

Motion Decoupling and Dynamic Response of Permanent Magnet Maglev Bogie
-
摘要:
针对永磁磁浮“红轨”列车转向架在悬浮与导向性能上的不足,提出一种新型转向架方案并开展动力学研究. 首先,采用有限元法分析Halbach阵列磁场与磁力特性,明确永磁侧偏对导向性能及运动解耦对稳定悬浮的影响机制;其次,详细阐述新型转向架结构设计,构建车辆系统动力学模型,重点研究车辆直线运行及通过R50小半径曲线时转向架关键部件的动力学响应;最后,探究横向轮自由间隙与刚度对转向架冲击振动的影响. 研究结果表明:当横向轮自由间隙设为0,刚度值设为6 × 106 N/m时,转向架冲击振动得到有效抑制;车辆过曲线时,转向架在永磁侧偏力作用下,以横向轮紧贴曲线内侧来平衡离心力,与传统轨道车辆动力学特性明显不同;在运行速度≤60 km/h工况下,空载(AW0)状态时车辆的横向与垂向平稳性指标均优于超载(AW3)状态,且两者平稳性指标均控制在2.5以内.
Abstract:To address levitation and guidance performance deficiencies in permanent magnet maglev “Red Rail” train bogies, an innovative bogie scheme was proposed, and dynamic analyses were performed. First, the finite element method was used to analyze the Halbach array’s magnetic field and force characteristics and clarify the influence of lateral offset of the permanent magnet on guidance performance and that of motion decoupling on stable levitation. Next, the innovative bogie’s structural design was detailed, and a vehicle system dynamics model was built to investigate the dynamic responses of key bogie components during straight-line operation and passing through a 50-m radius curve (R50). Finally, the impact of free gaps and stiffness of lateral wheels on bogie impact vibration was explored. The results show that when the free gap of lateral wheels is 0, and the stiffness is 6 × 106 N/m, bogie impact vibration is effectively suppressed. When the train passes through a curve, the bogie balances centrifugal force by keeping lateral wheels in close contact with the inner curve side under the lateral offset force of a permanent magnet, which is distinct from traditional rail vehicle dynamics. When the speed is no more than 60 km/h, the lateral and vertical ride quality indices of no-load (AW0) vehicles outperform those in overload (AW3), with both indices controlled below 2.5.
