

Calculation Method of Magnetic Force of Hybrid Electromagnets Based on Nonlinear Inductance
-
摘要:
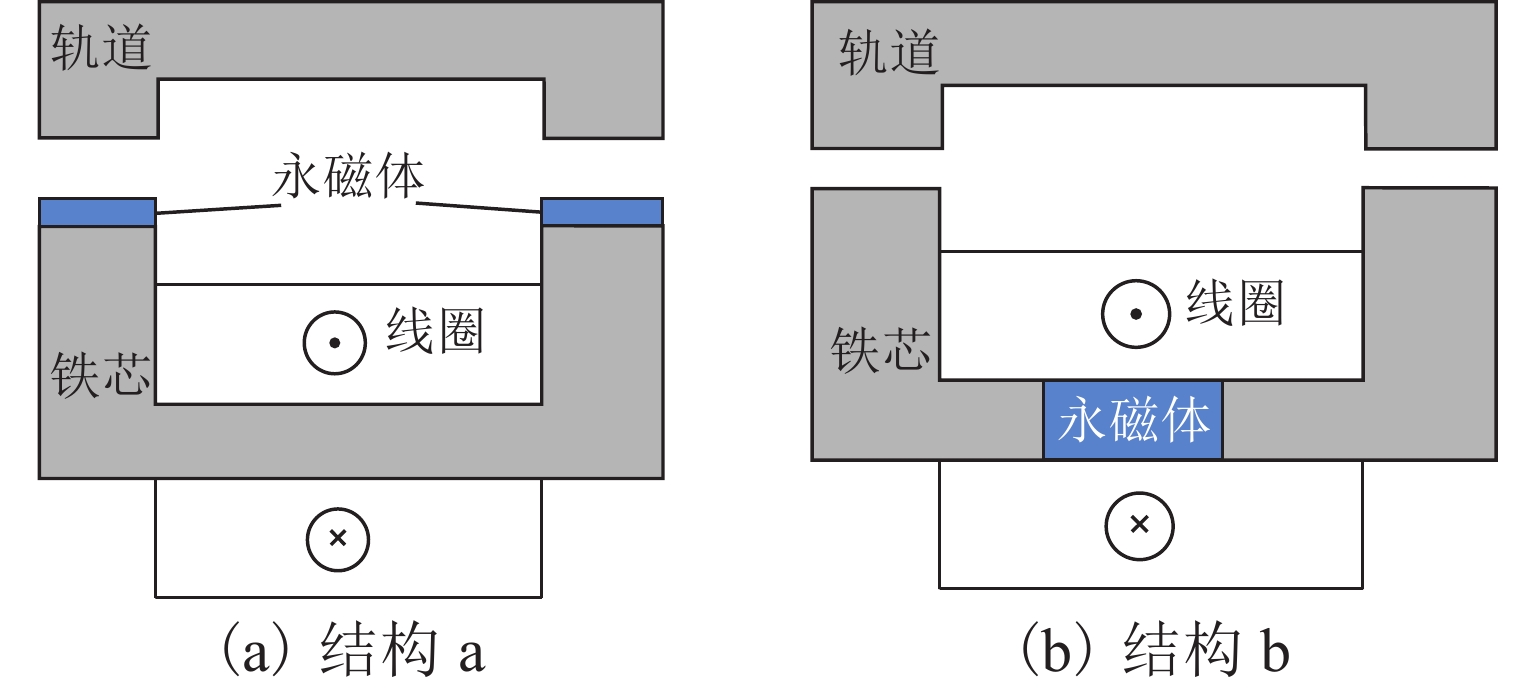
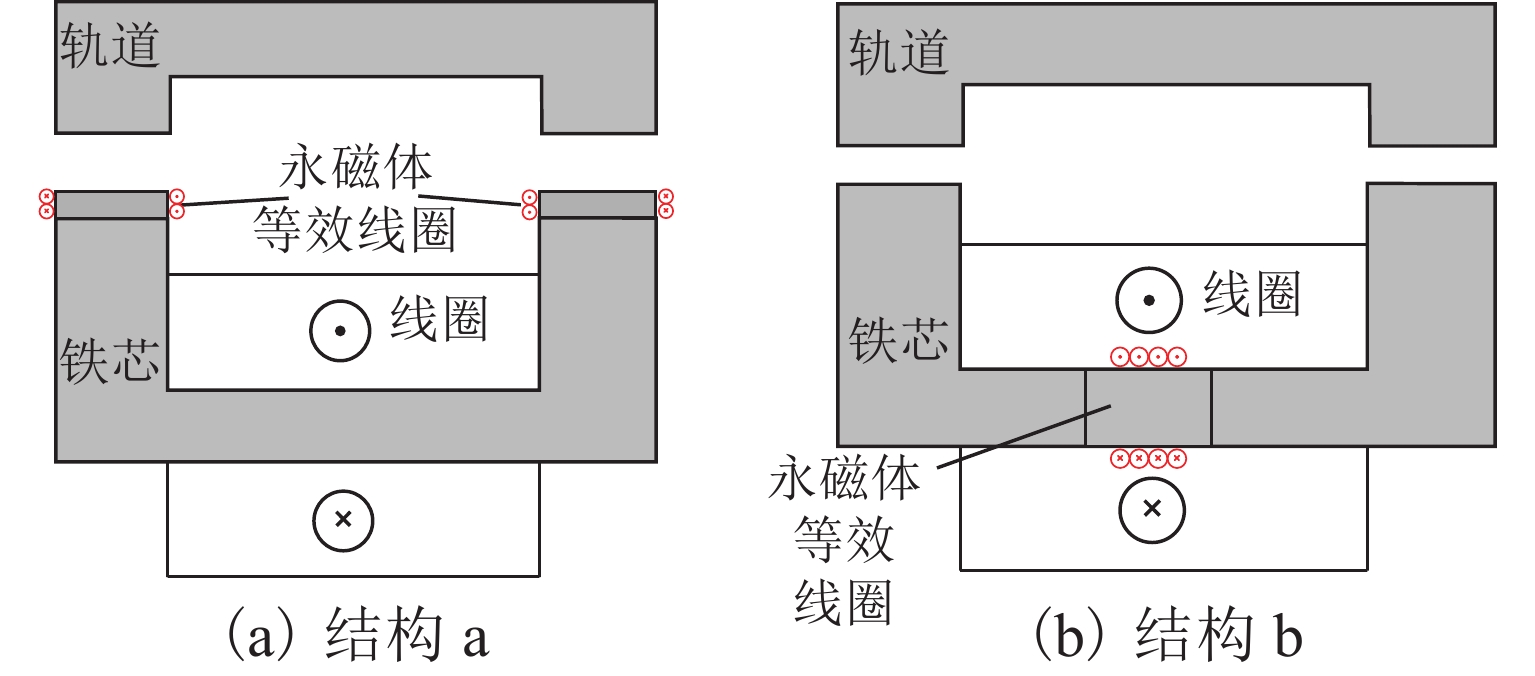
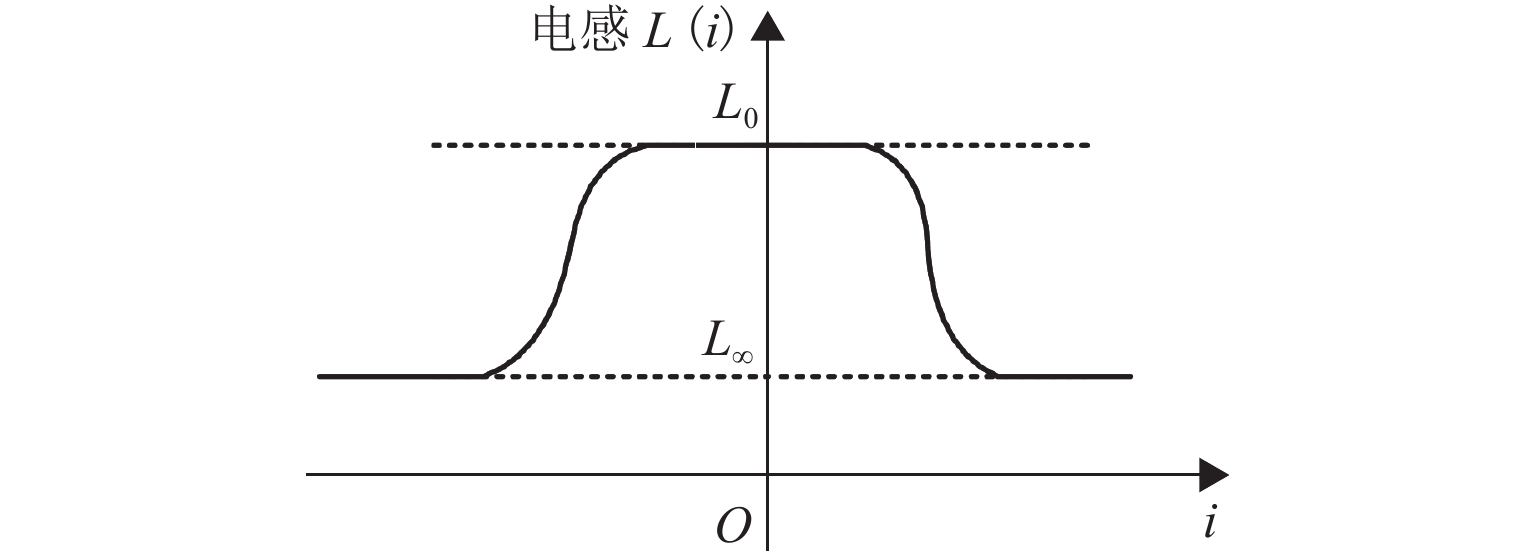
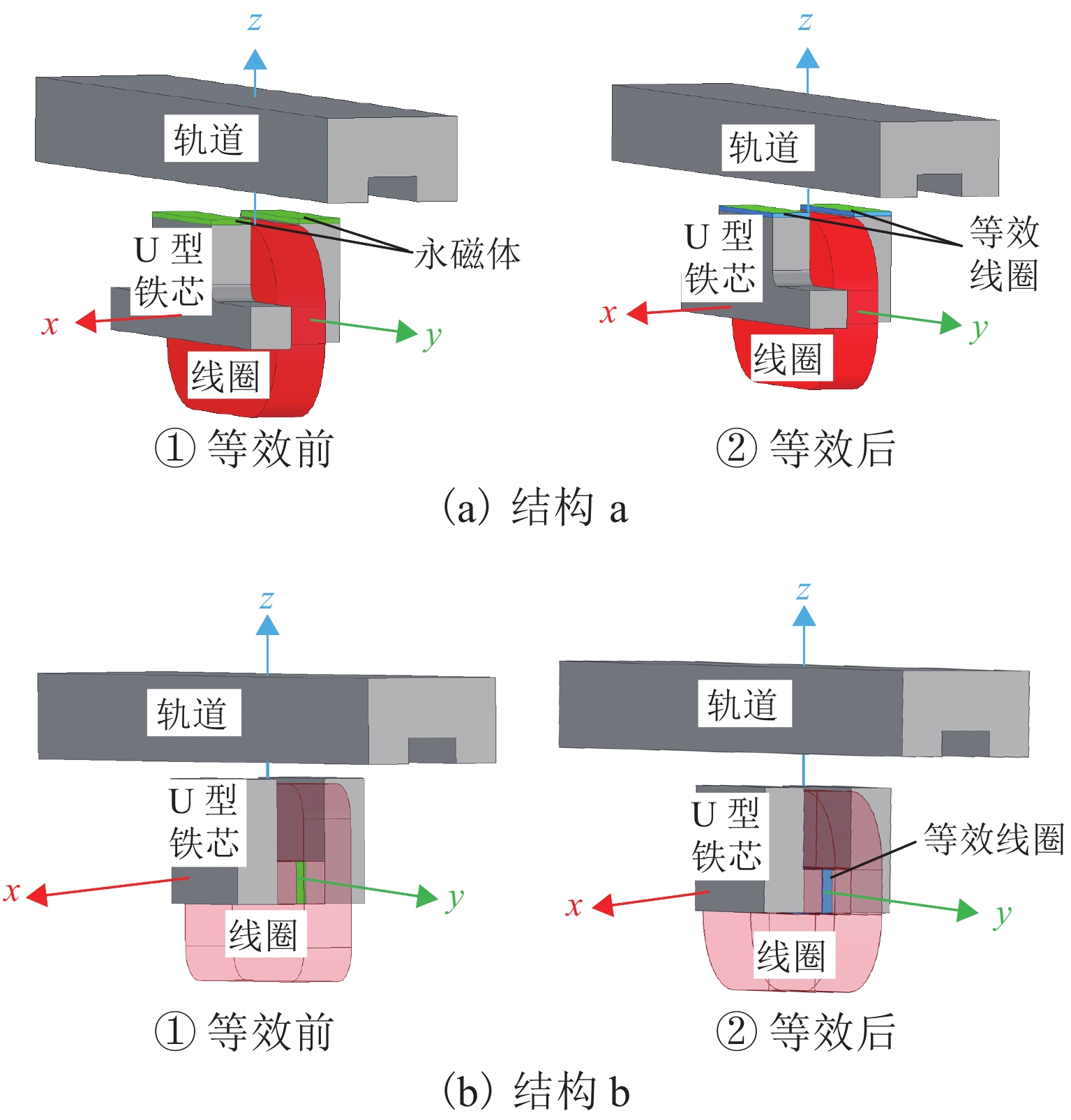
为提高混合电磁铁磁力计算的准确性和效率,综合考虑解析法计算速度快和有限元法计算精度高的优势,提出一种基于非线性电感的混合电磁铁磁力计算方法. 首先,分析混合电磁铁电感与电流的关系,建立考虑磁饱和的非线性电感模型;然后,采用等效面电流法,将 2 种典型的混合电磁铁结构(结构a、结构b)等效为多电磁线圈的纯电磁铁结构,进而利用能量平衡法推导出通用于串联磁路型混合电磁铁磁力表达式,其中非线性电感的参数变量由有限元仿真法拟合得到. 研究结果表明:结构 a 和结构 b 利用本文所述方法得到的电磁力计算结果与传统有限元仿真结果的平均偏差为2.54%和2.37%,结构a与实验测量的平均偏差为2.63%,且与传统有限元法相比,计算效率极大提升,即本文所述方法通过较少任务的有限元仿真得到远高于现有解析公式准确性的电磁力计算结果.
Abstract:In order to improve the accuracy and efficiency of the magnetic force calculation of hybrid electromagnets, this paper took into account the advantages of fast calculation speed of the analytical method and high calculation accuracy of the finite element method and proposed a calculation method of the magnetic force of hybrid electromagnets based on the nonlinear inductance. The paper first analyzed the relationship between the inductance and current of the hybrid electromagnet and established a nonlinear inductance model considering magnetic saturation. Then, the equivalent surface current method was used to equate two typical hybrid electromagnet structures (structure a, structure b) into pure electromagnet structures with multi-electromagnetic coils. The magnetic force expression of the series magnetic circuit type hybrid electromagnet was derived by using the energy balance method, in which the parameter variables of the nonlinear inductance model were fitted by the finite element simulation method. The research results show that the average deviations between the electromagnetic force calculation results of structures a and b obtained by the proposed method and the traditional finite element simulation are 2.54% and 2.37%, and the average deviation between structure a and experimental measurement is 2.63%. Compared with the traditional finite element method, the calculation efficiency is greatly improved. In other words, the proposed method obtains electromagnetic force calculation results that are much more accurate than the existing analytical formulas through finite element simulation with fewer tasks.
