Objective The permanent magnet electrodynamic suspension (PMEDS) vehicle, with its integrated levitation and propulsion system, shows significant potential for applications in areas such as ultra-high-speed and heavy-load highways, as well as mountainous road transportation. However, the PMEDS vehicle is a lateral underdamped system, and its lateral open-loop system is extremely unstable. It is prone to instability when exposed to disturbances, such as lateral gusts, which seriously affect driving safety. Therefore, it is crucial to study lateral motion control under the conditions of insufficient lateral force, model uncertainty, and time-varying disturbances.
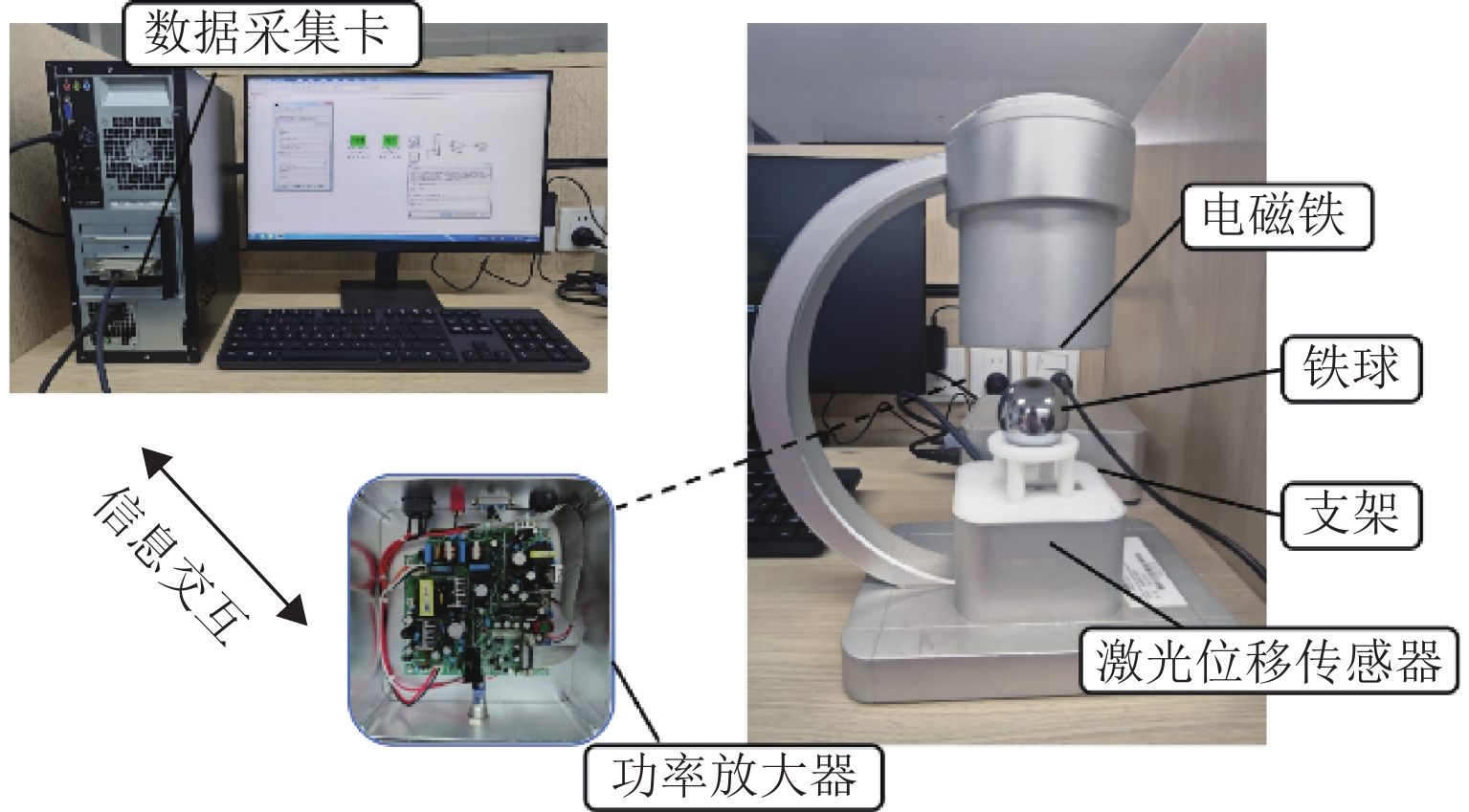
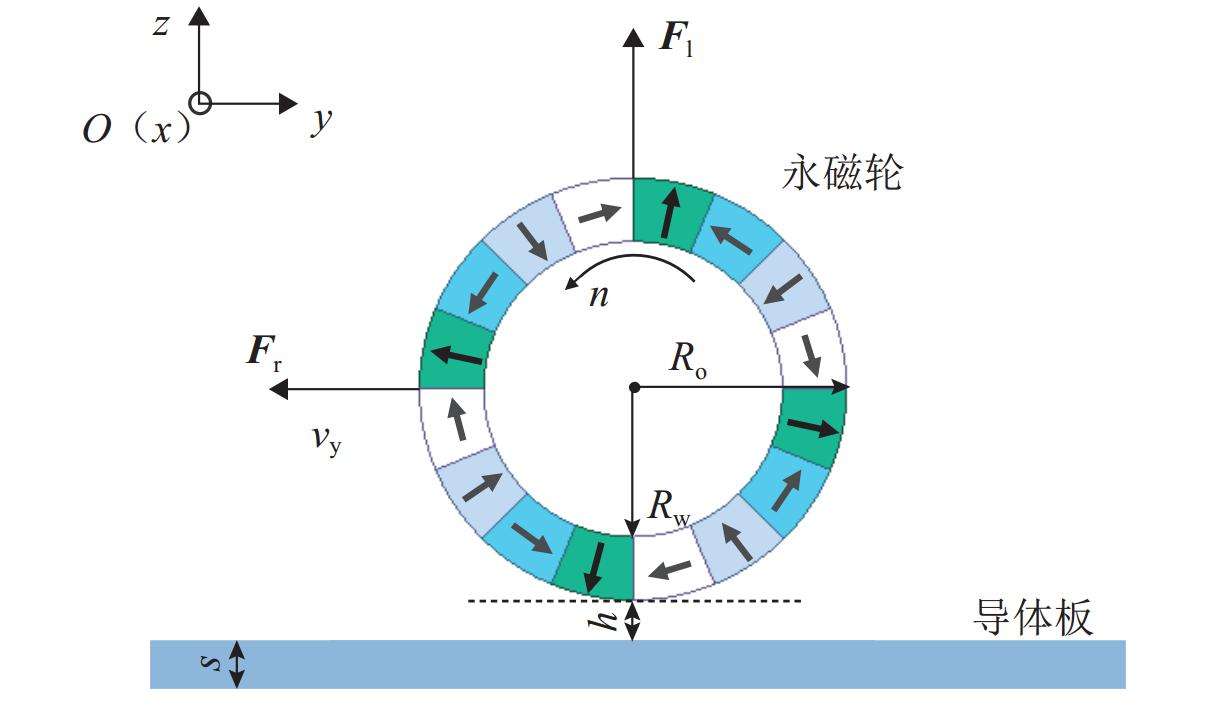
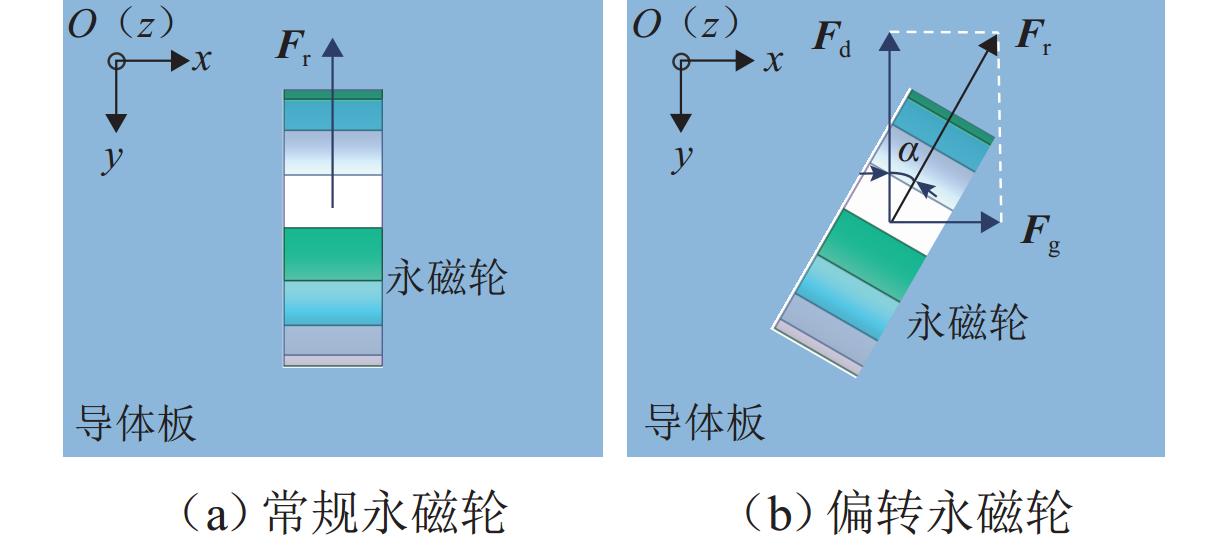
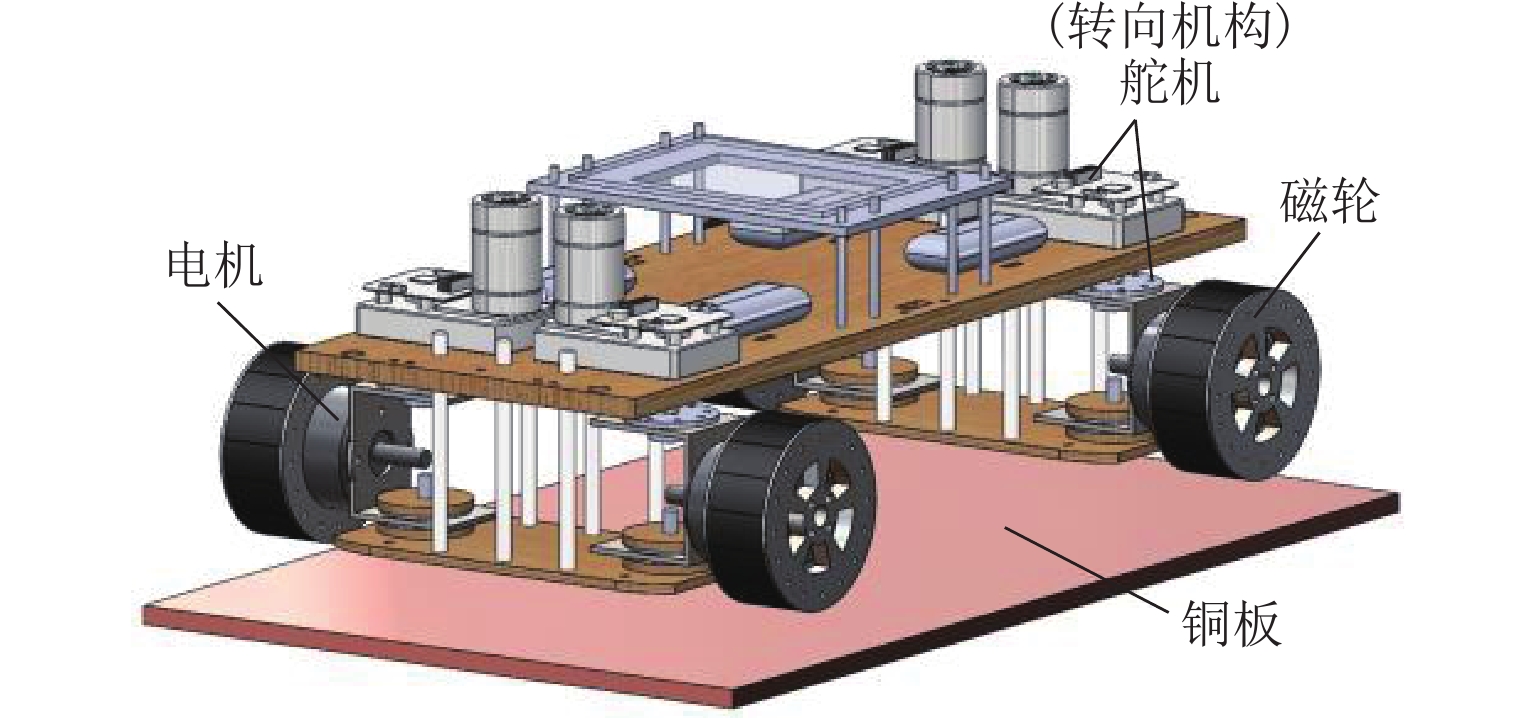
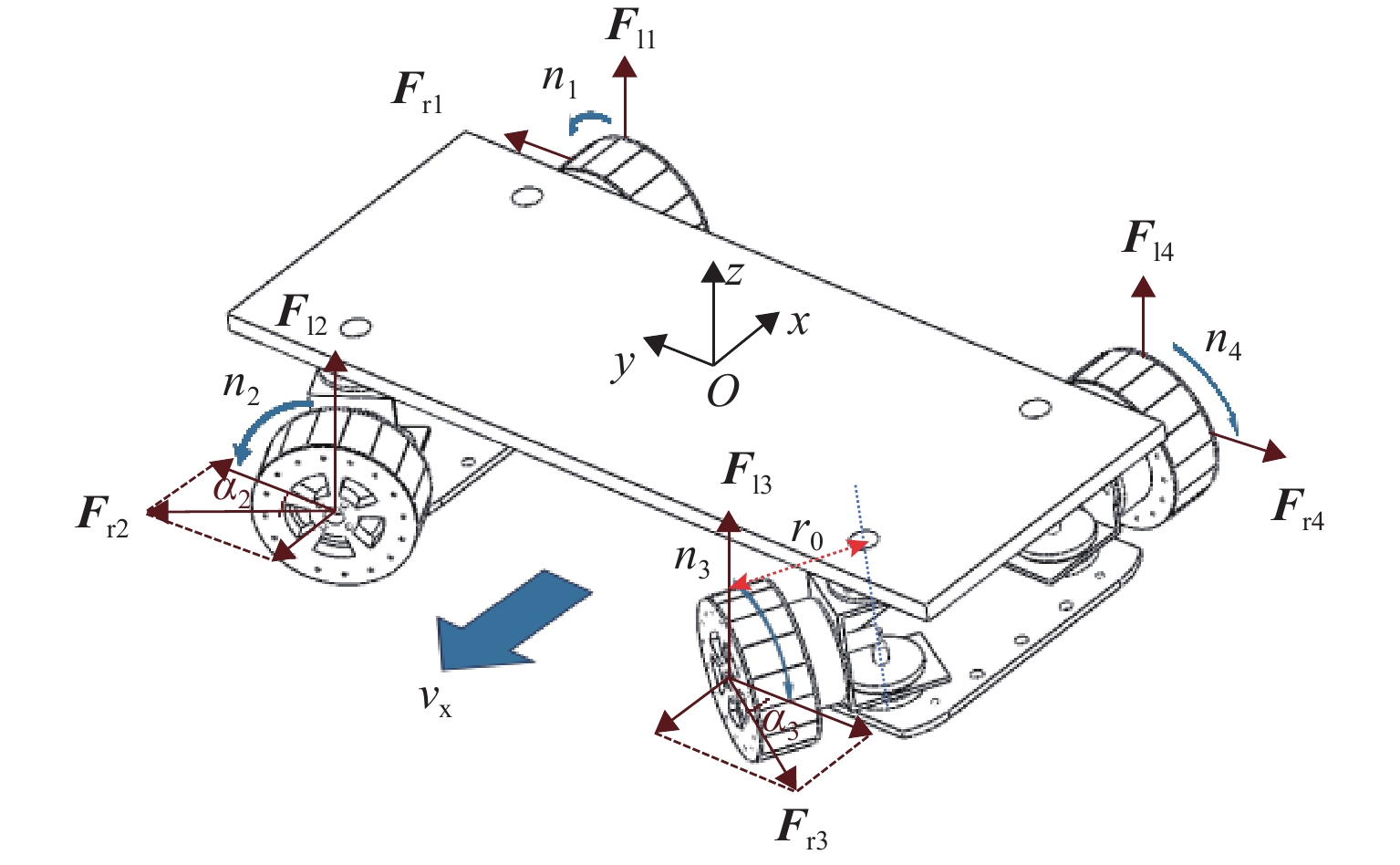
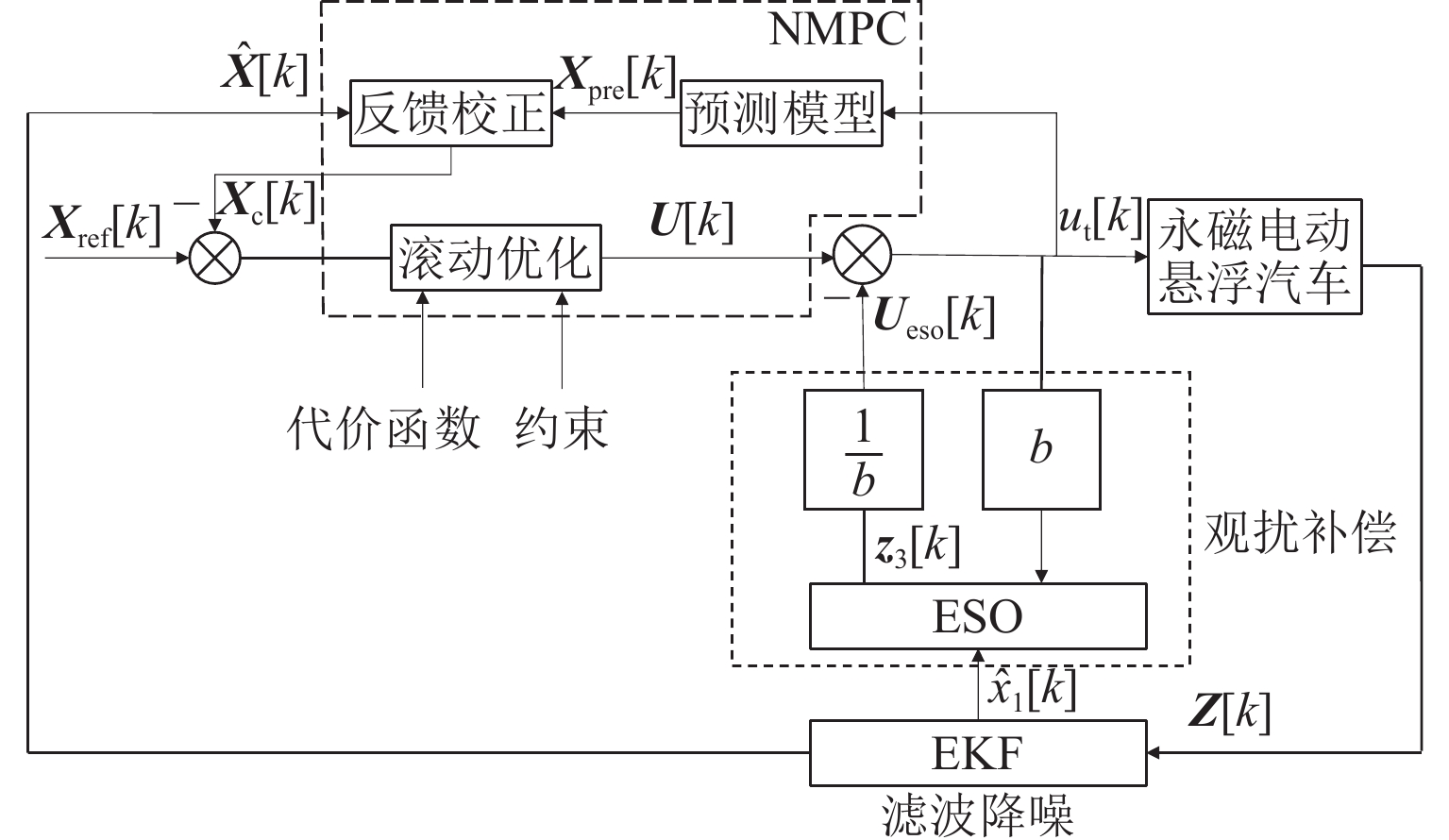
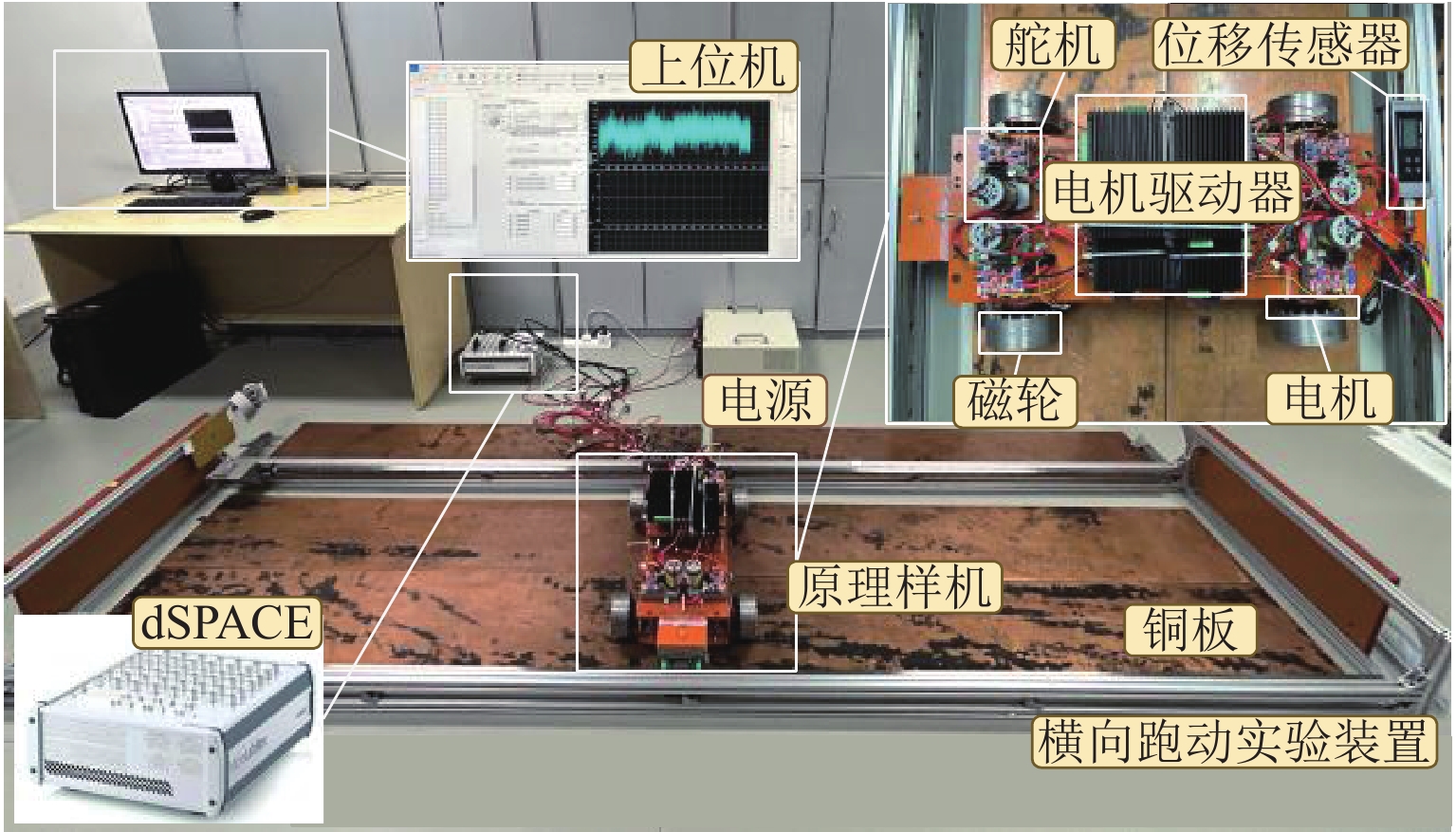
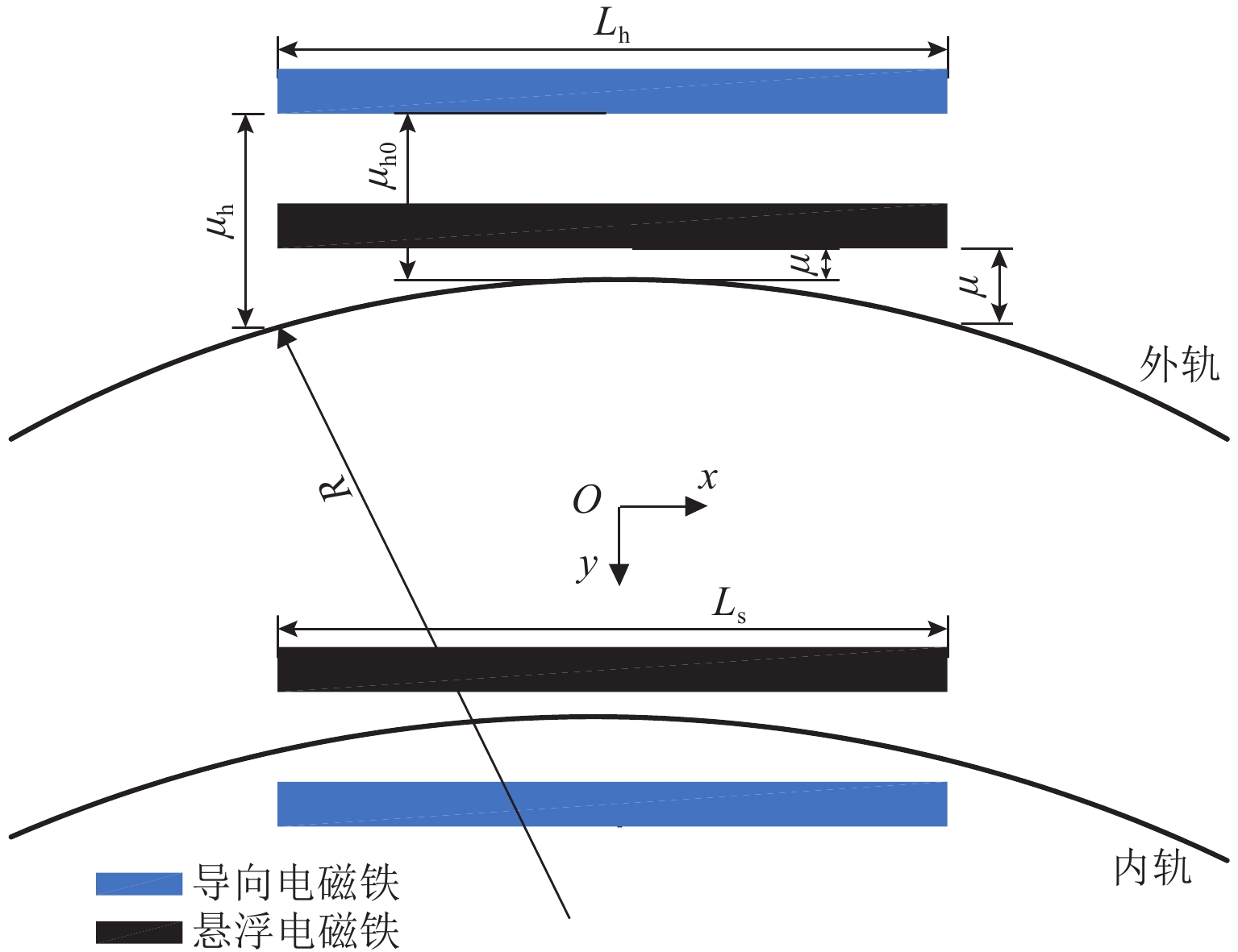
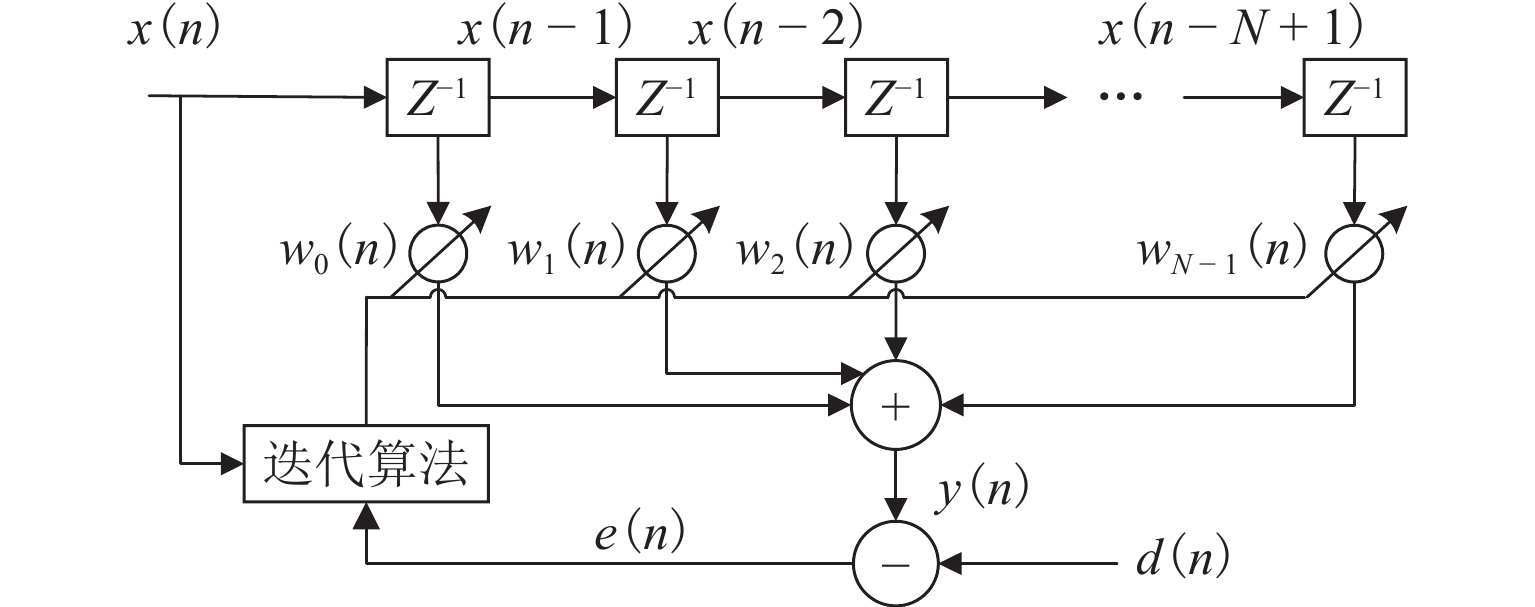
