

Fault Diagnosis of Suspended Electromagnet Based on Current Change Rate Increment
-
摘要:
为提高复杂工况下悬浮电磁铁线圈故障诊断的准确性,基于故障前、后电流特性变化,考虑温度、加减载、气隙扰动等因素的影响,提出一种基于周期内电流变化率增量的电磁铁线圈故障诊断方法. 通过建立两电平控制下电磁铁线圈输出电流变化率增量的数学模型,分析得到电流变化特性,明确电磁铁线圈匝间短路是电流变化率增量异常的本质因素,即可通过检测电流变化率增量变化来作为故障判断条件;针对间隙变化导致电流变化率增量改变触发误诊断的问题,采用最小二乘法求解实际间隙与正常状态下电量变化率增量的关系式,建立查找表,从而根据间隙变化来实时调整电流变化率增量阈值. 经过仿真和实验验证:该算法适用于磁浮列车的各种工况,鲁棒性强;在线圈短路比5%时,故障诊断准确率高达97%,灵敏度高;能够在一个基波周期内完成故障诊断,诊断速度快.
Abstract:To improve the accuracy of fault diagnosis for suspended electromagnet coils under complex operating conditions, a fault diagnosis method for electromagnet coils based on the increment of current change rate within a cycle was proposed based on the changes in current characteristics before and after the failure, taking into account the effects of temperature, load variation, and air gap disturbances. By establishing a mathematical model for the increment of the electromagnet coil’s output current change rate under two-level control, the current variation characteristics were analyzed. It was clarified that an interturn short circuit in the electromagnet coil was the fundamental cause of abnormal current