

A Survey on Air-Ground Networks of Unmanned Aerial Vehicles
-
摘要:
无人机具有快速部署、成本低廉等优势. 无人机空地网络通过将基站设备部署至升空无人机平台,能从空中快速构建对地覆盖网络,因而在应急救灾、偏远覆盖、智能交通、智慧城市等方面具有广阔的应用前景,近年来受到广泛关注. 面向无人机空地网络应用场景,结合无人机的机动、组网、载荷等特点,围绕无人机空地网络覆盖性能提升、无人机空地网络通感算一体化设计、智能反射面技术辅助的无人机空地网络、鲁棒无人机空地网络四个维度,从网络场景、关键技术挑战、性能优化控制方法等几方面梳理无人机空地网络的研究现状,并探索优化提升无人机空地网络性能的未来研究方向.
Abstract:Unmanned aerial vehicles (UAVs) can be rapidly and cost-effectively deployed. By deploying the base station equipment to the launching UAV platform, the air-ground networks of UAVs can quickly build ground coverage network from the air, so it has broad application prospects in emergency relief, remote area coverage, intelligent transportation, smart city, and other aspects and has received wide attention in recent years. Based on the application scenario of air-ground networks of UAVs, the characteristics of UAVs’maneuver, network, and load were considered. From the four dimensions of coverage performance improvement of air-ground networks, integrated communication-sensing-calculation design of air-ground networks, reconfigurable intelligent surfaces (RIS)-assisted air-ground networks, and robust air-ground networks of UAVs, the research status of air-ground networks of UAVs was reviewed in terms of network scenarios, key technical challenges, and performance optimization control methods. In addition, the future research direction of optimizing the performance of air-ground networks of UAVs was explored.
-
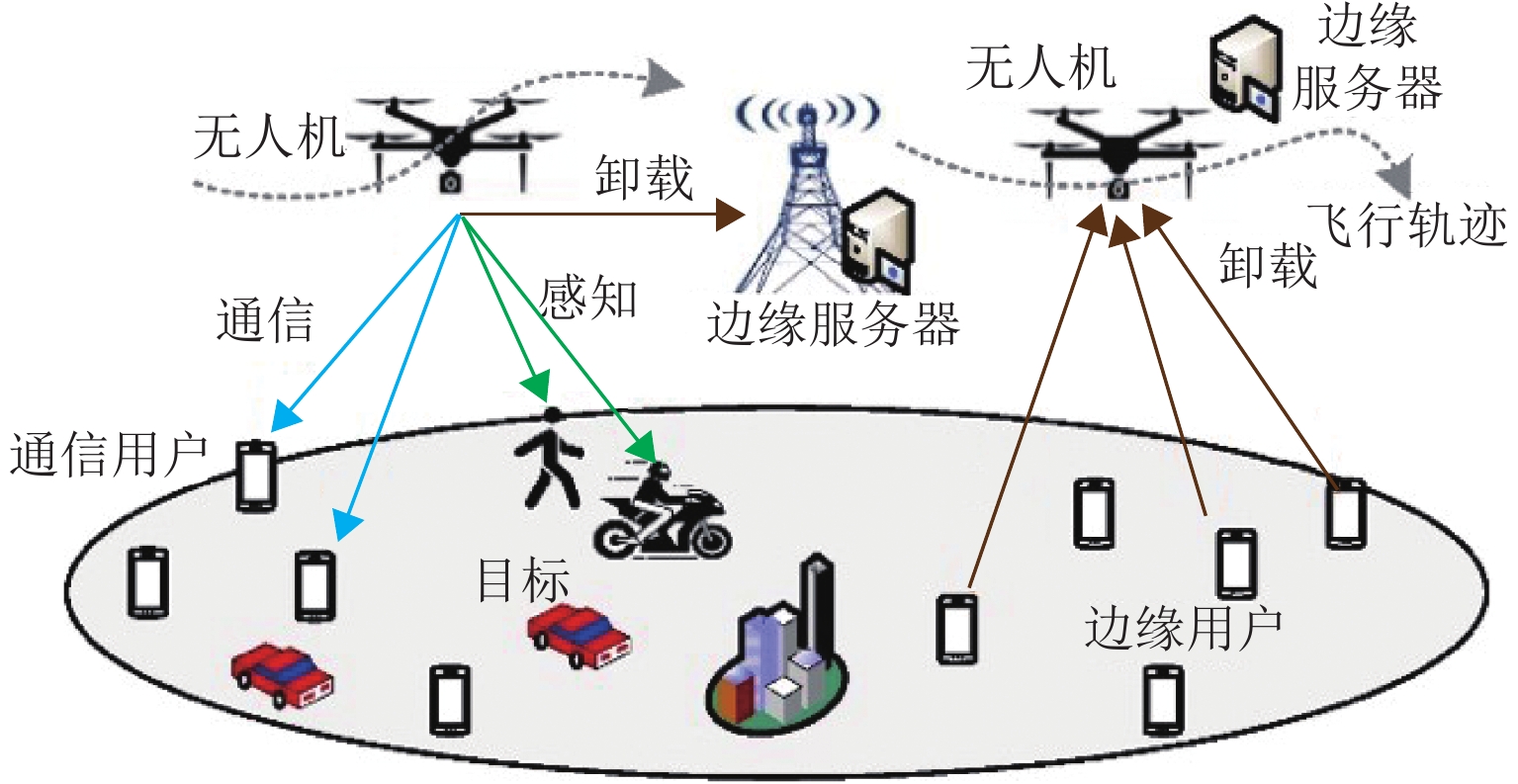
图 2 基于无人机的通感算一体化网络结构
Figure 2. Integrated communication-sensing-computing network architecture of UAVs
表 1 无人机空地网络国内外研究现状汇总
Table 1. Research summary of air-ground UAV networks
场景
描述优化算法 控制手段 性能指标 来源 待进一步解决问题 无人机空地网络覆盖 启发式算法 无人机部署位置、
无人机轨迹用户覆盖百分比 文献[1,13] 现有研究通常针对用户静止场景下,采用传统优化算法实现轨迹与资源控制,以提高网络性能. 当地面用户数量增加且用户出现高移动特性时,如何进一步优化空地双移动约束下的对地网络覆盖性能还需进一步分析 覆盖率 文献[22,24] 凸优化 无人机部署位置、
无人机轨迹、功率覆盖用户数量 文献[14-15] 中断概率 文献[27-30] 聚类算法 无人机基站的三维位置、用户对路径损失的补偿因子 覆盖用户数量 文献[16-17,31] 回声状态网络、深度强化学习 无人机初始部署位置、轨迹、功率控制、带宽 吞吐量(移动用户覆盖问题) 文献[20] 覆盖时间与覆盖率 文献[21] 覆盖效率(覆盖率与覆盖时间比值) 文献[23-26] 基于网络的异构粒子群优化算法 无人机轨迹、带宽 覆盖面积 文献[33] 无人机空地网络通感算一体化 凸优化、聚类 射波束成型、无人机位置、轨迹、飞行速度、用户关联、发射波束成型、感知频率/时间、无人机飞行轨迹 平均用户速率 文献[4,13-15] 现有研究主要围绕通感一体化或通算一体化场景,未充分研究通感算一体化网络设计与优化控制. 此外,在网络控制时所采取的传统优化算法复杂度较高导致其很难适应高度变化的信道场景. 后续研究可针对无人机通感算场景,基于机器学习技术设计低复杂度的无人机通感算一体化网络管控方案 用户关联、功率分配、无人机位置 效用函数 文献[18] 任务卸载比、网络资源、无人机轨迹 能耗 文献[48-49] 深度强化学习 无人机飞行方向、飞行距离、功率分配、信道分配 感知有效性和公
平性文献[19] 任务卸载比、网络资源、无人机轨迹 时延 文献[51] 用户关联、无人机轨迹规划、功率分配 加权频谱效率 文献[52] 无人机轨迹、时隙总数、感知调度 感知目标的平均信息年龄 文献[8] RIS 辅助的无人机空地网络 深度强化学习
