

Spatial Distribution Characteristics of Dynamic Displacement of Heavy-Haul Railway Subgrade System under Launching Impact Load
-
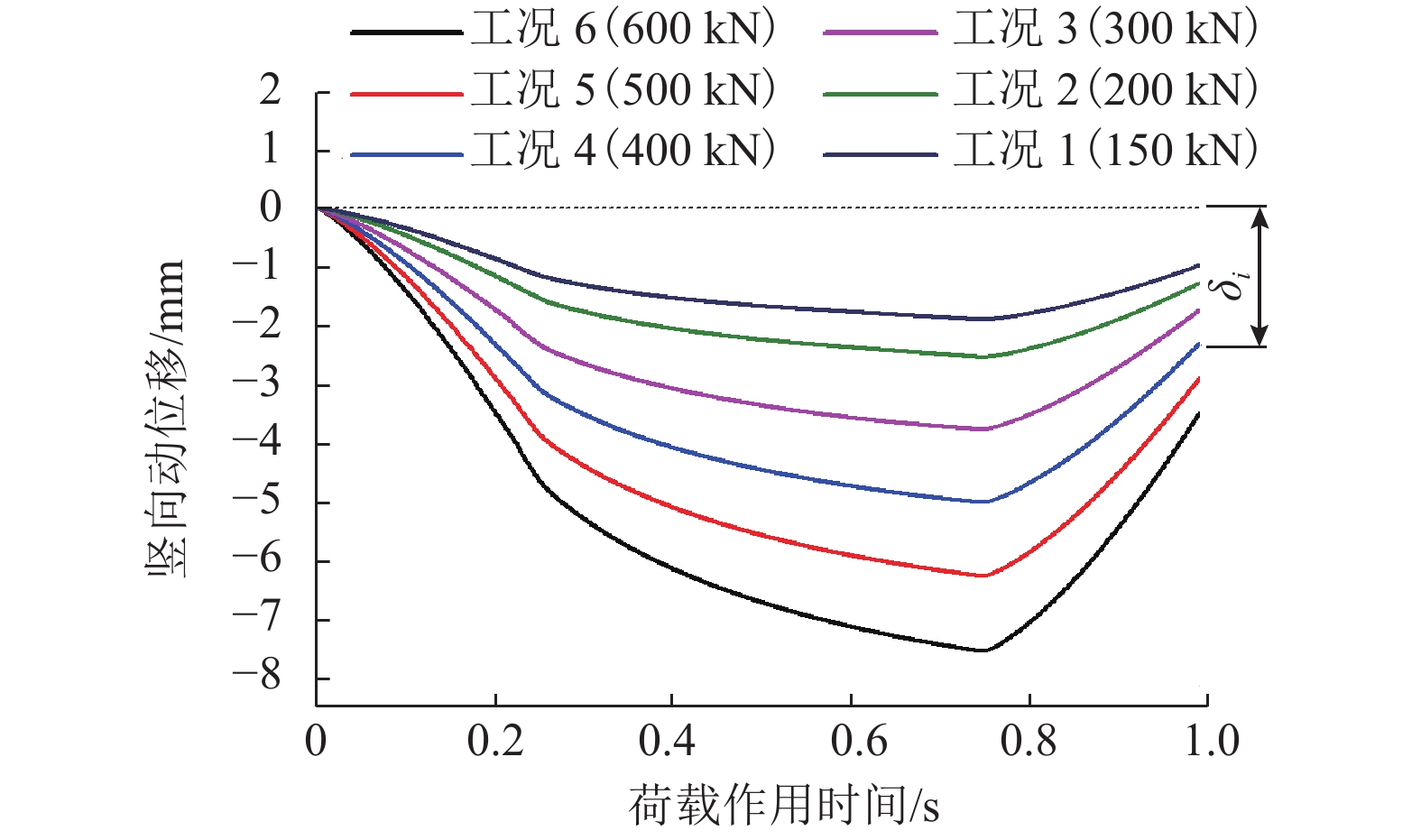
摘要: 为研究军用重载铁路路基动响应空间分布特征,通过高度非线性分析程序ANSYS/LS-DYNA3D建立了重载铁路轨道-路基-地基三维显式动力分析模型,并引入三维一致黏弹性人工边界;采用梯形冲击荷载模拟弹射冲击,探讨了不同幅值(150~600 kN)的弹射冲击荷载作用时重载铁路路基系统动位移的空间分布特征,通过Boussinesq弹性理论与林绣贤多层系统当量理论验证了数值模型的可靠性. 结果分析表明:当作用在轨道上的弹射荷载开始进入卸载状态时,路基系统的竖向动位移达到最大值;结束卸载时,道床顶面存在一定量的残余变形,且残余变形随荷载幅值增长呈线性增长,增长速率约为0.60 × 10−2 mm/kN;在不同荷载幅值下路基动位移沿线路横、纵向均呈对称分布,动位移沿竖向近似呈直线型衰减,且衰减速率随着荷载幅值的增加而增大;荷载幅值越大,路基动位移的轮对效应及道床和基床对钢轨动力的分担作用均越来越显著;路基的动位移峰值与荷载幅值大致呈线性关系,道床顶面的动位移峰值随荷载幅值增长最快,增长速率约为1.27 × 10−2 mm/kN,基床表层与基床底层次之,增长速率分别约为1.23 × 10−2、1.20 × 10−2 mm/kN,路基本体增长最慢,增长速率约为1.10 × 10−2 mm/kN.Abstract: To study the spatial distribution characteristics of dynamic response of military heavy-haul railway subgrade, using highly nonlinear analysis program ANSYS/LS-DYNA3D, a 3D explicit dynamic model of a track-subgrade-foundation system was established with the 3D consistent viscous-spring artificial boundary. The trapezoidal impulse load was used to simulate the launching impact load, and spatial distribution characteristics of the dynamic displacement of the subgrade system under loads of different amplitudes (150−600 kN) were discussed. The model reliability was then verified by Boussinesq elastic theory and Lin Xiuxian ’s multi-layer system equivalent theory. The results indicated that the vertical dynamic displacement