change rate increment, making it feasible to use the variation in current change rate increment as a criterion for fault detection. Moreover, to address the issue of false diagnoses triggered by changes in the air gap that affected the current change rate increment, the least squares method was used to derive the relationship between the actual air gap and the current change rate increment under normal conditions. A lookup table was then established to dynamically adjust the threshold of the current change rate increment in real time based on air gap variations. Simulation and experimental results verify that the proposed algorithm is suitable for various operating conditions of maglev trains, demonstrating strong robustness. When the coil’s short circuit ratio is less than 5%, the fault diagnosis accuracy reaches as high as 97%, with high sensitivity. Moreover, the algorithm is capable of completing fault diagnosis within a single fundamental cycle, ensuring rapid detection.
-
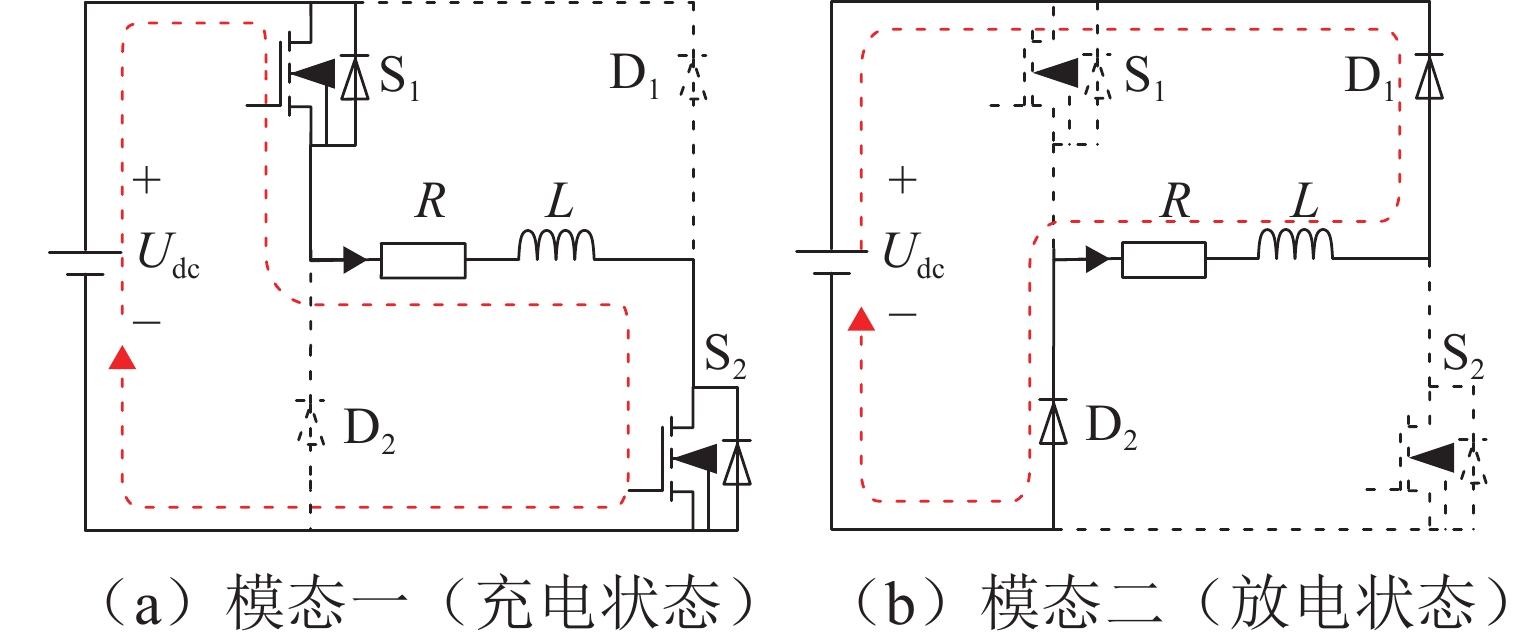
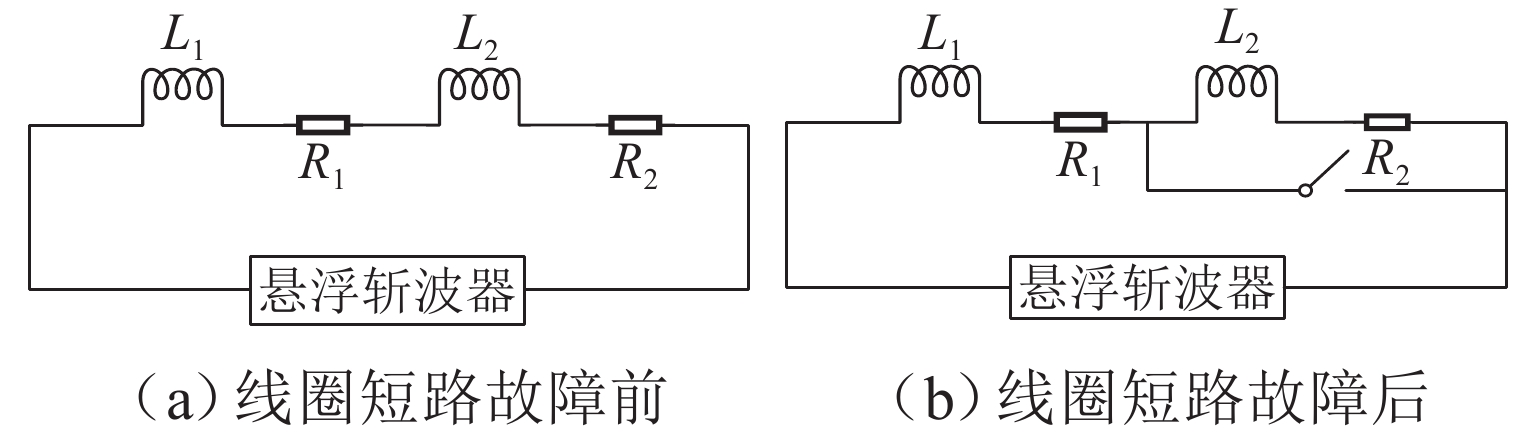
图 1 正常状态下不同开关状态的电路模态
Figure 1. Circuit modes of different switching states under normal condition
