

Self-Interference Cancellation Technology of Integrated Sensing and Communications System for Unmanned Aerial Vehicles
-
摘要:
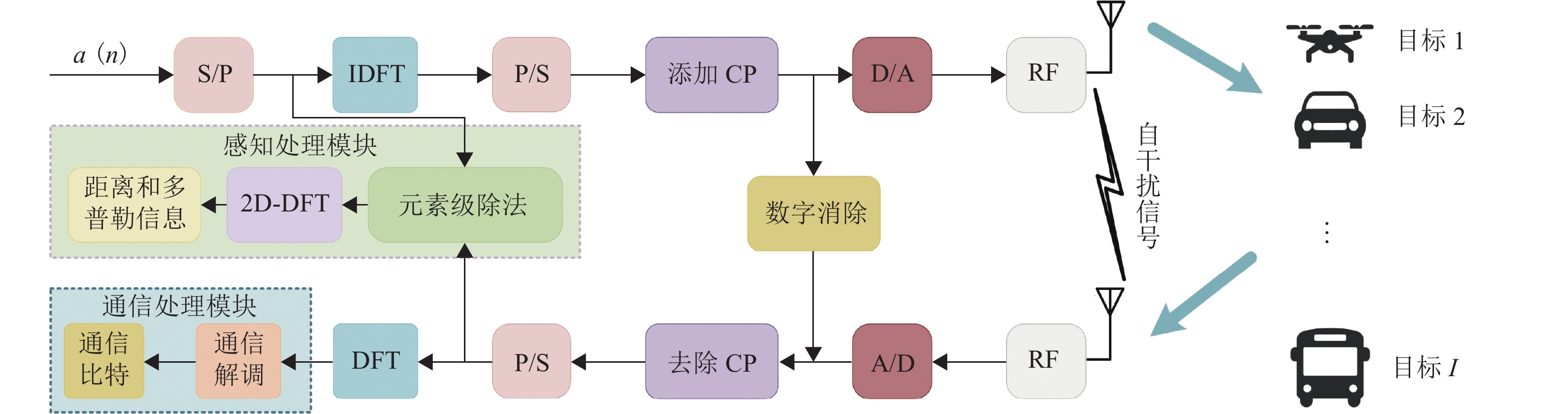
在无人机通信场景中,机载通信感知一体化系统受到本地信号发射带来的强烈自干扰影响,导致系统对目标的感知性能降低. 针对这一挑战,提出基于正交频分复用(OFDM)的通信感知一体化自干扰消除方法. 首先,建立基于OFDM的通信感知一体化系统回波模型,并引入自干扰信号;然后,利用最小二乘算法估计自干扰信号的信道增益,并利用该增益对自干扰信号进行重建和抑制;最后,通过无人机通信场景下的仿真实验验证所提方法的有效性. 结果表明,该方法能够将自干扰信号抑制到噪声功率水平,将目标回波信号的信干噪比提升近10.00 dB,从而有效提高系统的感知性能.
Abstract:In the communication scenario of unmanned aerial vehicles (UAVs), the airborne integrated sensing and communications (ISAC) system is affected by the strong self-interference caused by local signal transmission, which degrades the sensing performance of the system to the target. To solve this issue, a self-interference cancellation technology of the ISAC system based on orthogonal frequency division multiplexing (OFDM) was proposed. Firstly, the echo model of the ISAC system based on OFDM was established, and a self-interference signal was introduced. Then, the channel gain of the self-interference signal was estimated by the least squares algorithm, and the self-interference signal was reconstructed and suppressed by the gain. Finally, the effectiveness of the proposed method was verified by simulation experiments in the communication scenario of UAVs. The results show that the proposed method can suppress the self-interference signal to the noise power level and increase the signal-to-interference plus noise ratio (SINR) of the target echo signal by nearly 10.00 dB, so as to effectively improve the sensing performance of the system.
