

Research on Fuzzy Proportional Integral Differential Control of Magnetic Drive Oil-free Scroll Compressor
-
摘要:
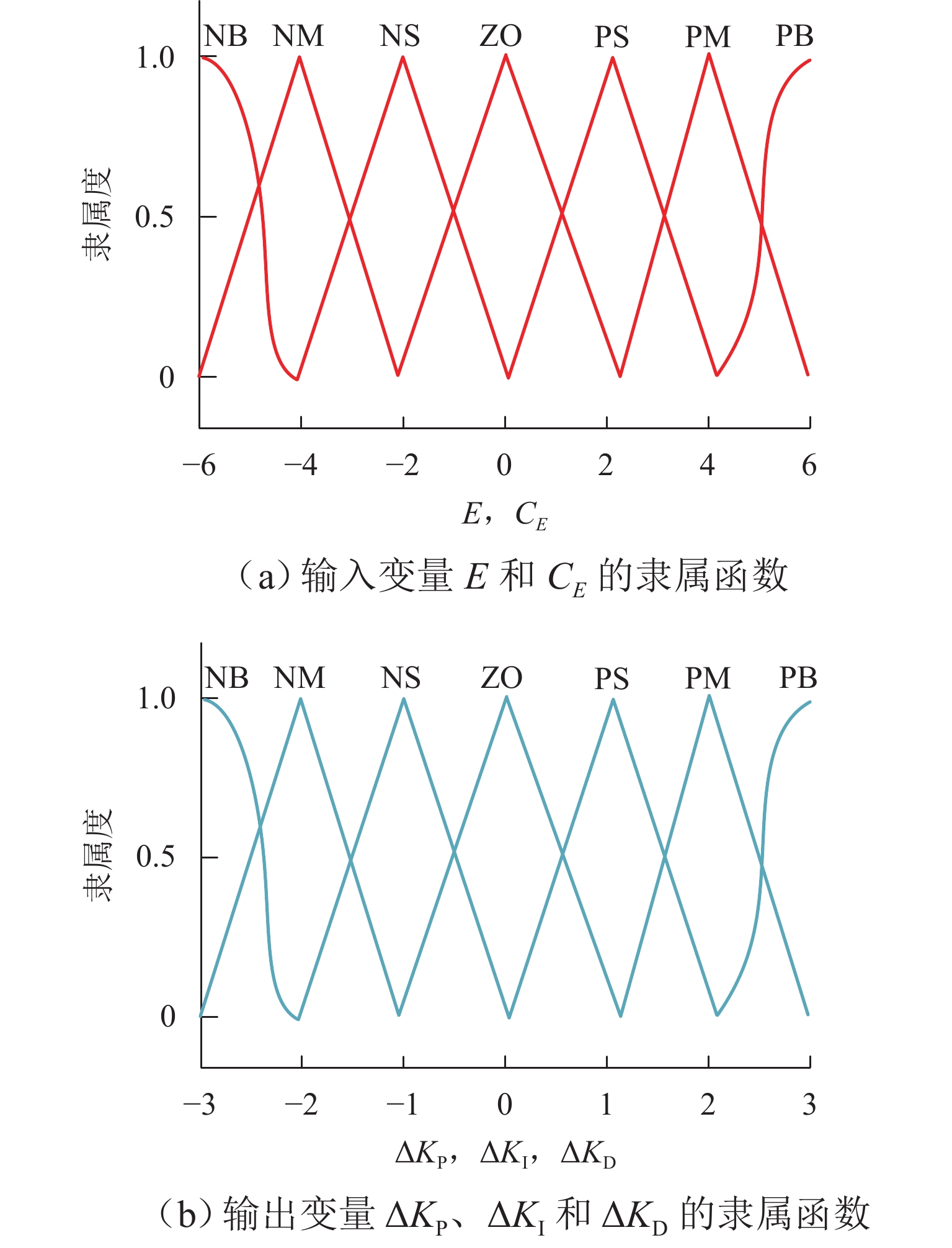
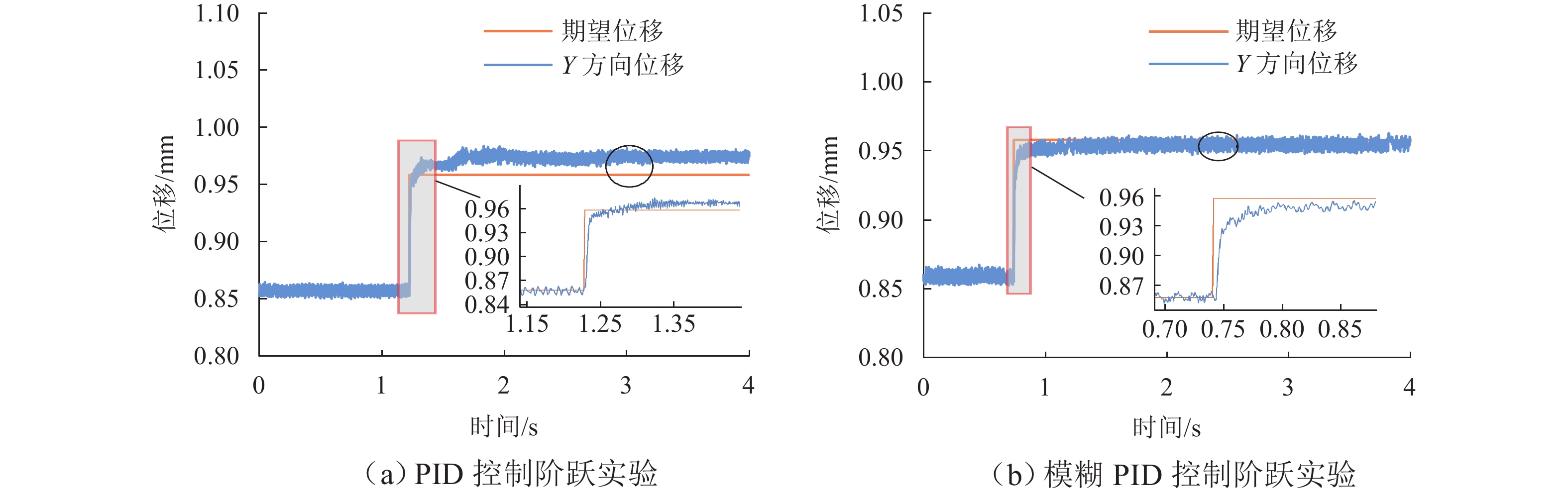
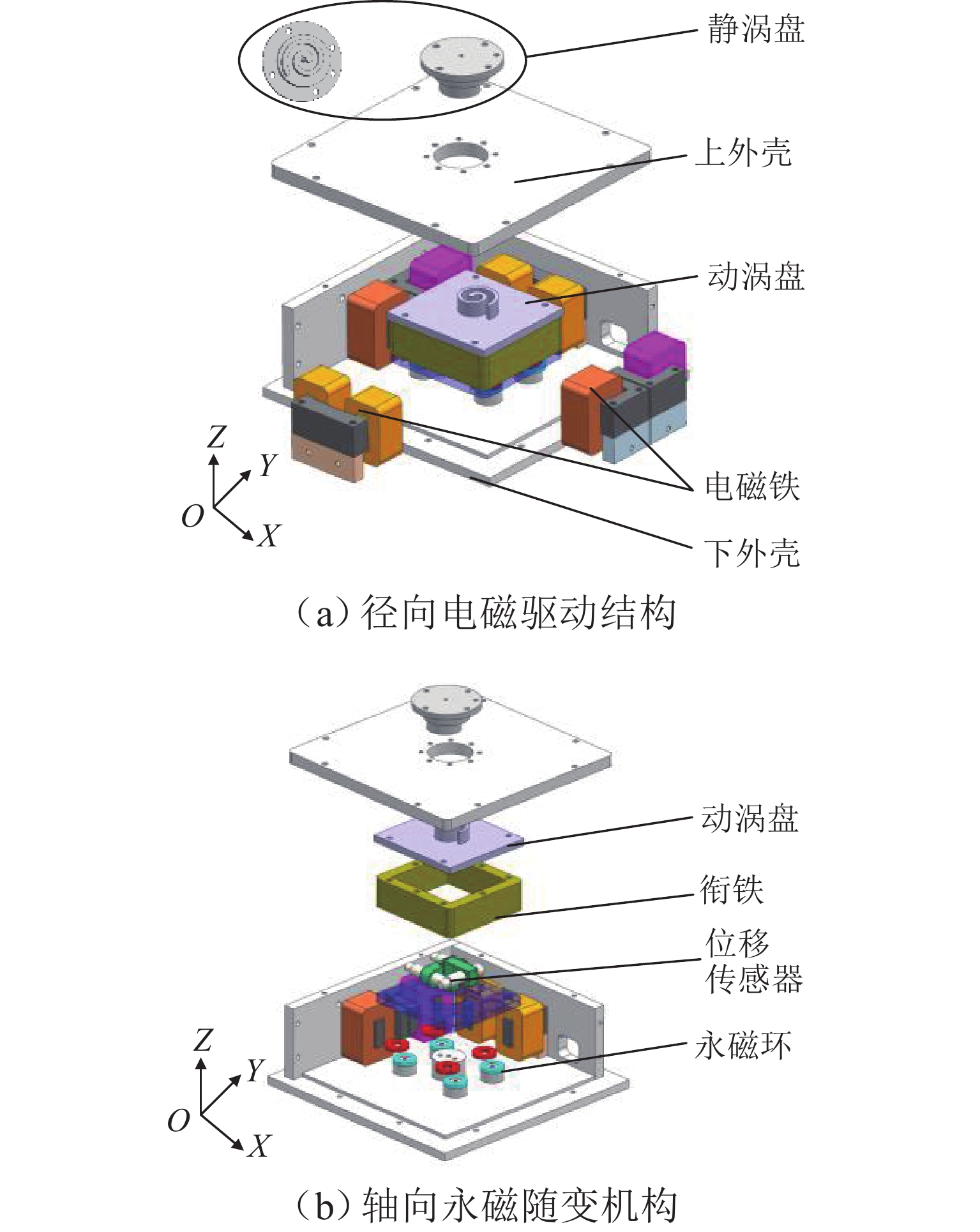
磁悬浮直驱式无油涡旋压缩机采用电磁力非接触式驱动动涡盘运动. 针对压缩机系统非线性较强、PID (proportional-integral-differential)控制下轨迹跟踪误差较大的问题设计了一种模糊PID控制器,可以在线实时修正控制参数,提高轨迹跟踪效果. 首先,介绍了磁悬浮直驱式无油涡旋压缩机的结构和工作原理,建立电磁驱动力的数学模型和系统动力学模型,并进行系统稳定性分析;其次,添加模糊逻辑,进行模糊控制器设计;最后,在控制参数相同的情况下,将PID与模糊PID 2种控制下的阶跃响应与轨迹跟踪结果进行对比分析. 结果表明:相较于PID控制,模糊PID控制下,阶跃响应时的稳定时间减少0.461 s,稳态误差减小0.012 mm;轨迹跟踪时,
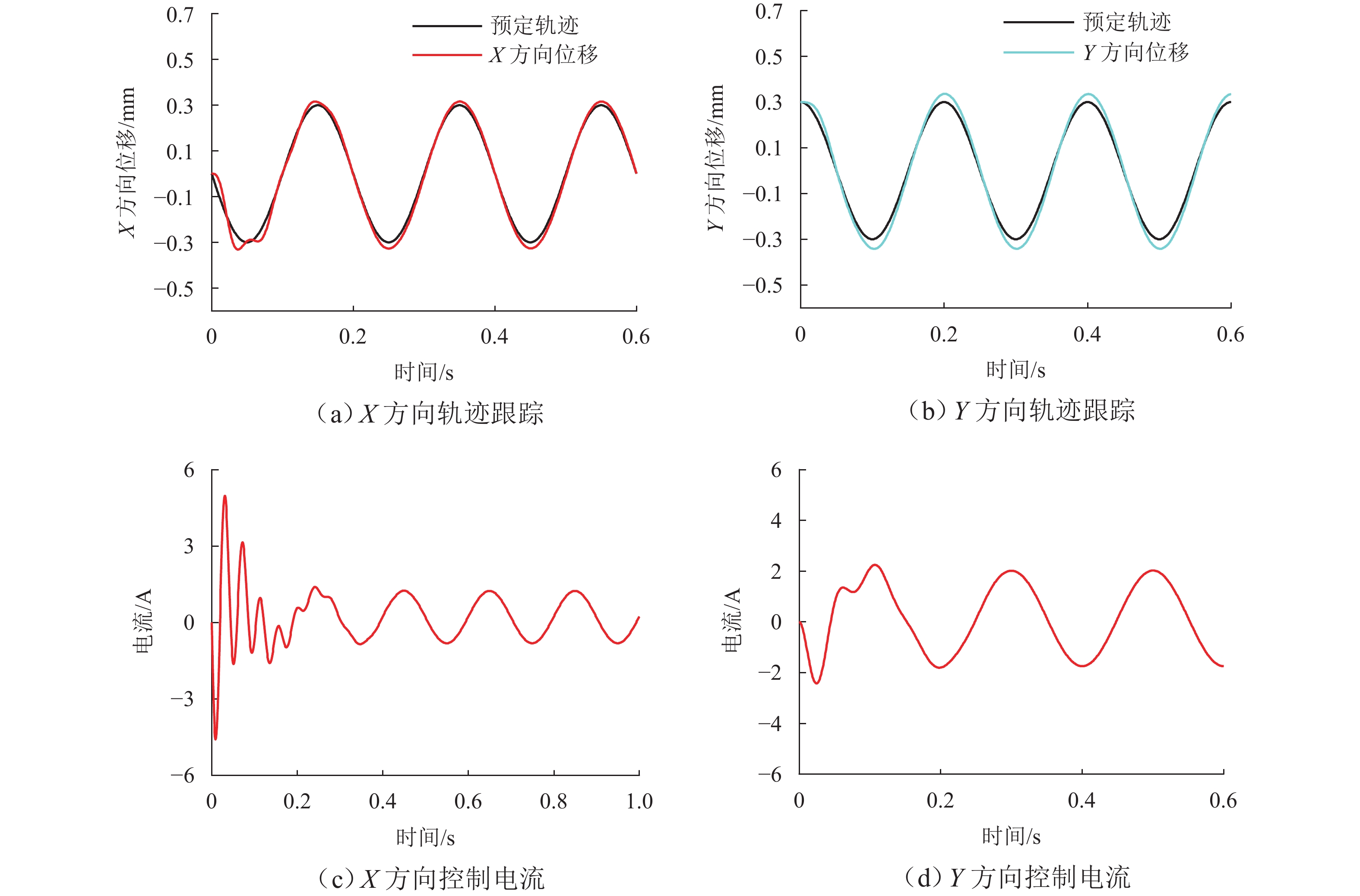
X 、Y 方向达到稳定跟踪的时间分别减少0.365、0.090 s;X 、Y 方向的最大轨迹跟踪误差分别减小0.043、0.060 mm,最大相对误差分别减小了50%、60%.Abstract:Magnetic drive oil-free scroll compressor (MDOFSC) adopts electromagnetic force to drive the orbiting scroll in a non-contact manner. The problems of strong nonlinearity in the compressor system and large trajectory tracking errors under proportional-integral-differential (PID) control were analyzed, and a fuzzy PID controller was designed to adjust control parameters online and improve trajectory tracking performance. Firstly, the structure and working principle of MDOFSC were introduced, and the mathematical model of electromagnetic drive and the system dynamics model were established; the system stability was