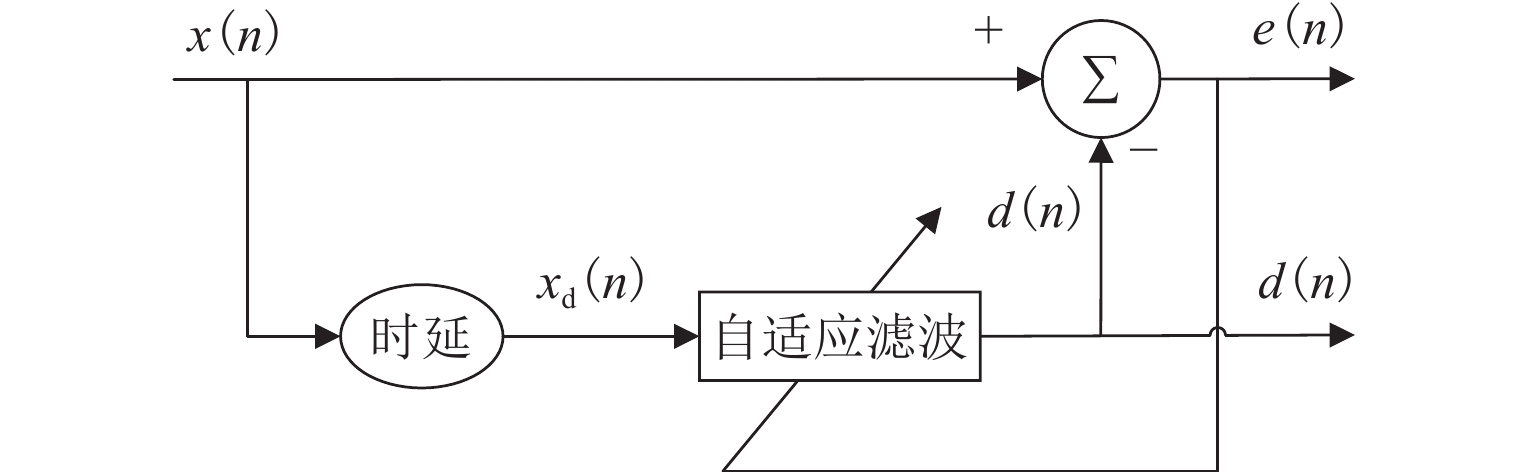
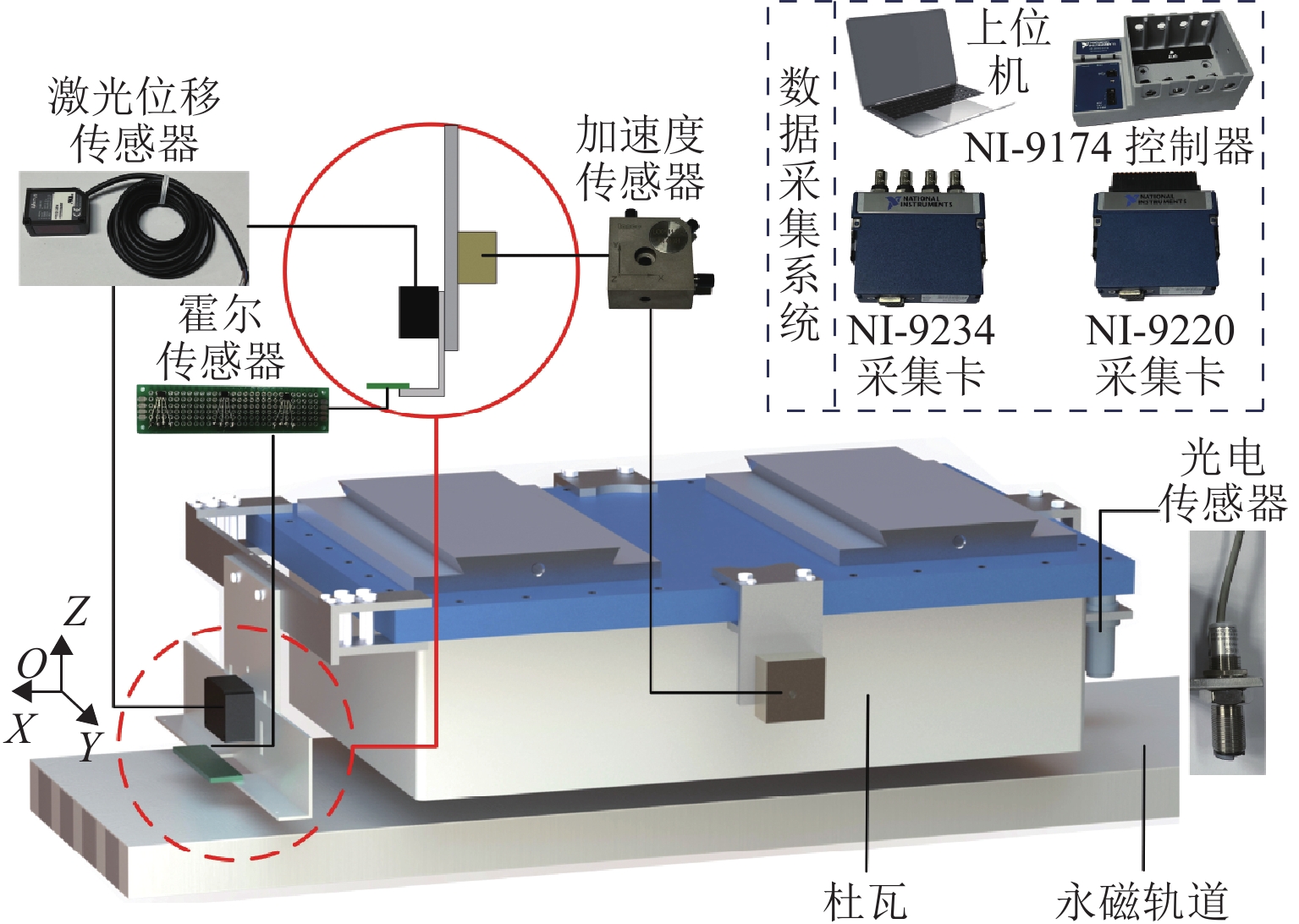
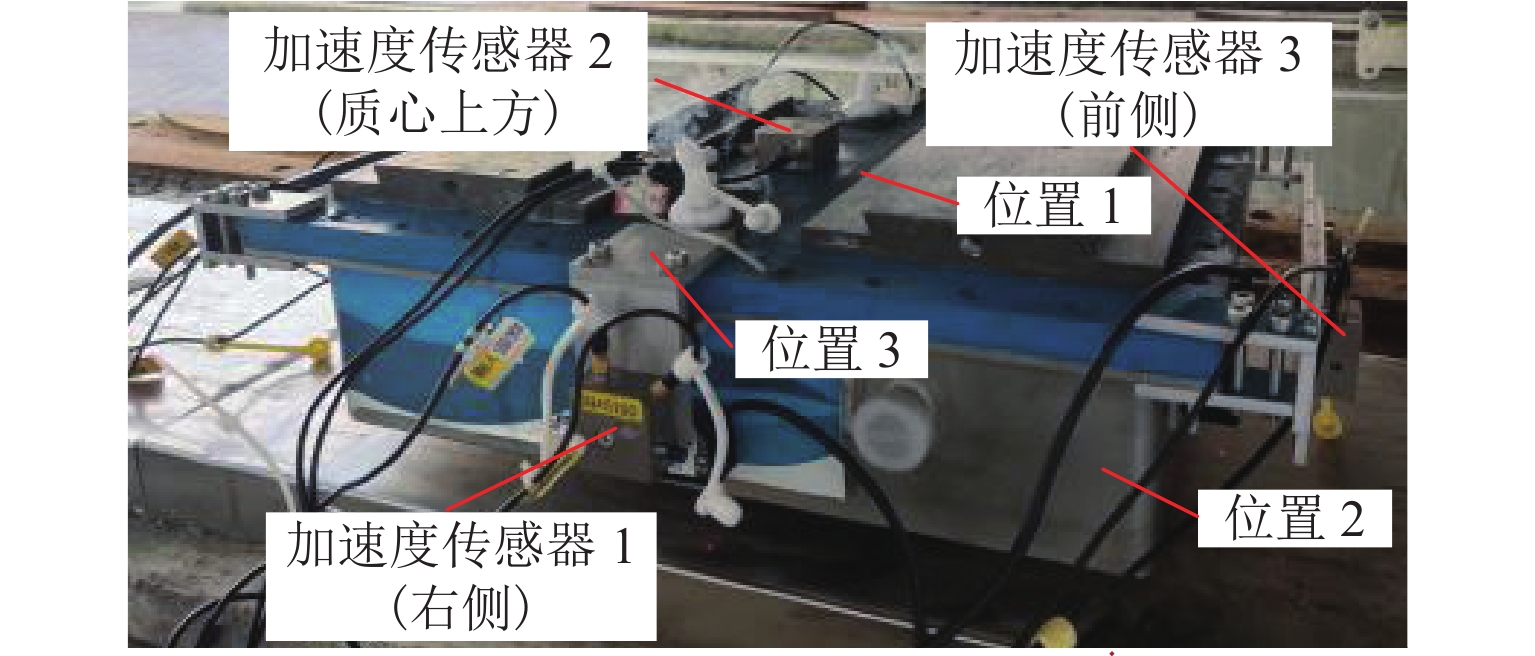
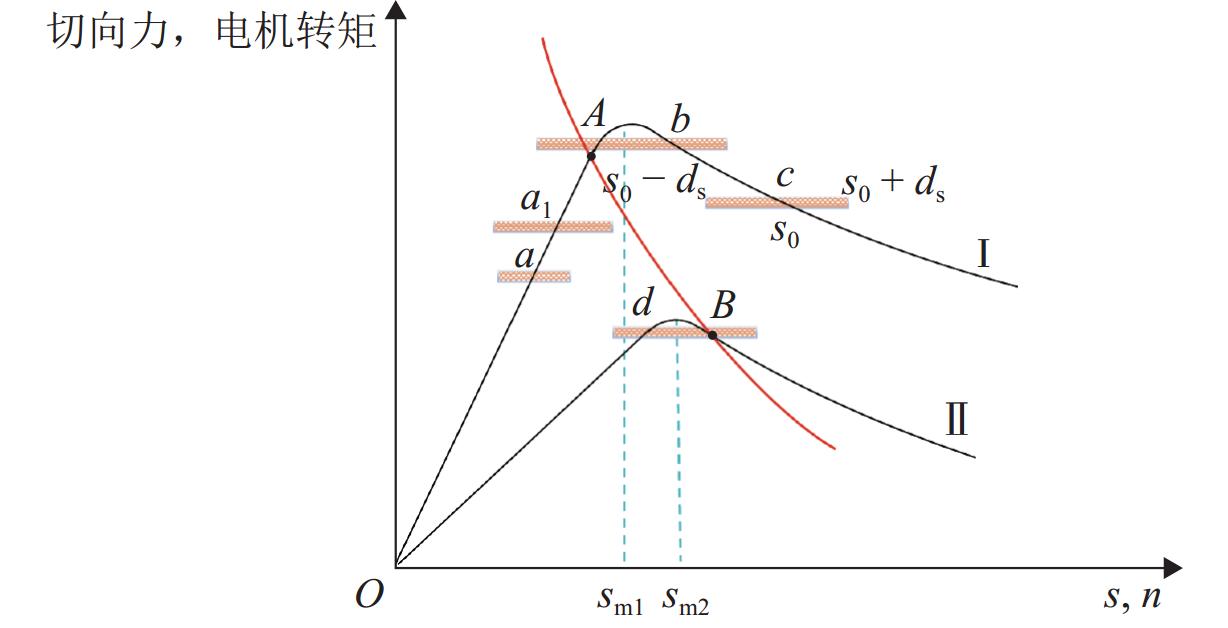
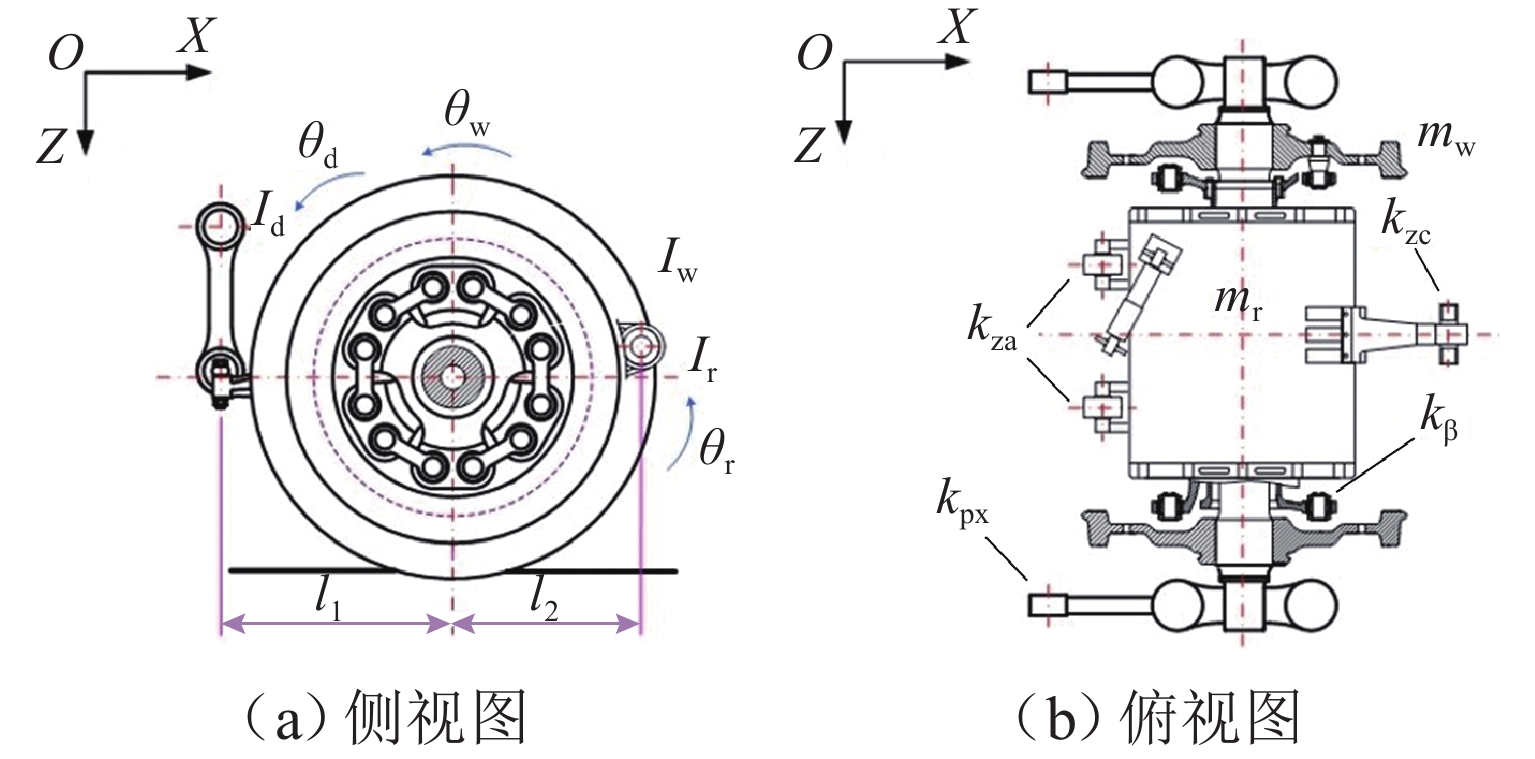
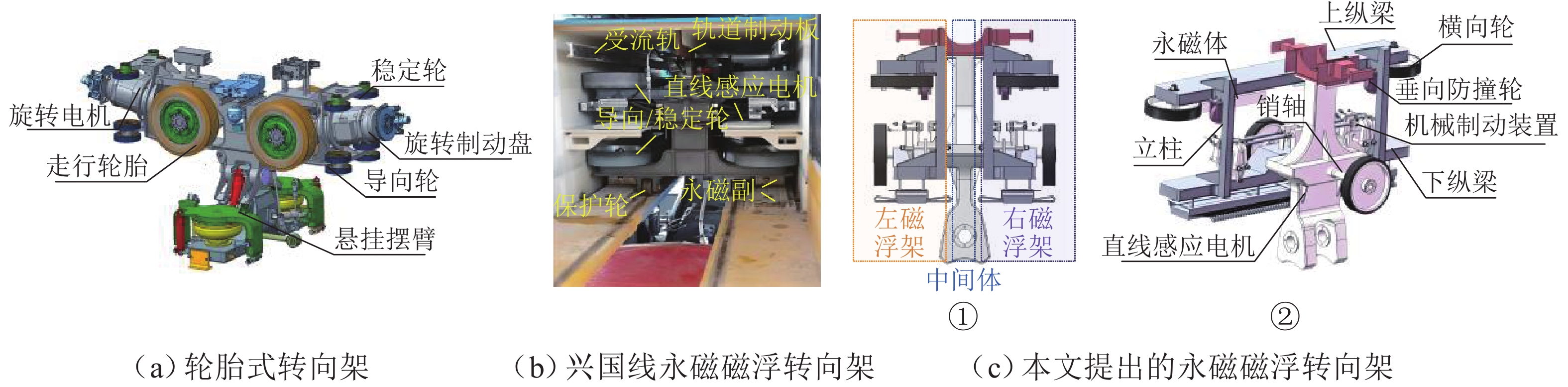
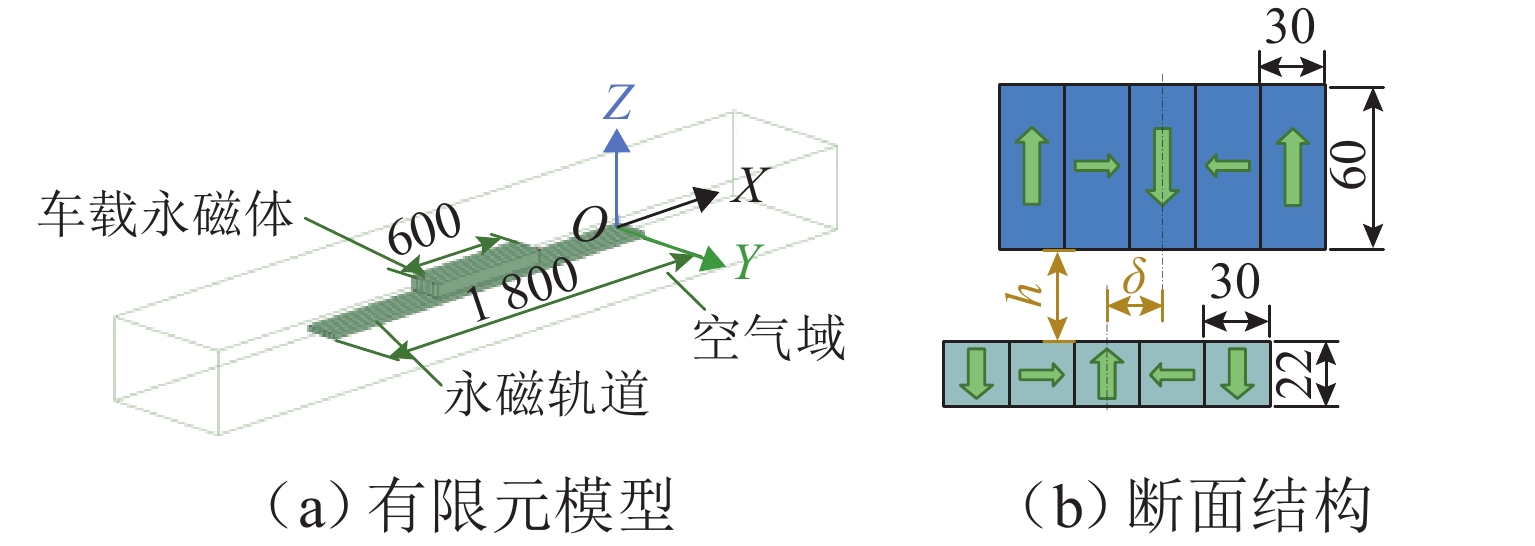
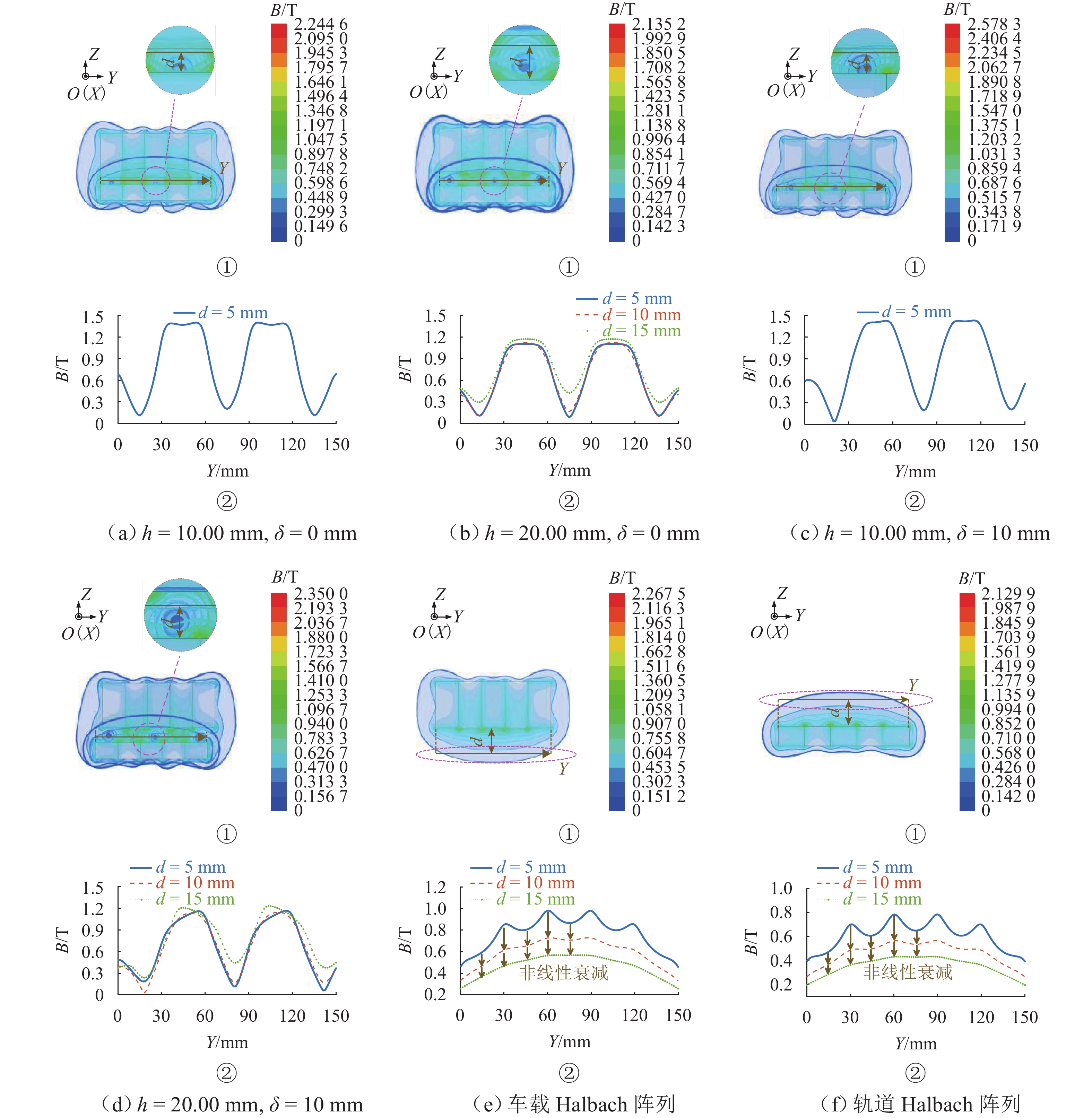
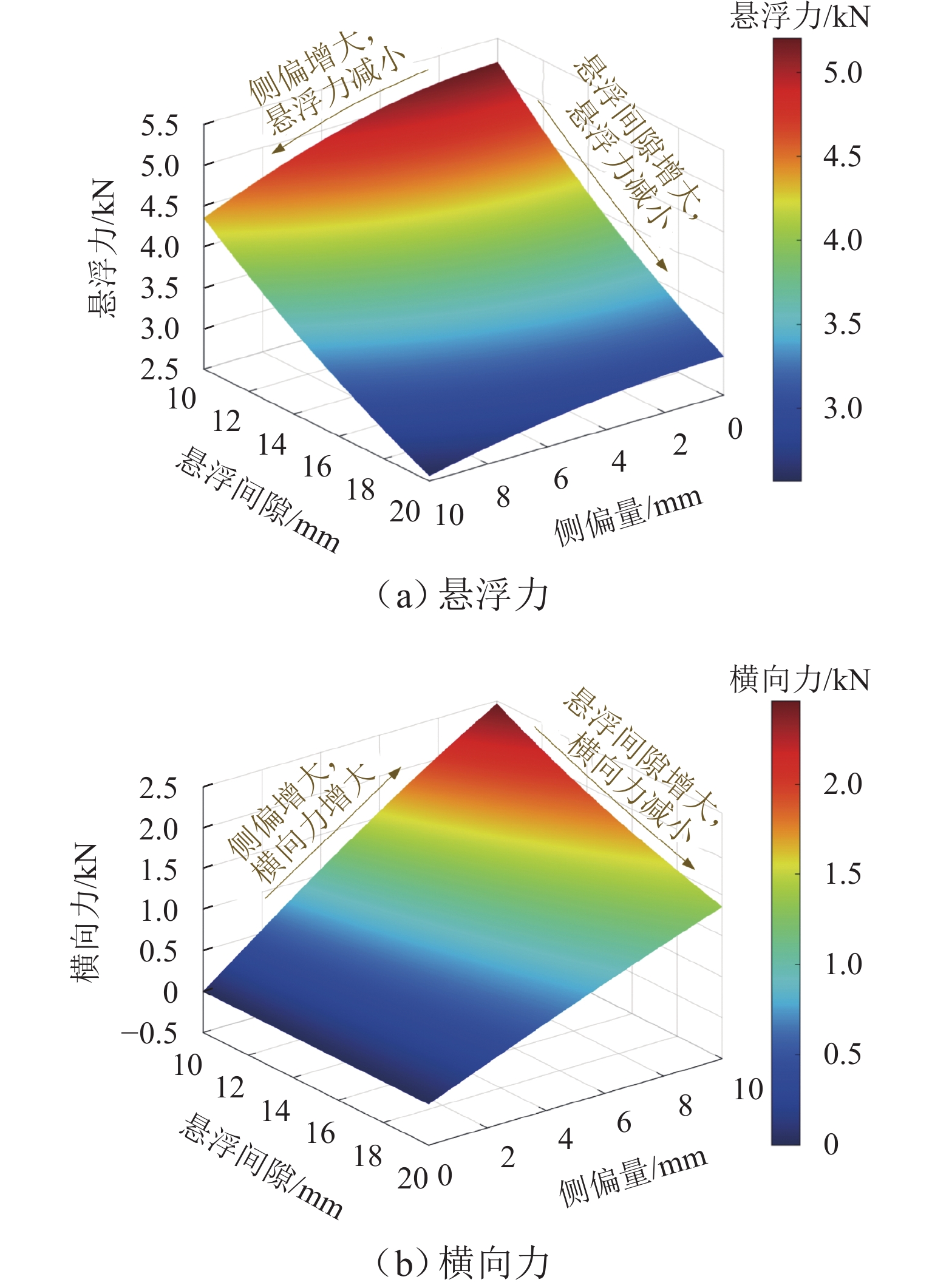
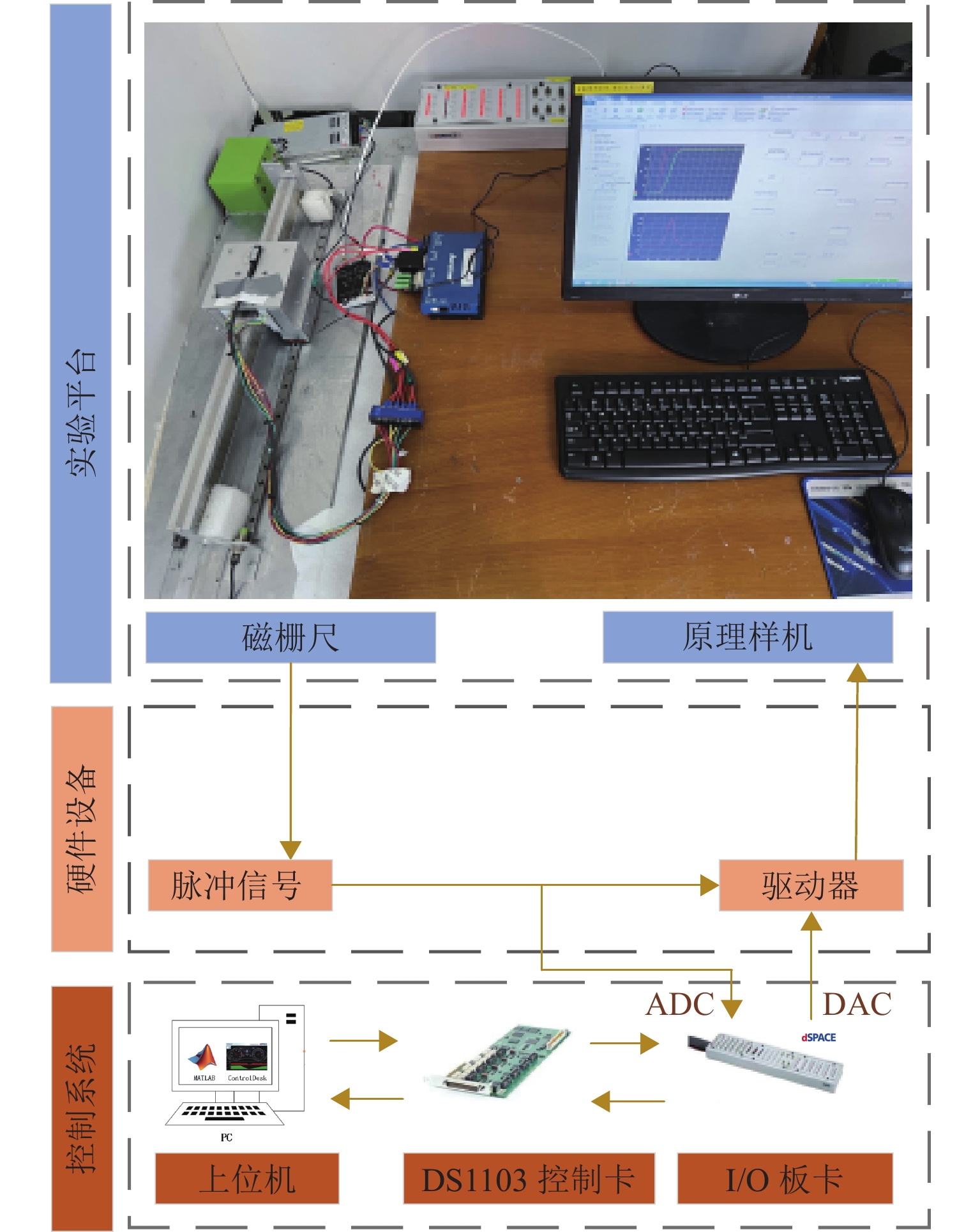
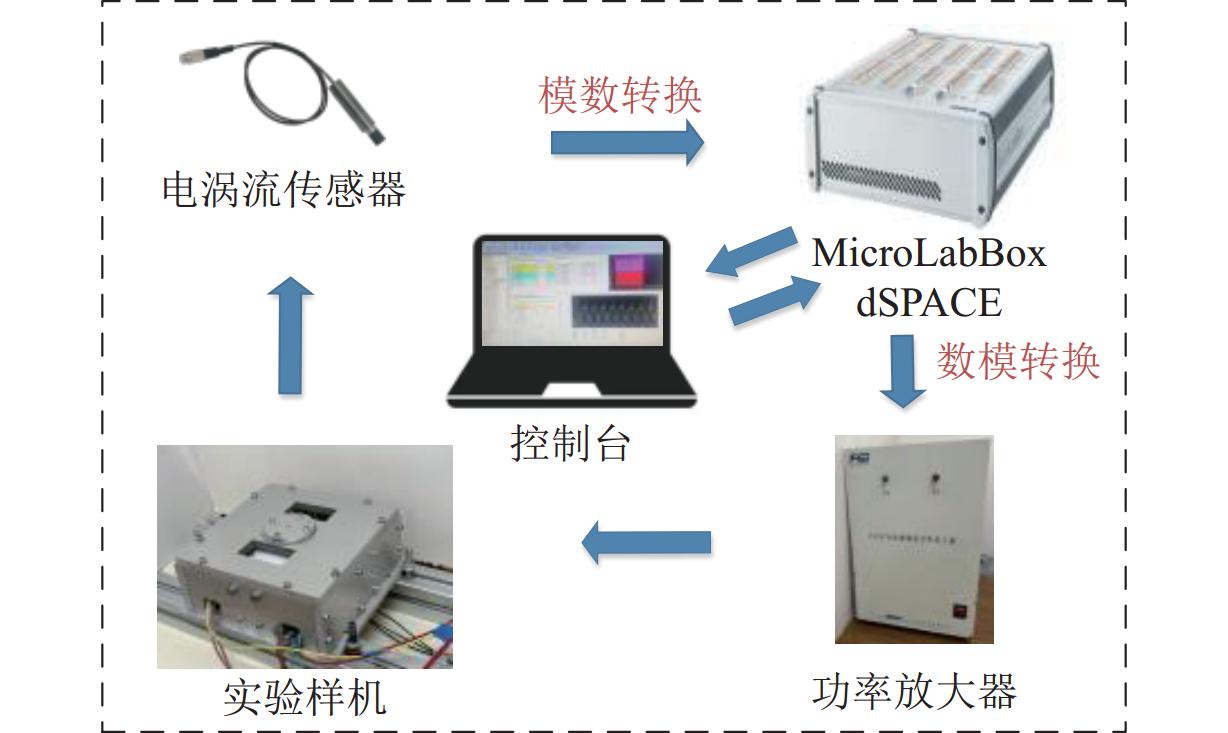
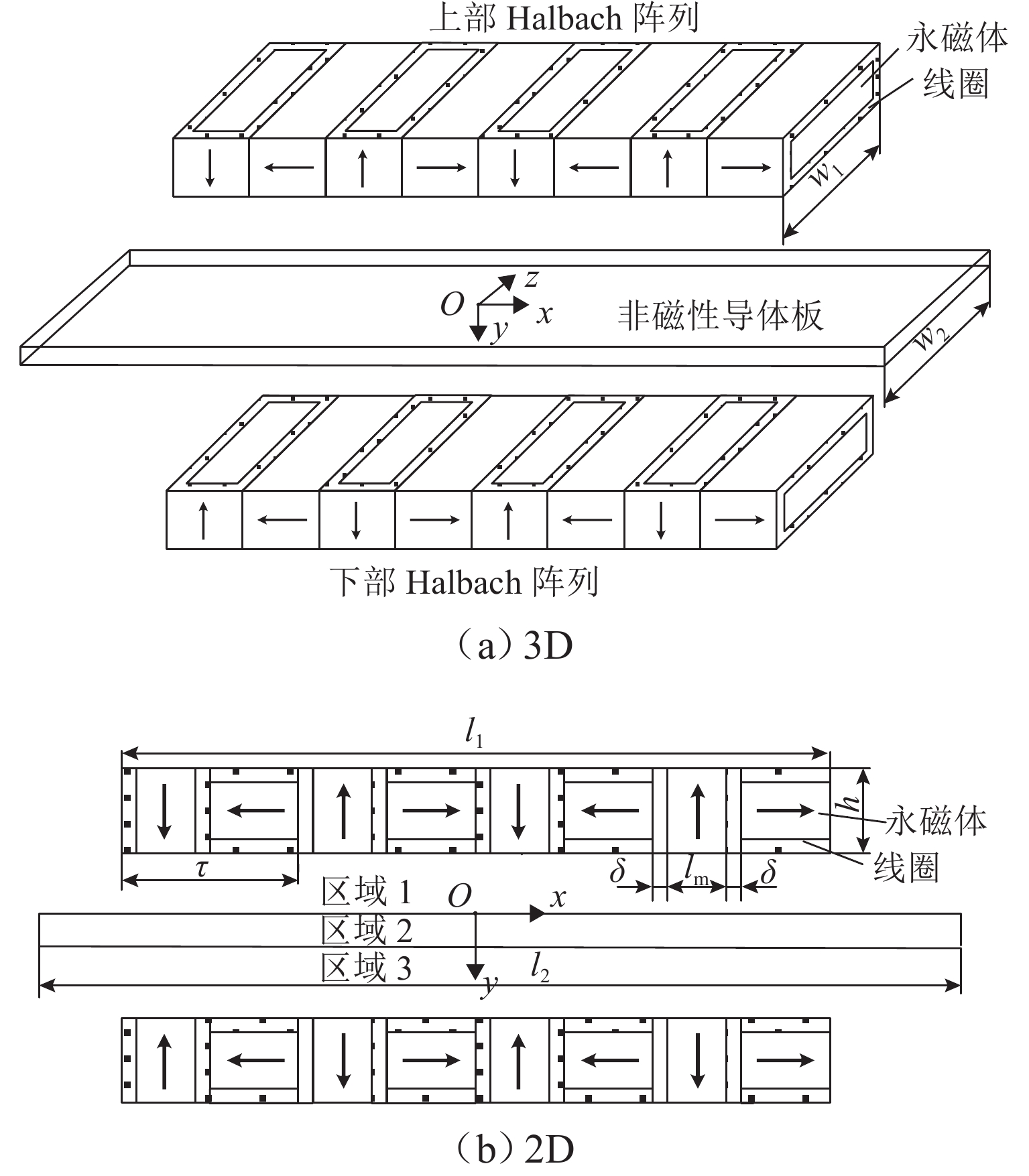
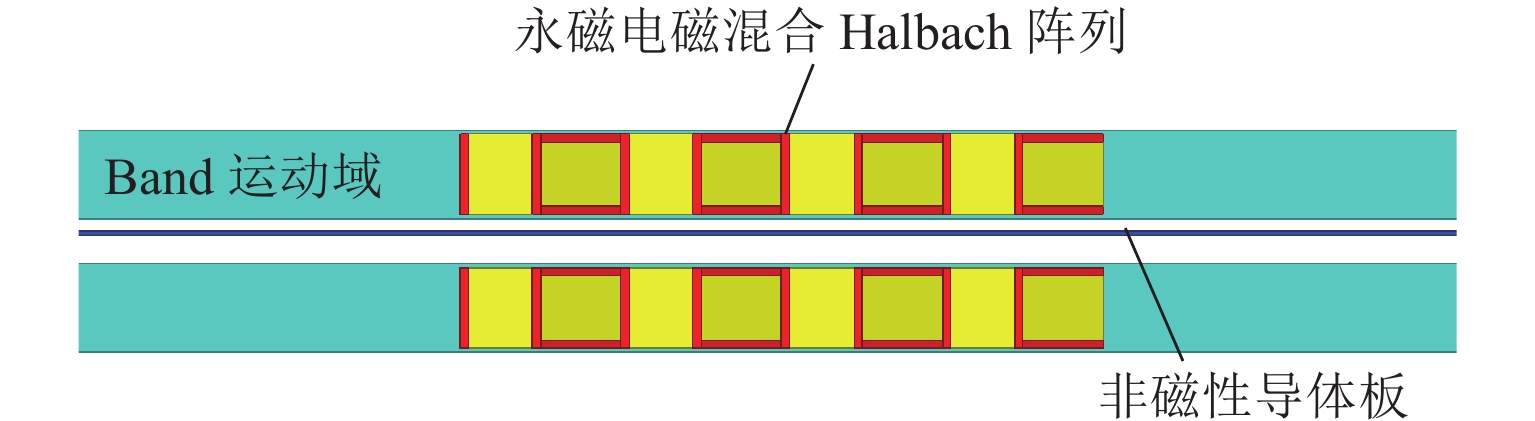
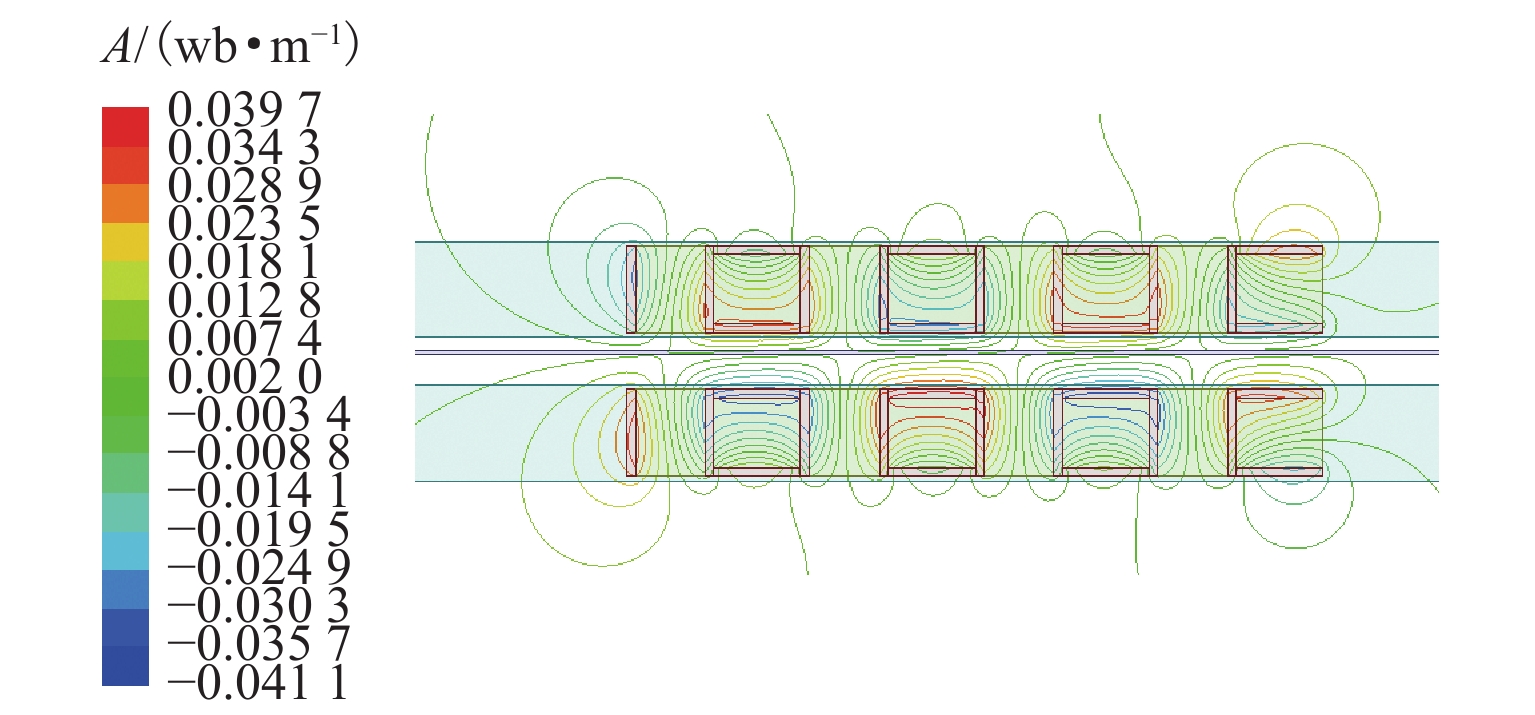
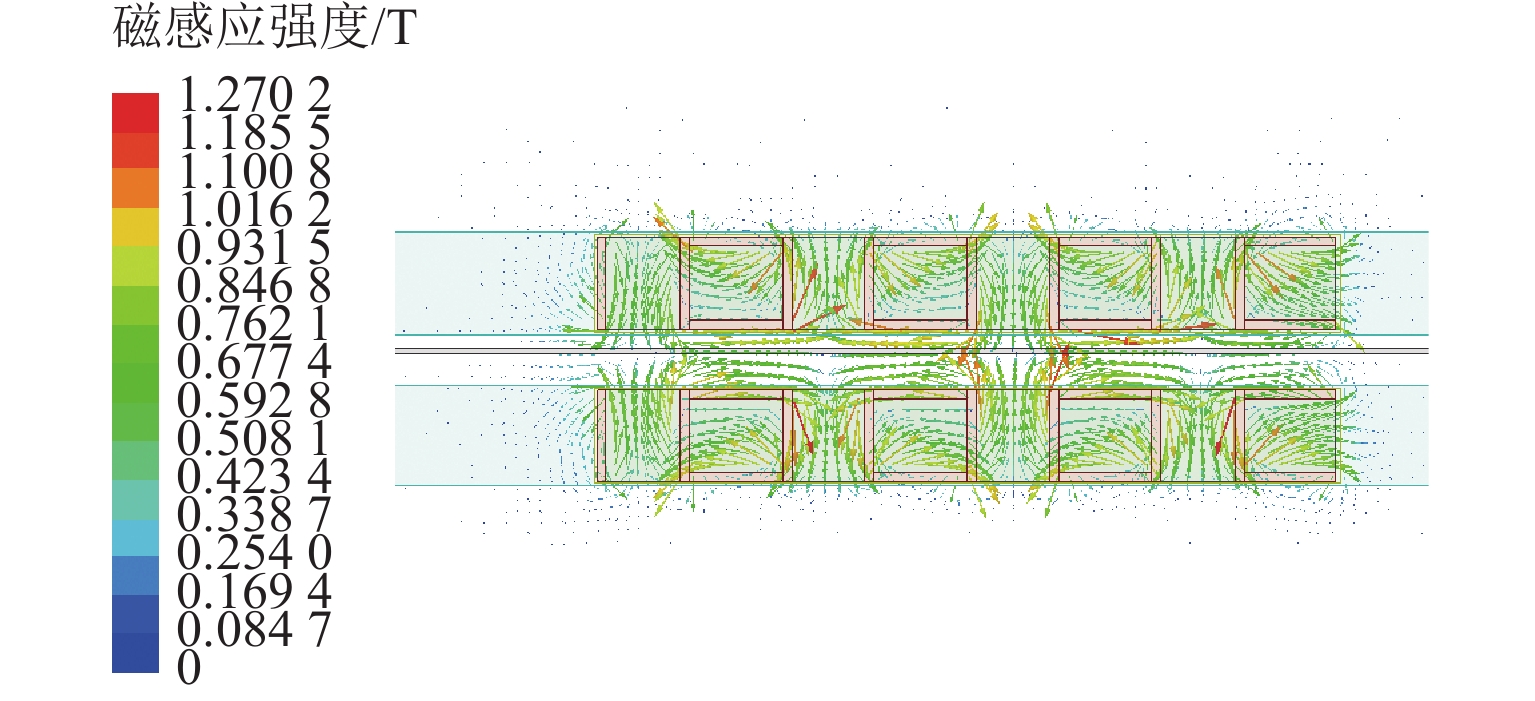
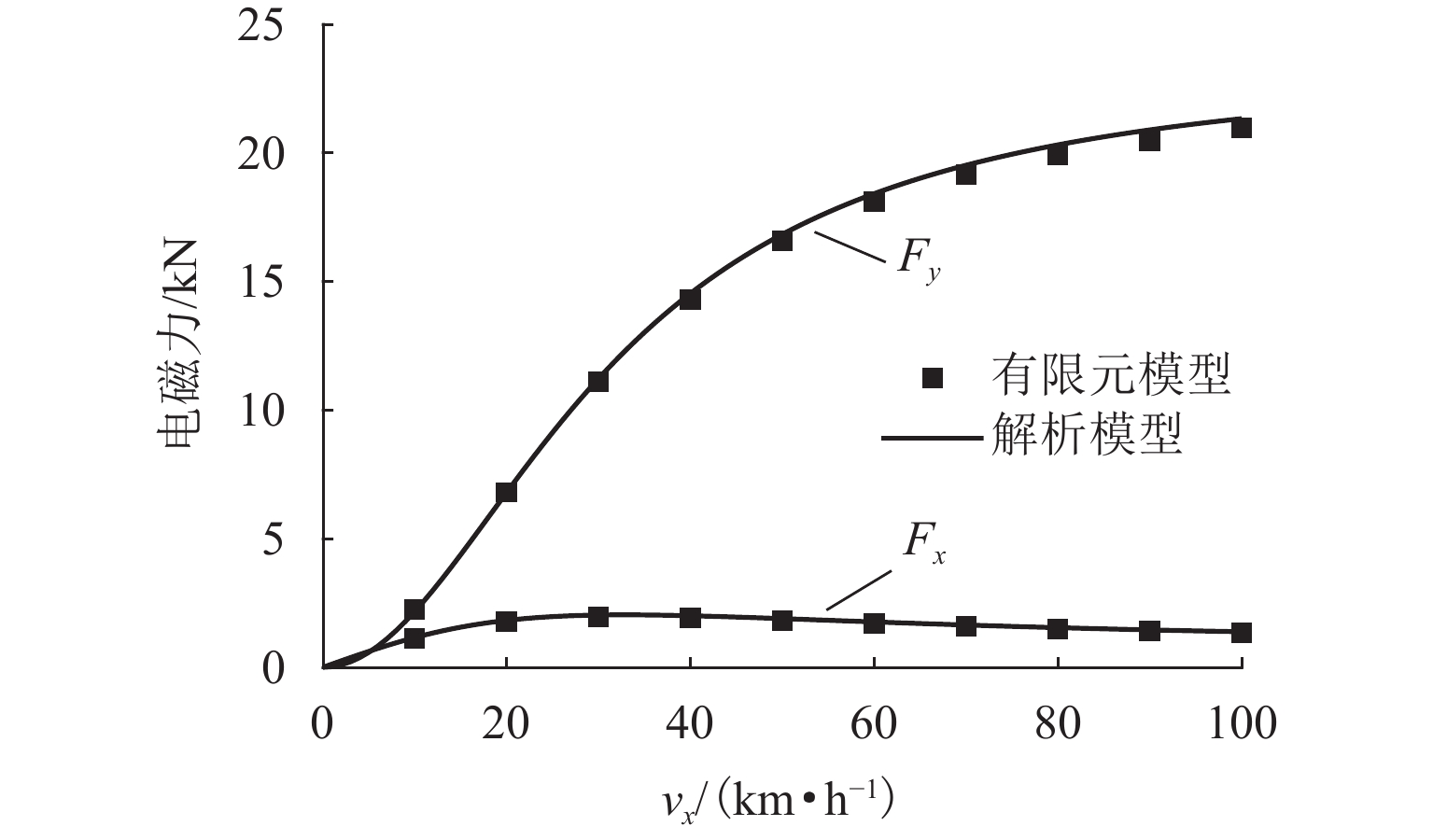
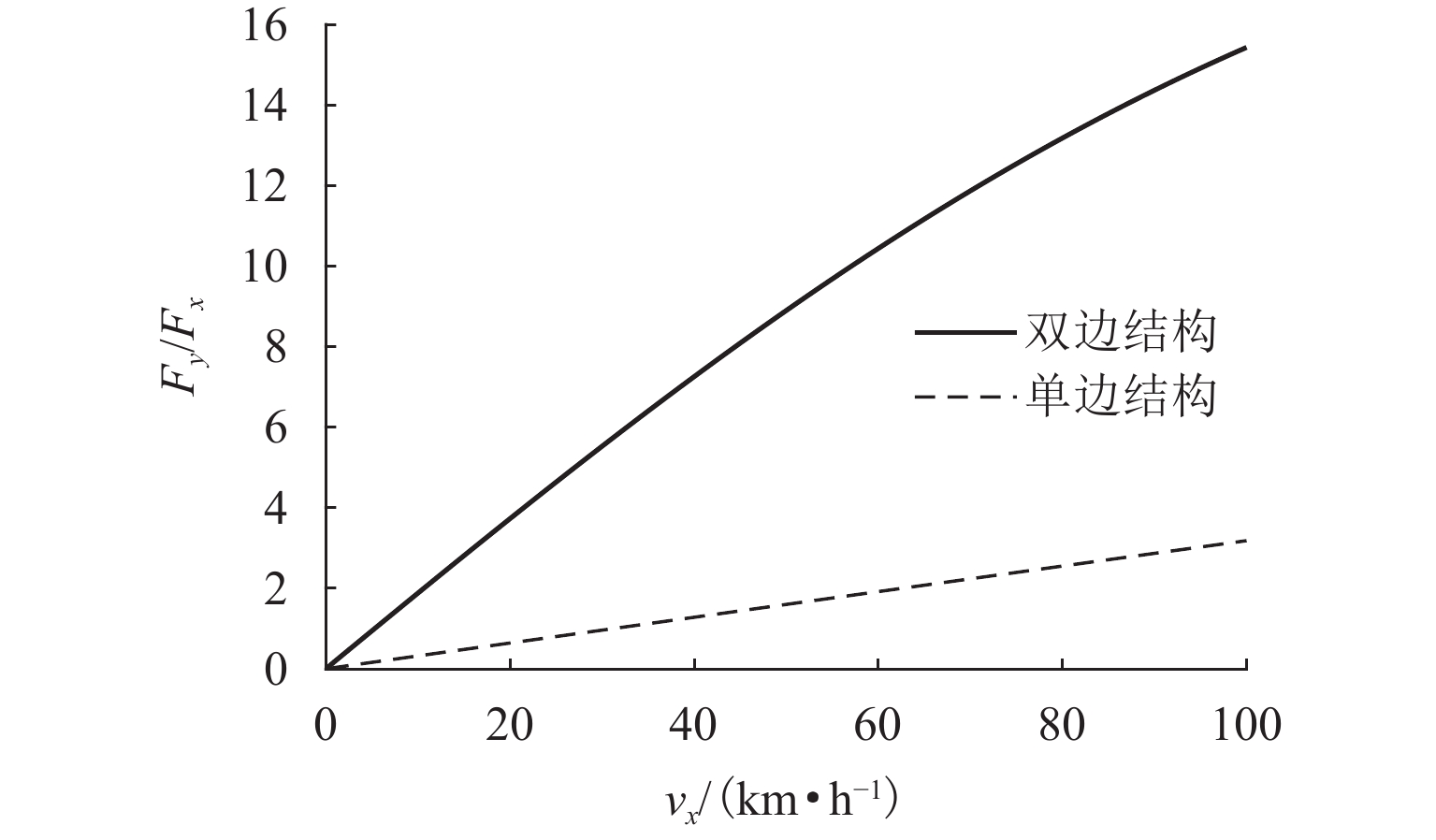
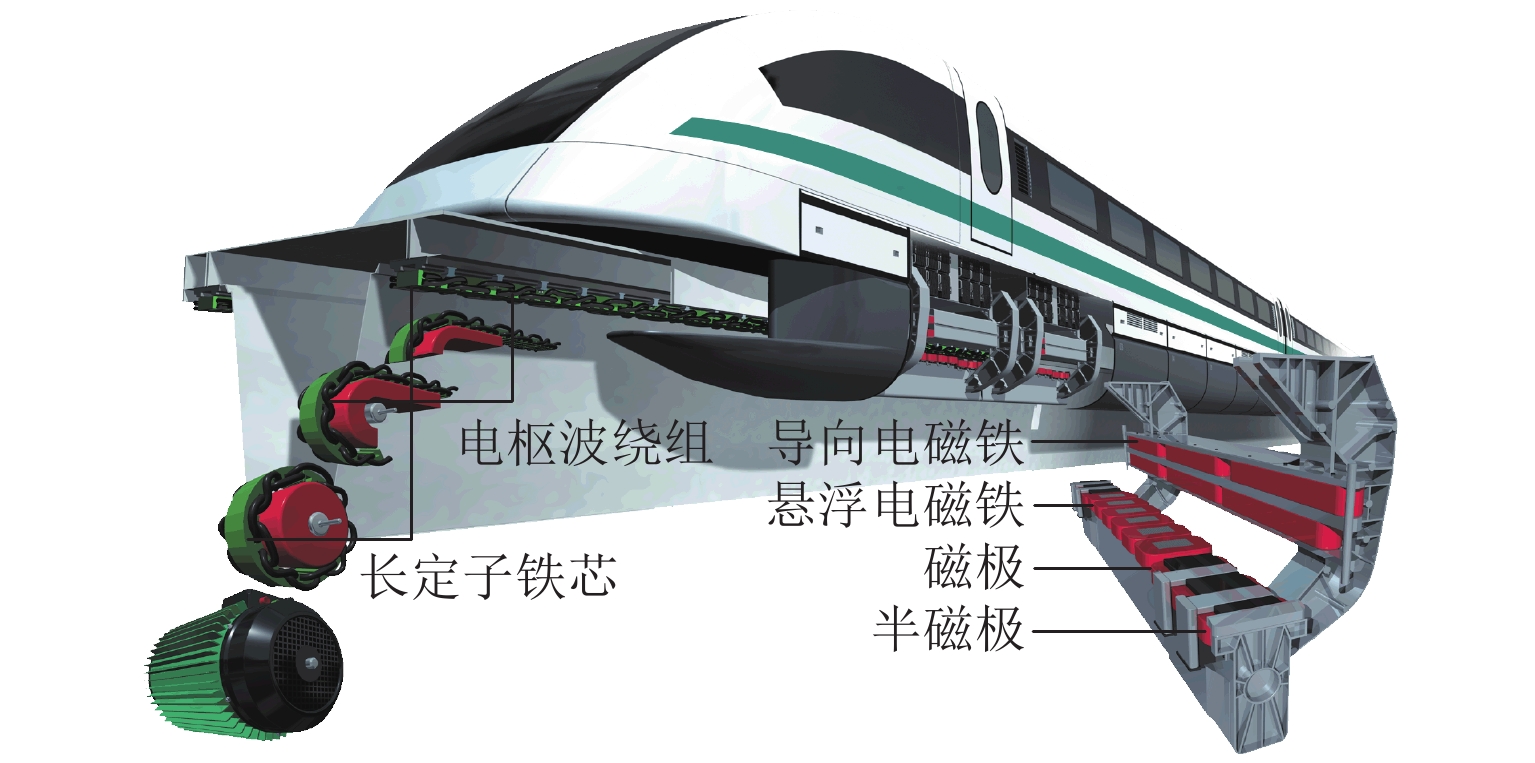
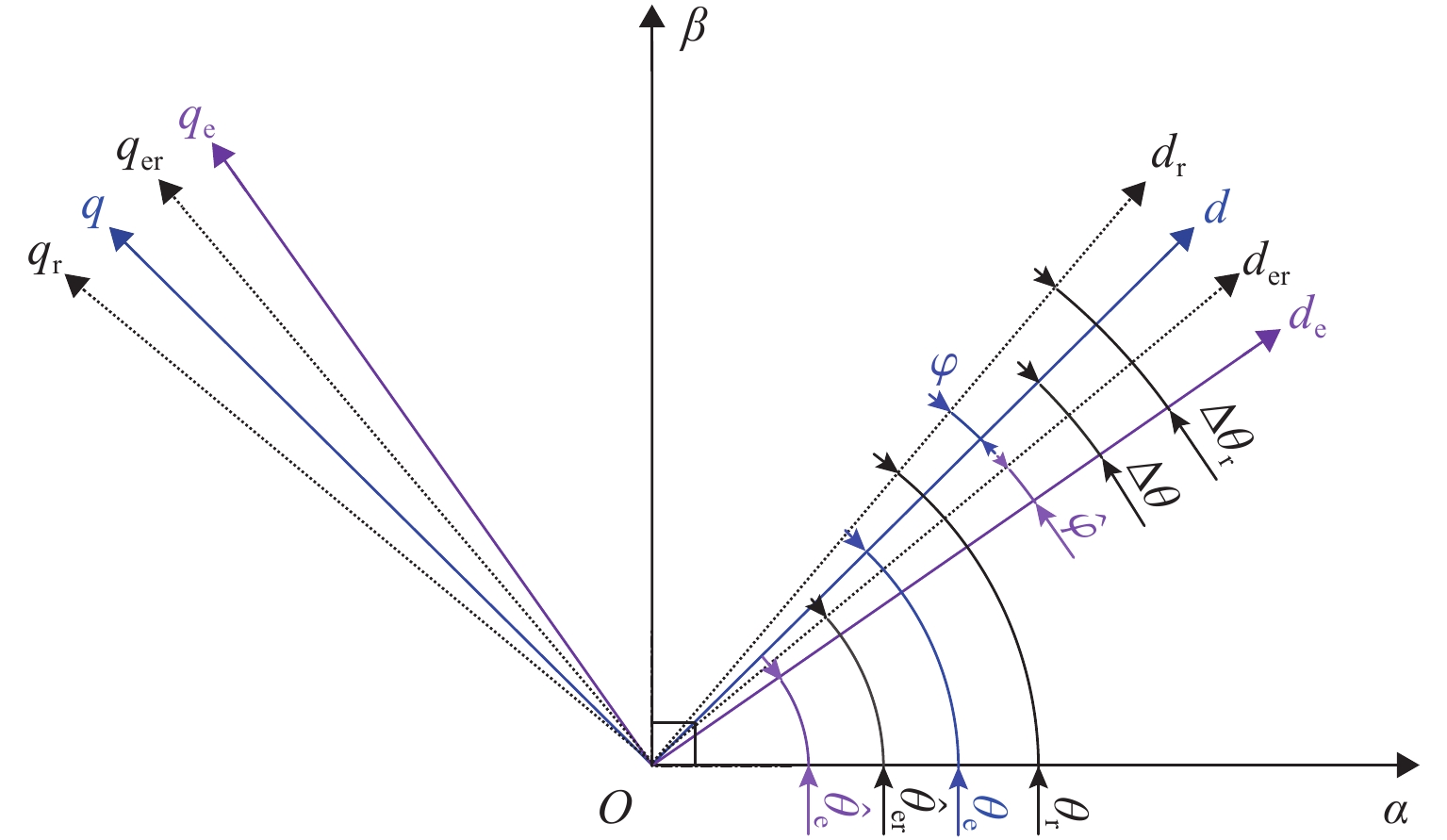
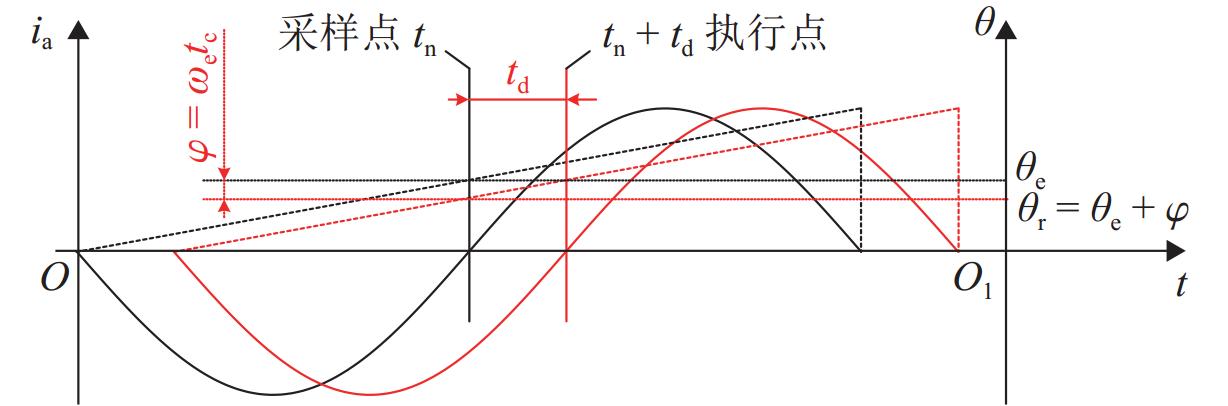
Methods In order to achieve precise control of the lateral motion and enhance the lateral anti-disturbance ability of the PMEDS vehicle, a lateral operation mode was proposed, and a lateral nonlinear dynamic model was derived. Moreover, an