

Aerodynamic Characteristics of Open Wire of Superconducting Maglev Train and Its Influence on Levitation State
-
摘要:
超导电动悬浮列车设计速度达到600 km/h,车体附近流动加剧,受到的气动荷载也急剧增加. 为研究超导电动悬浮列车气动荷载作用下车辆的悬浮状态,基于有限元方法,采用SST
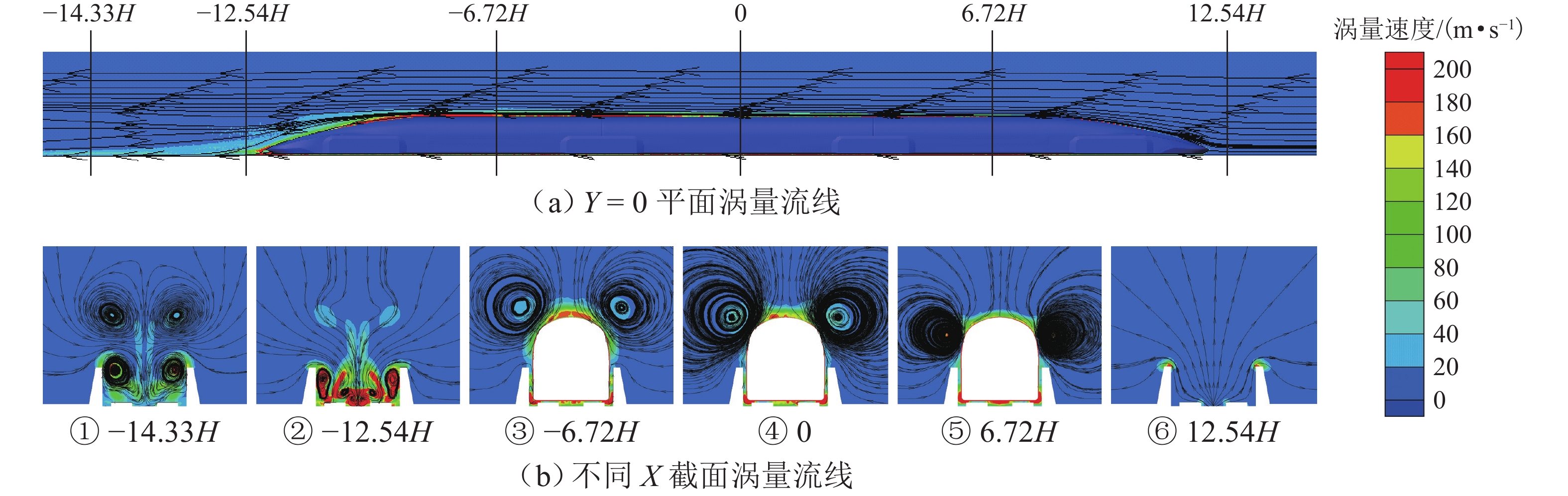
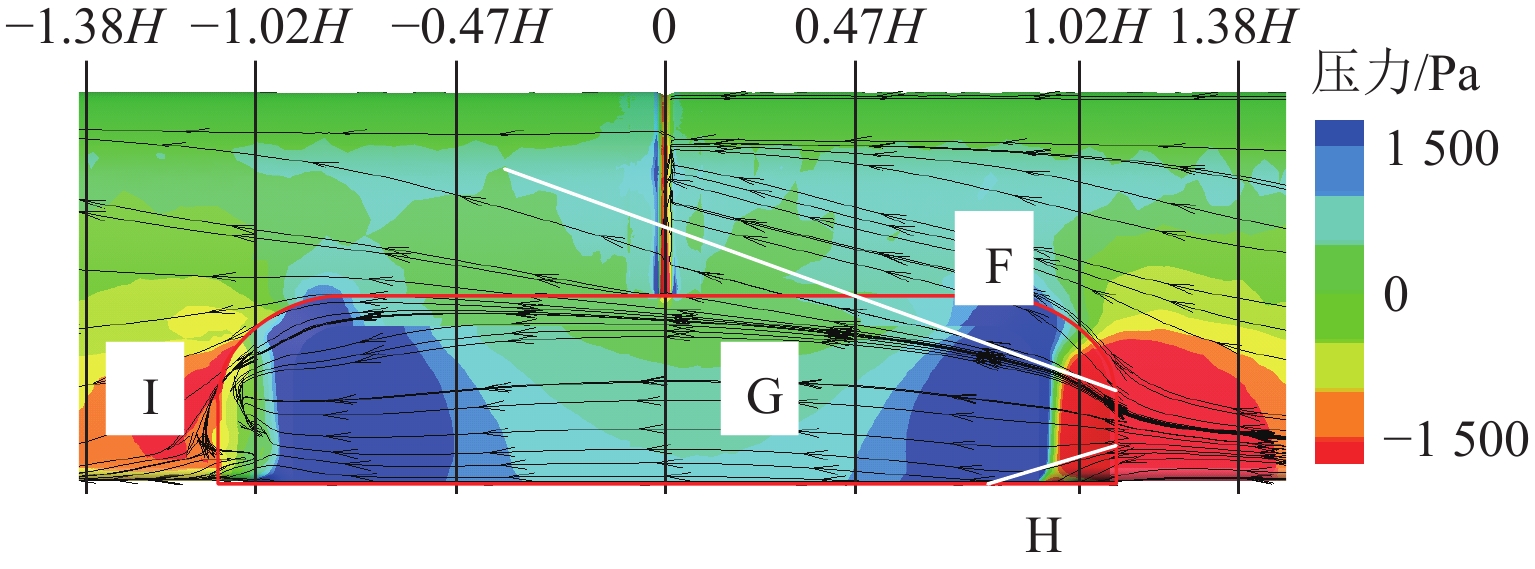
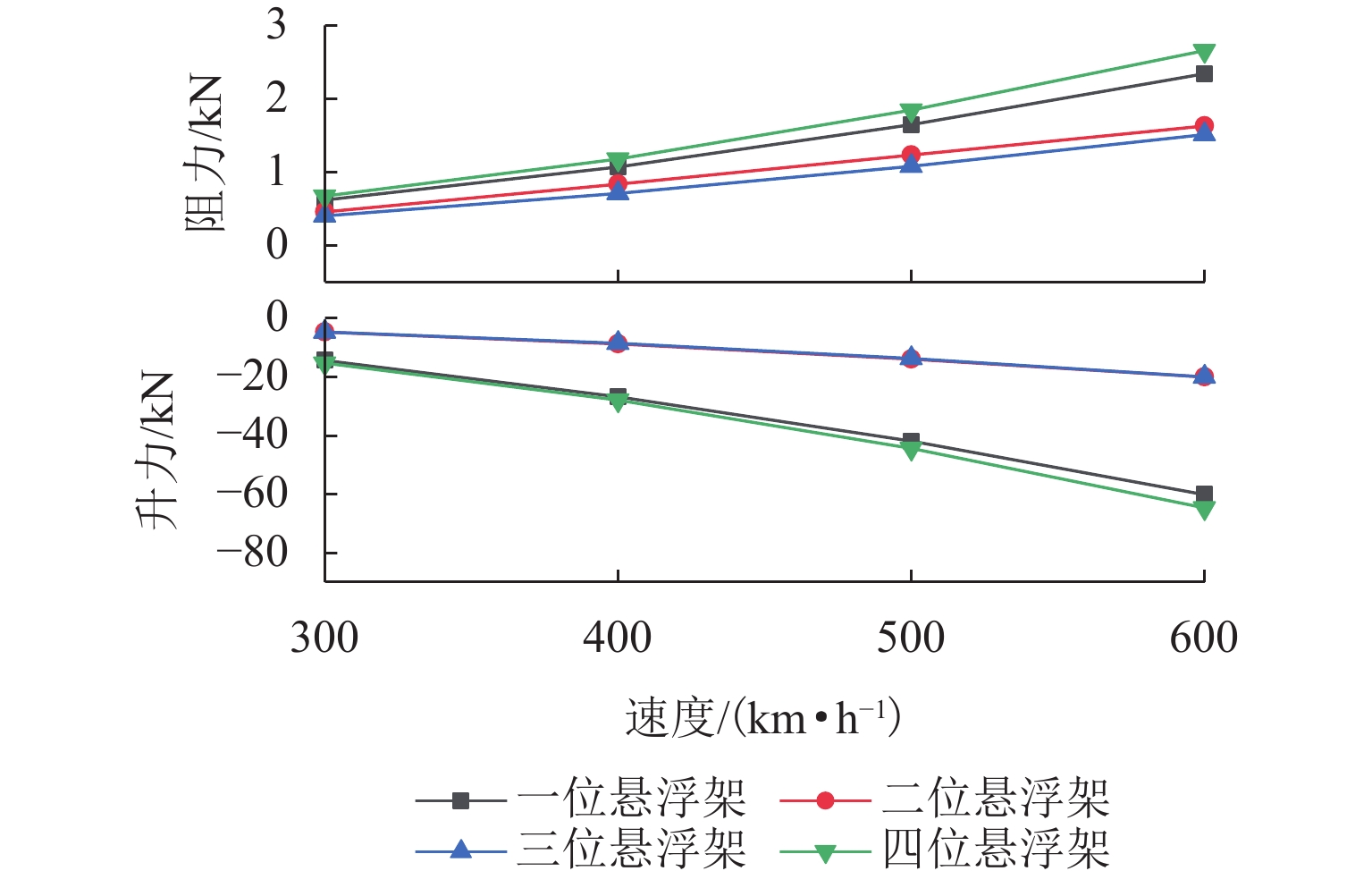
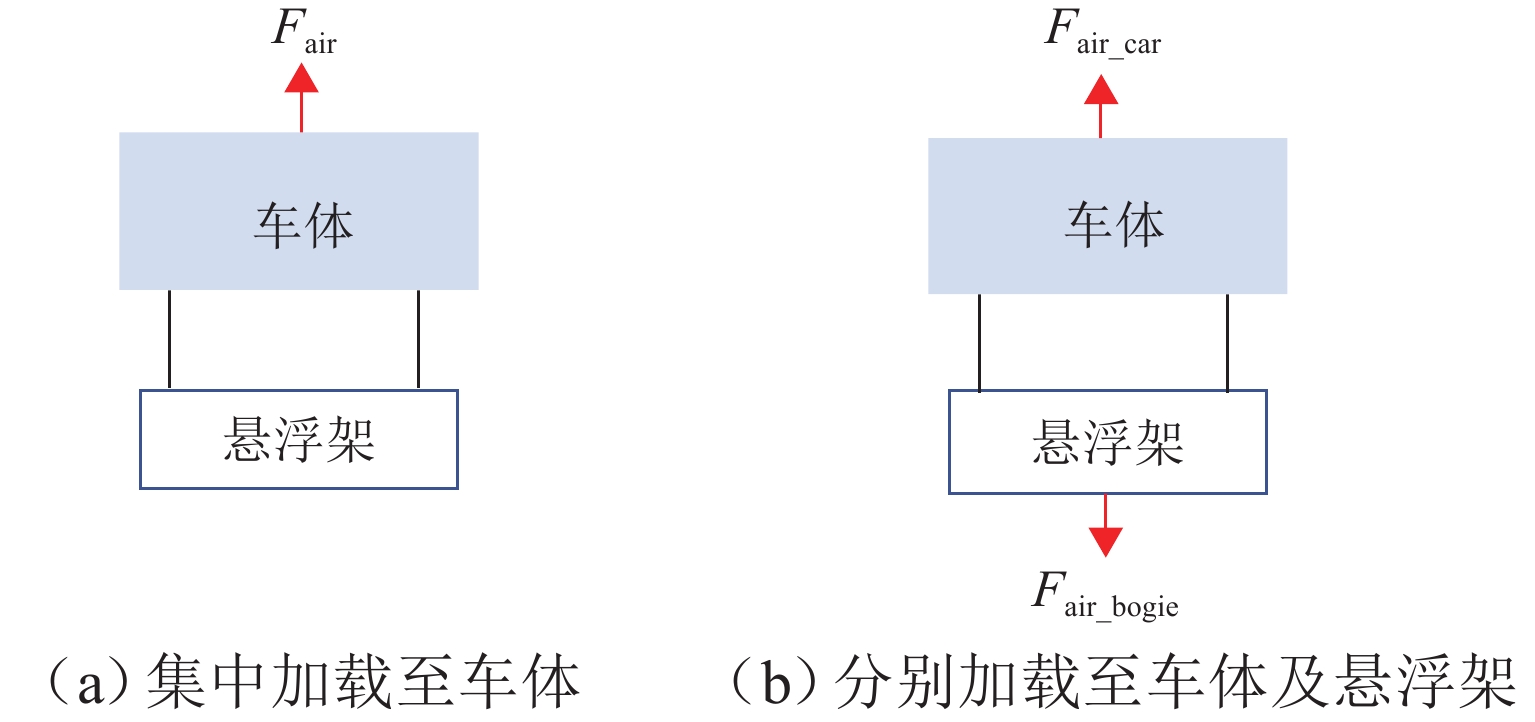
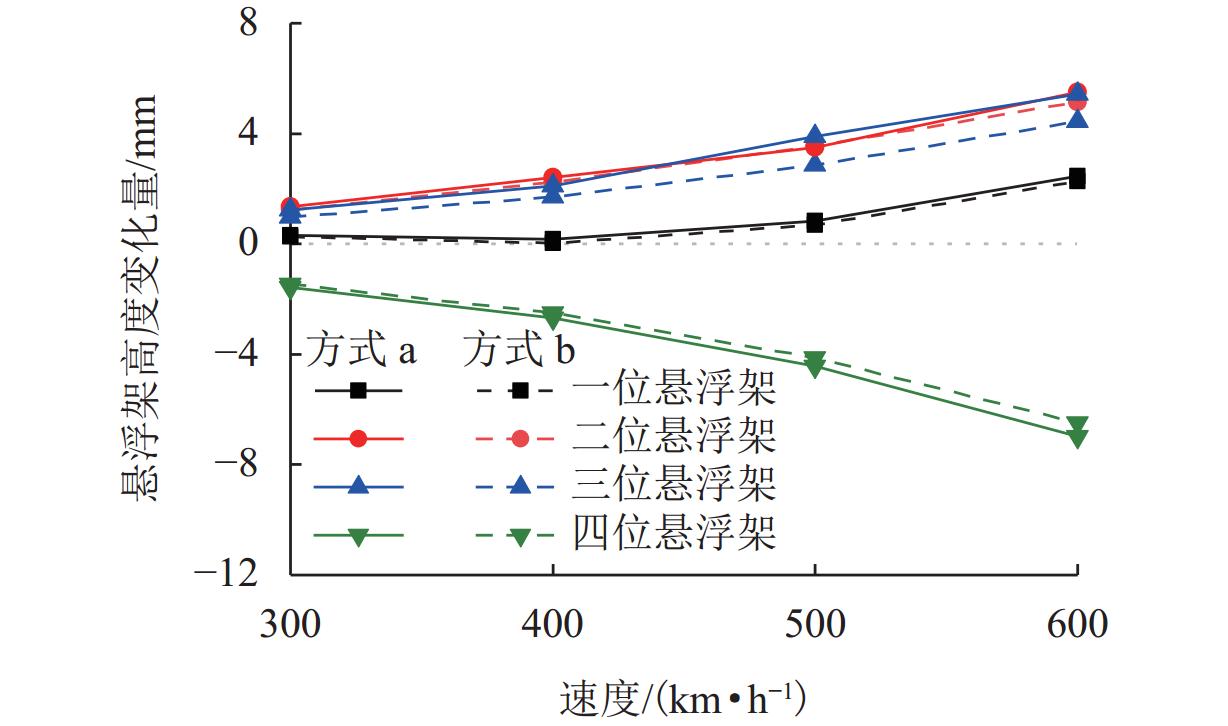
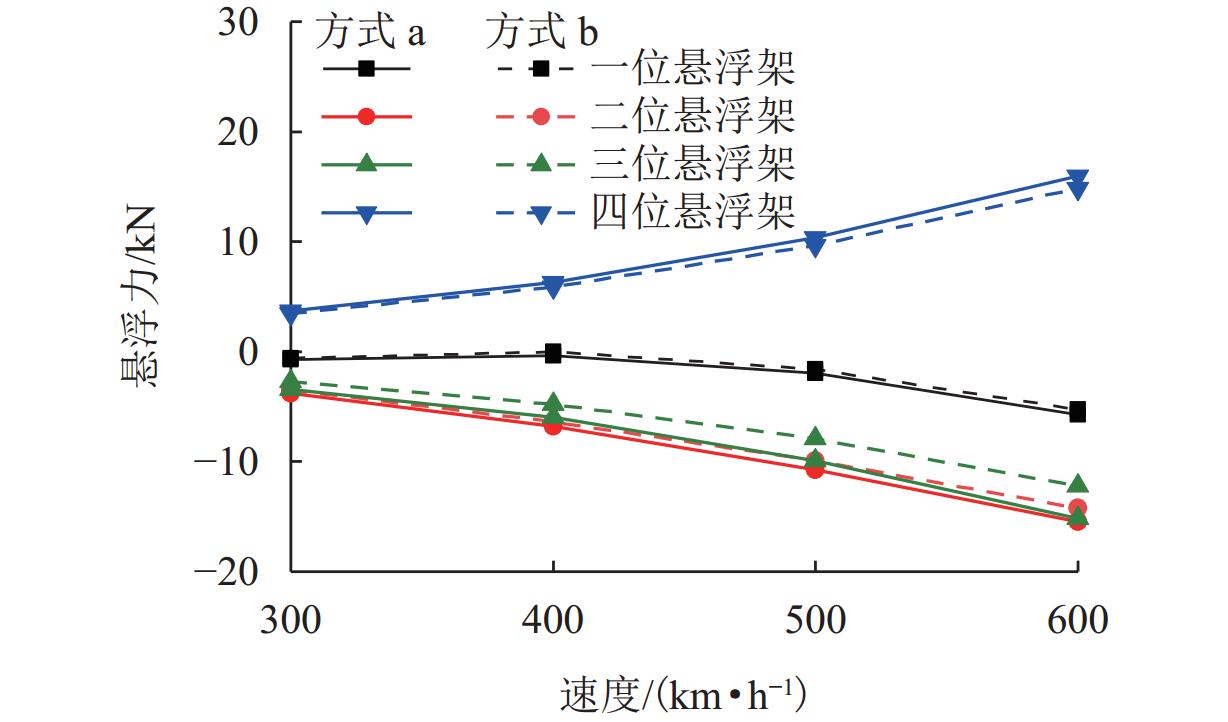
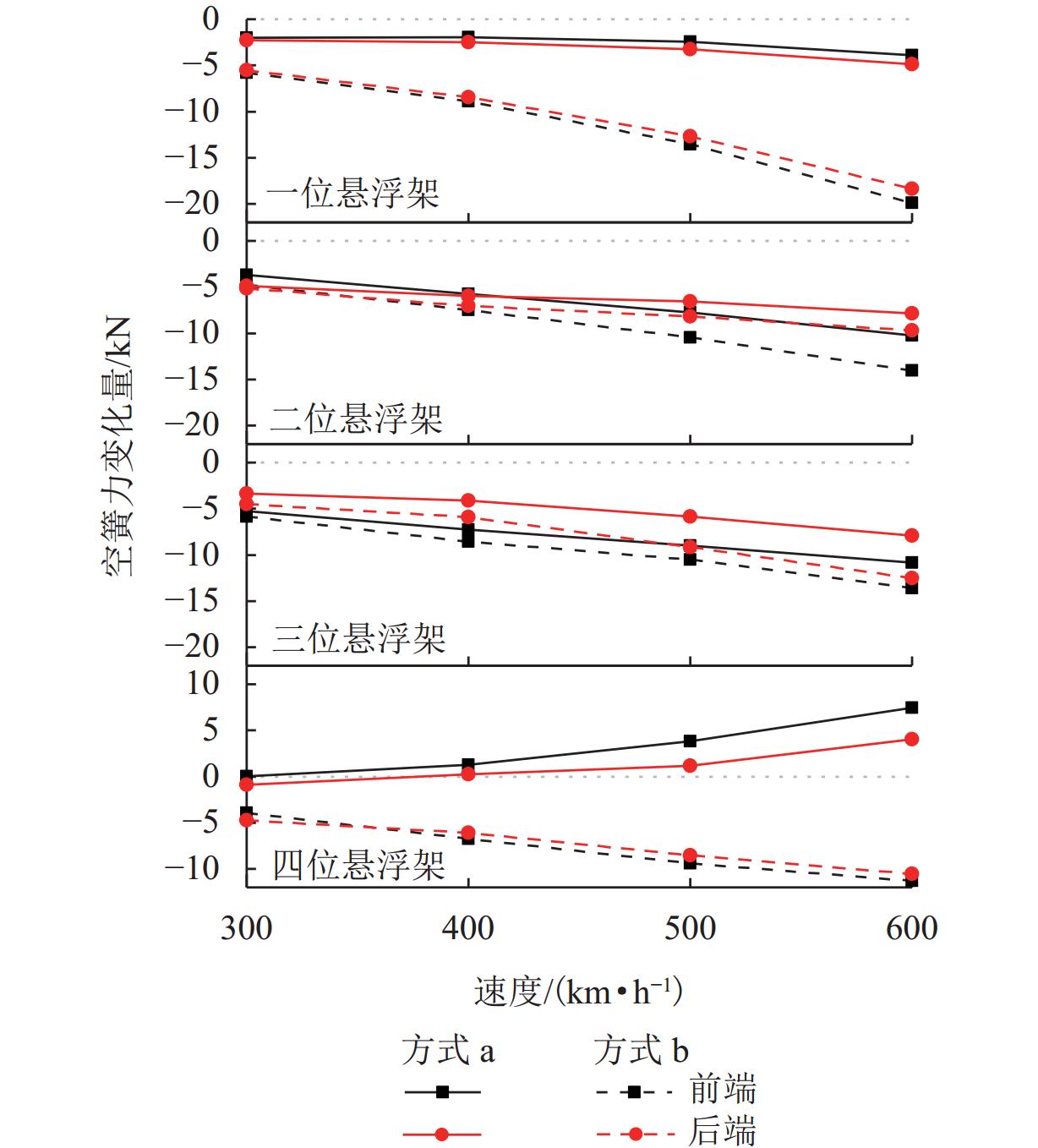
k -ω 湍流模型计算并分析某型磁浮列车明线工况下的气动特性;并基于气动特性提出一种分部件提取气动荷载及加载方式,可以更为真实地反映气动荷载作用下的动力学响应. 磁浮列车气动特性结果表明:U型轨道较大程度限制车体附近流动,尾涡在U型轨内部需要较长距离耗散;磁浮列车悬浮架与轨道间横向间隙变化使得悬浮架底部出现负压,以600 km/h速度为例,整体提取头车及中间车为升力,尾车则为下压力;分部件提取三车体均为升力,且升力幅值从大到小依次为头车、尾车、中间车,悬浮架受到下压力且一位及四位悬浮架压力幅值大于二位及三位悬浮架;2种提取方式的气动荷载合力相同,但分部件提取时,仅车体气动升力幅值达到整体提取方式的约5倍. 气动荷载作用下车辆动力学结果表明:气动荷载对悬浮架位移影响较为有限,最大高度变化量不超过7 mm,且不同加载方式下几乎无差异;2种加载方式对动力学影响的区别主要反映于空簧受力变化量,分部件加载方式下空簧力最大为整体加载方式空簧力的2.86倍.-
关键词:
- 磁浮列车 /
- 计算流体力学(CFD) /
- 气动荷载 /
- 动力学特性
Abstract:The design speed of the superconducting maglev train reaches 600 km/h, causing intensified flow around the vehicle body and a sharp rise in aerodynamic loads. To study the train’s levitation state under aerodynamic loads, the finite element method was used, and the SST