analyzed. Secondly, fuzzy logic was added for fuzzy controller design; finally, the step response and trajectory tracking results under both PID and fuzzy PID control were compared under the same control parameters. The results show that under the fuzzy PID control, the stabilization time during the step response is reduced by 0.461 s, and the steady state error is reduced by 0.012 mm; the time to reach the stable tracking in the
X andY directions during the trajectory tracking is reduced by 0.365 s and 0.090 s, respectively, and the maximal trajectory tracking error in theX andY directions is reduced by 0.043 mm and 0.060 mm; the maximal relative error is reduced by 50% and 60%, respectively.-
Key words:
- magnetic drive /
- oil-free scroll compressor /
- fuzzy PID control /
- trajectory tracking
-
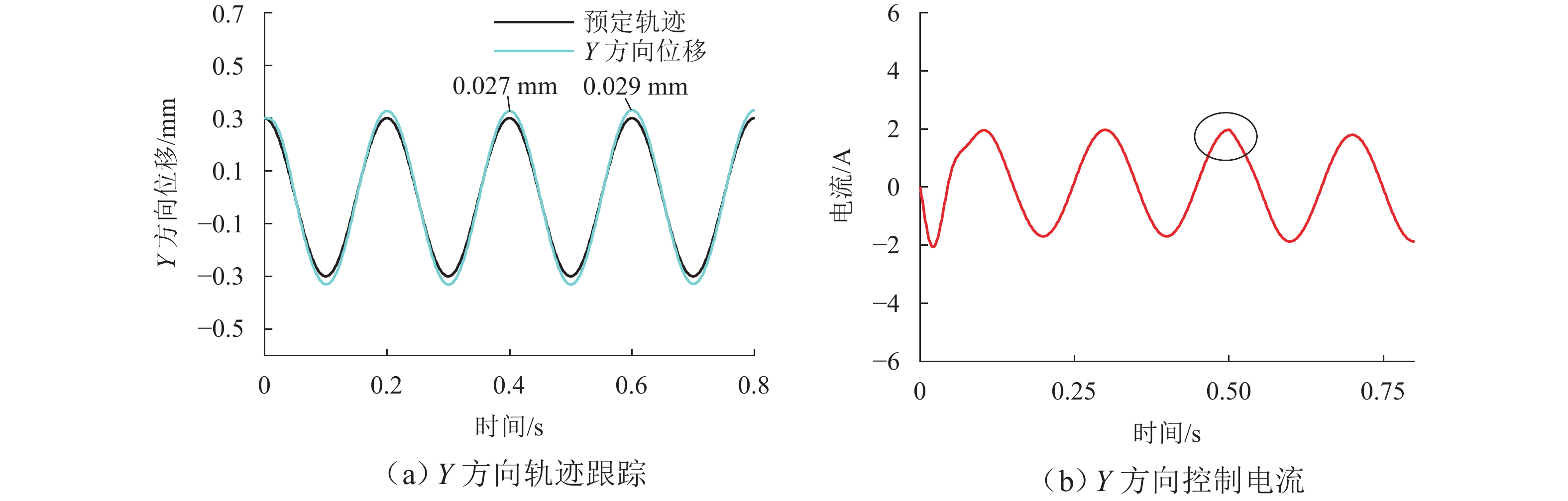
图 9 负载突变下模糊PID控制仿真
Figure 9. Simulation of fuzzy PID control under sudden load changes
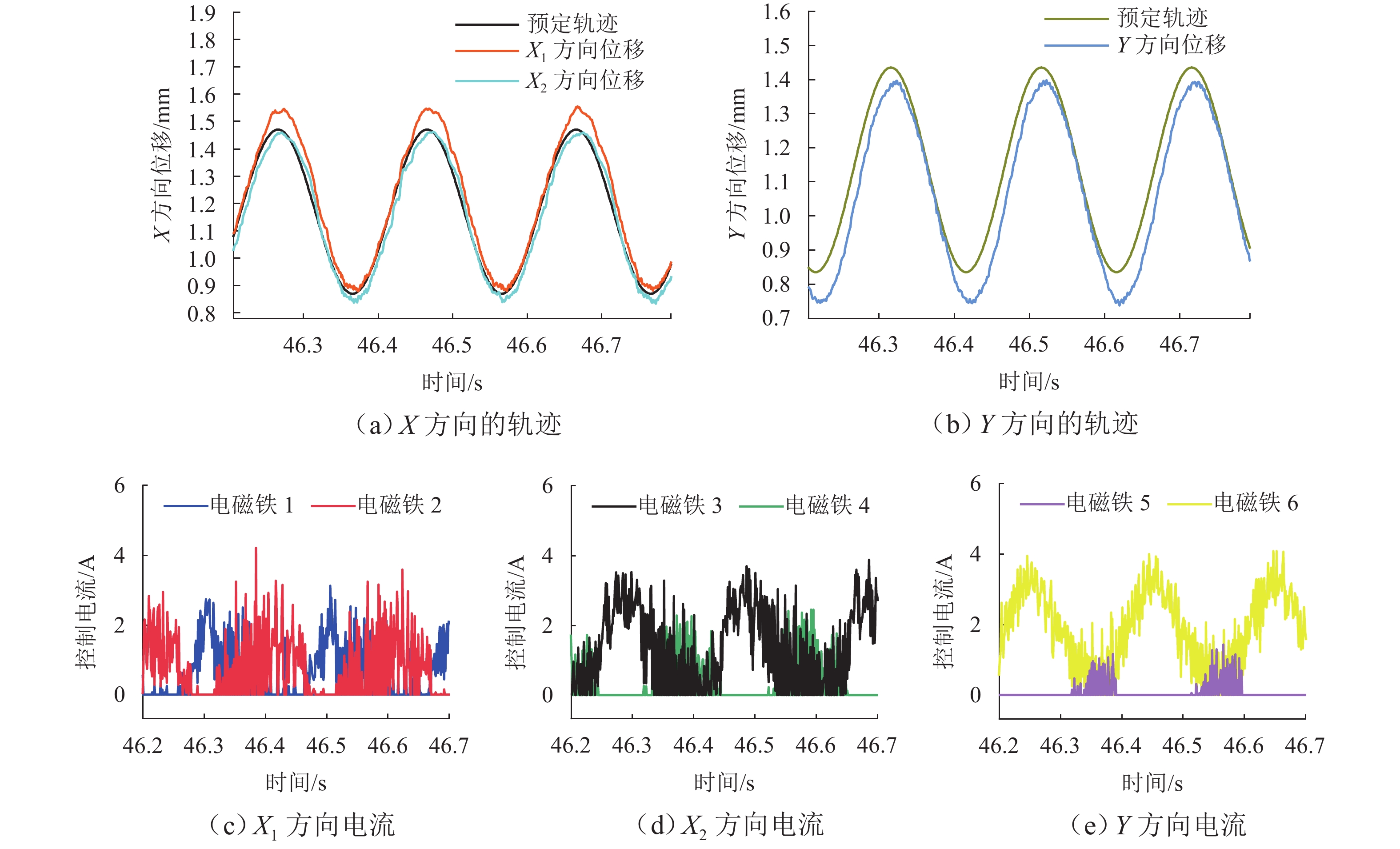
图 12 PID控制下轨迹跟踪实验结果
Figure 12. Experimental results of trajectory tracking under PID control

图 13 模糊PID控制下轨迹跟踪实验结果
Figure 13. Experimental results of trajectory tracking under fuzzy PID control
表 1 系统参数
Table 1. System parameters
结构参数 数值 J/(kg•m2) 1.51 × 10−3 m/kg 1.7 $k_{i_X} $/(N•A−1) 150 $k_{d_X} $/(N•m−1) −75 × 10−3 $k_{i_Y} $/(N•A−1) 180 $k_{d_Y} $/(N•m−1) −57 × 10−3 kn/(N•mm−1) 4.544 c/(N•s•m−1) 40 × 103 H/m 0.0195 L/m 0.021  下载: 导出CSV