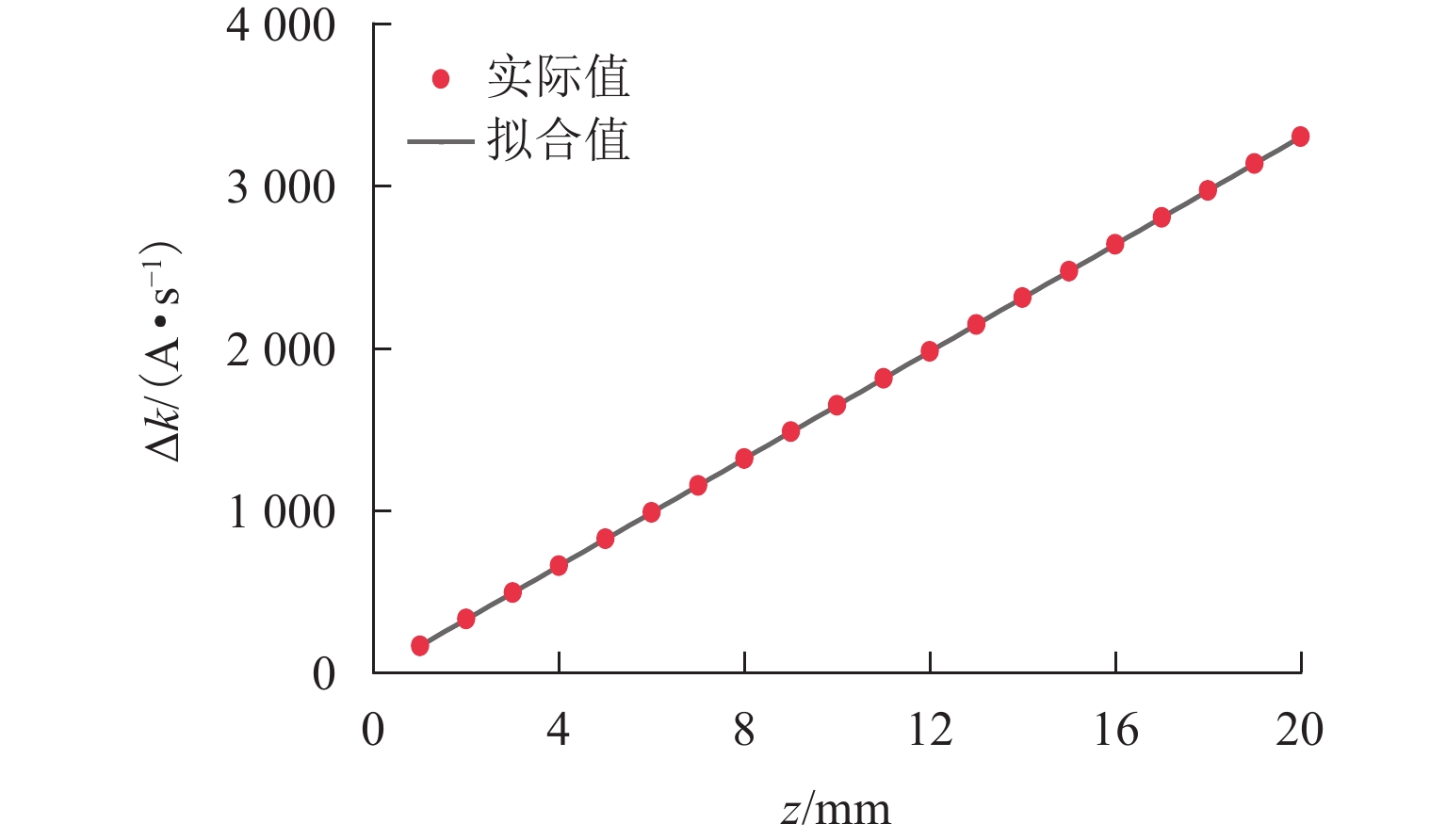
图 3 正常状态下电流变化率增量拟合曲线
Figure 3. Fitting curve of current change rate increment under normal condition
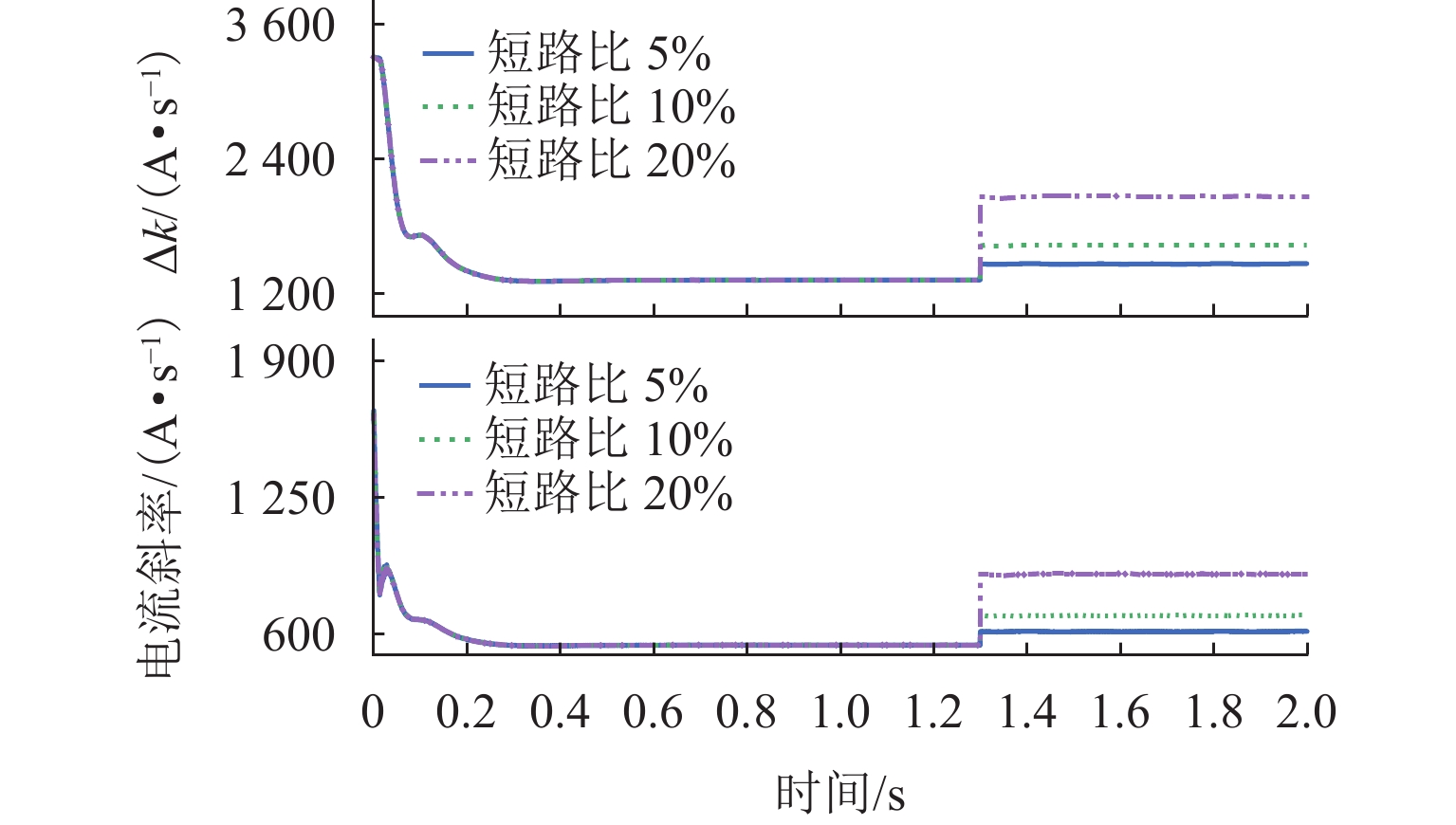
图 4 不同短路比下故障特征对比曲线
Figure 4. Fault characteristic comparison curves under different short circuit ratios
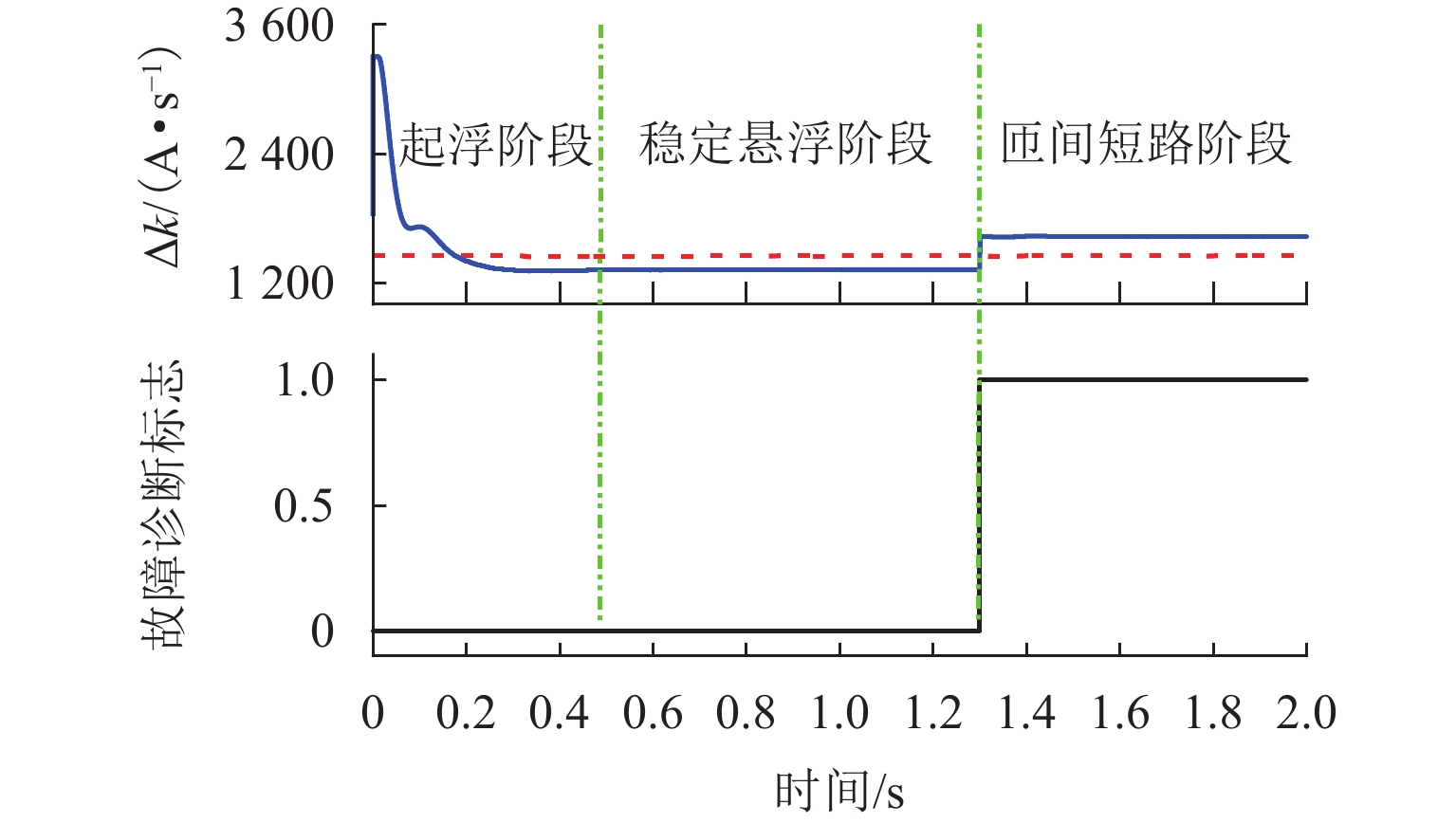
图 6 电磁铁匝间短路故障仿真结果
Figure 6. Simulation results of electromagnet’s interturn short circuit fault
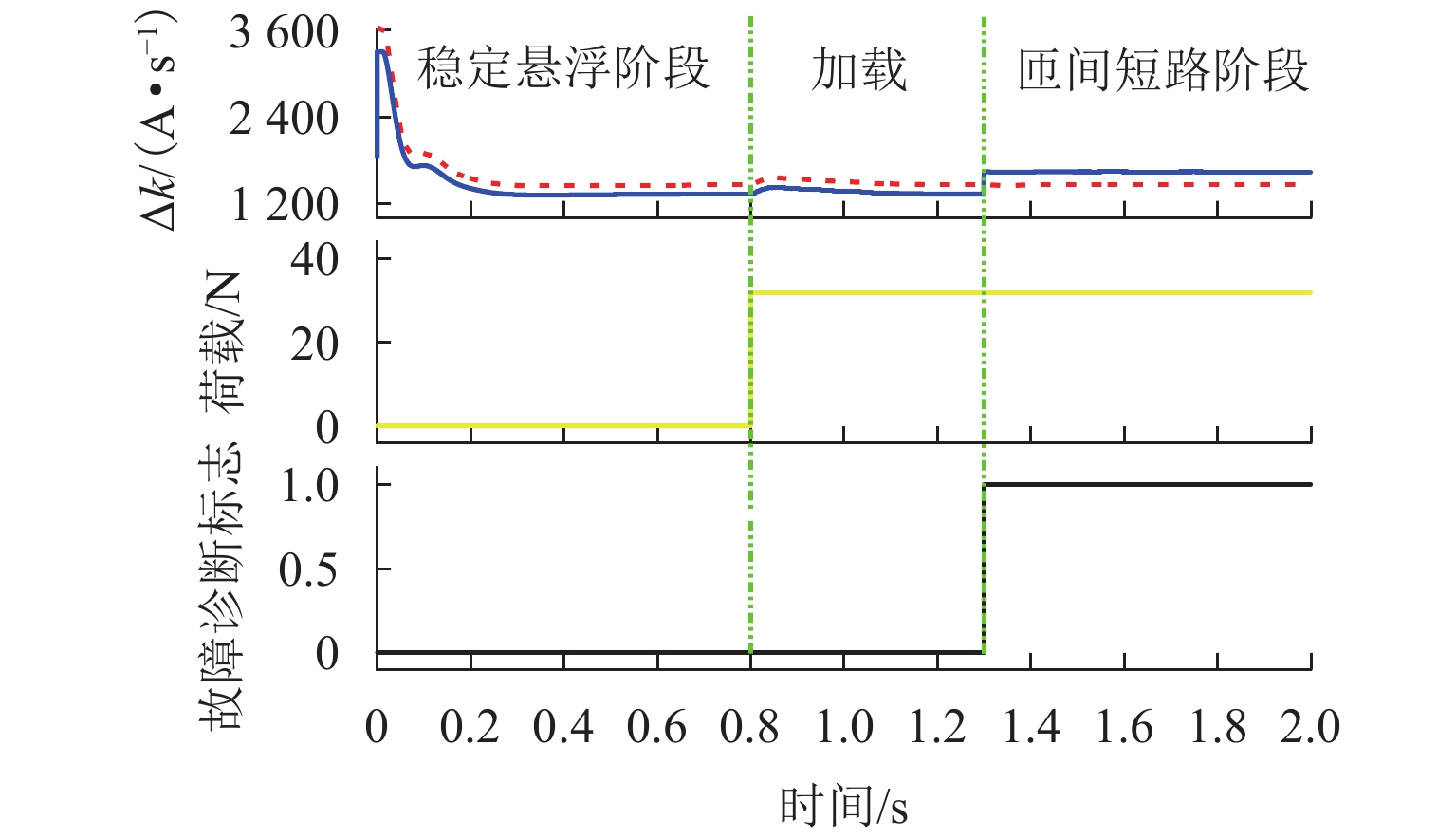
图 7 电磁铁线圈匝间短路加载仿真
Figure 7. Simulation of electromagnet coil’s interturn short circuit loading
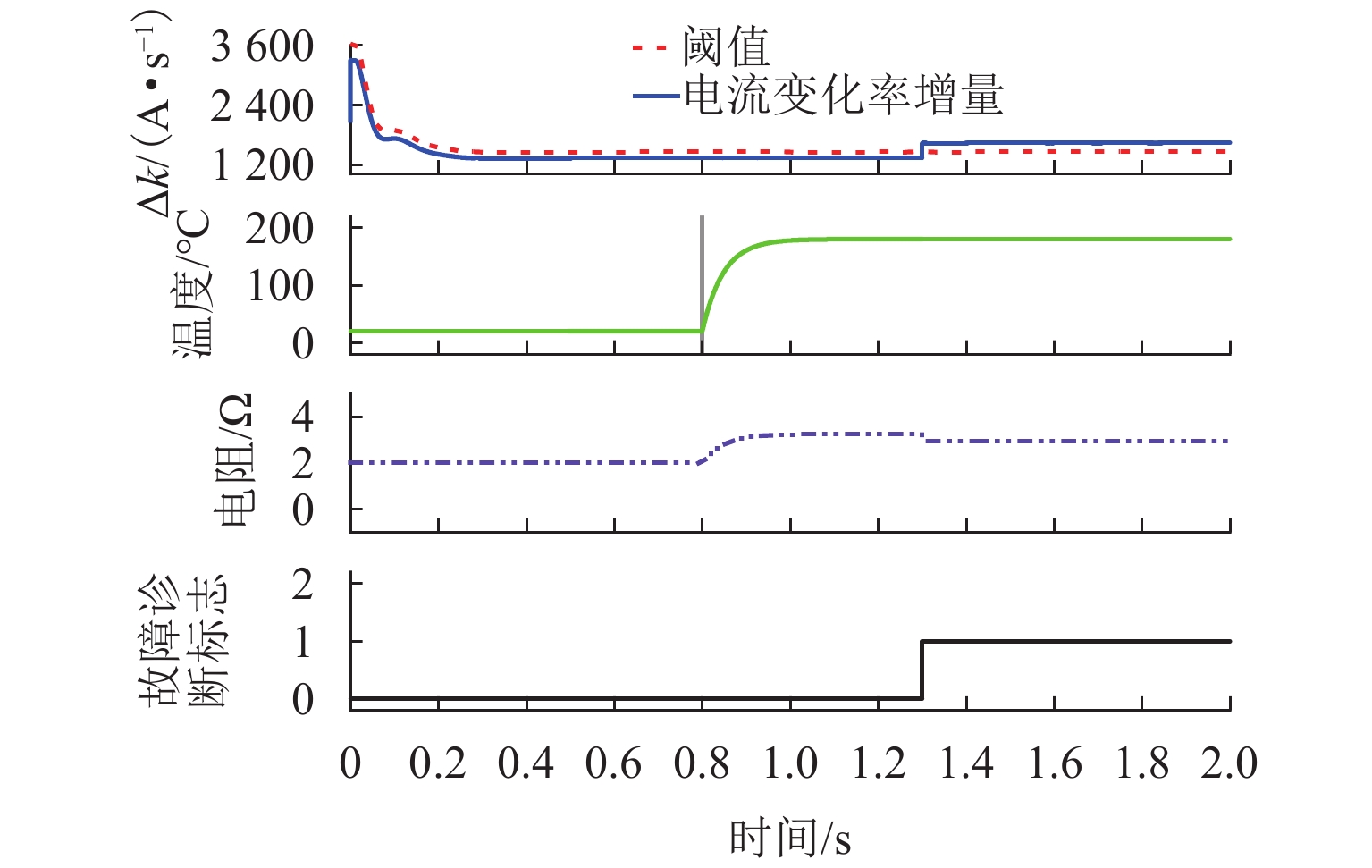
图 8 电磁铁线圈匝间短路温度变化仿真
Figure 8. Simulation of temperature variation during electromagnet coil’s interturn short circuit
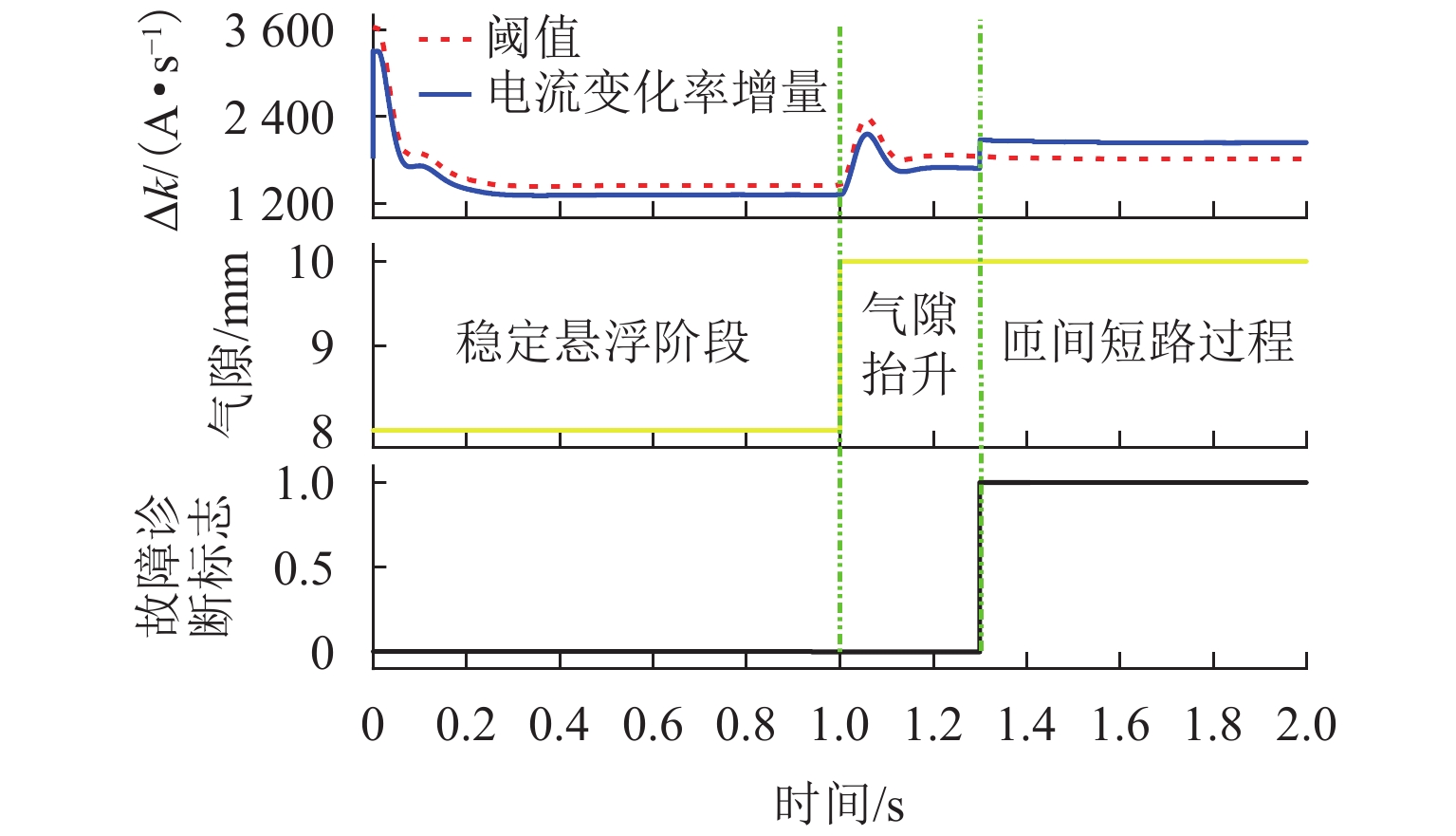
图 9 电磁铁线圈匝间短路间隙扰动仿真
Figure 9. Simulation of air gap disturbance during electromagnet coil’s interturn short circuit
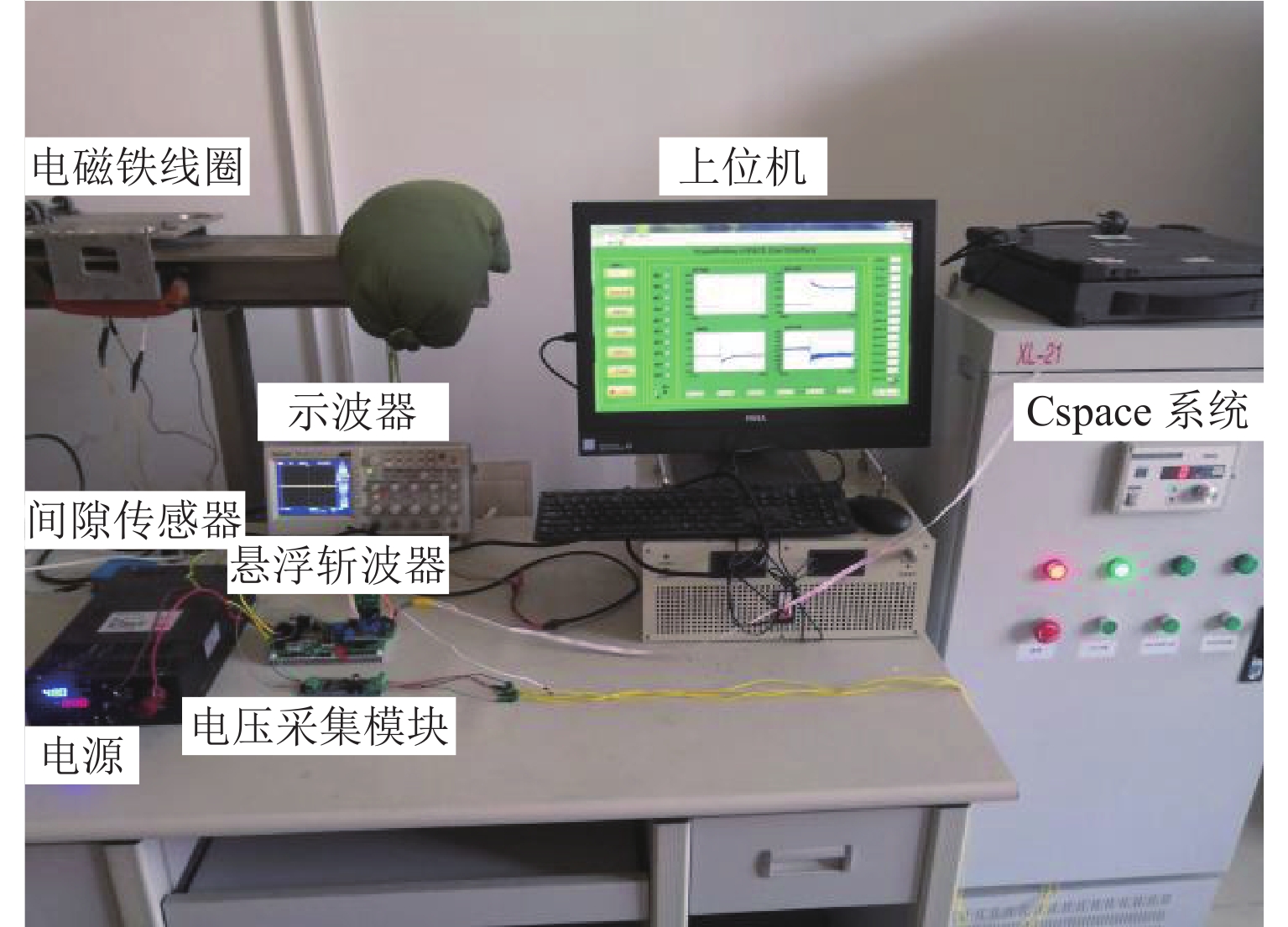
图 10 基于CSpace悬浮控制单元故障诊断实验平台
Figure 10. Fault diagnosis experiment platform based on CSpace suspension control unit
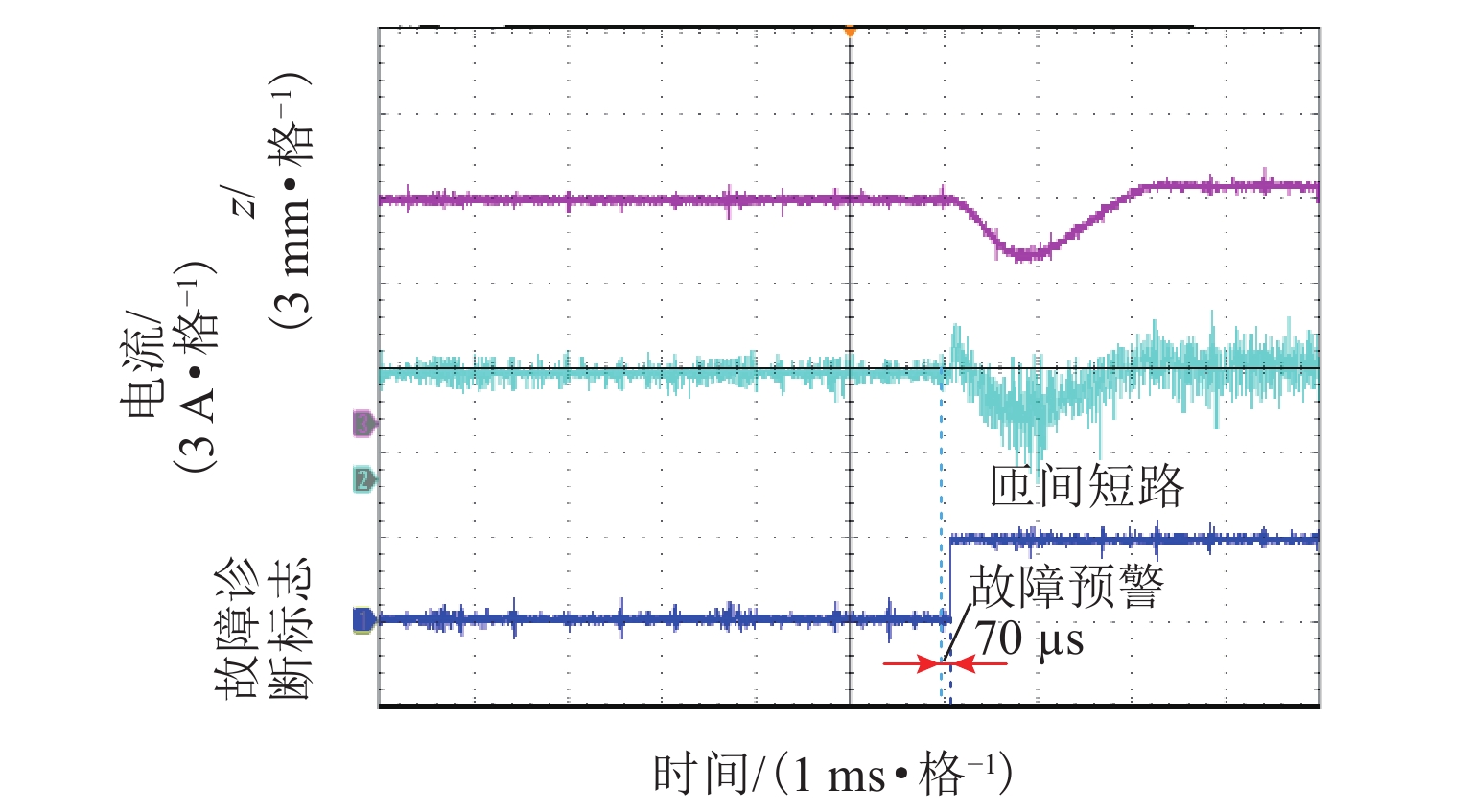
图 12 电磁铁线圈匝间短路实验波形
Figure 12. Interturn short circuit test waveforms of electromagnet coil
