

Collaborative Target Azimuth Perception Algorithm of Unmanned Aerial Vehicles Based on Spatial Spectrum Estimation
-
摘要:
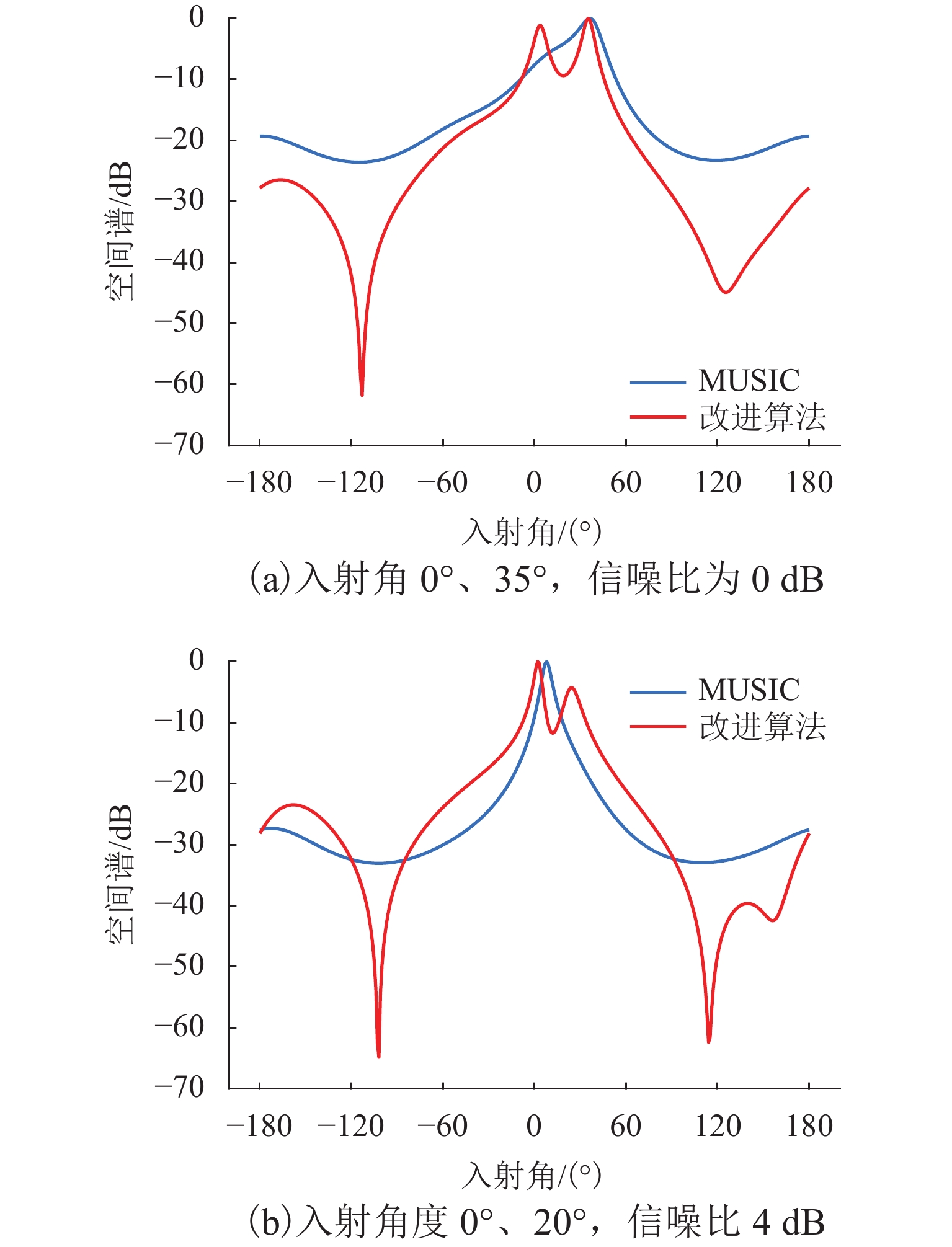
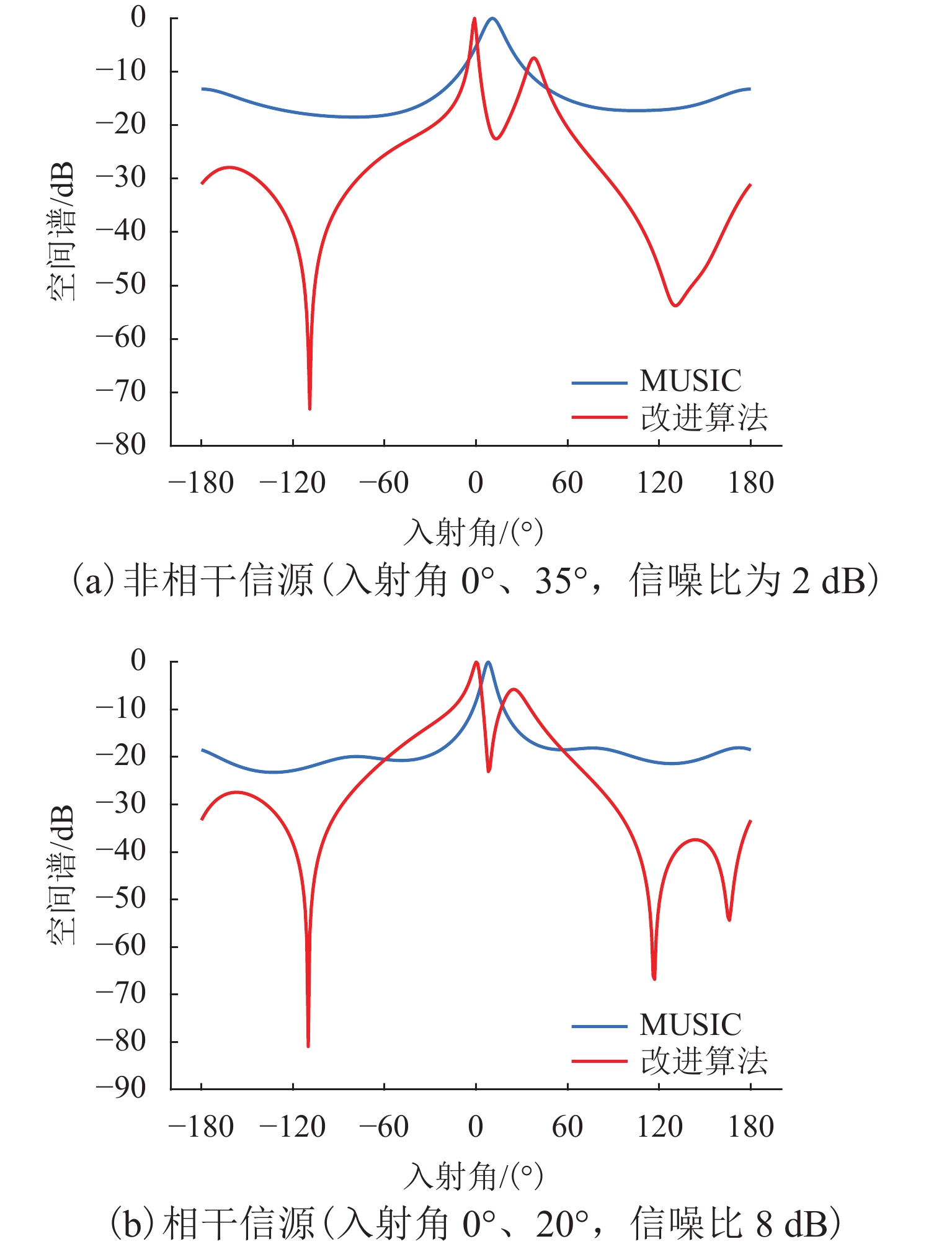
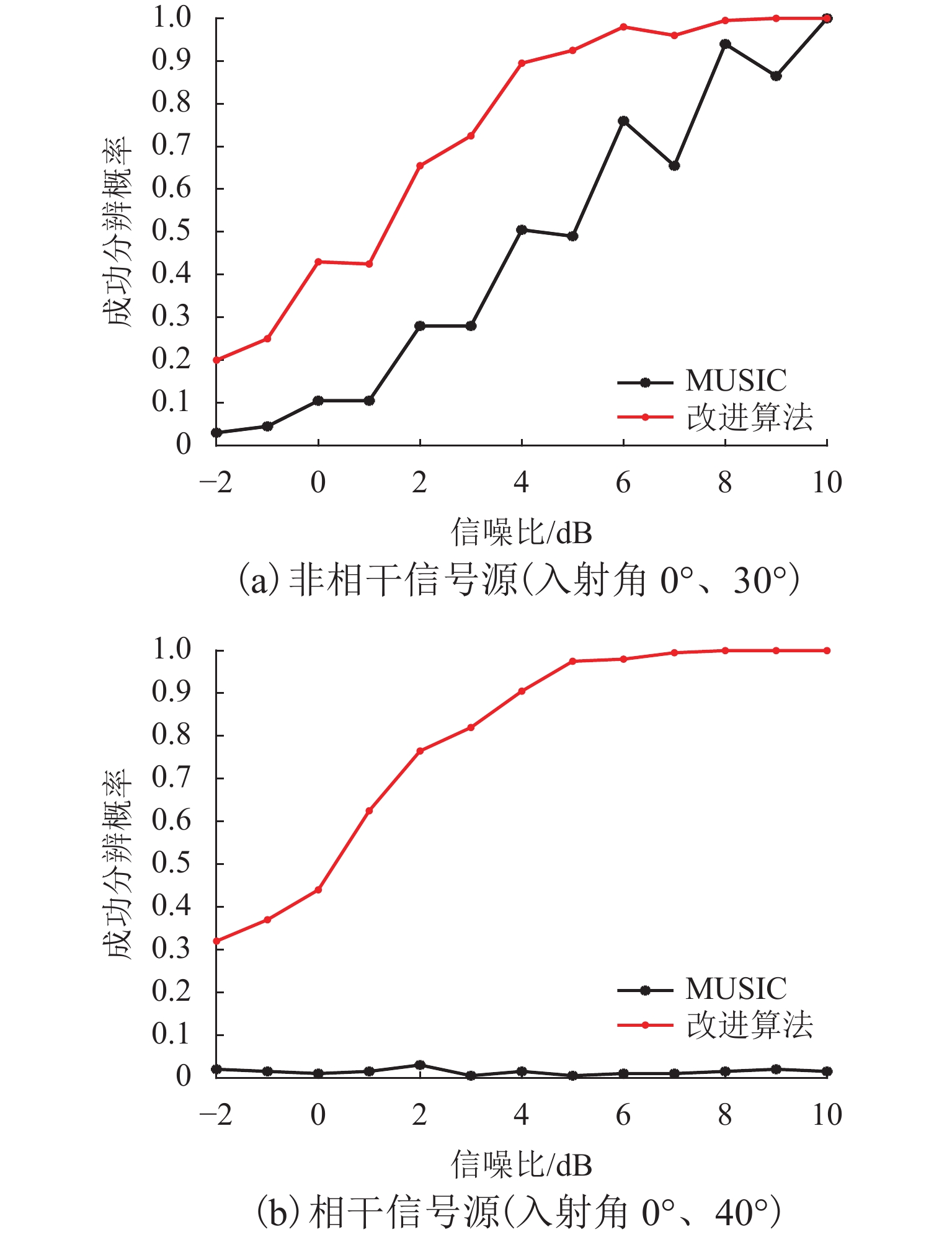
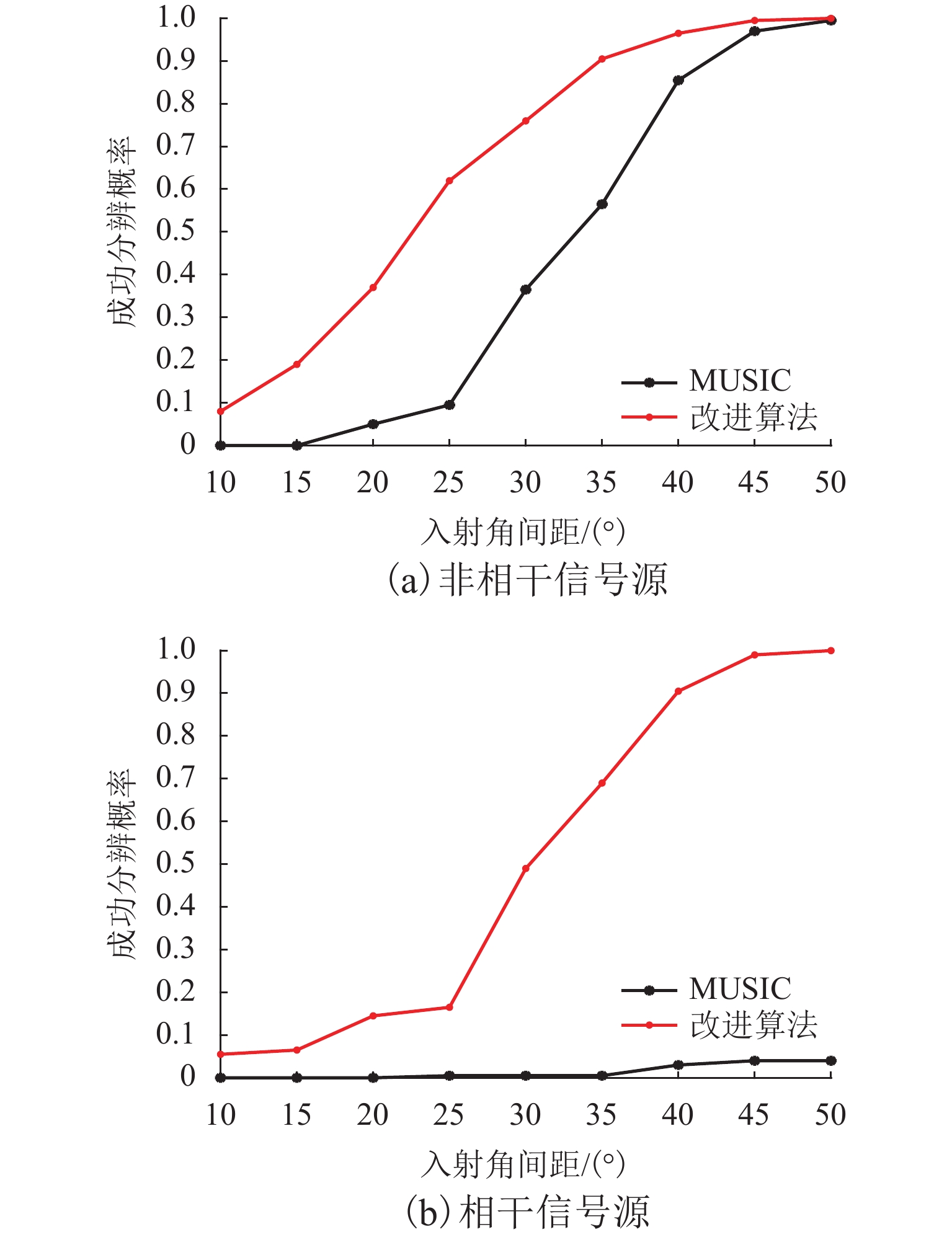
无人机协同目标感知技术是有人机无人机混合运行的重要安全保障. 针对复杂空域环境下的感知可靠性问题,分析大中型无人机的复杂融合空域运行场景,并确定无人机协同目标感知的精准性、高实时性、抗干扰性和低载荷性等需求,提出一种四单元阵列天线和数字化射频体制的无人机协同目标感知系统架构;同时,结合空管雷达信号特性和天线体制,设计方位感知算法,通过修正协方差矩阵、信号子空间加权和噪声子空间加权等方法,设计基于多信号分类(multiple signal classification,MUSIC)的空间谱估计算法,并提出基于子空间分解的幅相误差在线估计算法;最后,开展算法仿真试验和实际空域环境飞行试验. 研究结果表明:相比传统MUSIC算法,优化算法的方位感知高分辨性能提升23.3%,并改善了无人机协同目标方位感知的高实时性、抗干扰性和低载荷性.
Abstract:Collaborative target perception technology of unmanned aerial vehicles (UAVs) is an important security guarantee for the mixed operation of manned aerial vehicles and UAVs. In view of the perception reliability problem in complex airspace environments, the operation scenarios of large and medium-sized UAVs in complex mixed airspace were analyzed, and the needs of collaborative target perception of UAVs, such as precision, high real-time performance, anti-interference, and low load were determined. A collaborative target perception system architecture of UAVs combining a four-unit array antenna and digital radio frequency was proposed. At the same time, the signal characteristics and antenna system of air traffic control (ATC) radar were utilized to design an azimuth perception algorithm. By modifying the covariance matrix and weighting signal subspace and noise subspace, a spatial spectrum estimation algorithm based on multiple signal classification (MUSIC) was designed. In addition, an online amplitude-phase error estimation algorithm based on subspace decomposition was designed. Finally, the algorithm simulation test and flight test in a real airspace environment were carried out. The research results show that compared with the traditional MUSIC algorithm, the improved algorithm improves the high resolution performance of azimuth perception by 23.3% and enhances the high real-time performance, anti-interference, and low load of the collaborative target azimuth perception of UAVs.