k -ω turbulence model was adopted to calculate the aerodynamic characteristics of a certain type of maglev train under open wire conditions. Additionally, based on these aerodynamic characteristics, a method for extracting aerodynamic loads and loading them in parts was proposed, which could more accurately reflect the dynamic responses under aerodynamic loads. The aerodynamic characteristics of the maglev train indicate that the U-shaped track significantly restricts flow near the vehicle body, making the tail vortex dissipate over a considerable distance within the U-shaped rail. Variations in transverse clearance between the maglev suspension frames and the track lead to the formation of negative pressure beneath the suspension frames. By taking a speed of 600 km/h as an example, the overall extraction of the head train and the middle train generates lift force, while the tail train experiences downforce. Additionally, the lift force is extracted from the individual components of all three vehicle bodies, and the vehicle bodies with lift force values in descending order are as follows: head train, tail train, and middle train. The suspension frames experience downforce, with the pressure amplitude of the first and fourth suspension frames being greater than that of the second and third suspension frames. Although the aerodynamic load force remains consistent across the two extraction methods, the aerodynamic lift amplitude of the vehicle body extracted through partial components is approximately five times greater than that of the whole extraction method. The results of vehicle dynamics under aerodynamic load reveal that the impact of aerodynamic load on suspension frame displacement is minimal, with the maximum height variation being less than 7 mm and showing little difference between the various loading methods. The primary distinction between the two loading modes in terms of dynamics is observed in the variation of the air spring force, where the maximum air spring force in the partial component loading mode is 2.86 times greater than that in the whole loading mode. -
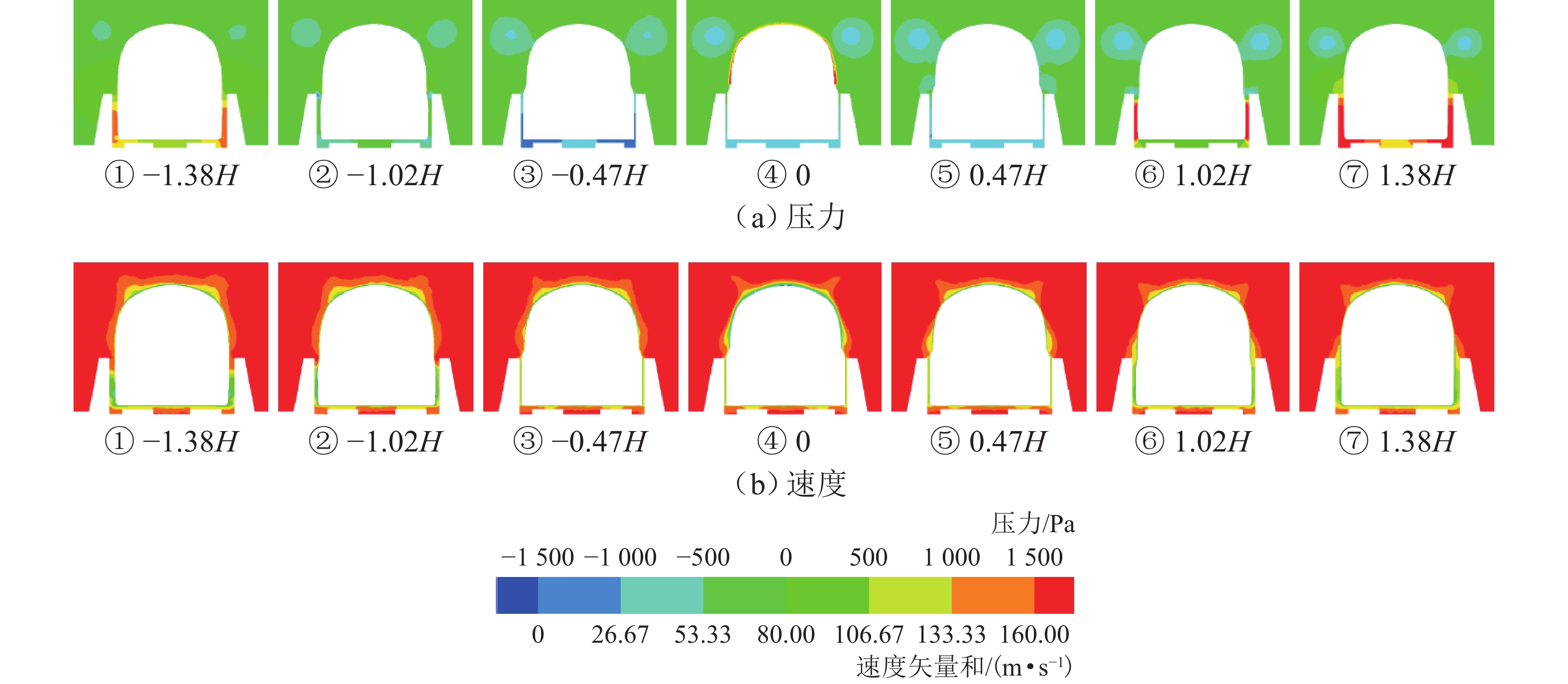
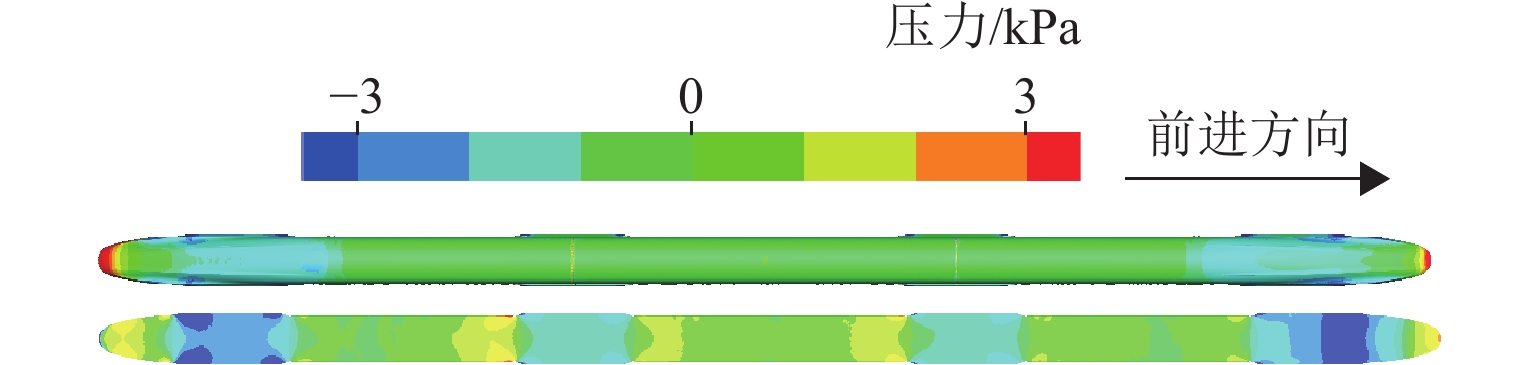
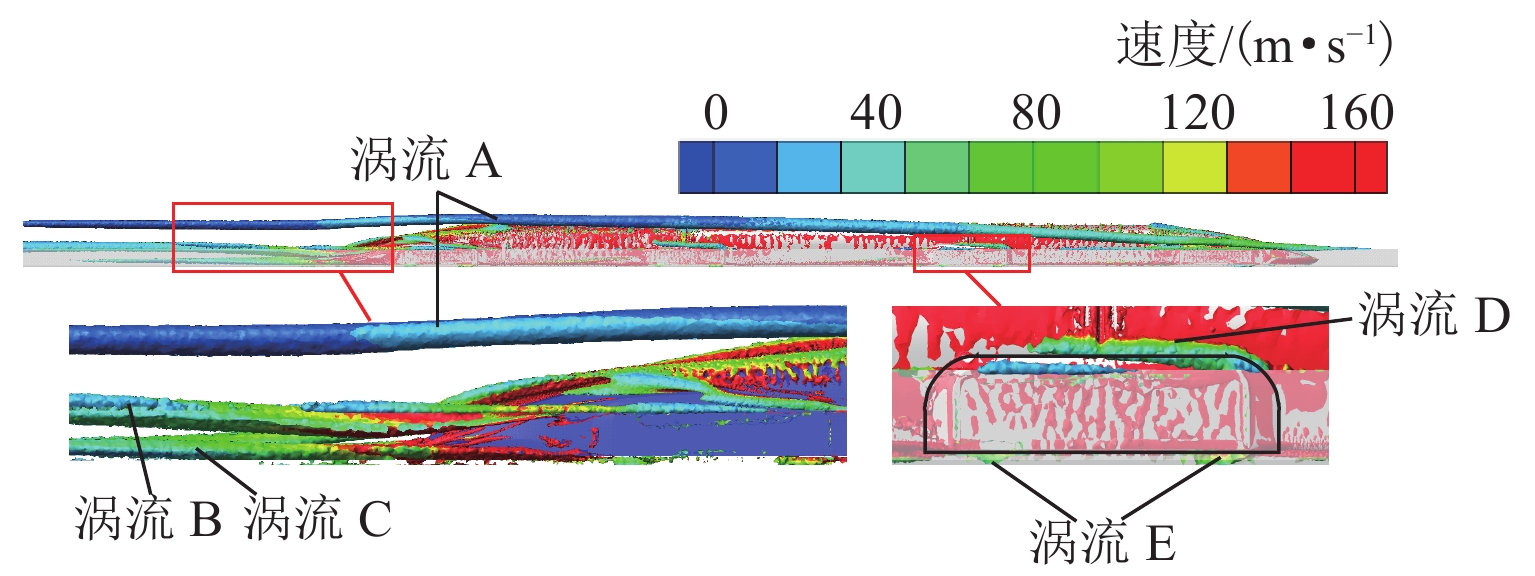
图 10 悬浮架截面压力及速度云图
Figure 10. Pressure and velocity contours of suspension frame section
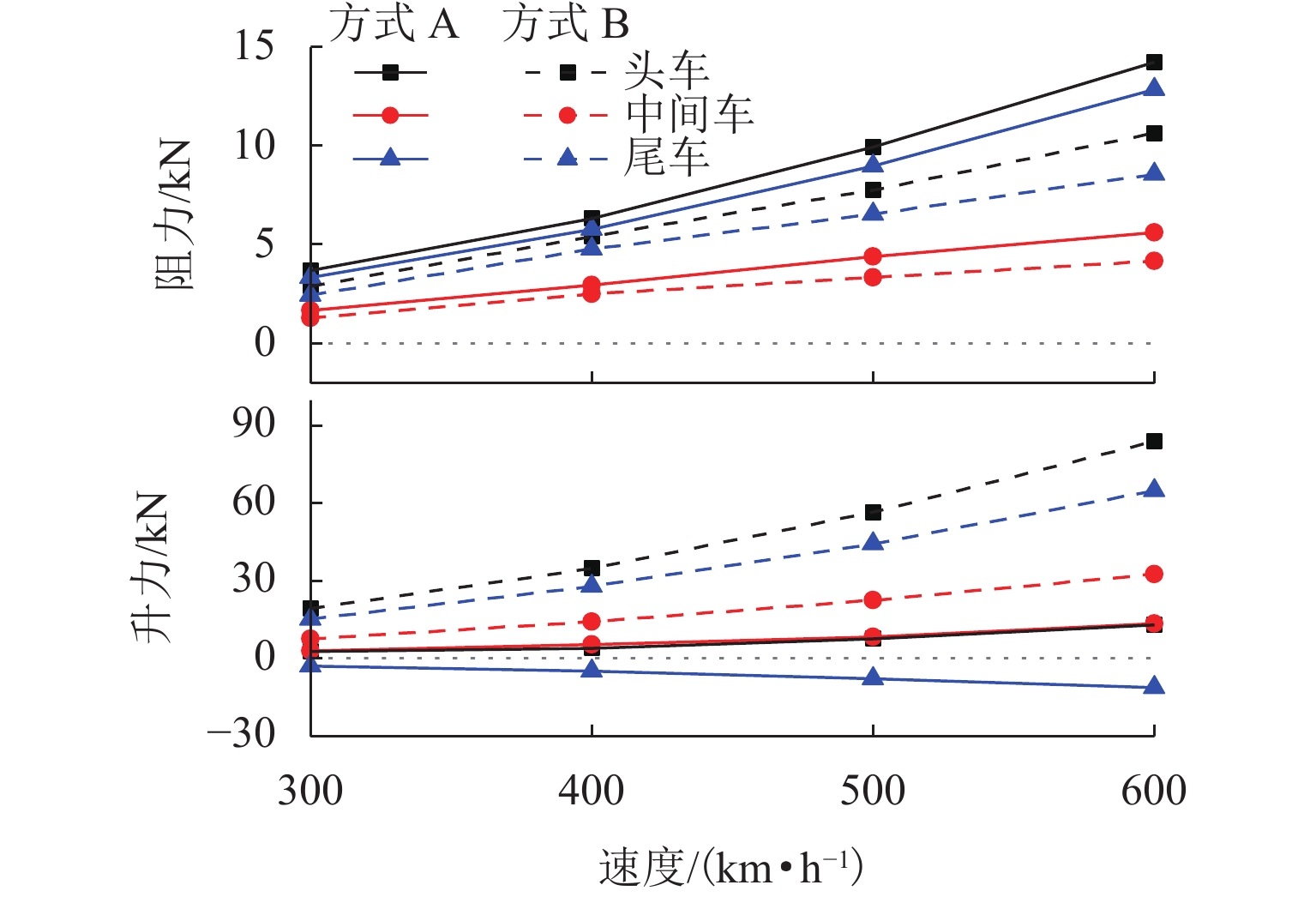
图 11 不同提取方式下车体气动荷载
Figure 11. Aerodynamic load of vehicle body under different extraction methods
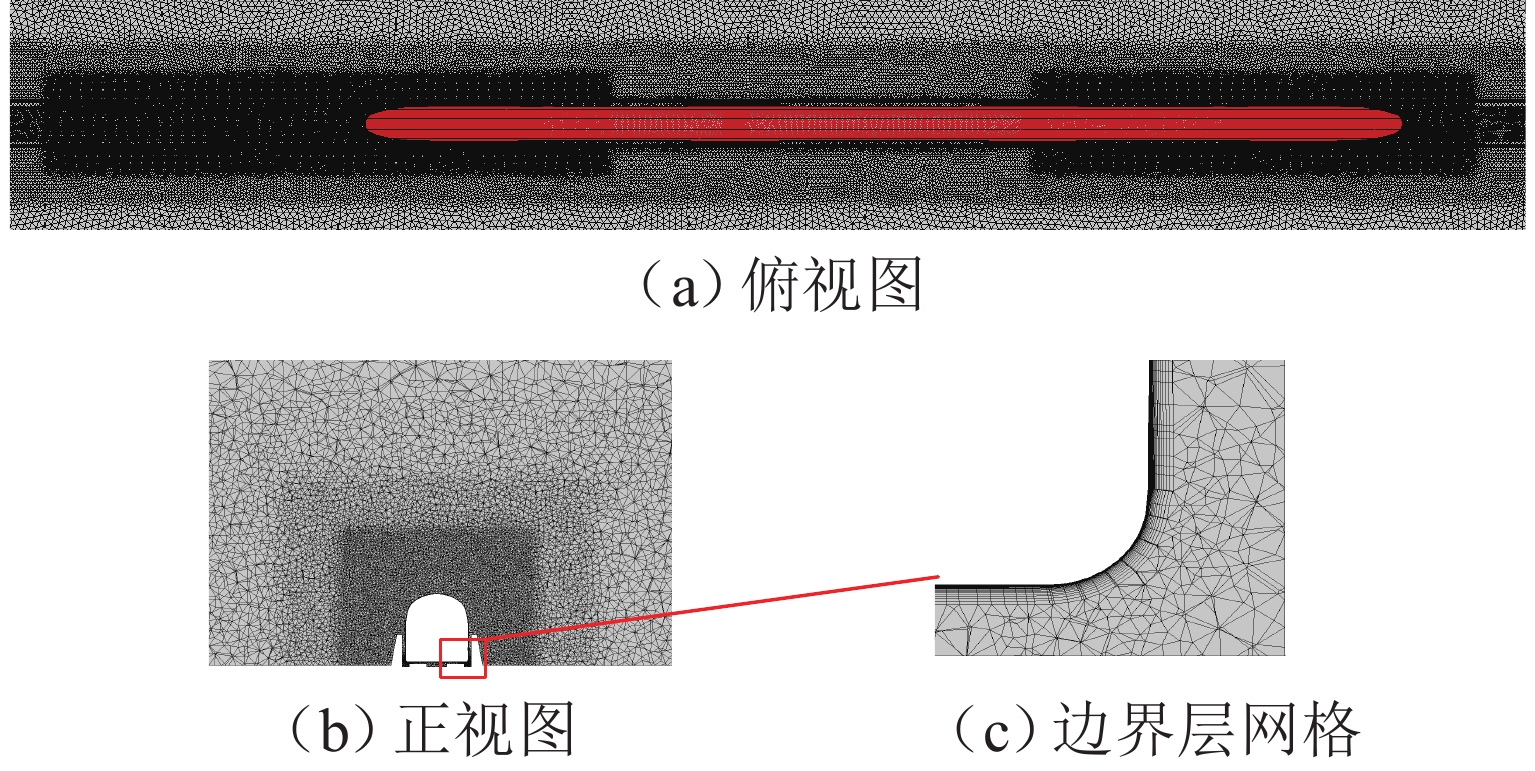
表 1 网格参数
Table 1. Grid parameters
网格质量 数量/
(×107 个)车体最大面
网格/mm加密区最大
体网格/mm粗糙 4.74 100 200 中等 6.60 100 100 精细 7.92 80 100  下载: 导出CSV
下载: 导出CSV
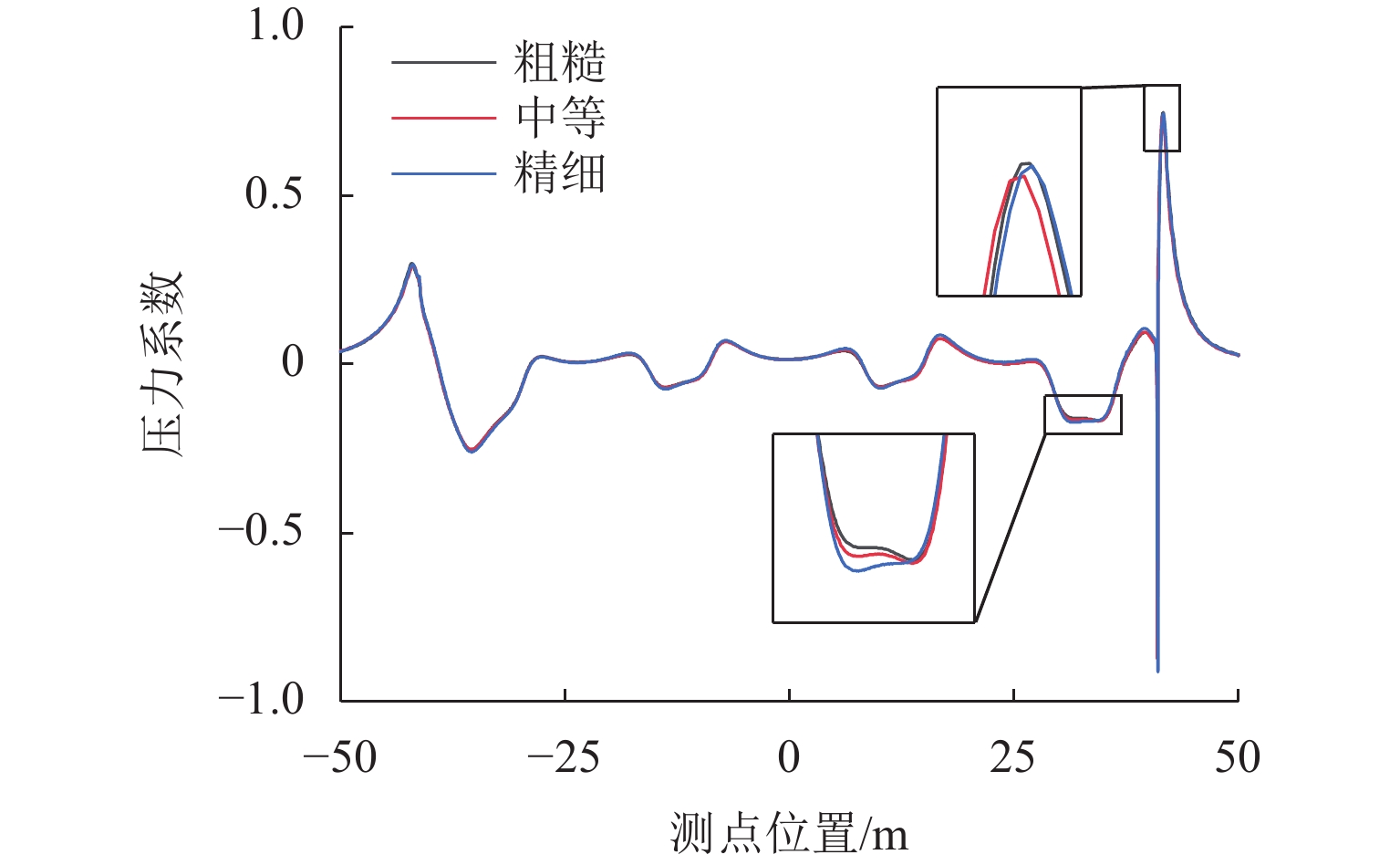
表 2 网格无关性验证
Table 2. Verification of grid independence
网格 ${C_{L,{\mathrm{h}}}}$ ${C_{L,{\mathrm{t}}}}$ $ {C_{D,{\mathrm{h}}}} $ ${C_{D,{\mathrm{t}}}}$ 粗糙 0.0826 − 0.0665 0.0975 0.0828 中等 0.0875 − 0.0755 0.0954 0.0861 精细 0.0868 − 0.0713 0.0975 0.0905