表 1 诊断性能对比
Table 1. Comparison of diagnosis performance
% 诊断方法 准确诊断率 误报率 漏诊率 电流斜率 90 2 8 Δk 97 1 2  下载: 导出CSV
下载: 导出CSV
-
[1] KWONG R H, YONGE-MALLO D L. Fault diagnosis in discrete-event systems: incomplete models and learning[J]. IEEE Transactions on Systems, Man, and Cybernetics, Part B (Cybernetics), 2011, 41(1): 118-130. doi: 10.1109/TSMCB.2010.2047257 [2] LEI Y G, JIA F, LIN J, et al. An intelligent fault diagnosis method using unsupervised feature learning towards mechanical big data[J]. IEEE Transactions on Industrial Electronics, 2016, 63(5): 3137-3147. doi: 10.1109/TIE.2016.2519325 [3] BOBTSOV A A, PYRKIN A A, ORTEGA R S, et al. A state observer for sensorless control of magnetic levitation systems[J]. Automatica, 2018, 97: 263-270. doi: 10.1016/j.automatica.2018.08.004 [4] 高彩霞,冯凌云,党建军. 基于双级PNN的直驱永磁同步电机匝间短路故障诊断方法[J]. 河南理工大学学报(自然科学版),2025,44(2): 116-127.GAO Caixia, FENG Lingyun, DANG Jianjun. Interturn short circuit fault diagnosis method of direct-drive permanent magnet synchronous motor based on two-stage PNN[J]. Journal of Henan Polytechnic University (Natural Science), 2025, 44(2): 116-127. [5] 吴振宇,王慧,胡存刚,等. 基于多路漏磁信号阵列的无刷直流电机匝间短路故障诊断[J]. 