-

图 2 RT = 13.38 m,SIC处理前、后的雷达图像
Figure 2. Radar images before and after SIC processing when RT = 13.38 m

图 3 RT = 3.72 m,SIC处理前、后的雷达图像
Figure 3. Radar images before and after SIC processing when RT = 3.72 m
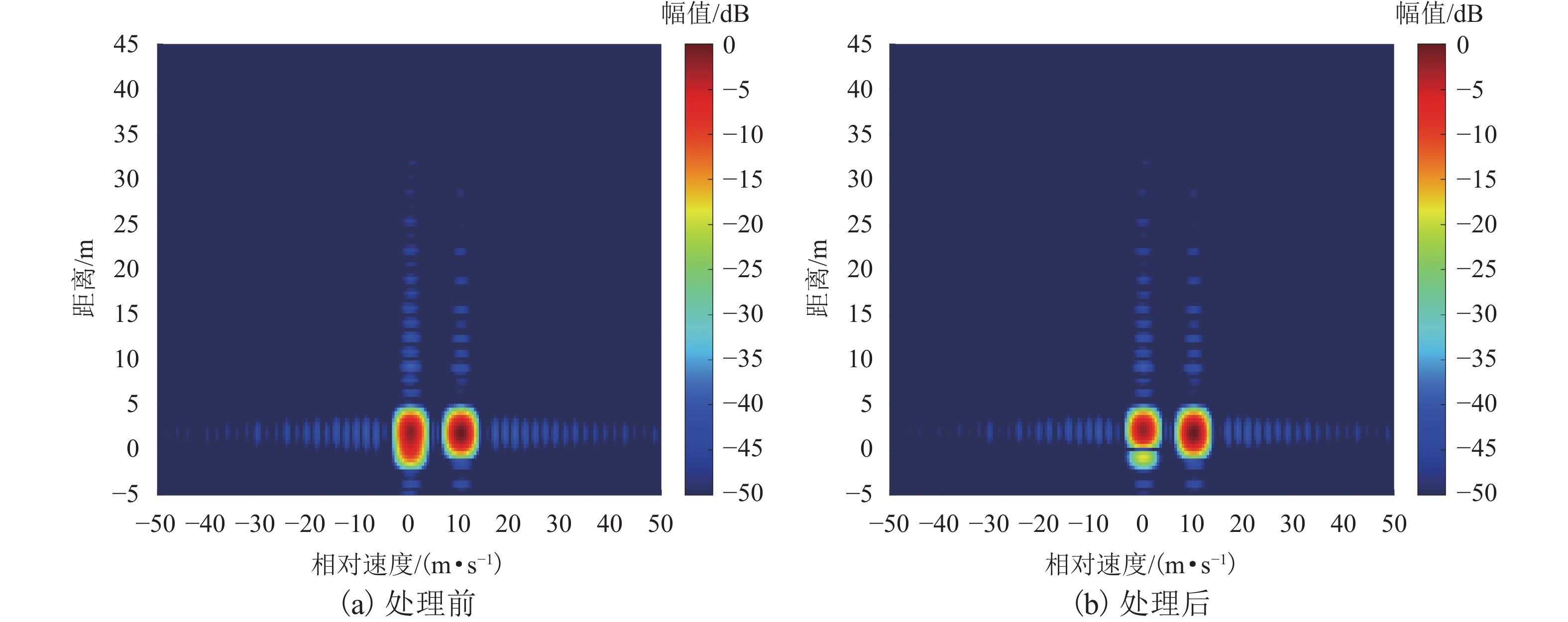
图 4 RT = 1.63 m,SIC处理前、后的雷达图像
Figure 4. Radar images before and after SIC processing when RT = 1.63 m
表 1 OFDM-based ISAC系统参数
Table 1. Parameters of OFDM-based ISAC system
变量 数值 ${f_{\text{c}}}$/GHz 24 M/个 256 N/个 1024 $\Delta f$/kHz 90.909 $T$/μs $11$ ${T_{{\text{CP}}}}$/μs $1.375$ $T_{\mathrm{O} }$/μs $12.375$ $B$/MHz 93.1 ${R_{\max }}$/m 206 $\Delta R$/m 1.61 ${v_{\max }}$/(m·s−1) ±252.3 $\Delta v$/(m·s−1) 1.97  下载: 导出CSV
下载: 导出CSV
表 2 SIC处理前后SINR
Table 2. SINRs before and after SIC processing
dB RT/m 目标 1 目标 2 SIC 前 SIC 后 SIC 前 SIC 后 13.38 −32.93 −23.73 −32.93 −23.73 3.72 −7.03 2.18 −7.03 2.18 1.63 2.51 6.84 2.51 6.84
下载: 导出CSV
-
[1] HUANG Y X, HU S, MA S Y, et al. Designing low-PAPR waveform for OFDM-based RadCom systems[J]. IEEE Transactions on Wireless Communications, 2022, 21(9): 6979-6993. doi: 10.1109/TWC.2022.3153606 [2] 叶启彬,胡泽林,黄驿轩,等. 5G NR通信雷达一体化系统雷达性能分析[J]. 电子科技大学学报,2022,51(6): 847-855. doi: 10.12178/1001-0548.2022299YE Qibin, HU Zelin, HUANG Yixuan, et al. Radar performance analysis of 5G NR RadCom system[J]. Journal of University of Electronic Science and Technology of China, 2022, 51(6): 847-855. doi: 10.12178/1001-0548.2022299 [3] 胡泽林,叶启彬,黄驿轩,等. 基于频分多址的多用户OFDM通信雷达一体化方案[J]. 电子科技大学学报,2023,52(2): 196-202. doi: 10.12178/1001-0548.2022359HU Zelin, YE Qibin, HUANG Yixuan, et al. Multiuser OFDM RadCom scheme based on FDMA[J]. Journal of University of Electronic Science and Technology of China, 2023, 52(2): 196-202. doi: 10.12178/1001-0548.2022359 [4] LIU F, CUI Y H, MASOUROS C, et al. Integrated sensing and communications: toward dual-functional wireless networks for 6G and beyond[J]. IEEE Journal on Selected Areas in Communications, 2022, 40(6): 1728-1767. doi: 10.1109/JSAC.2022.3156632 [5] BEKKERMAN I, TABRIKIAN J. Target detection and localization using MIMO radars and sonars[J]. IEEE Transactions on Signal Processing, 2006, 54(10): 3873-3883. doi: 10.1109/TSP.2006.879267 [6] WANG X L, SONG T H, WU Y X. Covering a mobile target using mobile sensor networks[C]//2016 Chinese Control and Decision Conference (CCDC). Yinchuan: IEEE, 2016: 1433-1437. [7] HU S Y, YUAN