

Joint Optimization of Resource Allocation and Deployment Location in Unmanned Aerial Vehicle-Assisted Communication
-
摘要:
为提升基于正交频分多址接入模式无人机辅助无线通信系统的网络性能,首先,以提升用户的公平性为系统方案设计指标,将包括子信道分配、调制模式选择、功率分配等通信资源和无人机位置联合建模为一个混合整数非线性优化问题;进一步,利用迭代优化的方式解决变量耦合性及非凸性等问题,将最大-最小问题转换为两个子问题:子信道分配和调制方式选择联合优化、无人机位置和子信道功率联合优化;然后,通过适当变换将子信道分配和调制方式选择联合优化建模为0-1线性优化问题进行求解,而无人机位置和子信道功率联合优化建模为凸优化问题求解;最后,进行实验仿真验证. 研究结果表明,所提联合优化算法相比基本方案可有效提升网络用户的公平性.
Abstract:To enhance the performance of the unmanned aerial vehicle (UAV)-assisted communication network based on the orthogonal frequency division multiple access (OFDMA) mode, the rational network allocation and optimal allocation of communication resources were studied. Firstly, in order to maximize the fairness of the network, a mixed-integer nonlinear maximum-minimum optimization problem was modeled by combining the communication resources including sub-channel allocation, modulation mode selection, and power allocation with UAV position. Then, the iterative optimization method was used to solve the problems of variable coupling and non-convex, and the maximum-minimum problem was converted into two sub-problems: joint optimization of sub-channel allocation and modulation mode selection and joint optimization of UAV position and sub-channel power. Finally, by means of appropriate transformations, the two subproblems were modeled into 0–1 linear optimization problem and convex optimization problem for solution. The experimental simulation results show that the proposed algorithm can jointly optimize multidimensional system parameters such as network allocation and communication resources, effectively enhance the fairness of network users, and improve network performance compared with other benchmark schemes.
-
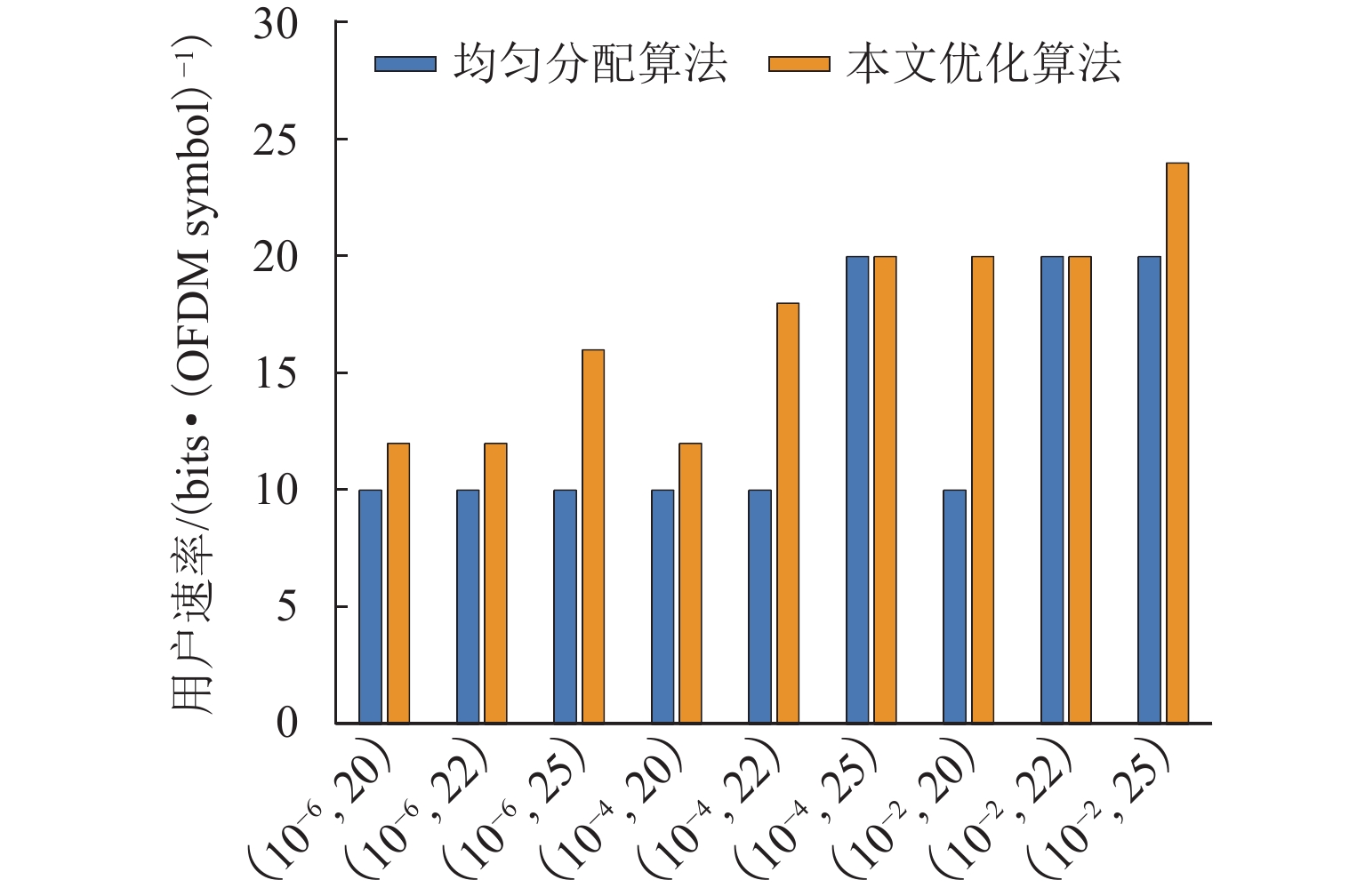
图 7 不同误码率及发射功率下最小获取用户速率
Figure 7. Minimum achievable user rates with different BERs and transmitted powers
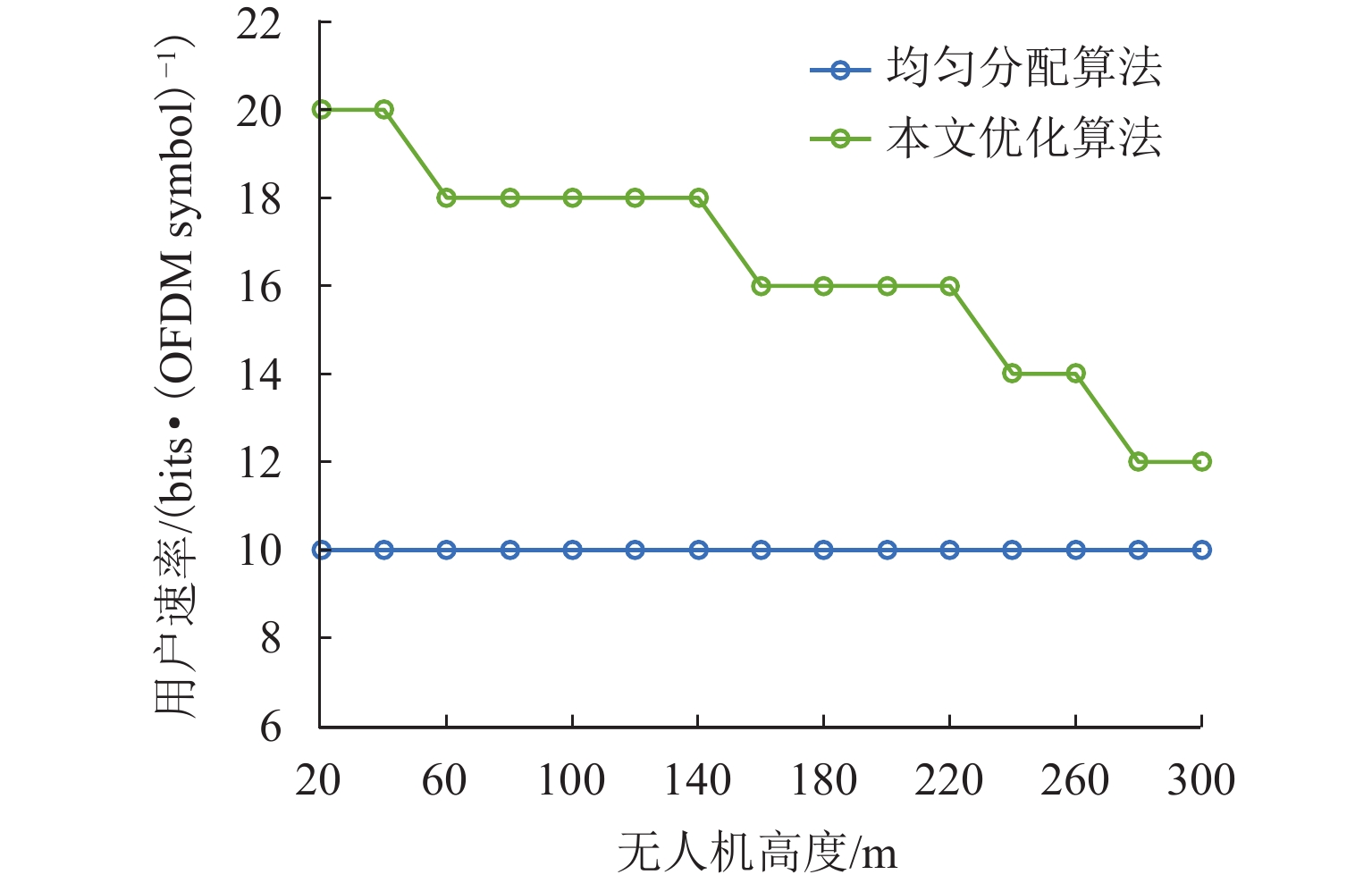
图 8 不同无人机高度下的用户最小获取信息速率
Figure 8. Minimum achievable user rates under different UAV heights
表 1 部分关键系统仿真参数