下载: 导出CSV
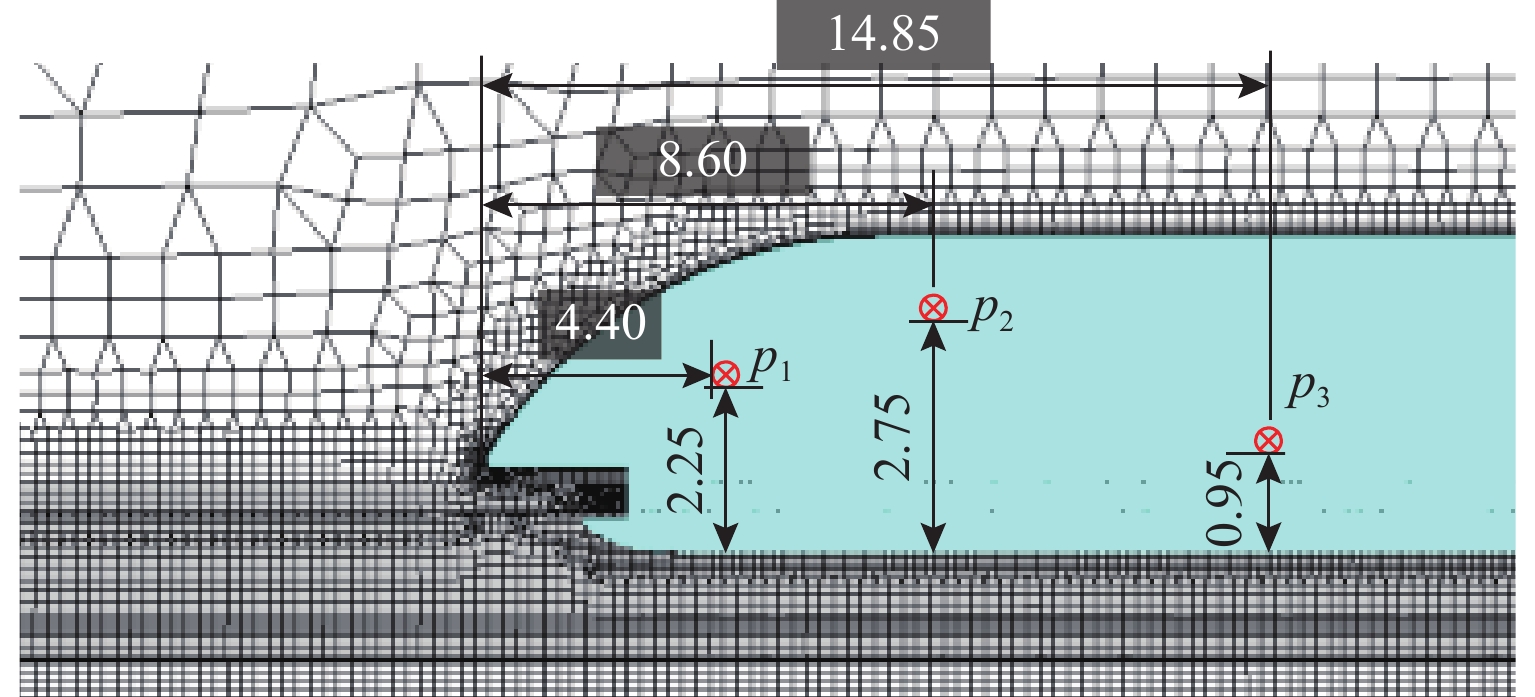
表 3 时均压力系数计算方法验证
Table 3. Validation of calculation method for time averaged pressure coefficent
测点 实测值 计算值 相对误差/% p1 0.240 0.21641 9.83 p2 0.034 0.03294 3.13 p3 0.016 0.01547 3.31
下载: 导出CSV
-
[1] 丁叁叁, 付善强, 梁鑫. 中国高速磁浮交通工程实践与展望[J]. 前瞻科技, 2023, 2(4): 40-48.DING Sansan, FU Shangqiang, LIANG Xin. Engineering practice and prospect of high-speed maglev transportation in China[J]. Science and Technology Foresight, 2023, 2(4): 40-48. [2] 刘士苋, 王磊, 王路忠, 等. 电动悬浮列车及车载超导磁体研究综述[J]. 西南交通大学学报, 2023, 58(4): 734-753. doi: 10.3969/j.issn.0258-2724.20220621LIU Shixian, WANG Lei, WANG Luzhong, et al. Review on electrodynamic suspension trains and on-board superconducting magnets[J]. Journal of Southwest Jiaotong University, 2023, 58(4): 734-753. doi: 10.3969/j.issn.0258-2724.20220621 [3] 于青松, 李凯, 胡浩, 等. 超导电动悬浮应用研究与技术展望[J]. 机车电传动, 2023(4): 1-8.YU Qingsong, LI Kai, HU Hao, et al. Research and technological prospects of applications for superconducting electrodynamic suspension[J]. Electric Drive for Locomotives, 2023(4): 1-8. [4] 邓自刚, 刘宗鑫, 李海涛, 等. 磁悬浮列车发展现状与展望[J]. 西南交通大学学报, 2022, 57(3): 455-474, 530. doi: 10.3969/j.issn.0258-2724.20220001DENG Zigang, LIU Zongxin, LI Haitao, et al. Development status and prospect of maglev train[J]. Journal of Southwest Jiaotong University, 2022, 57(3): 455-474, 530. doi: 10.3969/j.issn.0258-2724.20220001 [5] 田红旗, 张雷, 王田天, 等. 