improved nonlinear model predictive lateral tracking controller (NMPC-ESO-EKF) with constraints was established, and its effectiveness was verified by simulation and experiment. Firstly, the working principle of the radial annular Halbach permanent magnet wheel was introduced; the feasibility of compensating for the lateral force of the system by deflecting the magnetic wheels was analyzed, and the vehicle’s lateral operation mode via symmetrically deflecting the same-side magnetic wheels was proposed. Secondly, according to the principle of lateral operation, the lateral damping term was introduced to derive the lateral nonlinear dynamic model for the PMEDS vehicle. Then, based on the dynamic model, a nonlinear discrete state-space model was derived as the prediction model; a cost function and the amplitude constraint of the deflection angle were designed. According to the prediction model, cost function, and system constraints, the nonlinear model predictive controller (NMPC) was established; the control problem was transformed into a nonlinear programming problem in the finite time domain. Meanwhile, in order to improve the anti-disturbance ability of the NMPC, the extended state observer (ESO) was constructed to observe the internal and external disturbances of the system, compensating for the control input. In order to reduce the sensitivity of ESO to sensor measurement noise, an extended Kalman filter (EKF) was introduced to filter the raw signals. Moreover, the convergence of the overall control framework was demonstrated. Finally, the simulation and analysis of lateral constant trajectory tracking and lateral anti-disturbance under internal and external disturbances conditions were conducted using the MATLAB/Simulink-Simscape joint simulation platform. Additionally, experiments were performed by using the lateral running experimental device and the principle prototype, covering short-distance constant trajectory tracking, square wave signal trajectory tracking, and the analysis of anti-disturbance ability under long-distance constant trajectory tracking.