算法无人机飞行轨迹、频谱资源、计算资源、智能反射面系数、设备发射功率等 数据新鲜度 文献[61] 当前面向 RIS 辅助的无人机空地网络控制研究通常具有极高的控制复杂度和极大的信息反馈量,如何进一步降低网络控制复杂度并降低网络控制时的信息反馈量,使得其能够更好地适配无线环境变化 能耗 文献[62] 凸优化算法、块坐标下降法 无人机飞行轨迹、频谱资源、计算资源、智能反射面系数、设备发射功率等 能耗 文献[63] 能效 文献[12,65] 鲁棒无人机空地网络 联邦学习 设备选择、无人机部署、子信道分配、传输功率控制 最小化联邦学习模型的收敛时间和学习精度损失 文献[69-71] 当前研究考虑的外部电磁环境相对简单,当面对外部复杂电磁环境与有意干扰情况,如何提升无人机空地网络鲁棒性还需要进一步研究 深度优先搜索算法、连续凸近似、拉格朗日对偶、块坐标下降算法、遗传算法和粒子群算法 用户调度,带宽分配、功率控制、轨迹控制、半径和圆心 能耗效率、最大化每个用户的平均最小传输速率、最大化系统容量、最大化服务用户数 文献[19,72,75-77] 多智能体深度强化学习 飞行轨迹、子载波分配、通信/干扰功率 能耗效率、最大化每个用户的平均最小安全传输速率、最大化每个用户的安全容量 文献[78-81]  下载: 导出CSV
下载: 导出CSV
-
[1] REINA D G, CAMP T, MUNJAL A, et al. Evolutionary deployment and local search-based movements of 0th responders in disaster scenarios[J]. Future Generation Computer Systems, 2018, 88: 61-78. doi: 10.1016/j.future.2018.05.024 [2] ZHAO H T, WANG H J, WU W Y, et al. Deployment algorithms for UAV airborne networks toward on-demand coverage[J]. IEEE Journal on Selected Areas in Communications, 2018, 36(9): 2015-2031. doi: 10.1109/JSAC.2018.2864376 [3] SHAYBOUB M, REDA E, AL-MAHDI H, et al. An efficient framework for sensor data collection by UAV based on clustering, two-fold ant colony optimization and node grouping[EB/OL]. [2023-11-12]. https://doi.org/10.21203/rs.3.rs-3079277/v1. [4] BENMAD I, DRIOUCH E, KARDOUCHI M. Trajectory planning for data collection in multi-UAV assisted WSNs[C]//2022 IEEE 95th Vehicular Technology Conference: (VTC2022-Spring). Helsinki: IEEE, 2022: 1-6 [5] MENG K T, WU Q Q, MA S D, et al. UAV trajectory and beamforming optimization for integrated periodic sensing and communication[J]. IEEE Wireless Communications Letters, 2022, 11(6): 1211-1215. doi: 10.1109/LWC.2022.3161338 [6] DENG C L, FANG X M, WANG X B. Beamforming design and trajectory optimization for UAV-empowered adaptable integrated sensing and communication[J]. IEEE Transactions on Wireless Communications, 2023, 22(11): 8512-8526. doi: 10.1109/TWC.2023.3264523 [7] WANG X Y, FEI Z S, ZHANG J A, et al. Constrained utility maximization in dual-functional radar-communication multi-UAV networks[J]. IEEE Transactions on Communications, 2021, 69(4): 2660-2672. doi: 10.1109/TCOMM.2020.3044616 [8] LIU W C, JIN Z Z, ZHANG X H, et al. AoI-aware UAV-enabled marine MEC networks with integrated sensing, computation, and communication[C]//2023 IEEE/CIC International Conference on Communications in China (ICCC Workshops). Dalian: IEEE, 2023: 1-6. [9] XU Y, ZHANG T K, LIU Y W, et al. Computation capacity enhancement by joint UAV and RIS design in IoT[J]. IEEE Internet of Things Journal, 2022, 9(20): 20590-20603. doi: 10.1109/JIOT.2022.3178983 [10] XU Y, ZHANG T K, ZOU Y X, et al. Reconfigurable intelligence surface aided UAV-MEC systems with NOMA[J]. IEEE Communications Letters, 2022, 26(9): 2121-2125. doi: 10.1109/LCOMM.2022.3183285 [11] MEI H B, YANG