of the subgrade system reaches the maximum value when the launching impact load on the track starts to unload. At the end of unloading, there is a certain amount of residual deformation in the top surface of the ballast bed, and the residual deformation increases linearly with an increase in load amplitude, and the growth rate is about 0.6 × 10−2 mm/kN. Under different load amplitudes, the dynamic displacement of the subgrade system is distributed symmetrically both laterally and longitudinally along the line, it decays linearly along the vertical direction, and the decaying rate increases with the increase of the load amplitude. The larger the load amplitude is, the more significant the wheelset effect of dynamic displacement and the contribution of ballast bed and subgrade bed to rail dynamic force are; the peak dynamic displacement of subgrade system is approximately linear with the load amplitude. With the increase of the load amplitude, the peak dynamic displacement of the ballast bed surface grows at the fastest rate of about 1.27 × 10−2 mm/kN, followed by the peak value of the subgrade bed surface and the subgrade bed bottom at growth rates of about 1.23 × 10−2 and 1.20 × 10−2 mm/kN, respectively, and the peak value of the subgrade body grow at the slowest rate of about 1.10 × 10−2 mm/kN.
-
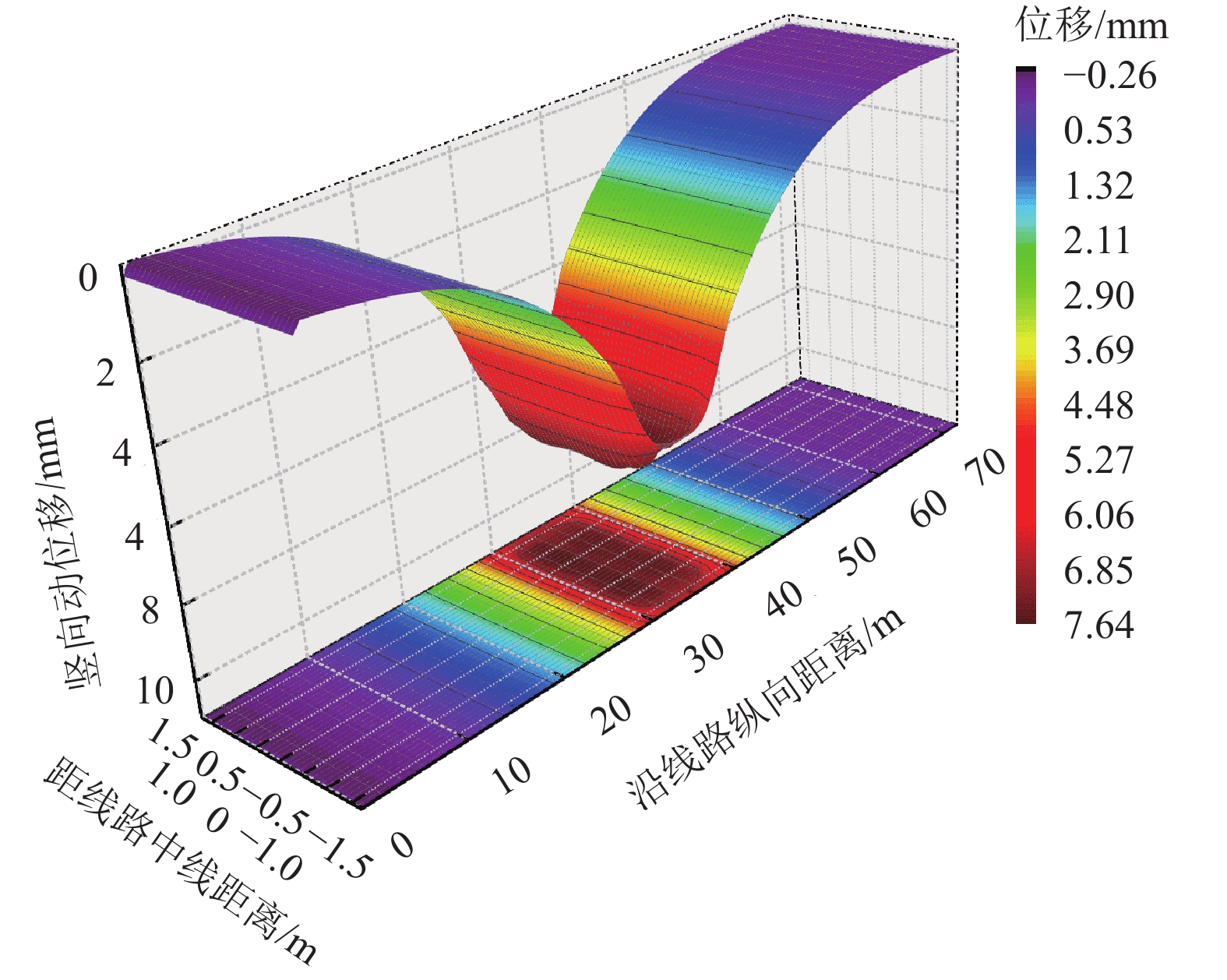
图 3 道床顶面动位移空间分布
Figure 3. Spatial distribution of dynamic displacement of ballast bed surface.