-
Key words:
- permanent magnet /
- bogie /
- magnetic levitation /
- lateral offset of permanent magnet /
- dynamic response
-

图 2 Halbach永磁阵列结构及有限元模型
Figure 2. Structure of Halbach permanent magnet array and its finite element model
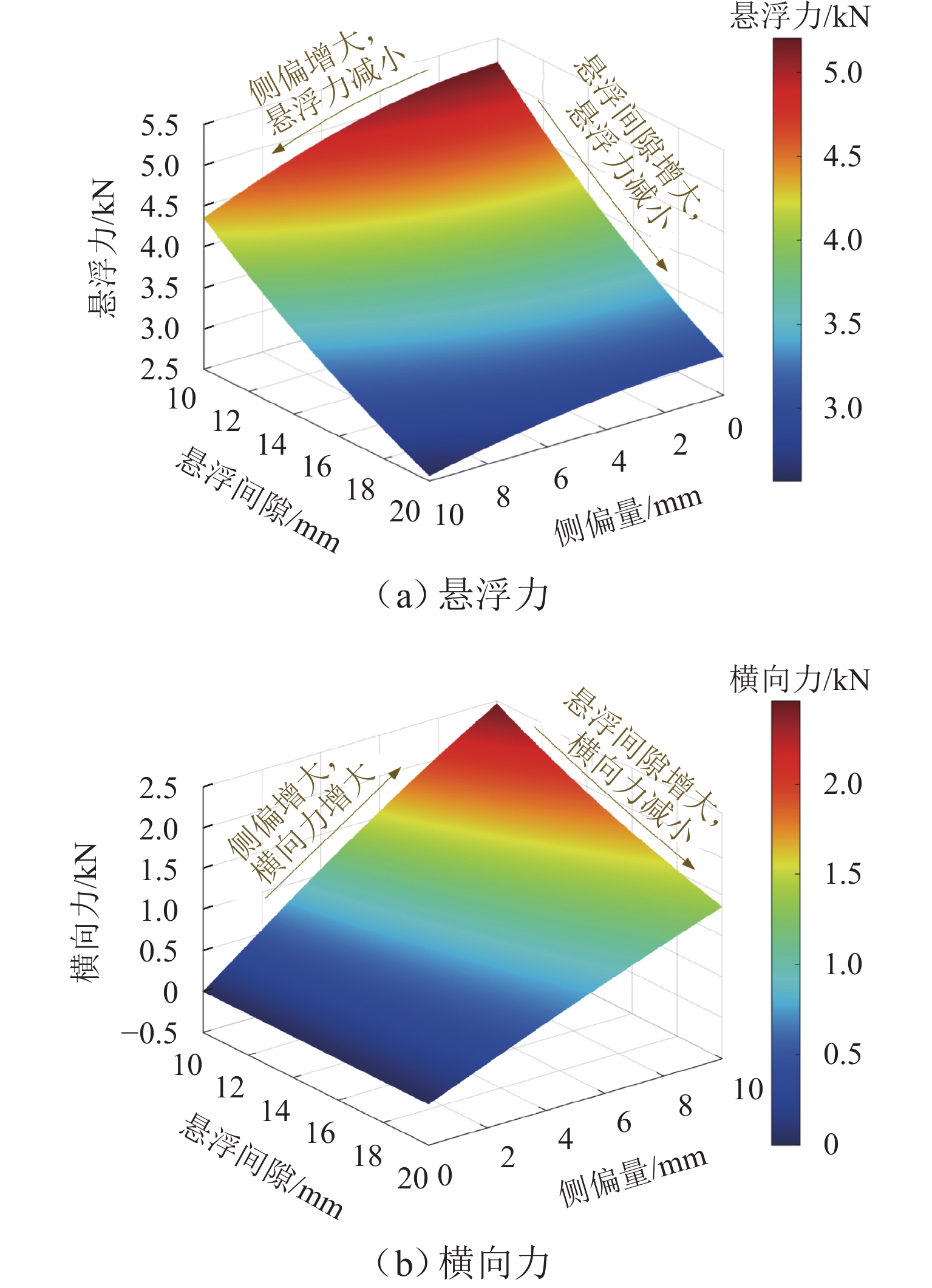
图 4 悬浮力、横向力随悬浮间隙与侧偏量变化
Figure 4. Variation of levitation force and lateral force with levitation gap and lateral offset
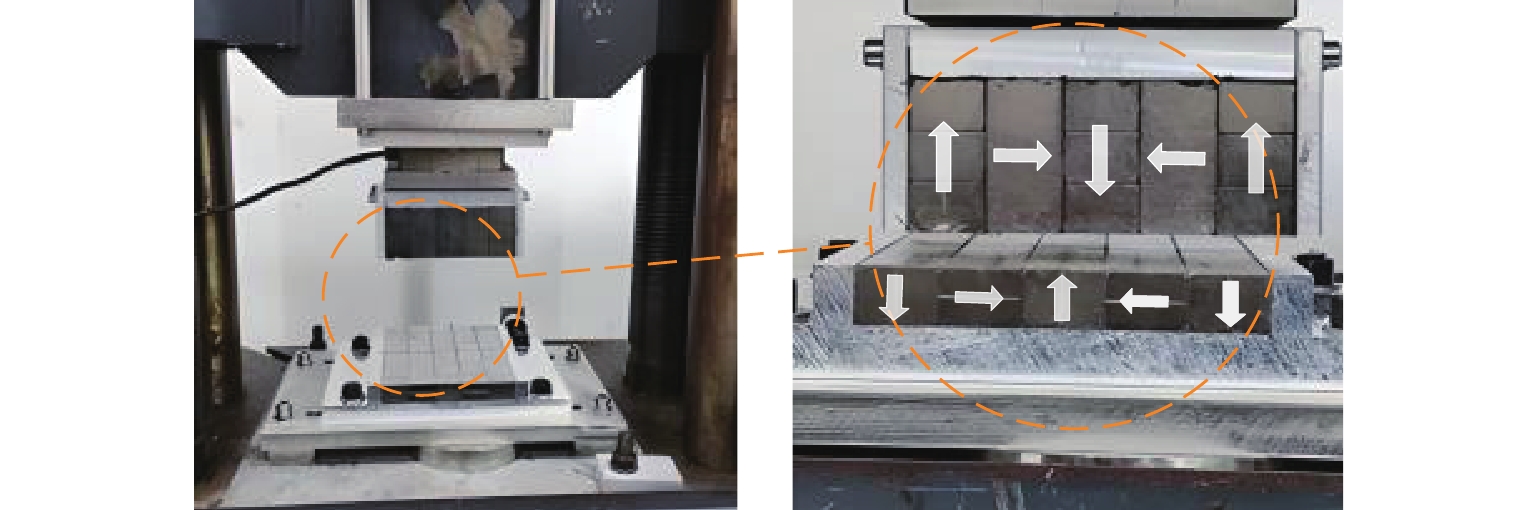
图 5 单点等比例Halbach阵列磁力测试平台
Figure 5. Magnetic force testing platform of single-point equal-proportion Halbach array
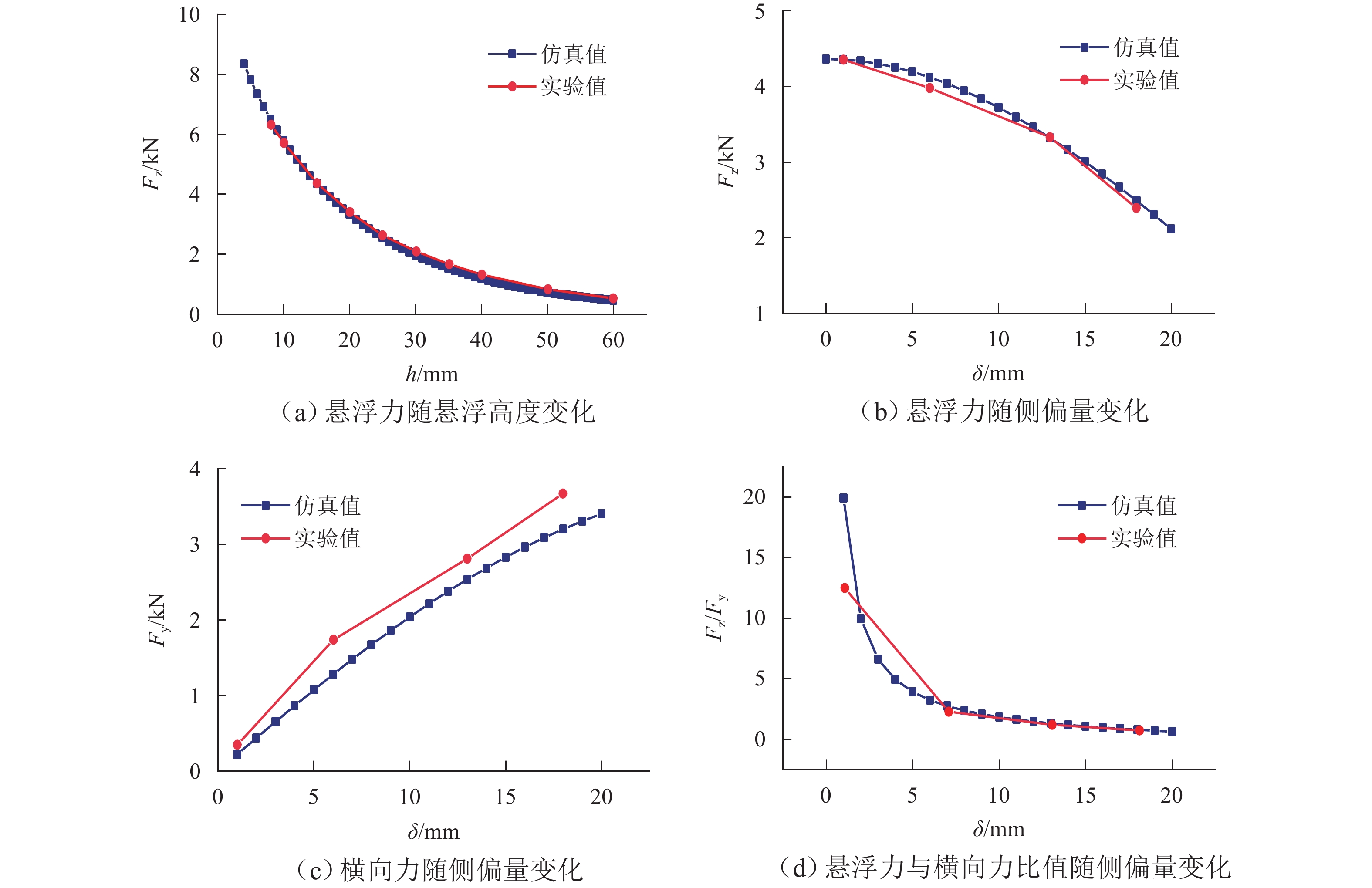
图 6 单点等比例磁体磁力测试结果
Figure 6. Magnetic force testing results of single-point equal-proportion magnet
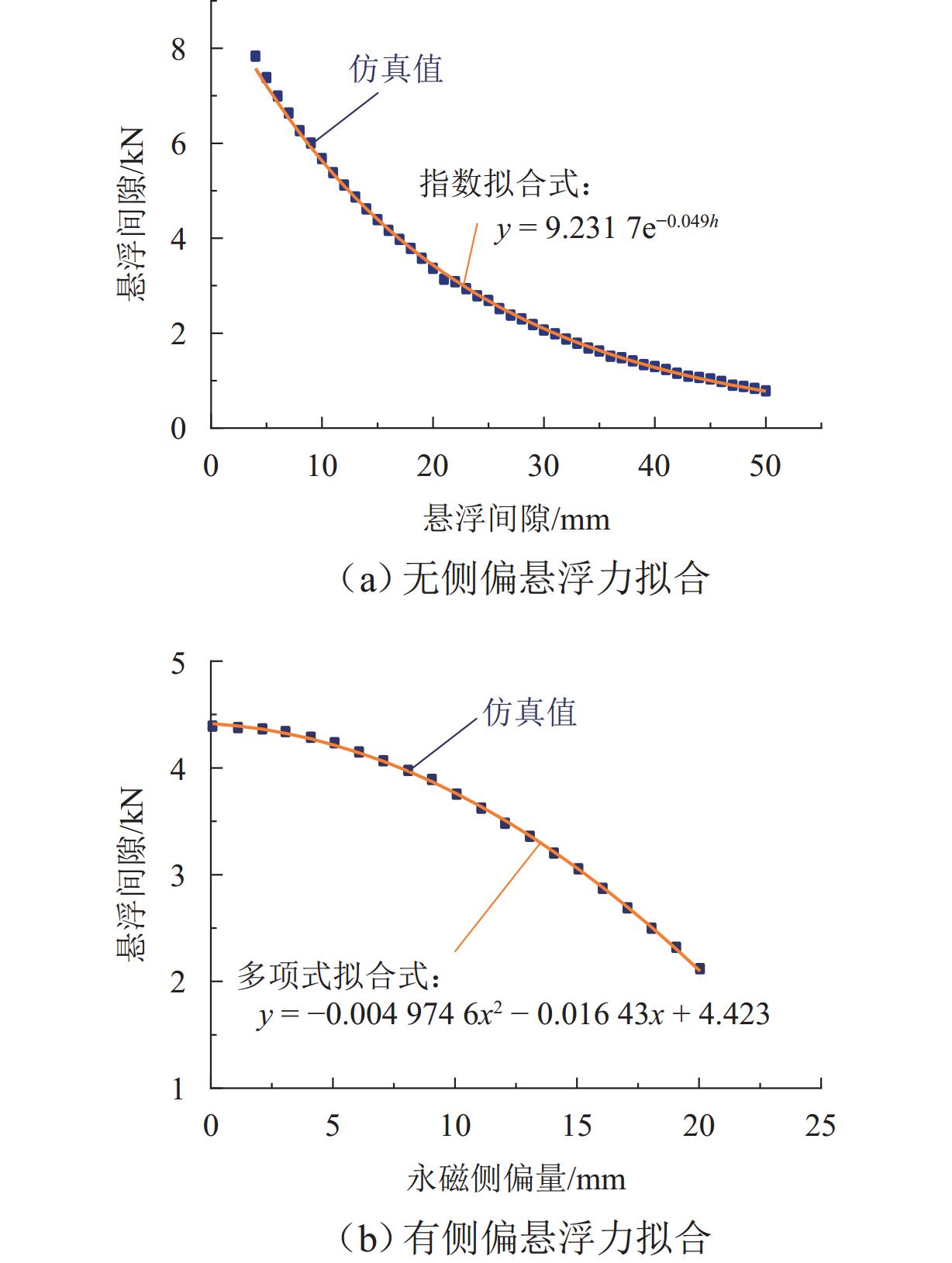
图 8 无侧偏/有侧偏时悬浮力拟合曲线
Figure 8. Fitting curves of levitation force without/with lateral offset
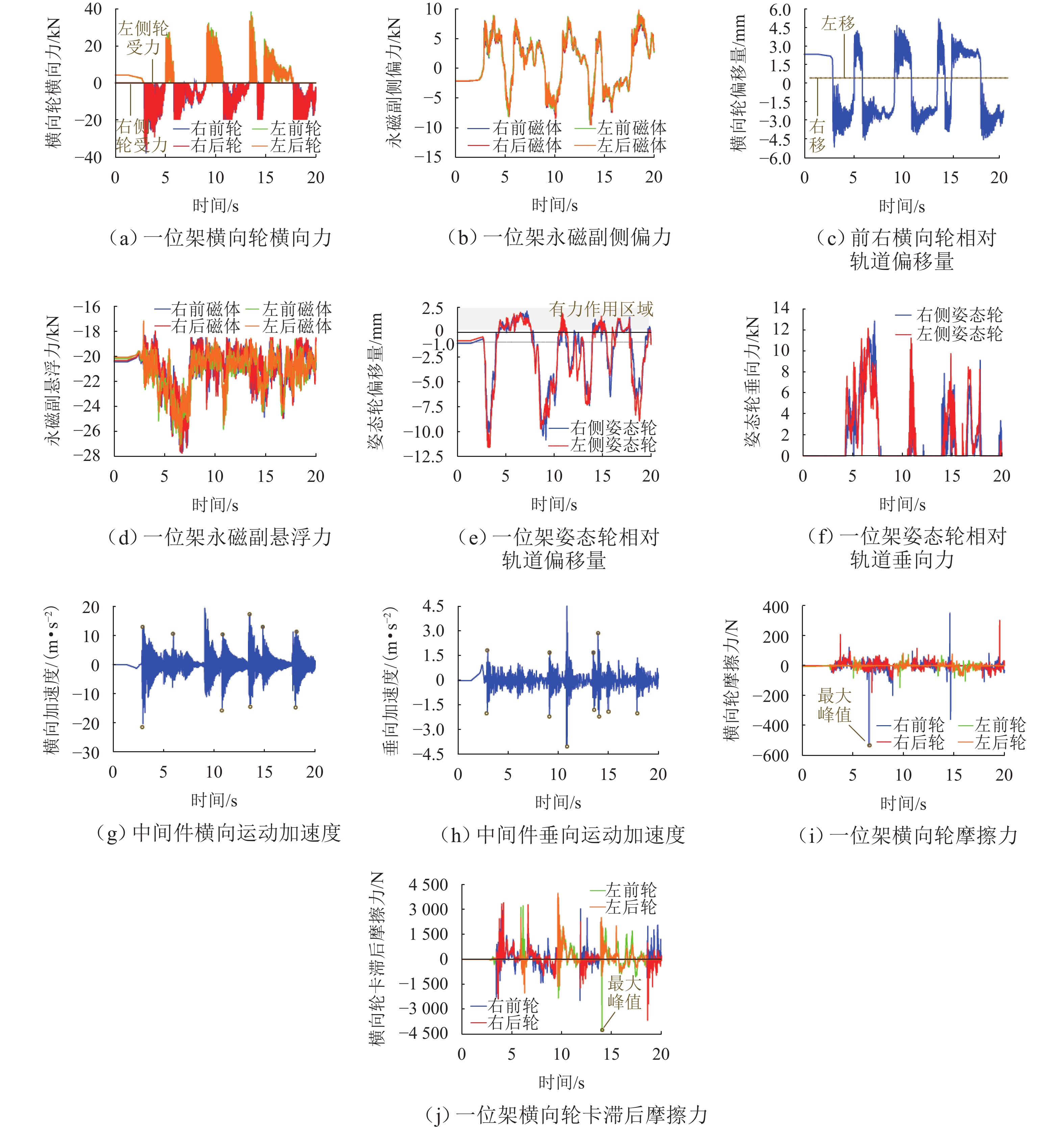
图 10 转向架直线运行的动力学响应结果
Figure 10. Dynamic response results of bogie during straight-line operation
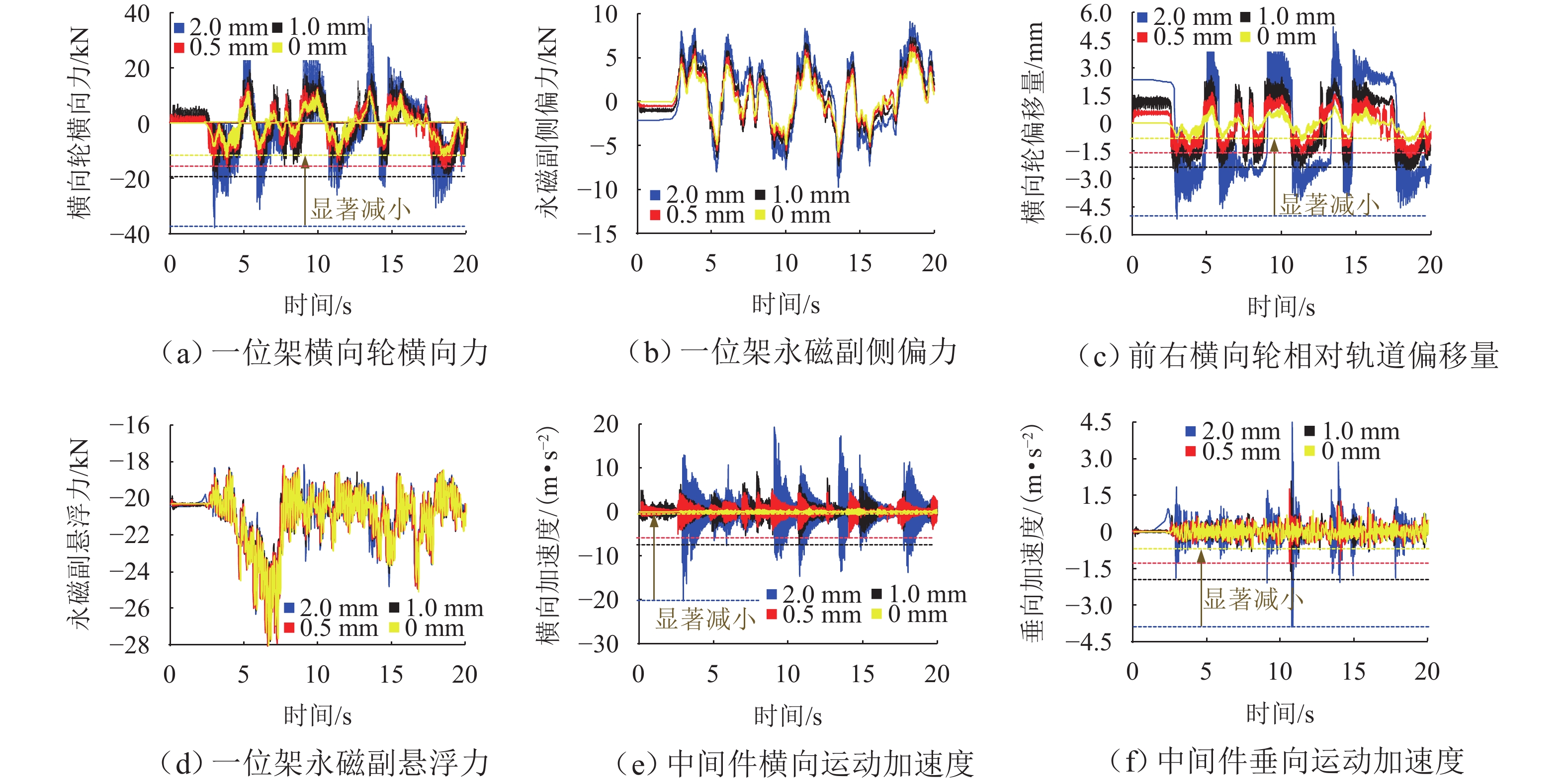
图 11 不同横向轮自由间隙下直线运行动力学响应结果
Figure 11. Dynamic response results of bogie during straight-line operation under different free gaps of lateral wheel
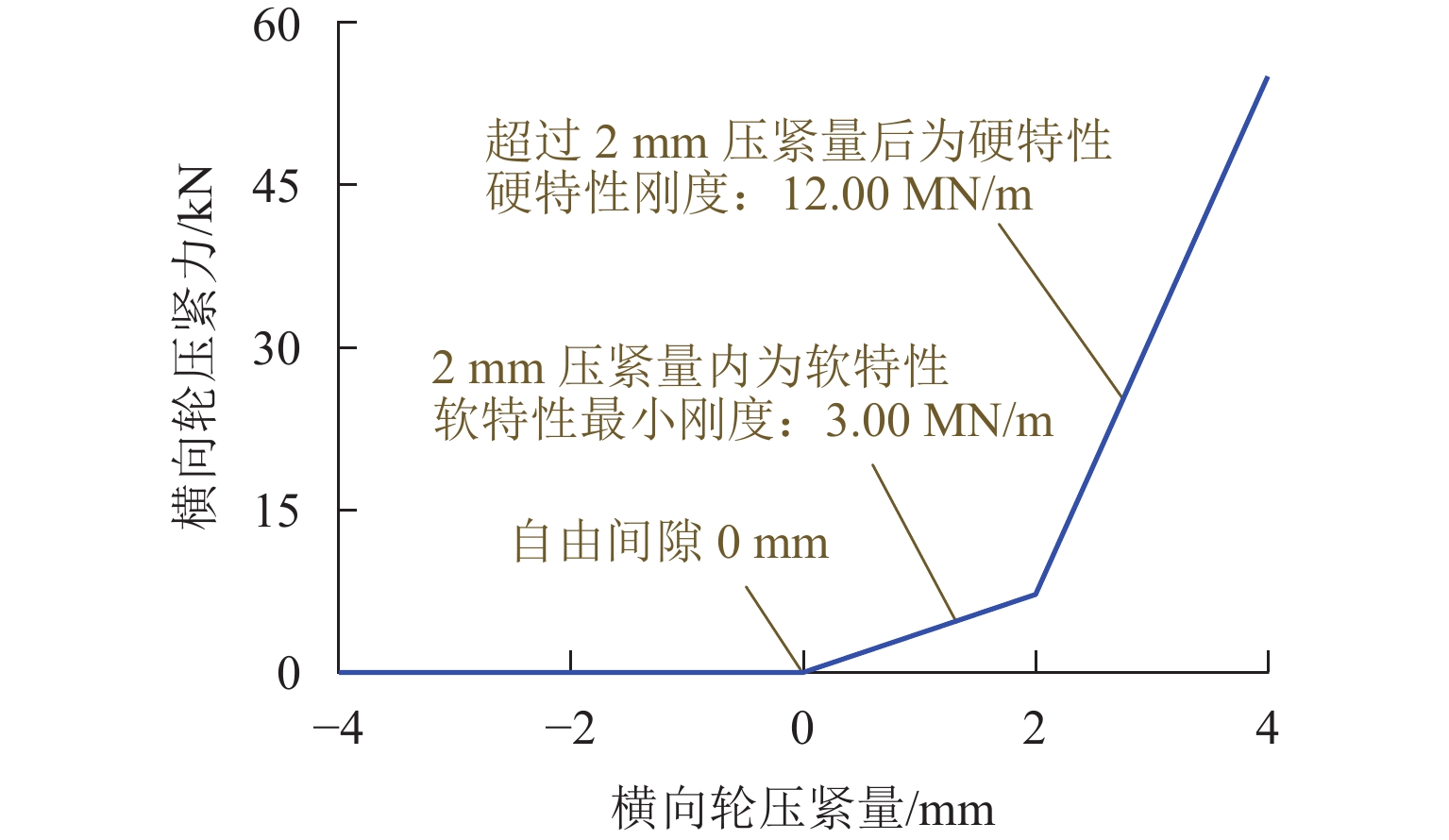
图 12 零自由间隙下具有二级刚度的横向轮模型
Figure 12. Lateral wheel model with secondary stiffness under zero free gap
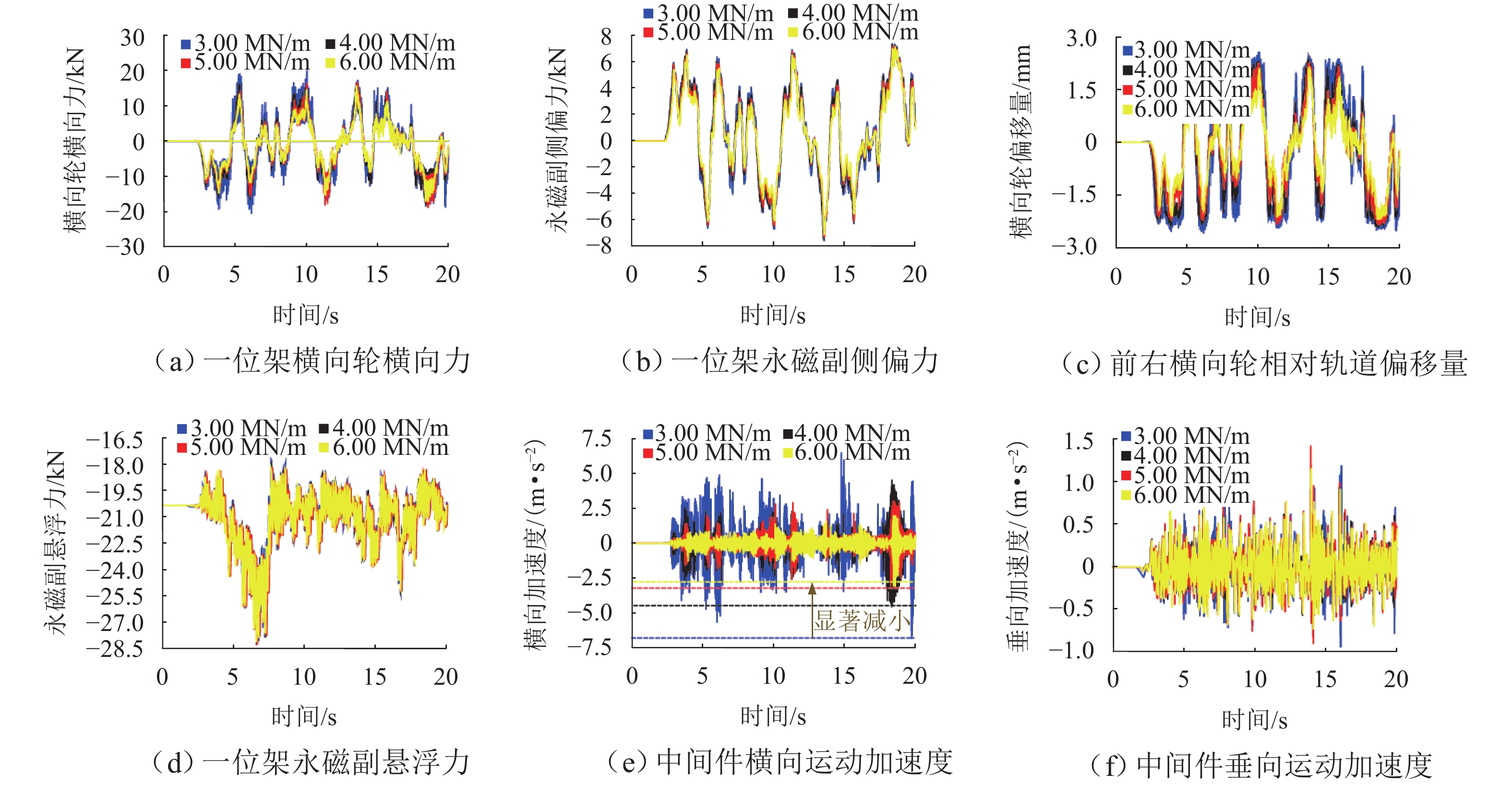
图 13 不同横向轮自由间隙下直线运行动力学响应结果
Figure 13. Dynamic response results of bogie during straight-line operation under different free gaps of lateral wheel