面向行车平稳性的高速磁浮列车气动设计[J]. 前瞻科技, 2023, 2(4): 70-77.TIAN Hongqi, ZHANG Lei, WANG Tiantian, et al. Aerodynamic design of high-speed maglev trains for running stability[J]. Science and Technology Foresight, 2023, 2(4): 70-77. [6] 丁叁叁, 姚拴宝, 陈大伟. 高速磁浮列车气动升力特性[J]. 机械工程学报, 2020, 56(8): 228-234. doi: 10.3901/JME.2020.08.228DING Sansan, YAO Shuanbao, CHEN Dawei. Aerodynamic lift force of high-speed maglev train[J]. Journal of Mechanical Engineering, 2020, 56(8): 228-234. doi: 10.3901/JME.2020.08.228 [7] 丁叁叁, 刘加利, 陈大伟. 600 km/h高速磁浮交通系统气动设计[J]. 实验流体力学, 2023, 37(1): 1-8. doi: 10.11729/syltlx20220131DING Sansan, LIU Jiali, CHEN Dawei. Aerodynamic design of the 600 km/h high-speed maglev transportation system[J]. Journal of Experiments in Fluid Mechanics, 2023, 37(1): 1-8. doi: 10.11729/syltlx20220131 [8] ZHOU P, LI T, ZHAO C F, et al. Numerical study on the flow field characteristics of the new high-speed maglev train in open air[J]. Journal of Zhejiang University: Science A, 2020, 21(5): 366-381. doi: 10.1631/jzus.A1900412 [9] 孟石, 周丹, 孟爽. 轨道间隙对磁浮列车气动性能的影响[J]. 中南大学学报(自然科学版), 2020, 51(12): 3537-3545. doi: 10.11817/j.issn.1672-7207.2020.12.027MENG Shi, ZHOU Dan, MENG Shuang. Effect of rail gap on aerodynamic performance of maglev train[J]. Journal of Central South University (Science and Technology), 2020, 51(12): 3537-3545. doi: 10.11817/j.issn.1672-7207.2020.12.027 [10] 刘加利, 于梦阁, 陈大伟, 等. 