

Continuous Power Supply Scheme and Power Flow Algorithm of Traction Cables for Urban Railways
-
摘要: 研究了市域铁路牵引电缆贯通供电方案,该方案全线贯通式供电,设置一主一备两个主变电所,在主变电所内设置同相供电装置. 对贯通式供电时双边供电、单边供电下供电臂距离的设置进行了建模求解,模型以电压损失作为约束条件,通过逐渐增加列车数量的方式,求得供电臂所能承担最大列车数量,进一步得到供电臂距离的可行值,为牵引变压器位置的设置提供参考和校验. 采用基于线路的牵引供电系统建模,将牵引供电系统分为电缆层和牵引层,提出适用于牵引电缆贯通供电的分层交互迭代潮流算法. 该算法在层内进行潮流求解,同时层之间进行变量取值修正,以实现交互迭代,能够达到矩阵降阶、提高计算效率的目的. 在本文案例分析中,相较于传统供电方案,牵引电缆贯通供电方案再生制动能量利用率提升至99.15%,每年通过再生制动能量利用可以节省的电费为2 955万元,一次性投资可以节省大约13 672万元.
-
关键词:
- 铁路 /
- 牵引电缆贯通供电 /
- 供电距离 /
- 分层交互迭代潮流算法 /
- 再生制动
Abstract: Continuous power supply scheme of traction cables is explored for urban railways, in which the power runs through the whole line, and two main substations are set with the same phase power supply devices, one for primary use and one for standby. The feeding section distance is modeled and solved in the cases of the unilateral and bilateral continuous power supply. The model takes the voltage