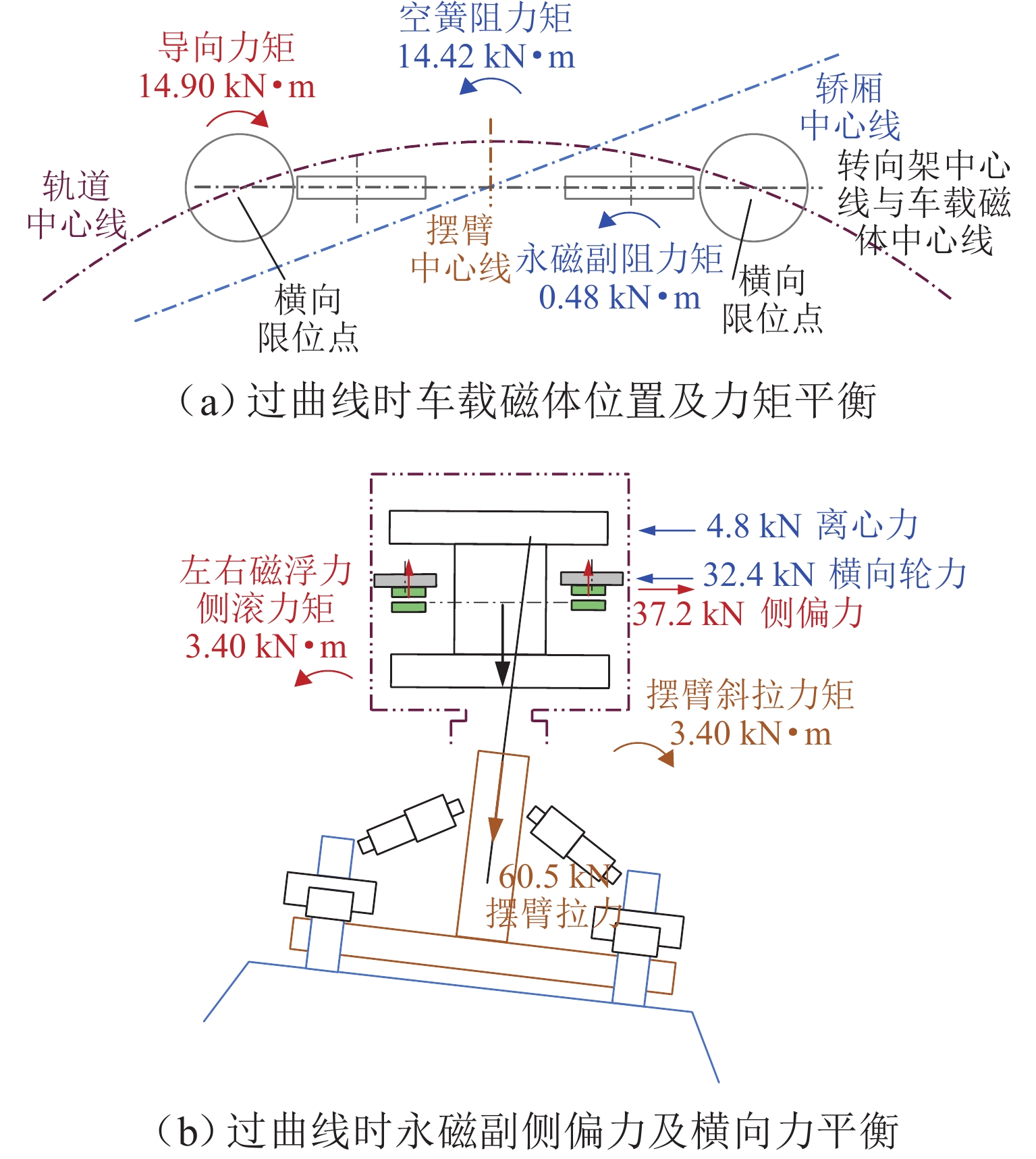
图 14 通过R50曲线时车载磁体力矩平衡及横向力平衡示意
Figure 14. Balance of on-board magnetic force torque and lateral force when passing through R50 curve
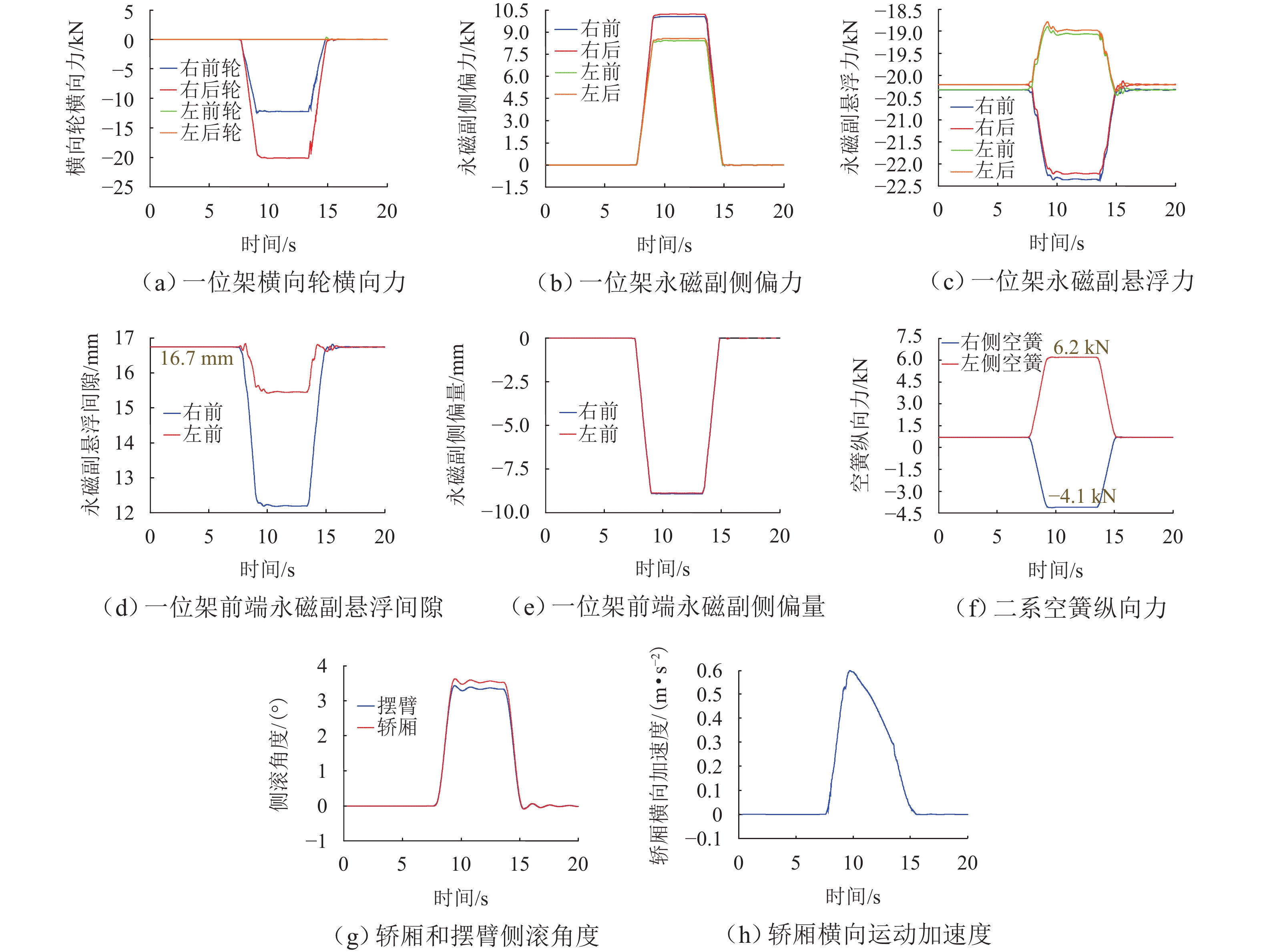
图 15 转向架通过R50曲线时的动力学响应结果
Figure 15. Dynamic response results of bogie when passing through R50 curve
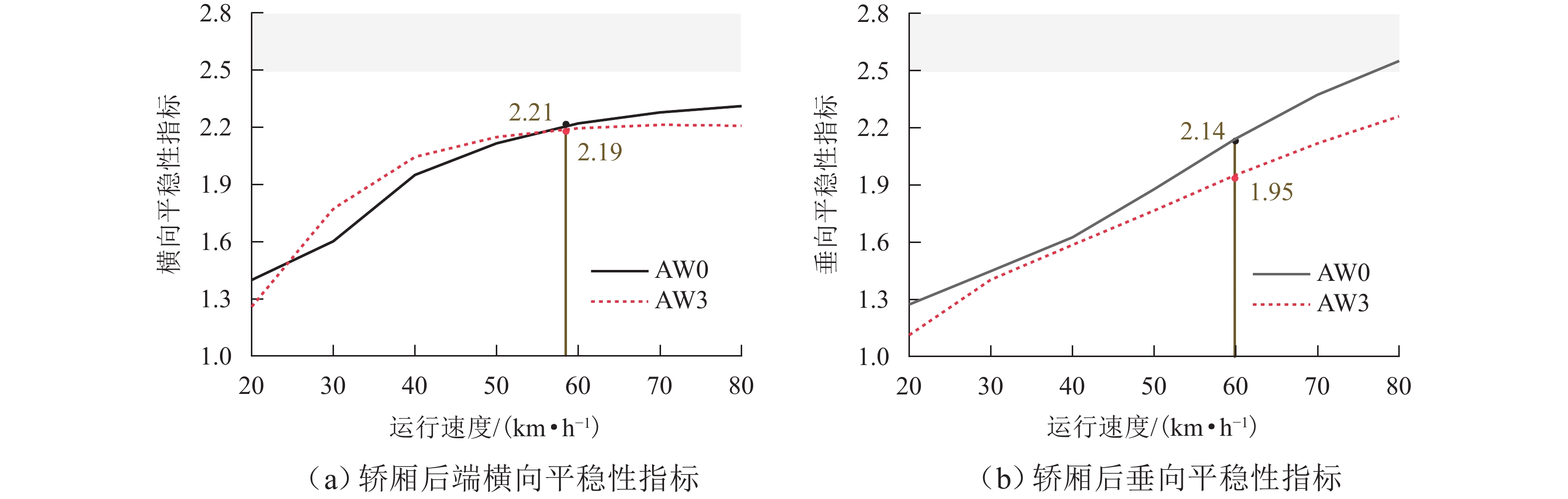
图 16 轿厢后端横向与垂向平稳性指标
Figure 16. Transverse and vertical ride comfort index at rear of train carriage
表 1 轮胎式与2种永磁磁浮转向架技术对比
Table 1. Technical comparison among tire-type and two types of permanent magnet maglev bogies
类型 承载 导向/抗侧滚 牵引 制动 轮胎式 充气轮胎 横向轮与稳定轮 旋转电机 电制动与机械制动 兴国线 永磁副 导向/稳定轮 直线电机 电制动与机械制动 本文研究 永磁副 横向轮与姿态轮 直线电机 机械制动  下载: 导出CSV
下载: 导出CSV
表 2 钕铁硼N45 和 N52M永磁材料参数
Table 2. Parameters of NdFeB N45 and N52M permanent magnet materials
牌号 矫顽力/(kA•m−1) 相对磁导率 剩余磁感应强度/T N45 955.20 1.14 1.37 N52M 1114.40 1.04 1.46
下载: 导出CSV
表 3 不同悬浮间隙下永磁磁浮系统的垂向刚度
Table 3. Vertical stiffness of permanent magnet maglev system with different levitation gaps
悬浮间
隙/mm单点载
荷/kN响应主
频/Hz悬浮刚度/
(MN·m−1)20.10 5.5 3.6 0.28 16.40 6.8 3.9 0.42 13.90 8.2 4.4 0.62 12.00 9.6 4.6 0.83 11.40 10.1 5.0 1.02 8.70 13.7 5.5 1.66
下载: 导出CSV
表 5 AW0状态不同侧偏量下悬浮间隙、侧偏力及修正系数
Table 5. Levitation gap, lateral offset force, and correction coefficient under different lateral offsets in AW0 condition
侧偏量/mm 悬浮间隙/mm 侧偏力/N 修正系数/% 0 22.81 0 100.00 −5 21.86 2988.4 96.15 −10 19.60 7222.4 86.05 −15 15.51 14201.4 70.45 −20 8.09 27106.5 49.40
下载: 导出CSV
表 6 AW3状态不同侧偏量下悬浮间隙、侧偏力及修正系数
Table 6. Levitation gap, lateral offset force, and correction coefficient under different lateral offsets in AW3 condition