-
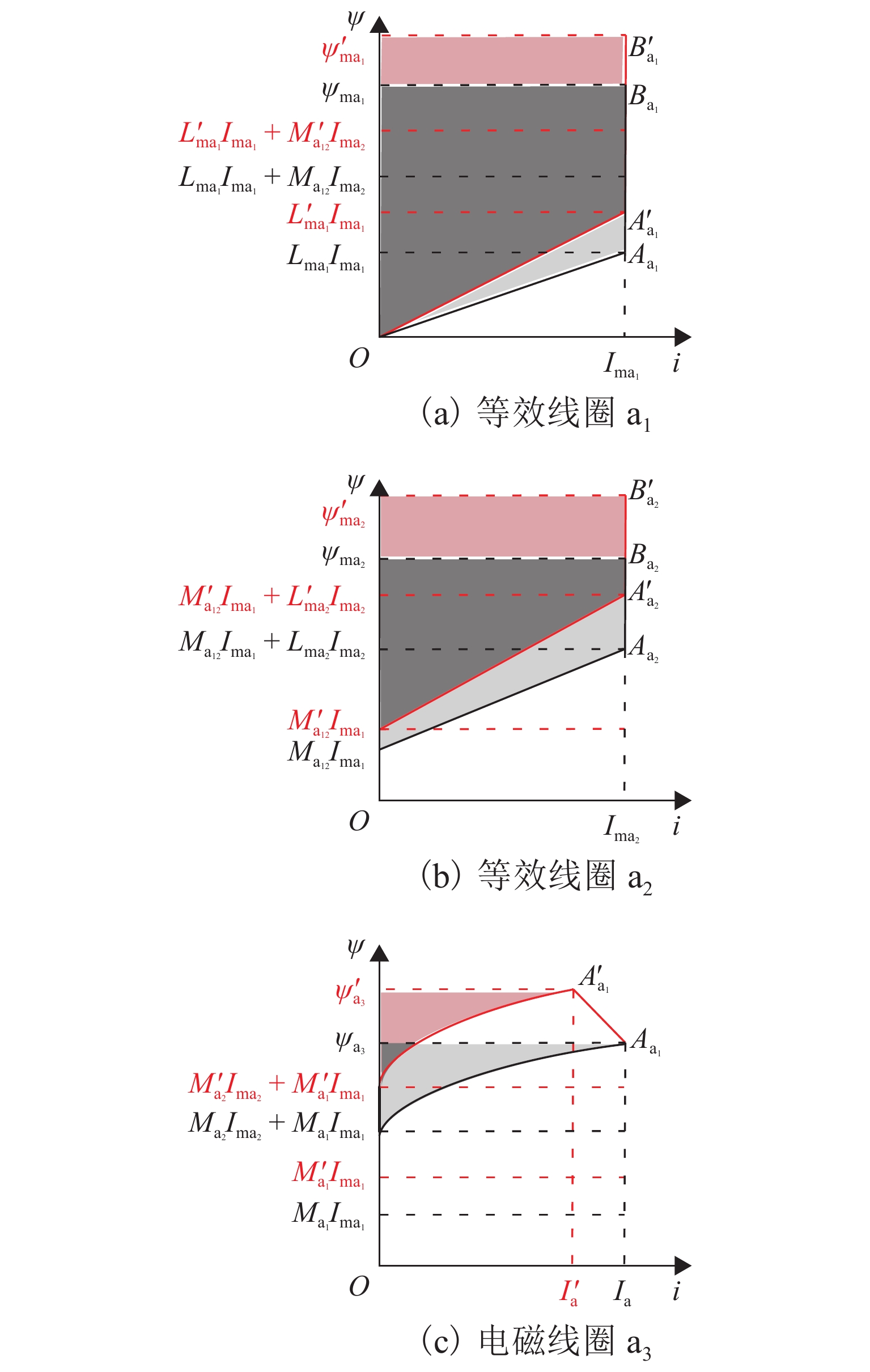
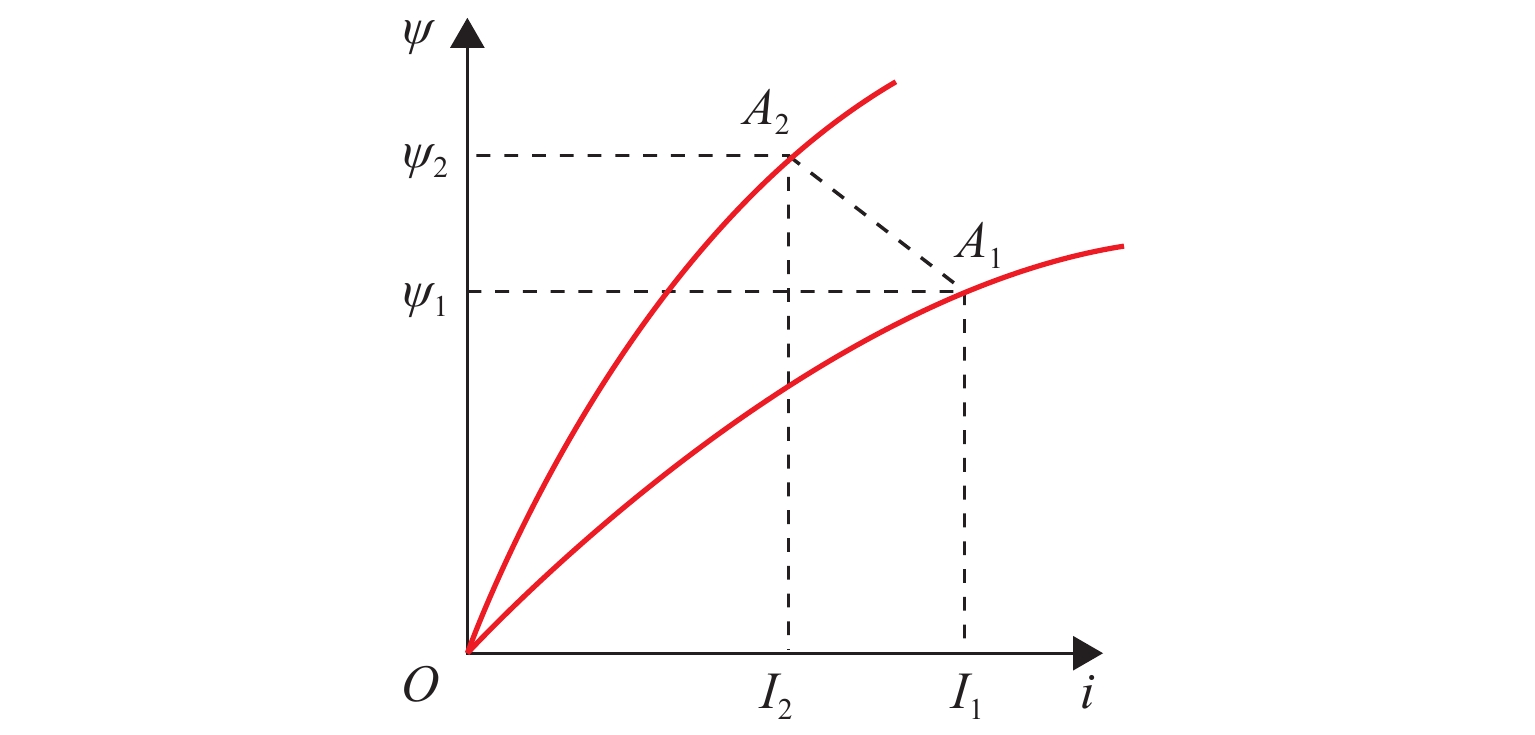
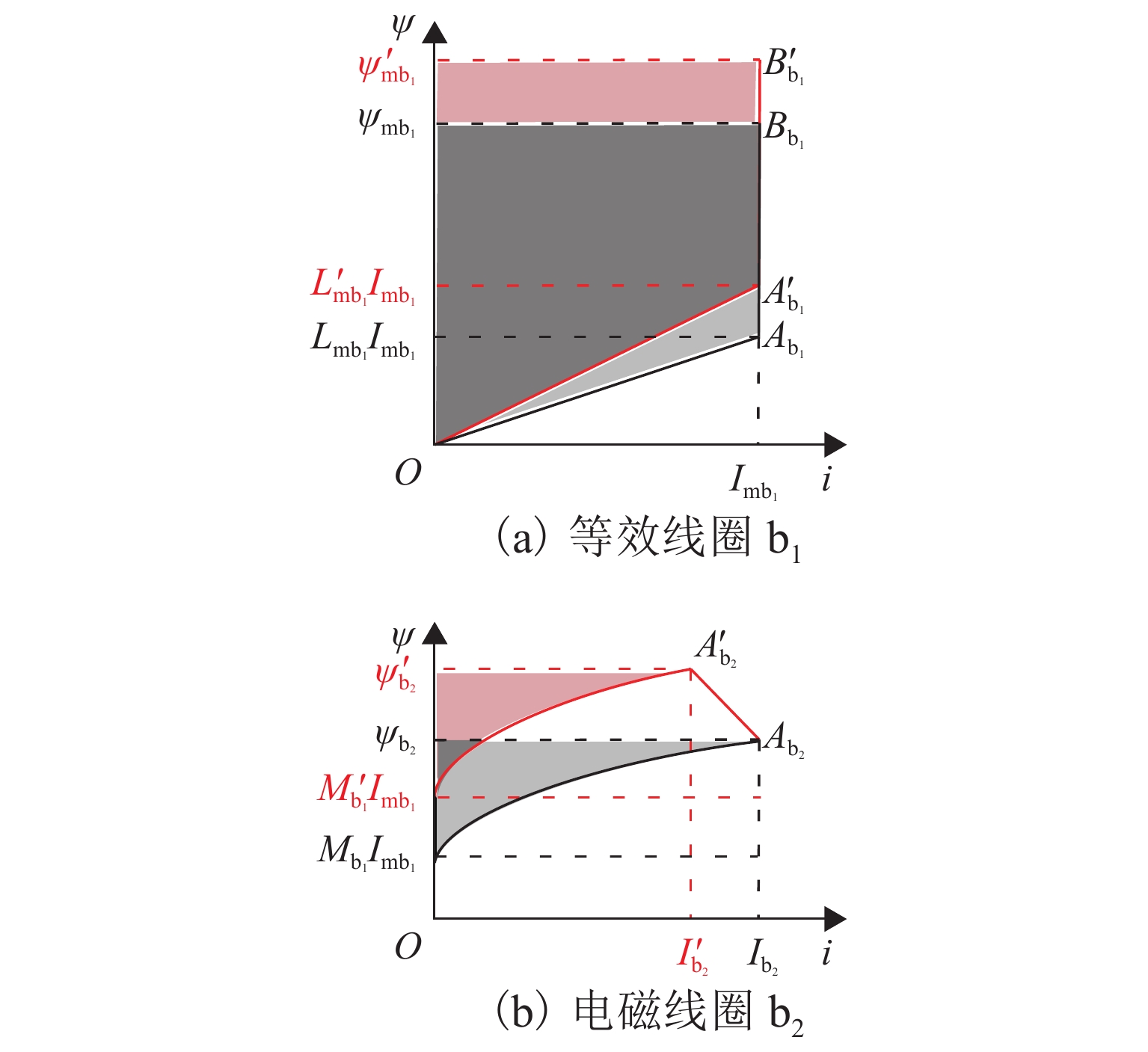
图 7 气隙z运动到z1时线圈磁链-电流曲线
Figure 7. Flux-current curves of coil when the air gap z moves to z1
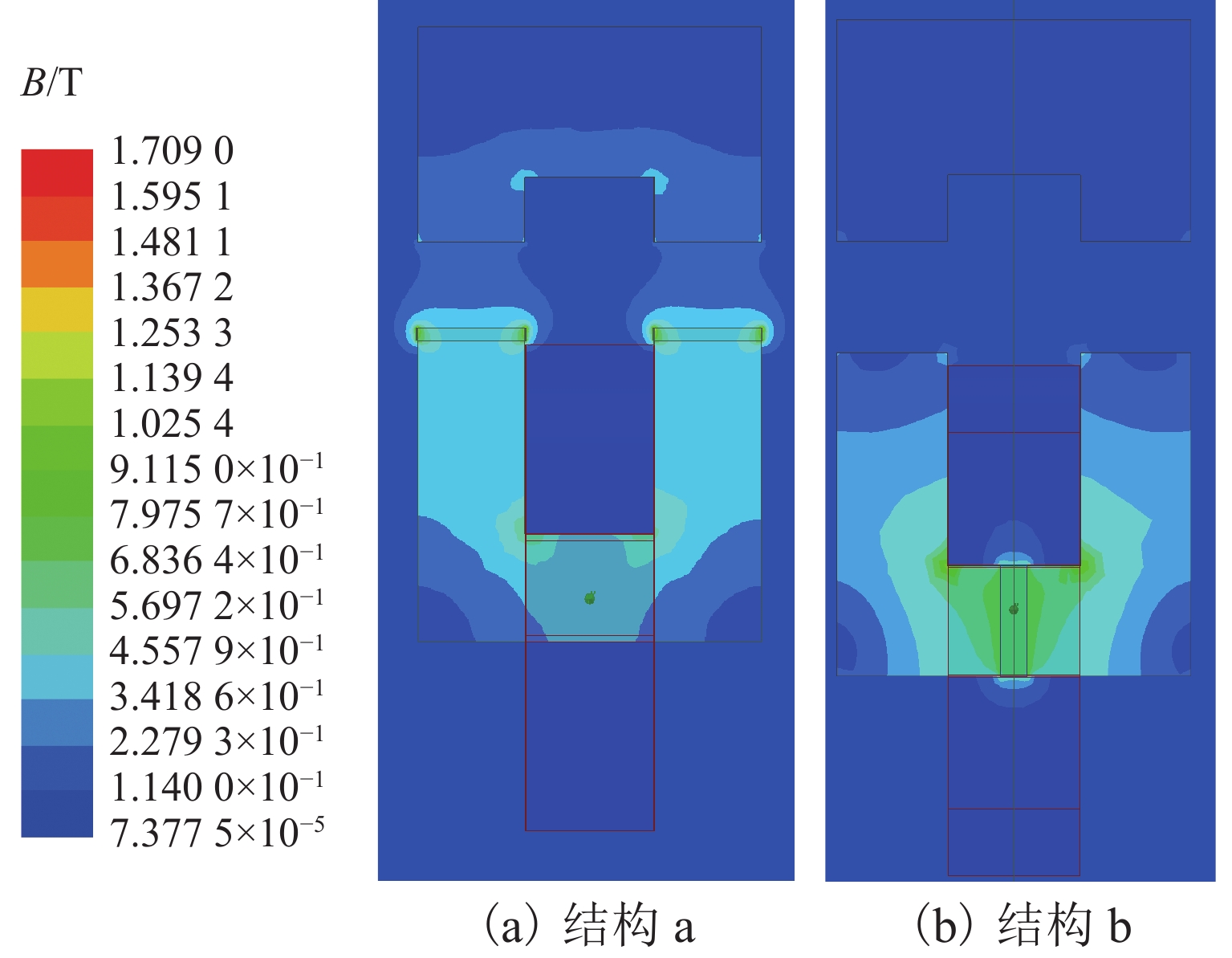
图 11 系统xOz平面磁感应强度分布
Figure 11. Magnetic induction intensity distribution of system on xOz plane
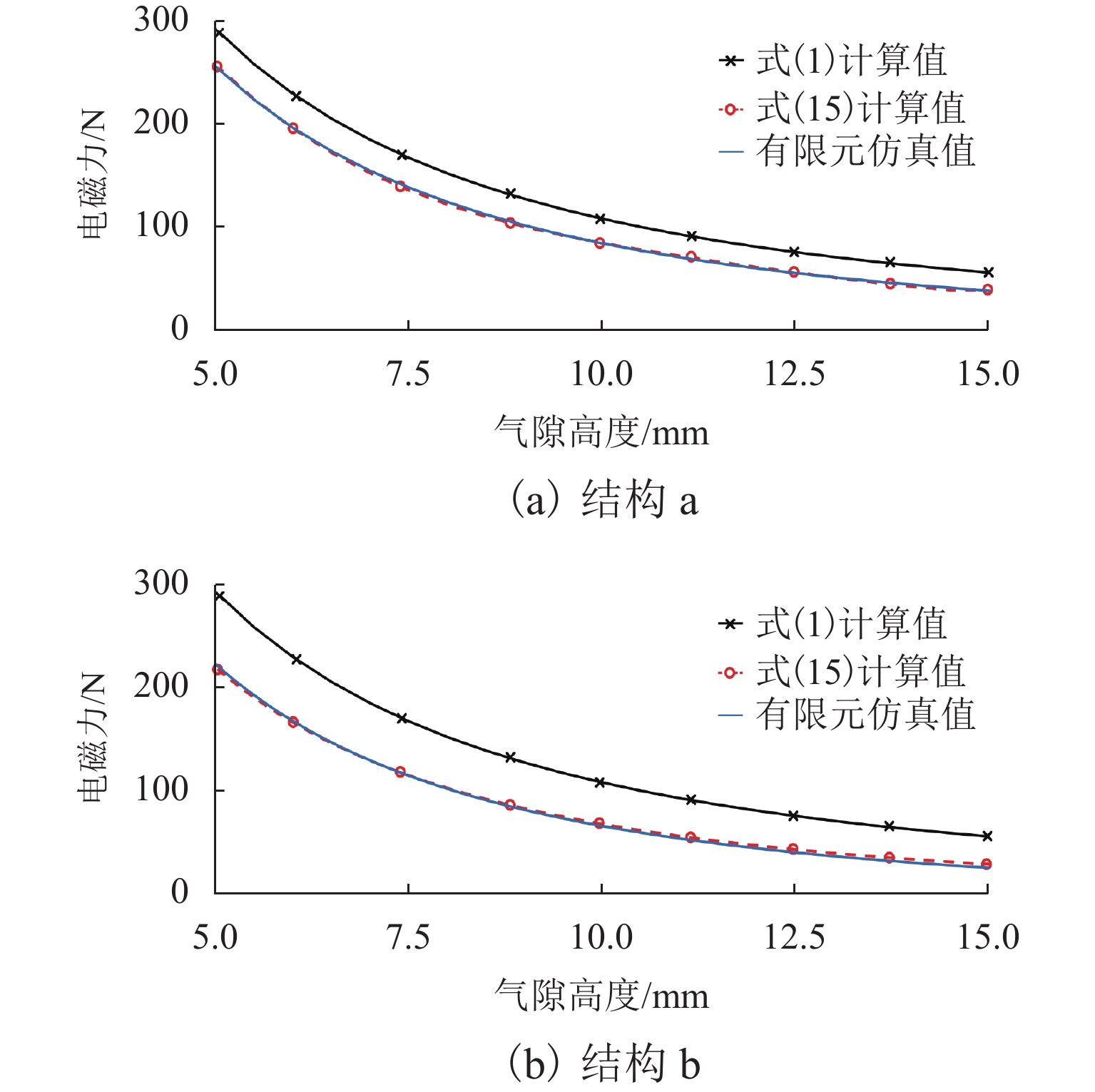
图 12 工作气隙为5~15 mm时电磁力随气隙高度的变化曲线
Figure 12. Variation curves of electromagnetic force with air gap height at working air gap of 5–15 mm
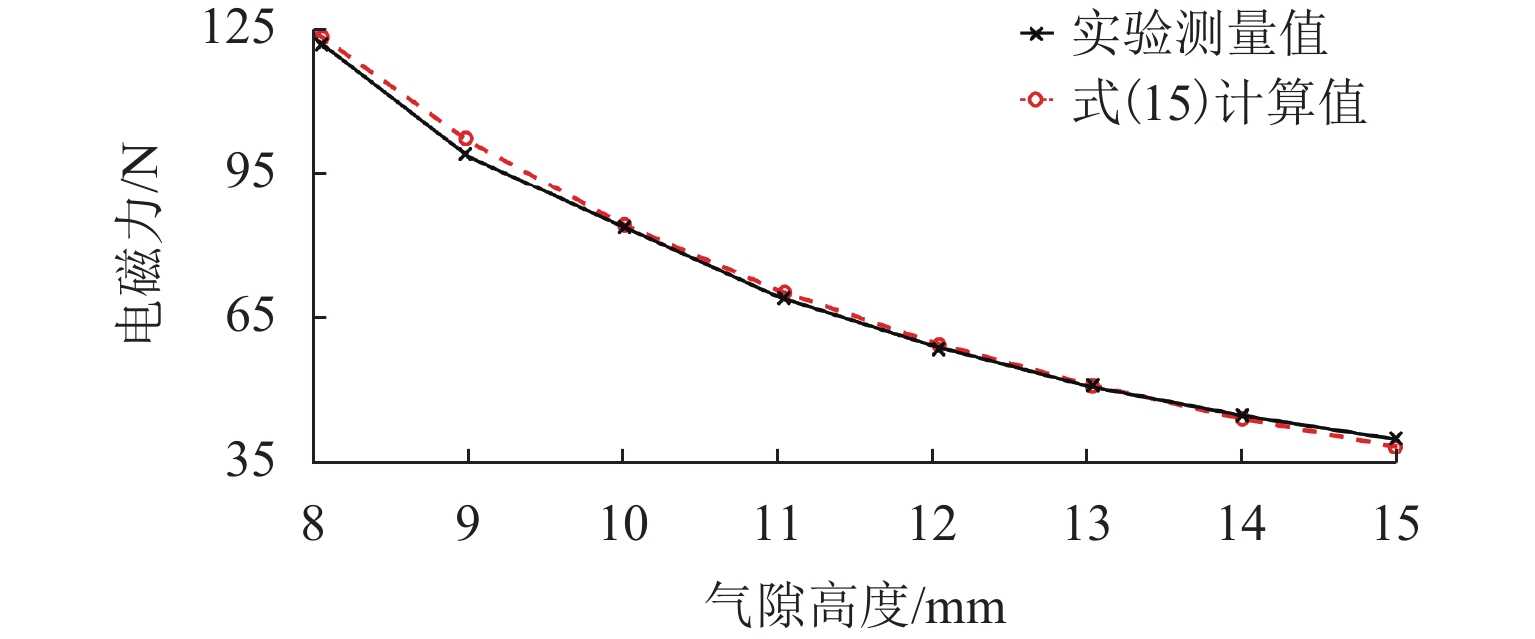
图 14 工作气隙为8~15 mm时电磁力随气隙高度的变化曲线
Figure 14. Variation curves of electromagnetic force with air gap height at working air gap of 8–15 mm
表 1 仿真参数
Table 1. Simulation parameters
参 数 数 值 hpm/mm 6 N/匝 550 Hc/(A·m−1) 5.8 × 105 额定电磁线圈电流 I/A 2 等效线圈a(b)电流/A 2.67 额定气隙/mm 10  下载: 导出CSV
下载: 导出CSV
-
[1] 马卫华,胡俊雄,李铁,等. EMS型中低速磁浮列车悬浮架技术研究综述[J]. 西南交通大学学报,2023,58(4): 720-733.MA Weihua, HU Junxiong, LI Tie, et al. Technologies research review of electro-magnetic suspension medium-low-speed maglev train levitation frame[J]. Journal of Southwest Jiaotong University, 2023, 58(4): 720-733. [2] 邓自刚,刘宗鑫,李海涛,等. 磁悬浮列车发展现状与展望[J]. 