-
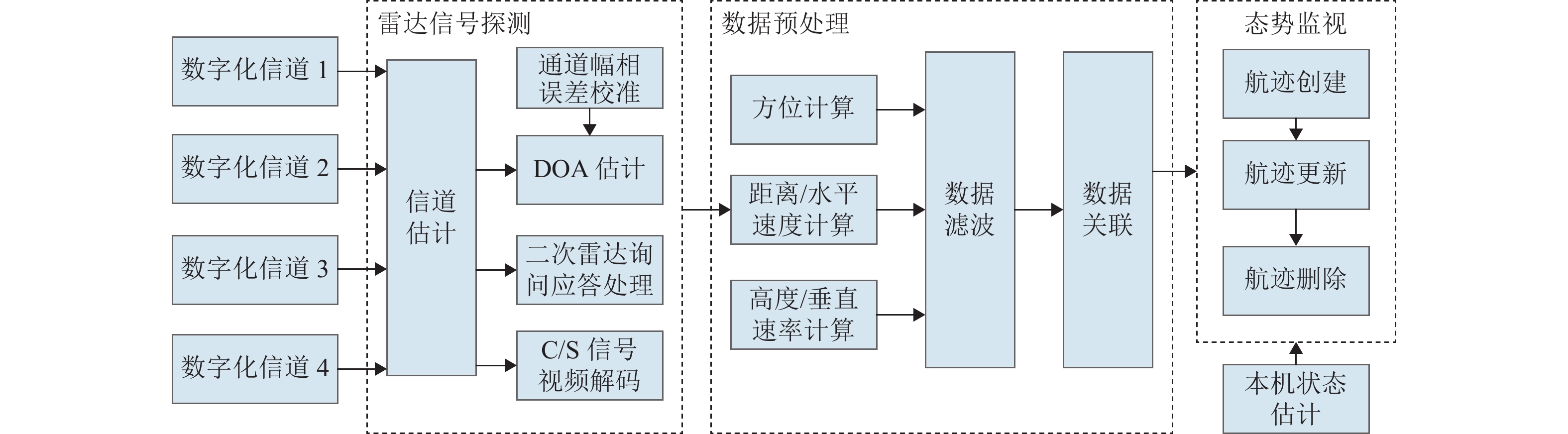
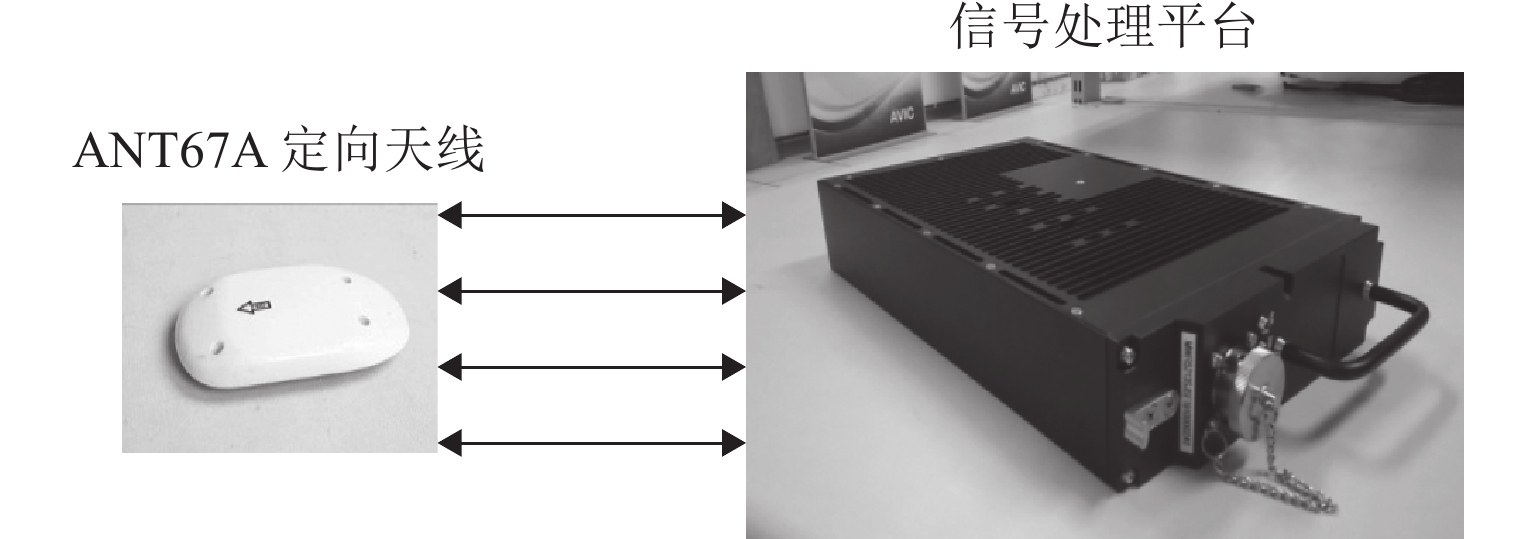
图 2 无人机协同目标感知系统架构
Figure 2. Collaborative target perception system architecture of UAVs
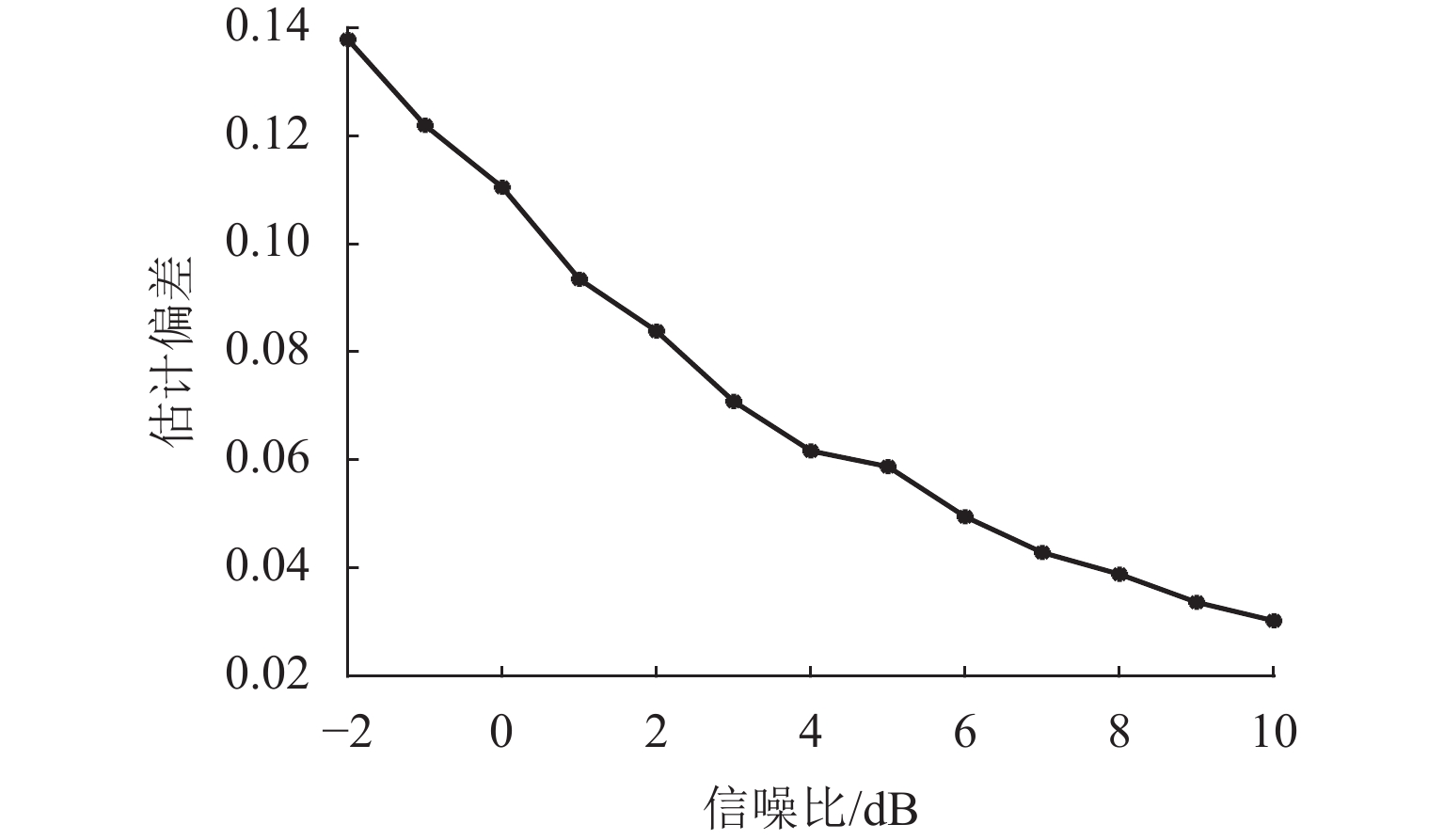
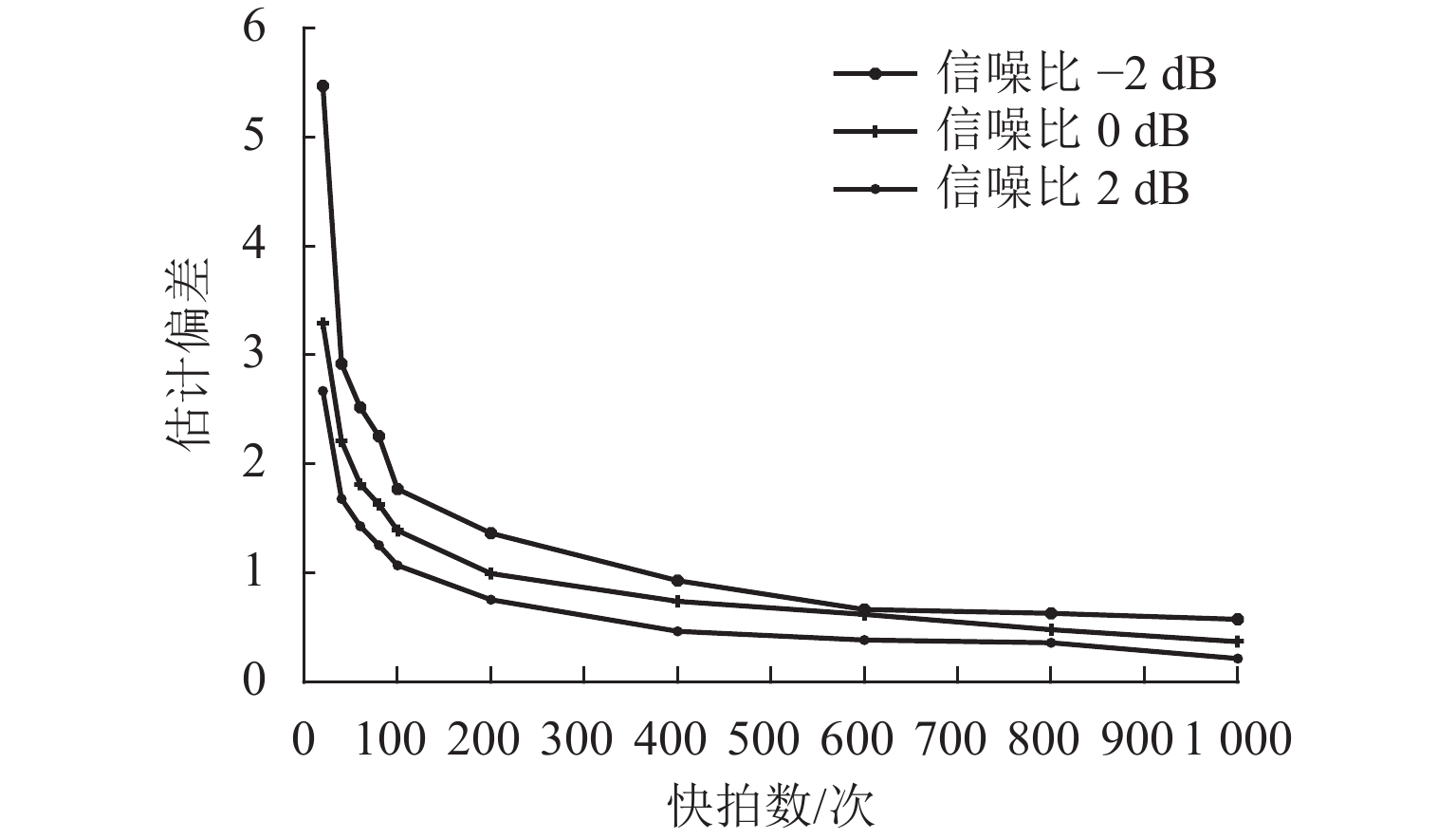
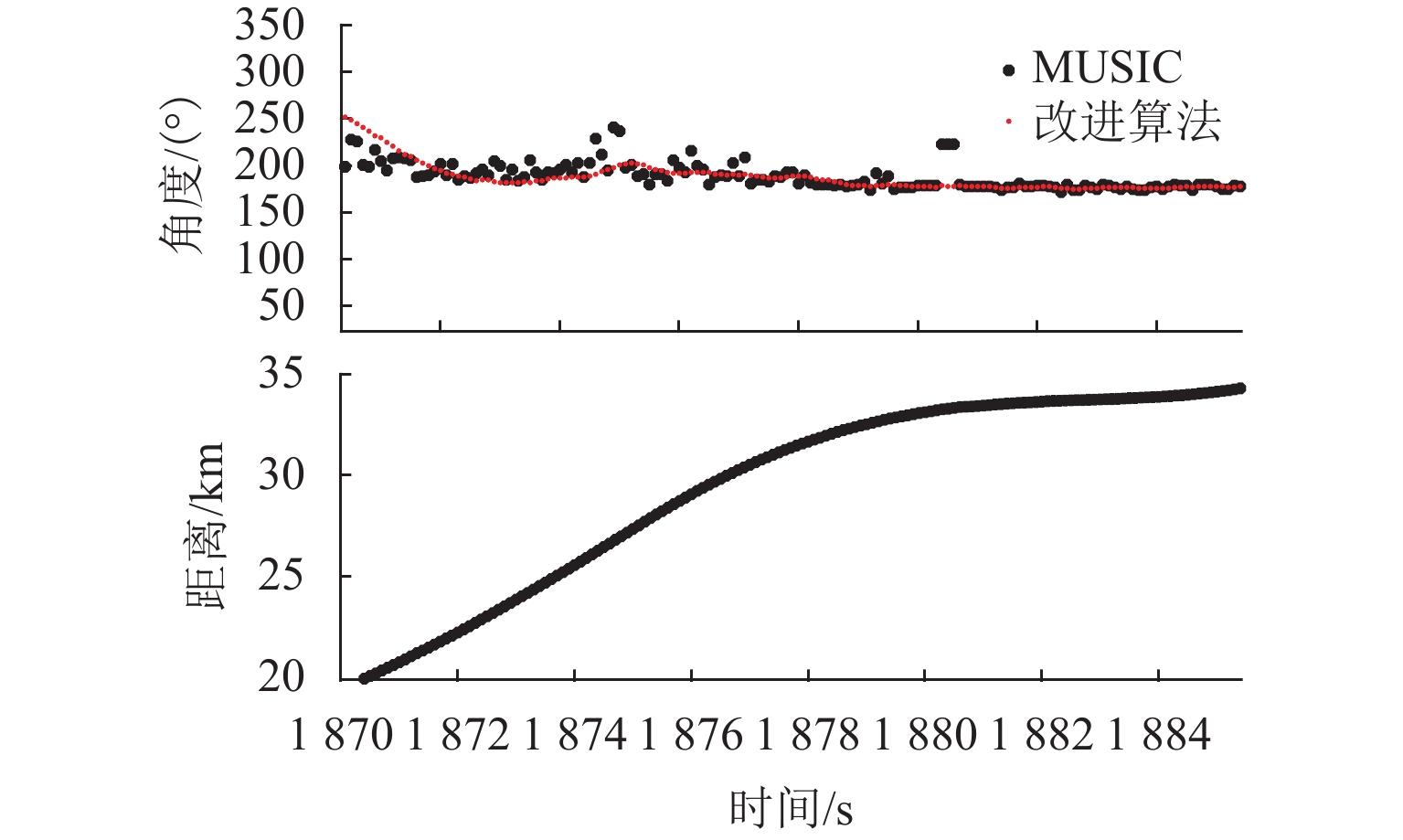
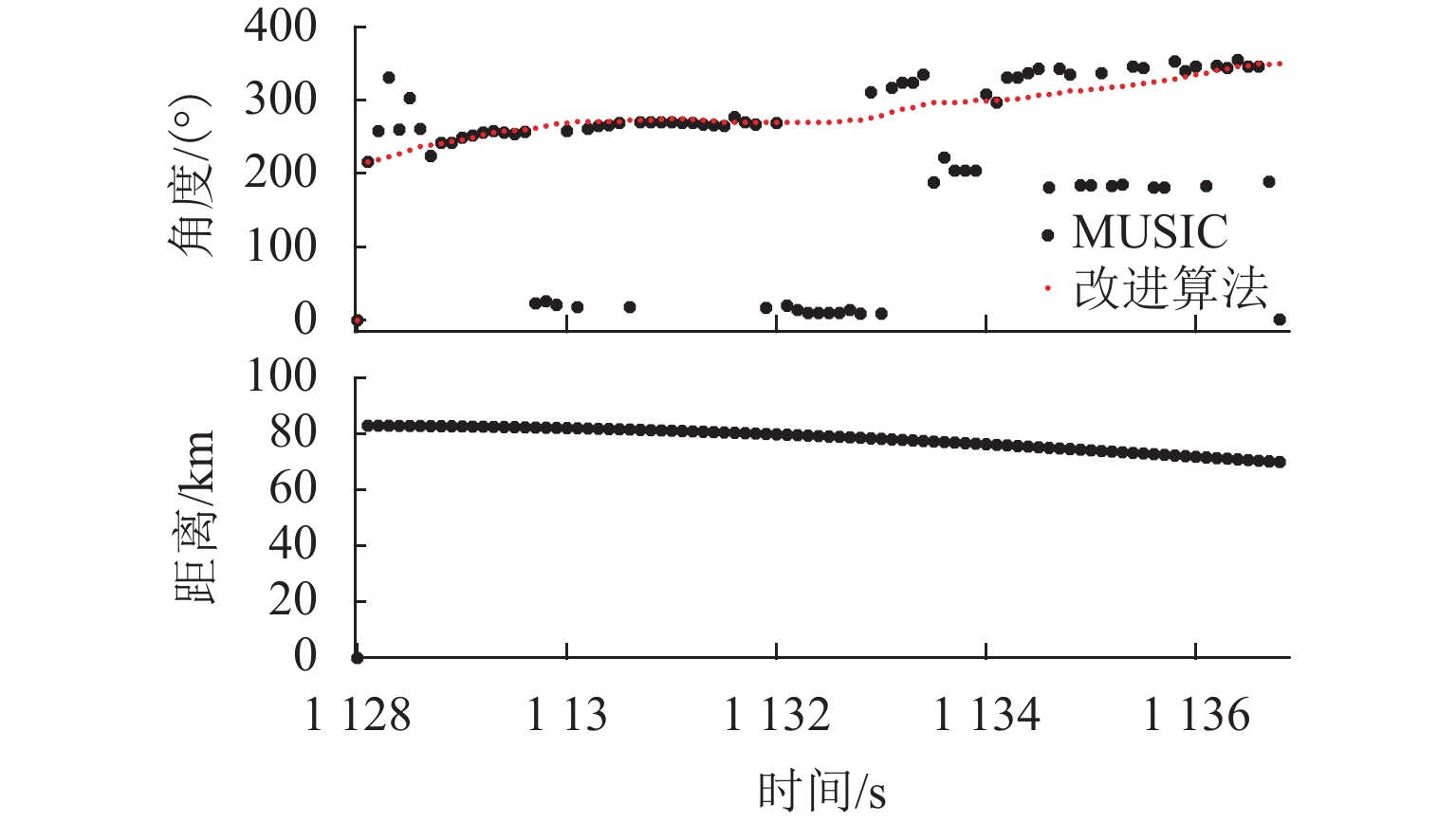
图 10 不同信噪比条件下的算法估计偏差
Figure 10. Estimation deviation under different signal-to-noise ratios
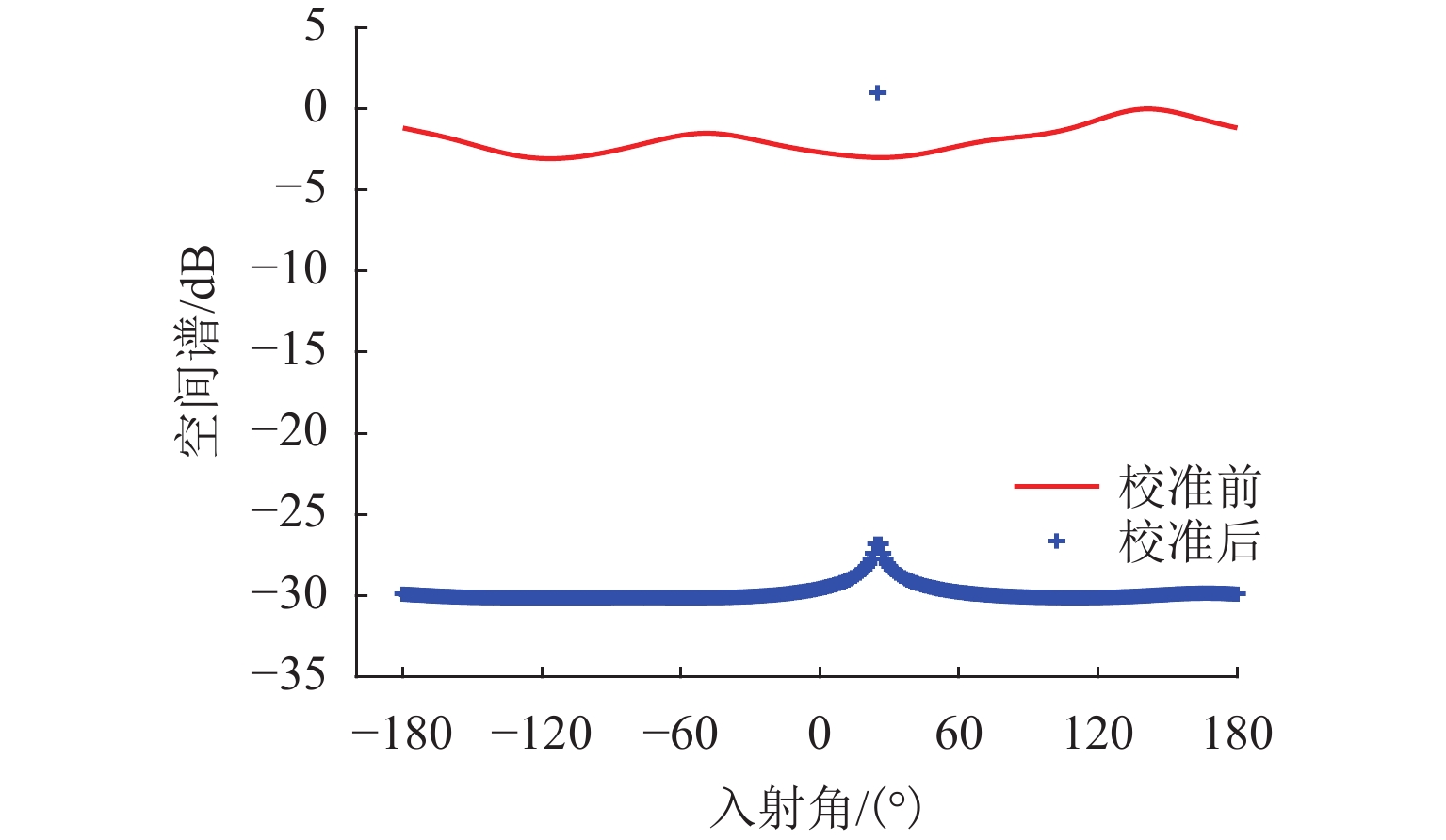
表 1 幅相误差
Table 1. Amplitude-phase error
通道 设计值 估计值 1 1.0000 1.0000 2 0.2249 + 1.178 7i 0.1727 + 1.103 9i 3 −0.8229 − 1.132 6i −0.7198 − 1.012 8i 4 −1.5874 + 0.200 5i −1.3692 + 0.158 8i  下载: 导出CSV
下载: 导出CSV
-
[1] 李德仁,李明. 无人机遥感系统的研究进展与应用前景[J]. 武汉大学学报(信息科学版),2014,39(5): 505-513,540.LI Deren, LI Ming. Research advance and application prospect of unmanned aerial vehicle remote sensing system[J]. Geomatics and Information Science of Wuhan University, 2014, 39(5): 505-513,540. [2] 吕洋,康童娜,潘泉,等. 无人机感知与规避:概念、技术与系统[J]. 