侧偏量/mm 悬浮间隙/mm 侧偏力/N 修正系数/% 0 16.74 0 100.00 −5 15.78 4659.2 96.15 −10 13.52 10564.1 86.05 −15 9.44 19213.9 70.45 −17 7.05 24008.7 62.67 −18 5.63 26829.5 58.45 −19 4.16 29848.3 54.01 −20 2.03 33764.7 49.40
下载: 导出CSV
-
[1] 赵川,孙凤,裴文哲,等. 永磁悬浮技术的实现机理与发展现状[J]. 机械工程学报,2023,59(17): 189-207. doi: 10.3901/JME.2023.17.189ZHAO Chuan, SUN Feng, PEI Wenzhe, et al. Realization mechanism and development of permanent magnetic levitation: a review[J]. Journal of Mechanical Engineering, 2023, 59(17): 189-207. doi: 10.3901/JME.2023.17.189 [2] WU T, ZHANG W Y. Review on key development of magnetic bearings[J]. Machines, 2025, 13(2): 113. doi: 10.3390/machines13020113 [3] DABBAGH S R, ALSEED M M, SAADAT M, et al. Biomedical applications of magnetic levitation[J]. Advanced NanoBiomed Research, 2022, 2(3): 2100103. doi: 10.1002/anbr.202100103 [4] CHAVANNE J, LE BEC G. Prospects for the use of permanent magnets in future accelerator facilities[C]// 5th International Particle Accelerator Conference. Dresden:[s.n.], 2014: 968-973. [5] ZHOU F Z, YANG J, HU H L, et al. Study of repulsive permanent magnetic levitation mechanism and its dynamic characteristics[J]. Scientific Reports, 2024, 14: 29859. doi: 10.1038/s41598-024-81439-2 [6] 邓自刚,刘宗鑫,李海涛,等. 磁悬浮列车发展现状与展望[J]. 西南交通大学学报,2022,57(3): 455-474,530. doi: 10.3969/j.issn.0258-2724.20220001DENG Zigang, LIU Zongxin, LI Haitao, et al. Development status and prospect of maglev train[J]. Journal of Southwest Jiaotong University, 2022, 57(3): 455-474,530. doi: 10.3969/j.issn.0258-2724.20220001 [7] 马卫华,罗世辉,张敏,等. 中低速磁浮车辆研究综述[J]. 