K, SHEN J, et al. Joint trajectory-task-cache optimization with phase-shift design of RIS-assisted UAV for MEC[J]. IEEE Wireless Communications Letters, 2021, 10(7): 1586-1590. doi: 10.1109/LWC.2021.3074990 [12] QIN X T, SONG Z Y, HOU T W, et al. Joint optimization of resource allocation, phase shift, and UAV trajectory for energy-efficient RIS-assisted UAV-enabled MEC systems[J]. IEEE Transactions on Green Communications and Networking, 2023, 7(4): 1778-1792. doi: 10.1109/TGCN.2023.3287604 [13] 向庭立,王红军,杨刚,等. 分布式无人机网络覆盖优化算法[J]. 空军工程大学学报(自然科学版),2019,20(4): 59-65.XIANG Tingli, WANG Hongjun, YANG Gang, et al. Research on distributed UAV network coverage optimization algorithm[J]. Journal of Air Force Engineering University (Natural Science Edition), 2019, 20(4): 59-65. [14] AKRAM T, AWAIS M, NAQVI R, et al. Multicriteria UAV base stations placement for disaster management[J]. IEEE Systems Journal, 2020, 14(3): 3475-3482. doi: 10.1109/JSYST.2020.2970157 [15] KIMURA T, OGURA M. Distributed collaborative 3D-deployment of UAV base stations for on-demand coverage[C]//IEEE INFOCOM 2020-IEEE Conference on Computer Communications. Toronto: IEEE, 2020: 1748-1757. [16] SHAKOOR S, KALEEM Z, DO D T, et al. Joint optimization of UAV 3-D placement and path-loss factor for energy-efficient maximal coverage[J]. IEEE Internet of Things Journal, 2021, 8(12): 9776-9786. doi: 10.1109/JIOT.2020.3019065 [17] VO V N, NGUYEN L M D, TRAN H, et al. Outage probability minimization in secure NOMA cognitive radio systems with UAV relay: a machine learning approach[J]. IEEE Transactions on Cognitive Communications and Networking, 2023, 9(2): 435-451. doi: 10.1109/TCCN.2022.3226184 [18] ANICHO O, CHARLESWORTH P B, BAICHER G S, et al. Comparative study for coordinating multiple unmanned HAPS for communications area coverage[C]//2019 International Conference on Unmanned Aircraft Systems (ICUAS). Atlanta: IEEE, 2019: 467-474. [19] YAN X Z, FANG X M, DENG C L, et al. Joint optimization of resource allocation and trajectory control for mobile group users in fixed-wing UAV-enabled wireless network[J]. IEEE Transactions on Wireless Communications, 2024, 23(2): 1608-1621. doi: 10.1109/TWC.2023.3290748 [20] LIU X, LIU Y W, CHEN Y, et al. Trajectory design and power control for multi-UAV assisted wireless networks: a machine learning approach[J]. IEEE Transactions on Vehicular Technology, 2019, 68(8): 7957-7969. doi: 10.1109/TVT.2019.2920284 [21] MOU Z Y, ZHANG Y, GAO F F, et al. Deep reinforcement learning based three-dimensional area coverage with UAV swarm[J]. IEEE Journal on Selected Areas in Communications, 2021, 39(10): 3160-3176. doi: 10.1109/JSAC.2021.3088718 [22] JIA Y H, ZHOU S B, ZENG Q, et al. The UAV path coverage algorithm based on the greedy strategy and ant colony optimization[J]. Electronics, 2022, 11(17): 2667.1-2667.15. [23] HU W J, YU Y, LIU S M, et al. Multi-UAV coverage path planning: a distributed online cooperation method[J]. IEEE Transactions on Vehicular Technology, 2023, 72(9): 11727-11740. doi: 10.1109/TVT.2023.3266817 [24] 王巍,梁雅静,刘阳,等. 