摘要:
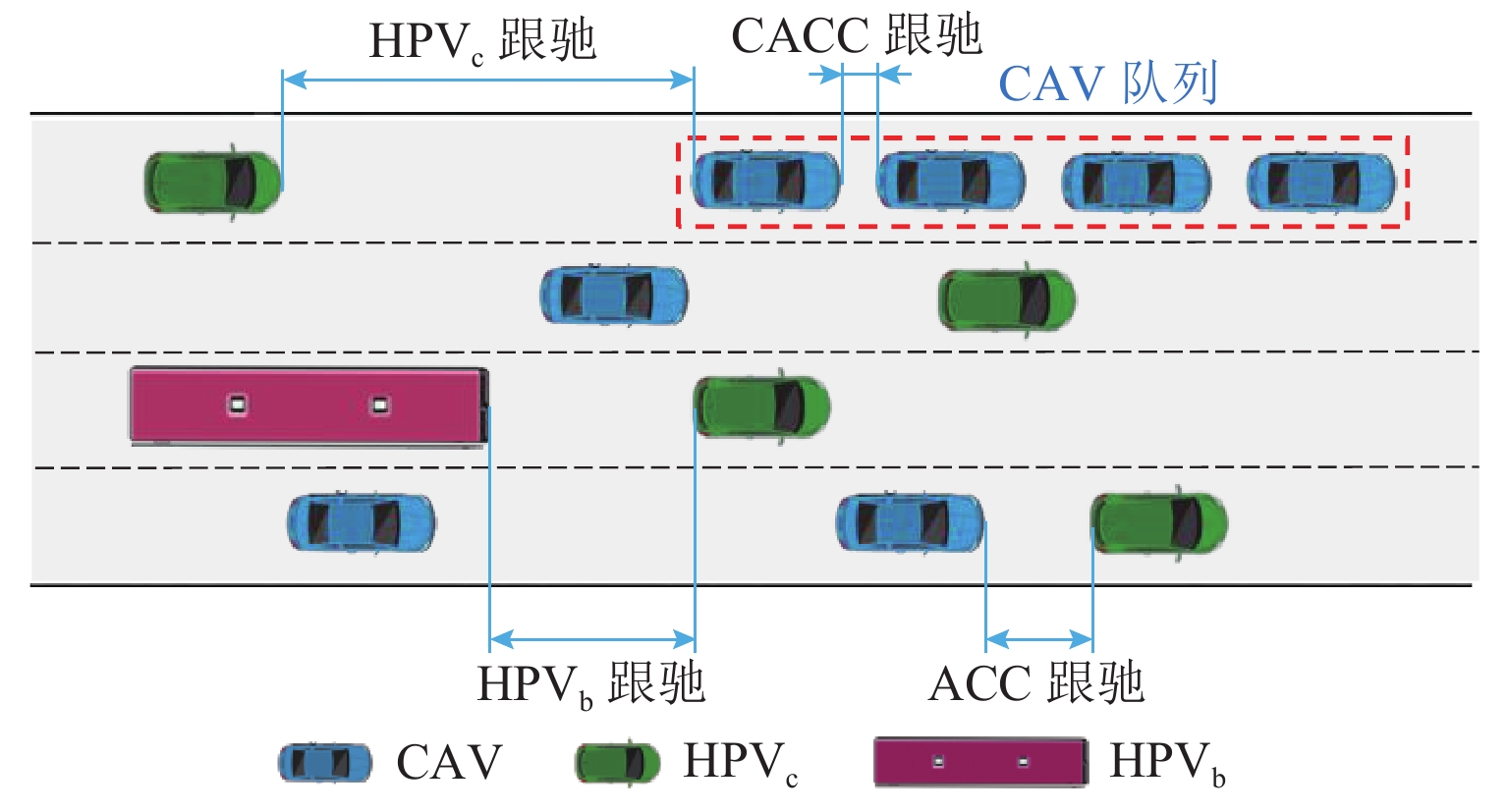
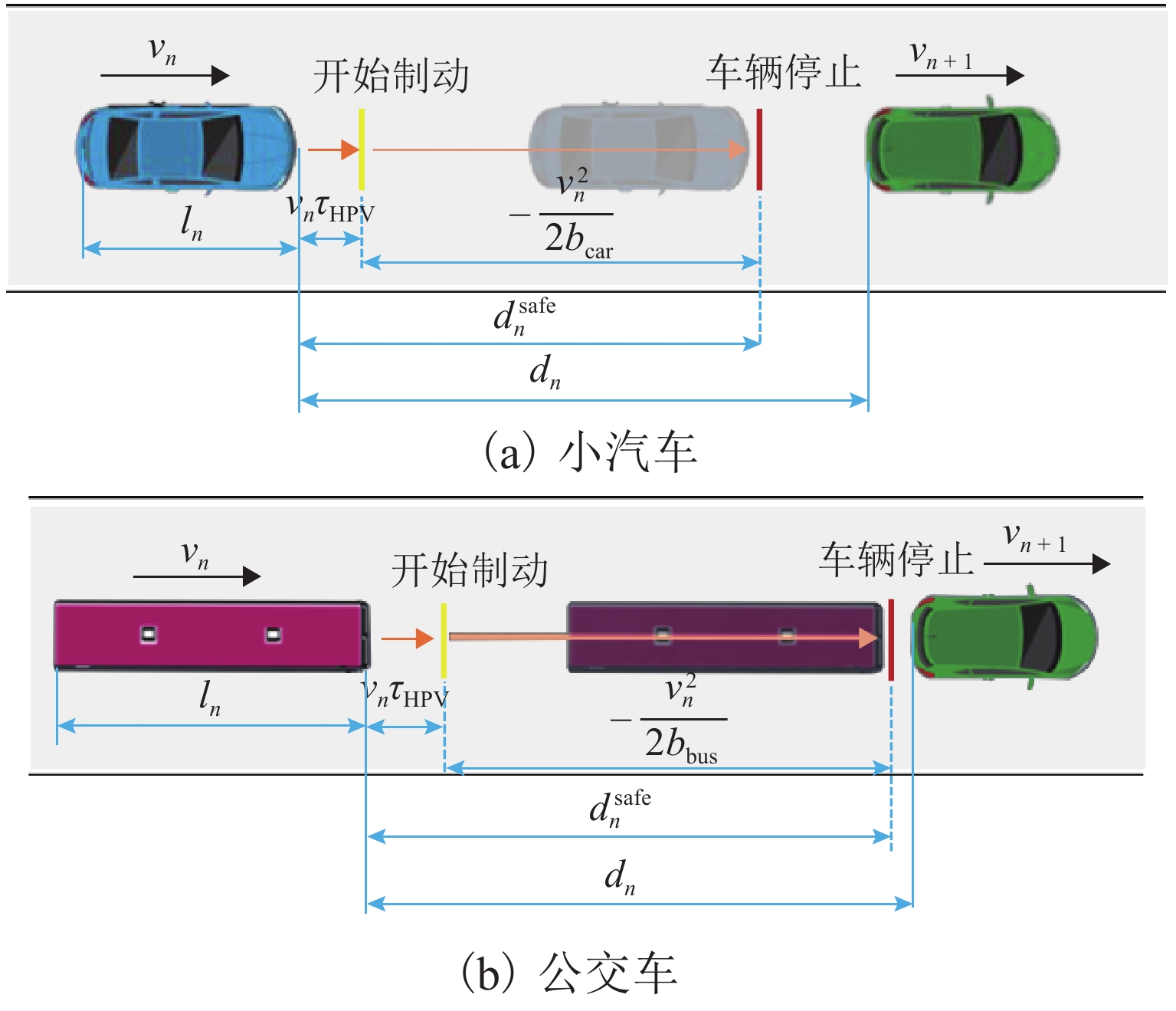
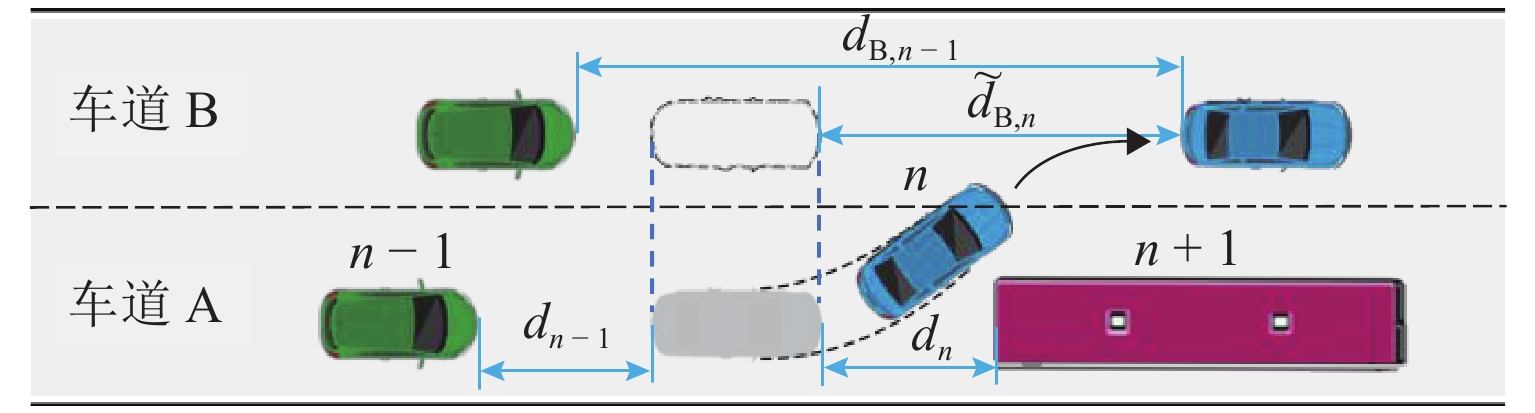