下载: 导出CSV
表 2 ΔKP模糊规则表
Table 2. Fuzzy control rules of ΔKP
e ce NB NM NS ZO PS PM PB NB PB PB PM PM PS ZO ZO NM PB PB PM PS PS ZO NS NS PM PM PM PS ZO NS NS ZO PM PM PS ZO NS NM NM PS PS PS ZO NS NS NM NM PM PS ZO NS NM NM NM NB PB ZO ZO NM NM NM NB NB
下载: 导出CSV
表 3 ΔKI模糊规则表
Table 3. Fuzzy control rules of ΔKI
e ce NB NM NS ZO PS PM PB NB NB NB NM NM PS NS ZO NM NB NB NM NS NS ZO ZO NS NB NM NS NS ZO PS PS ZO NM NM NS ZO PS PM PM PS NM NS ZO PS PS PM PB PM ZO ZO PS PS PM PB NB PB ZO ZO PS PM PM PB PB
下载: 导出CSV
表 4 ΔKD模糊规则表
Table 4. Fuzzy control rules of ΔKD
e ce NB NM NS ZO PS PM PB NB PS NS NB NB NB NM PS NM PS NS NB NM NM NS ZO NS ZO NS NM NM ZO NS ZO ZO ZO NS NS NM NB NS ZO PS PS PS ZO NS NS NM NM PM PS ZO NS NM NM NM NB PB ZO ZO NM NM NM NB NB
下载: 导出CSV
-
[1] CARDONE M, GARGIULO B. Numerical simulation and experimental validation of an oil free scroll compressor[J]. Energies, 2020, 13(22): 5863.1-5863.11. doi: 10.3390/en13225863 [2] 刘振全. 涡旋式流体机械与涡旋压缩机[M]. 北京:机械工业出版社,2009. [3] 王立存,董光辉,王旭东,等. 通用型线电动涡旋压缩机的结构设计及动态仿真[J]. 中国机械工程,2017,28(6): 728-733. doi: 10.3969/j.issn.1004-132X.2017.06.015WANG Licun, DONG Guanghui, WANG Xudong, et al. Structural design and dynamic simulation of a general profile electric scroll compressor[J]. China Mechanical Engineering, 2017, 28(6): 728-733. doi: 10.3969/j.issn.1004-132X.2017.06.015 [4] 孟浩,李奥,李海生,等. 