X, NI W, et al. Trajectory planning of cellular-connected UAV for communication-assisted radar sensing[J]. IEEE Transactions on Communications, 2022, 70(9): 6385-6396. doi: 10.1109/TCOMM.2022.3195868 [8] MENG K T, WU Q Q, MA S D, et al. UAV trajectory and beamforming optimization for integrated periodic sensing and communication[J]. IEEE Wireless Communications Letters, 2022, 11(6): 1211-1215. doi: 10.1109/LWC.2022.3161338 [9] JIANG W W, SHEN C, AI B. UAV-assisted sensing and communication design for average peak age-of-information minimization[C]//2022 IEEE International Conference on Communications Workshops (ICC Workshops). Seoul: IEEE, 2022: 1005-1010. [10] LYU Z H, ZHU G X, XU J. Joint maneuver and beamforming design for UAV-enabled integrated sensing and communication[J]. IEEE Transactions on Wireless Communications, 2022, 22(4): 2424-2440. [11] 张燕霞,刘向南,孙春蕾,等. 基于通感一体化的6G无人机网络[J]. 移动通信,2023,47(9): 71-76.ZHANG Yanxia, LIU Xiangnan, SUN Chunlei, et al. Integrated sensing and communication-based 6G UAV networks[J]. Mobile Communications, 2023, 47(9): 71-76. [12] 周杲,范平志,郝莉. 基于OFDM的DFT加扰矢量码分多址接入技术[J]. 西南交通大学学报,2017,52(1): 148-155. doi: 10.3969/j.issn.0258-2724.2017.01.021ZHOU Gao, FAN Pingzhi, HAO Li. OFDM based DFT scrambling vector code division multiple access[J]. Journal of Southwest Jiaotong University, 2017, 52(1): 148-155. doi: 10.3969/j.issn.0258-2724.2017.01.021 [13] HWANG T, YANG C Y, WU G, et al. OFDM and its wireless applications: a survey[J]. IEEE Transactions on Vehicular Technology, 2009, 58(4): 1673-1694. doi: 10.1109/TVT.2008.2004555 [14] LEVANON N. Multifrequency complementary phase-coded radar signal[J]. IEE Proceedings–Radar, Sonar and Navigation, 2000, 147(6): 276-284. doi: 10.1049/ip-rsn:20000734 [15] STURM C, WIESBECK W. Waveform design and signal processing aspects for fusion of wireless communications and radar sensing[J]. Proceedings of the IEEE, 2011, 99(7): 1236-1259. doi: 10.1109/JPROC.2011.2131110 [16] STURM C, ZWICK T, WIESBECK W. An OFDM system concept for joint radar and communications operations[C]//VTC Spring 2009—IEEE 69th Vehicular Technology Conference. Barcelona: IEEE, 2009: 1-5. [17] LIU Y J, LIAO G S, YANG Z W, et al. Design of integrated radar and communication system based on MIMO-OFDM waveform[J]. Journal of Systems Engineering and Electronics, 2017, 28(4): 669-680. doi: 10.21629/JSEE.2017.04.06 [18] 仲福建,赵永驰. 