图 4 路基各结构层顶面动位移沿纵向的分布
Figure 4. Longitudinal distribution of dynamic displacement along the line
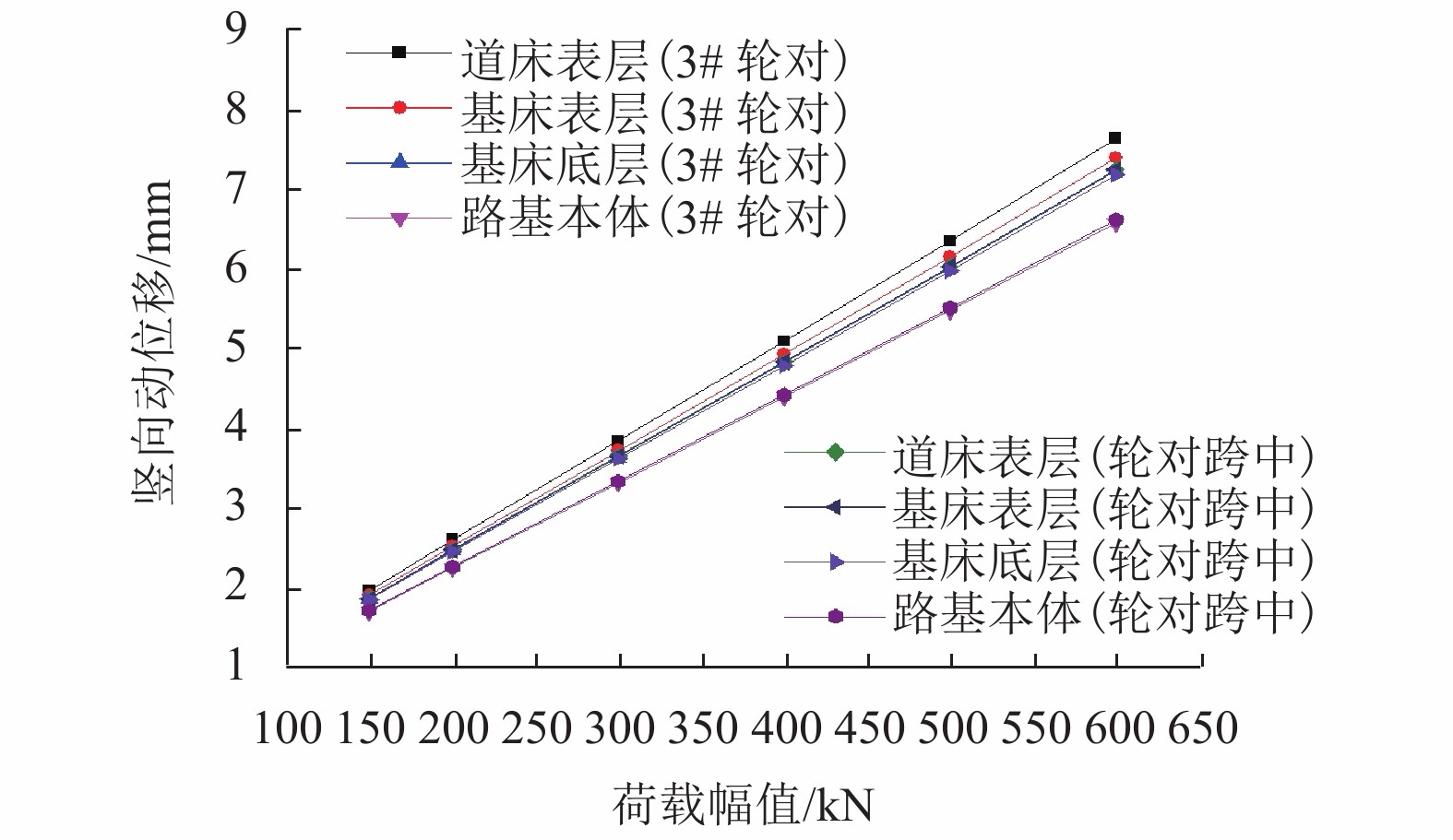
图 5 不同位置各结构层动位移与荷载幅值的关系
Figure 5. Relationship between dynamic displacement at different positions and load amplitude
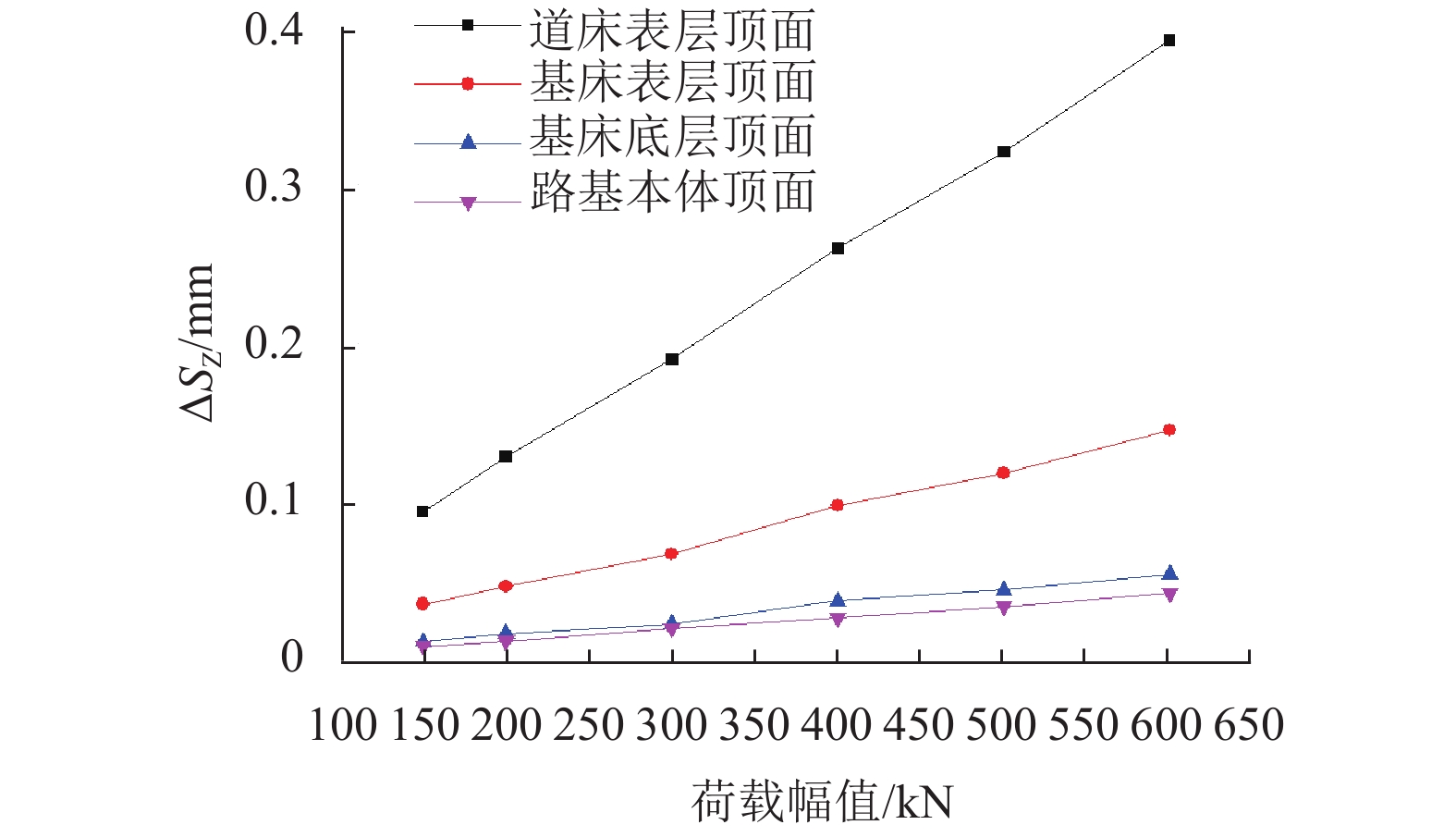
图 6 动位移差值与荷载幅值的关系曲线
Figure 6. Relationship between dynamic displacement difference and load amplitude

图 7 路基各结构层顶面动位移沿横向的分布
Figure 7. Lateral distribution of dynamic displacement along the line
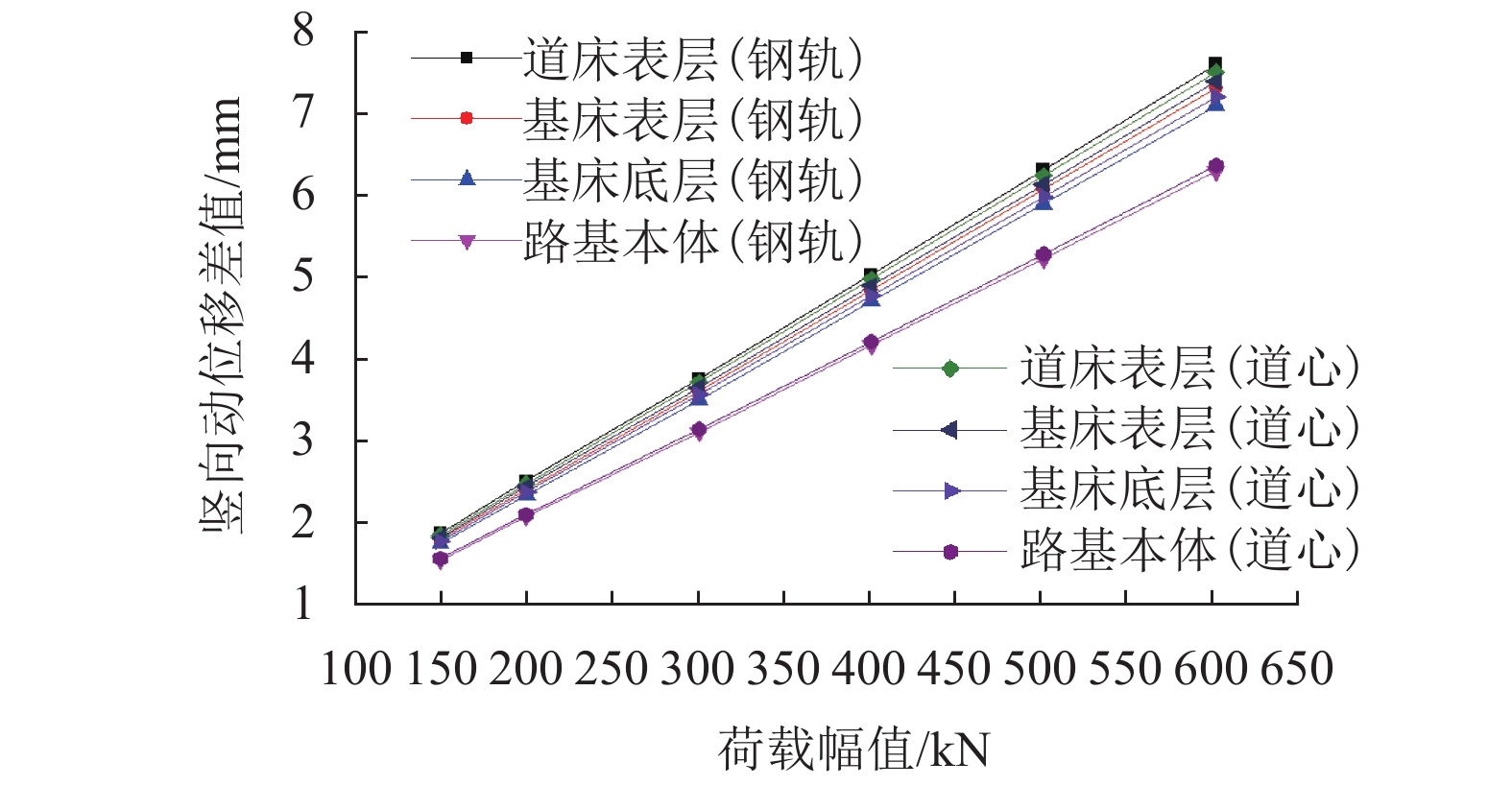
图 8 不同位置各结构层动位移与荷载幅值的关系
Figure 8. Relationship between dynamic displacement at different positions and load amplitude
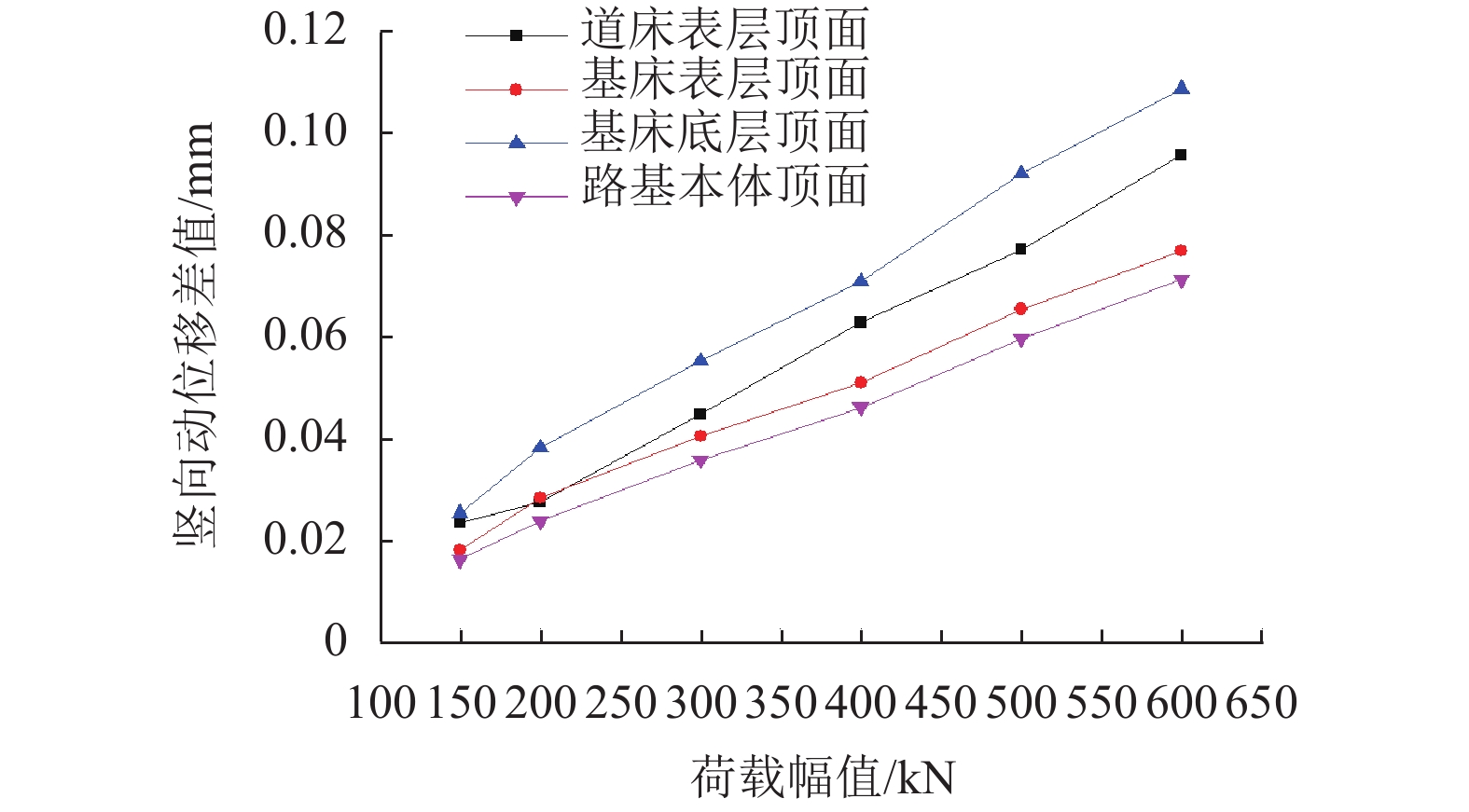
图 9 动位移差值与荷载幅值的关系曲线
Figure 9. Relationship between dynamic displacement difference and load amplitude
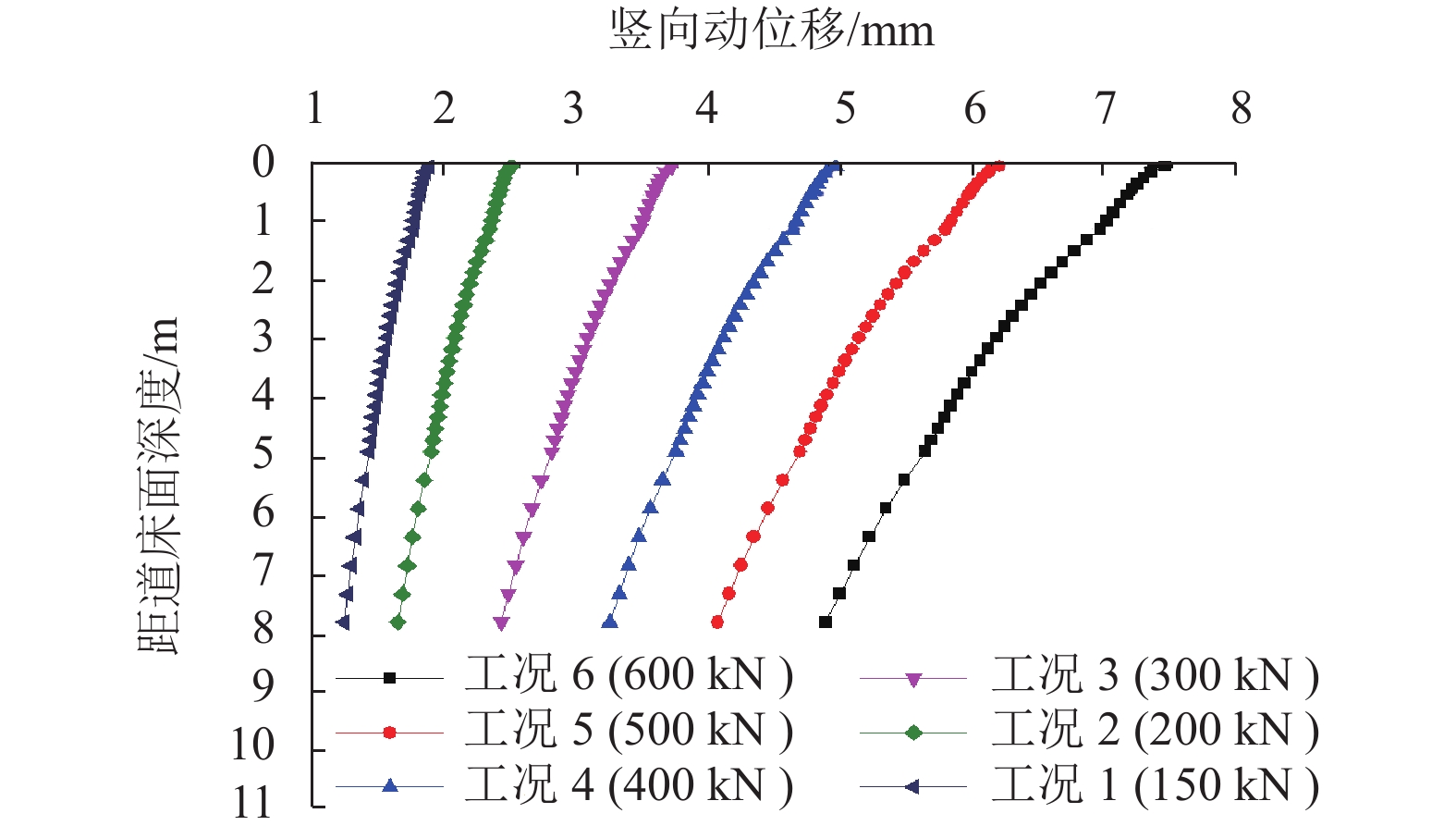
图 10 不同荷载工况下竖向动位移沿深度的分布
Figure 10. Distribution of dynamic displacement along depth under different load conditions
表 1 不同荷载工况下路基的动位移峰值
Table 1. Peak dynamic displacements of subgrade under different load conditions
mm 结构层 150 kN 200 kN 300 kN 400 kN 500 kN 600 kN 道床表层 1.9238 2.5702 3.8182 5.0829 6.3527 7.6513 基床表层 1.8613 2.4838 3.6894 4.9132 6.1418 7.3952 基床底层 1.8193 2.4280 3.6074 4.8030 6.0048 7.2288 路基本体 1.6660 2.2179 3.2957 4.3921 5.4917 6.6061  下载: 导出CSV
