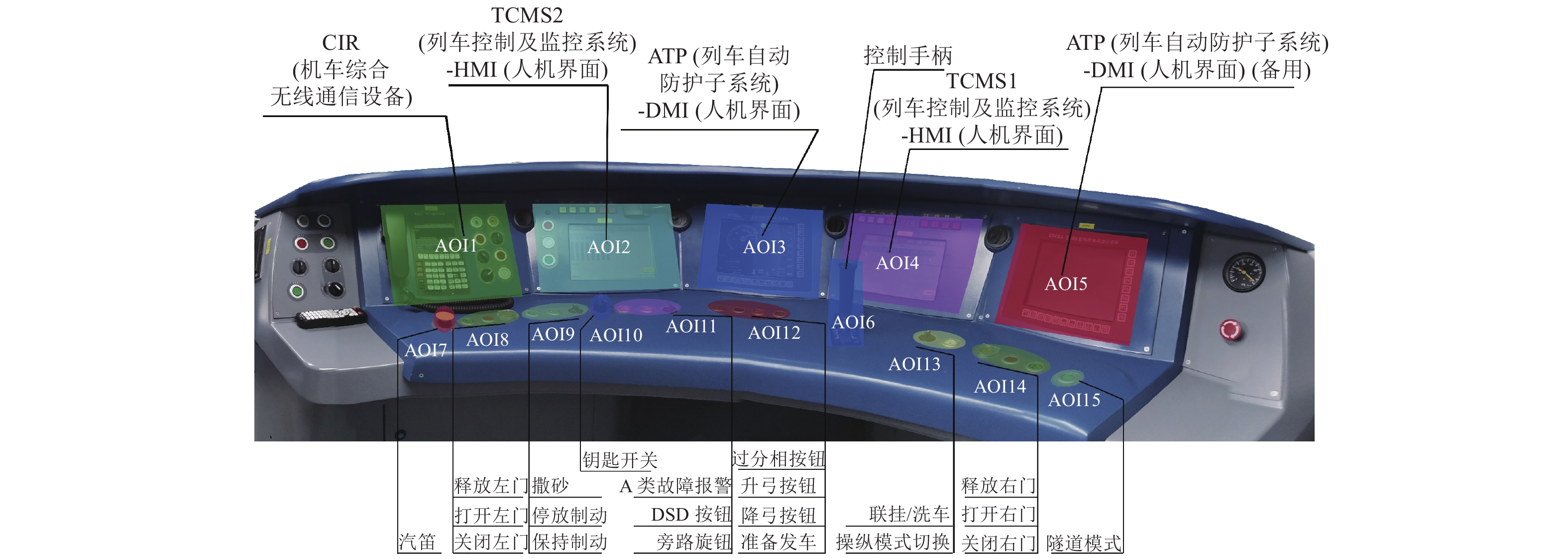
为了研究驾驶员在高铁操纵台界面的注意力分配情况,以达到优化高铁操纵台界面布局设计的目的,采用CRH380D列车仿真平台,通过模拟驾驶实验的形式测定成都机务段动车运用车间14名驾驶员的注意力分配情况. 首先,将驾驶员的值乘过程分为发车准备、正线行驶、停车制动3个任务;其次,从视觉层、行为层、心理层3个维度出发,分别采集被试在3个任务中的眼动数据、操作轨迹、NASA-TLX量表主观工作负荷;最后,结合与被试的深度访谈,得出驾驶员对CRH380D列车操纵台界面的注意力分配情况. 研究结果表明:在CRH380D列车操纵台目前的界面布局设计中,驾驶员在执行驾驶任务时注意力分配最高的为ATP,其次为TCMS1;水平操纵面上21个开关按钮中,占用注意力较多的为开车门、停放制动和升弓、降弓按钮;眼动轨迹图与操作轨迹图比较复杂,驾驶员的主观工作负荷相对较高;根据实验结果总结出高铁操纵台界面布局设计的4条原则及一些相应的设计建议,并以CRH380D列车为例,得出其操纵台界面布局优化设计方案.