Table 1. Some key system simulation parameters
参数 数值 $ M $/个 20 $ H $/m 100 $ N $/个 100 $ B $/MHz 10 $ {\beta _0} $/dB −50 $ \delta _0^2 $/(dBm·Hz−1) −169 $ P_{\max }^{\mathrm{e}} $ $ {10^{ - 4}} $ $ {P_{\mathrm{T}}} $/dBm 22  下载: 导出CSV
下载: 导出CSV
-
[1] VEGNI A M, LOSCRÍ V, CALAFATE C T, et al. Communication technologies enabling effective UAV networks: a standards perspective[J]. IEEE Communications Standards Magazine, 2021, 5(4): 33-40. doi: 10.1109/MCOMSTD.0001.2000074 [2] XIONG F, LI A J, WANG H, et al. An SDN-MQTT based communication system for battlefield UAV swarms[J]. IEEE Communications Magazine, 2019, 57(8): 41-47. doi: 10.1109/MCOM.2019.1900291 [3] WOLF S, COOLEY R, FANTL J, et al. Secure and resilient swarms: autonomous decentralized lightweight UAVs to the rescue[J]. IEEE Consumer Electronics Magazine, 2020, 9(4): 34-40. doi: 10.1109/MCE.2020.2969174 [4] SHANG B D, MAROJEVIC V, YI Y, et al. Spectrum sharing for UAV communications: spatial spectrum sensing and open issues[J]. IEEE Vehicular Technology Magazine, 2020, 15(2): 104-112. doi: 10.1109/MVT.2020.2980020 [5] SHANG B D, BENTLEY E S, LIU L J. UAV swarm-enabled aerial reconfigurable intelligent surface: modeling, analysis, and optimization[J]. IEEE Transactions on Communications, 2023, 71(6): 3621-3636. doi: 10.1109/TCOMM.2022.3173369 [6] HUANG Y, WU Q Q, LU R, et al. Massive MIMO for cellular-connected UAV: challenges and promising solutions[J]. IEEE Communications Magazine, 2021, 59(2): 84-90. doi: 10.1109/MCOM.001.2000552 [7] NGUYEN M D, LE L B, GIRARD A. Integrated UAV trajectory control and resource allocation for UAV-based wireless networks with co-channel interference management[J]. IEEE Internet of Things Journal, 2022, 9(14): 12754-12769. doi: 10.1109/JIOT.2021.3138374 [8] MENG K T, WU Q Q, MA S D, et al. UAV trajectory and beamforming optimization for integrated periodic sensing and communication[J]. IEEE Wireless Communications Letters, 2022, 11(6): 1211-1215. doi: 10.1109/LWC.2022.3161338 [9] WANG J, LIU M, SUN J L, et al. Multiple