西南交通大学学报,2022,57(3): 455-474,530.DENG Zigang, LIU Zongxin, LI Haitao, et al. Development status and prospect of maglev train[J]. Journal of Southwest Jiaotong University, 2022, 57(3): 455-474,530. [3] GOU J S. Development status and global competition trends analysis of maglev transportation technology based on patent data[J]. Urban Rail Transit, 2018, 4(3): 117-129. doi: 10.1007/s40864-018-0087-3 [4] TZENG Y K, WANG T C. Optimal design of the electromagnetic levitation with permanent and electro magnets[J]. IEEE Transactions on Magnetics, 1994, 30(6): 4731-4733. doi: 10.1109/20.334204 [5] CHO H W, HAN H S, LEE J M, et al. Design considerations of EM-PM hybrid levitation and propulsion device for magnetically levitated vehicle[J]. IEEE Transactions on Magnetics, 2009, 45(10): 4632-4635. doi: 10.1109/TMAG.2009.2023998 [6] 王莉,张昆仑. 基于零功率控制策略的混合磁悬浮系统[J]. 西南交通大学学报,2005,40(5): 667-672.WANG Li, ZHANG Kunlun. Hybrid magnetic suspension system based on zero power control strategy[J]. Journal of Southwest Jiaotong University, 2005, 40(5): 667-672. [7] GAO T, YANG J, JIA L M, et al. Design of new energy-efficient permanent magnetic maglev vehicle suspension system[J]. IEEE Access, 2019, 7: 135917-135932. doi: 10.1109/ACCESS.2019.2939879 [8] 苏芷玄,杨杰,彭月,等. 单点混合磁悬浮系统的自抗扰控制仿真研究[J]. 