考虑四极子声源的高速磁浮列车气动噪声数值模拟方法[J]. 西南交通大学学报, 2024, 59(1): 54-61. doi: 10.3969/j.issn.0258-2724.20220151LIU Jiali, YU Mengge, CHEN Dawei, et al. Numerical simulation method of aerodynamic noise of high-speed maglev train considering quadrupole noise source[J]. Journal of Southwest Jiaotong University, 2024, 59(1): 54-61. doi: 10.3969/j.issn.0258-2724.20220151 [11] 李一凡, 李田, 张继业, 等. 导流装置对高速磁浮列车气动特性的影响[J]. 实验流体力学, 2023, 37(1): 91-99.LI Yifan, LI Tian, ZHANG Jiye, et al. Effect of deflector devices on the aerodynamic characteristics of high-speed maglev trains[J]. Journal of Experiments in Fluid Mechanics, 2023, 37(1): 91-99. [12] 王潇飞, 胡啸, 李宗澎, 等. 轨道结构对真空管道磁浮列车气动特性的影响[J]. 实验流体力学, 2023, 37(3): 9-18. doi: 10.11729/syltlx20220140WANG Xiaofei, HU Xiao, LI Zongpeng, et al. The effect of track structure on the aerodynamic characteristics of evacuated tube maglev train[J]. Journal of Experiments in Fluid Mechanics, 2023, 37(3): 9-18. doi: 10.11729/syltlx20220140 [13] KOZUMA Y, YAMAMOTO K, TAGAWA N, et al. D601 main design features of the newest vehicles of the yamanashi maglev test line[J]. The Proceedings of International Symposium on Seed-Up and Service Technology for Railway and Maglev Systems: STECH, 2003, 2003: 461-466. [14] YAMAMOTO K, KOZUMA Y, TAGAWA N, et al. Improving maglev vehicle characteristics for the yamanashi test line[J]. Quarterly Report of RTRI, 2004, 45(1): 7-12. doi: 