摘要:
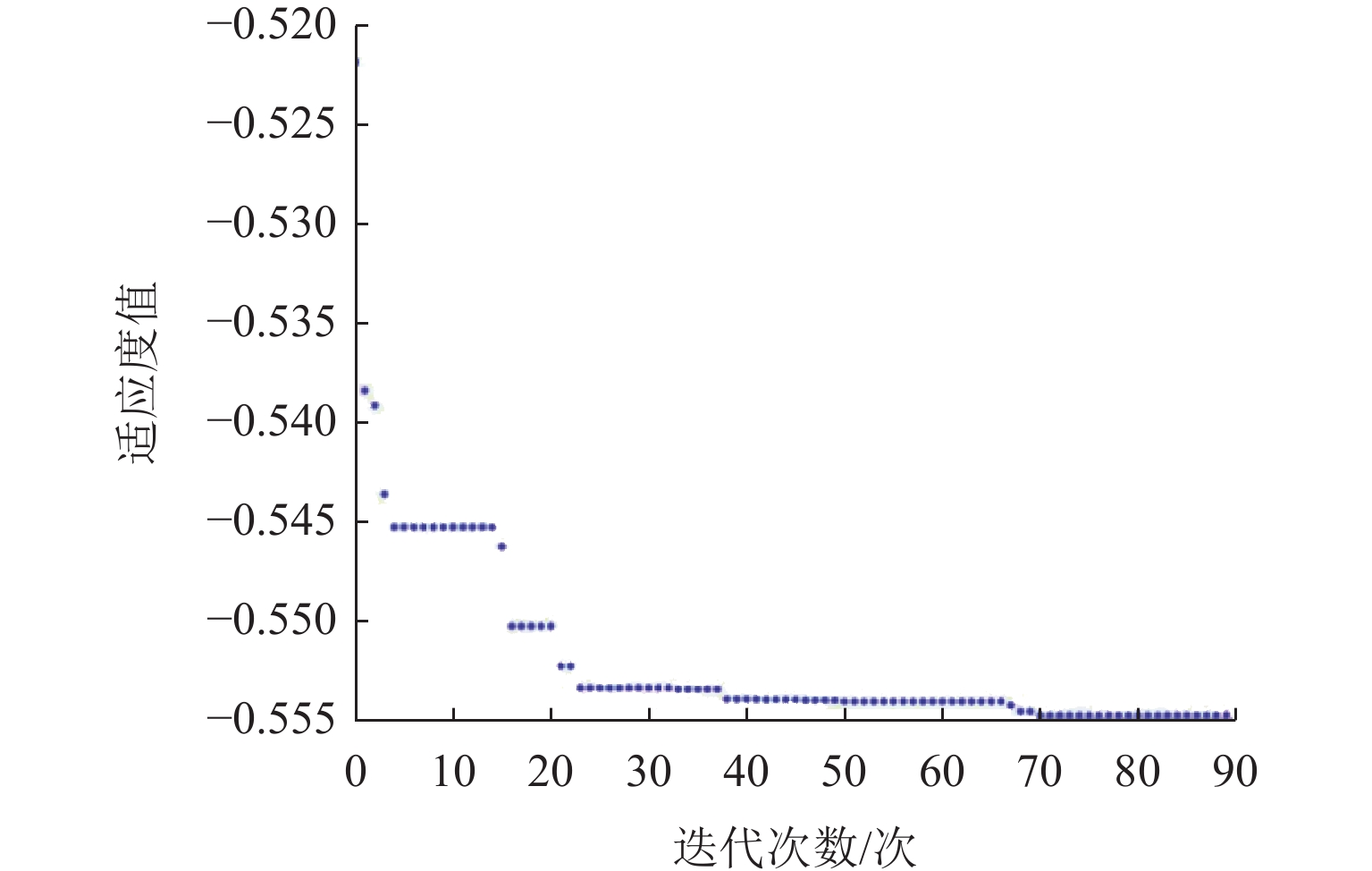
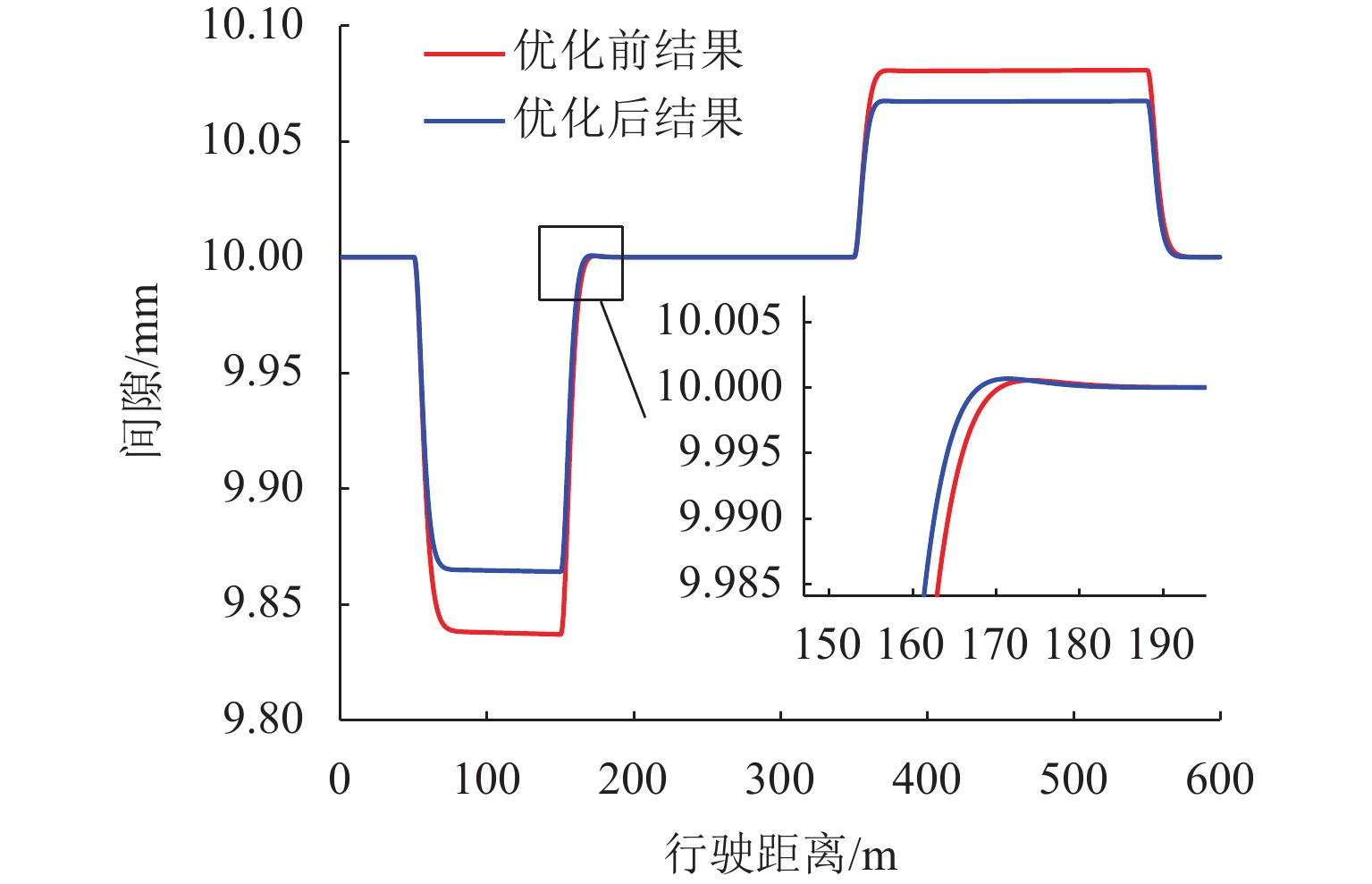
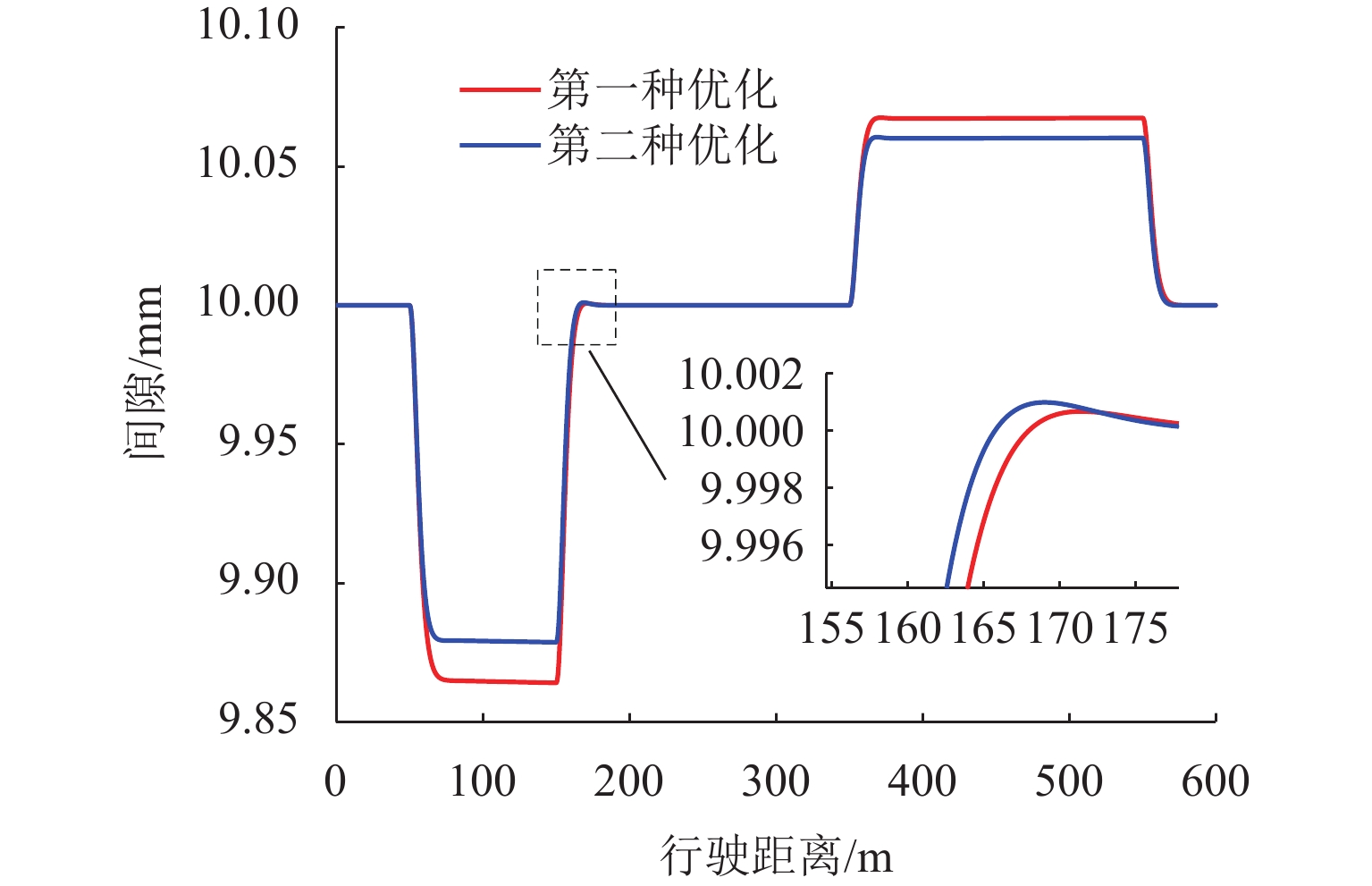
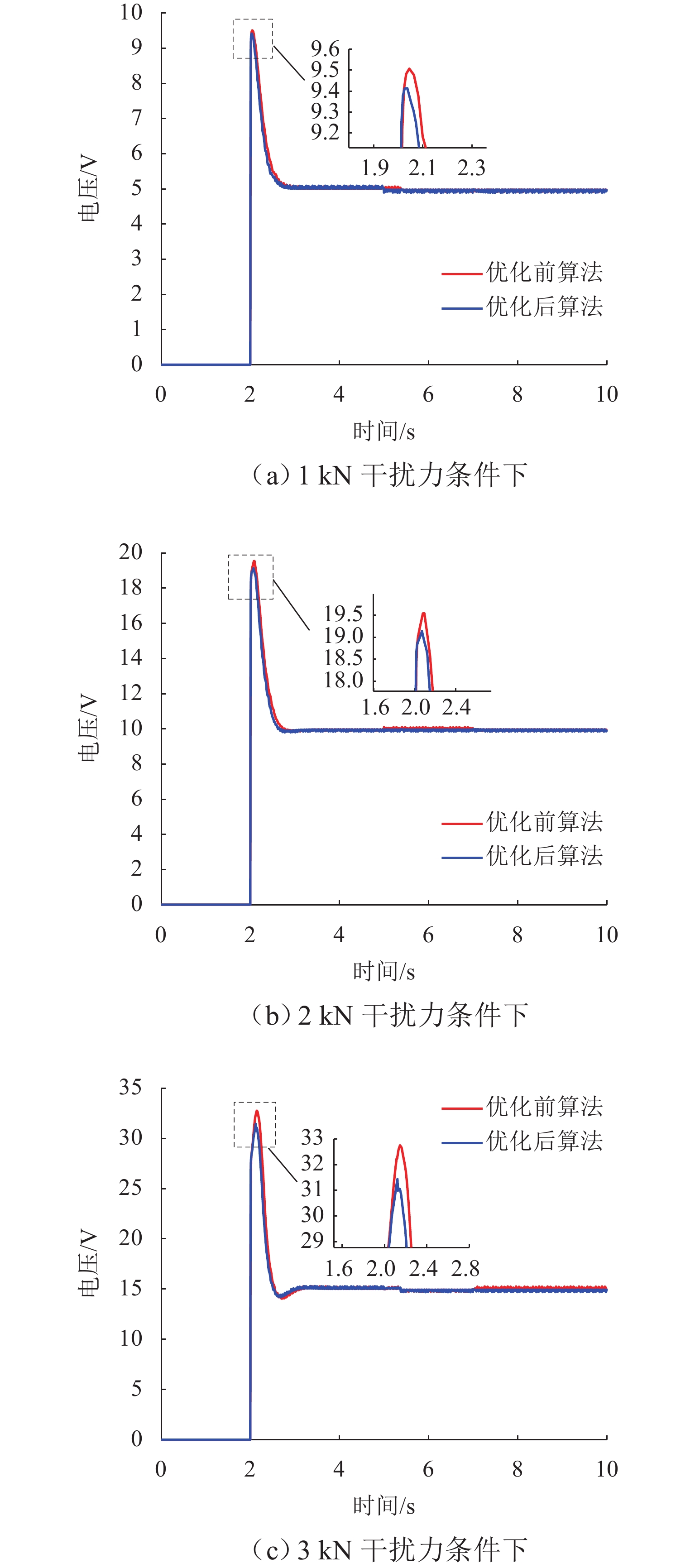
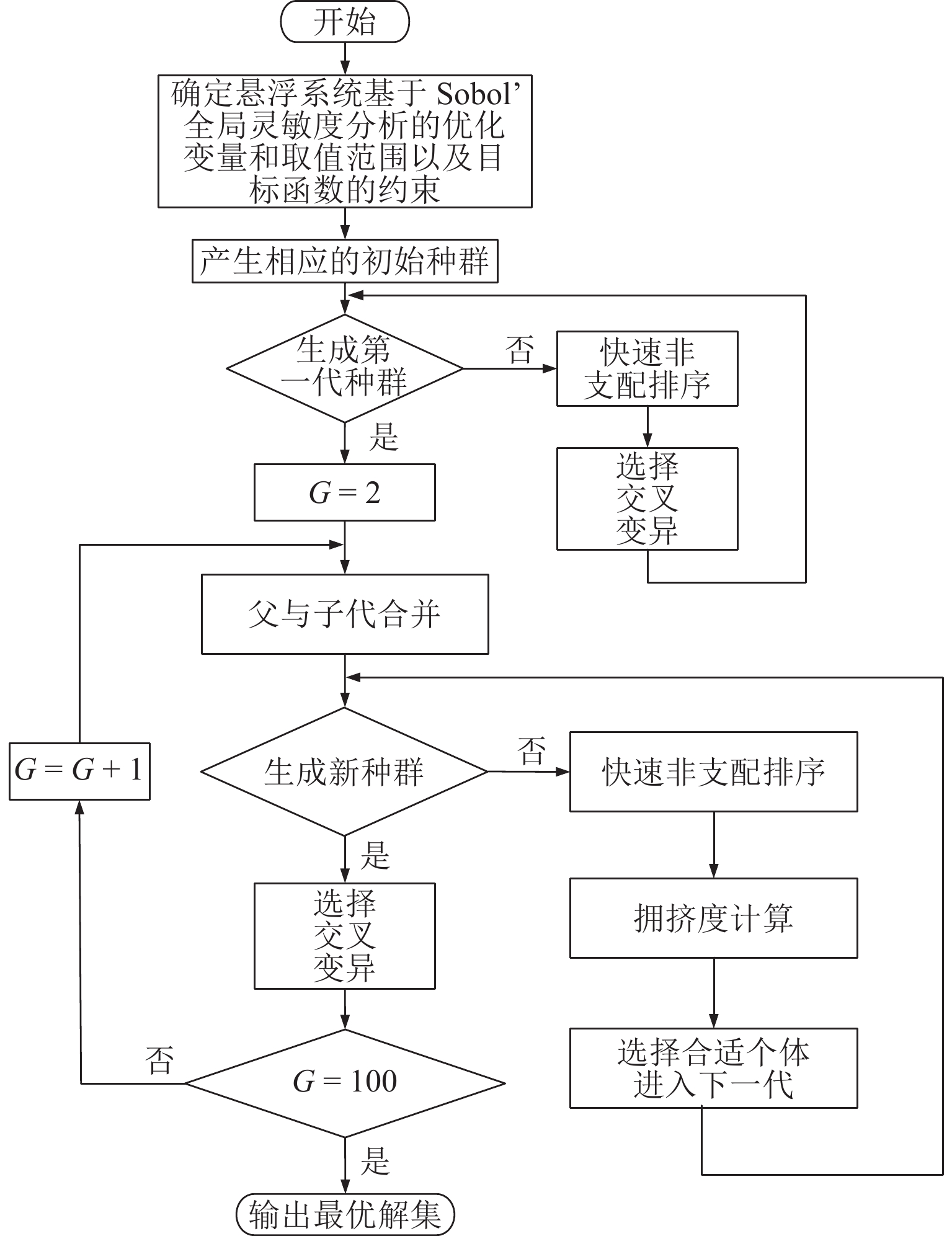
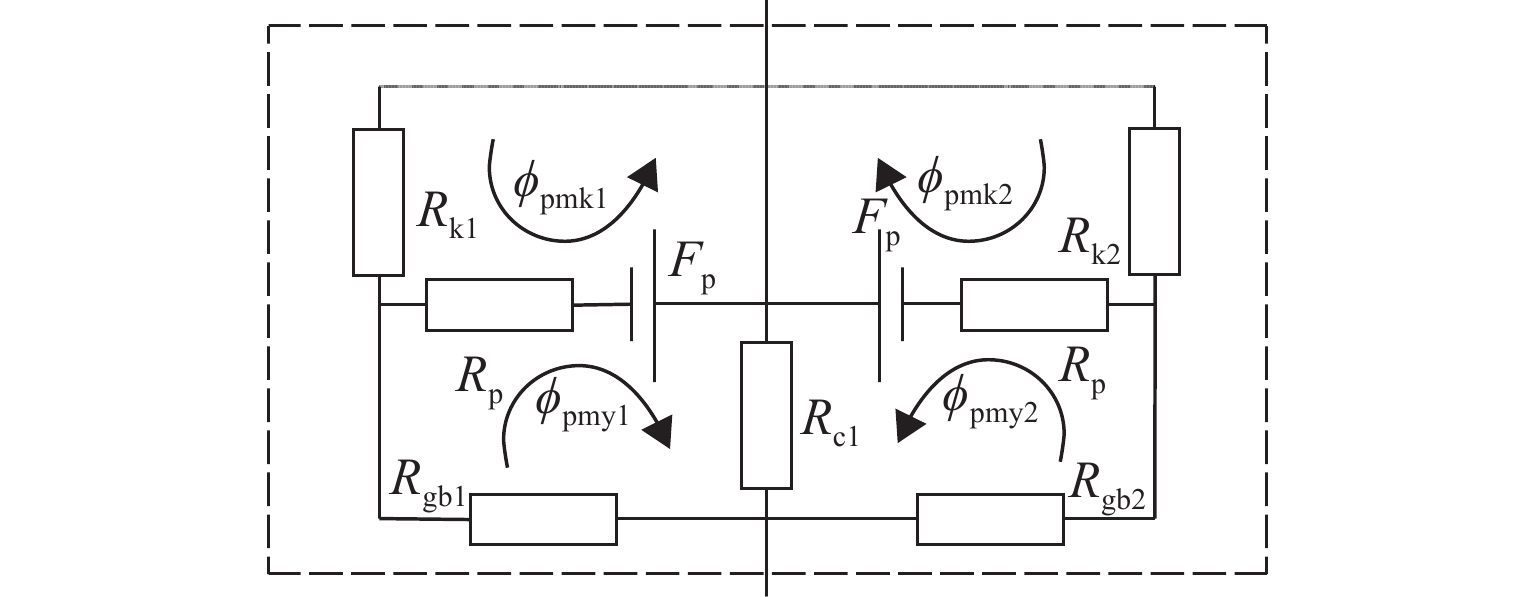