电工技术学报,2025,40(4): 1105-1116.WU Zhenyu, WANG Hui, HU Cungang, et al. Turn-to-turn short circuit fault diagnosis of brushless DC motor based on multiple magnetic flux leakage signal arrays[J]. Transactions of China Electrotechnical Society, 2025, 40(4): 1105-1116. [6] 阚超豪,姚骁键,齐安康,等. 三相异步电机匝间短路故障的诊断方法[J]. 电气传动,2024,54(11): 76-80.KAN Chaohao, YAO Xiaojian, QI Ankang, et al. Diagnosis method of inter-turn short circuit fault of three-phase induction motor[J]. Electric Drive, 2024, 54(11): 76-80. [7] 段汝鹏. 双三相永磁同步电机匝间短路故障诊断与容错控制研究[D]. 杭州:浙江大学,2024. [8] THIBEAULT N M, SMITH R S. Magnetic bearing measurement configurations and associated robustness and performance limitations[J]. Journal of Dynamic Systems, Measurement, and Control, 2002, 124(4): 589-598. doi: 10.1115/1.1514671 [9] VISCHER D, BLEULER H. Self-sensing active magnetic levitation[J]. IEEE Transactions on Magnetics, 1993, 29(2): 1276-1281. doi: 10.1109/20.250632 [10] TANG M, ZHU C S. New method of position estimation for self-sensing active magnetic bearings based on artificial neural network[C]//2010 International Conference on Electrical and Control Engineering. Wuhan: IEEE, 2010: 