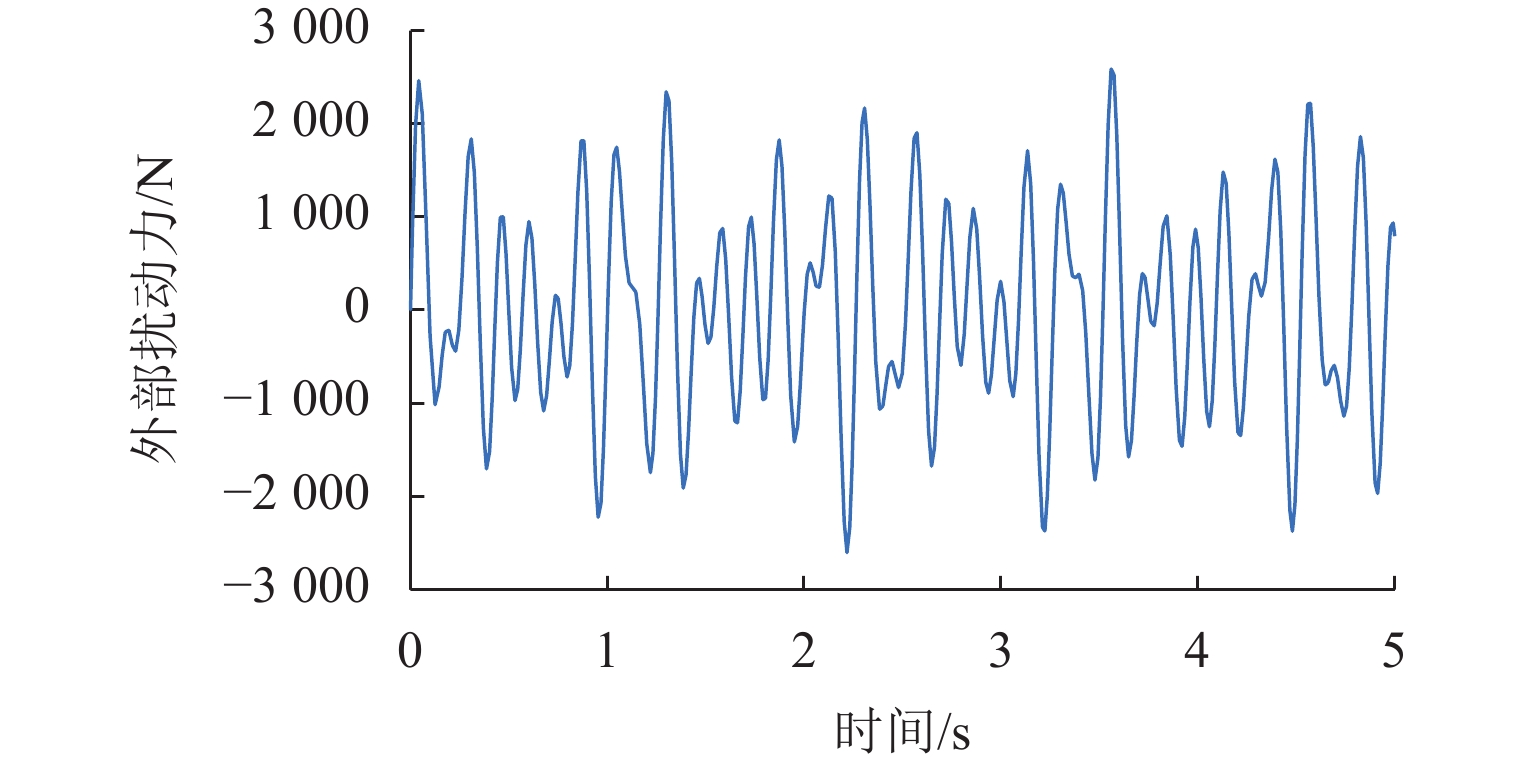
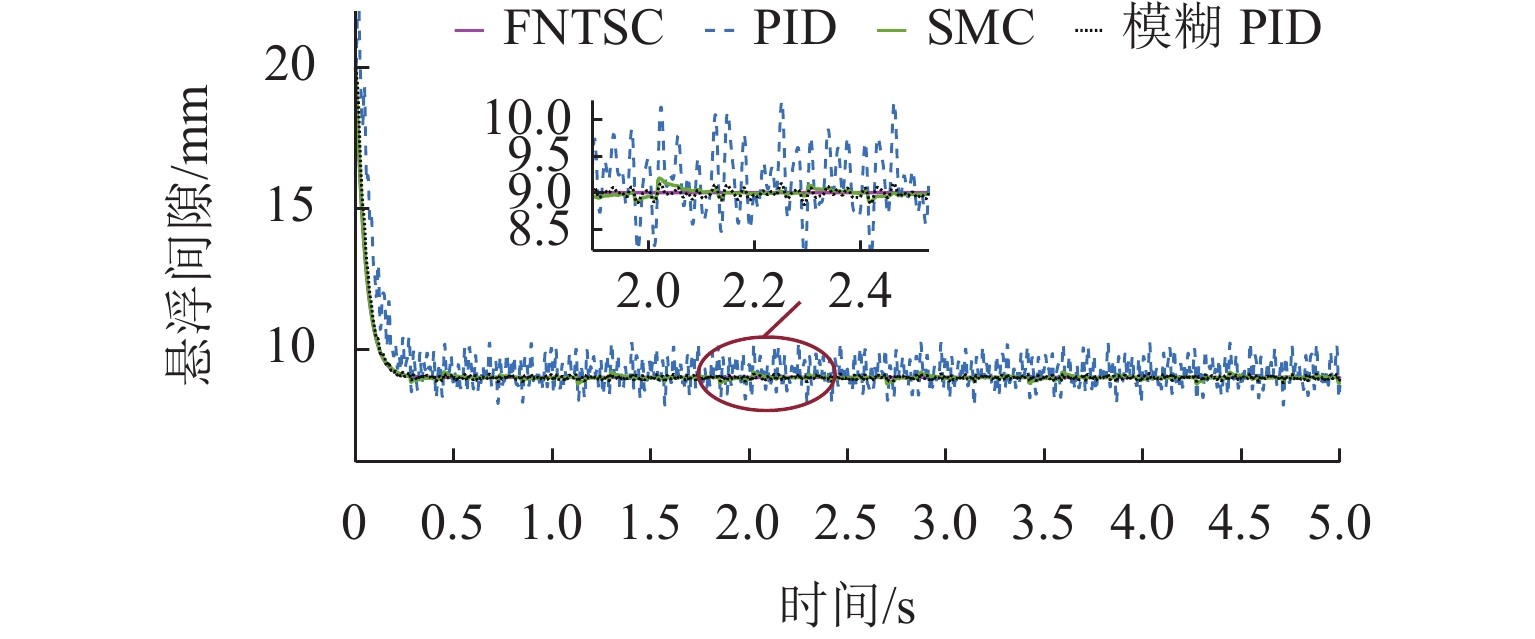
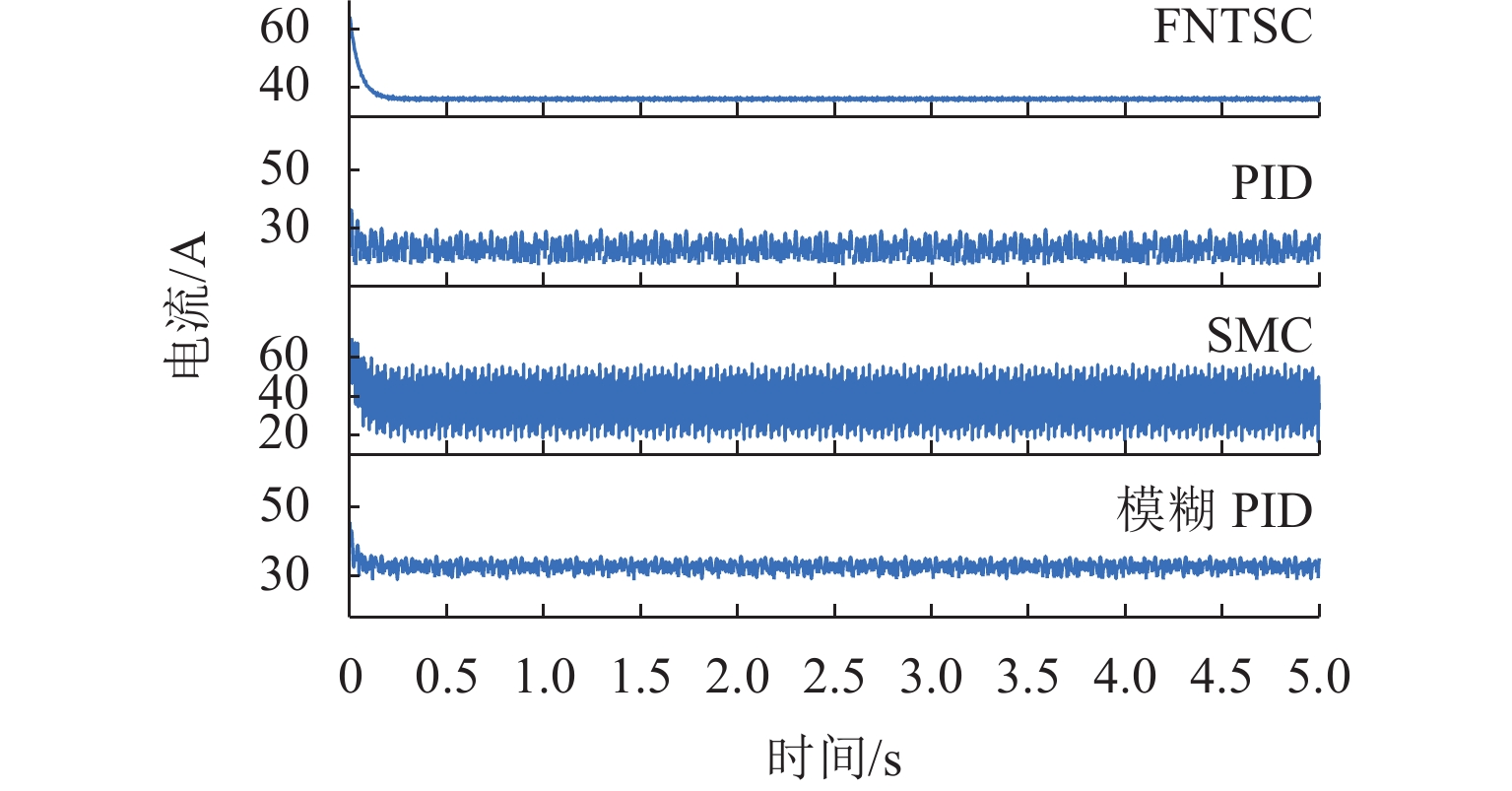
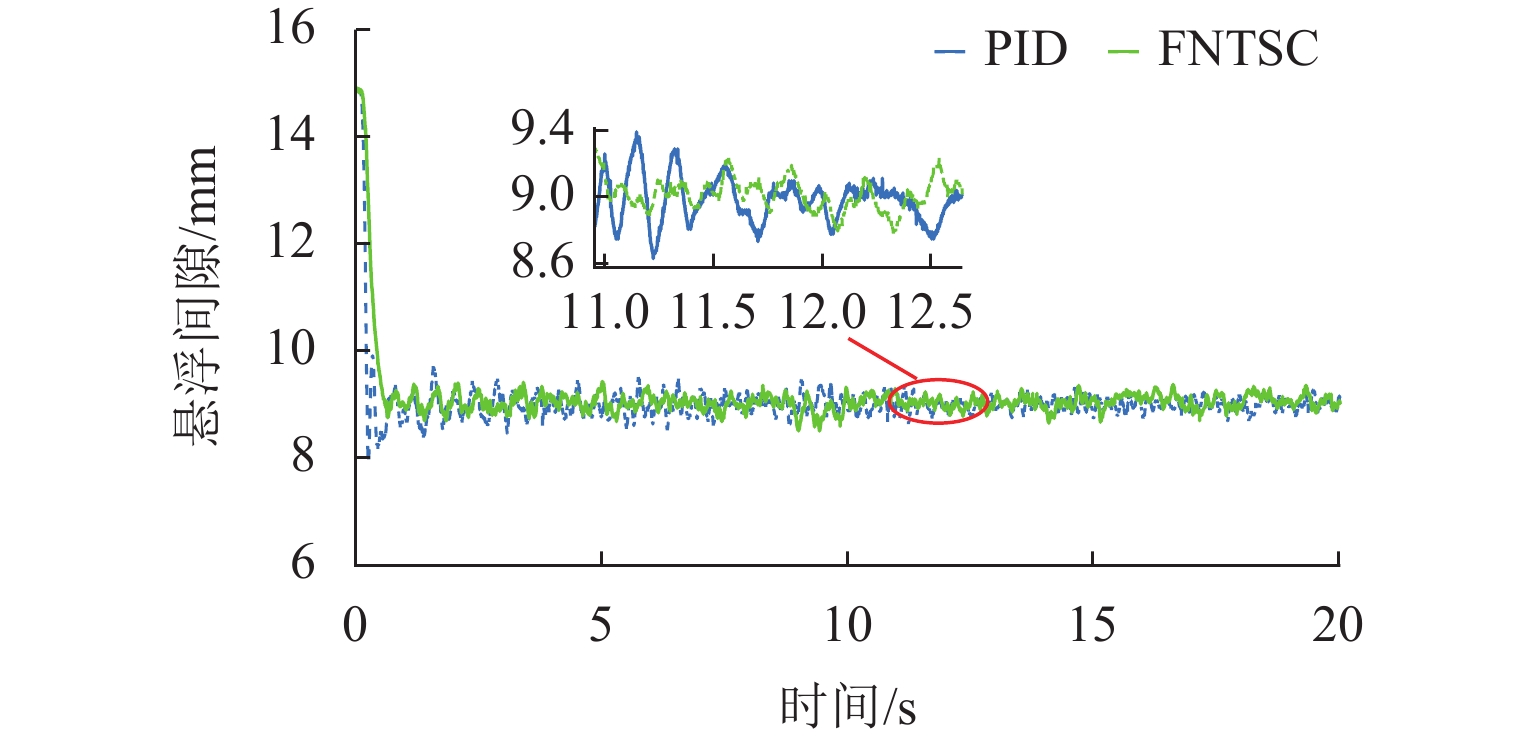
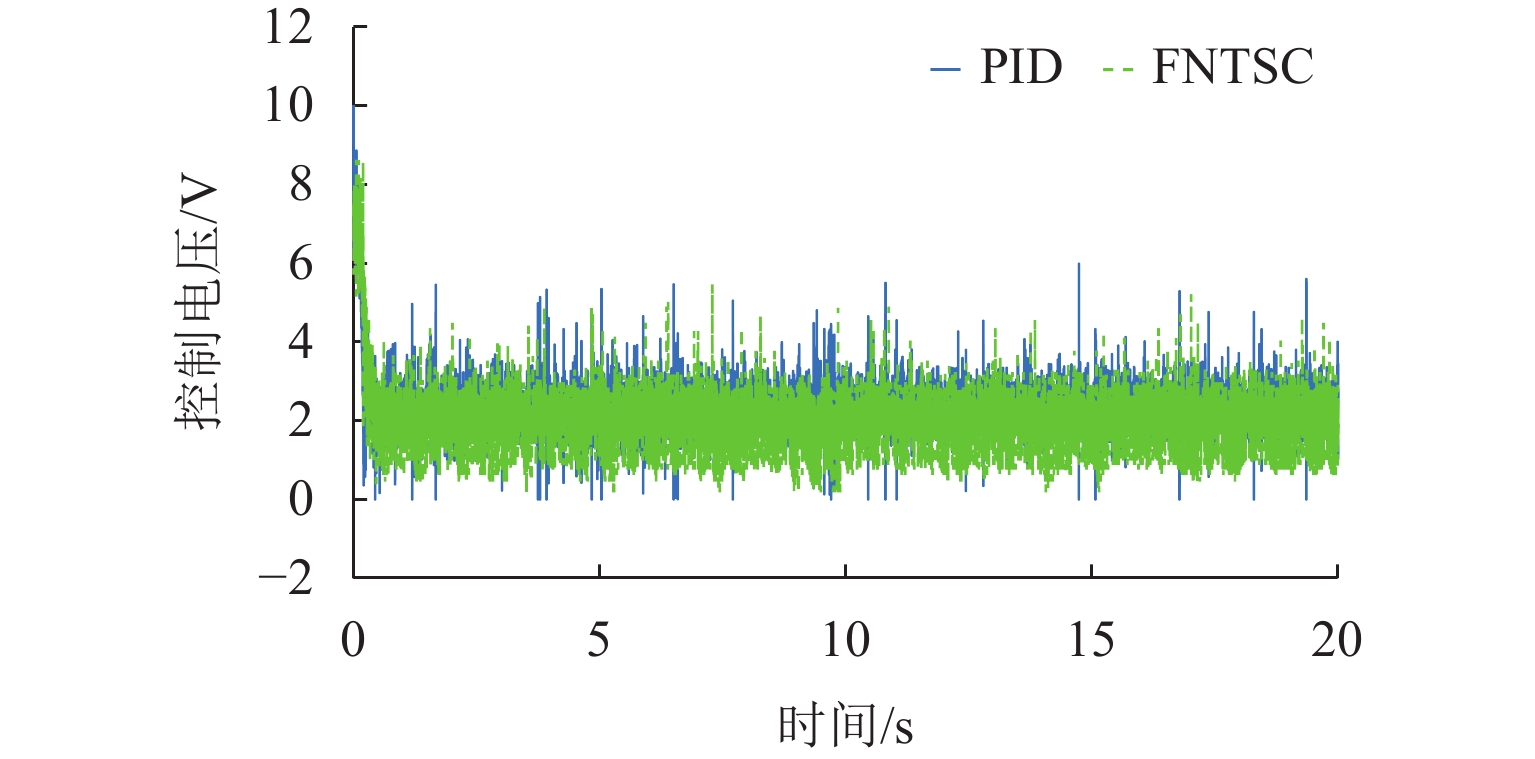
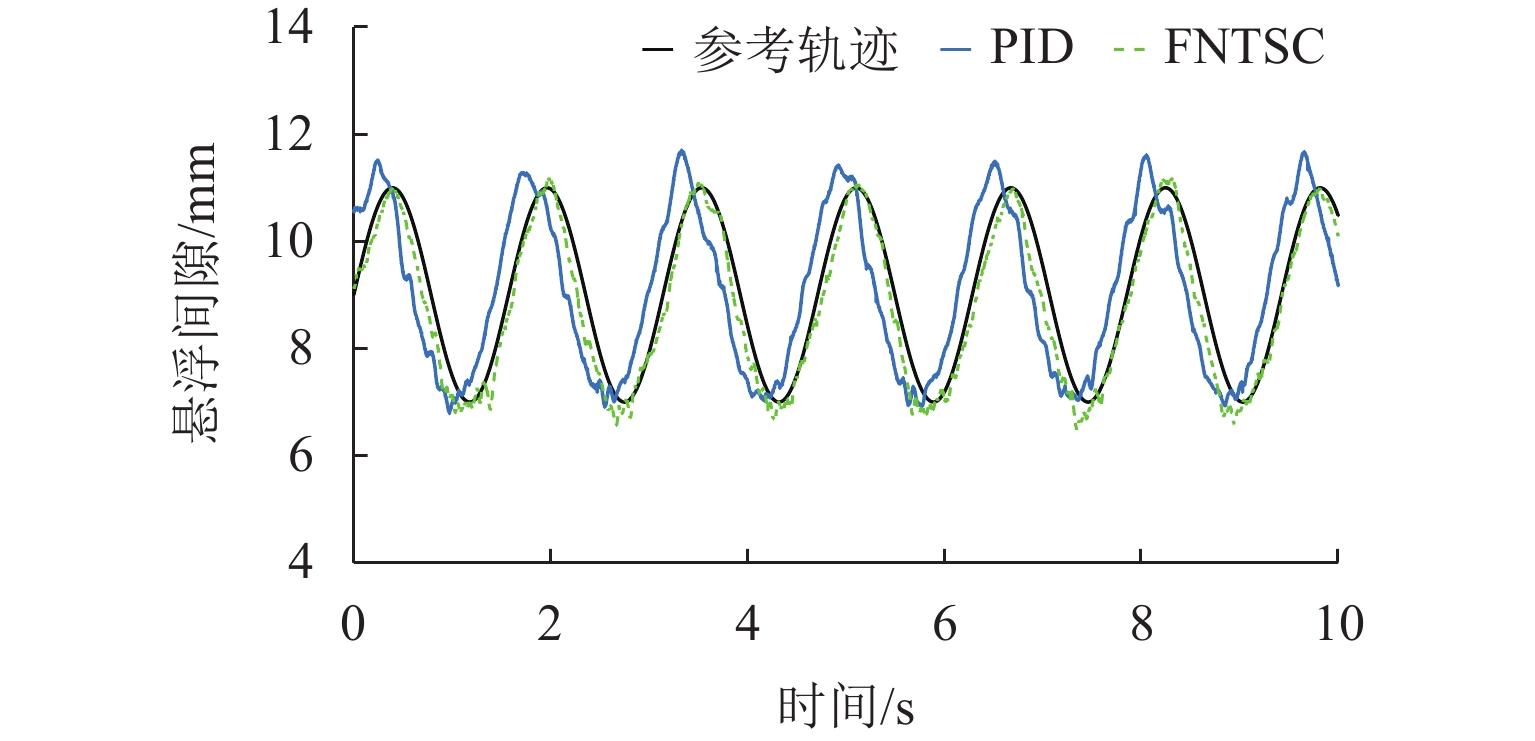
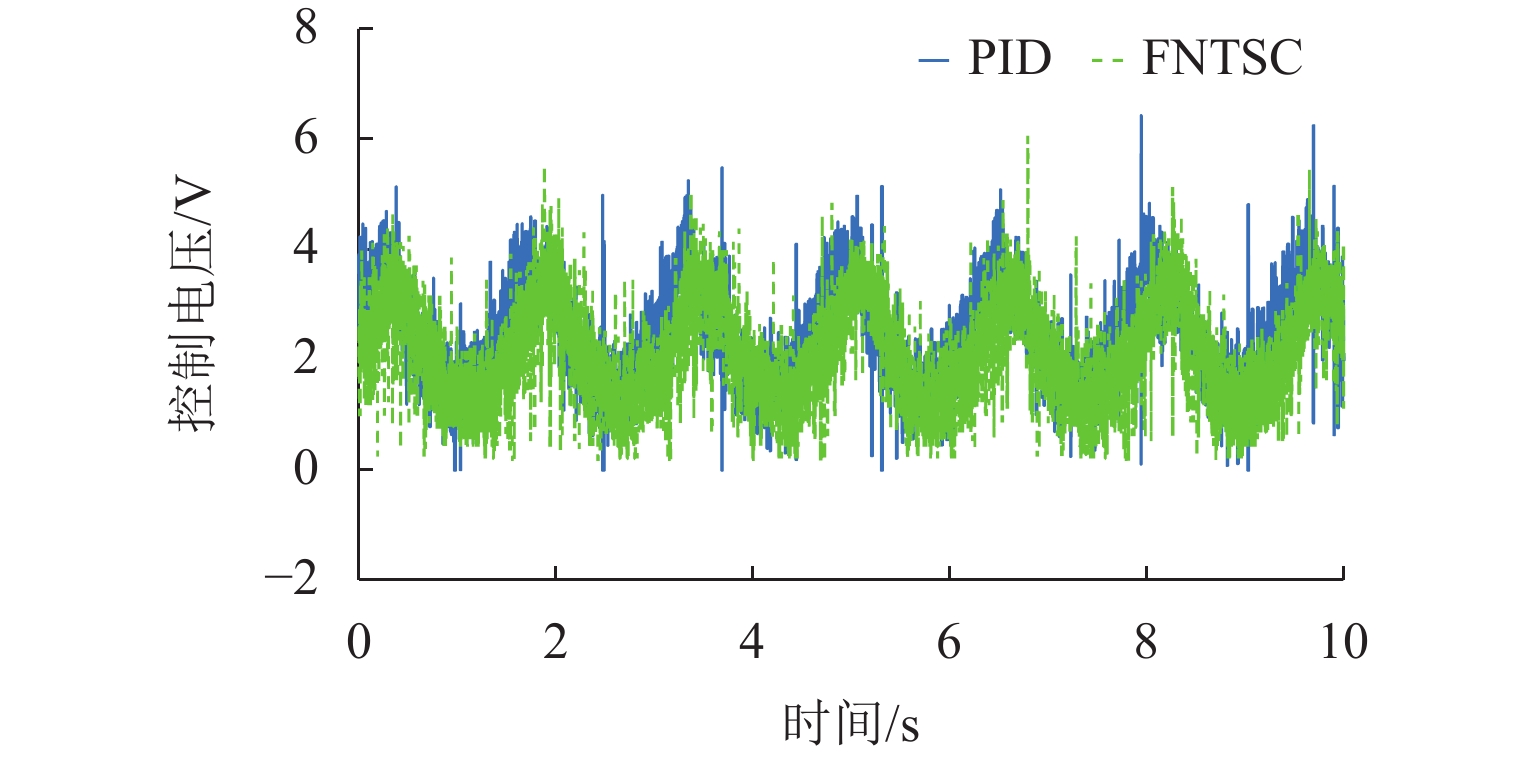