unmanned-aerial-vehicles deployment and user pairing for nonorthogonal multiple access schemes[J]. IEEE Internet of Things Journal, 2021, 8(3): 1883-1895. doi: 10.1109/JIOT.2020.3015702 [10] WU Q Q, ZENG Y, ZHANG R. Joint trajectory and communication design for multi-UAV enabled wireless networks[J]. IEEE Transactions on Wireless Communications, 2018, 17(3): 2109-2121. doi: 10.1109/TWC.2017.2789293 [11] HUANG Y Q, CUI M, ZHANG G C, et al. Bandwidth, power and trajectory optimization for UAV base station networks with backhaul and user QoS constraints[J]. IEEE Access, 2020, 8: 67625-67634. doi: 10.1109/ACCESS.2020.2986075 [12] CHEN J X, WU Q H, XU Y H, et al. Spectrum allocation for task-driven UAV communication networks exploiting game theory[J]. IEEE Wireless Communications, 2021, 28(4): 174-181. doi: 10.1109/MWC.001.2000444 [13] LIU T Y, CUI M, ZHANG G C, et al. 3D trajectory and transmit power optimization for UAV-enabled multi-link relaying systems[J]. IEEE Transactions on Green Communications and Networking, 2021, 5(1): 392-405. doi: 10.1109/TGCN.2020.3048135 [14] ZHANG G C, OU X Q, CUI M, et al. Cooperative UAV enabled relaying systems: joint trajectory and transmit power optimization[J]. IEEE Transactions on Green Communications and Networking, 2022, 6(1): 543-557. doi: 10.1109/TGCN.2021.3108147 [15] KUMARI S, SRINIVAS K K, KUMAR P. Channel and carrier frequency offset equalization for OFDM based UAV communications using deep learning[J]. IEEE Communications Letters, 2021, 25(3): 850-853. doi: 10.1109/LCOMM.2020.3036493 [16] PAN X, YAN C X, ZHANG J K. Nonlinearity-based single-channel monopulse tracking method for OFDM-aided UAV A2G communications[J]. IEEE Access, 2019, 7: 148485-148494. doi: 10.1109/ACCESS.2019.2946960 [17] WU Q Q, ZHANG R. Common throughput maximization in UAV-enabled OFDMA systems with delay consideration[J]. IEEE Transactions on Communications, 2018, 66(12): 6614-6627. doi: 10.1109/TCOMM.2018.2865922 [18] ZENG S H, ZHANG H L, DI B Y, et al. Trajectory optimization and resource allocation for OFDMA