loss as a constraint condition, and the maximum number of trains that the feeding section can supply is obtained by solving the model in a way of gradual increase in the number of trains. Further, the allowable value of the feeding section distance is calculated, which provides a reference for the position setting and checking of the traction transformer. To develop a layered power flow algorithm with interactive iteration, the line-based traction power supply system is modeled, and the traction power supply system is divided into the cable layer and traction layer. In this algorithm, the power flow is solved within the layer, and the variable values are modified between the layers to realize interactive iteration and obtain the final calculation results. This algorithm has the merits of reducing matrix order and increasing computational efficiency. The case analysis shows that in contrast to the traditional power supply scheme, the continuous power supply scheme can increase the utilization rate of regenerative braking energy by 99.15%, and reduce the annual electricity cost by 29.55 million yuan with the use of regenerative braking energy, and the non-recurring investment by 136.72 million yuan. -
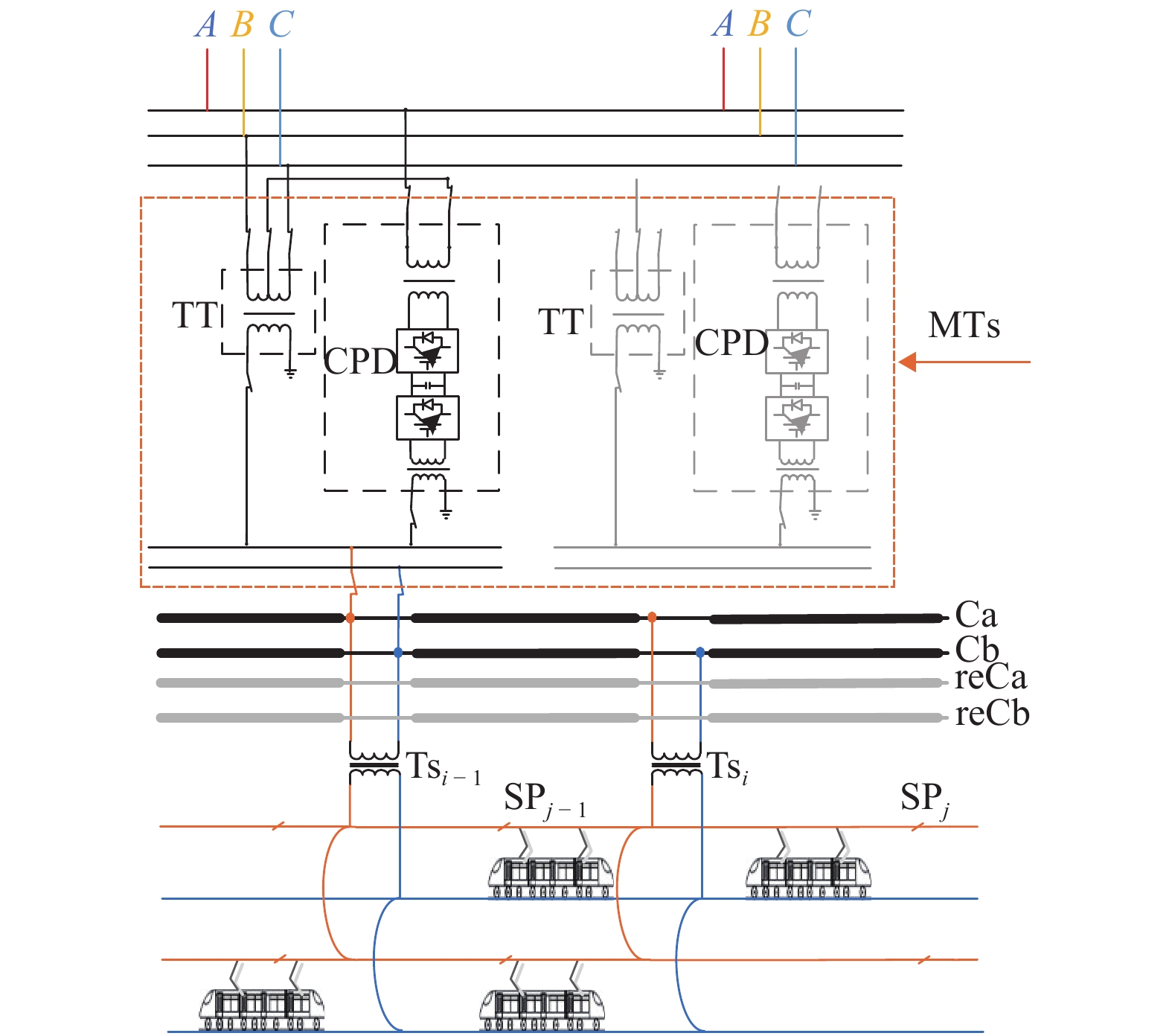
图 1 市域铁路牵引电缆贯通供电方案示意
Figure 1. Schematic diagram of continuous power supply scheme for urban traction cables

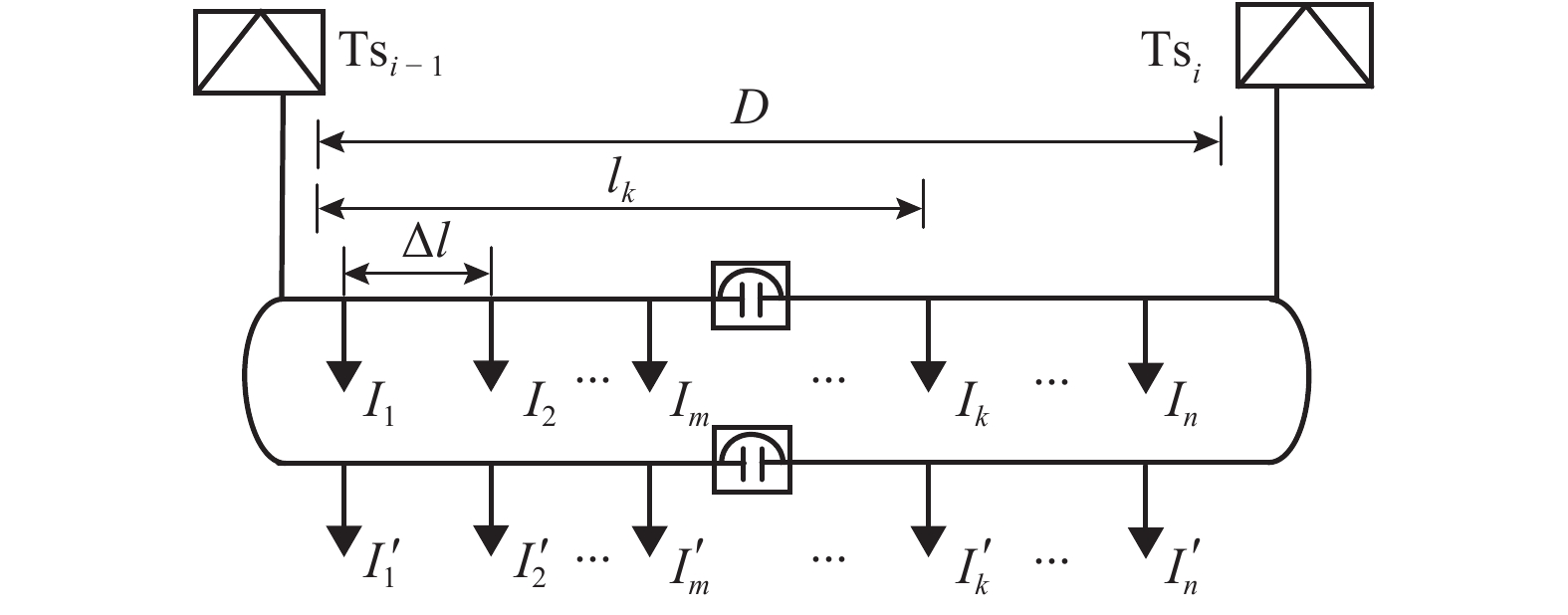
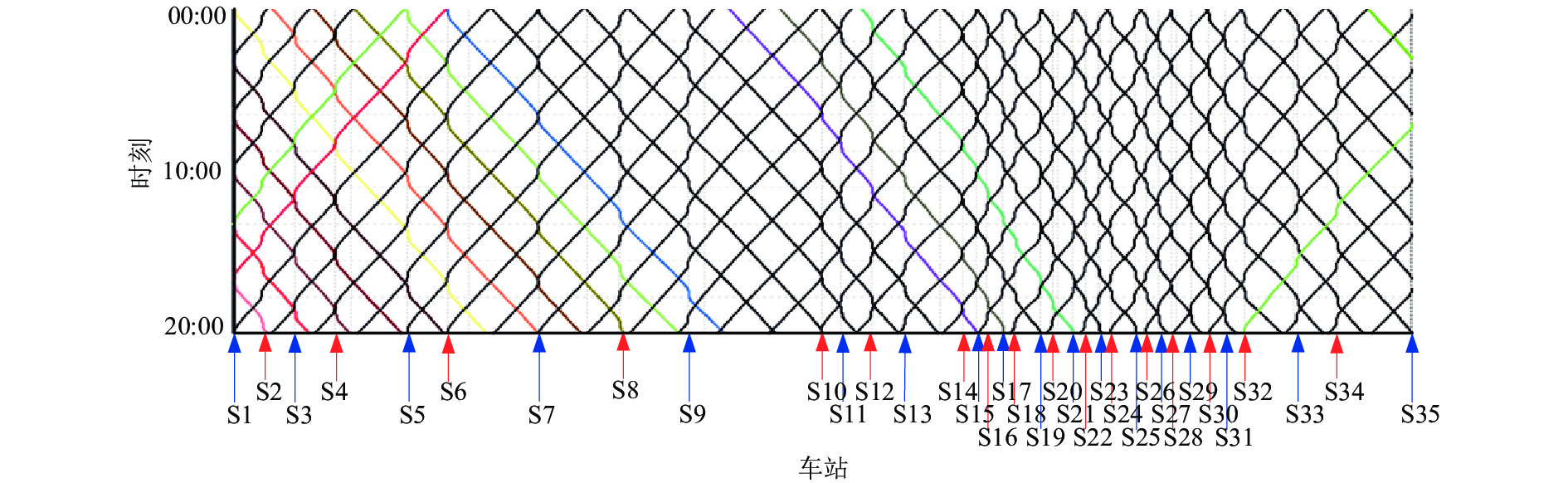
图 4 基于整条线路的牵引层供电系统结构
Figure 4. Power supply system structure of traction layer based on whole line
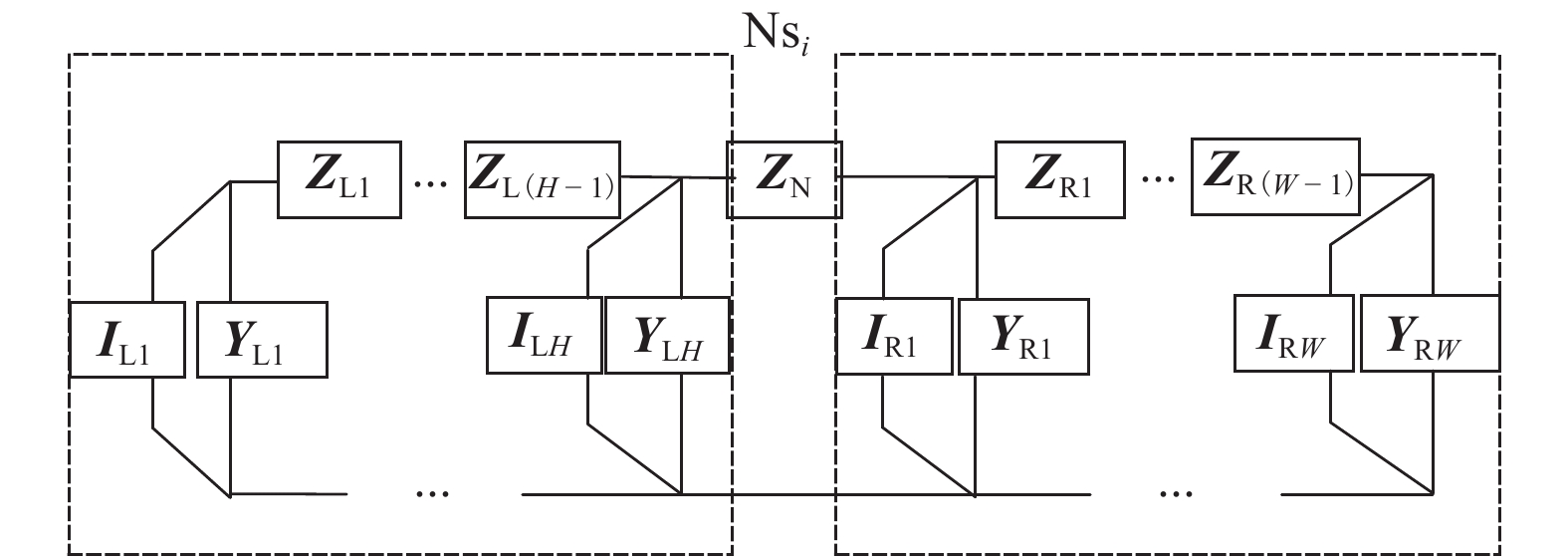
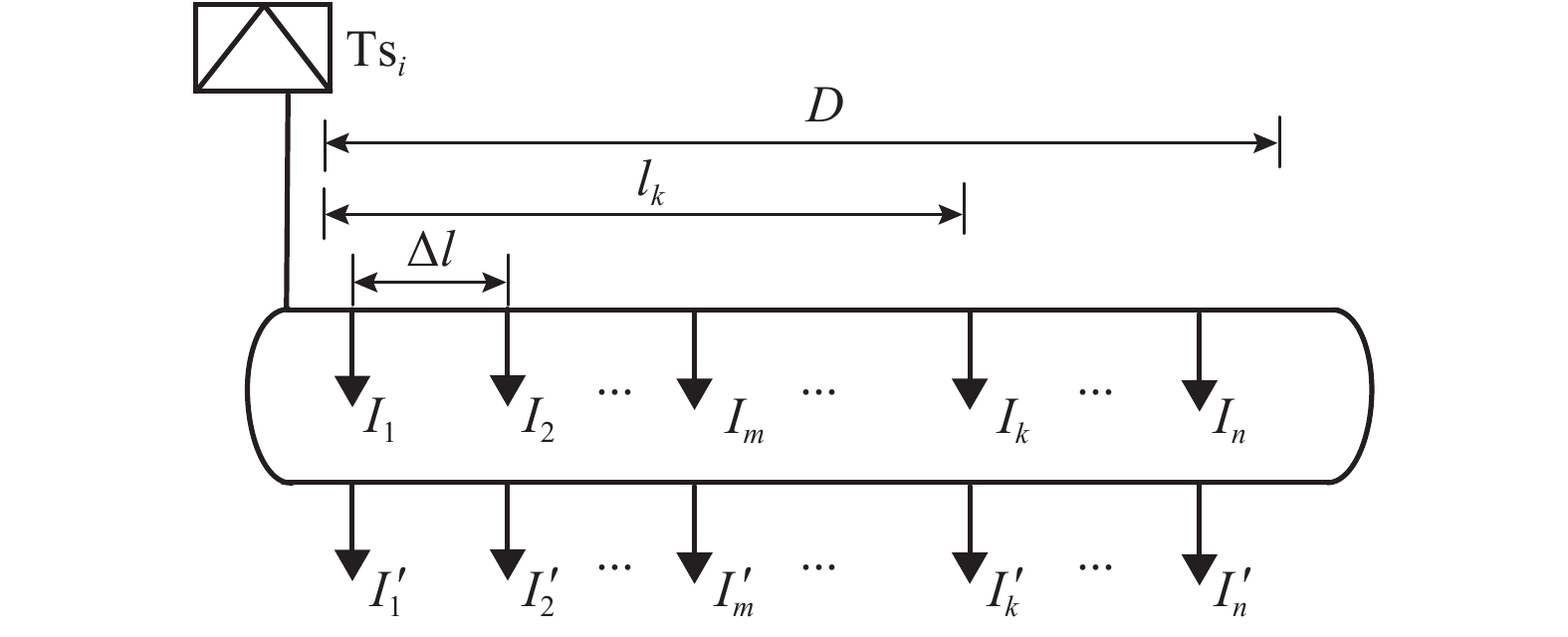
图 5 第i个牵引变压器供电范围链式结构等效模型
Figure 5. Equivalent model of chain structure in power supply range of ith traction transformer
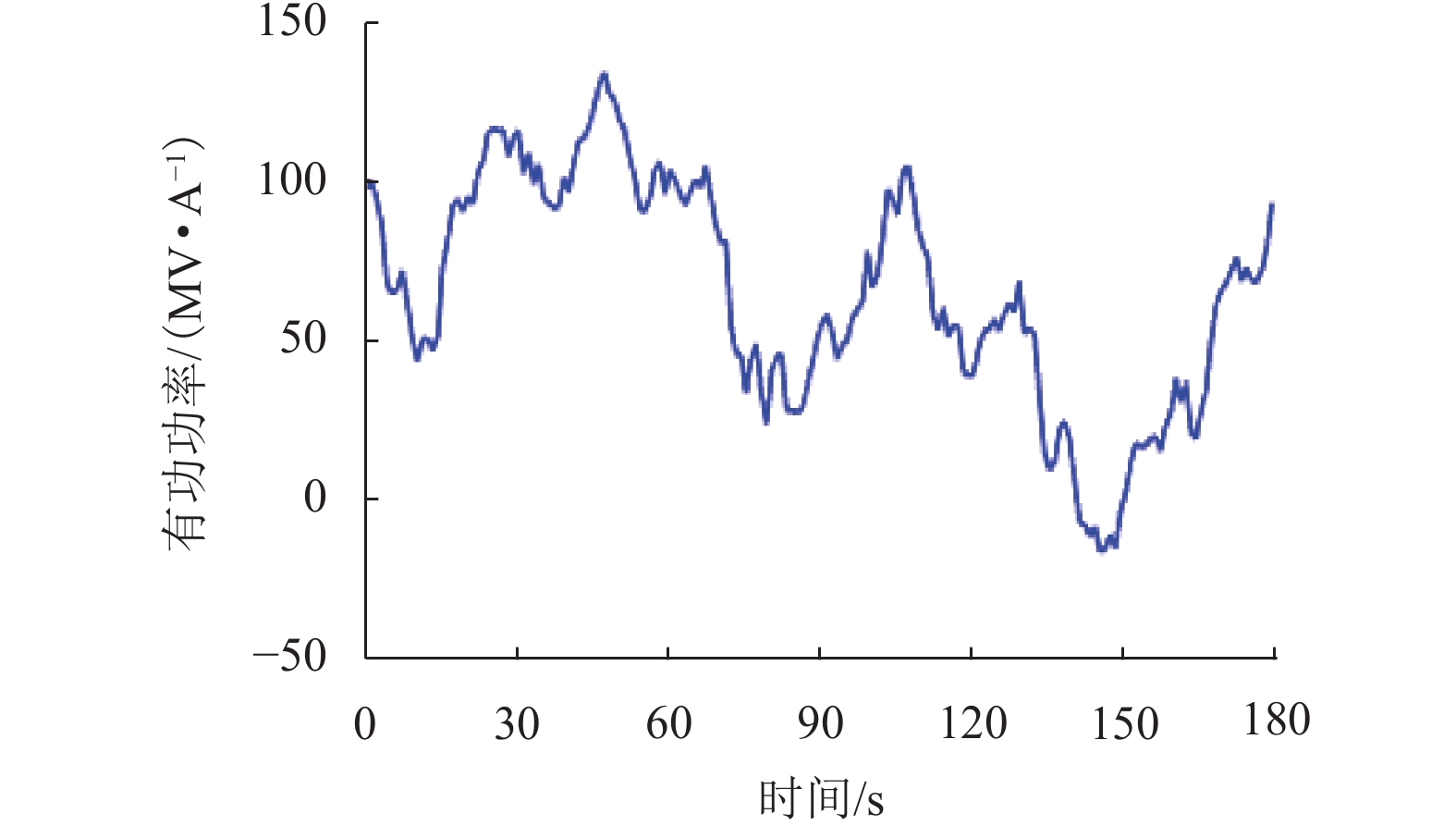
图 7 牵引电缆贯通供电主变电所馈线处有功功率曲线
Figure 7. Active power curve at feeder of main substation in continuous power supply scheme