无油涡旋压缩机开槽涡旋齿的变形行为研究[J]. 流体机械,2022,50(3): 66-72,104. doi: 10.3969/j.issn.1005-0329.2022.03.011MENG Hao, LI Ao, LI Haisheng, et al. Research on deformation behavior of grooved scroll teeth for oil-free scroll compressor[J]. Fluid Machinery, 2022, 50(3): 66-72,104. doi: 10.3969/j.issn.1005-0329.2022.03.011 [5] SUN J, PENG B, ZHU B G. Numerical simulation and experimental research of oil-free scroll air compressor based on CFD[J]. Recent Patents on Mechanical Engineering, 2022, 15(3): 328-339. doi: 10.2174/2212797614666210830154422 [6] CHENG S, FENG Y Z, WANG K, et al. Tribo-dynamics modeling and analysis of key friction pairs in scroll compressor with floating fixed scroll design[J]. Engineering Applications of Computational Fluid Mechanics, 2022, 16(1): 2270-2285. doi: 10.1080/19942060.2022.2146754 [7] 彭斌,刘慧鑫,陶耀辉. 基于变径基圆渐开线涡旋压缩机的几何模型及优化研究[J]. 上海交通大学学报,2023,57(8): 1046-1054.PENG Bin, LIU Huixin, TAO Yaohui. Geometrical model and optimization of scroll compressor based on involute of circle with variable radii[J]. Journal of Shanghai Jiao Tong University, 2023, 57(8): 1046-1054. [8] ZHENG S Y, WEI M S, ZHOU Y, et al. Tangential leakage flow control with seal-grooves on the static scroll of a CO2 scroll compressor[J]. Applied Thermal Engineering, 2022, 208: 118213.1-118213.12. doi: 10.1016/j.applthermaleng.2022.118213 [9] 郝胜利,马国远,许树学,等. 