铁道科学与工程学报,2022,19(4): 864-873.SU Zhixuan, YANG Jie, PENG Yue, et al. Simulating active disturbance-resistantcontrol of single-point hybrid magnetic suspension system[J]. Journal of Railway Science and Engineering, 2022, 19(4): 864-873. [9] 朱进权,葛琼璇,张波,等. 考虑悬浮系统影响的高速磁悬浮列车牵引控制策略[J]. 电工技术学报,2022,37(12): 3087-3096.ZHU Jinquan, GE Qiongxuan, ZHANG Bo, et al. Traction control strategy of high-speed maglev considering the influence of suspension system[J]. Transactions of China Electrotechnical Society, 2022, 37(12):3087-3096. [10] 徐绍辉,徐正国,金能强,等. 电磁永磁混合悬浮系统的建模仿真与实验[J]. 辽宁工程技术大学学报,2006,25(4): 553-555.XU Shaohui, XU Zhengguo, JIN Nengqiang, et al. Modeling simulation and experiments for the hybrid maglev system[J]. Journal of Liaoning Technical University, 2006, 25(4): 553-555. [11] 黎松奇,罗成,张昆仑. 基于漏磁补偿的混合电磁铁磁力修正研究[J]. 西南交通大学学报,2022,57(3): 604-609.LI Songqi, LUO Cheng, ZHANG Kunlun. Correction of magnetic force of hybrid electromagnet based on magnetic flux leakage compensation[J]. Journal of Southwest Jiaotong University, 2022, 57(3): 604-609. [12] 薛毓强,吴金龙. 基于分布参数磁路模型的永磁接触器吸力特性[J]. 电工技术学报,2014,29(7): 222-228.XUE Yuqiang, WU Jinlong. Study of attractive force characteristics based on magnetic distributed parameter circuit model of permanent magnet contactors[J]. Transactions of China Electrotechnical Society, 2014, 