城市灾区无人机网络自适应覆盖优化算法[J]. 计算机工程与应用,2022,58(14): 258-268. doi: 10.3778/j.issn.1002-8331.2010-0211WANG Wei, LIANG Yajing, LIU Yang, et al. Adaptive coverage optimization algorithm for drone network in urban disaster areas[J]. Computer Engineering and Applications, 2022, 58(14): 258-268. doi: 10.3778/j.issn.1002-8331.2010-0211 [25] WANG L, WU X W, WANG Y H, et al. On UAV serving node deployment for temporary coverage in forest environment: a hierarchical deep reinforcement learning approach[J]. Chinese Journal of Electronics, 2023, 32(4): 760-772. doi: 10.23919/cje.2021.00.326 [26] ABEYWICKRAMA H V, HE Y, DUTKIEWICZ E, et al. A reinforcement learning approach for fair user coverage using UAV mounted base stations under energy constraints[J]. IEEE Open Journal of Vehicular Technology, 2020, 1: 67-81. doi: 10.1109/OJVT.2020.2971594 [27] PAN W, LYU N, MIAO J C, et al. Outage probability optimization of UAV relay system based on elliptical trajectory[J]. Wireless Networks, 2023, 29: 3285-3294. doi: 10.1007/s11276-023-03387-5 [28] JIANG X, YIN Z D, WU Z L, et al. Outage probability optimization for UAV-enabled wireless relay networks in fading channels[J]. Physical Communication, 2019, 33: 35-45. doi: 10.1016/j.phycom.2018.12.013 [29] HUA M, WANG Y, ZHANG Z M, et al. Outage probability minimization for low-altitude UAV-enabled full-duplex mobile relaying systems[J]. China Communications, 2018, 15(5): 9-24. doi: 10.1109/CC.2018.8387983 [30] LIU Z X, TIAN Q L, XIE Y A, et al. Outage probability minimization for vehicular networks via joint clustering, UAV trajectory optimization and power allocation[J]. Ad Hoc Networks, 2023, 140(2): 103060.1-103060.11. [31] LIU X, DURRANI T S. Joint multi-UAV deployments for air—ground integrated networks[J]. IEEE Aerospace and Electronic Systems Magazine, 2022, 37(12): 4-12. doi: 10.1109/MAES.2022.3220725 [32] WU Q Q, ZHANG R. Common throughput maximization in UAV-enabled OFDMA systems with delay consideration[J]. IEEE Transactions on Communications, 2018, 66(12): 6614-6627. doi: 10.1109/TCOMM.2018.2865922 [33] DU W B, YING W, YANG P, et al. Network-based heterogeneous particle swarm optimization and its application in UAV communication coverage[J]. IEEE Transactions on Emerging Topics in Computational Intelligence, 2020, 4(3): 312-323. doi: 