摘要:
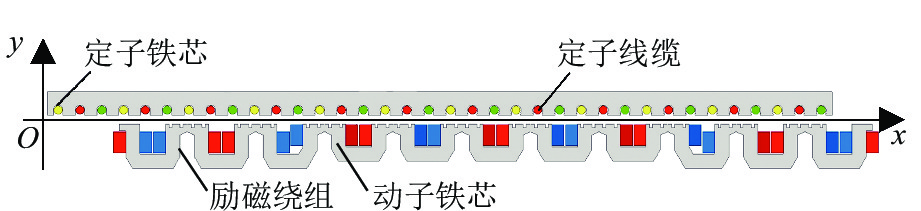
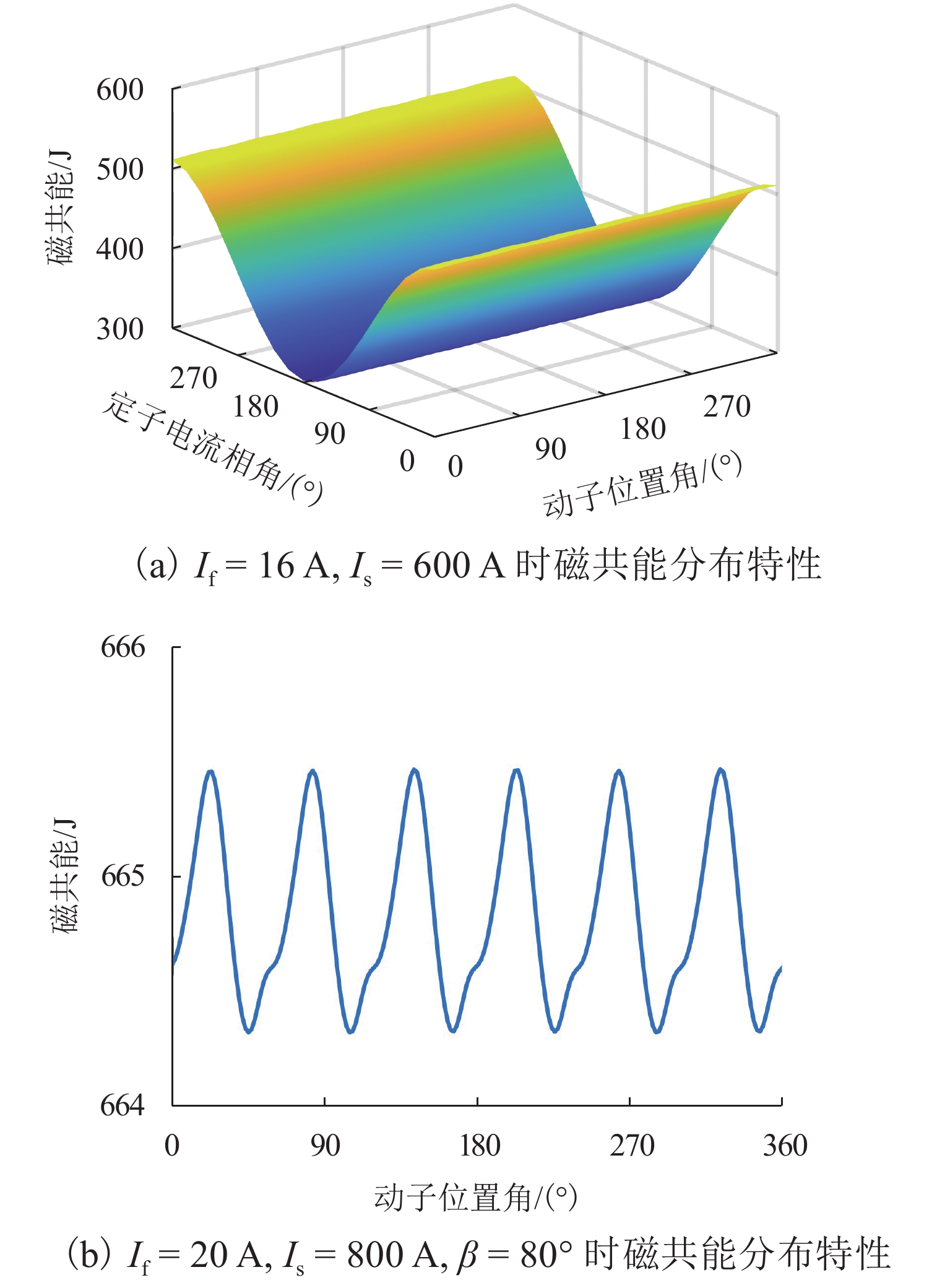
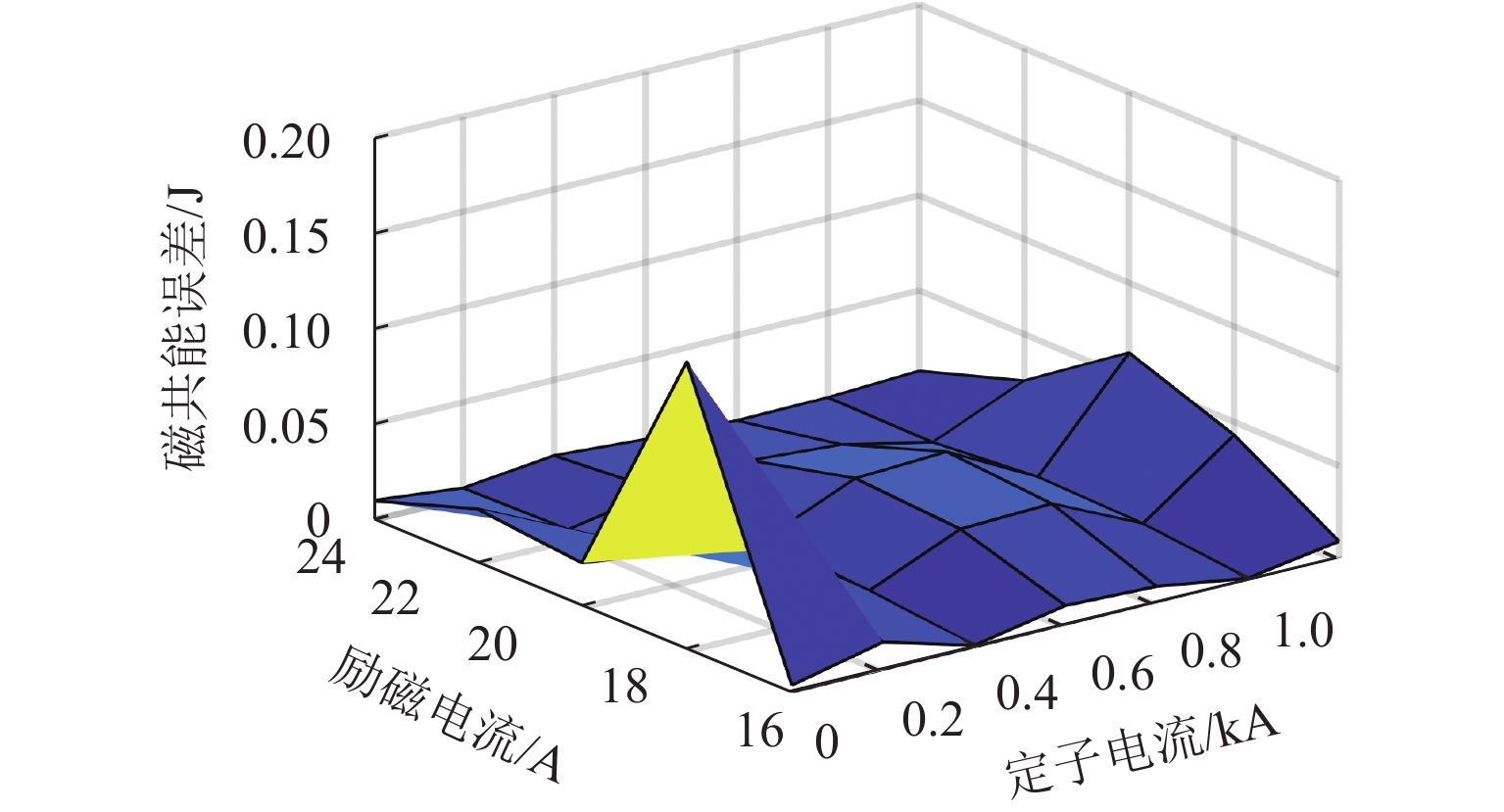