下载: 导出CSV
-
国家发展改革委. 铁路“十三五”发展规划发布——铁路发展蓝图绘就[J]. 隧道建设(中英文),2017,37(12): 1584. 刘放, 张永久, 张强, 等. 战略导弹陆基多样式发射方式研究[J]. 飞航导弹, 2019(10): 61-65 周媛. 战略导弹铁路机动发射系统的回顾与展望[J]. 中国航天,2014(11): 42-45. 周晓和,马大为,任杰,等. 某导弹无依托发射场坪动态响应与破坏形态研究[J]. 兵器材料科学与工程,2014,37(2): 77-81.ZHOU Xiaohe, MA Dawei, REN Jie, et al. Dynamic response and failure mode of a missile unsupported random launching site[J]. Ordnance Material Science and Engineering, 2014, 37(2): 77-81. MEI H, LENG W, NIE R, et al. Experimental research on the dynamic response characteristics of the transition subgrade induced by heavy-haul train passage[J]. Proceedings of the Institution of Mechanical Engineers, 2019, 233(9): 974-987. doi: 10.1177/0954409718822924 肖世伟,雷长顺. 重载铁路路基荷载特征和路基动力响应分析[J]. 铁道工程学报,2014(4): 51-56. doi: 10.3969/j.issn.1006-2106.2014.04.011XIAO Shiwei, LEI Changshun. Loading characteristics and dynamic response analysis of subgrade for heavy haul railway[J]. Journal of Railway Engineering Society, 2014(4): 51-56. doi: 10.3969/j.issn.1006-2106.2014.04.011 肖军华,郭鹏飞,周顺华,等. 既有铁路开行大轴重列车路基的动力稳定性[J]. 