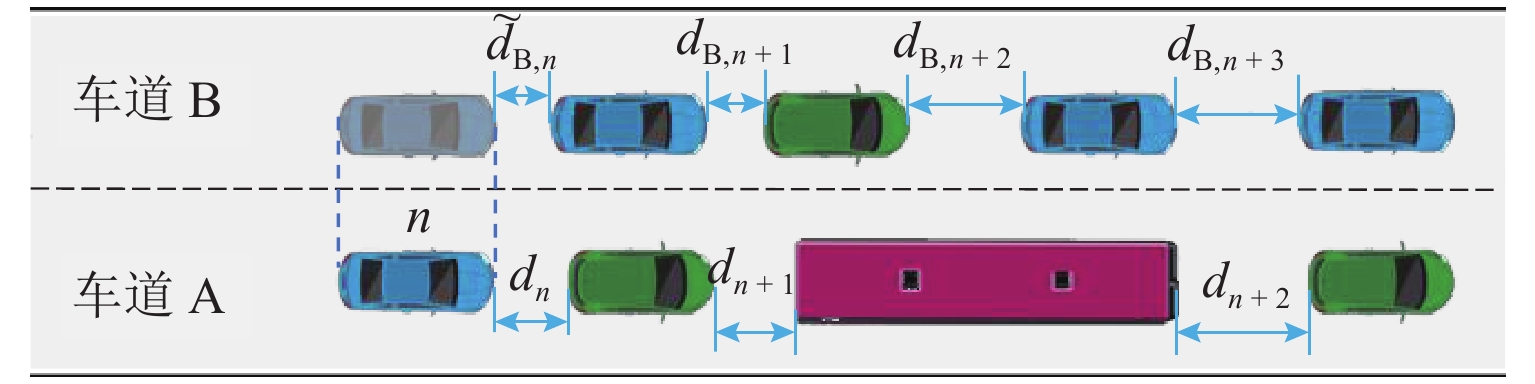
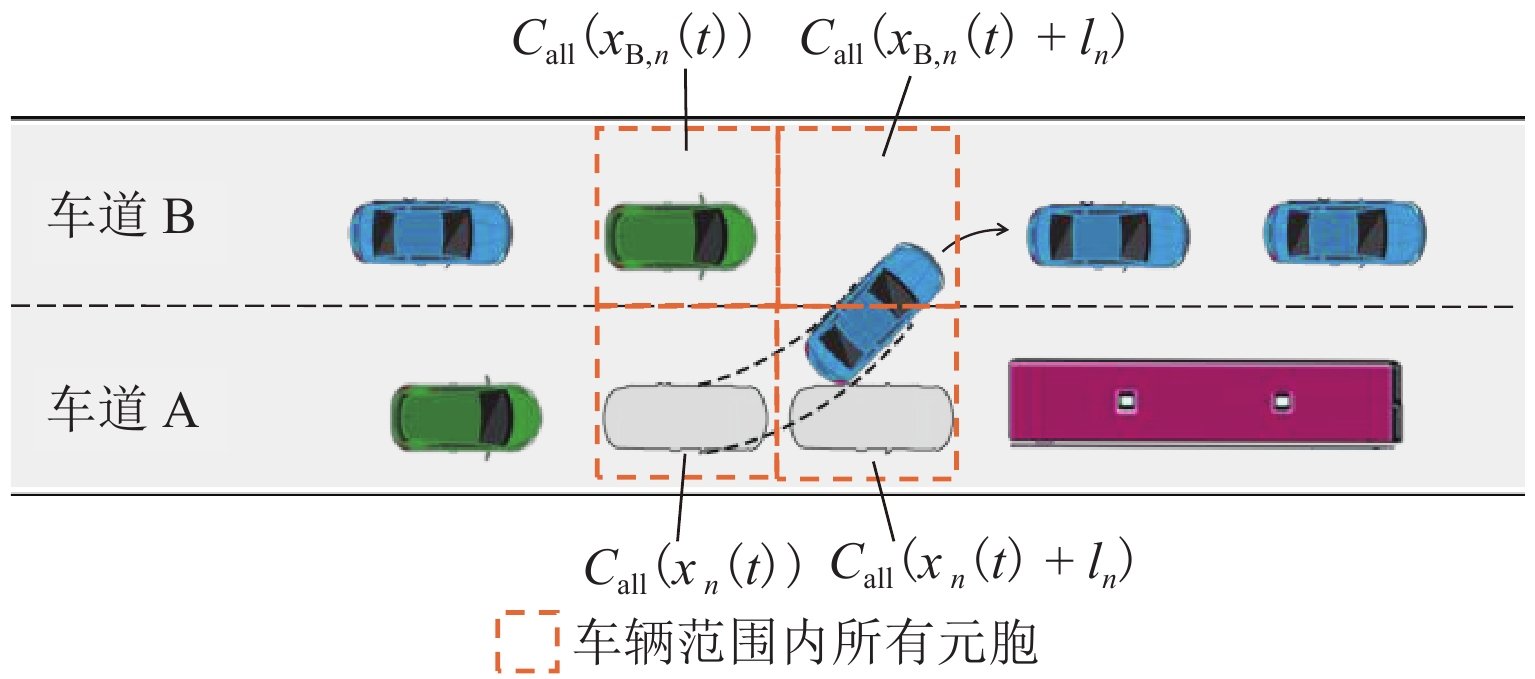
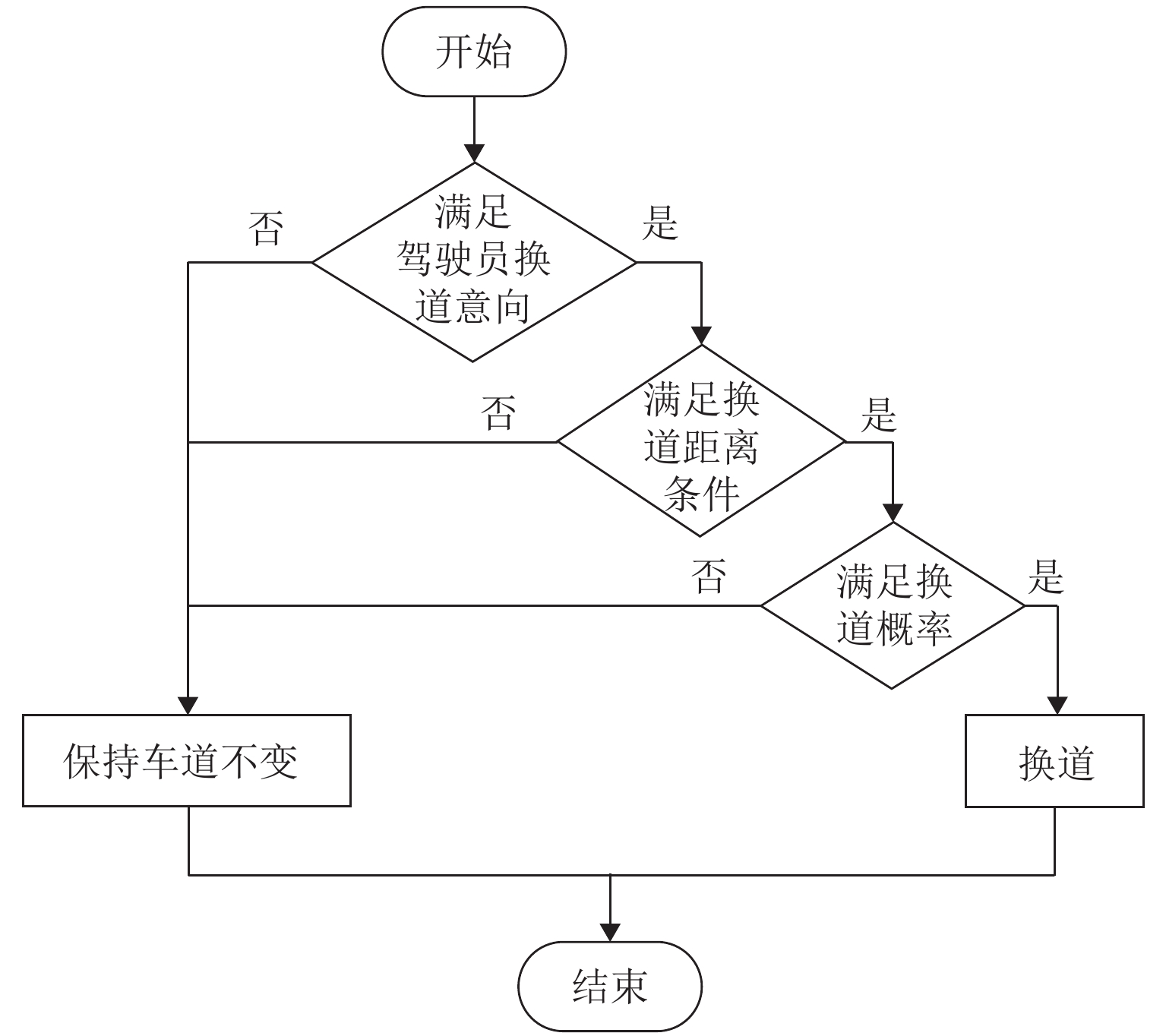
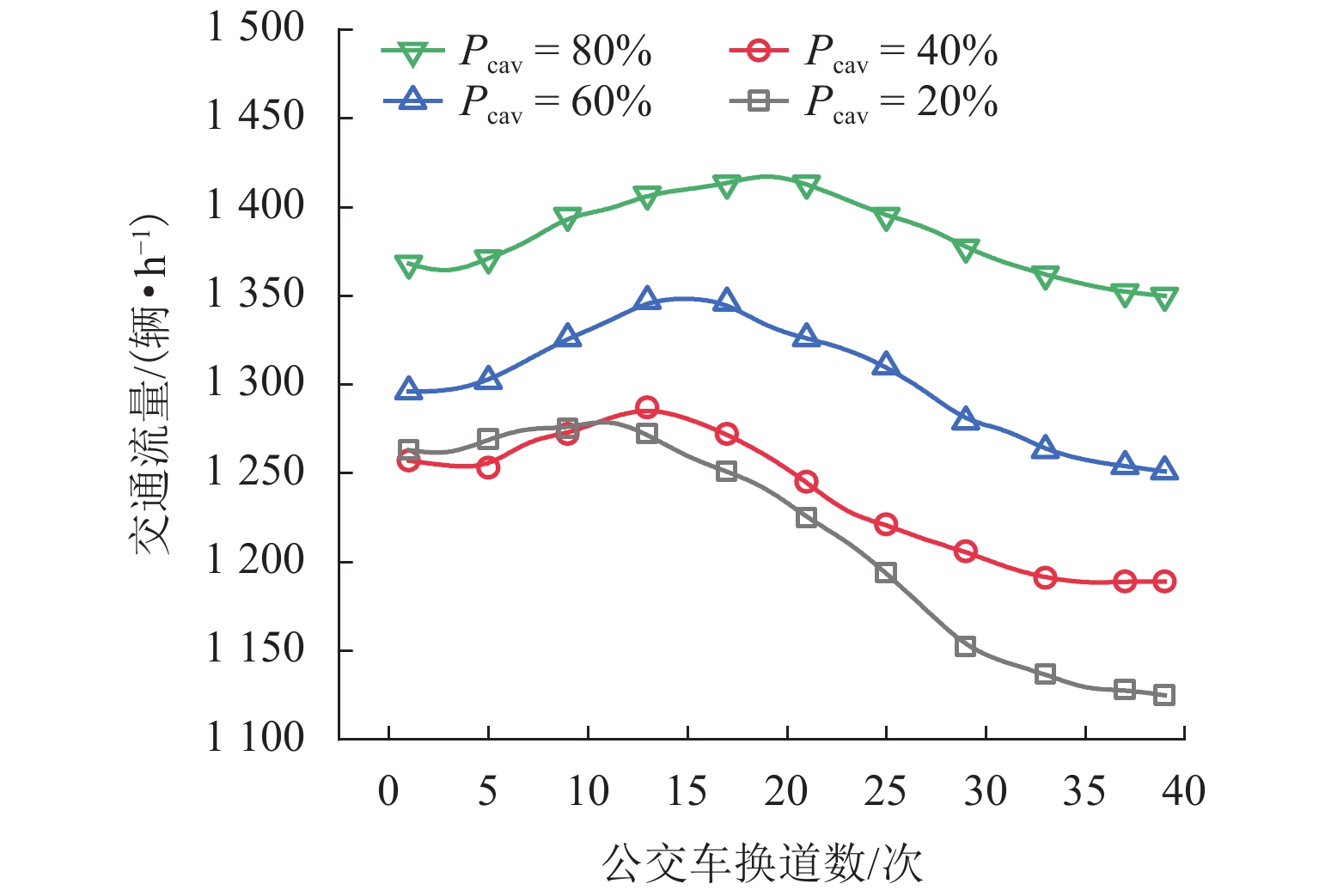