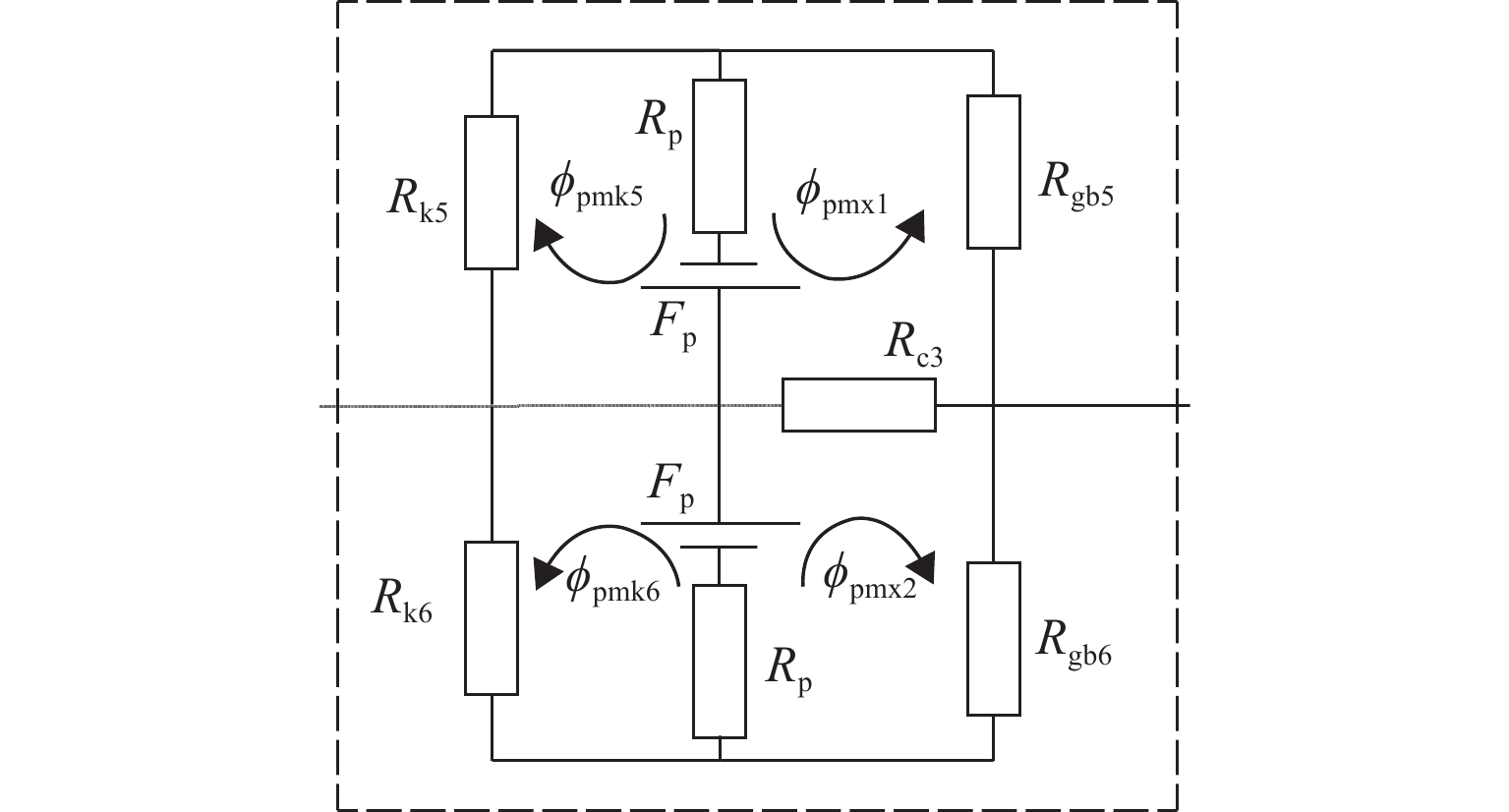
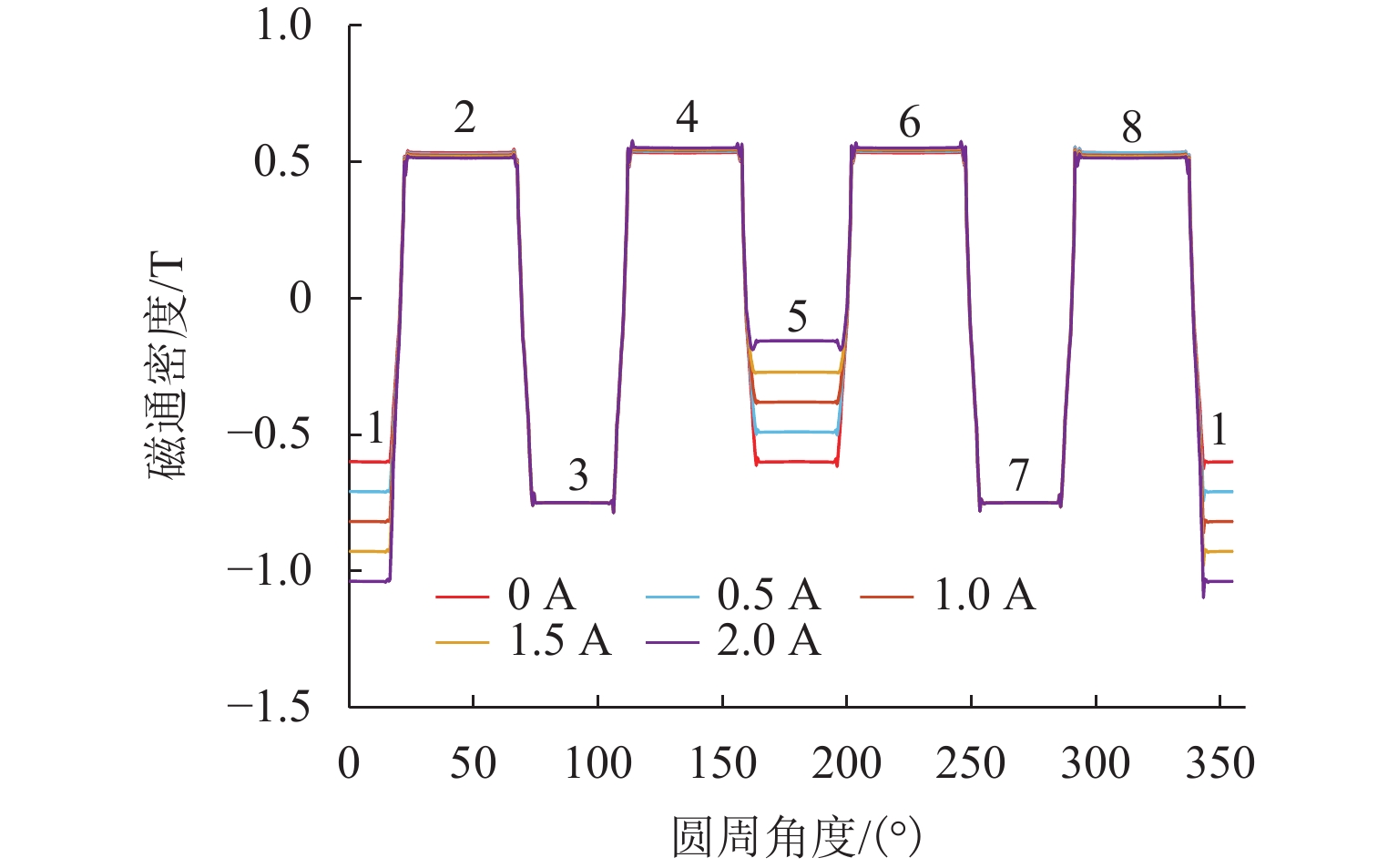
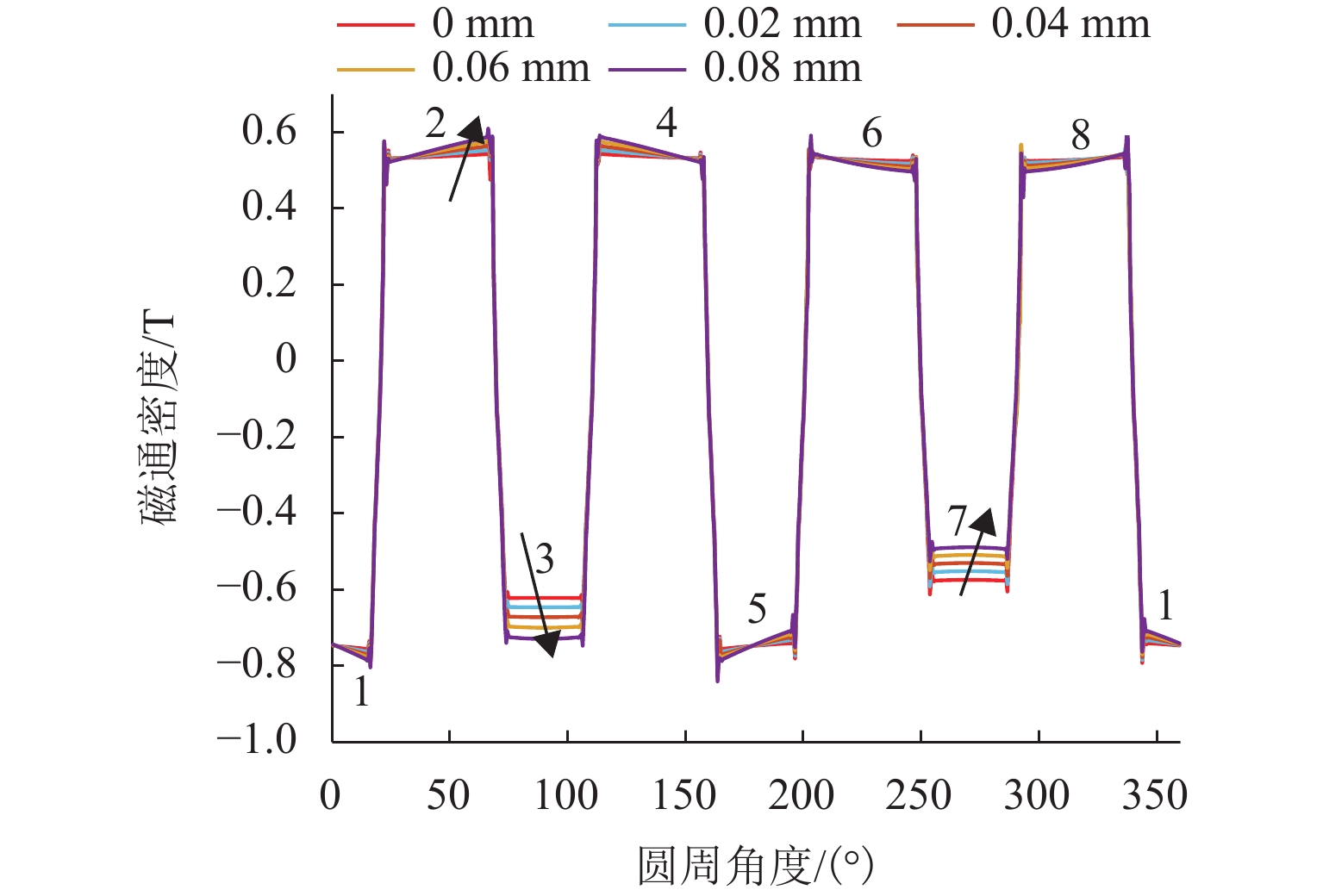
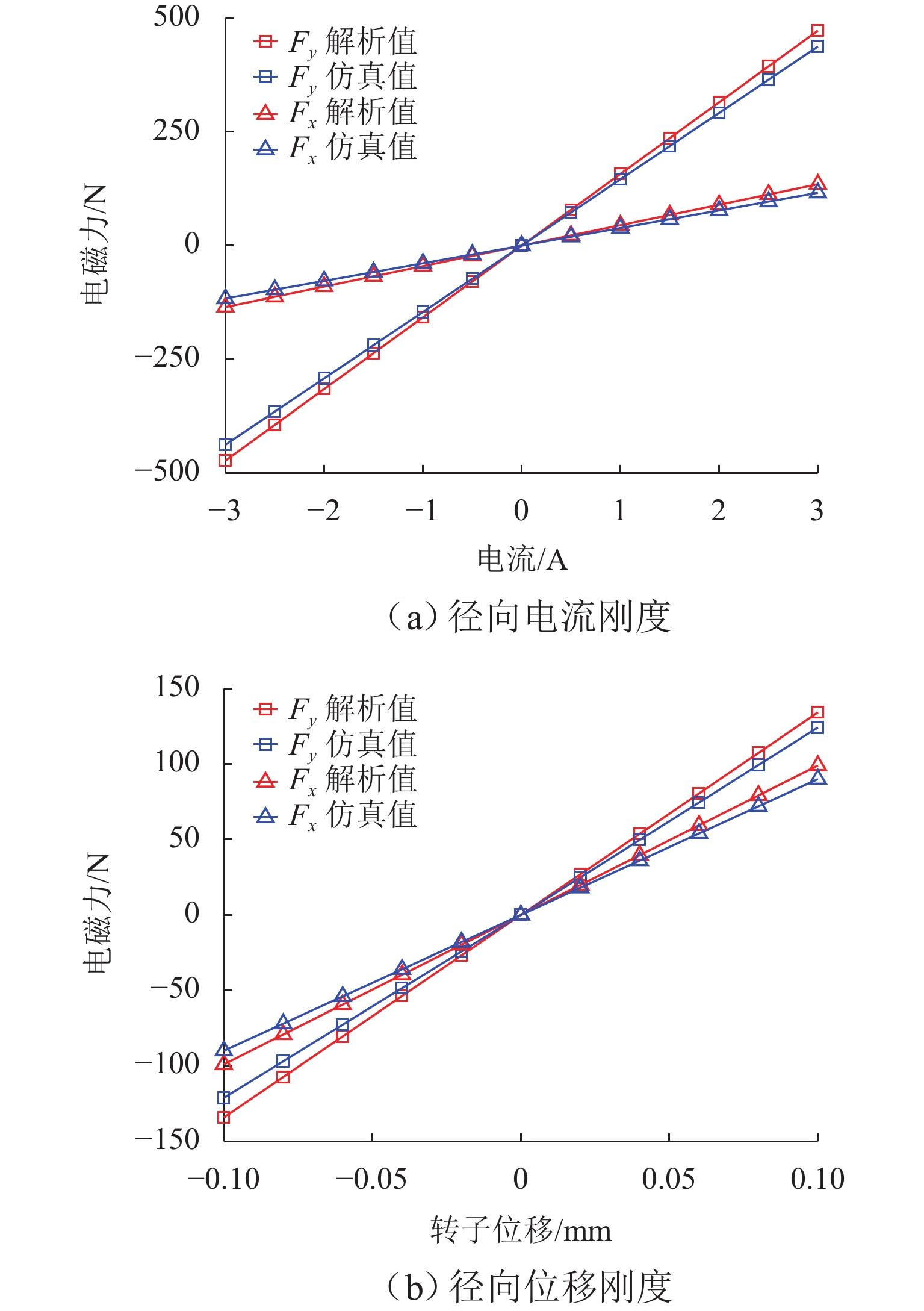
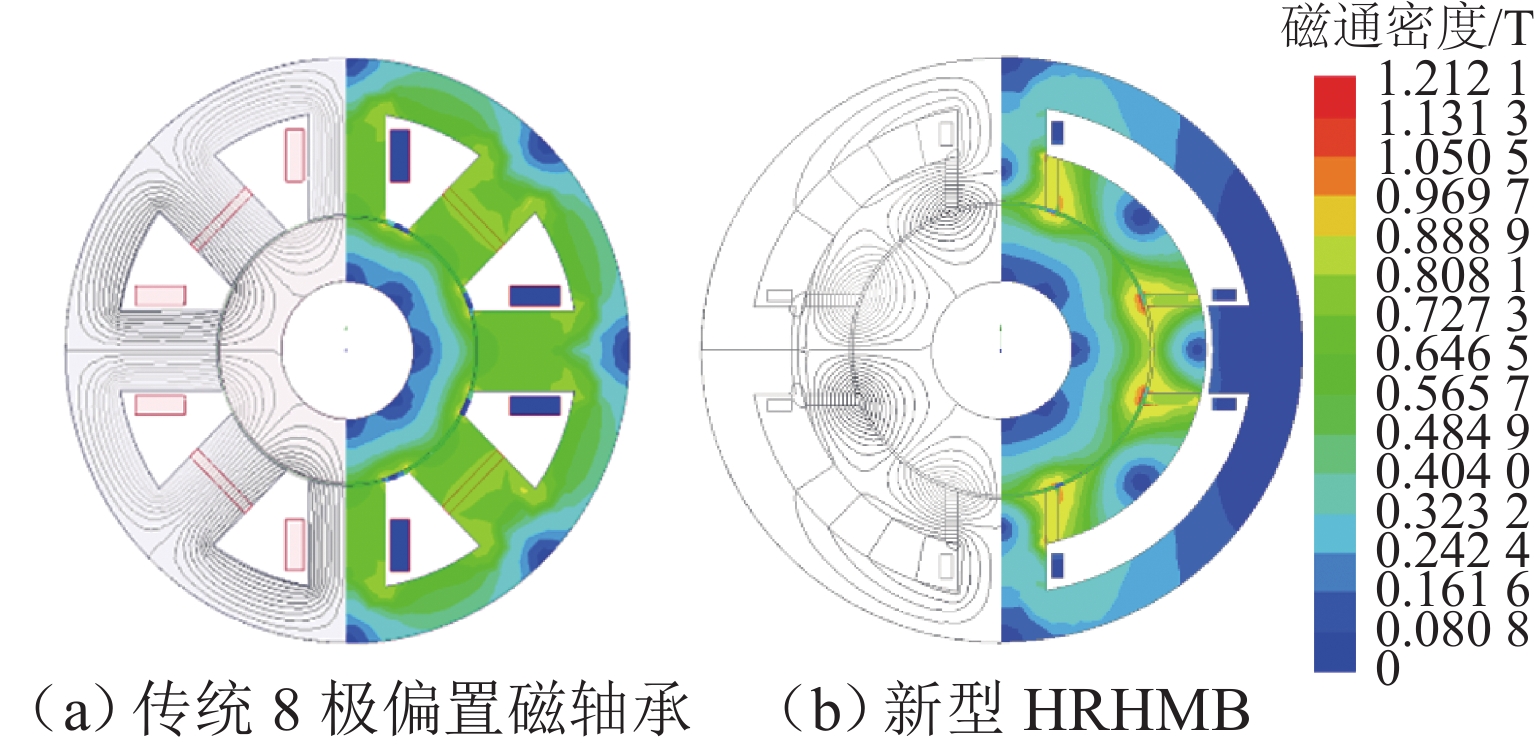
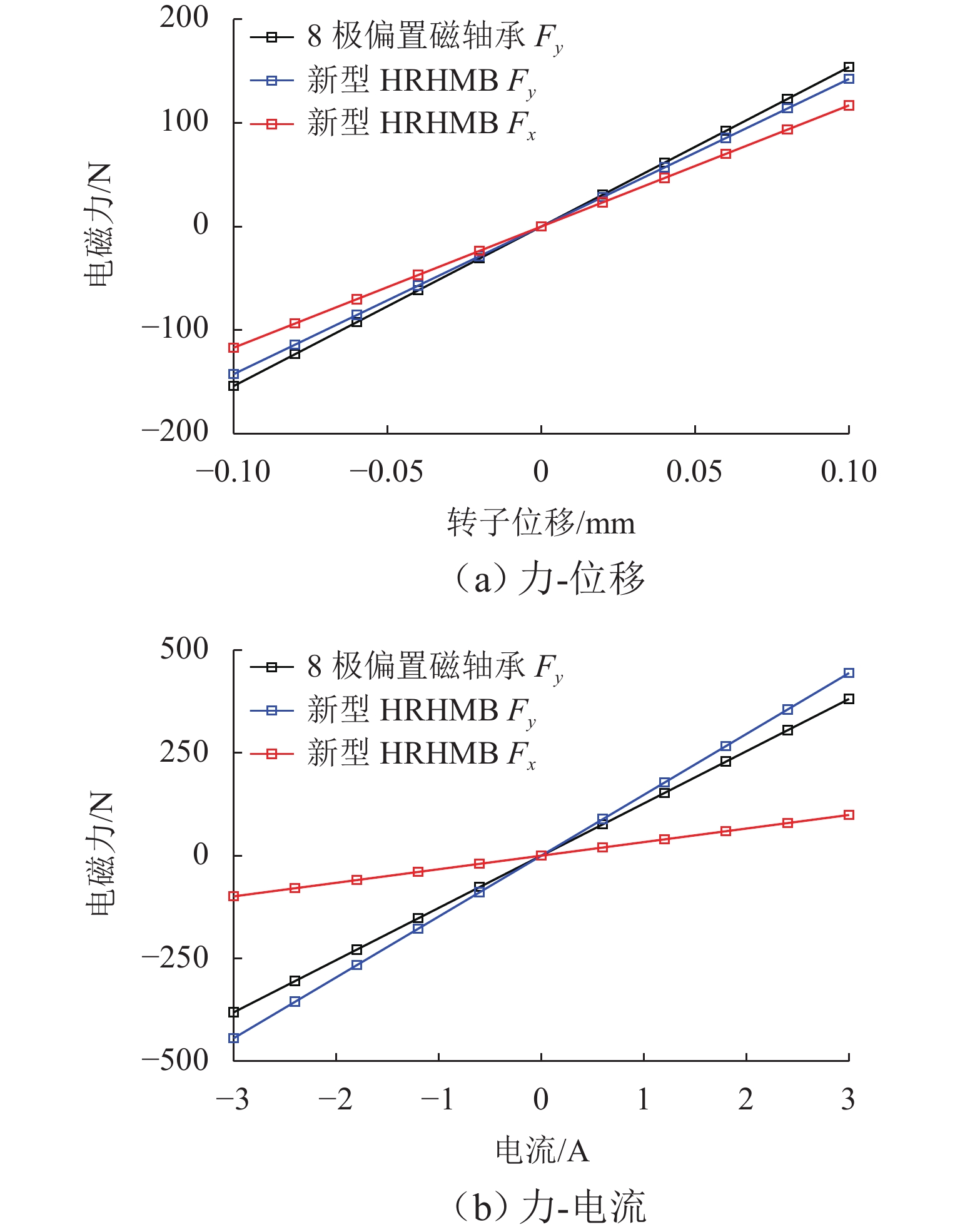
