

Influential Factors for Importance of Indoor Space Elements
-
摘要:
随着经济技术的快速发展,室内空间越来越复杂,对室内位置服务的需求日益增多,作为位置服务信息载体的室内地图产品也越来越多. 但是,目前大多室内地图呈现的内容多于用户需求. 针对这一问题,提出了基于用户需求的室内空间要素重要性影响因素的探究方法. 该方法利用空间认知理论进行不同室内空间的多组心理行为试验,分析组内、组间试验结果,提取用户需求共性,得到室内空间要素的影响因素;通过验证试验最终确定室内空间要素重要性影响因素为:要素知名度、空间位置分布、要素独特性和相对规模.
Abstract:With the rapid development of economy and technology, indoor spaces are becoming more and more complex, and the demand for indoor location services is increasing. There are more and more indoor map products as information carriers of location services. However, most of the indoor maps present more contents than what users need. In response to this problem, a method is proposed to explore the factors affecting the importance of indoor space elements on the basis of user needs. This method uses spatial cognition theory to conduct multiple psychological behavior experiments in different indoor spaces, analyzes the results of experiments within and between groups, extracts the generality of user needs, and obtains influential factors for indoor space elements. By experiment verification, the influencing factors are determined: element visibility, spatial location distribution, element uniqueness and relative scale.
-
Key words:
- factor analysis /
- element classification /
- spatial cognition /
- indoor space
-
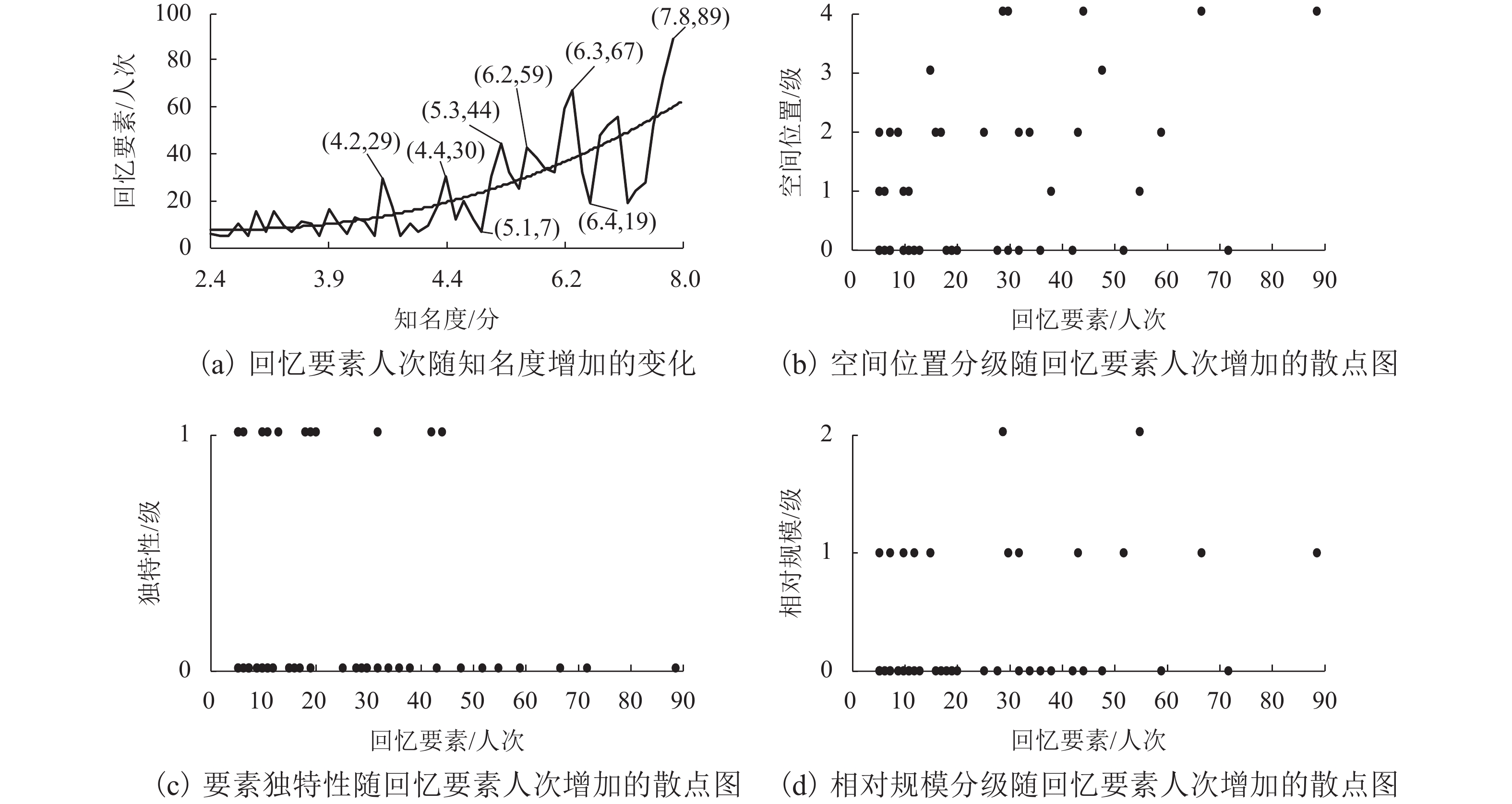
图 2 室内空间要素影响因素随回忆要素人次变化的分析
Figure 2. Analysis of influential factors for indoor space elements varying with number of participants recalling elements
表 1 各组测试分数方差齐性检验描述信息
Table 1. Descriptive information for homogeneity of variance test of scores for each group
分 分组 案例/
个平均值 标准
偏差均值的95%置
信区间最小值 最大值 下限 上限 1 20 58.40 17.479 50.22 66.58 36 96 2 20 58.00 17.290 49.91 66.09 32 92 3 20 58.20 17.240 50.13 66.27 32 92 4 20 58.40 17.285 50.31 66.49 32 92 总计 80 58.25 16.993 54.47 62.03 32 92  下载: 导出CSV
下载: 导出CSV
表 2 各组测试分数方差齐性检验结果
Table 2. Test results of homogeneity of variance test of scores for each group