UAV relay networks[J]. IEEE Transactions on Wireless Communications, 2021, 20(10): 6634-6647. doi: 10.1109/TWC.2021.3075594 [19] WEI Z Q, CAI Y X, SUN Z, et al. Sum-rate maximization for IRS-assisted UAV OFDMA communication systems[J]. IEEE Transactions on Wireless Communications, 2021, 20(4): 2530-2550. doi: 10.1109/TWC.2020.3042977 [20] LI S C, ZHANG N, CHEN H B, et al. Joint subcarrier allocation, modulation mode selection, and trajectory design in a UAV-based OFDMA network[J]. IEEE Communications Letters, 2022, 26(9): 2111-2115. doi: 10.1109/LCOMM.2022.3182016 [21] HOU J C, DENG Y S, SHIKH-BAHAEI M. Joint beamforming, user association, and height control for cellular-enabled UAV communications[J]. IEEE Transactions on Communications, 2021, 69(6): 3598-3613. doi: 10.1109/TCOMM.2021.3063775 [22] CHEN J X, WU Q H, XU Y H, et al. Joint task assignment and spectrum allocation in heterogeneous UAV communication networks: a coalition formation game-theoretic approach[J]. IEEE Transactions on Wireless Communications, 2021, 20(1): 440-452. doi: 10.1109/TWC.2020.3025316 [23] PHAM Q V, IRADUKUNDA N, TRAN N H, et al. Joint placement, power control, and spectrum allocation for UAV wireless backhaul networks[J]. IEEE Networking Letters, 2021, 3(2): 56-60. doi: 10.1109/LNET.2021.3065943 [24] ZHOU Y F, ZHOU F H, ZHOU H L, et al. Robust trajectory and transmit power optimization for secure UAV-enabled cognitive radio networks[J]. IEEE Transactions on Communications, 2020, 68(7): 4022-4034. doi: 10.1109/TCOMM.2020.2979977 [25] WONG C Y, CHENG R S, LATAIEF K B, et al. Multiuser OFDM with adaptive subcarrier, bit, and power allocation[J]. IEEE Journal on Selected Areas in Communications, 1999, 17(10): 1747-1758. doi: 10.1109/49.793310 [26] LIU B Y, WAN Y Y, ZHOU F H, et al. Resource allocation and trajectory design for MISO UAV-assisted MEC networks[J]. IEEE Transactions on Vehicular Technology, 2022, 71(5): 4933-4948. doi: 10.1109/TVT.2022.3140833 -

 下载:
下载:


 点击查看大图
点击查看大图
计量
- 文章访问数: 1221
- HTML全文浏览量: 352
- PDF下载量: 173
- 被引次数: 0