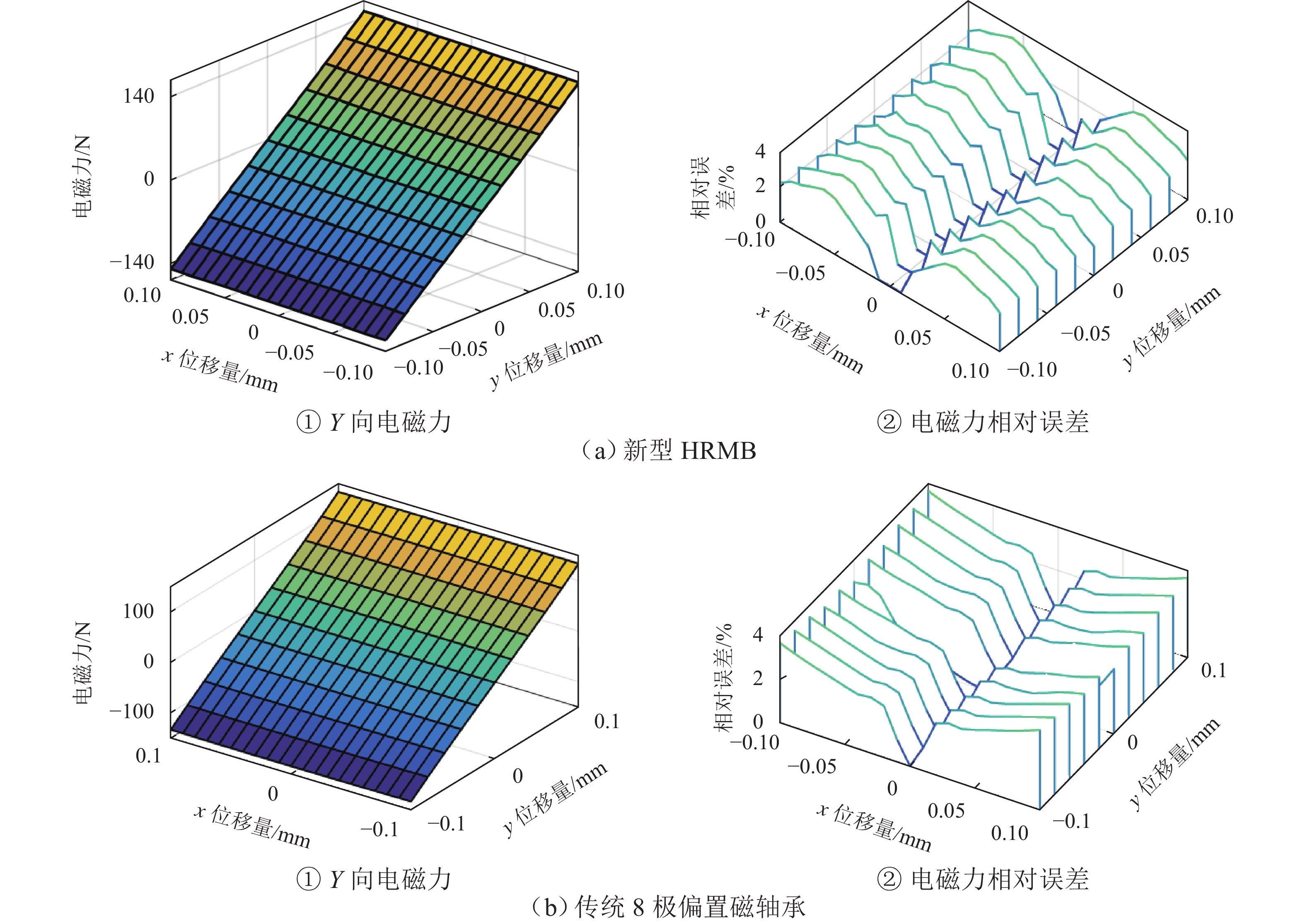
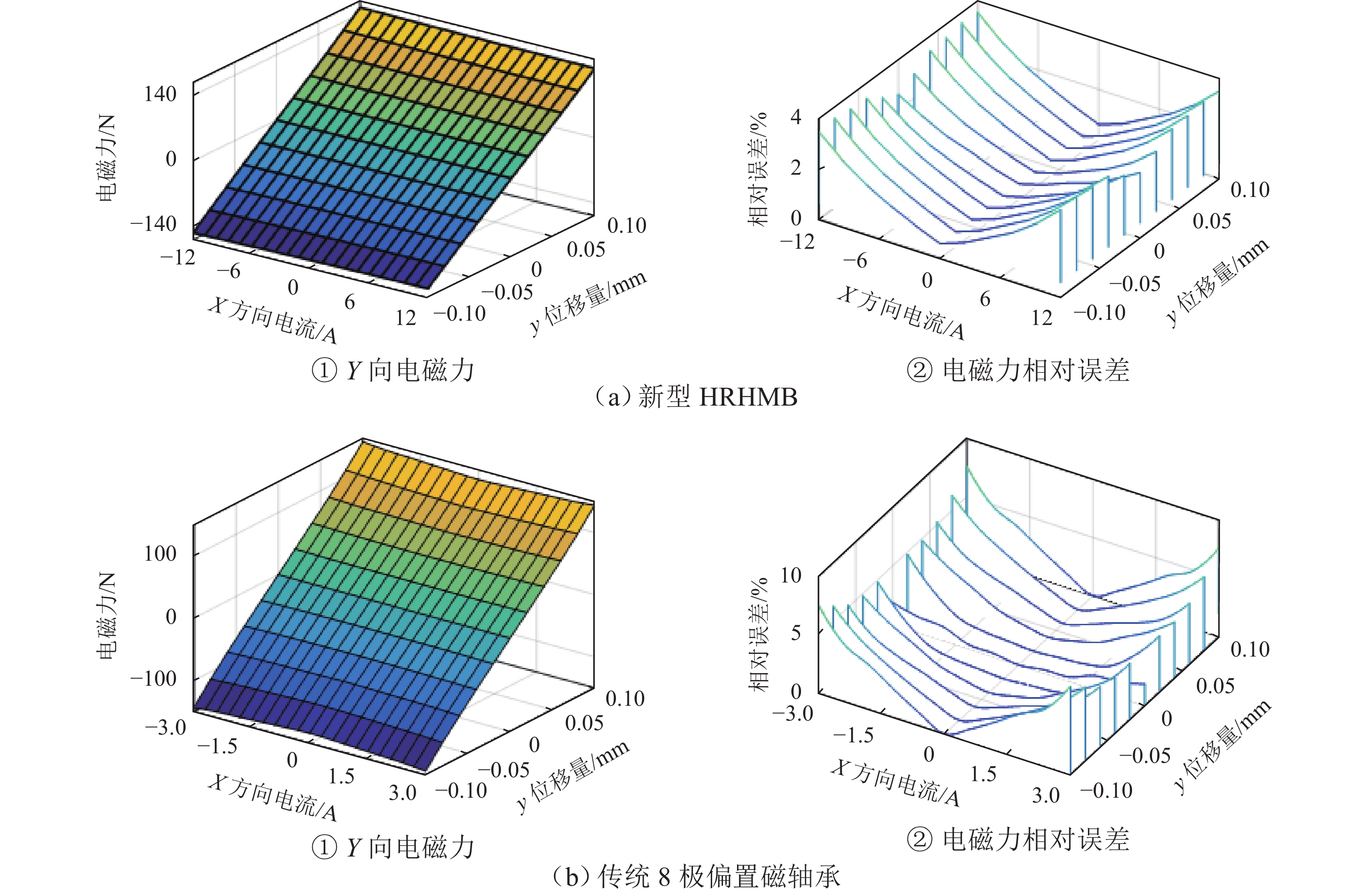
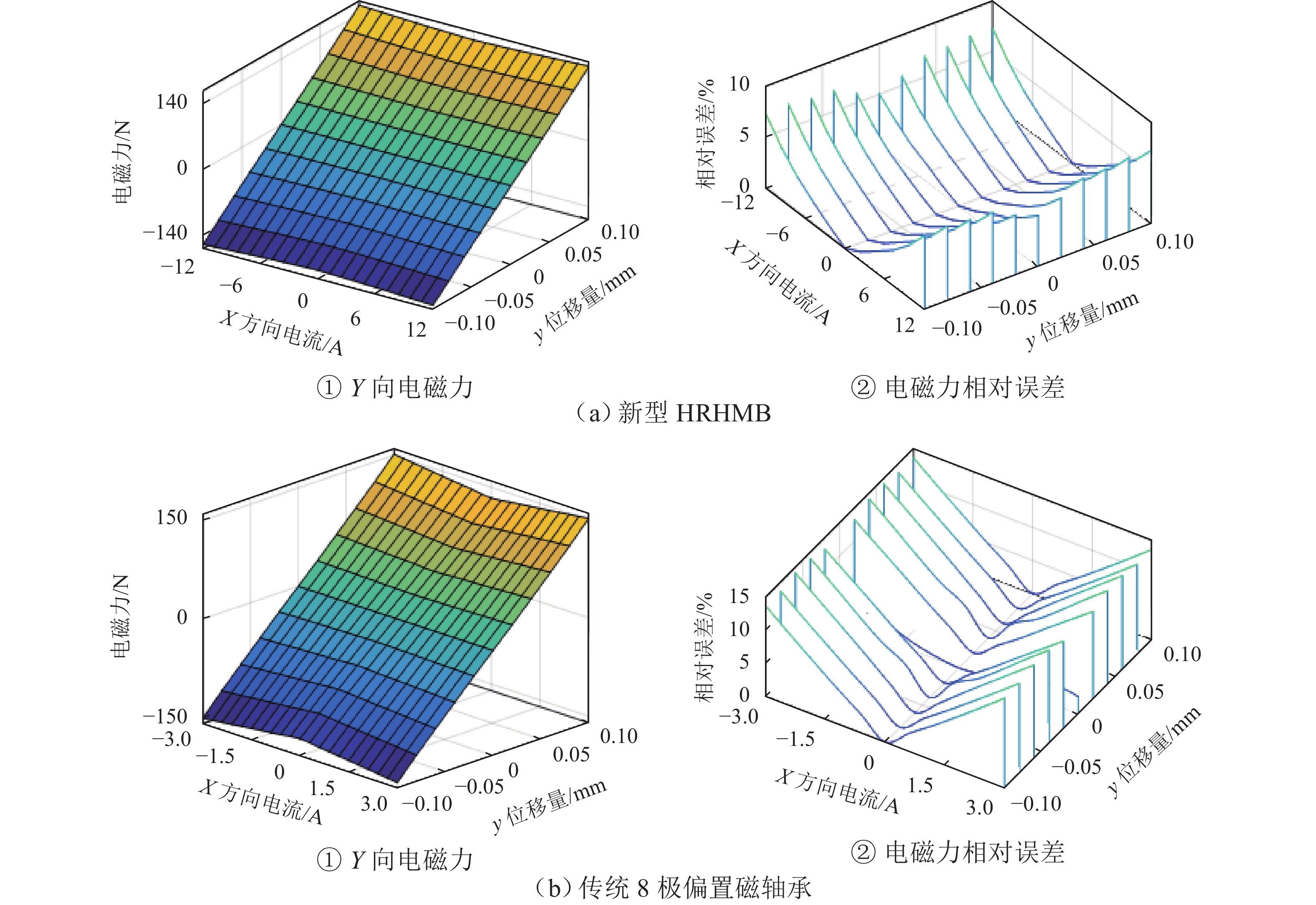
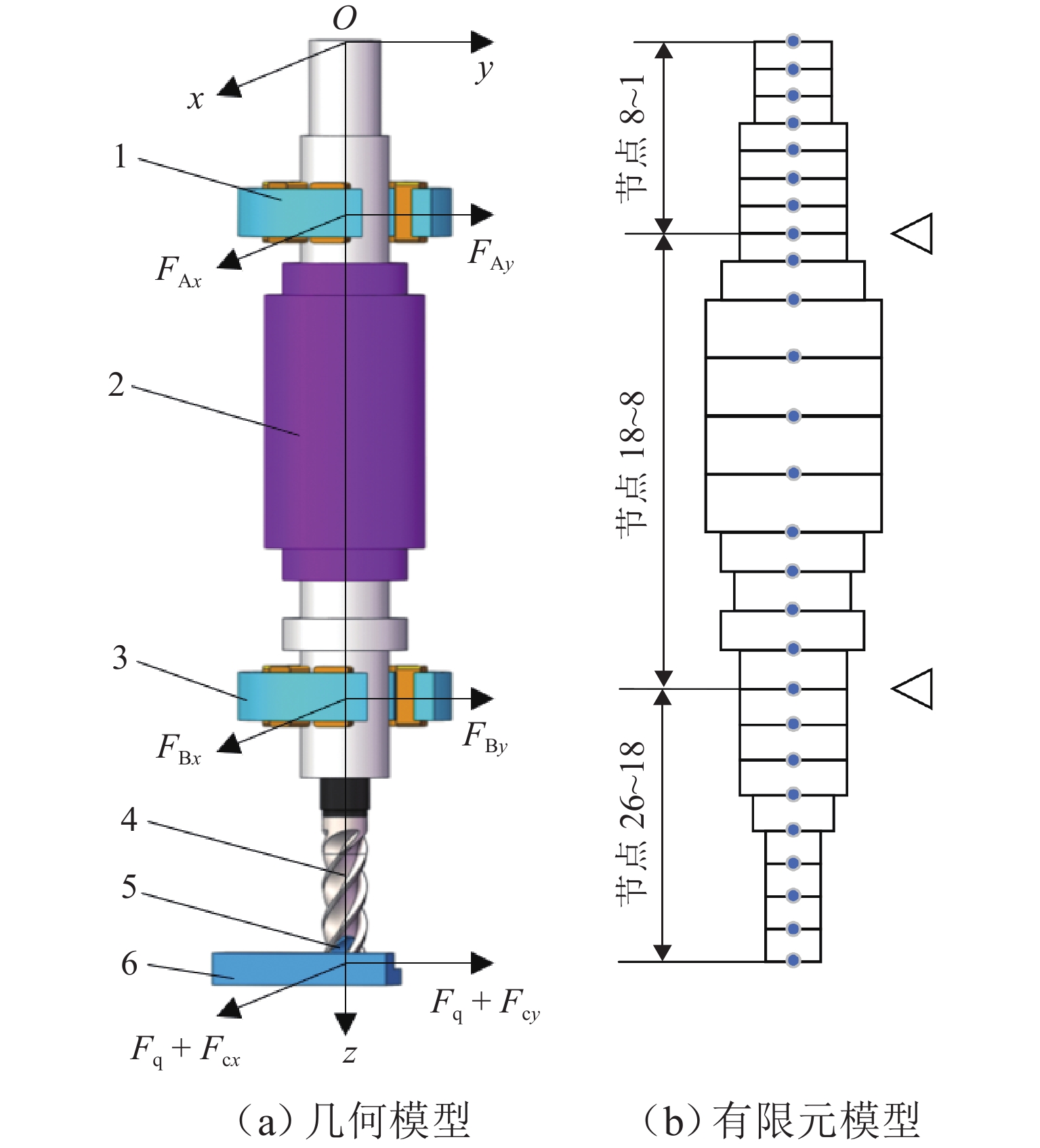
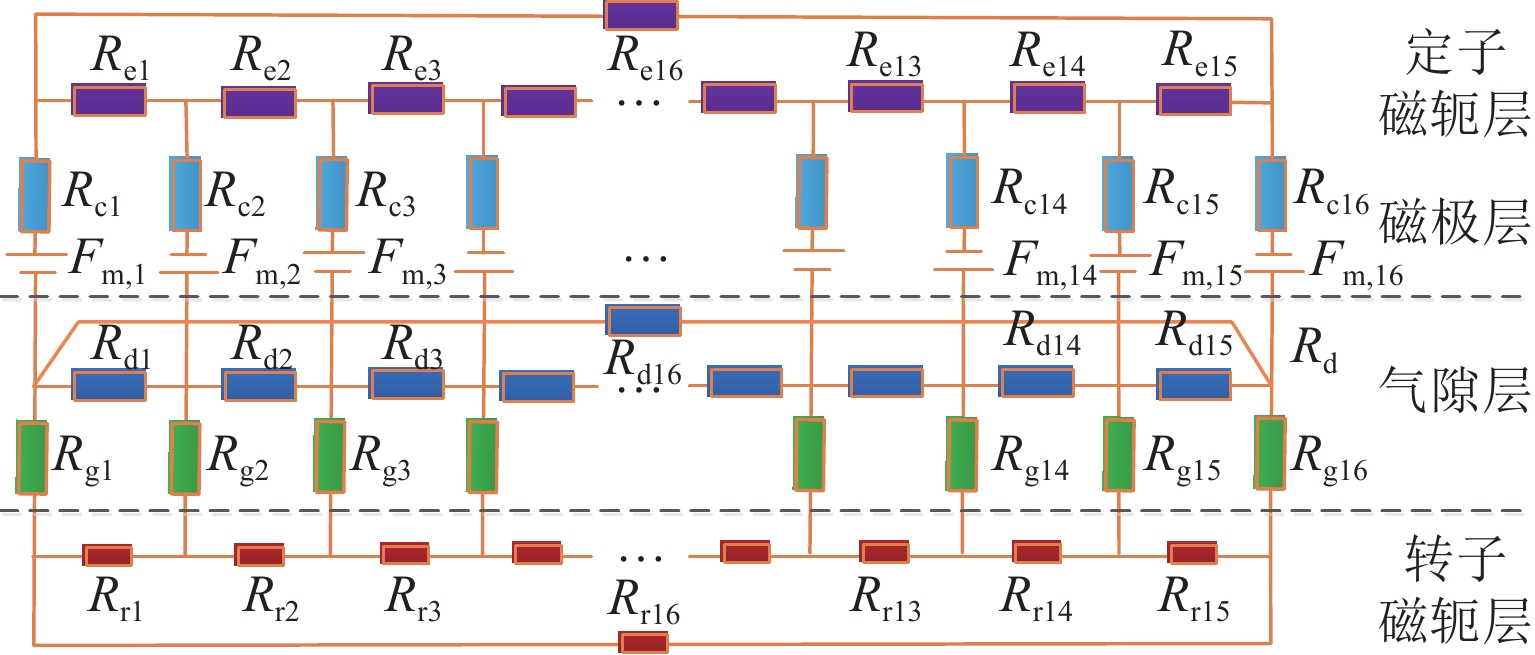
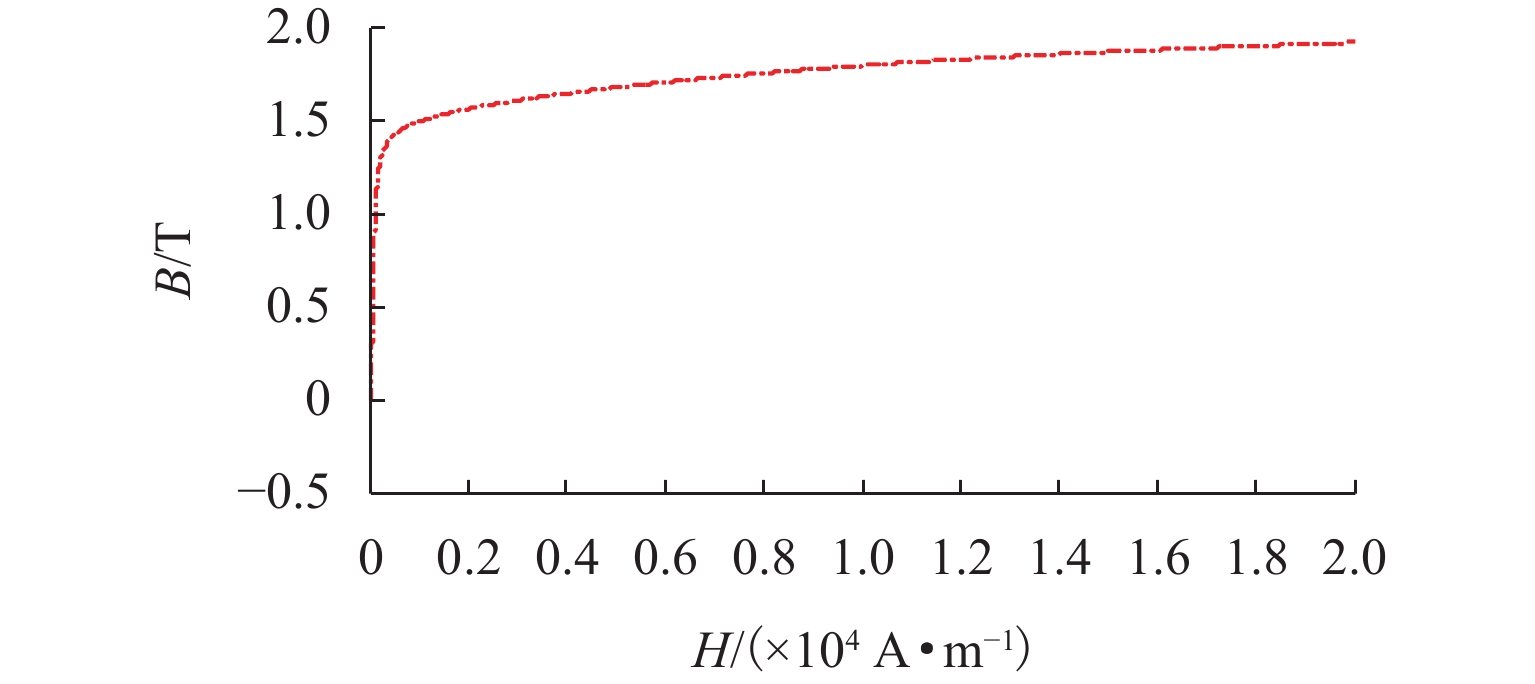