检验量 Levene统计量 df1 df2 P 基于平均值 0.004 3 76 0.999 基于中位数 0.002 3 76 0.999 基于剪除后平均值 0.002 3 76 0.999
下载: 导出CSV
表 3 被试回忆要素总量统计表
Table 3. Statistics of total recalling elements
分组 万达广场 分组 协信星光 要素/个 回忆要素/
人次要素/个 回忆要素/
人次1 37/42 216/240 3 45/47 270/273 2 37/46 224/246 4 45/53 264/285 注:表中数据“xx/xx”表示“共同/总计”.
下载: 导出CSV
表 4 万达广场被试回忆要素信息统计
Table 4. Information statistics of participants recalling elements in Wanda Plaza
第1组 第2组 要素名称 回忆要素/人次 要素名称 回忆要素/人次 要素名称 回忆要素/人次 要素名称 回忆要素/人次 麦当劳 17 puma 8 麦当劳 16 大队长火锅 9 Nike 14 大队长火锅 7 Nike 15 安踏 8 肯德基 14 良品铺子 7 肯德基 13 屈臣氏 7 李宁 13 名创优品 7 Adidas 12 DQ 7 星巴克 12 莱得快 7 李宁 11 安踏kids 7 梁山鸡 11 Apple 7 梁山鸡 10 热风 6 泰熙家 9 屈臣氏 6 星巴克 10 小CK 6 安踏 9 美宝莲 6 北京烤鸭 9 泰熙家 6 Adidas 9 热风 6 puma 9
下载: 导出CSV
表 5 协信星光广场被试回忆要素信息统计
Table 5. Information statistics of participants recalling elements in Starlight Place
第3组 第4组 要素名称 回忆要素/人次 要素名称 回忆要素/人次 要素名称 回忆要素/人次 要素名称 回忆要素/人次 Adidas 18 一点点 8 Adidas 16 章鱼烧 8 Nike 15 匡威 8 Nike 15 Puma 8 Puma 13 Westlink 7 无印良品 13 匡威 7 优衣库 13 缤果鲜茶 7 优衣库 12 Fila 7 ANTA 12 莱得快 7 一点点 12 书亦烧仙草 7 无印良品 11 周黑鸭 7 屈臣氏 11 热风 7 New balance 11 Kappa 6 New balance 10 一只酸奶牛 6 Apple 10 屈臣氏 6 Vans 10 快乐柠檬 6 Fila 10 华为 6 三福 9 莱得快 6 书亦烧仙草 9 Kappa 9 华为 6 Vans 9 Westlink 8 Apple 6 Keds 9 ANTA 8
下载: 导出CSV
表 6 协信星光广场被试回忆要素及影响因素信息统计
Table 6. Information statistics of participants recalling elements and influential factors in Starlight Place
分级 要素名称 回忆
要素/人次知名度/
分空间
位置/级独特性/
级相对
规模/级分级 要素名称 回忆
要素/人次知名度/
分空间
位置/级独特性/
级相对
规模/级1 Adidas 89 7.8 4 0 1 3 UR 15 3.6 3 0 1 Nike 72 7.6 0 0 0 全棉时代 15 3.7 3 0 1 屈臣氏 67 6.3 4 0 1 4 章鱼烧 13 4.1 0 1 0 无印良品 59 6.2 2 0 0 三福 12 4.5 0 0 1 优衣库 55 7 1 0 2 Kappa 12 5.1 0 0 0 ANTA 52 7.5 0 0 1 Boy 11 4.1 0 1 0 2 New balance 48 6.6 3 0 0 耍家猪脚 11 4 0 0 0 一点点 44 5.3 4 1 0 斯凯奇 11 3.8 1 0 0 Puma 43 5.7 2 0 1 意尔康 10 4.3 0 0 1 书亦烧仙草 42 6.6 0 1 0 八方渔蛋 10 3.4 0 1 0 Vans 38 5.8 1 0 0 Zippo 10 3.8 1 0 0 绝味 36 7.2 0 0 0 缤果鲜茶 9 4.4 2 0 0 匡威 34 6.1 2 0 0 Lee 9 3.7 2 0 0 一只酸奶牛 32 6.3 0 1 0 O.C.E 7 3.6 2 0 0 莱得快 32 5.5 2 0 1 ANTA kids 7 5.1 0 0 0 Fila 30 5.2 0 0 1 娇兰佳人 7 3.7 2 0 0 