29(7): 222-228. [13] KERDTUAD P, KITTIRATSATCHA S. Tractive force estimation for hybrid PM-electromagnetic suspension system maglev train prototype[C]//2020 6th International Conference on Engineering, Applied Sciences and Technology (ICEAST). Chiang Mai:IEEE,2020:1-4. [14] 邹圣楠,刘畅,邓舒同,等. 基于混合式磁浮平台的解耦及控制分析[J]. 西南交通大学学报,2022,57(3): 540-548.ZOU Shengnan, LIU Chang, DENG Shutong, et al. Decoupling and control stability analysis based on hybrid repulsion maglev platform[J]. Journal of Southwest Jiaotong University, 2022, 57(3): 540-548. [15] DUAN J H, XIAO S, ZHANG K L, et al. Analysis and optimization of asymmetrical double-sided electrodynamic suspension devices[J]. IEEE Transactions on Magnetics, 2019, 55(6): 1-5. [16] LIU Y P, XU X Z, WANG X D, et al. Mechanism analysis and modeling research of novel hybrid excitation guiding system[C]//2016 IEEE 11th Conference on Industrial Electronics and Applications (ICIEA). Hefei: IEEE,2016: 2251-2256. [17] 潘强强,逯迈. EMS型磁浮列车悬浮静磁场电磁环境仿真研究[J]. 中国铁道科学,2023,44(2): 102-110.PAN Qiangqiang, LU Mai. Simulation study on electromagnetic environment of suspension magnetostatic field of EMS maglev train[J]. China Railway Science, 2023, 44(2): 102-110. [18] 刘泽旭,胥光申,盛晓超,等. 洛伦兹力磁悬浮织针驱动器设计与仿真[J]. 