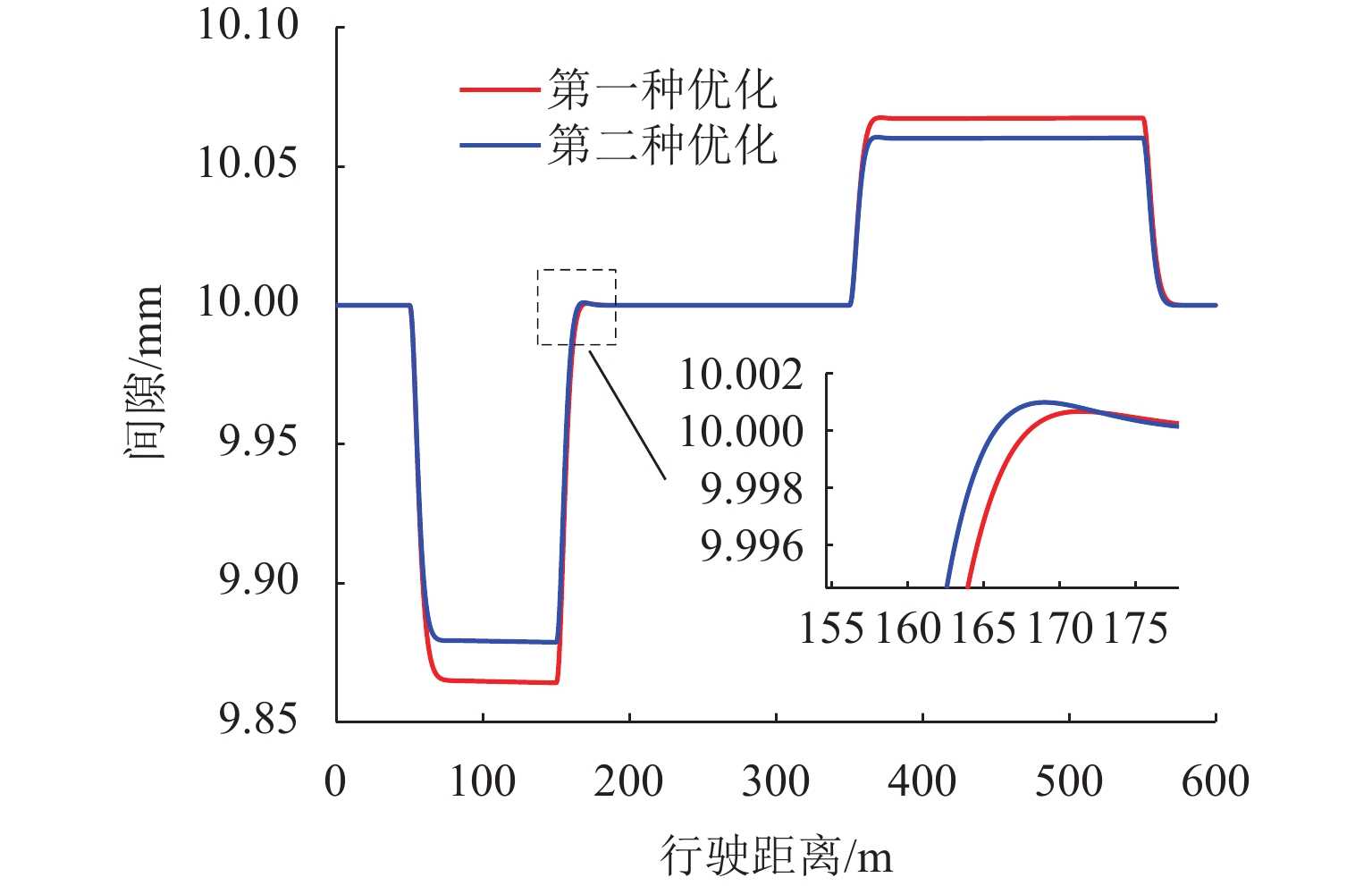
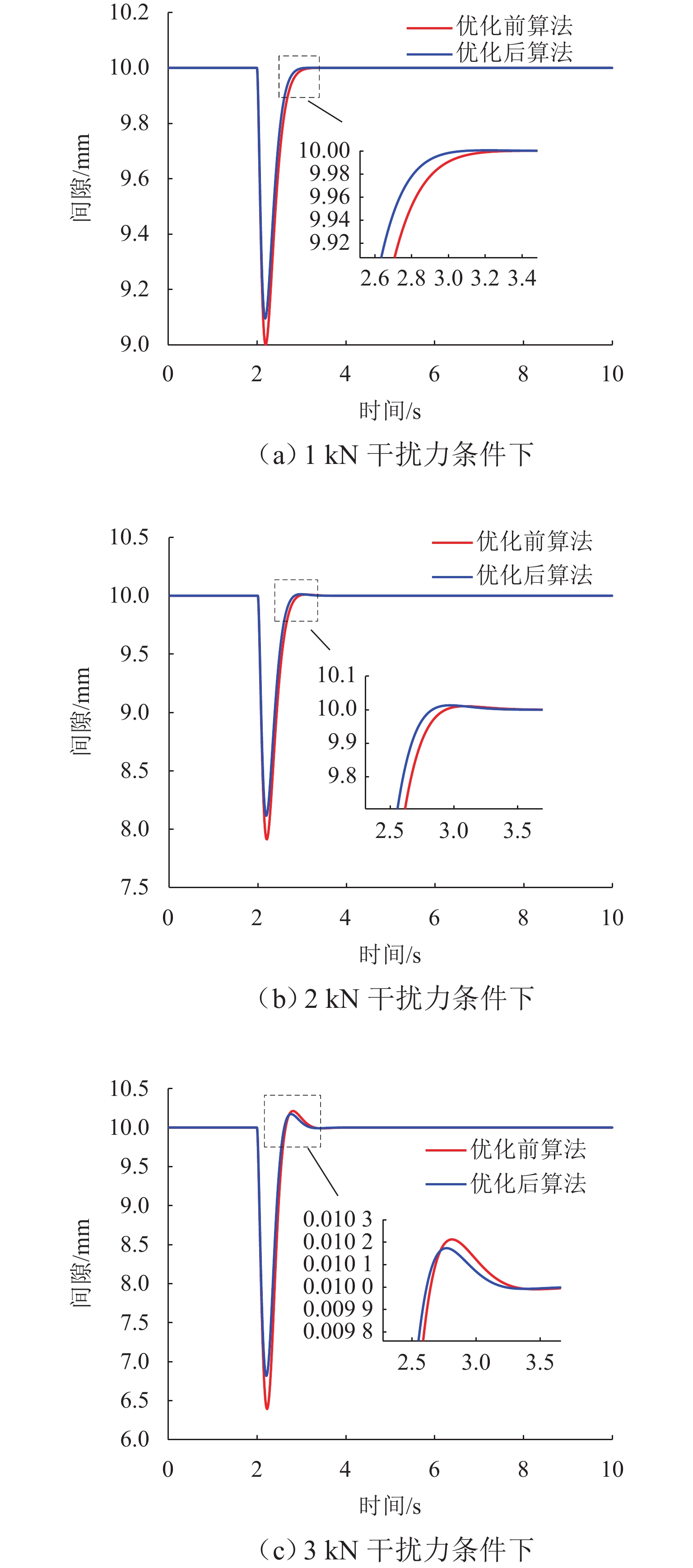
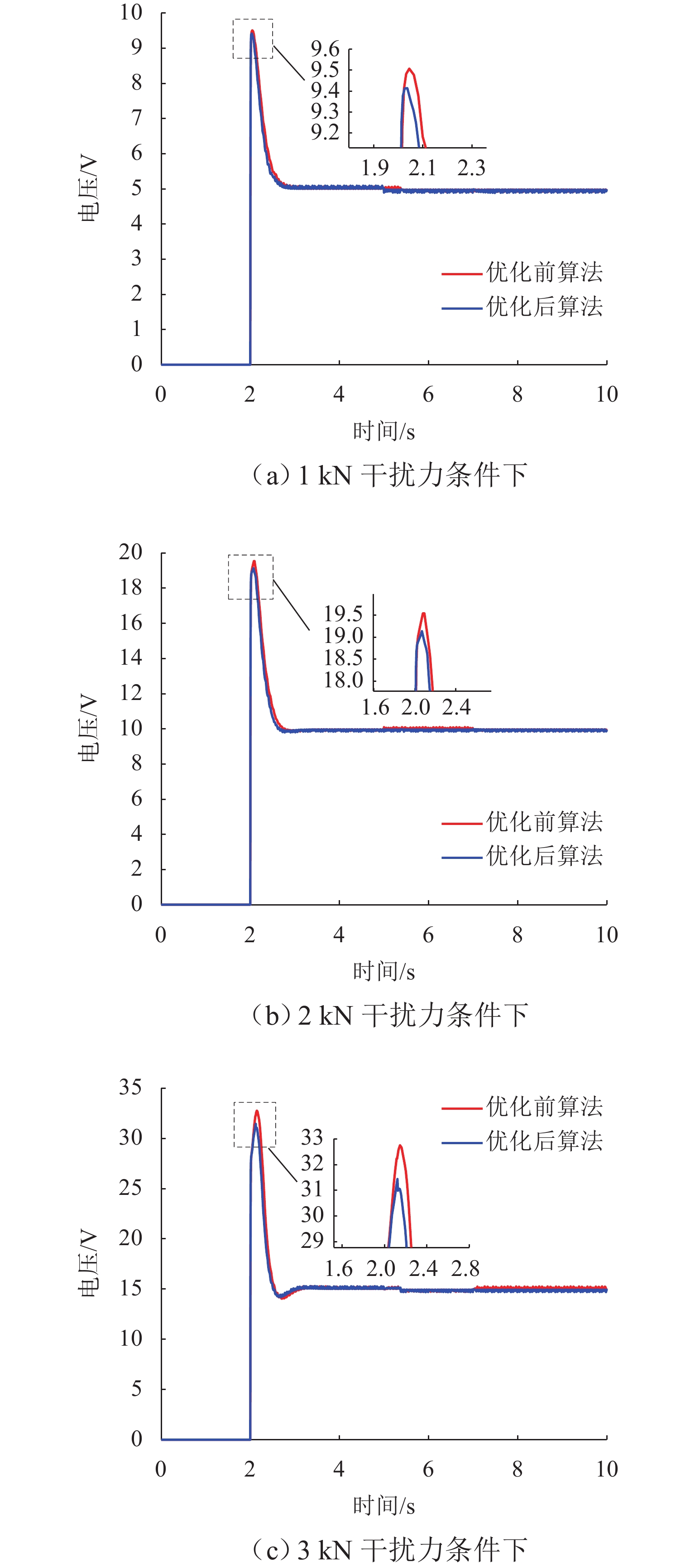
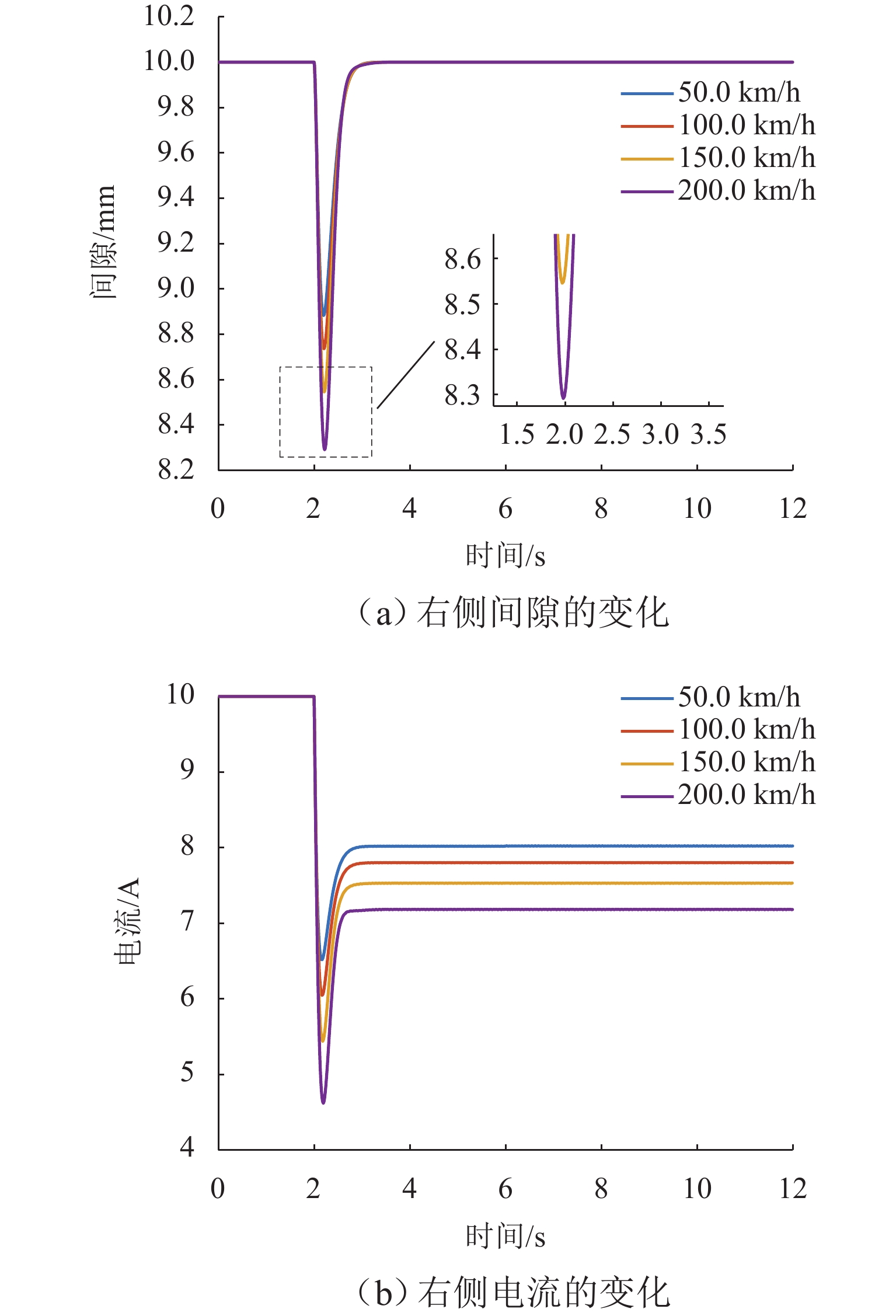
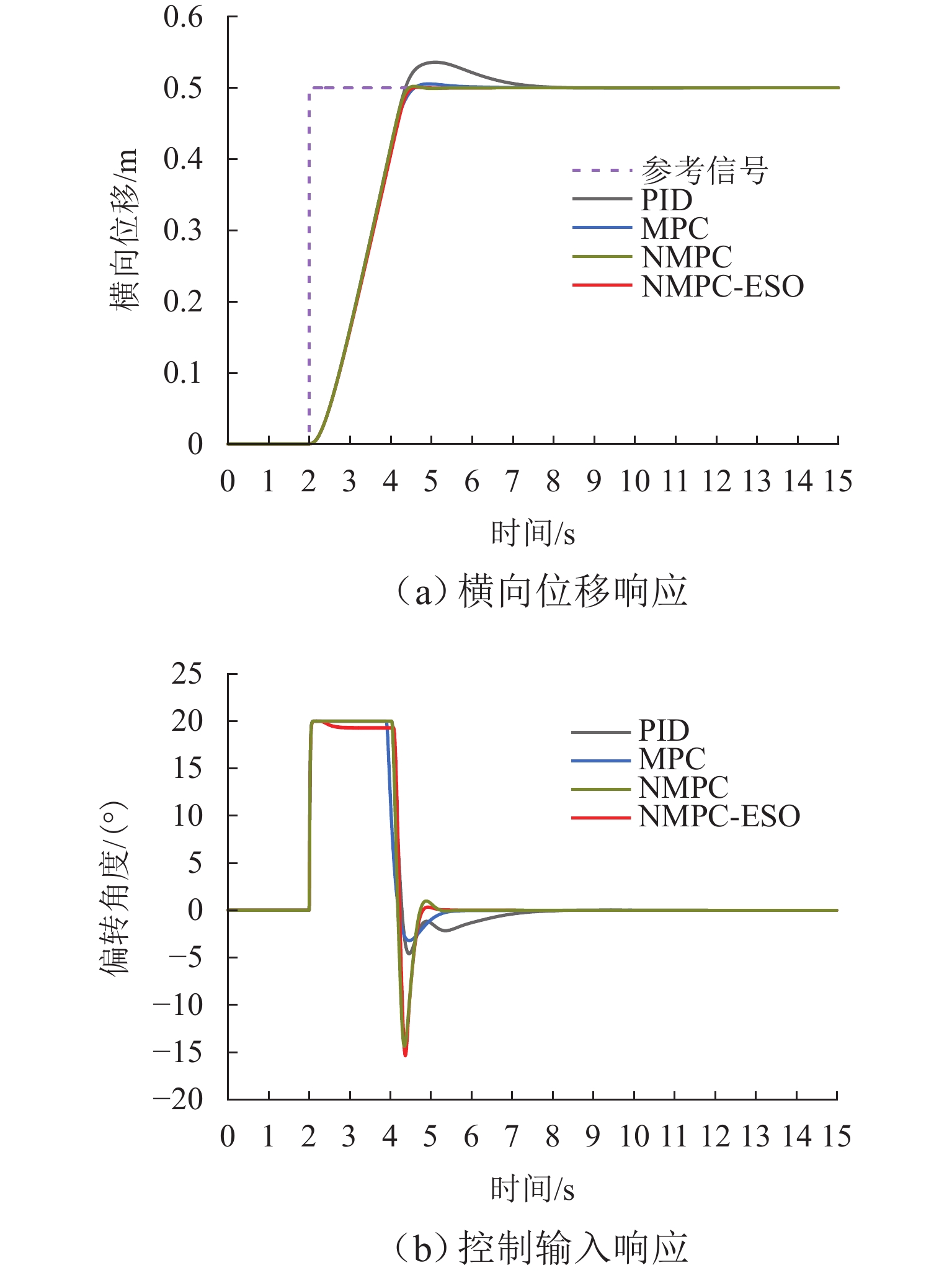
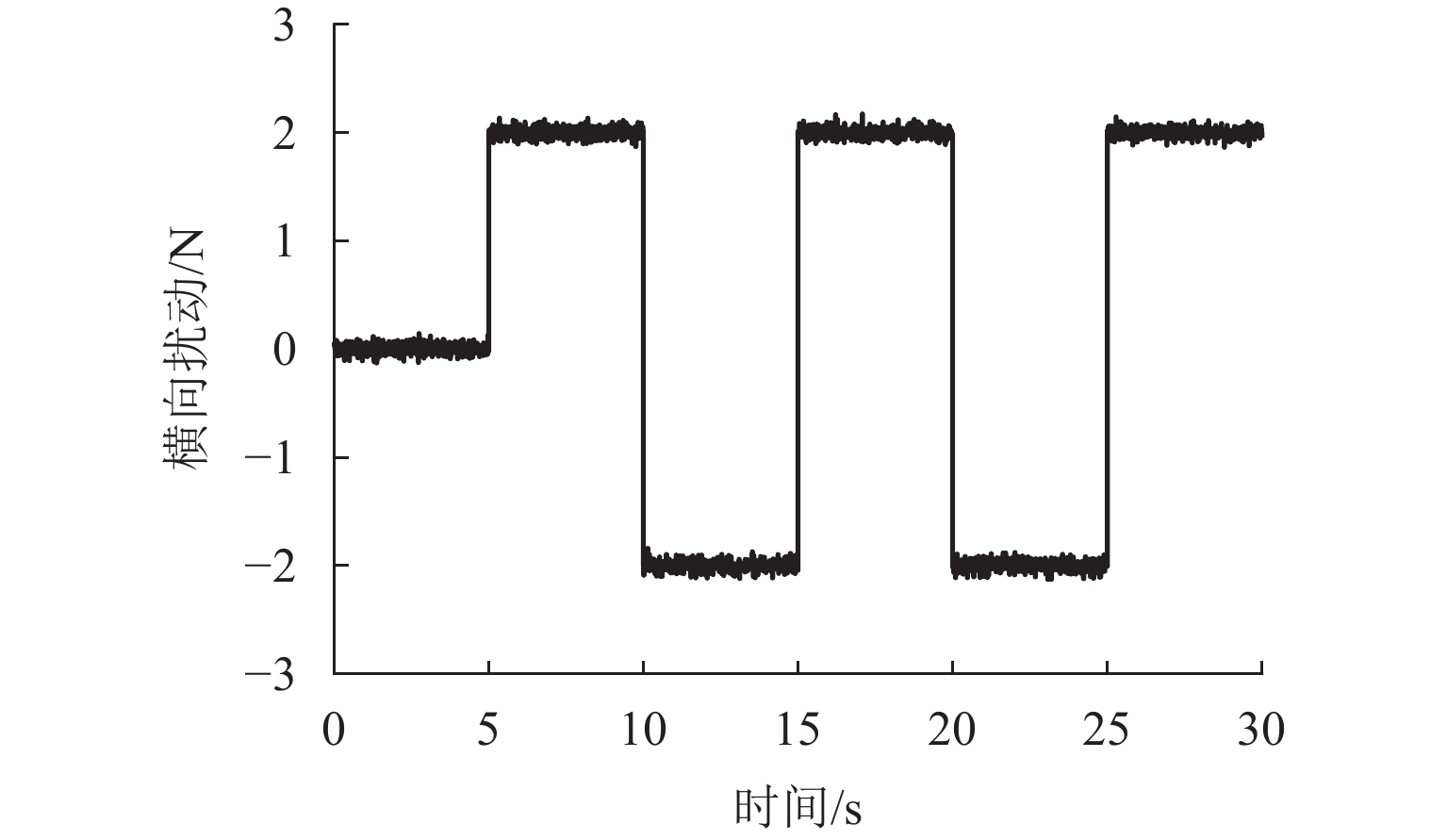
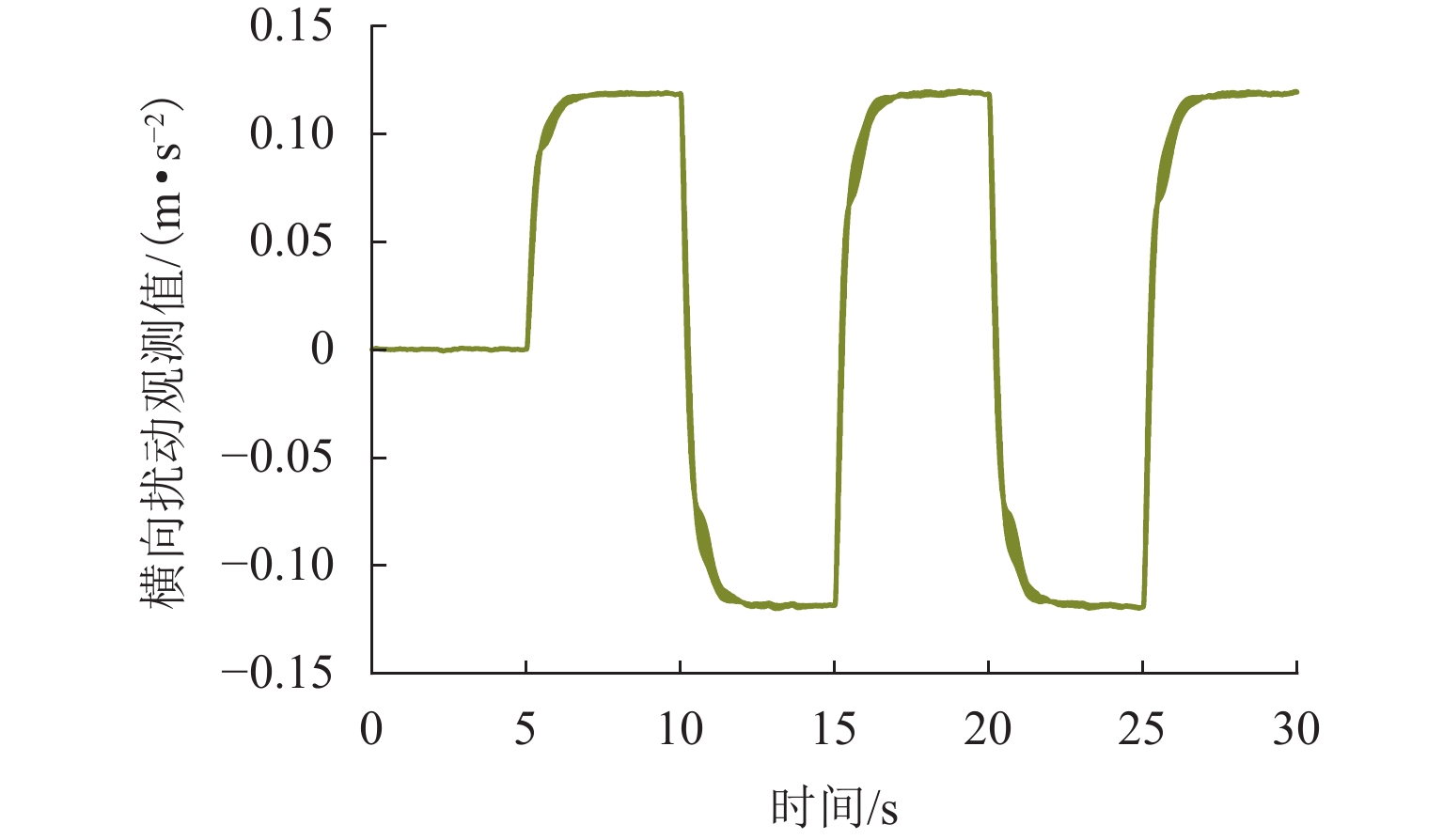