10.1109/TETCI.2019.2899604 [34] RIFKIN J. The zero marginal cost society: The internet of things, the collaborative commons, and the eclipse of capitalism[J]. The Journal of Sustainable Mobility, 2015, 2: 67-70. doi: 10.9774/GLEAF.2350.2015.de.00007 [35] SERIES M. Framework and overall objectives of the future development of IMT for 2030 and beyond. Source: ITU-R internal document [EB/OL]. [2023-11-12]. https://www.itu.int/md/meetingdoc.asp?lang=en&parent=R19SG05-C-0131. [36] ZHANG J A, LIU F, MASOUROS C, et al. An overview of signal processing techniques for joint communication and radar sensing[J]. IEEE Journal of Selected Topics in Signal Processing, 2021, 15(6): 1295-1315. doi: 10.1109/JSTSP.2021.3113120 [37] LIU F, MASOUROS C, PETROPULU A P, et al. Joint radar and communication design: applications, state-of-the-art, and the road ahead[J]. IEEE Transactions on Communications, 2020, 68(6): 3834-3862. doi: 10.1109/TCOMM.2020.2973976 [38] ALNOMAN A, SHARMA S K, EJAZ W, et al. Emerging edge computing technologies for distributed IoT systems[J]. IEEE Network, 2019, 33(6): 140-147. doi: 10.1109/MNET.2019.1800543 [39] TRAN T X, HAJISAMI A, PANDEY P, et al. Collaborative mobile edge computing in 5G networks: new paradigms, scenarios, and challenges[J]. IEEE Communications Magazine, 2017, 55(4): 54-61. doi: 10.1109/MCOM.2017.1600863 [40] WANG Y G, WANG H, WEI X L. Energy-efficient UAV deployment and task scheduling in multi-UAV edge computing[C]//2020 International Conference on Wireless Communications and Signal Processing (WCSP). Nanjing: IEEE, 2020: 1147-1152. [41] XU Y J, ZHOU H, DENG Y S. Task-oriented semantics-aware communication for wireless UAV control and command transmission[J]. IEEE Communications Letters, 2023, 27(8): 2232-2236. doi: 10.1109/LCOMM.2023.3290109 [42] ZHOU J S, TIAN D X, SHENG Z G, et al. Joint mobility, communication and computation optimization for UAVs in air-ground cooperative networks[J]. IEEE Transactions on Vehicular Technology, 2021, 70(3): 2493-2507. doi: 10.1109/TVT.2021.3059964 [43] LIU Z W, CAO Y, GAO P, et al. Multi-UAV network assisted intelligent edge computing: challenges and opportunities[J]. China Communications, 2022, 19(3): 258-278. doi: 10.23919/JCC.2022.03.019 [44] WANG Y T, GUO H Z, LIU J J. Cooperative task offloading in UAV swarm-based edge computing[C]//2021 IEEE Global Communications Conference (GLOBECOM). Madrid: IEEE, 2021: 1-6. [45] LYU Z H, ZHU G X, XU J. Joint maneuver and beamforming design for UAV-enabled integrated sensing and communication[J]. IEEE Transactions on Wireless Communications, 2023, 22(4): 2424-2440. doi: 10.1109/TWC.2022.3211533 [46] JING X Y, LIU F, MASOUROS C, et al. ISAC from the