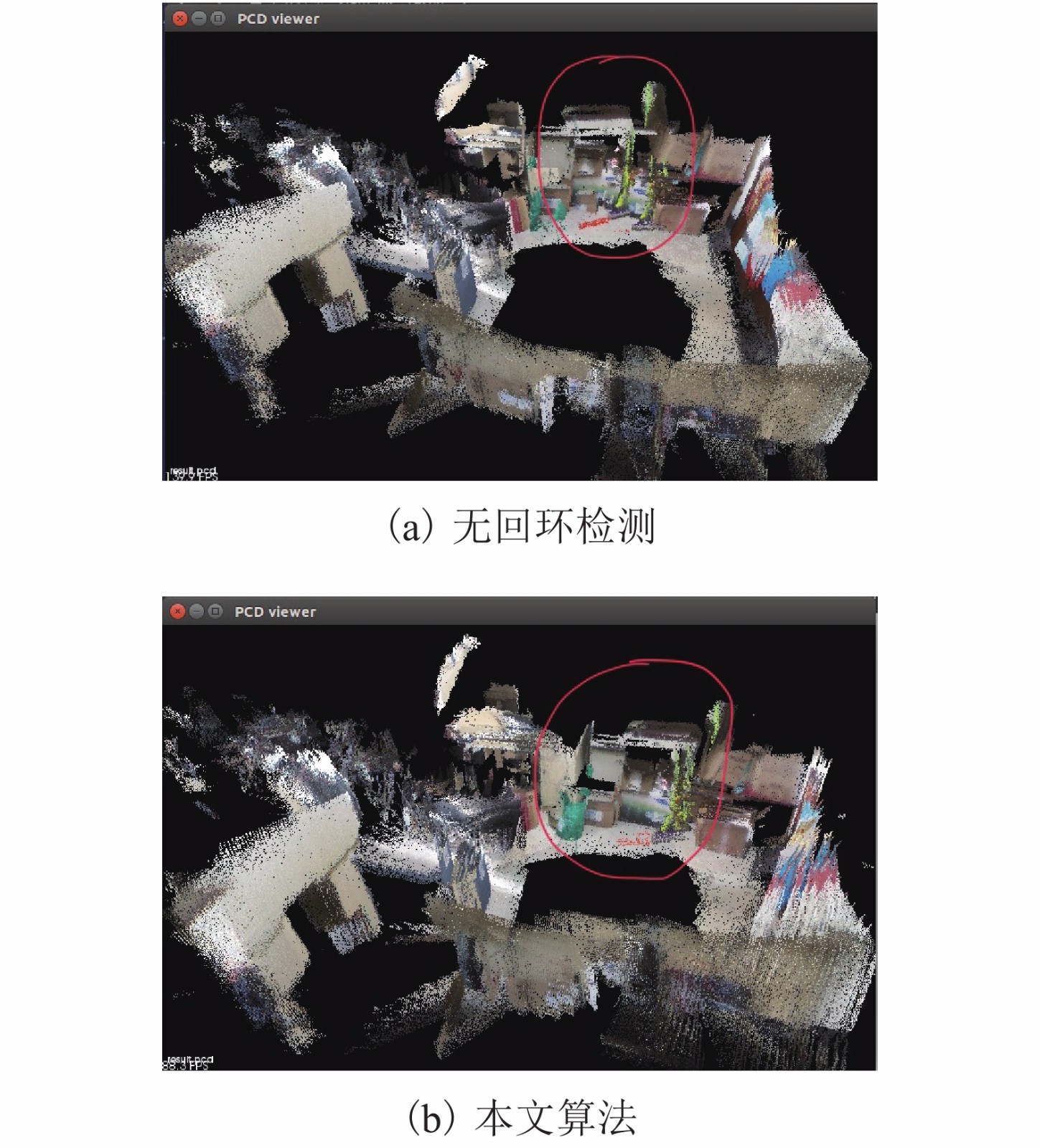
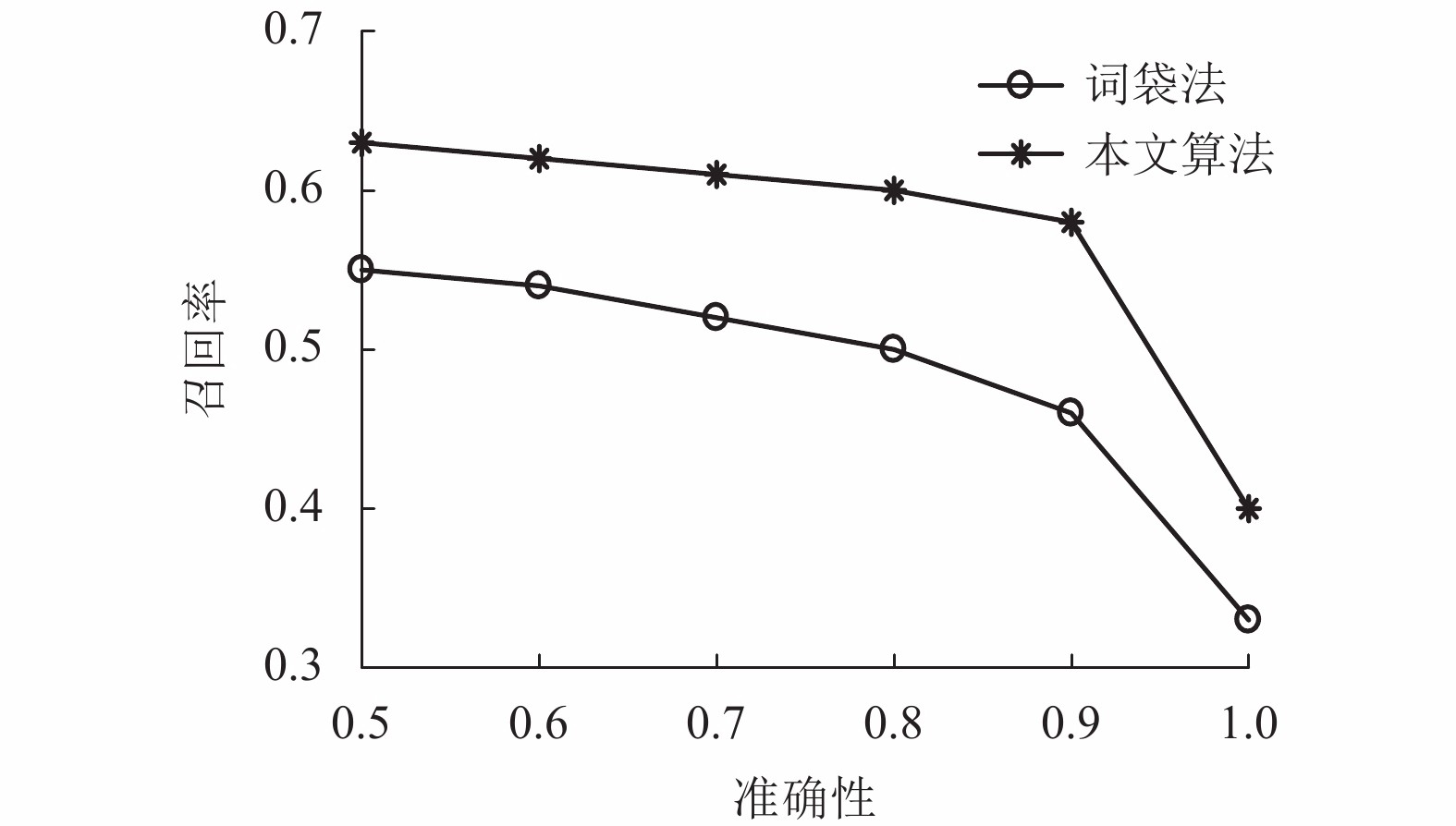
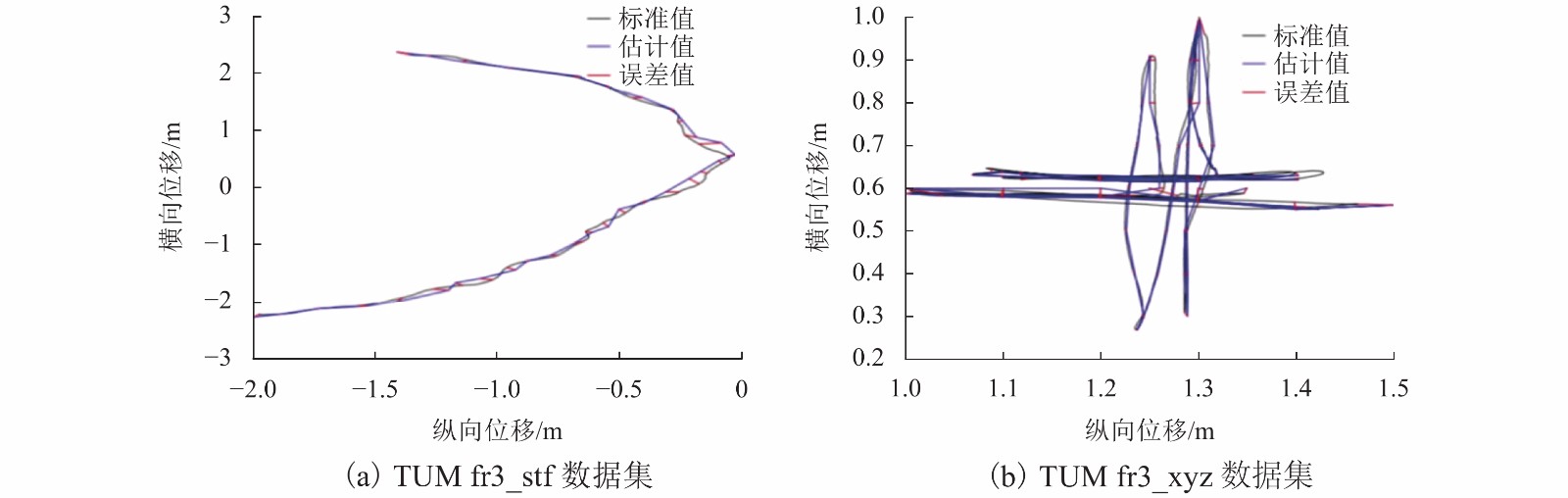
摘要: 传统视觉即时定位与建图(SLAM)算法若无回环检测可能会存在累积误差无法消除的现象,即使有回环检测,也因准确率和效率比较低而无法应用于轻量级设备上,为此,研究一种回环检测优化的视觉SLAM算法. 前端估计时,对相邻帧图像进行ORB (oriented fast and rotated brief)特征提取与匹配,对匹配成功的特征点进行PnP (perspective-n-point)求解,获得相机运动估计并筛选出关键帧图像;后端优化时,利用SqueezeNet卷积神经网络 (CNN)提取图像的特征向量,计算余弦相似度判断是否出现回环,若出现回环则在位姿图中增加相应约束,利用图优化理论对全局位姿进行整体优化;最后利用项目组制作的数据集和TUM (technical university of munich)公开数据集进行测试与对比. 研究结果表明:相比于无回环检测算法,本文方法可以成功检测到回环并为全局轨迹优化增添约束;相比于传统词袋法,在回环检测准确率相同的情况下,本文方法召回率可提高21%且计算耗时减少74%;与RGB-D (red green blue-depth) SLAM算法相比,本文方法建图误差可降低29%.


 高级检索
高级检索
 Email alert
Email alert RSS
RSS 摘要
摘要 HTML全文
HTML全文 PDF 1867KB
PDF 1867KB 附件
附件 施引文献
施引文献