交通运输工程学报,2021,21(1): 199-216.MA Weihua, LUO Shihui, ZHANG Min, et al. Research review on medium and low speed maglev vehicle[J]. Journal of Traffic and Transportation Engineering, 2021, 21(1): 199-216. [8] BARBOSA F C. High speed intercity and urban passenger transport maglev train technology review: a technical and operational assessment[C]//2019 Joint Rail Conference. Snowbird: American Society of Mechanical Engineers, 2019: V001T08A002. [9] GUTFLEISCH O, WILLARD M A, BRÜCK E, et al. Magnetic materials and devices for the 21st century: stronger, lighter, and more energy efficient[J]. Advanced Materials, 2011, 23(7): 821-842. doi: 10.1002/adma.201002180 [10] 陈春涛,吴新振,郑晓钦,等. 基于改进等效面电流法的永磁电机气隙磁场解析计算[J]. 中国电机工程学报,2021,41(增1): 315-323.CHEN Chuntao, WU Xinzhen, ZHENG Xiaoqin, et al. Analytical calculation of air-gap magnetic field of permanent-magnet motor based on improved equivalent surface current method[J]. Proceedings of the CSEE, 2021, 41(S1): 315-323. [11] 柴凯,朱石坚,杨庆超,等. 三磁体型隔振器的性能分析和实验研究[J]. 振动与冲击,2018,37(6): 36-41.CHAI Kai, ZHU Shijian, YANG Qingchao, et al. Analysis and test for the performances of a tri-magnet vibration isolator[J]. Journal of Vibration and Shock, 2018, 37(6): 36-41. [12] 叶建和,占鹏飞,曾金成,等. Halbach型磁浮列车永磁轨道的空间磁场计算模型[J]. 磁性材料及器件,2024,55(5): 6-11.YE Jianhe, ZHAN Pengfei, ZENG Jincheng, et al. Calculation model of space magnetic field of Halbach-type permanent magnetic guideway in maglev trains[J]. Journal of Magnetic Materials and Devices, 2024, 55(5): 6-11. [13] GHOSH M K, GAO Y, DOZONO H, et al. Proposal of Maxwell stress tensor for local force calculation in magnetic body[C]//2018 IEEE International Magnetics Conference (INTERMAG). Singapore: IEEE, 2018: 1-4. [14] TANG W B, XIAO L Y, XIA D, et al. 2-D and 3-D analytical calculation of the magnetic field and levitation force between two halbach permanent magnet arrays[J]. IEEE Transactions on Magnetics, 2021, 57(4):8300208. [15] MALLINSON J. One-sided fluxes: a magnetic curiosity?