纺织学报,2021,42(11): 159-165.LIU Zexu, XU Guangshen, SHENG Xiaochao, et al. Design and simulation of Lorentz force actuated maglev knitting needle actuator[J]. Journal of Textile Research, 2021, 42(11): 159-165. [19] NI F, MU S Y, KANG J S, et al. Robust controller design for maglev suspension systems based on improved suspension force model[J]. IEEE Transactions on Transportation Electrification, 2021, 7(3): 1765-1779. doi: 10.1109/TTE.2021.3058137 [20] 张明亮,杨大伟,李明远,等. 永磁轨道参数优化和悬浮力特性研究[J]. 中国机械工程,2023,34(19): 2370-2380.ZHANG Mingliang, YANG Dawei, LI Mingyuan, et al. Levitation force characteristics and parameter optimization of permanent magnet tracks[J]. China Mechanical Engineering, 2023, 34(19): 2370-2380. [21] 汤龙飞,谌浩,柯昌辉. 接触器静态特性测量方法的研究[J]. 中国电机工程学报,2023,43(3): 1241-1251.TANG Longfei, CHEN Hao, KE Changhui. A method for measuring the static characteristics of contactors[J]. Proceedings of the CSEE, 2023, 43(3): 1241-1251. [22] 邵立雪. 大功率永磁直流接触器电磁设计及控制研究[D]. 南京:东南大学,2018. [23] FANG S H, LIN H Y, HO S L. Magnetic field analysis and dynamic characteristic prediction of AC permanent-magnet contactor[J]. IEEE Transactions on Magnetics, 2009, 45(7): 2990-2995. doi: 10.1109/TMAG.2009.2015053 -

 下载:
下载:


 点击查看大图
点击查看大图
计量
- 文章访问数: 776
- HTML全文浏览量: 453
- PDF下载量: 82
- 被引次数: 0