同济大学学报(自然科学版),2016,44(6): 884-891.XIAO Junhua, GUO Pengfei, ZHOU Shunhua. Dynamic stability of existing railway subgrade under the effect of heavy axle load trains[J]. Journal of Tongji University (Natural Science), 2016, 44(6): 884-891. 杨新文,龙天航,周顺华. 重载铁路轨道-路基系统动位移空间分布特征[J]. 同济大学学报(自然科学版),2016,44(11): 1709-1715.YANG Xinwen, LONG Tianhang, ZHOU Shunhua. Spatial distribution characteristics of displacement of heavy haul railway ballasted track-subgrade system under 30 t axle freight vehicle running[J]. Journal of Tongji University (Natural Science), 2016, 44(11): 1709-1715. GE B, WANG L, LI D. Dynamic characteristic of subgrade in da-qin heavy haul railway[J]. Revista Tecnica de la Facultad de Ingenieria Universidad del Zulia, 2016, 39(6): 146-151. SANTOS N C D, BARBOSA J, CALÇADA R, et al. Track-ground vibrations induced by railway traffic:experimental validation of a 3D numerical model[J]. Soil Dynamics and Earthquake Engineering, 2017, 97: 324-344. doi: 10.1016/j.soildyn.2017.03.004 薛富春,张建民. 移动荷载作用下高速铁路路基动应力的空间分布[J]. 铁道学报,2016,38(1): 86-91. doi: 10.3969/j.issn.1001-8360.2016.01.014XUE Fuchun, ZHANG jianmin. Spatial distribution of dynamic stresses in embankment of high-speed railway under moving loads[J]. Journal of The China Railway Society, 2016, 38(1): 86-91. doi: 10.3969/j.issn.1001-8360.2016.01.014 张瑞国. 400 km/h高速铁路与轴重40 t重载铁路基床结构设计技术探讨[D]. 