

Weighted Fusion-Based Unscented Kalman Filter Positioning Algorithm for Normal-Conducting High-Speed Maglev Trains
-
摘要:
为提高高速磁浮列车测速定位的精确性,本文针对基于长定子齿槽检测的常导高速磁浮列车测速定位方法在列车运行过程中可能因测速定位信号缺失、干扰、测速定位安装误差等原因引起的定位不准问题,提出一种基于加权融合无迹卡尔曼滤波(UKF)的常导高速磁浮列车测速定位算法. 介绍了高速磁浮列车基于长定子齿槽的测速定位方法,并对多路冗余速度位置信息进行预处理和自适应加权融合处理;给出基于加权融合UKF的常导高速磁浮列车测速定位算法模型;基于磁浮列车测速定位在环测试试验台试验,对改进后的无迹卡尔曼滤波磁浮定位算法与原定位算法进行了对比分析. 分析结果表明:磁浮列车平均速度误差减小了32.6%,速度极差降低了49.3%,有效消除了信号采集噪声,提高了磁浮列车测速定位精度.
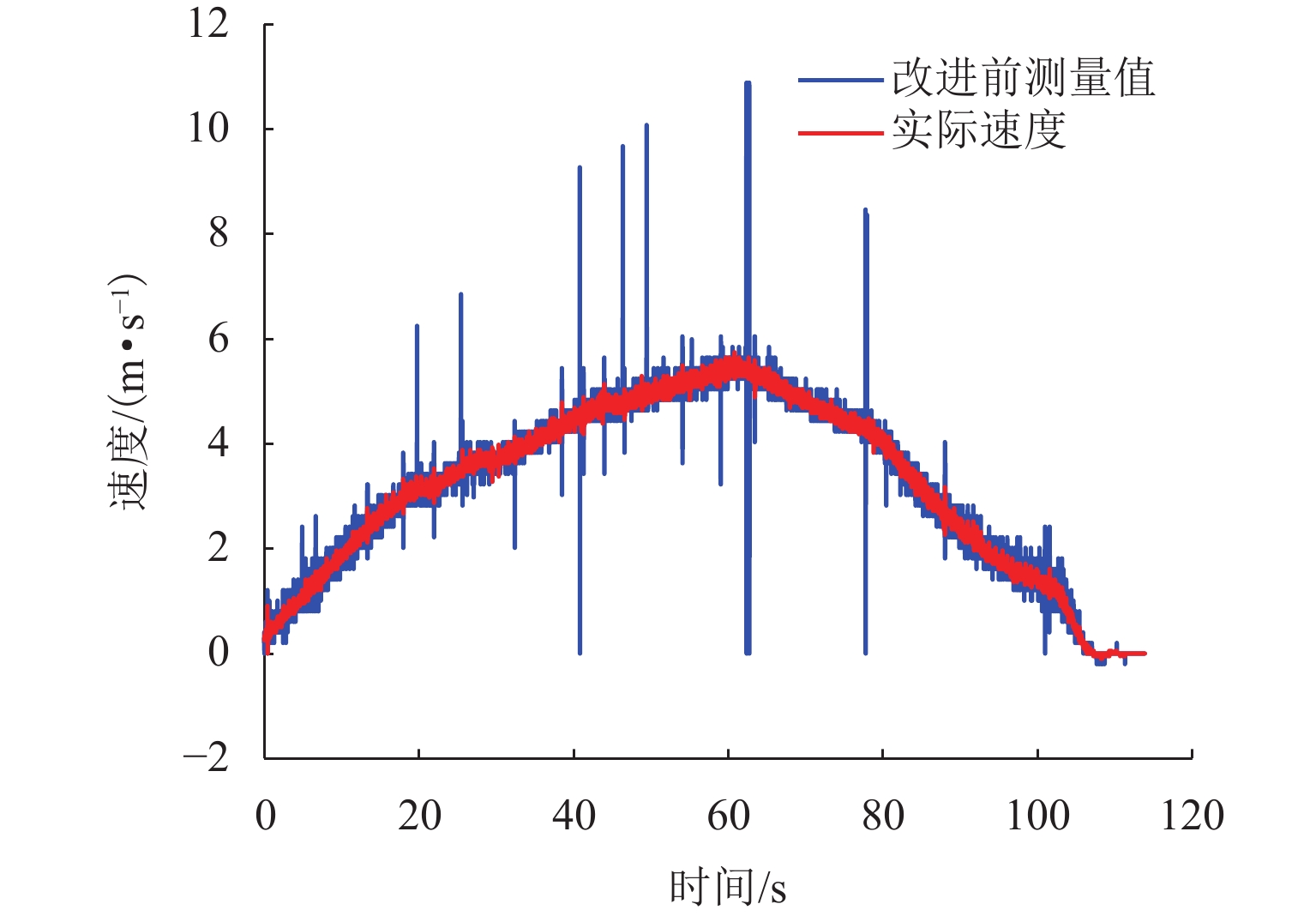
Abstract:The positioning and speed measurement method for normal-conducting high-speed maglev trains based on tooth slot detection of long stator