表 1 牵引变压器设置
Table 1. Settings of traction transformers
牵引变压器 位置/km 接线形式 容量/(MV•A) 1 6.21 Vv 20.0 + 25.0 2 19.65 Vv 16.0 + 25.0 3 40.66 Vv 31.5 + 31.5 4 69.54 Vv 31.5 + 31.5 5 87.21 Vv 25.0 + 25.0  下载: 导出CSV
下载: 导出CSV
表 3 牵引变压器设置
Table 3. Settings of traction transformers
牵引变压器 位置/km 接线形式 容量/(MV•A) 1 15.5 单相 40.0 2 37.8 单相 40.0 3 60.2 单相 40.0 4 85.4 单相 40.0
下载: 导出CSV
表 4 仿真结果统计
Table 4. Statistics of simulation results
方案 牵引网最低网压/kV 再生制动能量
利用率/%反馈回110 kV侧再生制
动能量/(MW•h•a−1)PCC点平均
功率因数视在功率最大值/(MV•A) 牵引变
电所1牵引变
电所2牵引变
电所3牵引变
电所4牵引变
电所5传统供电 23.5 88.84 42 656.64 0.948 7 24.4 22.8 52.0 55.1 46.6 牵引电缆
贯通供电23.7 99.15 3 250.84 0.975 6 32.2 27.8 39.7 52.6
下载: 导出CSV
表 5 牵引电缆贯通供电方案主要投资
Table 5. Main investment of traction cables in continuous power supply scheme
投资项目 数量/(容量) 单价/万元 费用/万元 电缆(500 mm2) 4 × 100 km 37.4 14 960 外部电源 1 个 10 000.0 10 000 单相主变压器 2 台 1 296.0 2 592 同相补偿装置 90 MV•A 140.0 12 600 牵引变压器 8 台 540.0 4 320 费用总计 44 472