热风 30 4.4 4 0 1 红蜻蜓 7 4.3 0 0 1 Westlink 29 4.2 4 0 2 华润万家 6 4 1 0 0 Apple 28 7.2 0 0 0 单农 6 2.4 0 1 0 3 NBA 25 5.6 2 0 0 丑酥肉 5 3.3 0 1 0 Dickes 20 4.9 0 1 0 AK club 5 2.9 2 0 0 华为 19 7.1 0 0 0 钵钵鸡 5 4.2 0 1 0 周黑鸭 19 6.4 0 1 0 味子夫鸡柳 5 3.8 0 1 0 快乐柠檬 18 4.4 0 1 0 太平鸟 5 4.1 1 0 1 Keds 17 4.2 2 0 0 每味每客 5 3.5 1 1 0 GXG 16 3.9 2 0 0
下载: 导出CSV
表 7 要素影响因素分级量化
Table 7. Influential factor classification and quantification
要素影响因素 分级名称 分级/级 空间位置 通常 0 通道转角 1 多通道口 2 电梯口 3 出入口 4 相对规模 小规模 0 中规模 1 大规模 2 要素独特性 要素普通 0 要素独特 1
下载: 导出CSV
-
[1] 高俊. 地图学四面体:数字化时代地图学的诠释[J]. 测绘学报,2004,33(1): 6-11. doi: 10.3321/j.issn:1001-1595.2004.01.002GAO Jun. Cartographic tetrahedron:explanation of cartography in the digital era[J]. Acta Geodaetica et Cartographic Sinica, 2004, 33(1): 6-11. doi: 10.3321/j.issn:1001-1595.2004.01.002 [2] 陈毓芬. 地图符号的视觉变量[J]. 解放军测绘学院学报,1995,12(2): 145-148.CHEN Yufen. Visual variable for map symbol[J]. Journal of the Pla Institute of Surveying and Mapping, 1995, 12(2): 145-148. [3] 游天,周成虎,陈曦. 室内地图表示方法研究与实践[J]. 测绘科学技术学报,2014,31(6): 635-640. doi: 10.3969/j.issn.1673-6338.2014.06.018YOU Tian, ZHOU Chenghu, CHEN Xi. The research and practice of indoor map representation[J]. Journal of Geomatics Science and Technology, 2014, 31(6): 635-640. doi: 10.3969/j.issn.1673-6338.2014.06.018 [4] 方芳. 地图感性文化下的地图创意设计[J]. 测绘通报,2016(12): 120-123.FANG Fang. Maps creative design based on its sensual culture[J]. Bulletin of Surveying and Mapping, 2016(12): 120-123. [5] DARA-ABRAMS D. Learning and navigating built environments: How spatial cognition and behavior relate to environmental form[C]//HAQ S, HÖLSCHER C, TORGRUDE S. Movement and orientation in built environments: evaluating design rationale and user cognition. Bremen: Bremen University, 2008: 1-8. [6] RADOCZKY V. How to design a pedestrian navigation system for indoor and outdoor envrionments [M]//Location Based Services and Telecartography. Berlin: Springer Berlin Heidelberg, 2007: 301-316. [7] NOSSUM A S. Indoor tubes a novel design for maps[J]. Cartography and Geographic Information Science, 2011, 38(2): 192-200. doi: 10.1559/15230406382192 [8] HÖLSCHER C, BÜCHNER S, STRUBE G. Multi-floor buildings and human wayfinding cognition[J]. Behavioral and Brain Sciences, 2013, 36(5): 551-552. doi: 10.1017/S0140525X1300040X [9] 张兰,王光霞,袁田,等. 