10.2219/rtriqr.45.7 [15] LIN T T, YANG M Z, ZHANG L, et al. Influence of the suspension gap on the wake characteristics of a 600 km/h superconducting maglev train[J]. Physics of Fluids, 2024, 36(2): 1-11. [16] 赵春发, 冯洋, 翟婉明. 面向列车稳定舒适运行的磁浮交通车线动力学参数匹配设计[J]. 前瞻科技, 2023, 2(4): 49-60.ZHAO Chunfa, FENG Yang, ZHAI Wanming. Matching design of train and line dynamics parameters of maglev transportation oriented toward stable and comfortable train running[J]. Science and Technology Foresight, 2023, 2(4): 49-60. [17] 杨永刚, 陈大伟, 梅元贵. 600 km/h高速磁浮列车明线交会横向气动性能[J]. 振动与冲击, 2022, 41(1): 137-146.YANG Yonggang, CHEN Dawei, MEI Yuangui. Lateral aerodynamic performance of 600 km/h high-speed maglev train during open line intersection[J]. Journal of Vibration and Shock, 2022, 41(1): 137-146. [18] 刘堂红, 田红旗. 磁浮列车明线交会横向振动分析[J]. 交通运输工程学报, 2005, 5(1): 39-44. doi: 10.3321/j.issn:1671-1637.2005.01.010LIU Tanghong, TIAN Hongqi. Transverse vibration analysis of two maglev trains passing by in open air[J]. Journal of Traffic and Transportation Engineering, 2005, 5(1): 39-44. doi: 10.3321/j.issn:1671-1637.2005.01.010 [19] 南凯威, 刘梦娟, 郝占宙, 等. 典型气动荷载作用下磁浮列车动力学特性研究[J]. 实验流体力学, 2023, 37(3): 69-83. doi: 10.11729/syltlx20220108NAN Kaiwei, LIU Mengjuan, HAO Zhanzhou, et al. Research of dynamic characteristics of maglev train under typical aerodynamic loads[J]. Journal of Experiments in Fluid Mechanics, 2023, 37(3): 