全双工中继选择策略的性能研究[J]. 西南交通大学学报,2015,50(5): 912-916. doi: 10.3969/j.issn.0258-2724.2015.05.022ZHONG Fujian, ZHAO Yongchi. Performance research on full-duplex relay selection scheme[J]. Journal of Southwest Jiaotong University, 2015, 50(5): 912-916. doi: 10.3969/j.issn.0258-2724.2015.05.022 [19] KORPI D, RIIHONEN T, SYRJÄLÄ V, et al. Full-duplex transceiver system calculations: analysis of ADC and linearity challenges[J]. IEEE Transactions on Wireless Communications, 2014, 13(7): 3821-3836. doi: 10.1109/TWC.2014.2315213 [20] NGO H Q, SURAWEERA H A, MATTHAIOU M, et al. Multipair full-duplex relaying with massive arrays and linear processing[J]. IEEE Journal on Selected Areas in Communications, 2014, 32(9): 1721-1737. doi: 10.1109/JSAC.2014.2330091 [21] KIM D, JU H, PARK S, et al. Effects of channel estimation error on full-duplex two-way networks[J]. IEEE Transactions on Vehicular Technology, 2013, 62(9): 4666-4672. doi: 10.1109/TVT.2013.2265407 [22] AHMED E, ELTAWIL A M, SABHARWAL A. Rate gain region and design tradeoffs for full-duplex wireless communications[J]. IEEE Transactions on Wireless Communications, 2013, 12(7): 3556-3565. doi: 10.1109/TWC.2013.060413.121871 [23] KOLODZIEJ K E, PERRY B T, HERD J S. In-band full-duplex technology: techniques and systems survey[J]. IEEE Transactions on Microwave Theory and Techniques, 2019, 67(7): 3025-3041. doi: 10.1109/TMTT.2019.2896561 [24] ZHANG Z S, LONG K P, VASILAKOS A V, et al. Full-duplex wireless communications: challenges, Joint maneuver and beamforming design for UAV-enabled integrated sensing and communication solutions, and future research directions[J]. Proceedings of the IEEE, 2016, 104(7): 1369-1409. doi: 10.1109/JPROC.2015.2497203 [25] 管鹏鑫,汪奕汝,赵玉萍. 基于正则化的全双工通信系统非线性自干扰消除方法[J]. 北京大学学报(自然科学版),2021,57(6): 991-996.GUAN Pengxin, WANG Yiru, ZHAO Yuping. A regularization based nonlinear self-interference suppression method for full duplex communication systems[J]. Acta Scientiarum Naturalium Universitatis Pekinensis, 2021, 57(6): 991-996. [26] BERGER C R, DEMISSIE B, HECKENBACH J, et al. Signal processing for passive radar using OFDM waveforms[J]. IEEE Journal of Selected Topics in Signal Processing, 2010, 4(1): 226-238. doi: 10.1109/JSTSP.2009.2038977 -

 下载:
下载:

 点击查看大图
点击查看大图
计量
- 文章访问数: 1316
- HTML全文浏览量: 459
- PDF下载量: 188
- 被引次数: 0