may have inaccurate positioning caused by the lack of speed measurement and positioning signal, interference, and installation error of speed measurement and positioning during maglev train operation. Therefore, in order to improve the accuracy of positioning and speed measurement of high-speed maglev trains, an unscented Kalman filter (UKF) speed measurement and positioning algorithm for normal-conducting high-speed maglev trains based weighted fusion was proposed. The speed measurement and positioning method for high-speed maglev trains based on the tooth slot of a long stator was introduced, and the multi-channel redundant speed and position information was pre-treated, adaptively weighted, and fused. The UKF speed measurement and positioning algorithm for normal-conducting high-speed maglev trains based on weighted fusion was given. Based on the speed measurement and positioning in-loop test of the maglev train on a testbed, the improved UKF maglev position algorithm was compared with the original positioning algorithm. The analysis shows that the average speed error of the maglev train is reduced by 32.6%, and the speed range is reduced by 49.3%, which effectively eliminates the signal acquisition noise and improves the accuracy of speed measurement and positioning of maglev trains.
-
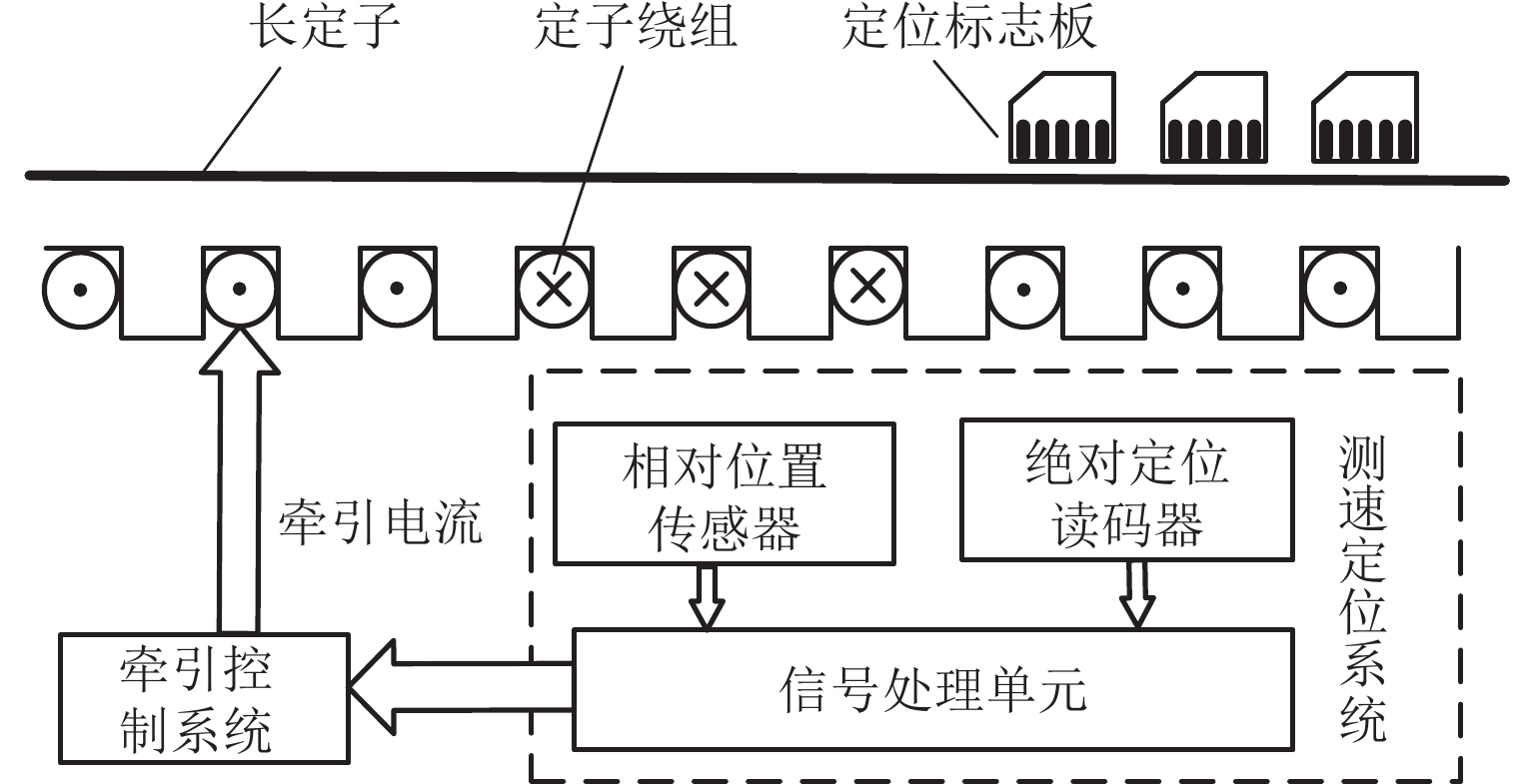
图 1 基于长定子齿槽检测的测速定位示意
Figure 1. Speed measurement and positioning based on tooth slot detection of long stator
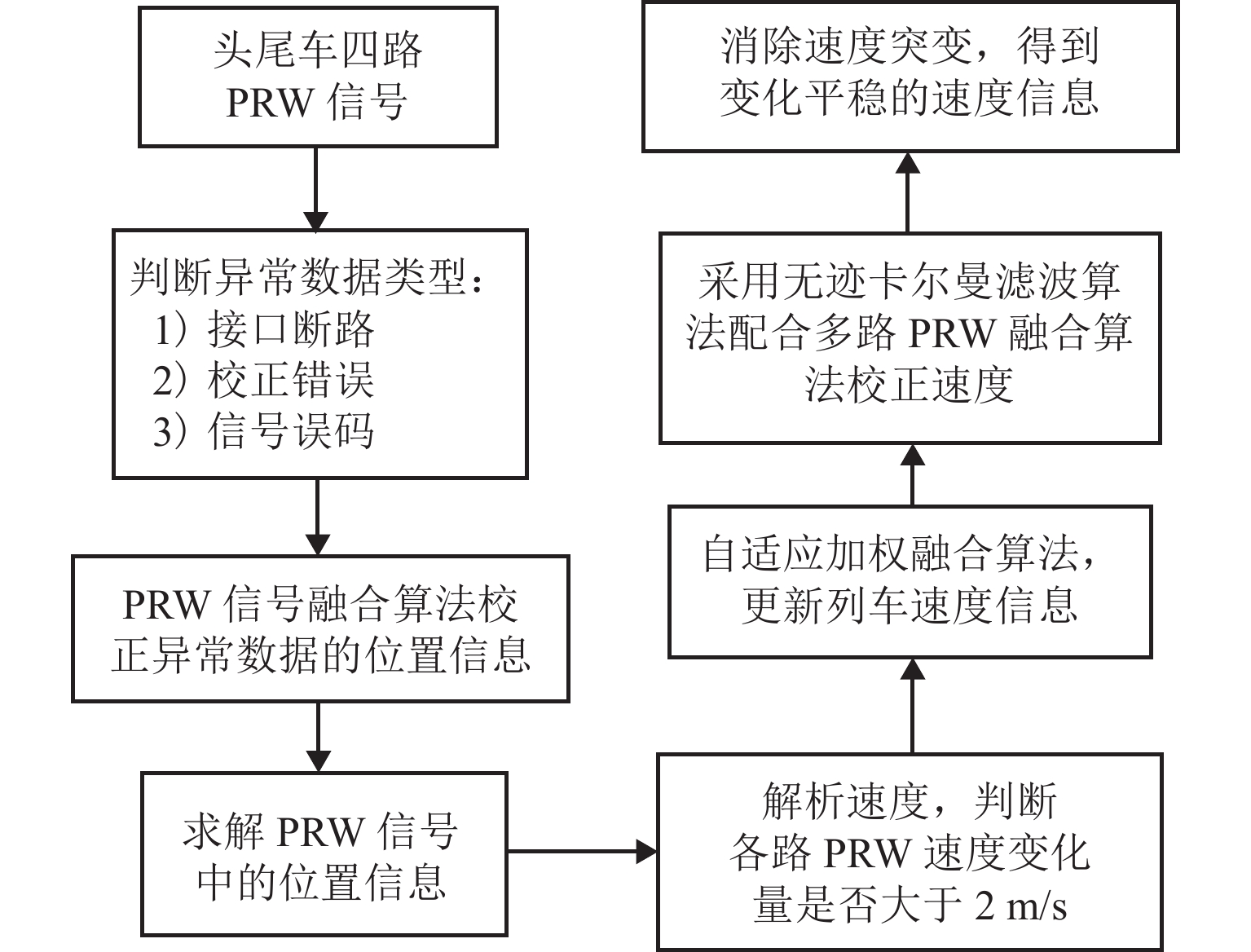
图 2 多路定位信号融合算法流程
Figure 2. Flowchart of multi-channel positioning signal fusion algorithm
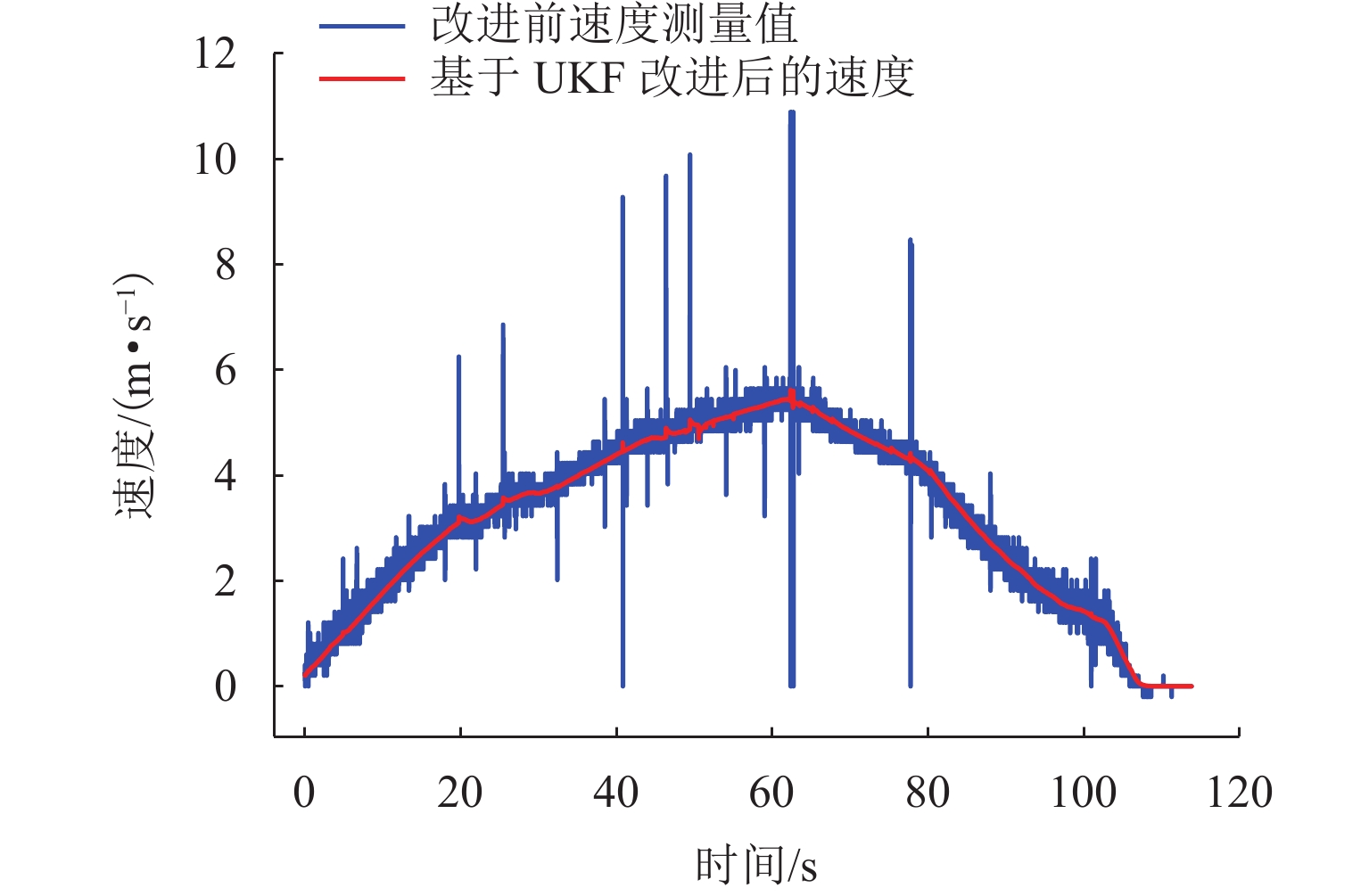
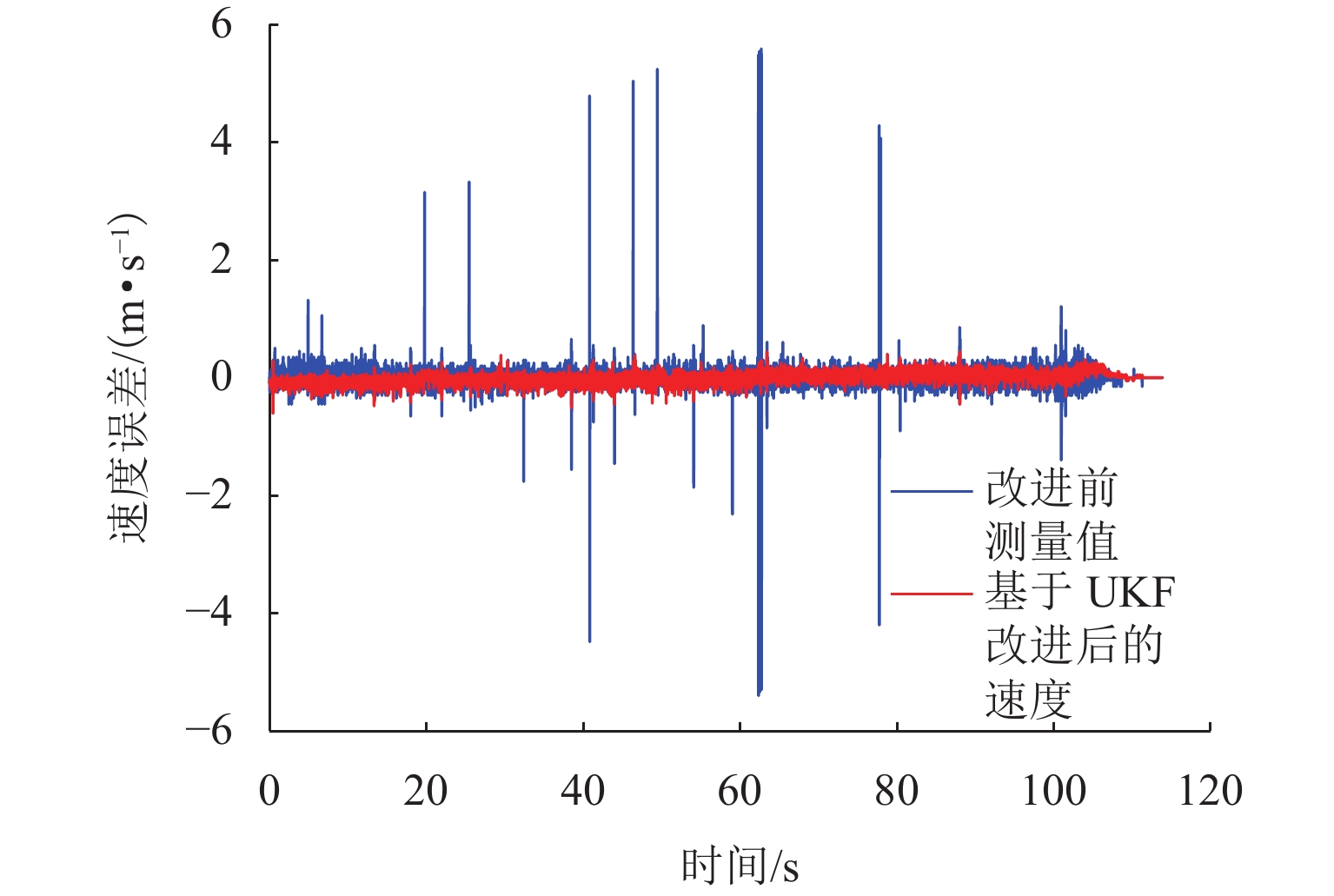
图 5 速度测量值与基于加权融合的UKF改进速度对比
Figure 5. Comparison of measured speed and speed after application of UKF based on weighted fusion
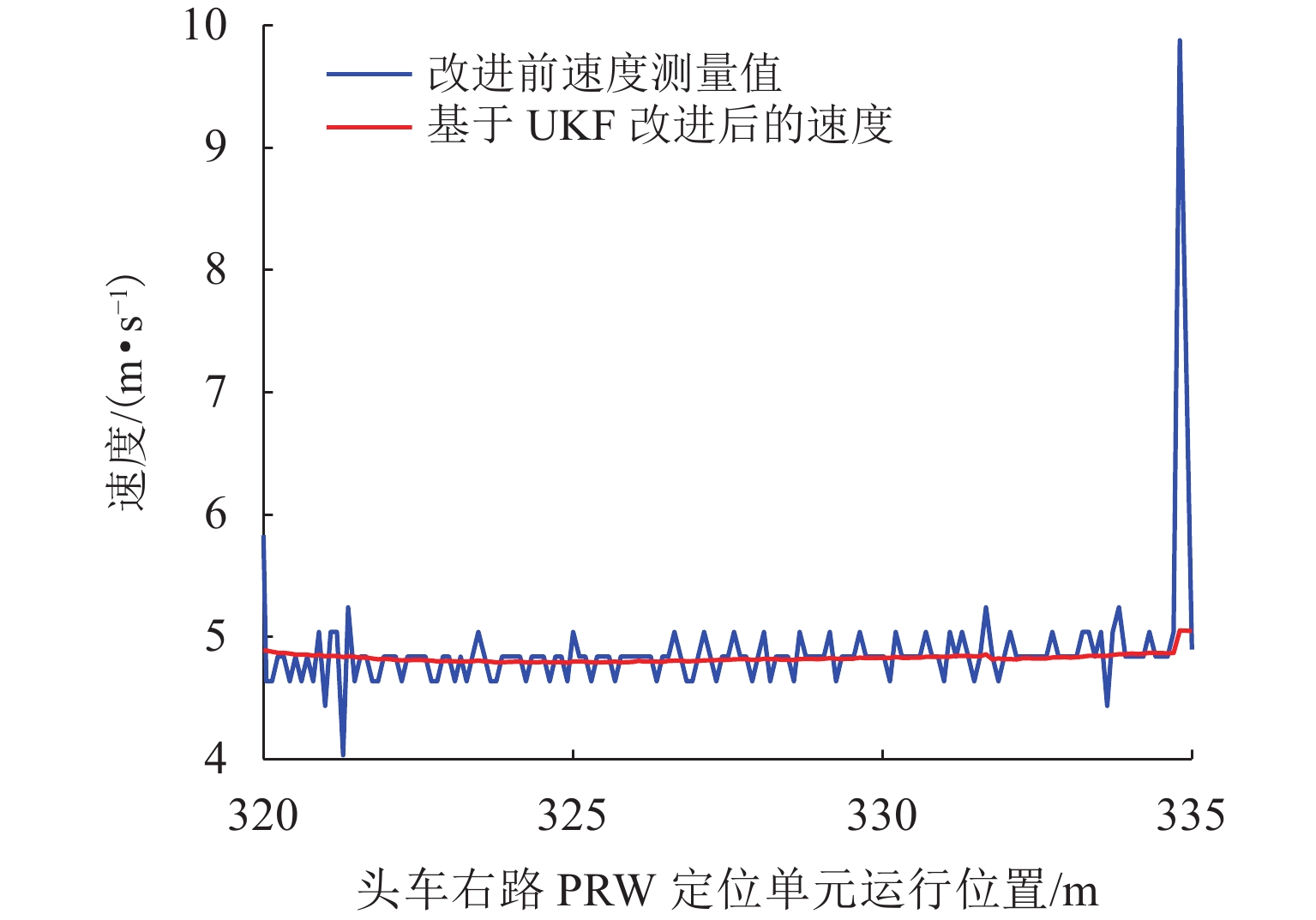
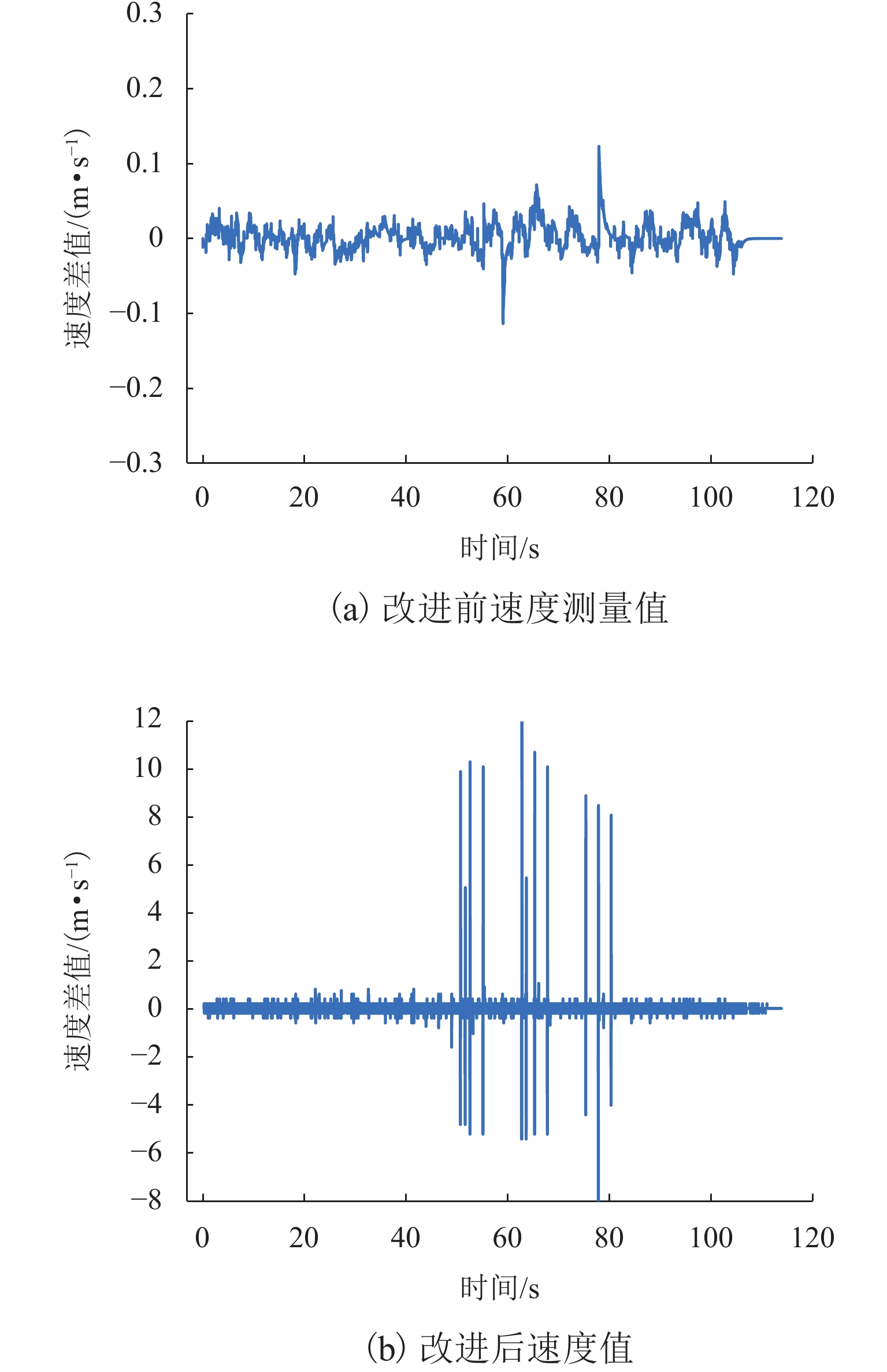
图 7 头车右路速度测量值与应用基于加权融合的UKF算法后的速度对比