1355-1358. [11] TABREZ M, BAKHSH F I, HASSAN M, et al. A comparative simulation study of different sensorless permanent magnet synchronous motor drives using neural network and fuzzy logic[J]. Journal of Intelligent & Fuzzy Systems, 2018, 35(5): 5177-5184. [12] LONG Z Q, LI Y, HE G. Research on electromagnet fault diagnosis technology of suspension control system of maglev train[J]. Control and Decision, 2010, 25(7): 1004-1009. [13] WANG P, LONG Z Q, XU Y S. Component-level fault detection for suspension system of maglev trains based on autocorrelation length and stable kernel representation[J]. IEEE Transactions on Vehicular Technology, 2021, 70(8): 7594-7604. doi: 10.1109/TVT.2021.3096732 [14] LI H H, WU L J, SU Z Z, et al. Detection of inter-turn short circuit fault of active magnetic bearing based on least mean square algorithm[C]//2021 24th International Conference on Electrical Machines and Systems (ICEMS). Gyeongju: IEEE, 2021: 1049-1053. [15] CHENG X, CHENG B X, LU M Q, et al. An online fault-diagnosis of electromagnetic actuator based on variation characteristics of load current[J]. Automatika, 2020, 61(1): 11-20. doi: 10.1080/00051144.2019.1654652 [16] 王志强. 