Abstract:In order to study the drivers’ attention allocation on the interface of high-speed railway control console, and finally achieve the purpose of optimizing the interface layout design of high-speed railway control console, the CRH380D train simulation platform was adopted, and the attention allocation of 14 drivers in the Chengdu locomotive depot high-speed train application workshop was measured by simulated driving experiment. Firstly, the driver’s on duty process was divided into three tasks: departure preparation, main line driving, and parking braking. Secondly, eye movement data, operation trajectory, and NASA-TLX subjective workload of the tested subjects in the three tasks were collected from the visual, behavioral, and psychological layers respectively. Finally, combined with the in-depth interview with the tested subjects, the attention allocation of the drivers to the CRH380D train control console interface was obtained. The results show that, in the current interface layout design of CRH380D train control console, ATP is the highest concentration distribution, followed by TCMS1. Among the 21 switch buttons on the horizontal control surface, the ones that attract more attention are the driving door, the parking brake, and the lifting/lowering buttons. Driver’s eye movement trajectory map and operation trajectory map are more complex, and driver's subjective workload is relatively high. According to the experimental results, four principles of interface layout design for high-speed railway control console and some corresponding design suggestions are summarized. Taking CRH380D train as an example, the optimal design scheme of high-speed railway control console interface layout is obtained.
-
表 1 AOI数据
Table 1. AOI data
任务 指标 系统显示屏 手柄 开关按钮 AOI1 AOI2 AOI3 AOI4 AOI5 AOI6 AOI7 AOI8 A0I9 AOI10 AOI11 AOI12 AOI13 AOI14 AOI15 发车
准备注视时间/s 10.41 4.94 54.44 50.19 0.36 2.25 0 0.37 4.00 0.40 0.10 1.00 0.05 0.04 0 占比/% 7.90 3.85 42.44 39.13 0.29 1.75 0 0.29 3.12 0.31 0.08 0.78 0.04 0.03 0 注视点数量 41.25 29.08 275.17 207.33 0.42 11.92 0 1.83 17.67 2.42 0.83 6.00 0.33 0.33 0 正线