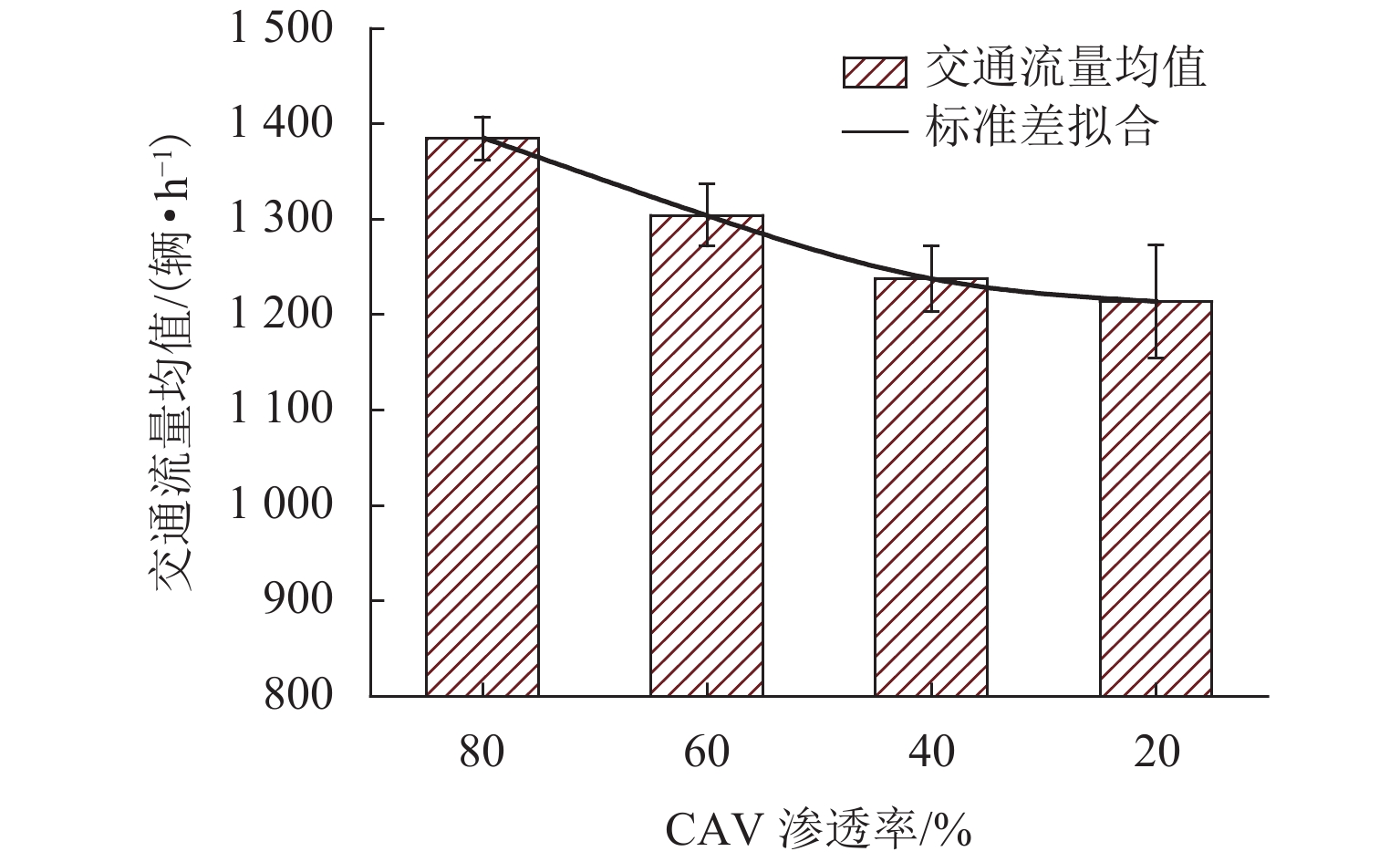
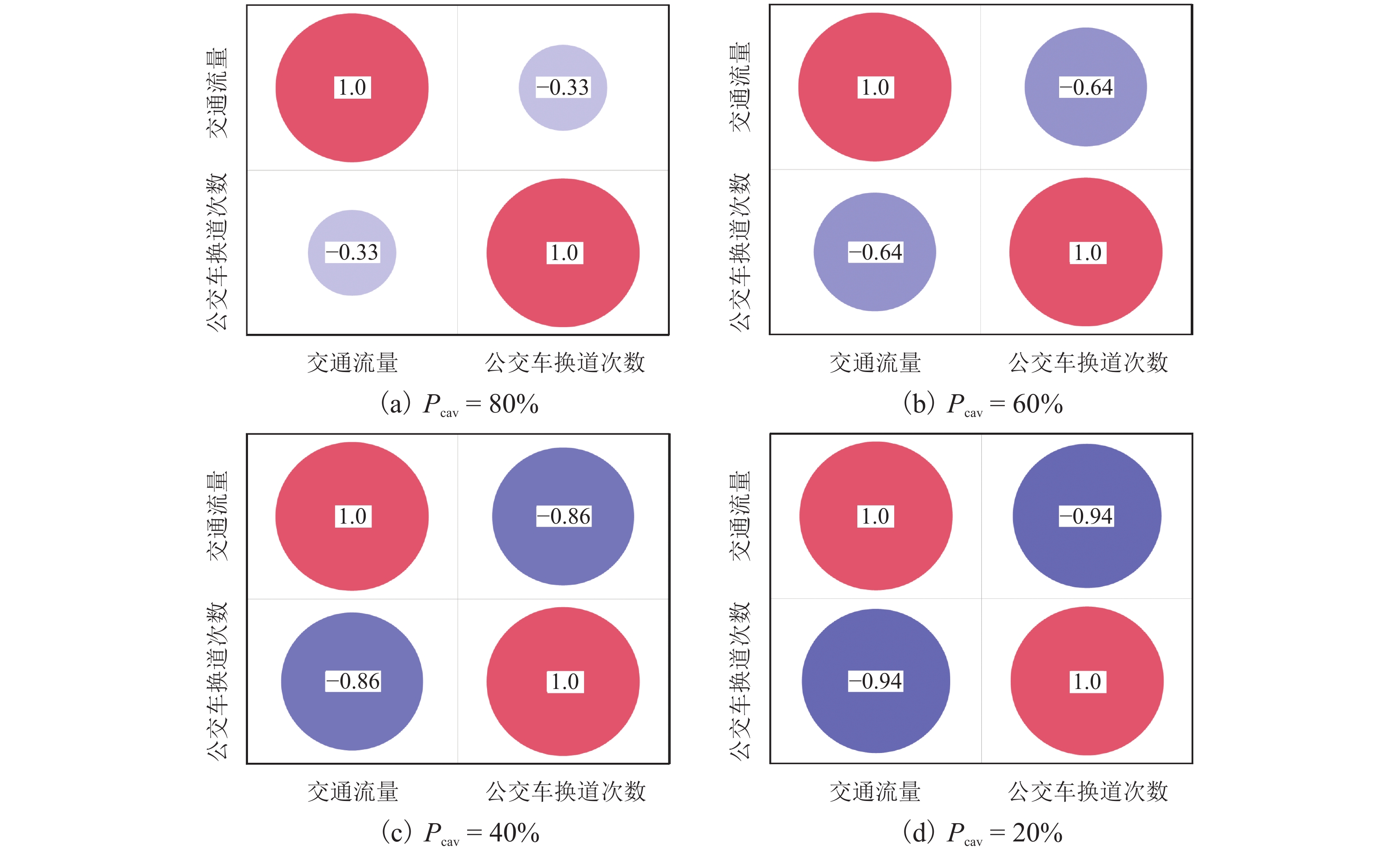
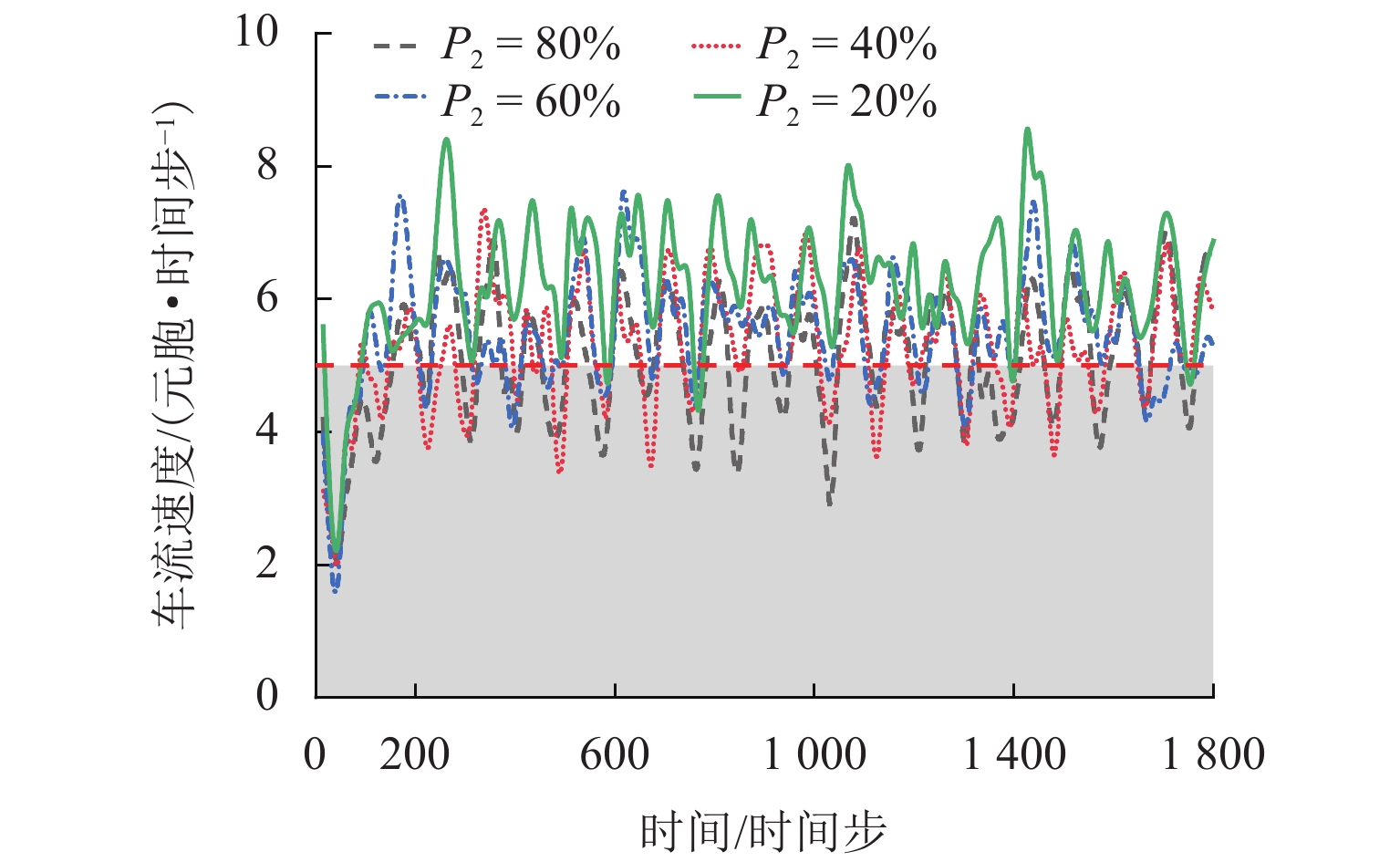