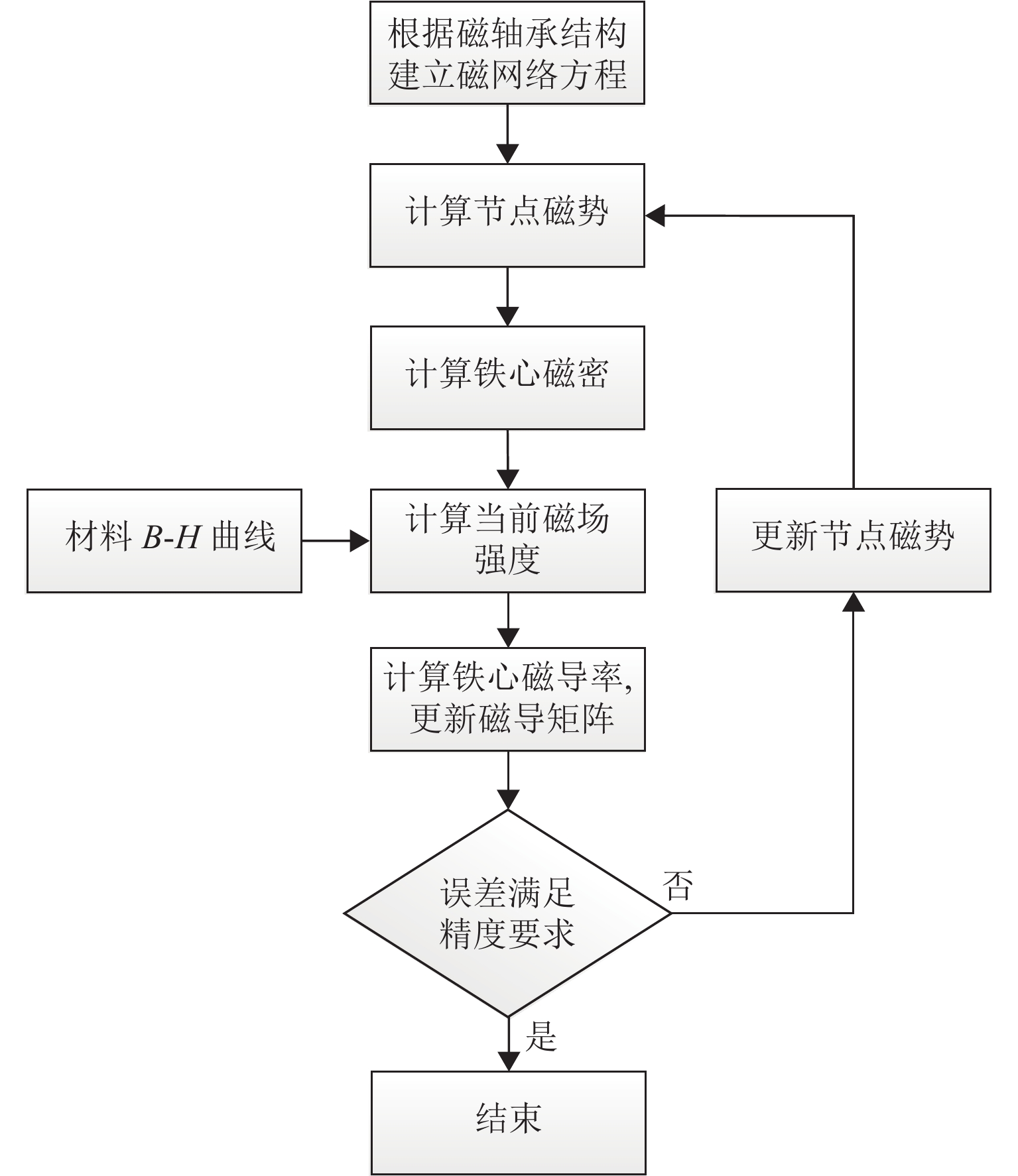
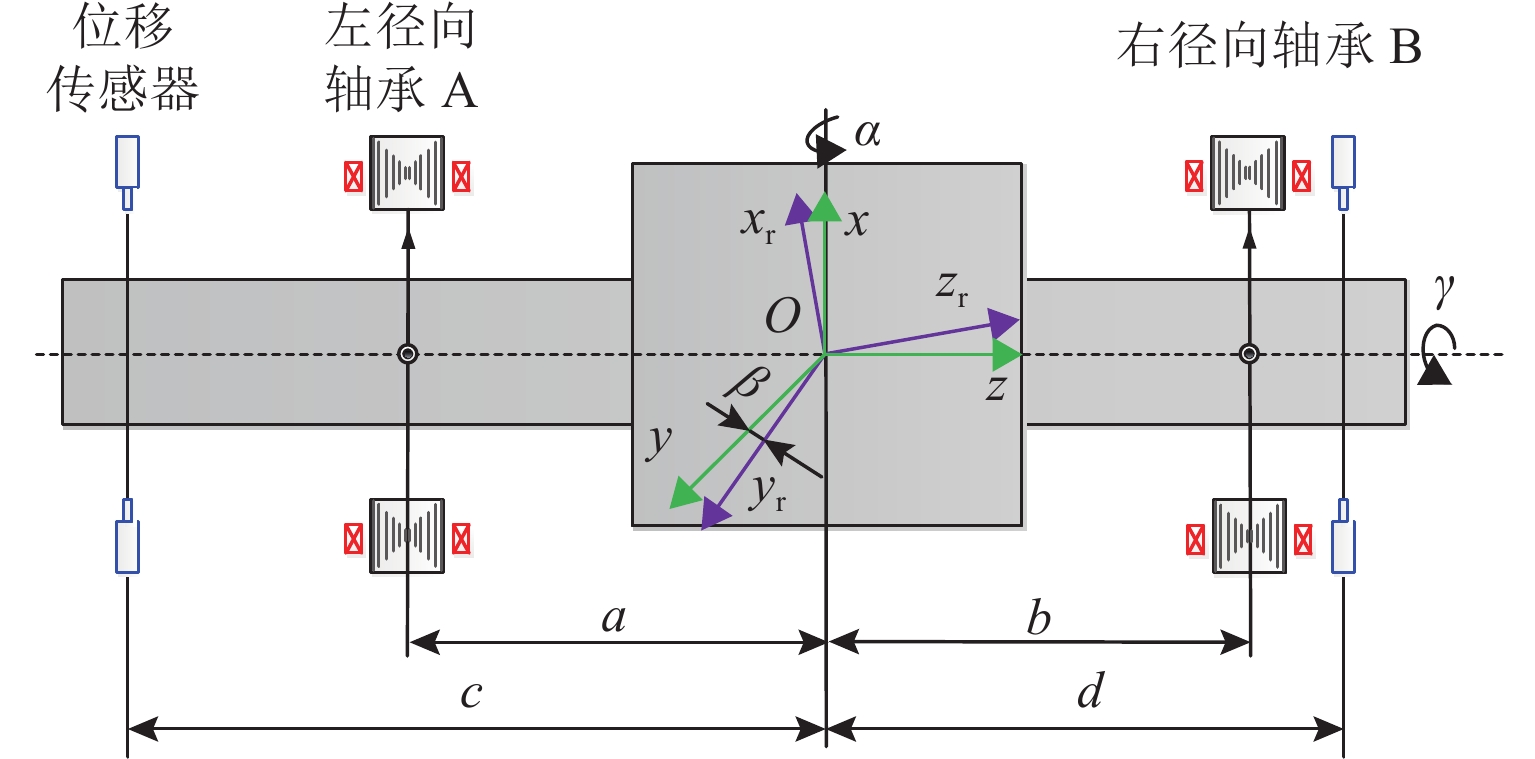
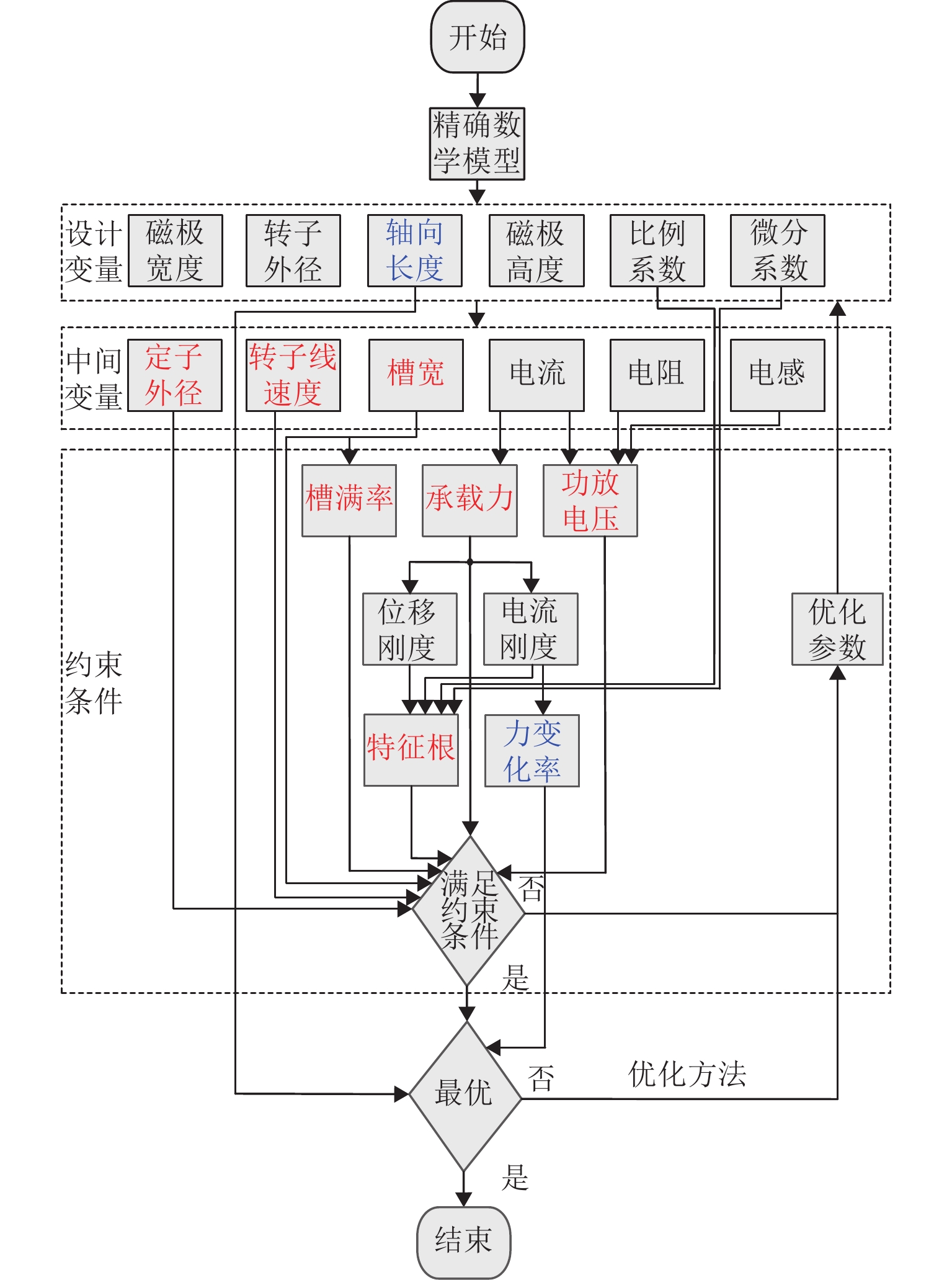
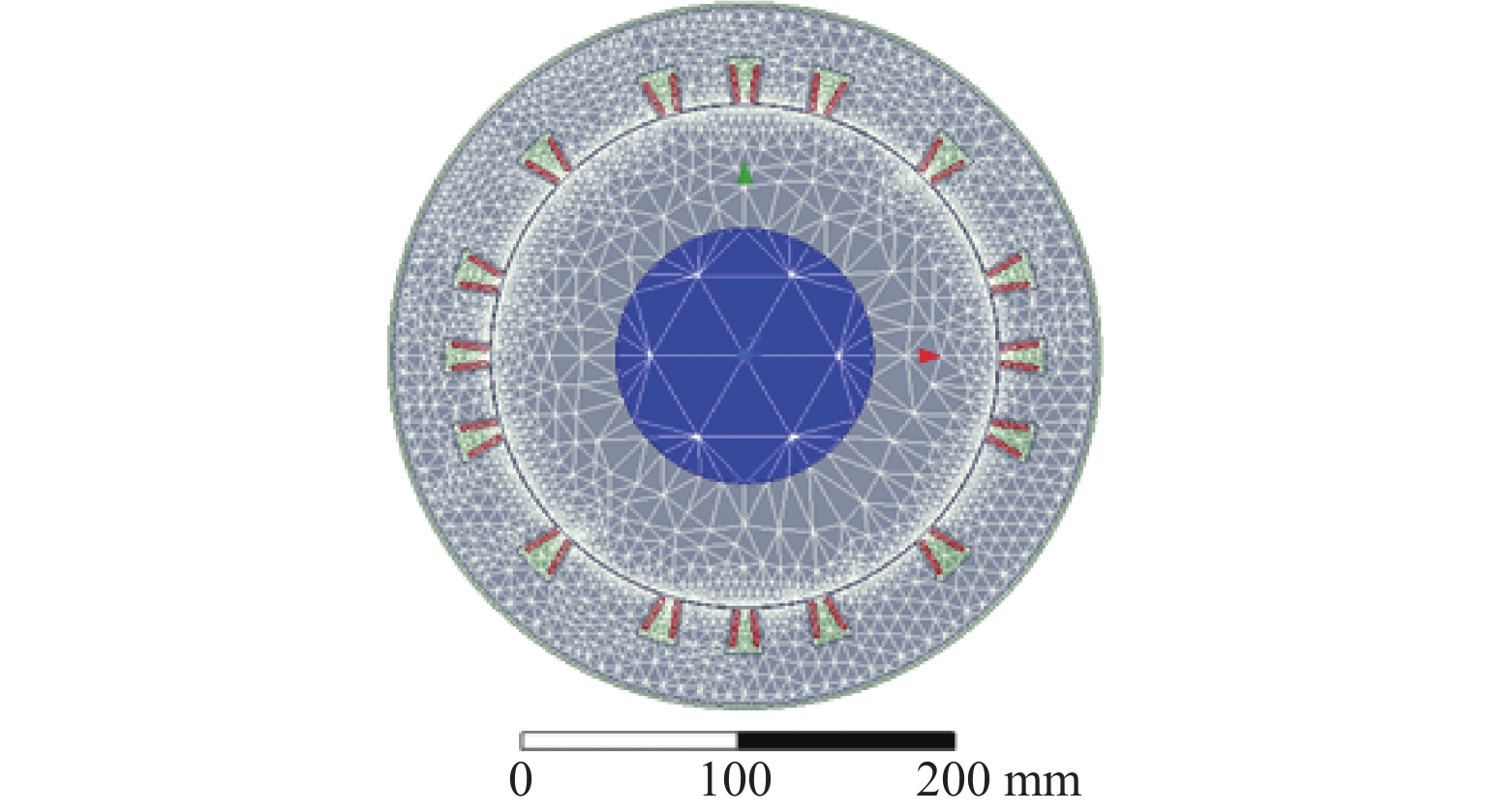
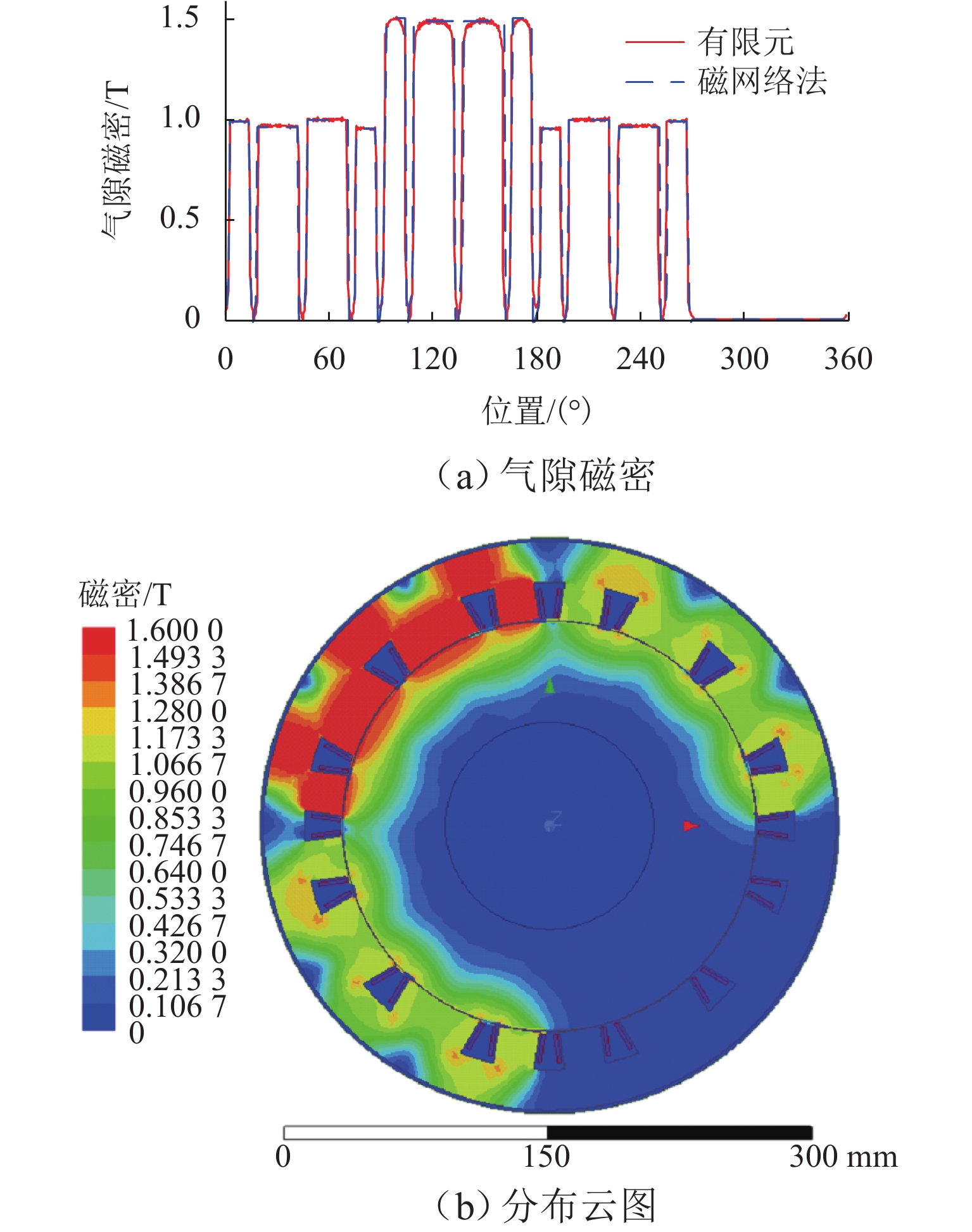
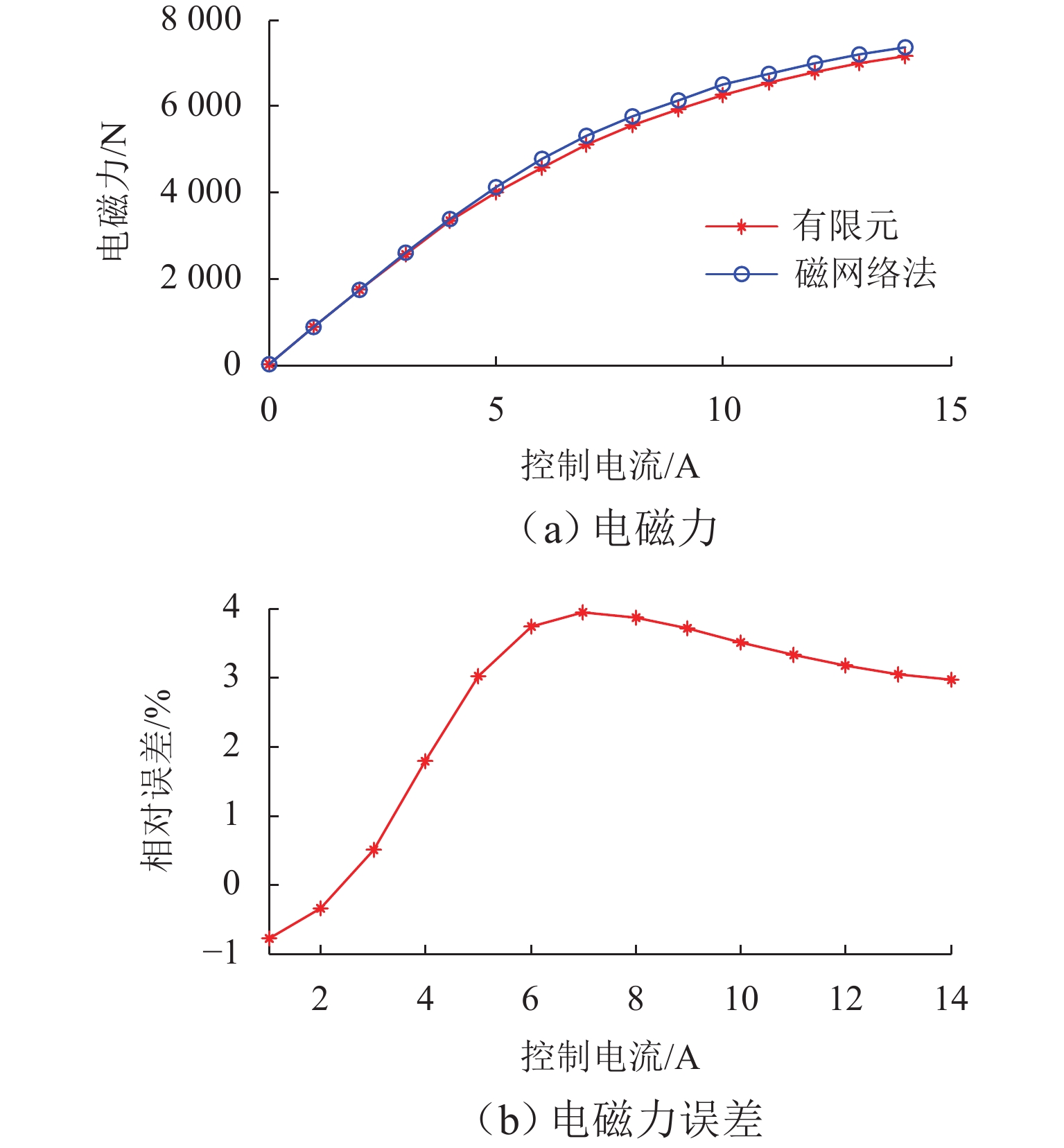
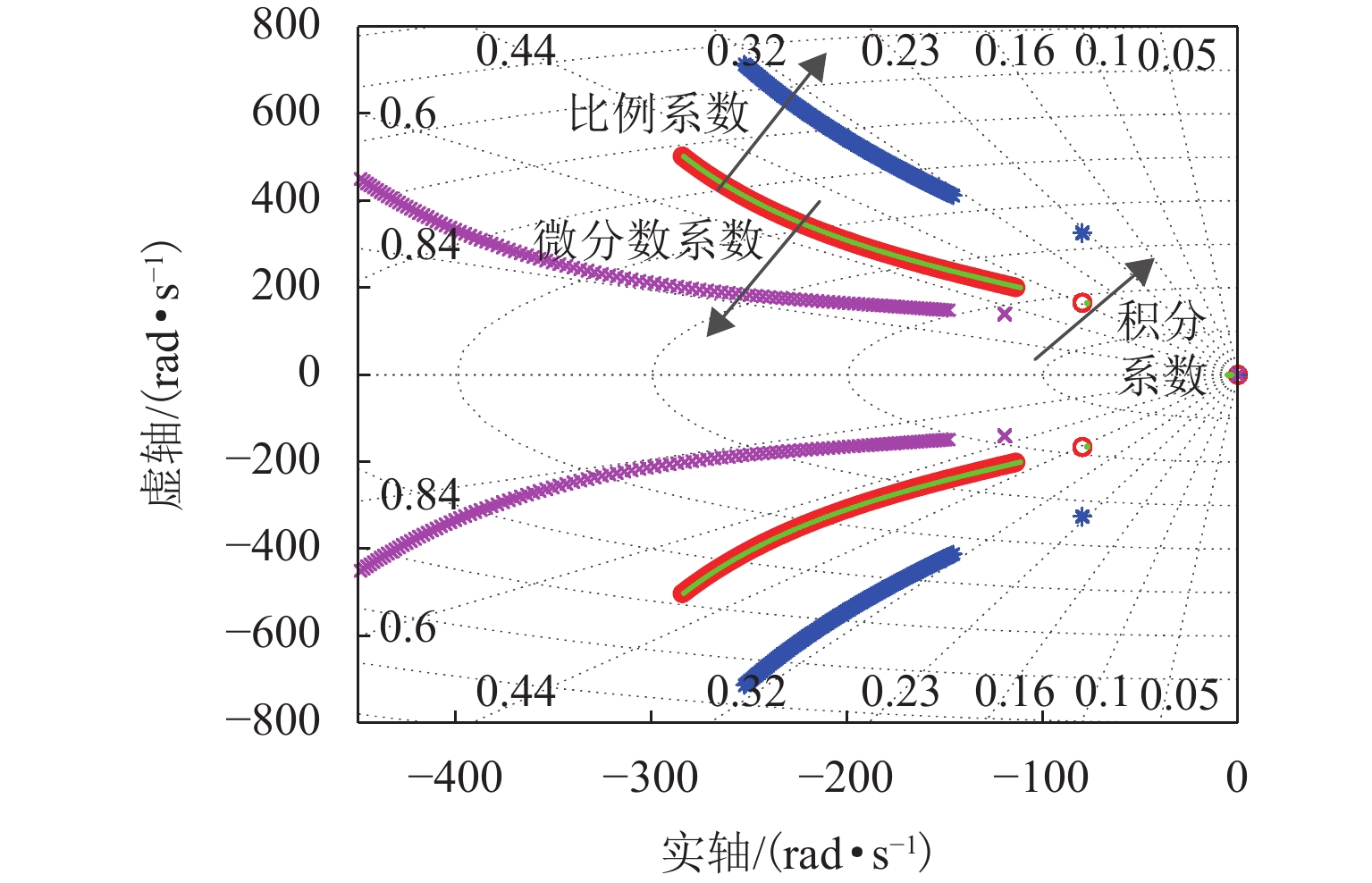