行驶注视时间/s 0.01 3.94 73.23 26.19 0.01 0.34 0 0.01 0.05 0.01 0.59 0.88 0.02 0.02 0 占比/% 0.01 3.74 69.54 24.87 0.01 0.33 0 0.01 0.04 0.01 0.56 0.84 0.02 0.02 0 注视点数量 0.17 20.92 352.42 106.50 0.08 2.67 0 0.08 0.17 0.08 3.00 4.75 0.25 0.17 0 停车
制动注视时间/s 0.97 2.63 81.10 8.57 0.05 0.33 0 2.14 1.98 0.85 0.22 1.49 0 0 0 占比/% 0.96 2.62 80.82 8.54 0.05 0.33 0 2.14 1.97 0.84 0.22 1.49 0 0 0 注视点数量 5.50 14.00 290.25 41.42 0.25 1.75 0 10.42 8.08 4.83 1.42 7.33 0 0 0  下载: 导出CSV
下载: 导出CSV
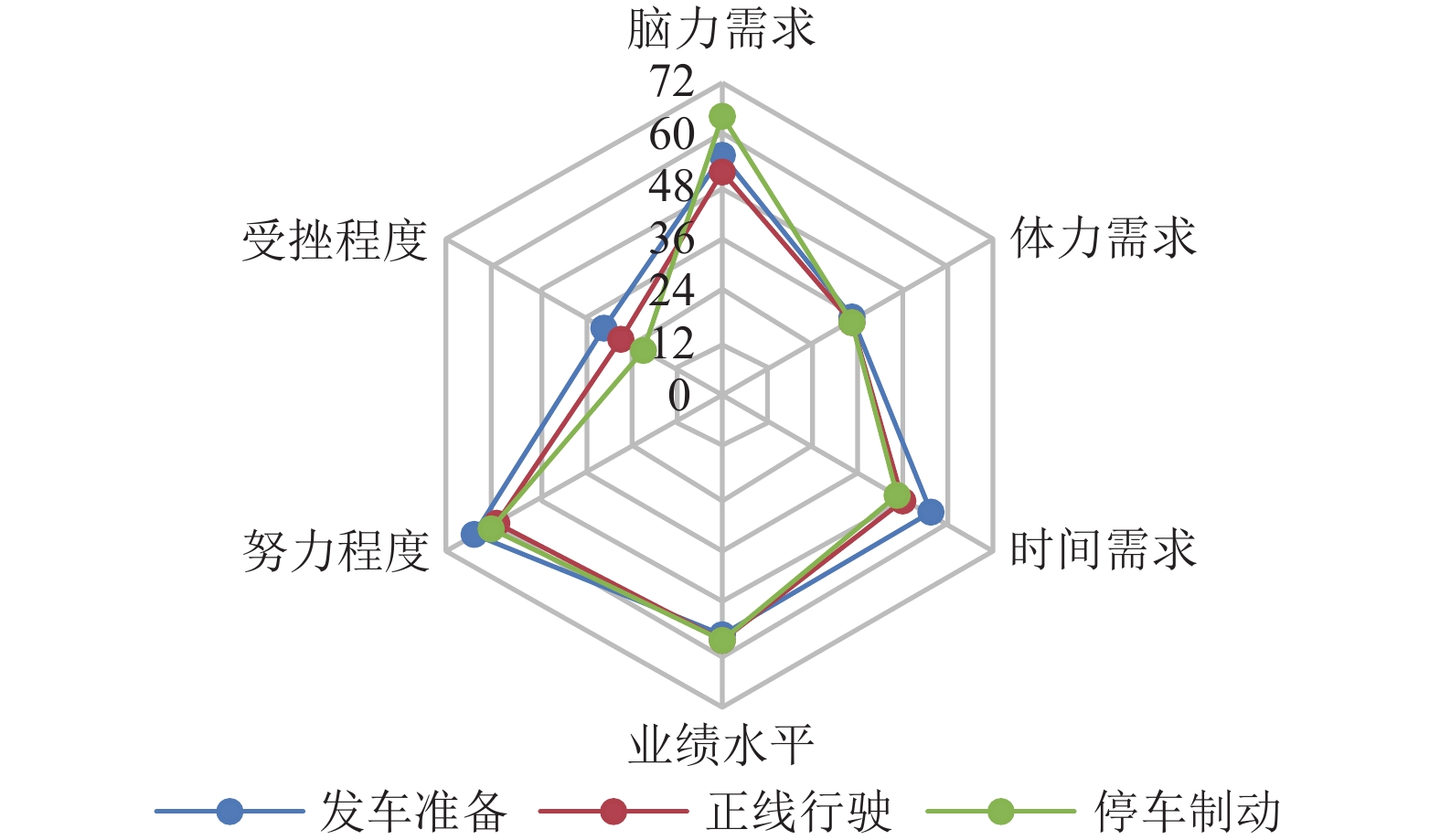
表 2 单个任务得分
Table 2. Individual task score
分 任务 脑力
需求体力
需求时间
需求业绩
水平努力
程度受挫
程度发车
准备55.00 35.00 55.00 54.64 64.64 30.36 正线
行驶51.07 34.64 47.86 56.07 58.57 26.07 停车
制动64.29 33.93 45.71 56.07 60.36 20.71
下载: 导出CSV
表 3 整个驾驶过程的总体工作量得分
Table 3. Overall workload score of the whole driving process
分 被试 1 2 3 4 5 6 7 8 9 10 11 12 13 14 得分 68.00 47.33 62.33 58.67 64.33 40.00 59.00 54.67 37.33 47.00 49.00 62.00 56.67 42.33
下载: 导出CSV
-
[1] 冀丽俊. 国内轨道交通驾驶室人机工程设计研究[D]. 武汉: 武汉理工大学, 2014. [2] 胥川,郭启明,王雪松. 疲劳预警分级提示下的驾驶行为响应特征[J]. 西南交通大学学报,2019,54(1): 189-195.XU Chuan, GUO Qiming, WANG Xuesong. Driver behavior response to drowsiness alarming at different levels[J]. Journal of Southwest Jiaotong University, 2019, 54(1): 189-195. [3] 朱彤,吴玲,路巧珍. 车载信息对驾驶人眨眼特性及负荷的影响规律[J]. 西南交通大学学报,2015,50(3): 504-510. doi: 10.3969/j.issn.0258-2724.2015.03.019ZHU Tong, WU Ling, LU Qiaozhen. Effects of in-vehicle information on driver eye blink duration and workload[J]. Journal of Southwest Jiaotong University, 2015, 50(3): 504-510. doi: 10.3969/j.issn.0258-2724.2015.03.019 [4] 王洪宝,王金,支锦亦,等. 基于RAMSIS仿真的高速列车驾驶界面人机工效评估[J]. 机械设计,2020,37(1): 128-134.WANG Hongbao, WANG Jin, ZHI Jinyi, et al. Ergonomic evaluation of high-speed train driving interface based on RAMSIS simulation[J]. Journal of Machine Design, 2020, 37(1): 128-134. [5] 郭北苑. 高速列车驾驶界面人因适配性设计理论与方法研究[D]. 北京: 北京交通大学, 2010. [6] 钟玮. 汽车驾驶室人机界面概略评价研究[D]. 