[J]. IEEE Transactions on Magnetics, 1973, 9(4):678-682. [16] HALBACH K. Design of permanent multipole magnets with oriented rare earth cobalt material[J]. Nuclear Instruments and Methods, 1980, 169(1): 1-10. doi: 10.1016/0029-554X(80)90094-4 [17] BACHOVCHIN K D, HOBURG J F, POST R F. Magnetic fields and forces in permanent magnet levitated bearings[J]. IEEE Transactions on Magnetics, 2012, 48(7): 2112-2120. doi: 10.1109/TMAG.2012.2188140 [18] 赵春发,刘浩东,冯洋,等. 五位姿参数下车载永磁体与永磁轨道之间的磁力特性研究[J]. 西南交通大学学报,2024,59(4): 804-811. doi: 10.3969/j.issn.0258-2724.20240049ZHAO Chunfa, LIU Haodong, FENG Yang, et al. Magnetic force characteristics between on-board permanent magnet and permanent magnetic rail considering five pose parameters[J]. Journal of Southwest Jiaotong University, 2024, 59(4): 804-811. doi: 10.3969/j.issn.0258-2724.20240049 [19] JIANG Y, DENG Y F, ZHU P H, et al. Optimization on size of halbach array permanent magnets for magnetic levitation system for permanent magnet maglev train[J]. IEEE Access, 2021, 9: 44989-45000. doi: 10.1109/ACCESS.2021.3058124 [20] 李博涵,吴兴文,池茂儒,等. 基于Halbach阵列的永磁悬浮车辆悬浮系统磁力特性研究[J]. 机械,2024,51(10): 21-28,58. doi: 10.3969/j.issn.1006-0316.2024.10.003LI Bohan, WU Xingwen, CHI Maoru, et al. Magnetic force characteristics of permanent maglev vehicle levitation system based on Halbach array[J]. Machinery, 2024, 51(10): 21-28,58. doi: 10.3969/j.issn.1006-0316.2024.10.003 [21] ROVERS J M M, JANSEN J W, LOMONOVA E A, et al. Calculation of the static