高速磁浮列车悬浮系统故障诊断与容错控制研究[D]. 长沙:国防科技大学,2019. [17] YETENDJE A, SERON M M, DE DONÁ J A. Multisensor fusion fault-tolerant control of a magnetic levitation system[C]//18th Mediterranean Conference on Control and Automation. Marrakech: IEEE, 2010: 1055-1060. [18] 梁达,张昆仑,肖嵩. 考虑电流振铃特性的悬浮电磁铁等效电路模型[J]. 西南交通大学学报,2022,57(3): 588-596. doi: 10.3969/j.issn.0258-2724.20210886LIANG Da, ZHANG Kunlun, XIAO Song. Equivalent circuit model of suspension electromagnet with current ringing characteristics[J]. Journal of Southwest Jiaotong University, 2022, 57(3): 588-596. doi: 10.3969/j.issn.0258-2724.20210886 [19] 孙超,张昆仑. 基于遗传算法的悬浮电磁铁磁热耦合参数优化[J]. 电气工程学报,2024,19(2): 344-352.SUN Chao, ZHANG Kunlun. Optimization of magnetothermal coupling parameters of suspension electromagnet based on genetic algorithm[J]. Journal of Electrical Engineering, 2024, 19(2): 344-352. [20] 朱瑞雨,崔江. 一种航空发电机电枢绕组匝间短路故障诊断技术[J]. 电机与控制应用,2025,52(1): 22-35. doi: 10.12177/emca.2024.147ZHU Ruiyu, CUI Jiang. A fault diagnosis technique for armature winding inter-turn short circuit in aerospace generators[J]. Electric Machines & Control Application, 2025, 52(1): 22-35. doi: 10.12177/emca.2024.147 [21] 马杰,都业林,金涛,等. 