中国科学:信息科学,2019,49(5): 520-537. doi: 10.1360/N112018-00318LYU Yang, KANG Tongna, PAN Quan, et al. UAV sense and avoidance:concepts, technologies, and systems[J]. Scientia Sinica (Informationis), 2019, 49(5): 520-537. doi: 10.1360/N112018-00318 [3] 毕红哲,张洲宇,申功璋,等. 无人机感知与规避技术研究进展[J]. 电子测量与仪器学报,2016,30(5): 661-668.BI Hongzhe, ZHANG Zhouyu, SHEN Gongzhang, et al. Recent progress in UAV sense and avoid system[J]. Journal of Electronic Measurement and Instrumentation, 2016, 30(5): 661-668. [4] SAHAWNEH L R, DUFFIELD M O, BEARD R W, et al. Detect and avoid for small unmanned aircraft systems using ADS-B[J]. Air Traffic Control Quarterly, 2015, 23(2/3): 203-240. [5] LYU Y, PAN Q, ZHAO C H, et al. Autonomous stereo vision based collision avoid system for small UAV[C]//AIAA Information Systems−AIAA Infotech @ Aerospace. Virginia:AIAA,2017:1150.1-1150.12. [6] ACCARDO D, FASANO G, FORLENZA L, et al. Flight test of a radar-based tracking system for UAS sense and avoid[J]. IEEE Transactions on Aerospace and Electronic Systems, 2013, 49(2): 1139-1160. doi: 10.1109/TAES.2013.6494404 [7] 何桂萍,徐亚军. ADS-B数据链的比较及特性研究[J]. 