sky: UAV trajectory design for joint communication and target localization[EB/OL]. [2023-11-12]. https://arxiv.org/abs/2207.02904. [47] LIU Y, ZHOU J S, TIAN D X, et al. Joint communication and computation resource scheduling of a UAV-assisted mobile edge computing system for platooning vehicles[J]. IEEE Transactions on Intelligent Transportation Systems, 2022, 23(7): 8435-8450. doi: 10.1109/TITS.2021.3082539 [48] CHENG K J, FANG X M, WANG X B. Energy efficient edge computing and data compression collaboration scheme for UAV-assisted network[J]. IEEE Transactions on Vehicular Technology, 2023, 72(12): 16395-16408. doi: 10.1109/TVT.2023.3289962 [49] XIONG J Y, GUO H Z, LIU J J. Task offloading in UAV-aided edge computing: bit allocation and trajectory optimization[J]. IEEE Communications Letters, 2019, 23(3): 538-541. doi: 10.1109/LCOMM.2019.2891662 [50] GUO F X, ZHANG H L, JI H, et al. Joint trajectory and computation offloading optimization for UAV-assisted MEC with NOMA[C]//IEEE INFOCOM 2019 - IEEE Conference on Computer Communications Workshops (INFOCOM WKSHPS). Paris: IEEE, 2019: 1-6. [51] XIA J M, WANG P, LI B, et al. Intelligent task offloading and collaborative computation in multi-UAV-enabled mobile edge computing[J]. China Communications, 2022, 19(4): 244-256. doi: 10.23919/JCC.2022.04.018 [52] QIN Y H, ZHANG Z S, LI X L, et al. Deep reinforcement learning based resource allocation and trajectory planning in integrated sensing and communications UAV network[J]. IEEE Transactions on Wireless Communications, 2023, 22(11): 8158-8169. doi: 10.1109/TWC.2023.3260304 [53] OUYANG W J, MU J S, ZHANG R H, et al. Intelligent fusion of integrated sensing and communication signal on the UAV platform[C]//2022 IEEE/CIC International Conference on Communications in China (ICCC Workshops). Foshan: IEEE, 2022: 483-487. [54] WANG M, CHEN P, CAO Z X, et al. Reinforcement learning-based UAVs resource allocation for integrated sensing and communication (ISAC) system[J]. Electronics, 2022, 11(3): 441.1-441.15. [55] ZHOU G, PAN C H, REN H, et al. Robust beamforming design for intelligent reflecting surface aided MISO communication systems[J]. IEEE Wireless Communications Letters, 2020, 9(10): 1658-1662. doi: 10.1109/LWC.2020.3000490 [56] WU Q Q, ZHANG R. Towards smart and reconfigurable environment: intelligent reflecting surface aided wireless network[J]. IEEE Communications Magazine, 2020, 58(1): 106-112. doi: 10.1109/MCOM.001.1900107 [57] WU Q Q, ZHANG S W, ZHENG B X, et al. Intelligent reflecting surface-aided wireless communications: a tutorial[J]. IEEE Transactions on Communications, 2021, 69(5): 3313-3351. doi: 10.1109/TCOMM.2021.3051897 [58] SU Y H, PANG