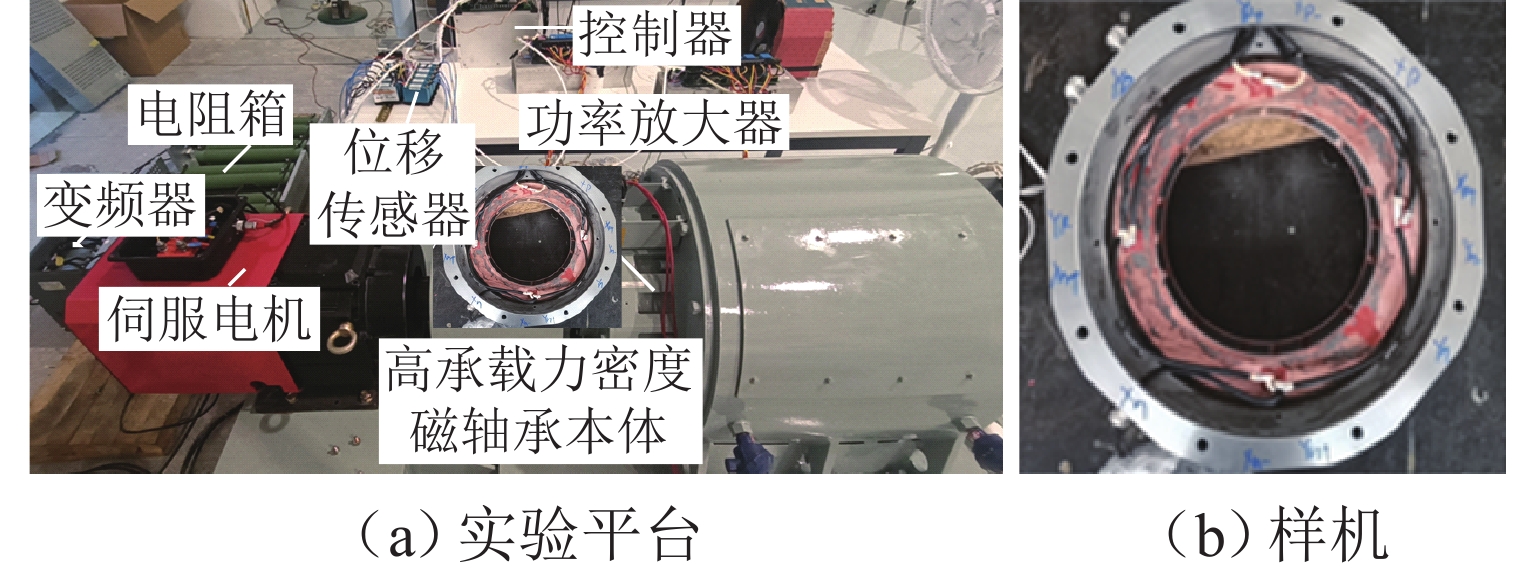
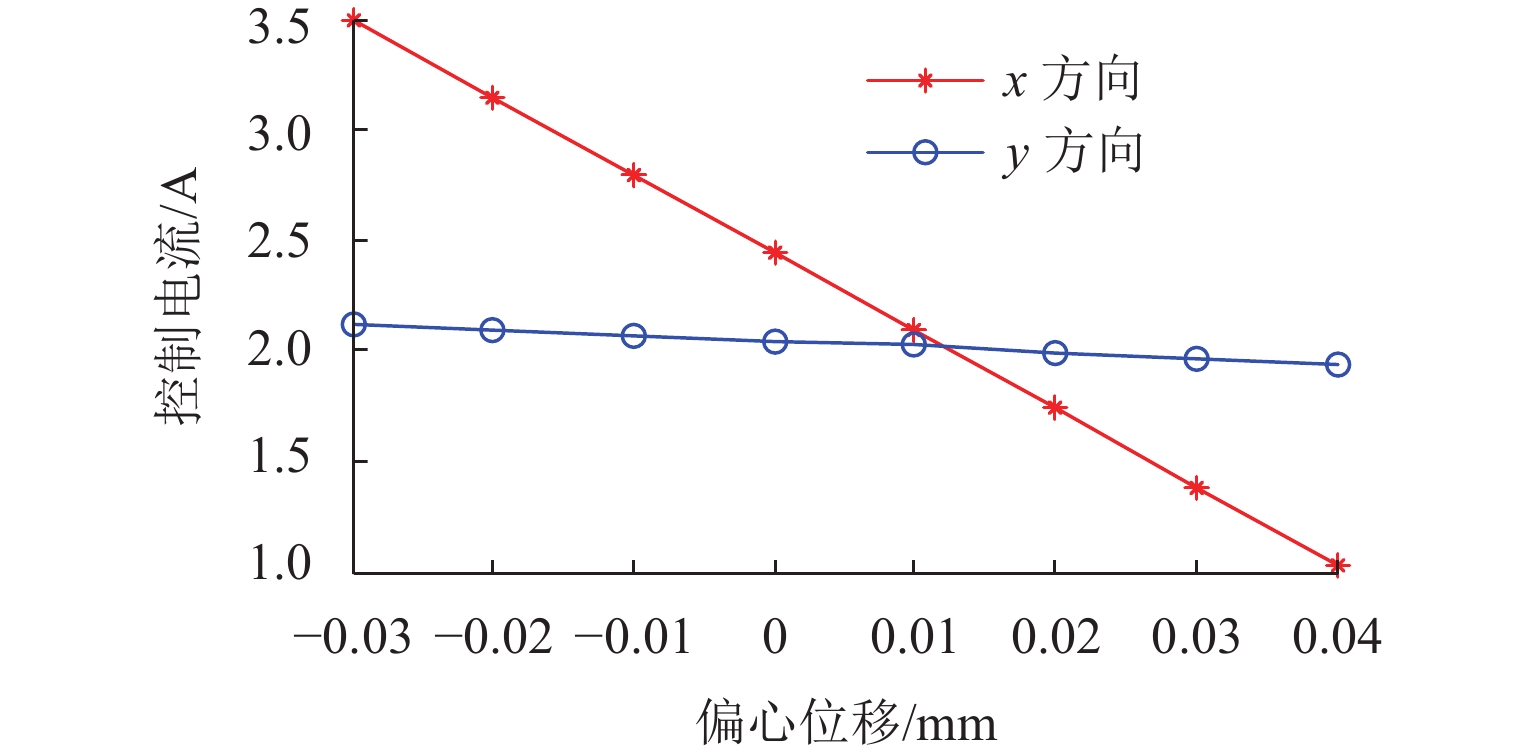
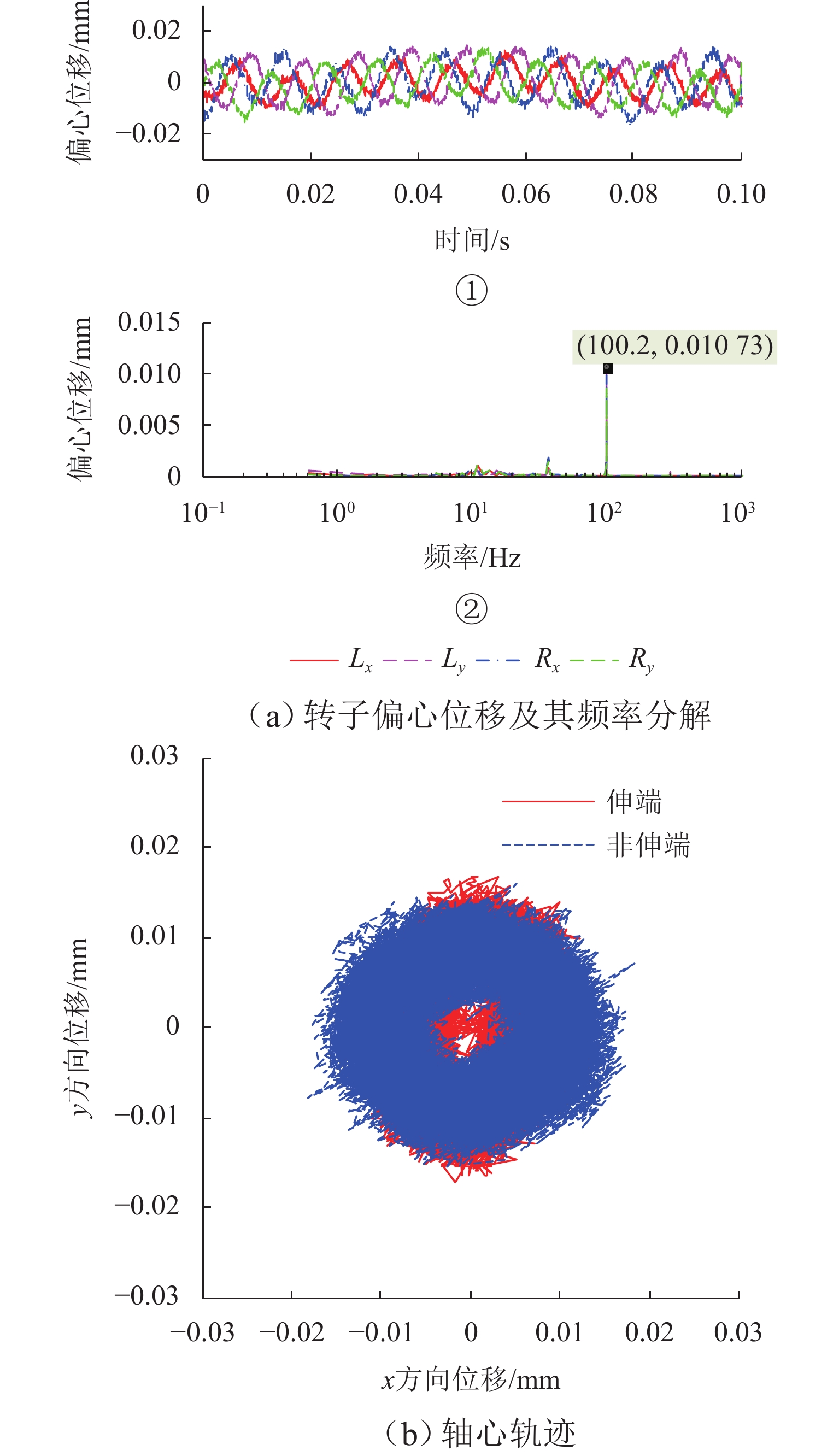
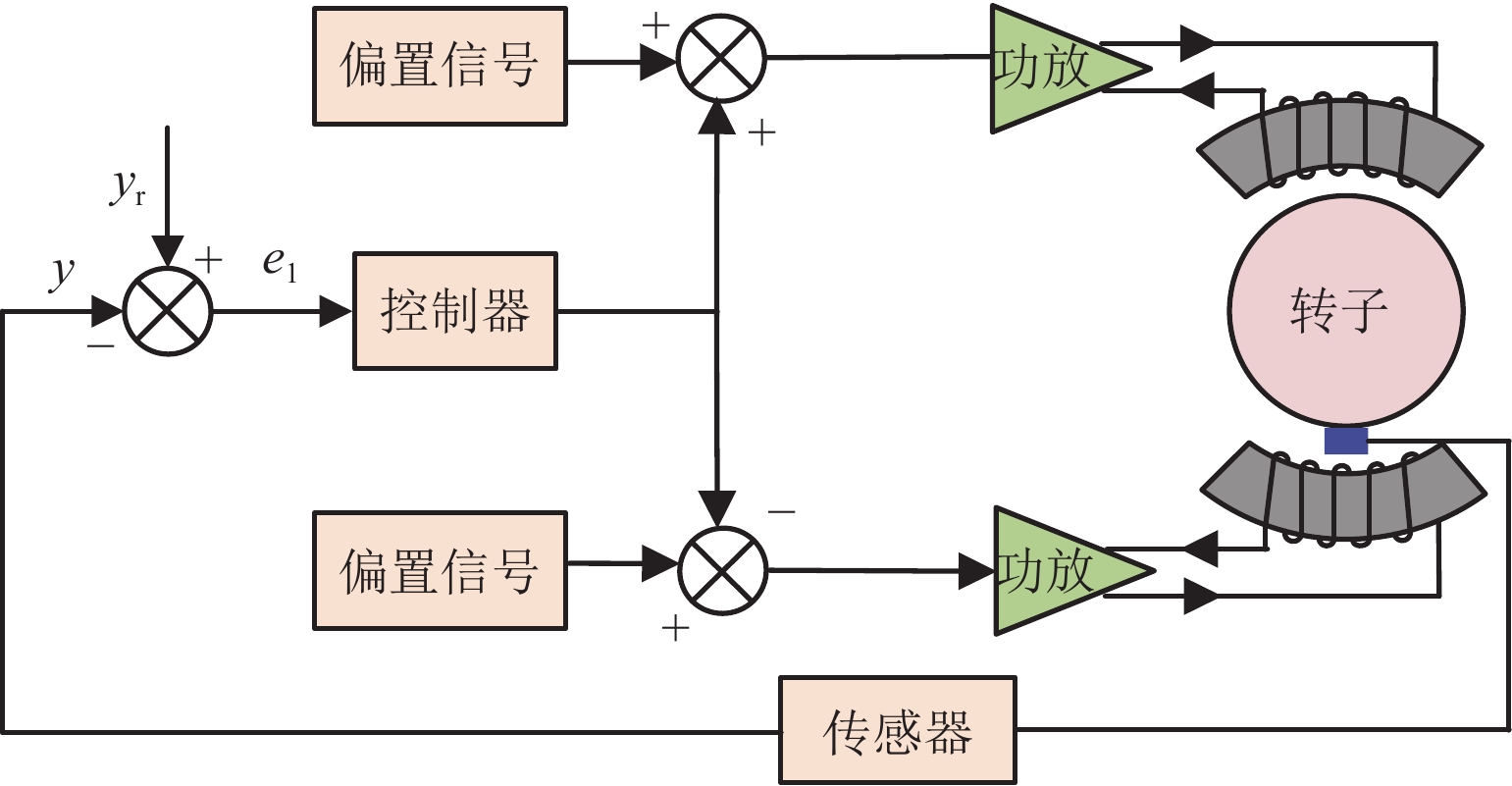
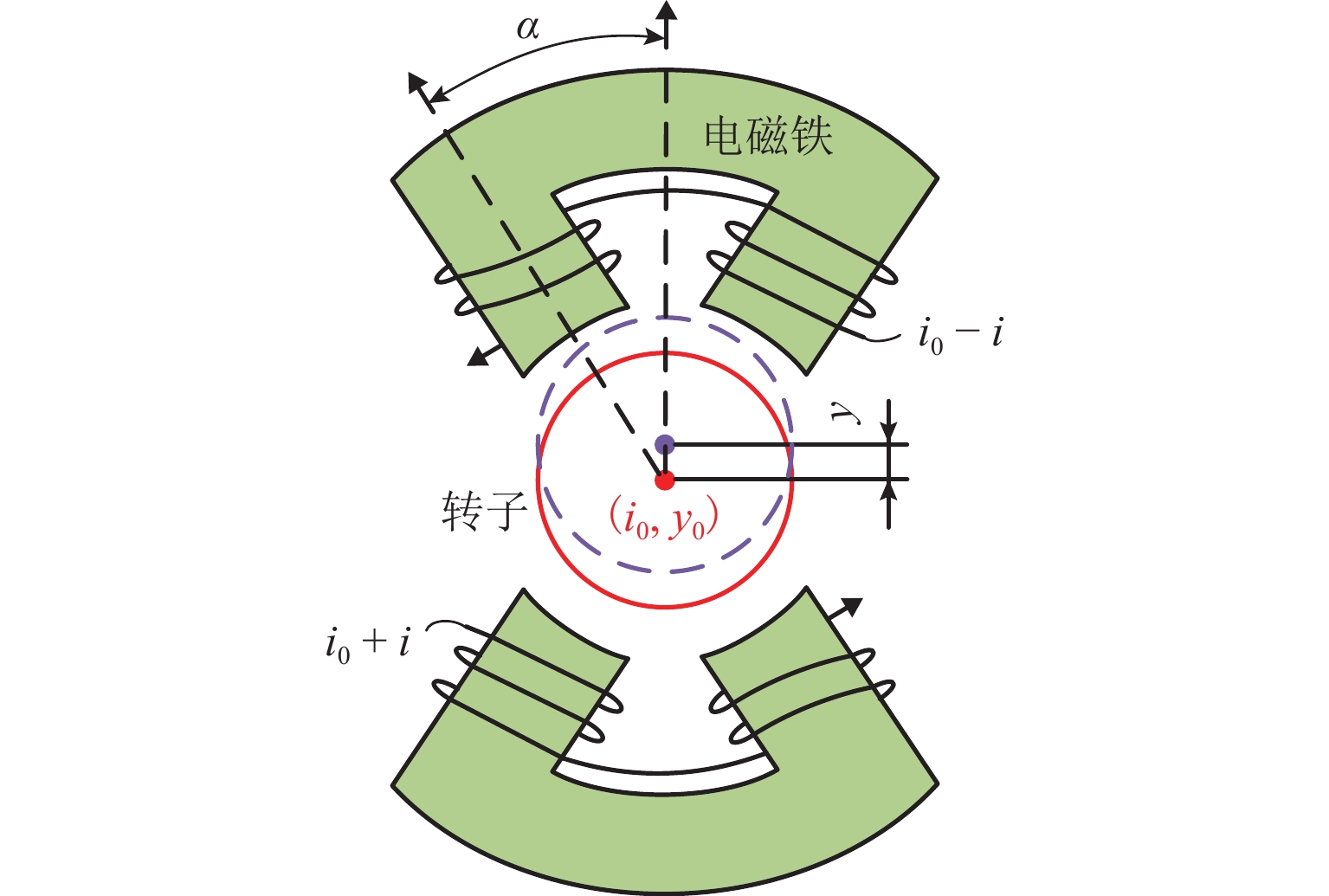
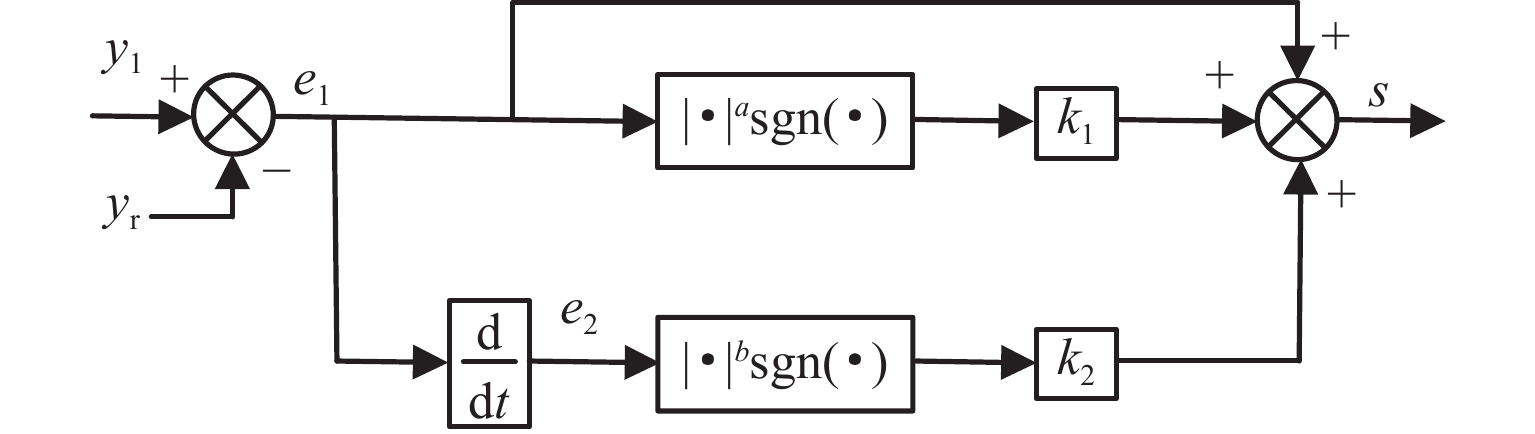