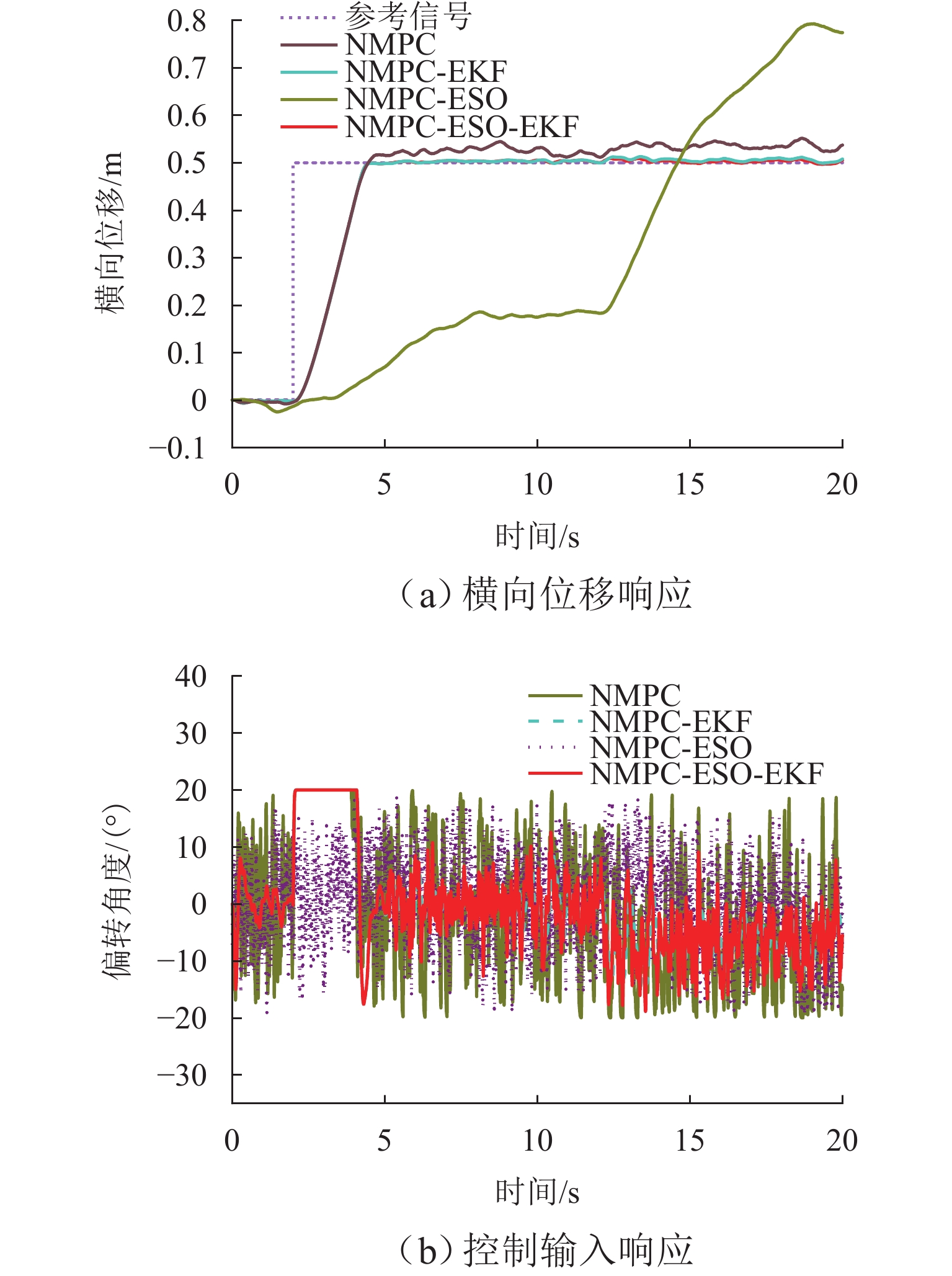
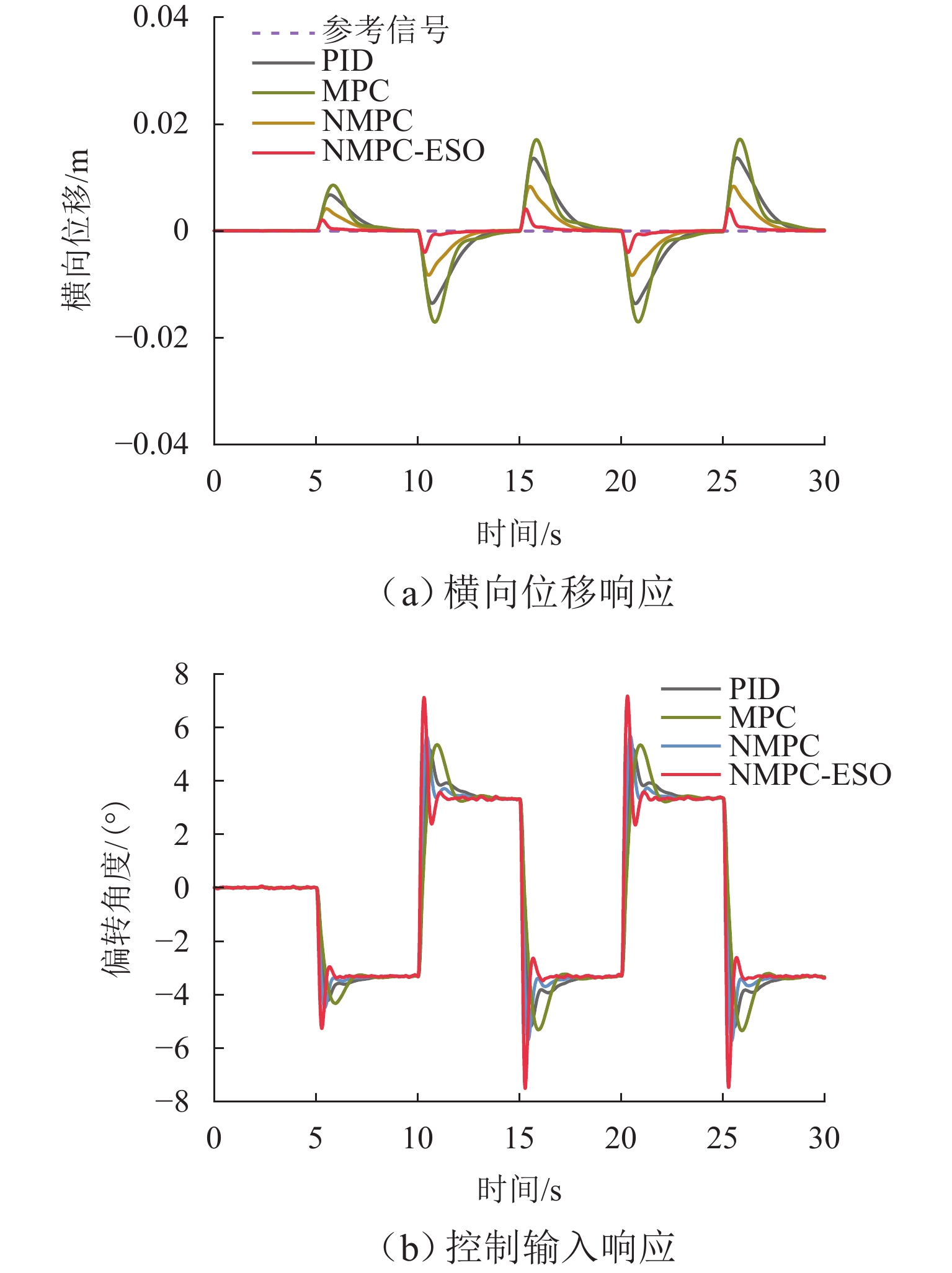
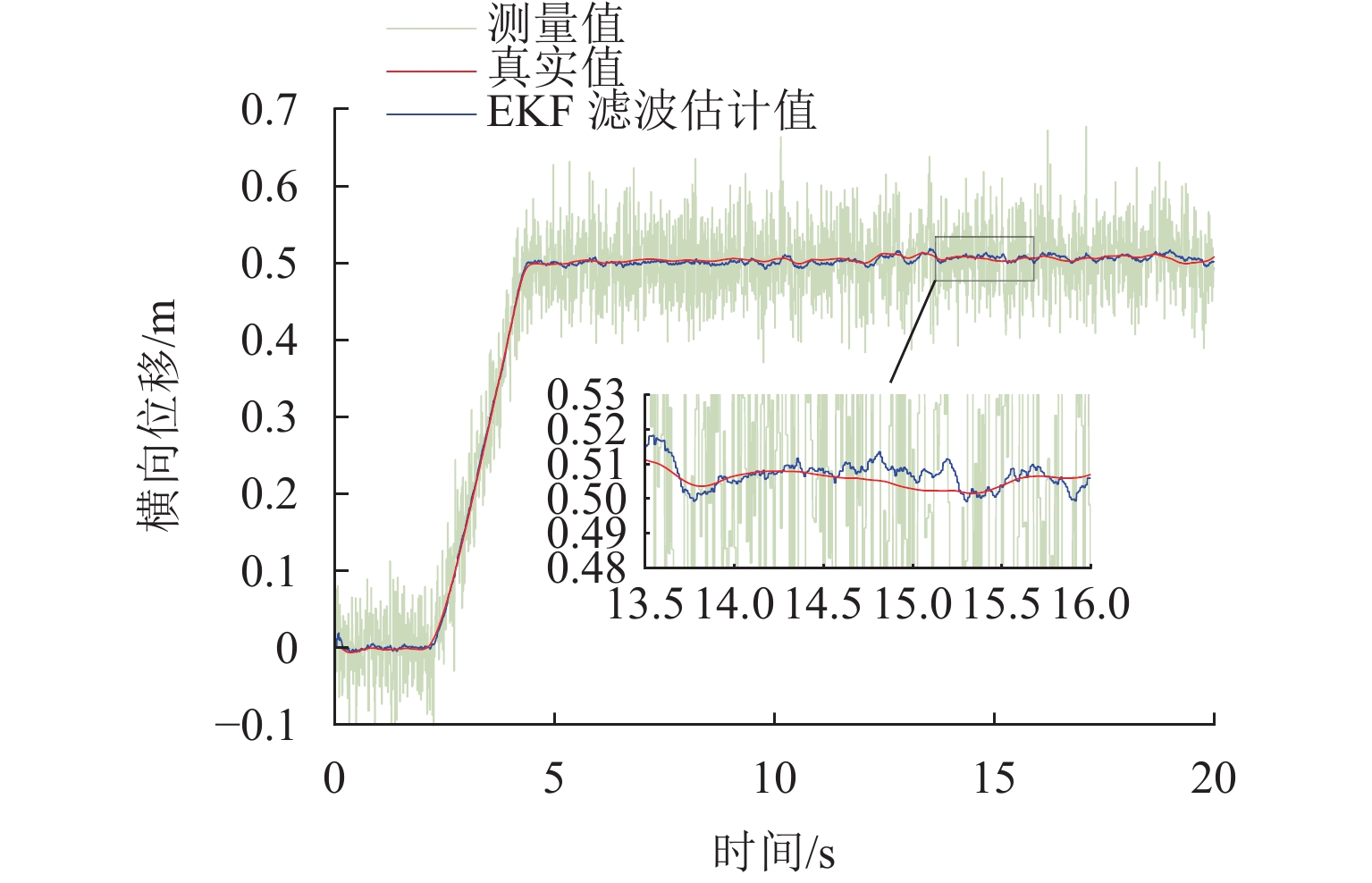
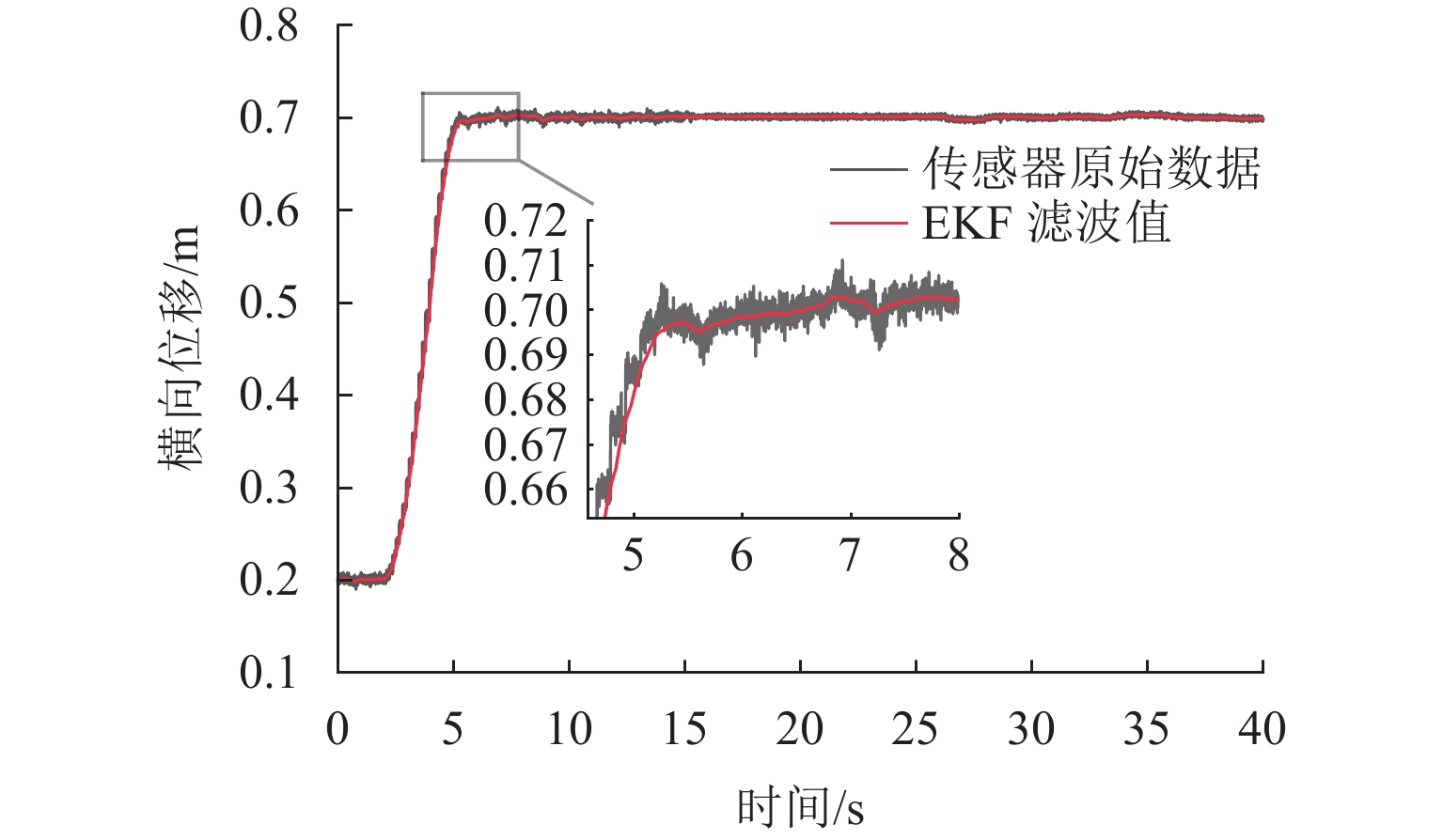
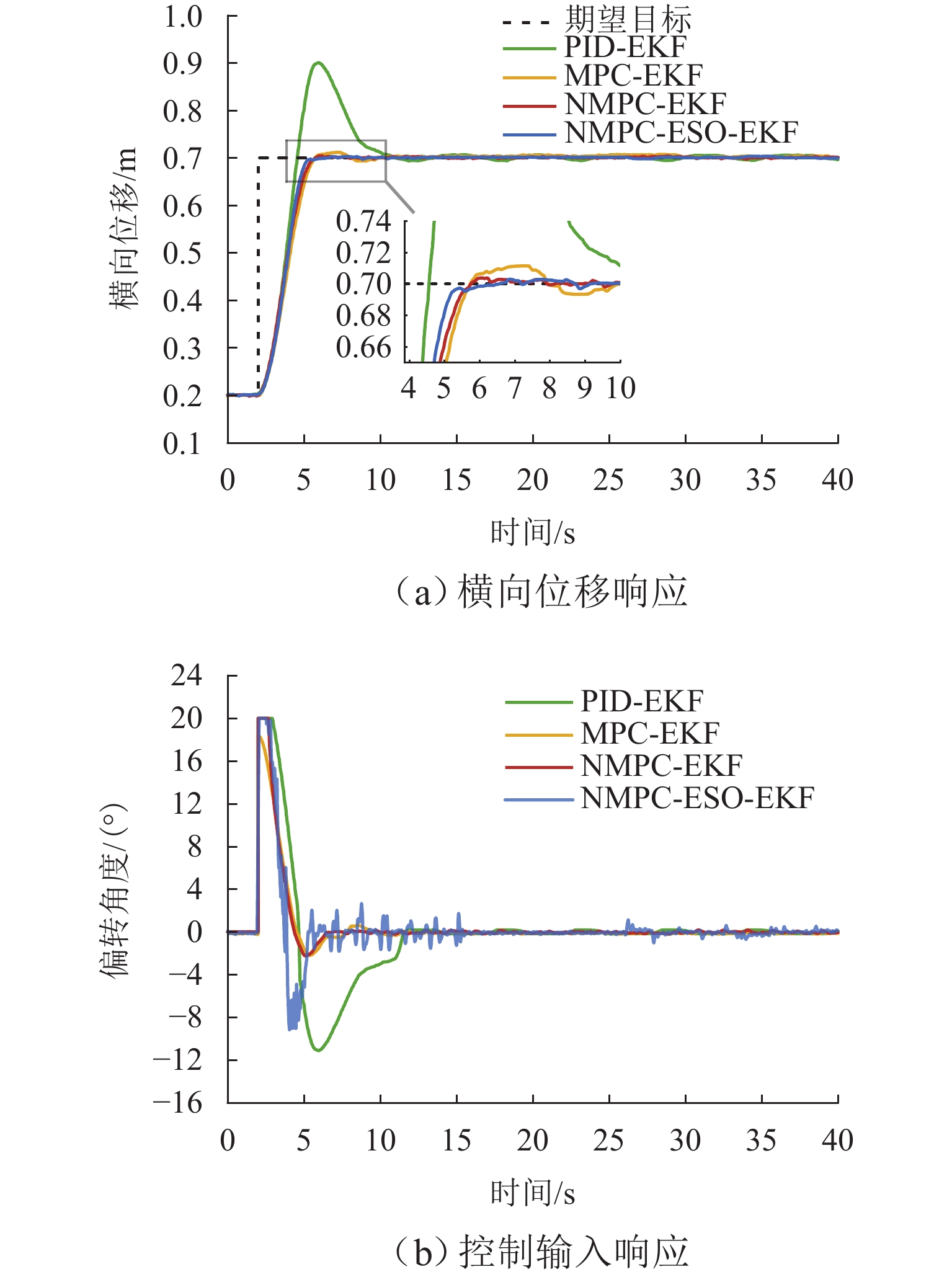
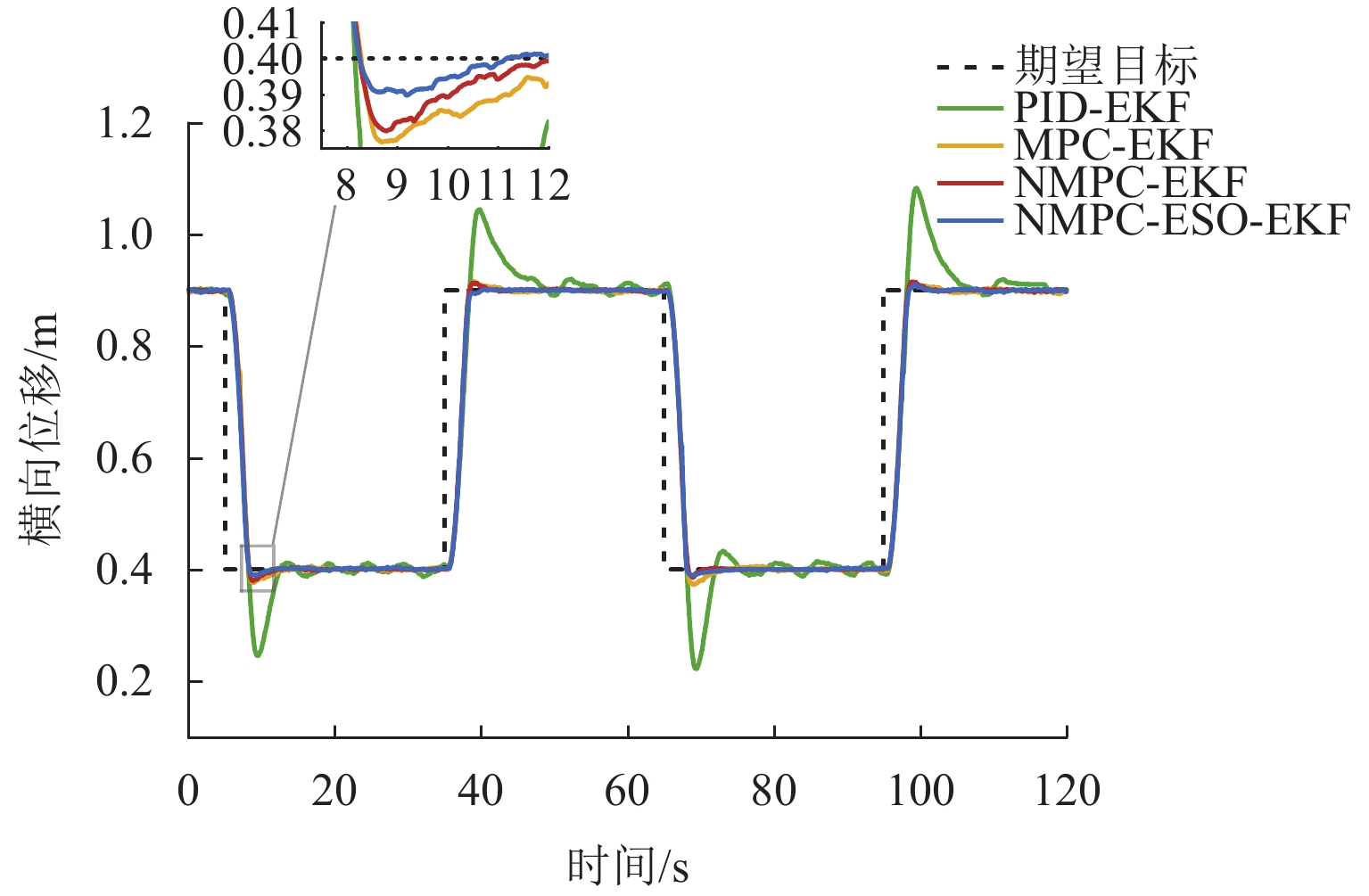
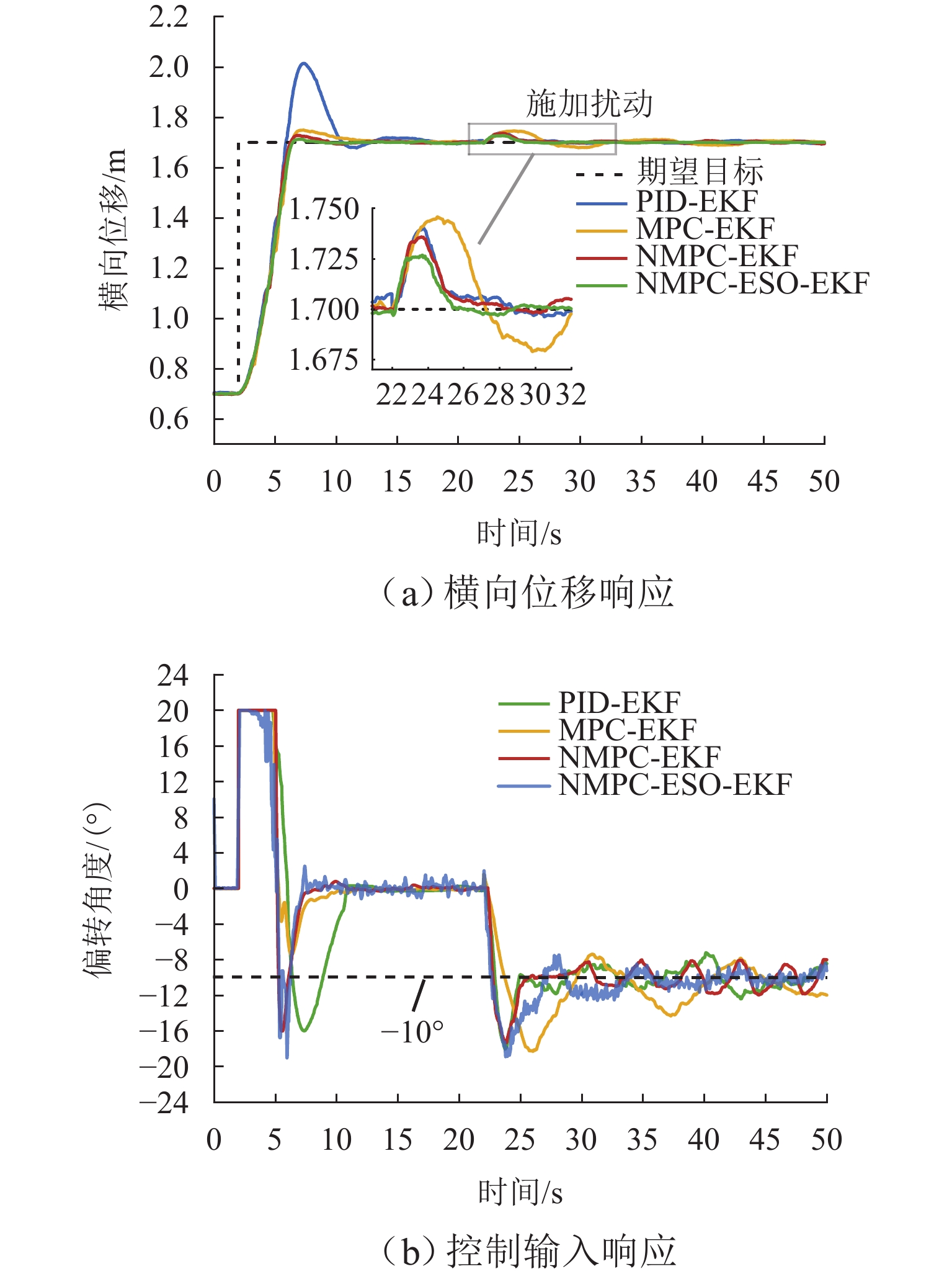