X W, LU W D, et al. Joint location and beamforming optimization for STAR-RIS aided NOMA-UAV networks[J]. IEEE Transactions on Vehicular Technology, 2023, 72(8): 11023-11028. doi: 10.1109/TVT.2023.3261324 [59] ZHANG Q, ZHAO Y, LI H, et al. Joint optimization of STAR-RIS assisted UAV communication systems[J]. IEEE Wireless Communications Letters,2022,11(11):2390-2394. [60] NGUYEN K K, MASARACCHIA A, SHARMA V, et al. RIS-assisted UAV communications for IoT with wireless power transfer using deep reinforcement learning[J]. IEEE Journal of Selected Topics in Signal Processing, 2022, 16(5): 1086-1096. doi: 10.1109/JSTSP.2022.3172587 [61] FAN X K, LIU M, CHEN Y L, et al. RIS-assisted UAV for fresh data collection in 3D urban environments: a deep reinforcement learning approach[J]. IEEE Transactions on Vehicular Technology, 2023, 72(1): 632-647. doi: 10.1109/TVT.2022.3203008 [62] YANG B W, YU Y, LI J Q, et al. An AoI-guaranteed sensor data collection strategy for RIS-assisted UAV communication system[C]//2023 IEEE/CIC International Conference on Communications in China (ICCC). Dalian: IEEE, 2023: 1-6. [63] REN H, ZHANG Z K, PENG Z J, et al. Energy minimization in RIS-assisted UAV-enabled wireless power transfer systems[J]. IEEE Internet of Things Journal,2023,10(7):5794-5809. [64] LIU Q L, HAN J, LIU Q. Joint task offloading and resource allocation for RIS-assisted UAV for mobile edge computing networks[C]//2023 IEEE/CIC International Conference on Communications in China (ICCC). Dalian: IEEE, 2023: 1-6. [65] ZHAI Z Y, DAI X H, DUO B, et al. Energy-efficient UAV-mounted RIS assisted mobile edge computing[J]. IEEE Wireless Communications Letters, 2022, 11(12): 2507-2511. doi: 10.1109/LWC.2022.3206587 [66] DUO B, HE M L, WU Q Q, et al. Joint dual-UAV trajectory and RIS design for ARIS-assisted aerial computing in IoT[J]. IEEE Internet of Things Journal, 2023, 10(22): 19584-19594. doi: 10.1109/JIOT.2023.3288213 [67] LIU Z H, WANG X K, SHEN L C, et al. Mission-oriented miniature fixed-wing UAV swarms: a multilayered and distributed architecture[J]. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2022, 52(3): 1588-1602. [68] DING Y L, XIN B, CHEN J. Curvature-constrained path elongation with expected length for Dubins vehicle[J]. Automatica, 2019, 108: 108495.1-108495.17. [69] XIAO Y, YE Y, HUANG S C, et al. Fully decentralized federated learning-based on-board mission for UAV swarm system[J]. IEEE Communications Letters, 2021, 25(10): 3296-3300. doi: 10.1109/LCOMM.2021.3095362 [70] HOU X W, WANG J J, JIANG C X, et al. UAV-enabled covert federated learning[J]. IEEE Transactions on Wireless Communications, 2023, 22(10): 6793-6809. doi: 10.1109/TWC.2023.3245621 [71] TANG J H, NIE J T, ZHANG Y, et al. Multi-UAV-assisted federated learning for energy-aware distributed edge training[J]. IEEE Transactions on Network and Service Management, 2024, 21(1): 280-294. doi: 10.1109/TNSM.2023.3298220 [72] DONG F Y, LI L P, LU Z M, et al. Energy-efficiency for fixed-wing UAV-enabled data collection and forwarding[C]//2019 IEEE International Conference on Communications Workshops (ICC Workshops). Shanghai: IEEE, 2019: 1-6. [73] YOON J, LEE A H, LEE H. Rendezvous: opportunistic data delivery to mobile users by UAVs through target trajectory prediction[J]. IEEE Transactions on Vehicular Technology, 2020, 69(2): 2230-2245. doi: 10.1109/TVT.2019.2962391 [74] LIU J J, KATO N, MA J F, et al. Throughput and delay tradeoffs for mobile Ad Hoc networks with reference point group mobility[J]. IEEE Transactions on Wireless Communications, 2015, 14(3): 1266-1279. doi: 10.1109/TWC.2014.2365553 [75] WANG Y, LI Z D, CHEN Y B, et al. Joint resource allocation and UAV trajectory optimization for space–air–ground Internet of remote things networks[J]. IEEE Systems Journal, 2021, 15(4): 4745-4755. doi: 10.1109/JSYST.2020.3019463 [76] 曾晓婉,王海军,马东堂,等. 面向最大化服务用户数的无人机基站3D部署方法[J]. 电讯技术,2023,63(11): 1732-1741.ZENG Xiaowan, WANG Haijun, MA Dongtang, et al. A UAV base station 3D deployment method for maximum users served[J]. Telecommunication Engineering, 2023, 63(11): 1732-1741. [77] LI R D, WEI Z Q, YANG L, et al. Resource allocation for secure multi-UAV communication systems with multi-eavesdropper[J]. IEEE Transactions on Communications, 2020, 68(7): 4490-4506. doi: 10.1109/TCOMM.2020.2983040 [78] ZHANG Y, MOU Z Y, GAO F F, et al. UAV-enabled secure communications by multi-agent deep reinforcement learning[J]. IEEE Transactions on Vehicular Technology, 2020, 69(10): 11599-11611. doi: 10.1109/TVT.2020.3014788 [79] YANG H L, ZHAO J, XIONG Z H, et al. Privacy-preserving federated learning for UAV-enabled networks: learning-based joint scheduling and resource management[J]. IEEE Journal on Selected Areas in Communications, 2021, 39(10): 3144-3159. doi: 10.1109/JSAC.2021.3088655 [80] LIN Y, WANG M Y, ZHOU X L, et al. Dynamic spectrum interaction of UAV flight formation communication with priority: a deep reinforcement learning approach[J]. IEEE Transactions on Cognitive Communications and Networking, 2020, 6(3): 892-903 doi: 10.1109/TCCN.2020.2973376 [81] OUAHOUAH S, BAGAA M, PRADOS-GARZON J, et al. Deep-reinforcement-learning-based collision avoidance in UAV environment[J]. IEEE Internet of Things Journal, 2022, 9(6): 4015-4030. doi: 10.1109/JIOT.2021.3118949 -

 下载:
下载:

 点击查看大图
点击查看大图
计量
- 文章访问数: 1848
- HTML全文浏览量: 668
- PDF下载量: 391
- 被引次数: 0