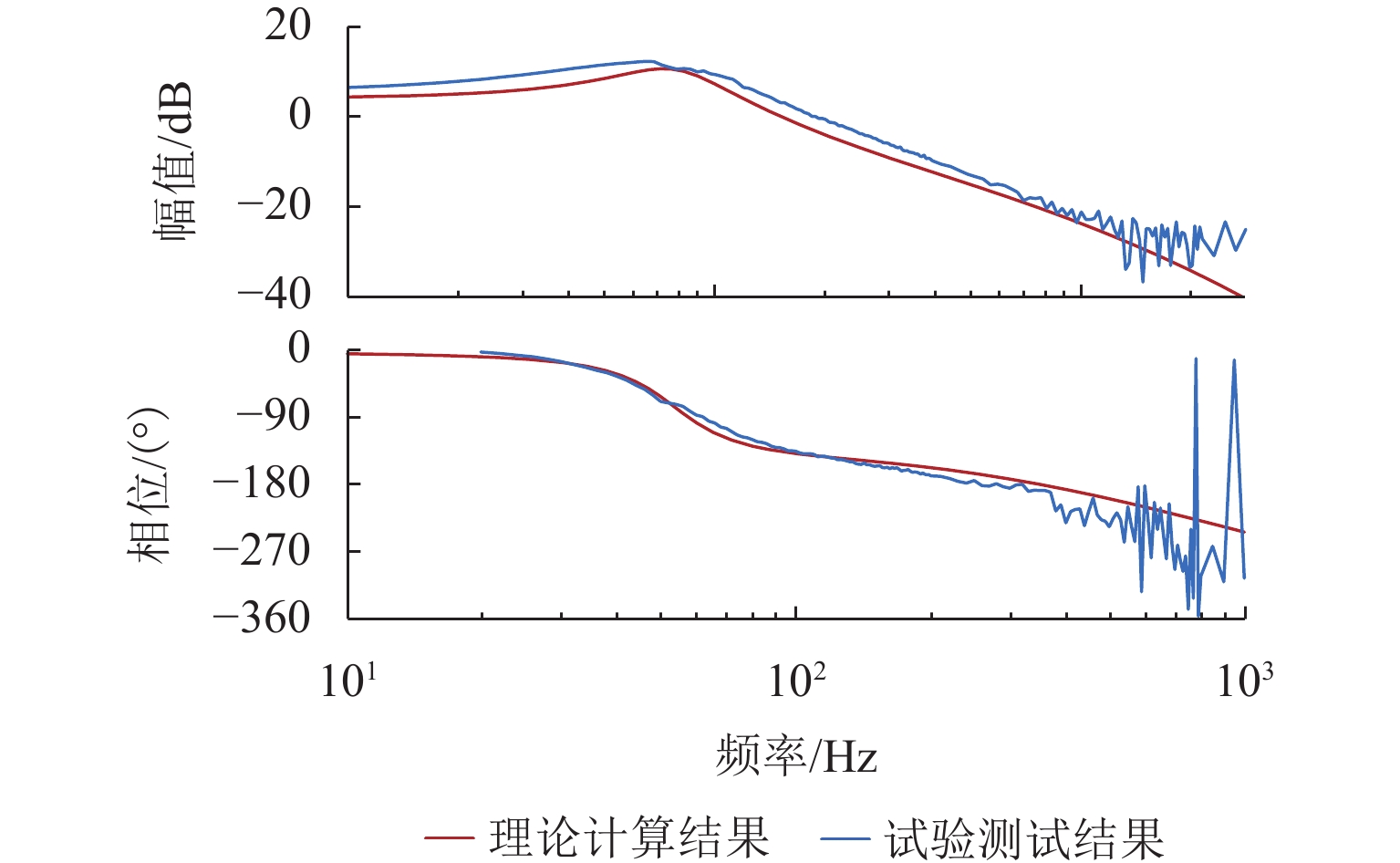
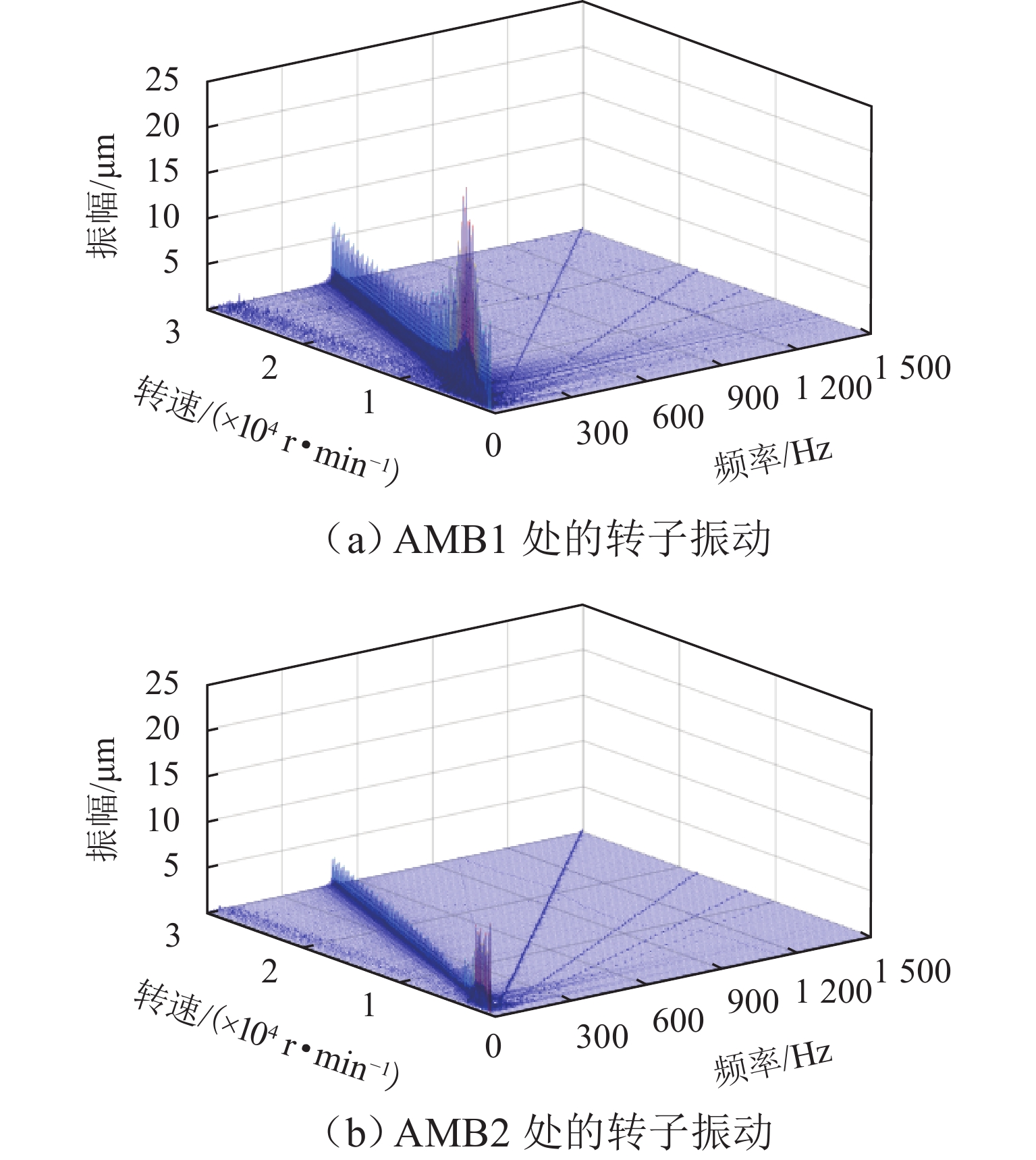
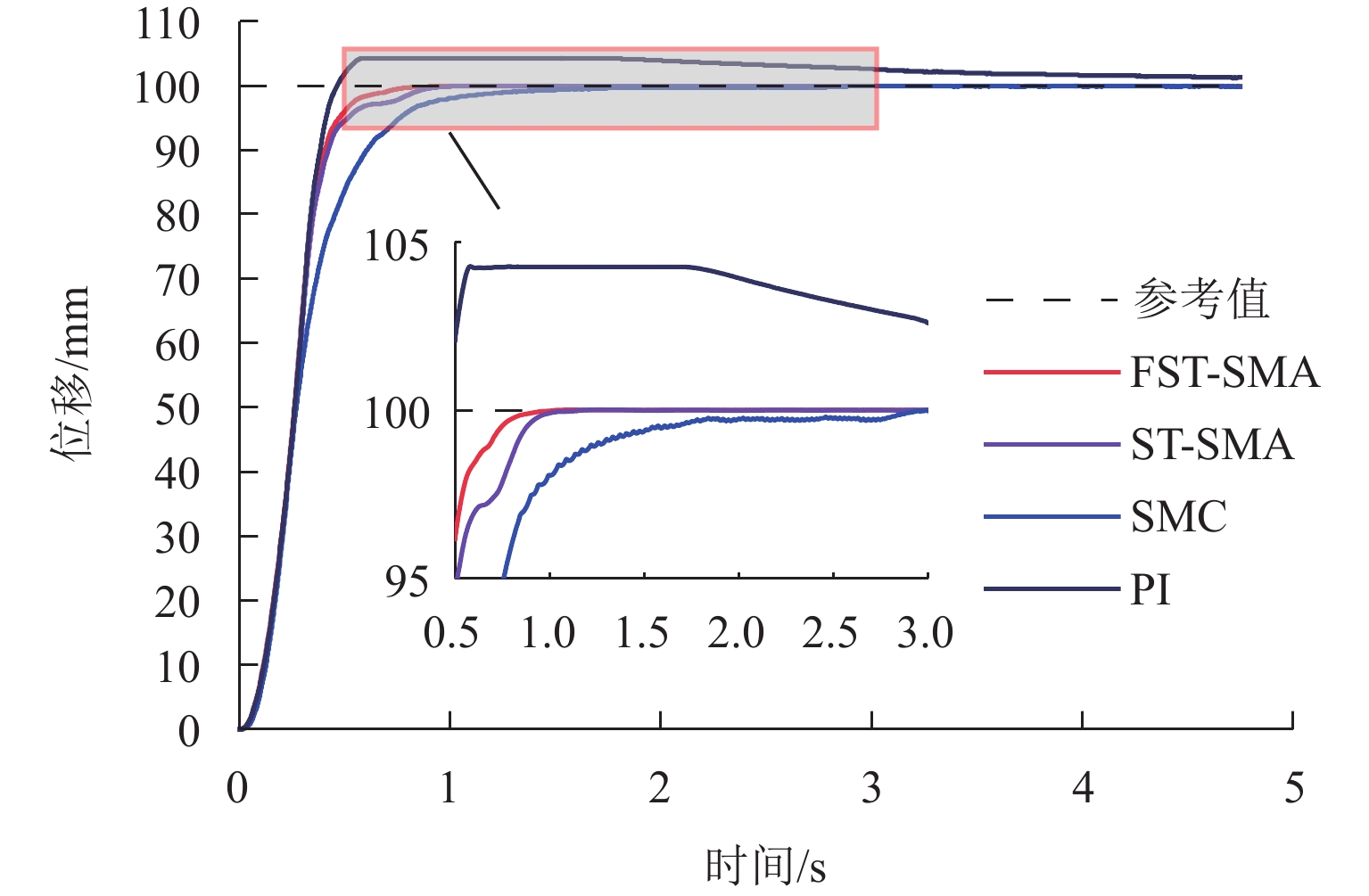
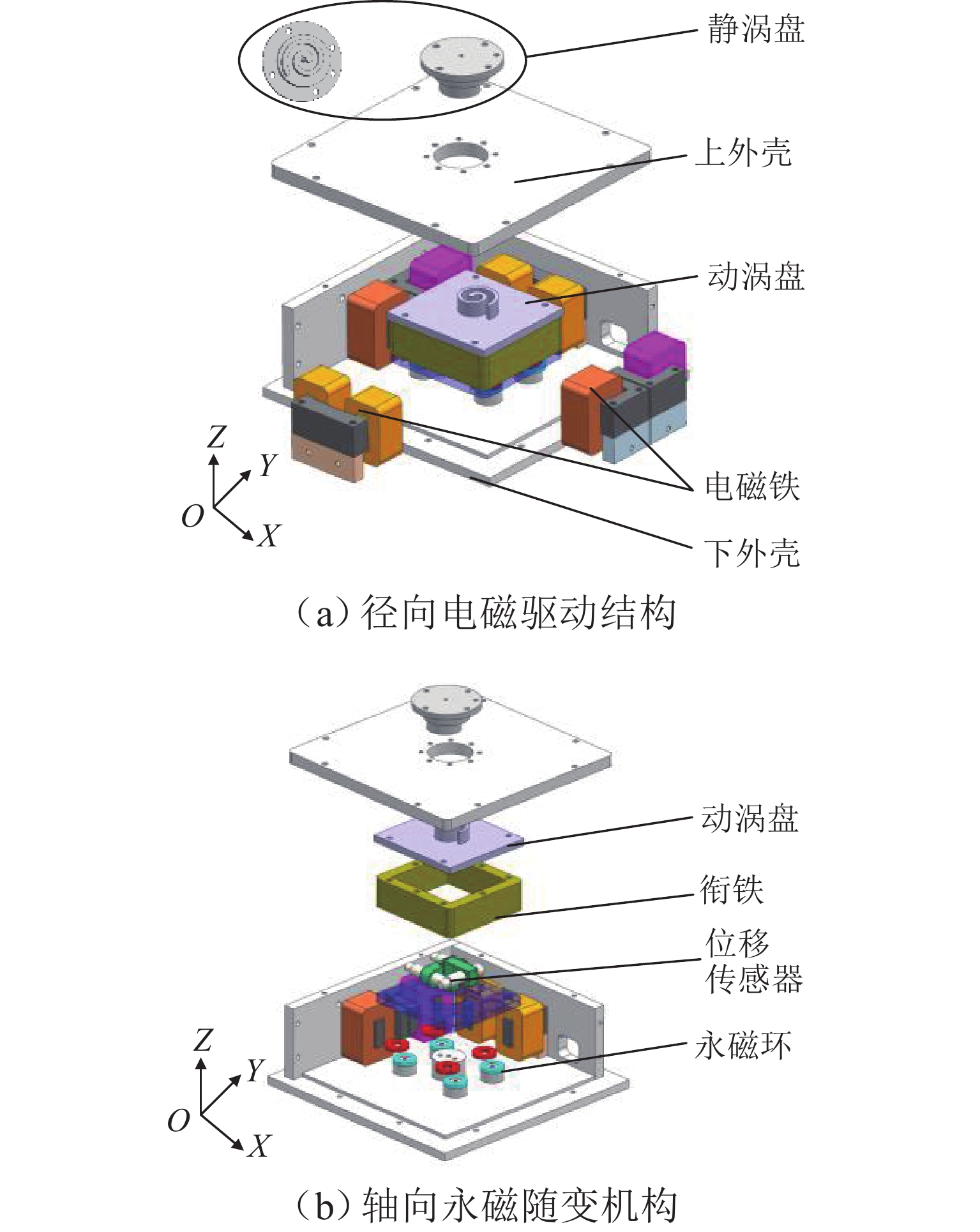
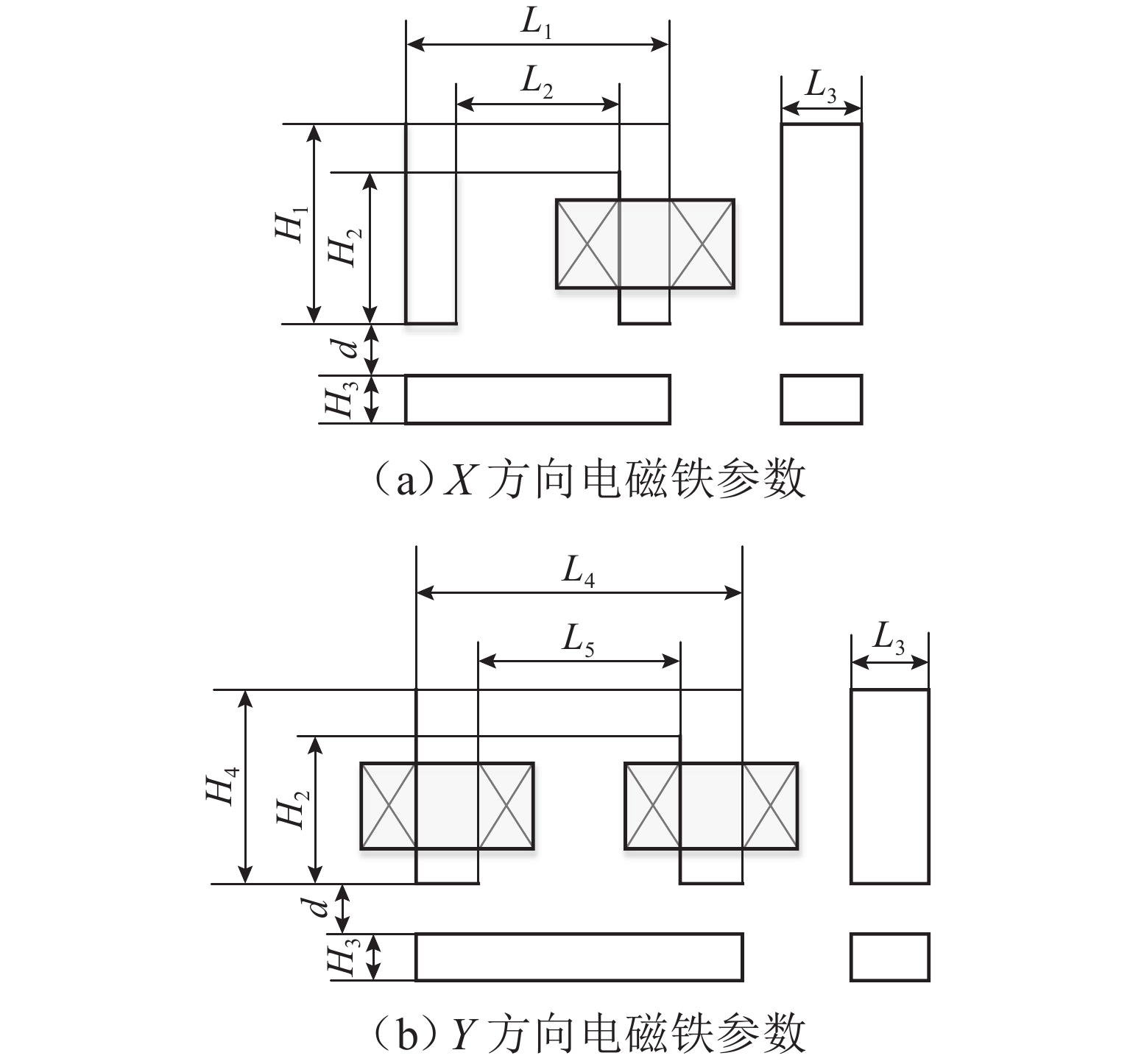
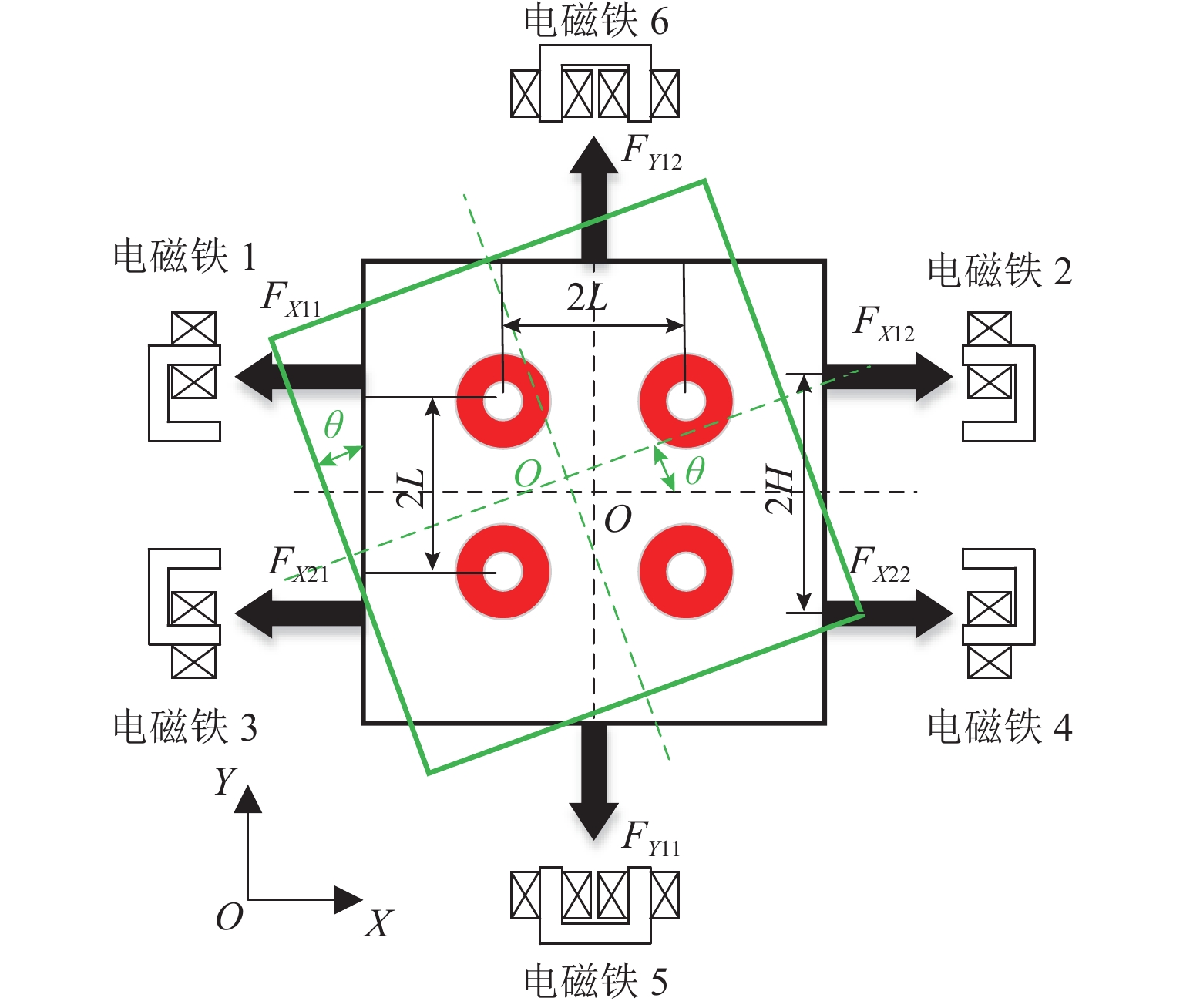