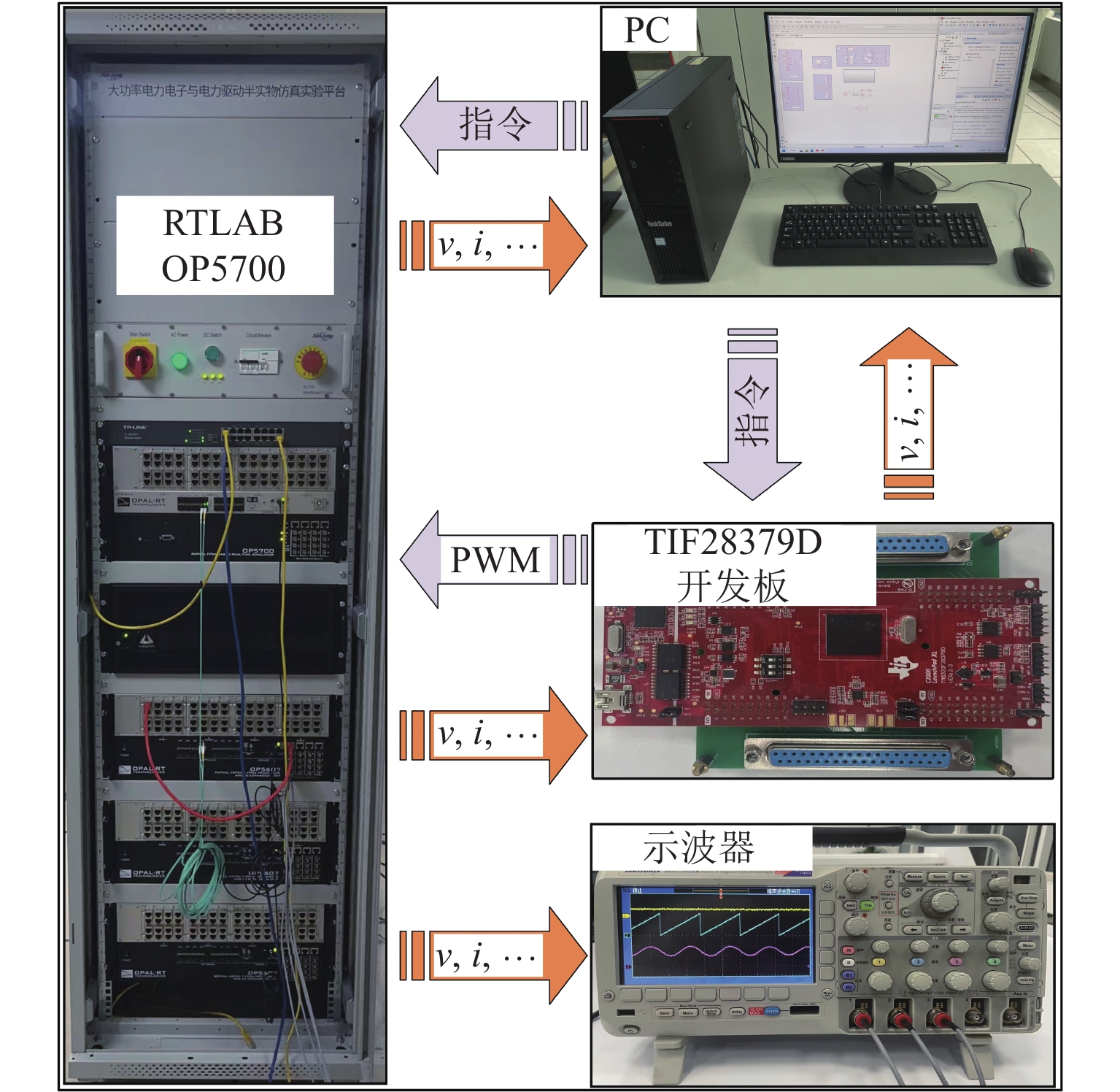
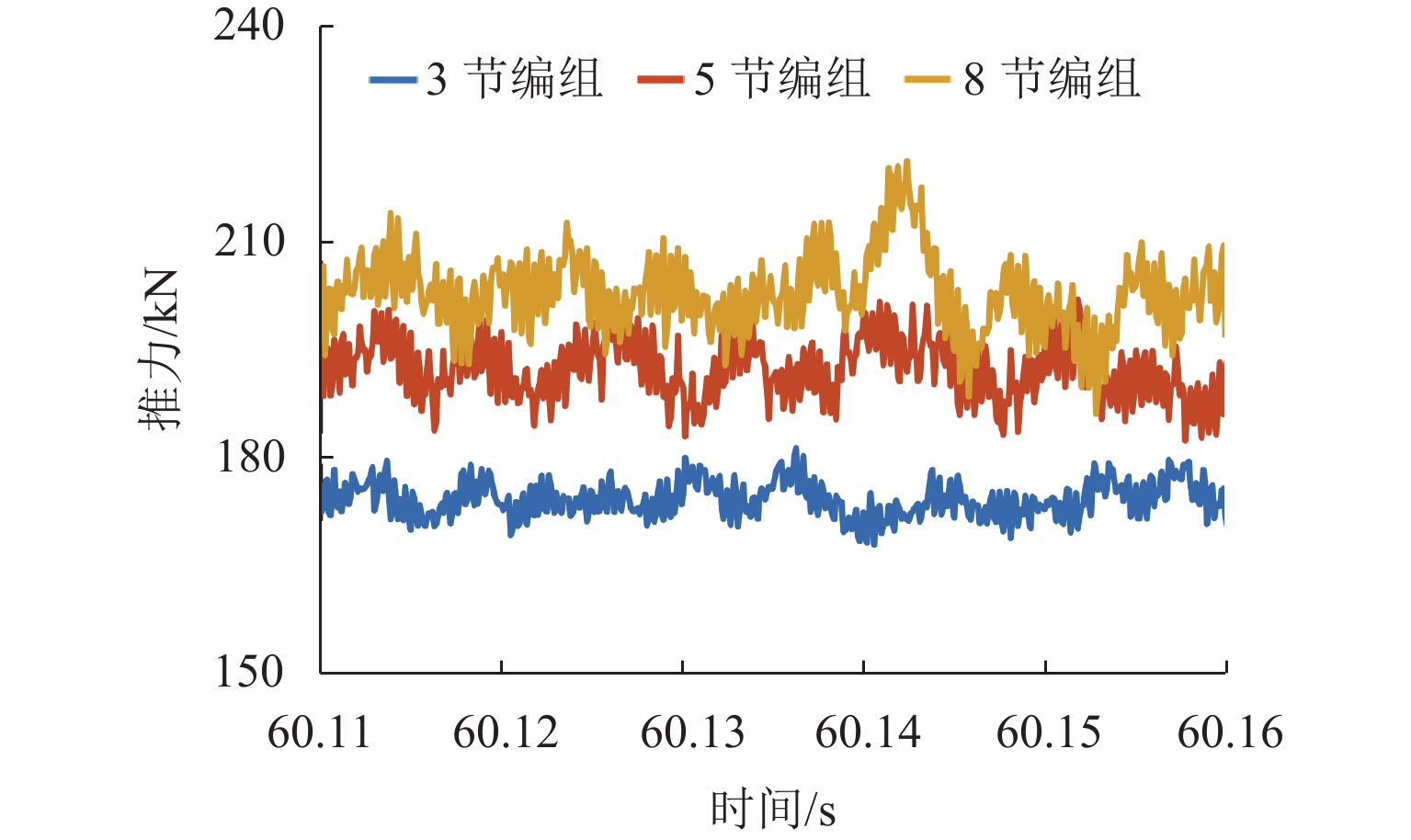
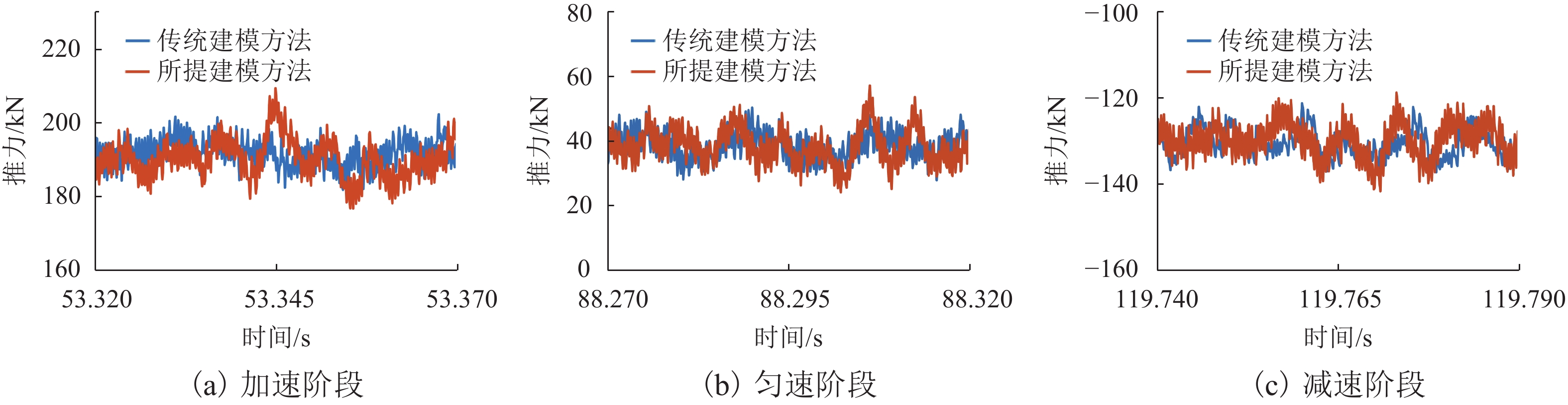
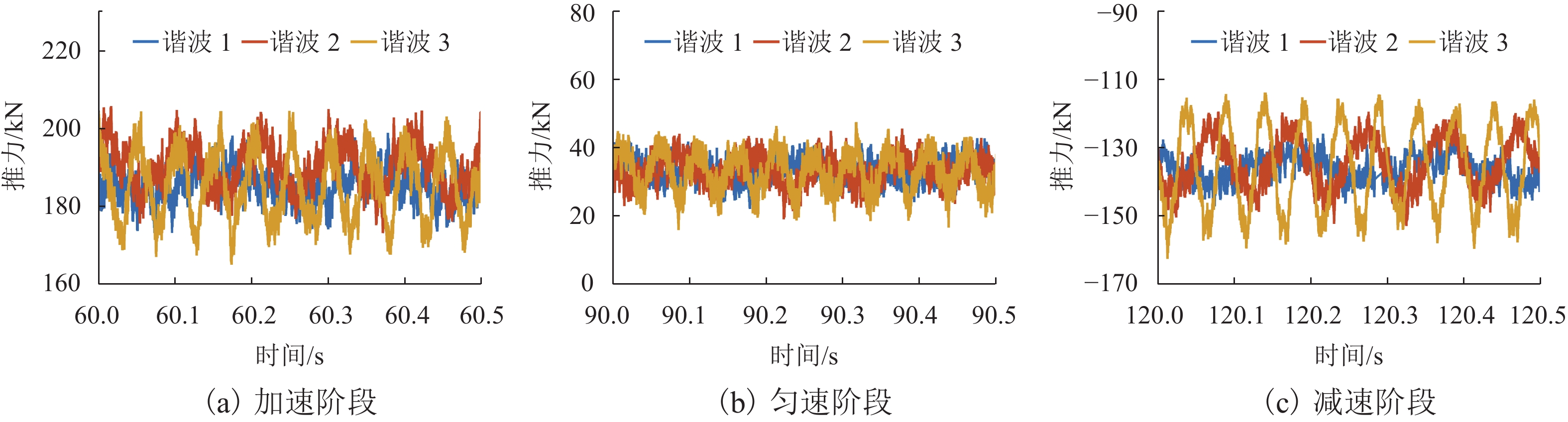