电动车空调用变壁厚涡旋压缩机的性能研究[J]. 流体机械,2020,48(4): 24-28,41. doi: 10.3969/j.issn.1005-0329.2020.04.005HAO Shengli, MA Guoyuan, XU Shuxue, et al. Research on performance of variable wall thickness scroll compressors for electric vehicle air conditioning[J]. Fluid Machinery, 2020, 48(4): 24-28,41. doi: 10.3969/j.issn.1005-0329.2020.04.005 [10] WANG J, HAN Y, PAN S Y, et al. Design and development of an oil-free double-scroll air compressor used in a PEM fuel cell system[J]. Renewable Energy, 2022, 199: 840-851. doi: 10.1016/j.renene.2022.08.154 [11] HE Z L, JI L T, XING Z W. Experimental investigation on the DLC film coating technology in scroll compressors of automobile air conditioning[J]. Energies, 2020, 13(19): 5103.1-5103.16. [12] GUTH T, ATAKAN B. Semi-empirical model of a variable speed scroll compressor for R-290 with the focus on compressor efficiencies and transferability[J]. International Journal of Refrigeration, 2023, 146: 483-499. doi: 10.1016/j.ijrefrig.2022.10.024 [13] TRUONG T N, VO A T, KANG H J. Real-time implementation of the prescribed performance tracking control for magnetic levitation systems[J]. Sensors, 2022, 22(23): 9132.1-9132.16. [14] ZHAO