中国民航飞行学院学报,2010,21(4): 3-6. doi: 10.3969/j.issn.1009-4288.2010.04.001 [8] RTCA Inc. Minimum operational performance standards for 1090 MHz extended squitter automatic dependent surveillance—broadcast (ADS-B) and traffic information services—broadcast (TIS-B): RTCA DO-260[S]. Washington D. C.: RTCA,2020. [9] PETROCHILOS N, PIRACCI E G, GALATI G. Separation of multiple secondary surveillance radar sources in a real environment for the near-far case[C]//2007 IEEE Antennas and Propagation Society International Symposium. Honolulu: IEEE,2007: 3988-3991. [10] PETROCHILOS N, GALATI G, PIRACCI E. Separation of SSR signals by array processing in multilateration systems[J]. IEEE Transactions on Aerospace and Electronic Systems, 2009, 45(3): 965-982. doi: 10.1109/TAES.2009.5259177 [11] 李丞,张玉,唐波. 基于曼彻斯特编码算法的单通道二次雷达信号重构方法[J]. 探测与控制学报,2018,40(3): 66-69.LI Cheng, ZHANG Yu, TANG Bo. Secondary surveillance radar replies received in single channel based on Manchester decoding algorithm[J]. Journal of Detection & Control, 2018, 40(3): 66-69. [12] 张军. 