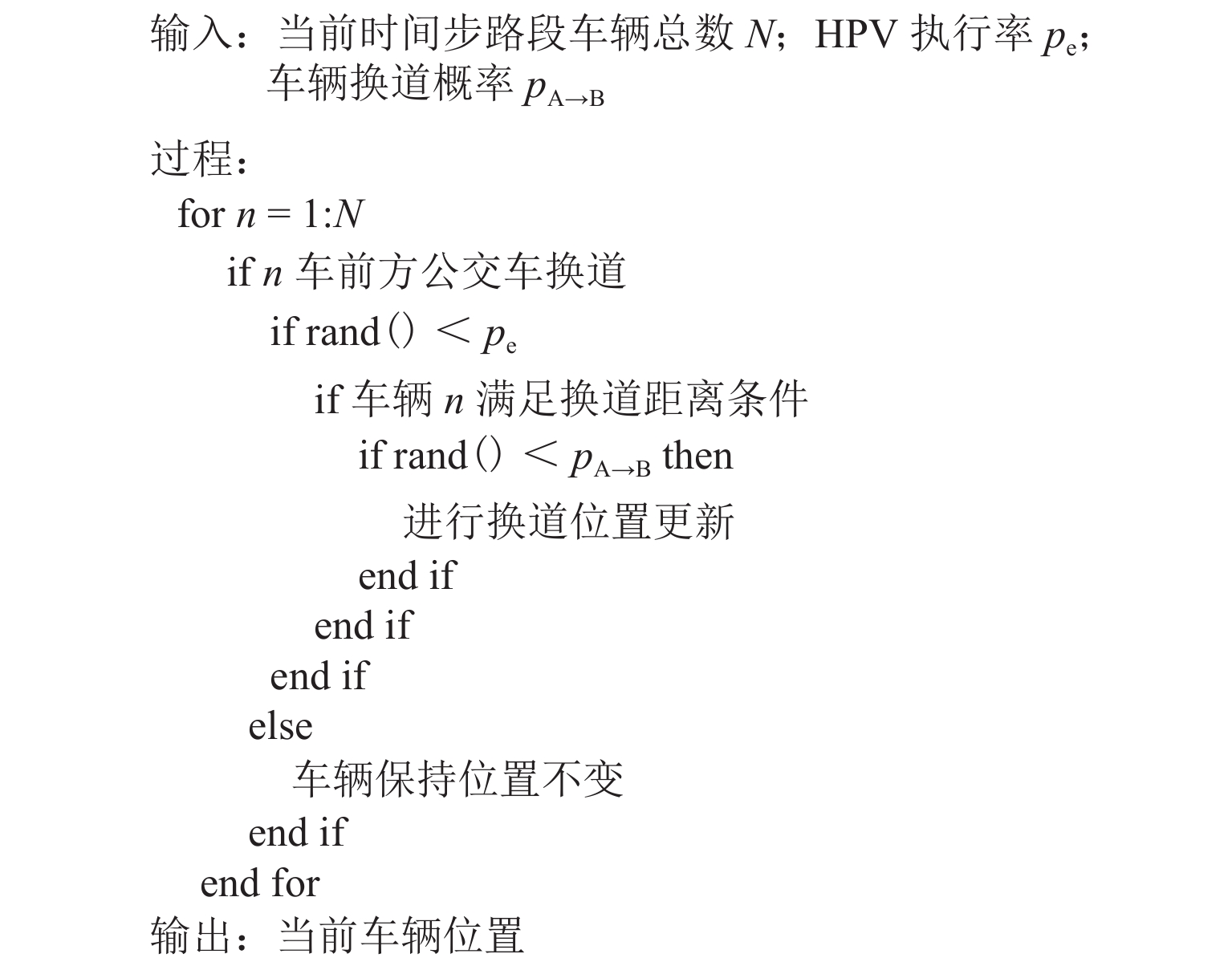
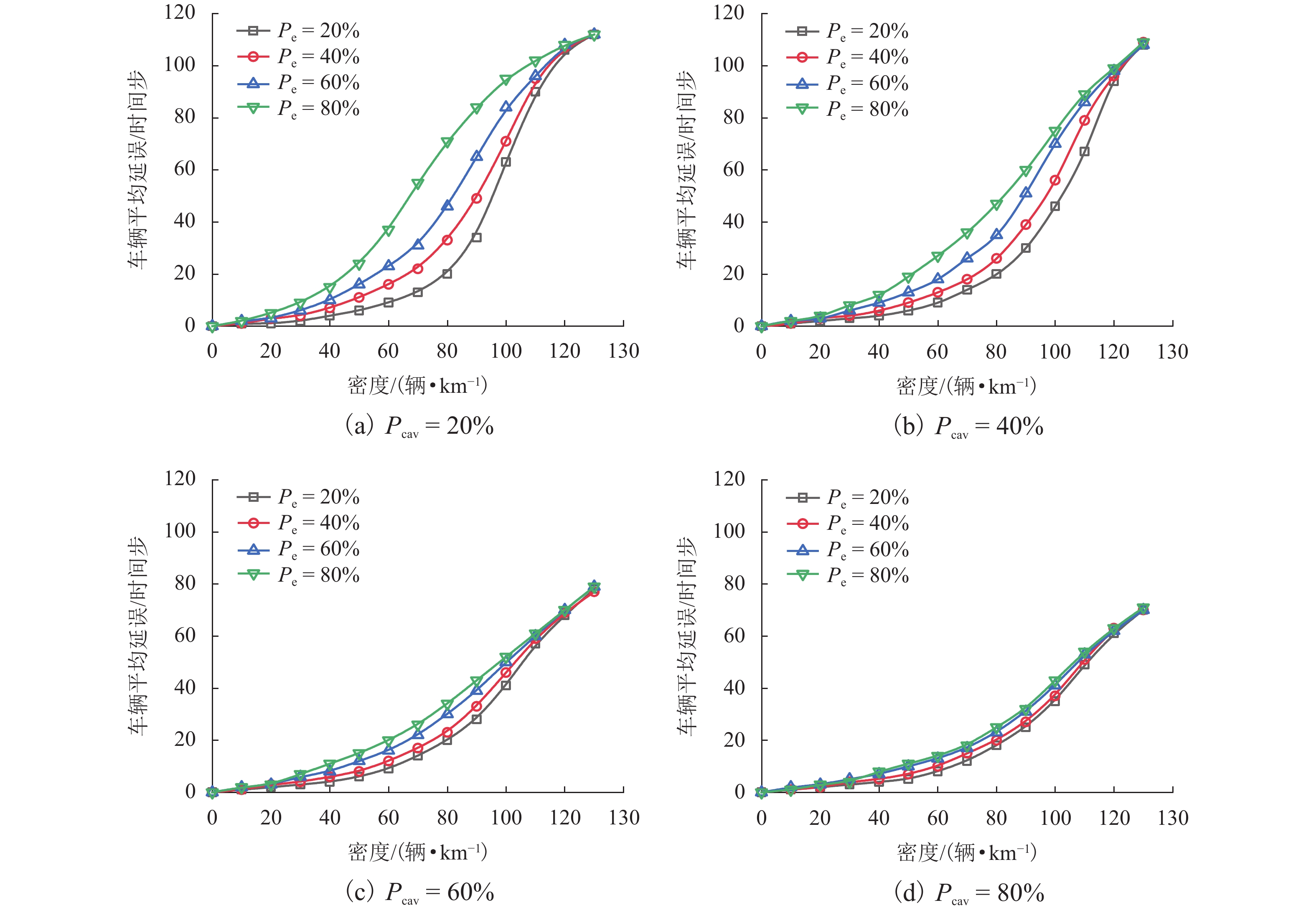
为研究网联自动驾驶车(connected autonomous vehicle, CAV)和人工驾驶车(human-pilot