C, OKA K, SUN F, et al. Design of zero-power control strategy with resisting tilt of hybrid magnetic levitation system[J]. IEEE Transactions on Industrial Electronics, 2022, 69(11): 11394-11402. doi: 10.1109/TIE.2021.3121670 [15] 罗成,张昆仑,靖永志. 新型Halbach阵列永磁电动悬浮系统垂向稳定性[J]. 交通运输工程学报,2019,19(2): 101-109. doi: 10.3969/j.issn.1671-1637.2019.02.010LUO Cheng, ZHANG Kunlun, JING Yongzhi. Vertical stability of permanent magnet EDS system with novel Halbach array[J]. Journal of Traffic and Transportation Engineering, 2019, 19(2): 101-109. doi: 10.3969/j.issn.1671-1637.2019.02.010 [16] 刘淑琴,边忠国,李瑞建,等. 磁悬浮人工心脏泵及其在体外循环系统上的试验研究[J]. 西南交通大学学报,2023,58(4): 820-826,862. doi: 10.3969/j.issn.0258-2724.20211012LIU Shuqin, BIAN Zhongguo, LI Ruijian, et al. Maglev artificial heart pump and experimental study on ECMO[J]. Journal of Southwest Jiaotong University, 2023, 58(4): 820-826,862. doi: 10.3969/j.issn.0258-2724.20211012 [17] 赵春发,刘浩东,冯洋,等. 五位姿参数下车载永磁体与永磁轨道之间的磁力特性研究[J]. 西南交通大学学报,2024,59(4): 804-811. doi: 10.3969/j.issn.0258-2724.20240049ZHAO Chunfa, LIU Haodong, FENG Yang, et al. Magnetic force characteristics between on-board permanent magnet and permanent magnetic rail considering five pose parameters[J]. Journal of Southwest Jiaotong University, 2024, 59(4): 804-811. doi: 10.3969/j.issn.0258-2724.20240049 [18] CHEN