forces among the permanent magnets in a halbach array[J]. IEEE Transactions on Magnetics, 2009, 45(10): 4372-4375. doi: 10.1109/TMAG.2009.2021860 [22] SUN R X, ZHENG J, LI H T, et al. Halbach structure parameter optimization by Maxwell tensor method for PML in manned hybrid maglev[J]. Journal of Magnetism and Magnetic Materials, 2024, 610: 172566. doi: 10.1016/j.jmmm.2024.172566 [23] HEKMATI A, MAFI H. Impact of magnetization angles in permanent magnet guideways on high-temperature superconductors’ levitation[J]. IEEE Transactions on Magnetics, 2016, 52(9): 9000209. [24] ZHOU F Z, YANG J, JIA L M. Structure size optimization and magnetic circuit design of permanent magnet levitation system based on halbach array[J]. IEEE Access, 2023, 11: 113244-113254. doi: 10.1109/ACCESS.2023.3323596 [25] 高涛,杨杰,贾利民,等. 考虑机械阻尼结构的永磁悬浮系统动态特性研究[J]. 铁道学报,2021,43(11): 61-68. doi: 10.3969/j.issn.1001-8360.2021.11.008GAO Tao, YANG Jie, JIA Limin, et al. Study on dynamic characteristics of permanent magnet suspension system based on mechanical damping structure[J]. Journal of the China Railway Society, 2021, 43(11): 61-68. doi: 10.3969/j.issn.1001-8360.2021.11.008 [26] 唐文冰,肖立业,王粟,等. 磁悬浮轨道交通中的磁悬浮导向方式研究综述[J]. 电工电能新技术,2022,41(5): 45-60. doi: 10.12067/ATEEE2108022TANG Wenbing, XIAO Liye, WANG Su, et al. Summary of research on levitation-guidance modes in maglev rail transportation technology[J]. Advanced Technology of Electrical Engineering and Energy, 2022, 41(5): 45-60. doi: 10.12067/ATEEE2108022 [27] 陈花顺,彭月,杨杰. 稀土永磁悬浮阵列的电磁导向结构设计[J]. 