秦皇岛: 燕山大学, 2012. [7] BONNEY M C, WILLIAMS R W. CAPABLE. A computer program to layout controls and panels[J]. Ergonomics, 1977, 20(3): 297-316. doi: 10.1080/00140137708931629 [8] PULAT B M, AYOUB M A. A computer-aided panel layout procedure for process control jobs-LAYGEN[J]. IIE Transactions, 1985, 17(1): 84-93. doi: 10.1080/07408178508975275 [9] JUNG E S, PARK S, CHANG S Y. A CSP technique-based interactive control panel layout[J]. Ergonomics, 1995, 38(9): 1884-1893. doi: 10.1080/00140139508925236 [10] 陈德钧,方卫宁,秦永贞,等. 轨道车辆司机操纵台人机界面布局优化模型与算法[J]. 铁道学报,2014,36(11): 40-47. doi: 10.3969/j.issn.1001-8360.2014.11.009CHEN Dejun, FANG Weining, QIN Yongzhen, et al. Optimizing model and algorithm for human-machine interface layout of metro train driver's desk[J]. Journal of the China Railway Society, 2014, 36(11): 40-47. doi: 10.3969/j.issn.1001-8360.2014.11.009 [11] 支锦亦,杜洋,冯纾,等. 车载信息系统界面图文设计及其视认知特性研究综述[J]. 包装工程,2020,41(10): 62-70.ZHI Jinyi, DU Yang, FENG Shu. Review on the graphic design and perceptual characteristics of automobile system interface[J]. Packaging Engineering, 2020, 41(10): 62-70. [12] 詹自翔. 高速列车驾驶界面布局与适配性评价方法[D]. 北京: 北京交通大学, 2015. [13] 张亮,张继业,李田,等. 高速列车头型多目标气动优化设计[J]. 西南交通大学学报,2016,51(6): 1055-1063. doi: 10.3969/j.issn.0258-2724.2016.06.003ZHANG Liang, ZHANG Jiye, LI Tian, et al. Multi-objective aerodynamic optimization design for head shape of high-speed trains[J]. Journal of Southwest Jiaotong University, 2016, 51(6): 1055-1063. doi: 10.3969/j.issn.0258-2724.2016.06.003 [14] AFRIDI A H, MENGASH H A. NASA-TLX-based workload assessment for academic resource recommender system[J]. Personal and Ubiquitous Computing, 2020: 1-19. [15] 刘青,薛澄岐,FALK H. 基于眼动跟踪技术的界面可用性评估[J]. 东南大学学报(自然科学版),2010,40(2): 331-334.LIU Qing, XUE Chengqi, FALK H. Interface usability evaluation based on eye-tracking technology[J]. Journal of Southeast University (Natural Science Edition), 2010, 40(2): 331-334. -

 下载:
下载:



 点击查看大图
点击查看大图
计量
- 文章访问数: 667
- HTML全文浏览量: 416
- PDF下载量: 37
- 被引次数: 0