下载: 导出CSV
表 6 传统供电方案主要投资
Table 6. Main investment in traditional power supply scheme
投资项目 数量/(容量) 单价/万元 费用/万元 外部电源 5 个 10 000.0 50 000 地面自动过分相
装置4 台 600.0 2 400 牵引变压器 10 台 − 5 744 费用总计 58 144
下载: 导出CSV
-
李群湛. 城市轨道交通交流牵引供电系统及其关键技术[J]. 西南交通大学学报,2015,50(2): 199-207. doi: 10.3969/j.issn.0258-2724.2015.02.001LI Qunzhan. AC rail traction power supply system and its key technologies[J]. Journal of Southwest Jiaotong University, 2015, 50(2): 199-207. doi: 10.3969/j.issn.0258-2724.2015.02.001 李群湛, 易东, 吴积钦, 等. 一种电气化铁路同轴电缆供电系统: 中国, CN203920466U[P]. 2014-11-05 刘炜,刘雪晴,王辉,等. 基于SVG的市域铁路牵引供电系统供电方案[J]. 中国铁道科学,2019,40(4): 129-136. doi: 10.3969/j.issn.1001-4632.2019.04.16LIUWei, LIU Xueqing, WANG Hui, et al. Power supply scheme of traction power supply system of city railway based on SVG[J]. China Railway Science, 2019, 40(4): 129-136. doi: 10.3969/j.issn.1001-4632.2019.04.16 GUO Xinxin, LI Qunzhan, XIE Shaofeng, et al. Modeling and