动车组牵引电机匝间短路故障诊断方法研究[J]. 铁道机车车辆,2025,45(1): 144-151. doi: 10.3969/j.issn.1008-7842.2025.01.20MA Jie, DU Yelin, JIN Tao, et al. Research on fault diagnosis method for EMU traction motor inter-turn short circuit fault[J]. Railway Locomotive & Car, 2025, 45(1): 144-151. doi: 10.3969/j.issn.1008-7842.2025.01.20 [22] 王雅宁. 基于反电动势残差的永磁同步电机匝间短路故障检测与定位[D]. 西安:西安理工大学,2024. [23] LUO P E, YIN Z G, ZHANG Z, et al. Diversified diagnosis strategy for PMSM inter-turn short-circuit fault via novel sliding mode observer[J]. IEEE Transactions on Power Electronics, 2024, 39(4): 4149-4159. doi: 10.1109/TPEL.2024.3352077 [24] NIU G, DONG X, CHEN Y J. Motor fault diagnostics based on current signatures: a review[J]. IEEE Transactions on Instrumentation and Measurement, 2023, 72: 3520919.1-3520919.19. [25] 刘君,李中祥,李堃,等. 变压器绕组短路故障多特征融合诊断[J]. 湖南大学学报(自然科学版),2023,50(4): 210-216.LIU Jun, LI Zhongxiang, LI Kun, et al. Multi-feature fusion detection method for interturn short-circuit faults of transformers[J]. Journal of Hunan University (Natural Sciences), 2023, 50(4): 210-216. -

 下载:
下载:


 点击查看大图
点击查看大图
计量
- 文章访问数: 232
- HTML全文浏览量: 101
- PDF下载量: 33
- 被引次数: 0