J J, LU X. Least-current maneuver sequence for electromagnetic suspension control subjected to large perturbation found by direct collocation[J]. Journal of the Chinese Institute of Engineers, 2022, 45(5): 391-401. doi: 10.1080/02533839.2022.2061598 [19] SUN Y P, LAN Y P. Research on self-learning fuzzy control of controllable excitation magnetic suspension linear synchronous motor[J]. Journal of Electrical Engineering & Technology, 2020, 15(2): 843-854. [19] SUN Y P, LAN Y P. Research on self-learning fuzzy control of controllable excitation magnetic suspension linear synchronous motor[J]. Journal of Electrical Engineering & Technology, 2020, 15(2): 843-854. [20] 许贤泽,宋明星,龚勇兴,等. 基于扰动补偿的磁悬浮转台分数阶滑模控制[J]. 西南交通大学学报,2024,59(4): 766-775. doi: 10.3969/j.issn.0258-2724.20230412XU Xianze, SONG Mingxing, GONG Yongxing, et al. Fractional-order sliding mode control for maglev rotary table based on disturbance compensation[J]. Journal of Southwest Jiaotong University, 2024, 59(4): 766-775. doi: 10.3969/j.issn.0258-2724.20230412 [21] YAO X, CHEN Z B. Sliding mode control with deep learning method for rotor trajectory control of active magnetic bearing system[J]. Transactions of the Institute of Measurement and Control, 2019, 41(5): 1383-1394. doi: 10.1177/0142331218778324 [22] 靖永志,冯伟,王森,等. 基于自适应非奇异终端滑模的悬浮控制策略[J]. 