Figure 7. Comparison of measured right-channel speeds of head train and speed after application of UKF algorithm based on weighted fusion
-
[1] 邹逸鹏. 高速磁浮列车系统动力学仿真与参数优化研究[D]. 成都: 西南交通大学,2021. [2] 蔡煊,王长林. 基于改进UKF的BDS/IMU组合列车定位方法[J]. 西南交通大学学报,2020,55(2): 393-400.CAI Xuan, WANG Changlin. BeiDou navigation satellite system/inertial measurement unit integrated train positioning method based on improved unscented Kalman filter algorithm[J]. Journal of Southwest Jiaotong University, 2020, 55(2): 393-400. [3] SAAB S S. A map matching approach for train positioning I: development and analysis[J]. IEEE Transactions on Vehicular Technology, 2000, 49(2): 467-475. doi: 10.1109/25.832978 [4] 亓宝进. 磁浮列车测速定位系统硬件在环仿真系统研究[D]. 北京: 北京交通大学,2022. [5] 孟川舒. 高速磁浮列车测速定位问题综述[J]. 铁道标准设计,2024,68(1): 178-184,211.MENG Chuanshu. Review on problems of speed measurement and positioning of high speed maglev train[J]. Railway Standard Design, 2024, 68(1): 178-184,211. [6] 张世聪. 适用于磁浮列车的测速定位方法研究综述[J]. 铁道标准设计,2018,62(10): 186-191.ZHANG Shicong. Research review of speed and position detection methods applied to maglev trains[J]. Railway Standard Design, 2018, 62(10): 186-191. [7] 罗桂斌. 高速磁浮定位测速系统信号处理技术研究[D]. 长沙: 国防科技大学,2017. [8] 窦峰山,何洪礼,谢云德,等. 基于跟踪微分器的磁浮列车定位测速系统信号处理问题研究[J]. 