成都: 西南交通大学, 2017. 邱明明,杨啸,杨果林,等. 云桂高速铁路新型全封闭路堑基床动响应特性研究[J]. 岩土力学,2016,37(2): 537-544.QIU Mingming, YANG Xiao, YANG Guolin, et al. Dynamic response of the new fully-enclosed cuttingsubgrade of Yun−Gui high-speed railway[J]. Rock and Soil Mechanics, 2016, 37(2): 537-544. 杨果林,邱明明,申权,等. 防排水结构层对铁路基床动力响应的影响研究[J]. 中国铁道科学,2016,37(2): 8-16. doi: 10.3969/j.issn.1001-4632.2016.02.02YANG Guolin, QIU Mingming, SHEN Quan, et al. Effect of waterproofing and drainage structure layer on dynamic response of railway subgrade bed[J]. China Railway Science, 2016, 37(2): 8-16. doi: 10.3969/j.issn.1001-4632.2016.02.02 肖军华,周顺华,韦凯. 列车振动荷载下铁路粉土路基的长期沉降[J]. 浙江大学学报(工学版),2010,44(10): 1912-1918.XIAO Junhua, ZHOU Shunhua, WEI Kai. Long term settlement of railroad silt subgrade induced by train loading[J]. Journal of Zhejiang University (Engineering Science), 2010, 44(10): 1912-1918. 朱剑月,练松良. 轨道结构落轴冲击动态响应有限元分析[J]. 铁道学报,2005,27(3): 76-79. doi: 10.3321/j.issn:1001-8360.2005.03.014ZHU Jianyue, LIAN Songliang. Railway track structuredynamic response under wheel load drop by use of FEM[J]. Journal of the China Railway Society, 2005, 27(3): 76-79. doi: 10.3321/j.issn:1001-8360.2005.03.014 王忆佳,曾京,高浩,等. 