空域监视技术的新进展及应用[J]. 航空学报,2011,32(1): 1-14.ZHANG Jun. New development and application of airspace surveillance technology[J]. Acta Aeronautica et Astronautica Sinica, 2011, 32(1): 1-14. [13] 吴振亚,王明辉,张瑞平,等. 一种基于ADS-B的雷达误差实时融合校正算法[J]. 西南交通大学学报,2013,48(1): 102-106,115. doi: 10.3969/j.issn.0258-2724.2013.01.016WU Zhenya, WANG Minghui, ZHANG Ruiping, et al. ADS-B-based algorithm for real-time optimal estimation of radar biases[J]. Journal of Southwest Jiaotong University, 2013, 48(1): 102-106,115. doi: 10.3969/j.issn.0258-2724.2013.01.016 [14] MILLER P C. General atomics successfully tests UAS sense-and-avoid system[EB/OL]. (2014-12-04)[2023-06-27]. https://uasmagazine.com/articles/889/. [15] 蓝晓宇. 提高空间谱估计分辨率的超分辨测向算法研究[D]. 哈尔滨: 哈尔滨工程大学,2012. [16] 田蕴琦. 强干扰下相干多目标的DOA估计算法研究[D]. 哈尔滨: 哈尔滨工程大学,2019. [17] RTCA. Minimum operational performance standards for traffic alert and collinsion avoidance system Ⅱ (TCAS Ⅱ): RTCA-DO-185[S]. Washington D. C.:RTCA, 2008. [18] RTCA Inc. Minimum operational performance standards for detect and avoid (DAA): RTCA-DO-365C[S]. Washington D. C.: RTCA, 2021. [19] 倪壮. 