capacitance effect analysis of the cable traction network of an electrified railway[J]. Proceedings of the Institution of Mechanical Engineers, 2016, 230(8): 1803-1811. doi: 10.1177/0954409715615157 郭鑫鑫. 电气化铁路电缆牵引网研究[D]. 成都: 西南交通大学, 2016. 郭鑫鑫,李群湛,解绍锋,等. 电气化铁路高压电缆牵引网电气特性研究[J]. 电力自动化设备,2015,35(12): 132-137.GUO Xinxin, LI Qunzhan, XIE Shaofeng, et al. Electrical characteristic of cable traction network for electrified railway[J]. Electric Power Automation Equipment, 2015, 35(12): 132-137. 周婷,解绍锋. 电气化铁路牵引电缆贯通供电方案[J]. 电力自动化设备,2018,38(7): 189-195,206.ZHOU Ting, XIE Shaofeng. New-type cable traction power supply scheme of electric railroad[J]. Electric Power Automation Equipment, 2018, 38(7): 189-195,206. GOODMAN C J, SIU L K, HO T K. A review of simulation models for railway systems[C]//International Conference on Development in Mass Transit Systems. [S.l.]: IEEE, 1998: 80-85. 吴命利. 电气化铁道牵引网的统一链式电路模型[J]. 