高速重载是磁轴承的重要应用趋势,针对传统磁轴承承载力密度低、电磁设计与控制器设计过程脱离等问题,本文提出通过增大磁轴承工作磁密到材料饱和区,用以提高磁轴承的承载力密度;在此基础上,考虑磁轴承饱和与强机电耦合特性,开展高承载力密度磁轴承结构-控制一体化设计. 首先,考虑饱和、转子偏心等因素,建立高承载力密度磁轴承的非线性磁路模型;其次,根据动力学模型构建磁轴承结构设计与控制系统的耦合关系,同时考虑磁轴承的承载力、功放电压和系统稳定性等约束,以最小轴向长度和最大力变化率作为优化目标,建立高承载力密度磁轴承的多目标优化模型,利用NSGA-Ⅱ算法求解得出高承载力密度磁轴承的设计方案;最后,利用有限元和实验验证设计方案的可行性. 结果表明:相较于传统磁轴承,高承载力密度磁轴承的承载力密度提高了21%,实测样机支承刚度与非线性磁路计算刚度的误差在4.6%以内,能够实现高转速下的稳定运行.


 高级检索
高级检索
 Email alert
Email alert RSS
RSS 摘要
摘要 HTML全文
HTML全文 PDF 3718KB
PDF 3718KB 附件
附件 施引文献
施引文献