车轮扁疤引起的轮轨冲击分析[J]. 西南交通大学学报,2014,49(4): 700-705. doi: 10.3969/j.issn.0258-2724.2014.04.022WANG Yijia, ZENG Jing, GAO Hao, et al. Analysis of wheel/rail impact induced by wheel flats[J]. Journal of Southwest Jiaotong University, 2014, 49(4): 700-705. doi: 10.3969/j.issn.0258-2724.2014.04.022 翟婉明. 铁路轮轨冲击振动模拟与试验[J]. 计算力学学报,1999,16(1): 93-99. doi: 10.3969/j.issn.1007-4708.1999.01.014ZHAI Wanming. Simulation and experiment of railway wheel/rail impact vibrations[J]. Chinese Journal of Computational Mechanics, 1999, 16(1): 93-99. doi: 10.3969/j.issn.1007-4708.1999.01.014 张震东,马大为,胡建国,等. 弹射冲击载荷作用下沥青混凝土路面面层的损伤[J]. 工程力学,2015,32(10): 161-168. doi: 10.6052/j.issn.1000-4750.2014.02.0111ZHANG Zhendong, MA Dawei, HU Jianguo, et al. Damage of surface layer of asphalt concrete pavement under launching impact load[J]. Engineering Mechanics, 2015, 32(10): 161-168. doi: 10.6052/j.issn.1000-4750.2014.02.0111 袁成林. 强冲击作用下发射场坪动力响应研究[D]. 南京: 南京理工大学, 2018. 陈云敏,边学成. 高速铁路路基动力学研究进展[J]. 土木工程学报,2018,51(6): 1-13.CHEN Yunmin, BIAN Xuecheng. The review of high-speed railway track foundation dynamics[J]. China Civil Engineering Journal, 2018, 51(6): 1-13. 