民机机载防撞系统算法研究与仿真[D]. 上海:上海交通大学,2015. [20] 田航. MUSIC算法性能研究综述[J]. 科技资讯,2019,17(27): 5-6. [21] 王永良,陈辉,彭应宁,等. 空间谱估计理论与算法[M]. 北京: 清华大学出版社,2004: 18-52. [22] WEISS A J, FRIEDLANDER B. Eigenstructure methods for direction finding with sensor gain and phase uncertainties[J]. Circuits, Systems and Signal Processing, 1990, 9(3): 271-300. doi: 10.1007/BF01201215 [23] JIAO Y M, HUANG J G, HOU Y S. Multidimensional MUSIC DOA estimation using ant colony optimization algorithm[C]//IEEE 10th International Conference on Signal Processing Proceedings. Beijing:IEEE,2010:291-294. [24] 陈德莉. 波达方向估计中阵列误差校正技术研究[D]. 长沙: 国防科学技术大学,2008. [25] 周治宇,陈豪. 一种基于一维噪声子空间的幅相误差自校正方法[J]. 电子测量与仪器学报,2009,23(2): 58-62.ZHOU Zhiyu, CHEN Hao. A self-calibration method for gain and phase uncertainties based on one-dimension noise sub-space algorithm[J]. Journal of Electronic Measurement and Instrument, 2009, 23(2): 58-62. -

 下载:
下载:

 点击查看大图
点击查看大图
计量
- 文章访问数: 590
- HTML全文浏览量: 385
- PDF下载量: 137
- 被引次数: 0