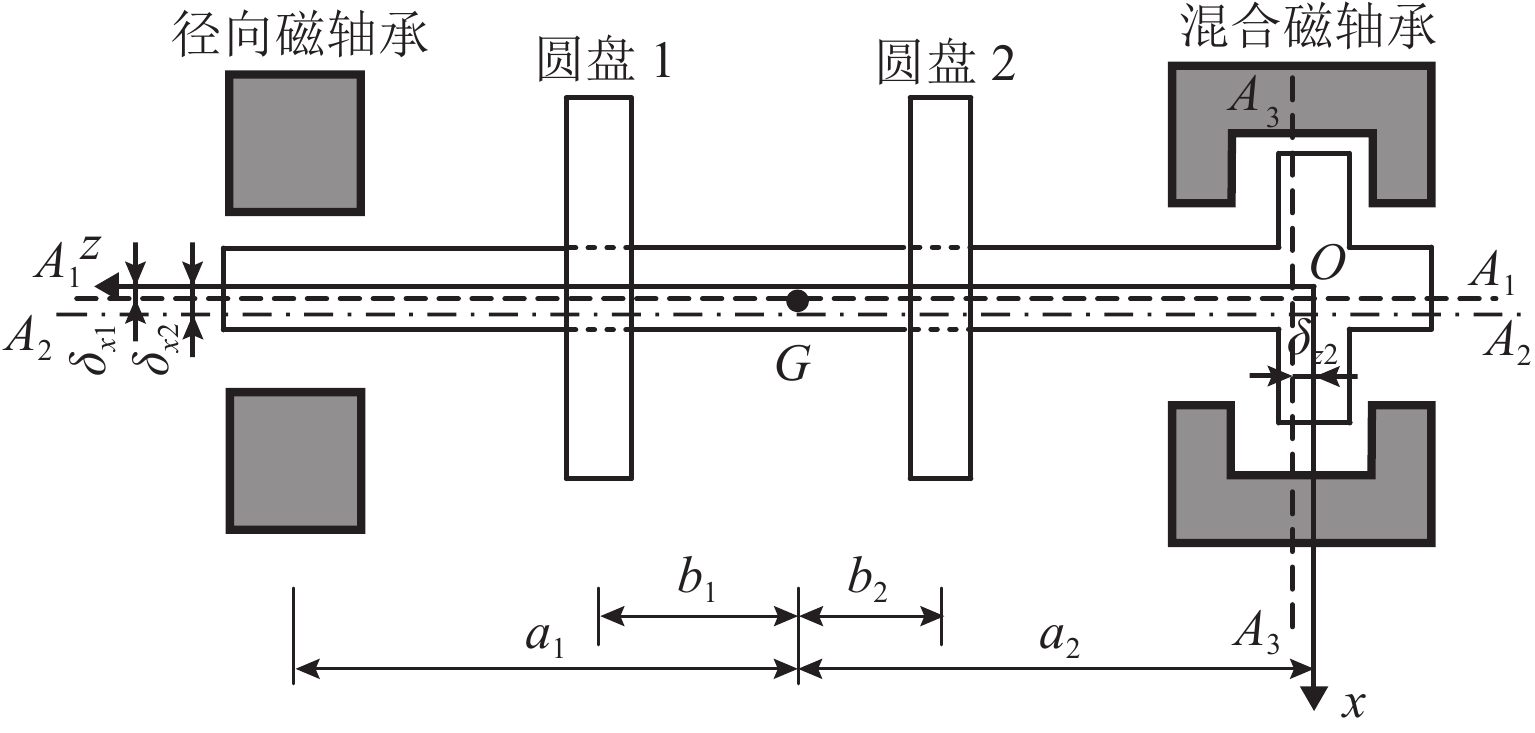
为提高高速磁浮直线同步电机模型精度,基于电磁铁模块磁共能重构,提出一种计及悬浮系统影响的分布参数建模方法. 首先,建立高速磁浮列车电磁铁模块的有限元模型,利用有限元数值分析获取电磁铁模块在不同工况下的磁共能数据,通过对磁共能进行傅里叶级数展开及多项式拟合构建磁共能的解析模型;其次,根据磁共能解析模型推导电磁铁模块的磁链、电压和推力方程;然后,根据列车编组数量和电磁铁模块数量分别建立左右两侧直线同步电机的数学模型,并通过运动学方程计算高速磁浮列车位置和速度;最后,通过硬件在环仿真系统进行实验验证. 试验结果表明:本文所提建模方法与传统建模方法相比,推力波动幅值增加超过6.8%;并且所提方法可以准确表征悬浮系统对牵引控制的影响,当励磁电流谐波幅值增加0.5、1.0、2.0 A时,推力波动幅值分别最大增加54.3%、26.2%、83.7%;当励磁电流谐波频率为5、10、20 Hz时,推力的谐波频率最大达到5.14%,21.75%和14.17%.


 高级检索
高级检索
 Email alert
Email alert RSS
RSS 摘要
摘要 HTML全文
HTML全文 PDF 2997KB
PDF 2997KB 附件
附件 施引文献
施引文献