稀土,2023,44(4): 214-224.CHEN Huashun, PENG Yue, YANG Jie. Design and feasibility analysis of electromagnetic guidance structure based on MAS array[J]. Chinese Rare Earths, 2023, 44(4): 214-224. [28] MUSOLINO A, RAUGI M, RIZZO R, et al. Stabilization of a permanent-magnet MAGLEV system via null-flux coils[J]. IEEE Transactions on Plasma Science, 2015, 43(5): 1242-1247. doi: 10.1109/TPS.2015.2404781 [29] SUN F, PEI W Z, ZHAO C, et al. Permanent maglev platform using a variable flux path mechanism: stable levitation and motion control[J]. IEEE Transactions on Magnetics, 2022, 58(7): 8300410. [30] LONG Z Q, HE G, XUE S. Study of EDS & EMS hybrid suspension system with permanent-magnet halbach array[J]. IEEE Transactions on Magnetics, 2011, 47(12): 4717-4724. doi: 10.1109/TMAG.2011.2159237 [31] WU C, LI G C, WANG D, et al. Dynamic characterization of permanent magnet electrodynamic suspension system with a novel passive damping magnet scheme[J]. Journal of Sound and Vibration, 2025, 599: 118849. doi: 10.1016/j.jsv.2024.118849 [32] 杨杰,高涛,邓永芳,等. 永磁磁浮空轨系统的研究与设计[J]. 铁道学报,2020,42(10): 30-37. doi: 10.3969/j.issn.1001-8360.2020.10.005YANG Jie, GAO Tao, DENG Yongfang, et al. Study and design on suspended permanent maglev rail transit system[J]. Journal of the China Railway Society, 2020, 42(10): 30-37. doi: 10.3969/j.issn.1001-8360.2020.10.005 [33] LI Y, XU Y G, YAN H Y, et al. Suspended monorail system: a new development of an urban rail transit system with low passenger capacity[C]//ICTE 2015. Dailan:American Society of Civil Engineers. 2015: 3180-3186. [34] 哈尔滨工业大学理论力学教研室. 理论力学Ⅰ[M]. 8版. 北京:高等教育出版社,2016. [35] 中华人民共和国国家市场监督管理总局,中国国家标准化管理委员会. 机车车辆动力学性能评定及试验鉴定规范:GB/T 5599—2019[S]. 北京:中国标准出版社,2019. -

 下载:
下载:


 点击查看大图
点击查看大图

计量
- 文章访问数: 328
- HTML全文浏览量: 277
- PDF下载量: 29
- 被引次数: 0