铁道学报,2016,38(1): 81-85.DOU Fengshan, HE Hongli, XIE Yunde, et al. Research on the signal processing of position and speed detection system in maglev train based on tracking differentiator[J]. Journal of the China Railway Society, 2016, 38(1): 81-85. [9] 吴峻,周文武,李璐. 高速磁浮列车测速定位系统的研究[J]. 国防科技大学学报,2011,33(1): 109-114.WU Jun, ZHOU Wenwu, LI Lu. Research on speed and position detection system of high speed maglev train[J]. Journal of National University of Defense Technology, 2011, 33(1): 109-114. [10] 唐志一,蔡颖,王会. 基于自适应加权算法的多传感器数据融合方法[J]. 指挥信息系统与技术,2022,13(5): 66-70.TANG Zhiyi, CAI Ying, WANG Hui. Multi-sensor data fusion method based on adaptive weighting algorithm[J]. Command Information System and Technology, 2022, 13(5): 66-70. [11] 张亮. 基于EKF的GPS/ODO列车定位方法研究[D]. 北京: 北京交通大学,2016. [12] JIANG Z Q, LIU C H, ZHANG G, et al. GPS/INS integrated navigation based on UKF and simulated annealing optimized SVM[C]//2013 IEEE 78th Vehicular Technology Conference. Las Vegas: IEEE, 2013: 1-5. [13] 赵玏洋,闫利. 移动机器人SLAM位姿估计的改进四元数无迹卡尔曼滤波[J]. 测绘学报,2022,51(2): 212-223.ZHAO Leyang, YAN Li. Advanced quaternion unscented Kalman filter based on SLAM of mobile robot pose estimation[J]. Acta Geodaetica et Cartographica Sinica, 2022, 51(2): 212-223. -

 下载:
下载:


 点击查看大图
点击查看大图
计量
- 文章访问数: 615
- HTML全文浏览量: 401
- PDF下载量: 57
- 被引次数: 0