室内地图研究初探[J]. 测绘与空间地理信息,2013,36(9): 43-47. doi: 10.3969/j.issn.1672-5867.2013.09.012ZHANG Lan, WANG Guangxia, YUAN Tian, et al. Researchon indoor map[J]. Geomatics & Spatial Information Technology, 2013, 36(9): 43-47. doi: 10.3969/j.issn.1672-5867.2013.09.012 [10] 应申,朱利平,李霖,等. 基于室内空间特征的室内地图表达[J]. 导航定位学报,2015,3(4): 74-78,91.YING Shen, ZHU Liping, LI Lin, et al. Representation of indoor maps with the analysis of indoor space[J]. Journal of Navigation and Positioning, 2015, 3(4): 74-78,91. [11] 杨飞,江南,牛浩,等. 位置地图的空间认知研究[J]. 测绘工程,2017,26(5): 20-24.YANG Fei, JIANG Nan, NIU Hao, et al. Spatial cognition research on location map[J]. Engineering of Surveying and Mapping, 2017, 26(5): 20-24. [12] 陈达,苏亚龙,崔虎平. 室内移动地图信息传输与认知研究[J]. 测绘与空间地理信息,2018,41(7): 49-51,55. doi: 10.3969/j.issn.1672-5867.2018.07.012CHNE Da, SU Yalong, CUI Huping. Research on indoor mobile map information transmission and cognition[J]. Geomatics & Spatial Information Technology, 2018, 41(7): 49-51,55. doi: 10.3969/j.issn.1672-5867.2018.07.012 [13] 周转向. 基于空间认知的室内地图设计与表达研究[D]. 武汉: 武汉大学, 2017. [14] 李钰. 关于参考框架和心理旋转的空间认知研究[D]. 南宁: 广西师范学院, 2013. [15] 陈毓芬. 电子地图的空间认知研究[J]. 地理科学进展,2001,20(增刊1): 63-68. doi: 10.11820/dlkxjz.2001.s1.007CHEN Yufen. Spatial cognition research on electronic maps[J]. Progress in Geography, 2001, 20(S1): 63-68. doi: 10.11820/dlkxjz.2001.s1.007 [16] 张腊梅. 商业空间导视系统设计研究及其认知地图的构建[D]. 合肥: 合肥工业大学, 2014. [17] 吕伟婧. 基于用户行为与目标导向的交互设计研究[D]. 天津: 天津科技大学, 2016. [18] 周转向,何宗宜,苗静. 室内地图的设计与表达[J]. 测绘通报,2016(10): 39-44.ZHOU Zhuanxiang, HE Zongyi, MIAO Jing. Design and representation of indoor map[J]. Bulletin of Surveying and Mapping, 2016(10): 39-44. -

 下载:
下载:

 点击查看大图
点击查看大图
计量
- 文章访问数: 386
- HTML全文浏览量: 266
- PDF下载量: 7
- 被引次数: 0