西南交通大学学报,2022,57(3): 566-573. doi: 10.3969/j.issn.0258-2724.20210743JING Yongzhi, FENG Wei, WANG Sen, et al. Levitation control strategy based on adaptive non-singular terminal sliding mode[J]. Journal of Southwest Jiaotong University, 2022, 57(3): 566-573. doi: 10.3969/j.issn.0258-2724.20210743 [23] 翟明达,张博,李晓龙,等. 基于模糊PID控制的准零刚度磁悬浮隔振平台的设计与实现[J]. 西南交通大学学报,2023,58(4): 886-895. doi: 10.3969/j.issn.0258-2724.20220880ZHAI Mingda, ZHANG Bo, LI Xiaolong, et al. Design and implementation of magnetic suspension vibration isolation platform with quasi-zero stiffness based on fuzzy PID control[J]. Journal of Southwest Jiaotong University, 2023, 58(4): 886-895. doi: 10.3969/j.issn.0258-2724.20220880 [24] SHI C, SUN F, XU F, et al. Analysis of trajectory tracking characteristics of a magnetically driven oil-free scroll compressor[J]. Actuators, 2022, 11(11): 312.1-312.13. doi: 10.3390/act11110312 [25] 史策,徐方超,孙凤,等. 磁力涡旋压缩机永磁随变机构的力学特性[J]. 西南交通大学学报,2022,57(3): 597-603. doi: 10.3969/j.issn.0258-2724.20210986SHI Ce, XU Fangchao, SUN Feng, et al. Mechanical properties of scroll compressor with permanent magnetic compliance mechanism[J]. Journal of Southwest Jiaotong University, 2022, 57(3): 597-603. doi: 10.3969/j.issn.0258-2724.20210986 -

 下载:
下载:






 点击查看大图
点击查看大图
计量
- 文章访问数: 426
- HTML全文浏览量: 233
- PDF下载量: 27
- 被引次数: 0