中国电机工程学报,2010,30(28): 52-58.WU Mingli. Uniform chain circuit model for traction networks of electric railways[J]. Proceedings of the CSEE, 2010, 30(28): 52-58. 吴命利. 牵引供电系统电气参数与数学模型研究[D].北京: 北京交通大学, 2006. HSI P H, CHEN S L, LI R J. Simulating on-line dynamic voltages of multiple trains under real operating conditions for AC railways[J]. IEEE Transactions on Power Systems, 1999, 14(2): 452-459. doi: 10.1109/59.761865 HILL R J, CEVIK I H. On-line simulation of voltage regulation in autotransformer-fed AC electric railroad traction networks[J]. IEEE Transactions on Vehicular Technology, 2002, 42(3): 365-372. 何俊文. 牵引供电系统负荷过程仿真[D]. 成都: 西南交通大学, 2010. 何俊文,李群湛,刘炜,等. 交流牵引供电系统仿真通用数学模型及其应用[J]. 电网技术,2010,34(7): 25-29.HE Junwen, LI Qunzhan, LIU Wei, et al. General mathematical mode for simulation of AC traction power supply system and its application[J]. Power System Technology, 2010, 34(7): 25-29. -

 下载:
下载:

 点击查看大图
点击查看大图
计量
- 文章访问数: 890
- HTML全文浏览量: 493
- PDF下载量: 56
- 被引次数: 0