69-83. doi: 10.11729/syltlx20220108 [20] WU H, ZENG X H, GAO D G, et al. Dynamic stability of an electromagnetic suspension maglev vehicle under steady aerodynamic load[J]. Applied Mathematical Modelling, 2021, 97: 483-500. doi: 10.1016/j.apm.2021.04.008 [21] 张娟, 赵春发, 冯洋, 等. 超导磁浮列车电动悬浮导向力学特性研究[J]. 机械, 2020, 47(9): 25-32. doi: 10.3969/j.issn.1006-0316.2020.09.004ZHANG Juan, ZHAO Chunfa, FENG Yang, et al. Study on mechanical characteristics of the electrodynamic levitation and guidance system for the superconducting maglev train[J]. Machinery, 2020, 47(9): 25-32. doi: 10.3969/j.issn.1006-0316.2020.09.004 [22] 田红旗. 列车空气动力学[M]. 北京: 中国铁道出版社, 2007: 26-57. [23] 国家铁路局. 列车空气动力学计算标准: TB/T 3503.4—2018 [S]. 北京: 中国标准出版社, 2018. [24] 毕海权, 雷波, 张卫华. TR型磁浮列车气动力特性数值计算研究[J]. 铁道学报, 2004, 26(4): 51-54. doi: 10.3321/j.issn:1001-8360.2004.04.011BI Haiquan, LEI Bo, ZHANG Weihua. Research on numerical calculation for aerodynamic characteristics of the TR maglev train[J]. Journal of the China Railway Society, 2004, 26(4): 51-54. doi: 10.3321/j.issn:1001-8360.2004.04.011 [25] NING X F, ZHAO C F, YU Q S, et al. Suspension and guidance performance of a new superconducting EDS system using the 8-shaped ground coils with nonequal turns[J]. IEEE Transactions on Applied Superconductivity, 2024, 34(4): 3601511.1-3601511.11. -

 下载:
下载:


 点击查看大图
点击查看大图

计量
- 文章访问数: 578
- HTML全文浏览量: 285
- PDF下载量: 91
- 被引次数: 0