vehicle, HPV)所组成的异质交通流特性及公交车驾驶行为对环境的影响,首先,分析异质交通流中的4种跟驰模式:人工驾驶小汽车跟驰、人工驾驶公交车跟驰、自适应巡航控制(adaptive cruise control, ACC)跟驰和协同自适应巡航控制(cooperative adaptive cruise control, CACC)跟驰;接着,基于各跟驰模型的特点,构建车辆跟驰和换道的元胞自动机模型,综合考虑CAV车队特性、驾驶员与CAV各自反应时间特性以及HPV加塞特性,并利用跟驰模式判断参数融合不同跟驰模式特性,实现统一的模型表达;最后,仿真分析不同CAV渗透率下CAV排队强度及公交车换道行为对交通流的影响. 结果表明:在一定的CAV渗透率下,促使CAV形成队列比单纯提高CAV渗透率更能有效提升道路通行效率;适量的公交换道有助于充分利用道路通行能力,过多的公交换道则会妨碍正常交通,公交换道对交通流造成的通行效率衰减随CAV渗透率的增大而减小;同步流状态下,人工驾驶小汽车执行率与道路通行效率呈负相关关系;而在堵塞流状态下,人工驾驶小汽车执行率对通行效率影响甚微.


 高级检索
高级检索
 Email alert
Email alert RSS
RSS 摘要
摘要 HTML全文
HTML全文 PDF 3962KB
PDF 3962KB 附件
附件 施引文献
施引文献