国家铁路局. 重载铁路设计规范: TB 10625—2017[S]. 北京: 中国铁道出版社, 2017. 刘晶波,杜义欣,闫秋实. 粘弹性人工边界及地震动输入在通用有限元软件中的实现[J]. 防灾减灾工程学报,2007,27(增刊): 37-42.LIU Jingbo, DU Yixin, YAN Qiushi. Application of viso-elastic artificial boundaries and seismic input in general finite element software[J]. Journal of Disaster Prevention and Mitigation Engineering, 2007, 27(S): 37-42. 刘晶波,谷音,杜义欣. 一致粘弹性人工边界及粘弹性边界单元[J]. 岩土工程学报,2006,28(9): 1070-1075. doi: 10.3321/j.issn:1000-4548.2006.09.004LIU Jingbo, GU Yin, DU Yixin. Consistent viscous-spring artificial boundaries and viscous-spring boundary element[J]. Chinese Journal of Geotechnical Engineering, 2006, 28(9): 1070-1075. doi: 10.3321/j.issn:1000-4548.2006.09.004 杨邦强. 特种荷载作用下铁路轨道路基试验研究[D]. 成都: 西南交通大学, 2017. 易思蓉, 何华武. 铁道工程[M]. 3版. 北京: 中国铁道出版社, 2015: 246-248. 吕文强,罗强,刘钢,等. 重载铁路路基基床结构分析及设计方法[J]. 铁道学报,2016,38(4): 74-81. doi: 10.3969/j.issn.1001-8360.2016.04.011LYV Wenqiang, LUO Qiang, LIU Gang, et al. Structural analysis and design method for subgrade bed of heavy haul railway[J]. Journal of the China Railway Society, 2016, 38(4): 74-81. doi: 10.3969/j.issn.1001-8360.2016.04.011 -

 下载:
下载:

 点击查看大图
点击查看大图
计量
- 文章访问数: 707
- HTML全文浏览量: 301
- PDF下载量: 23
- 被引次数: 0