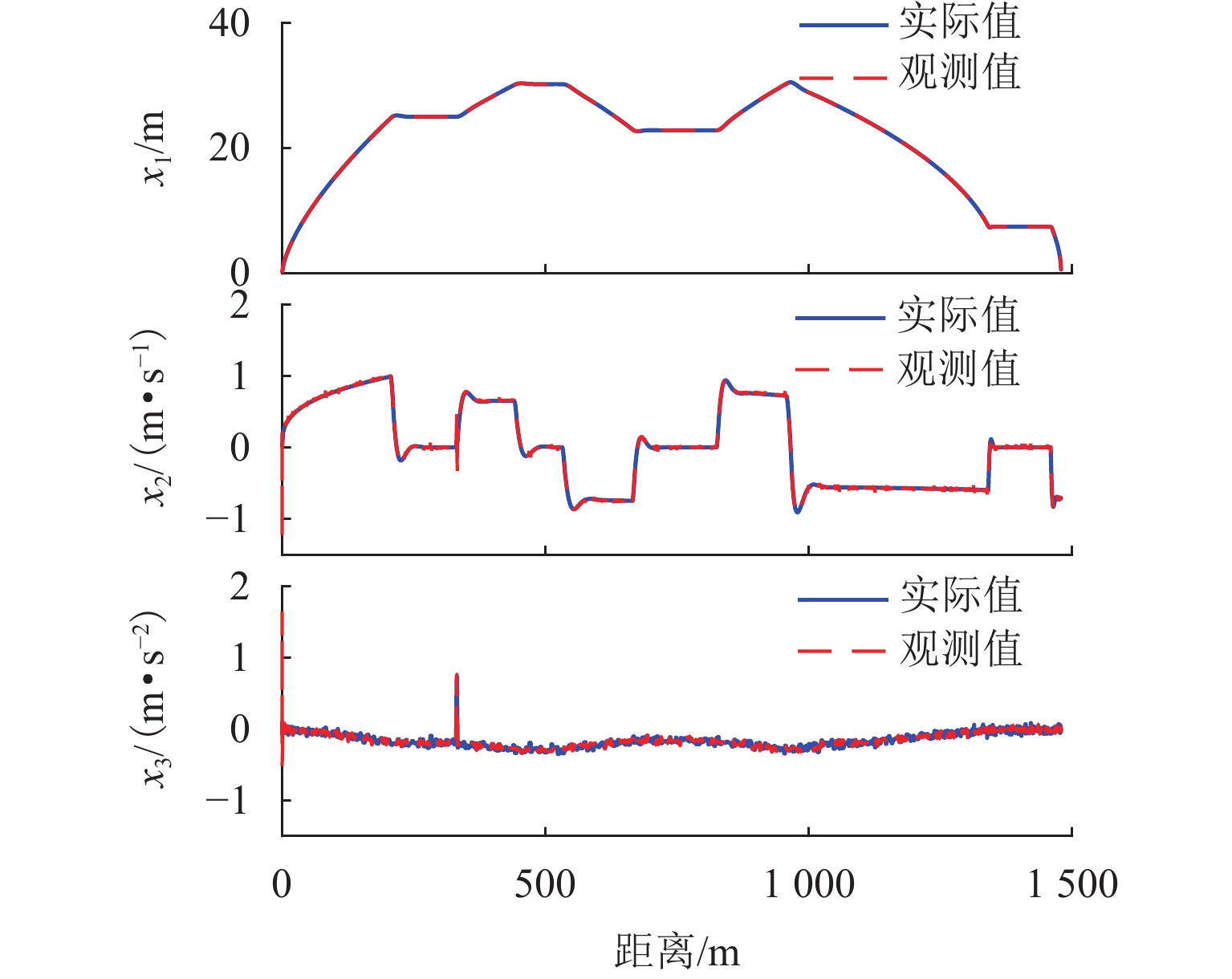
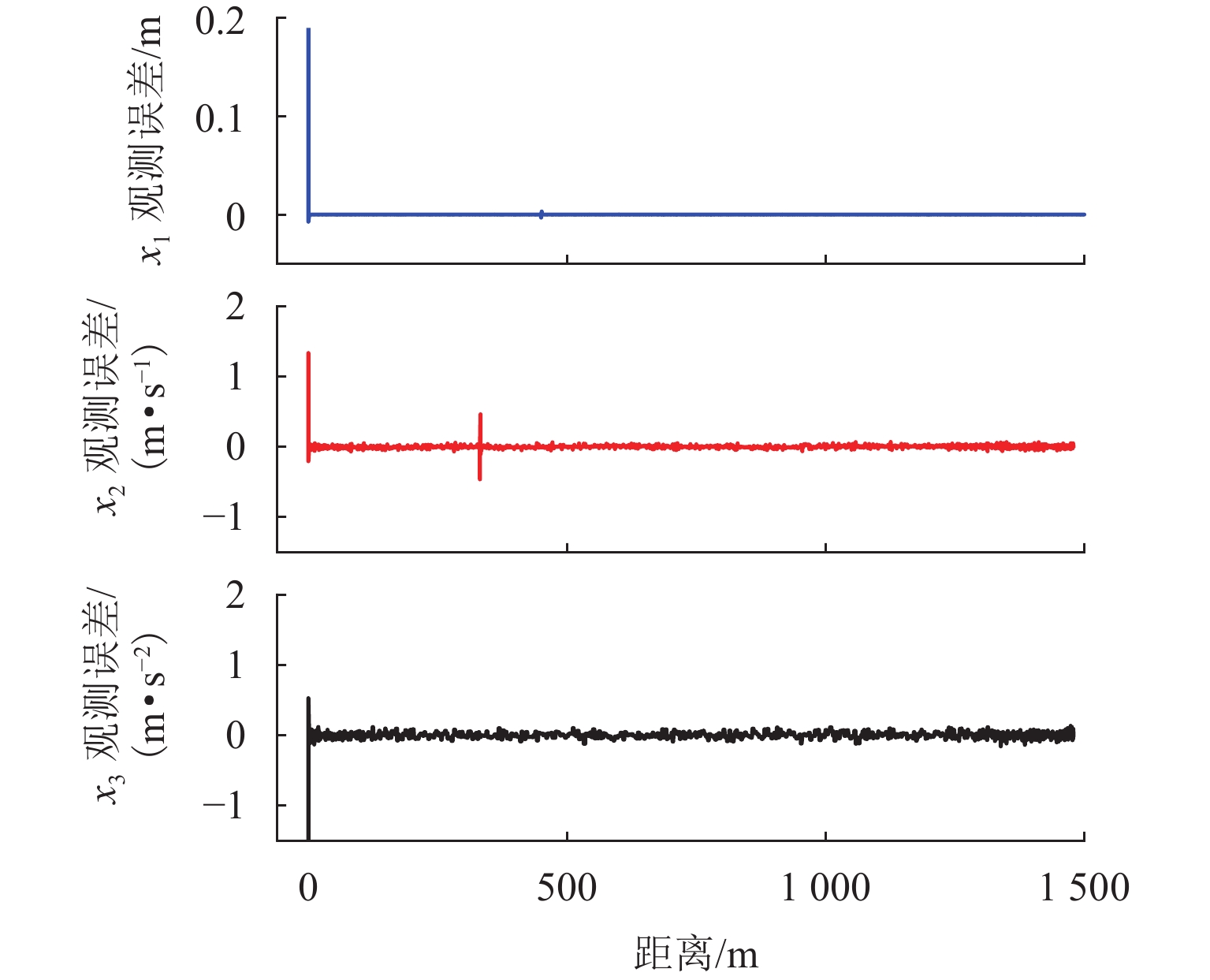
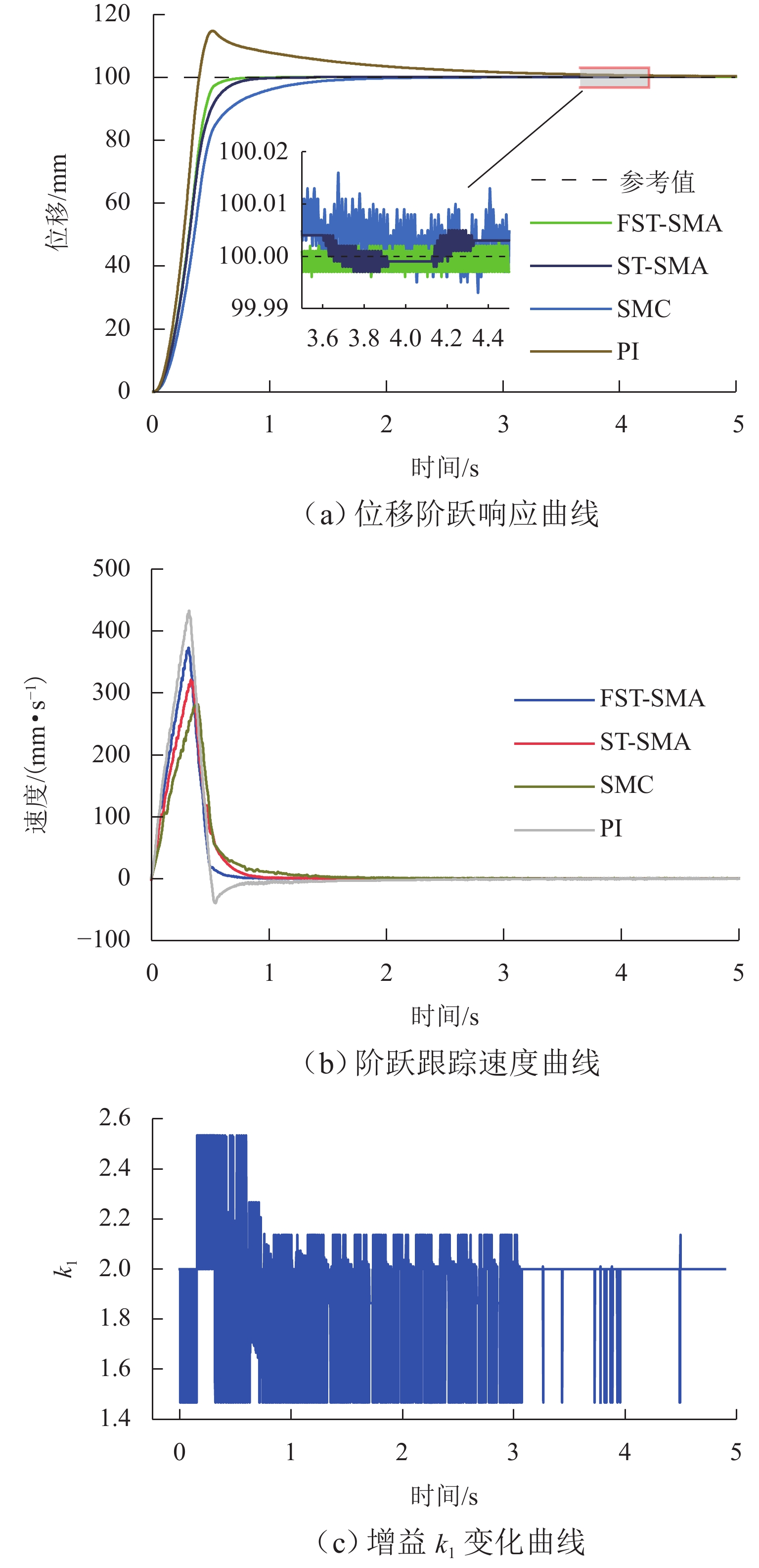
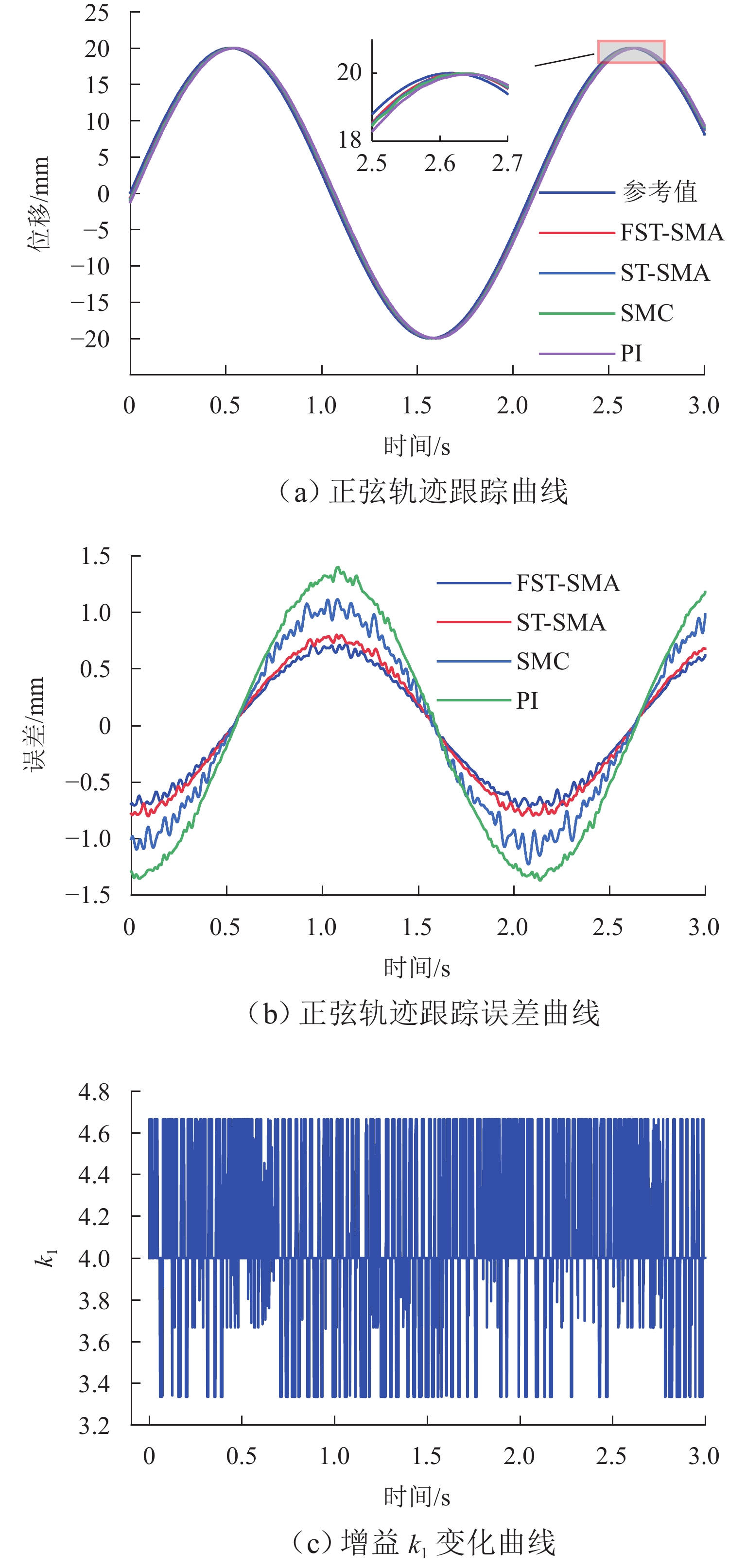
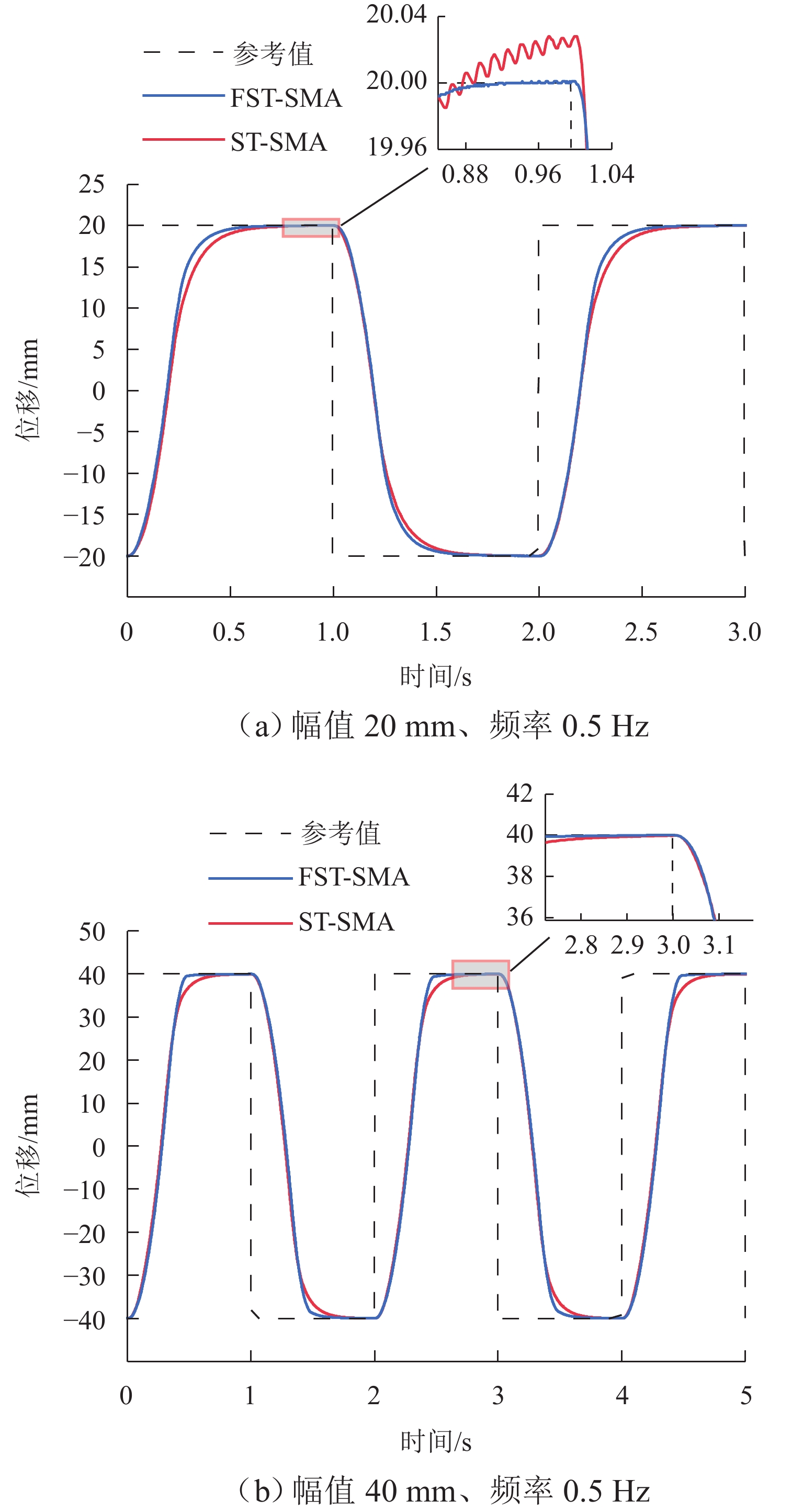
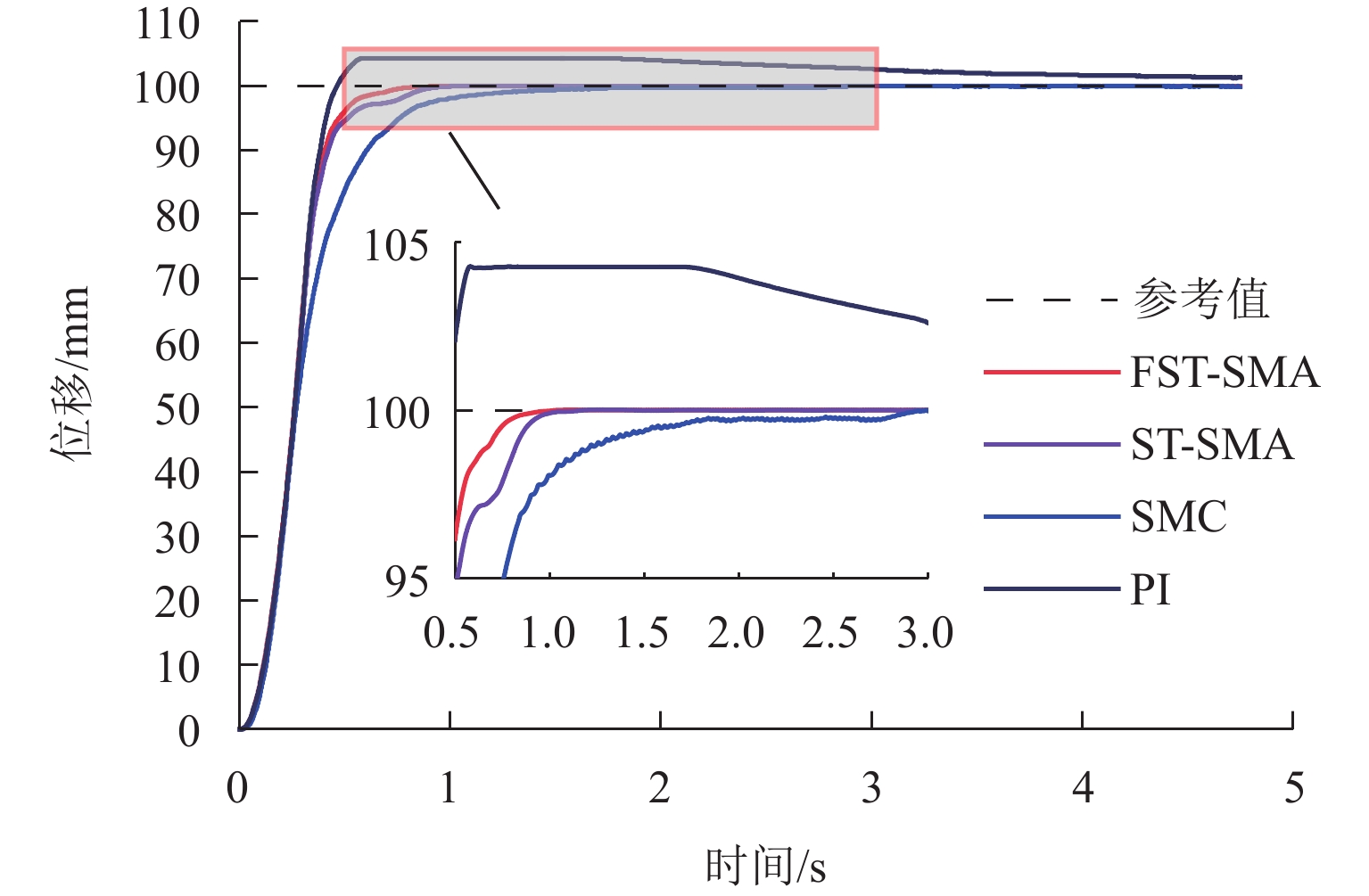
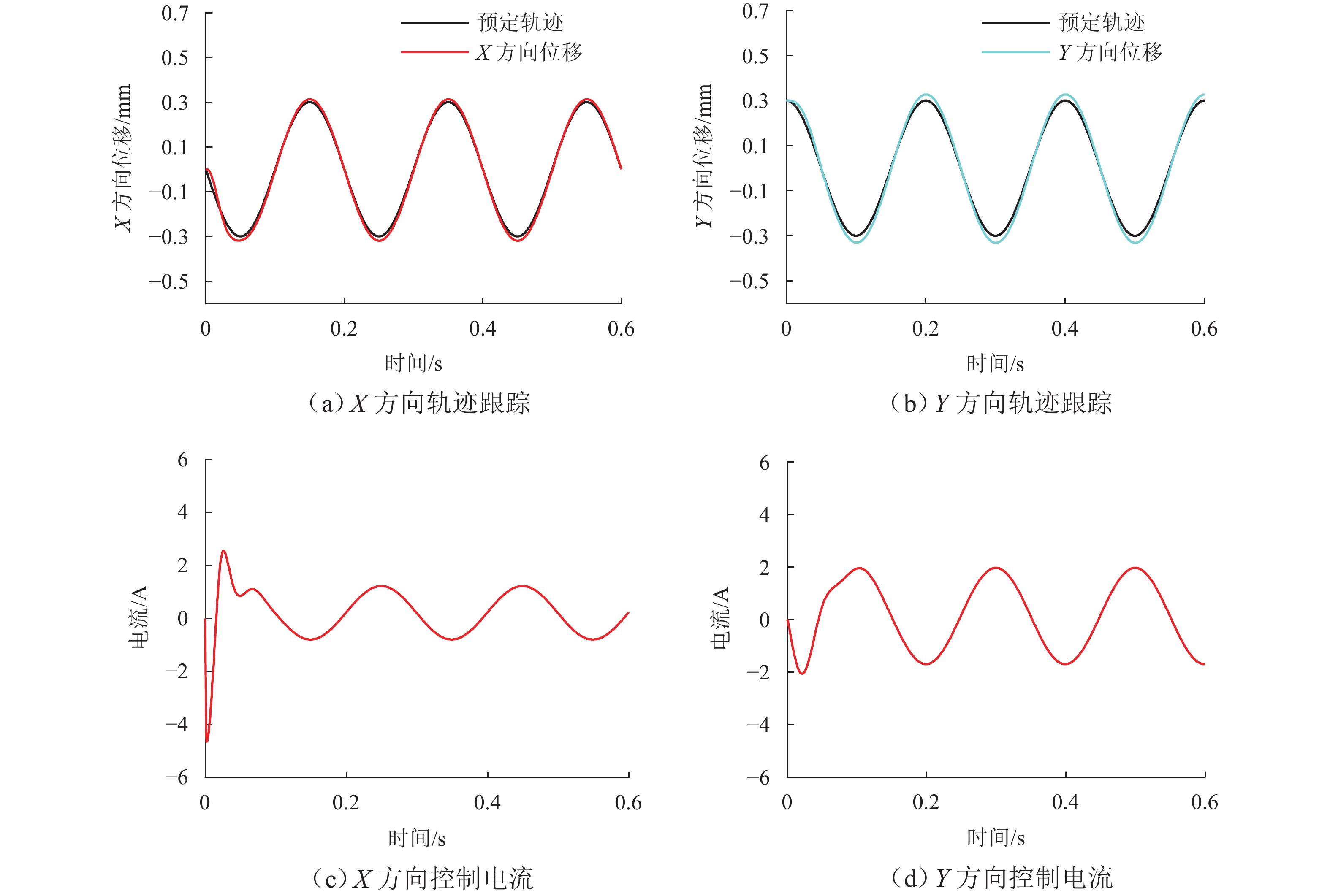
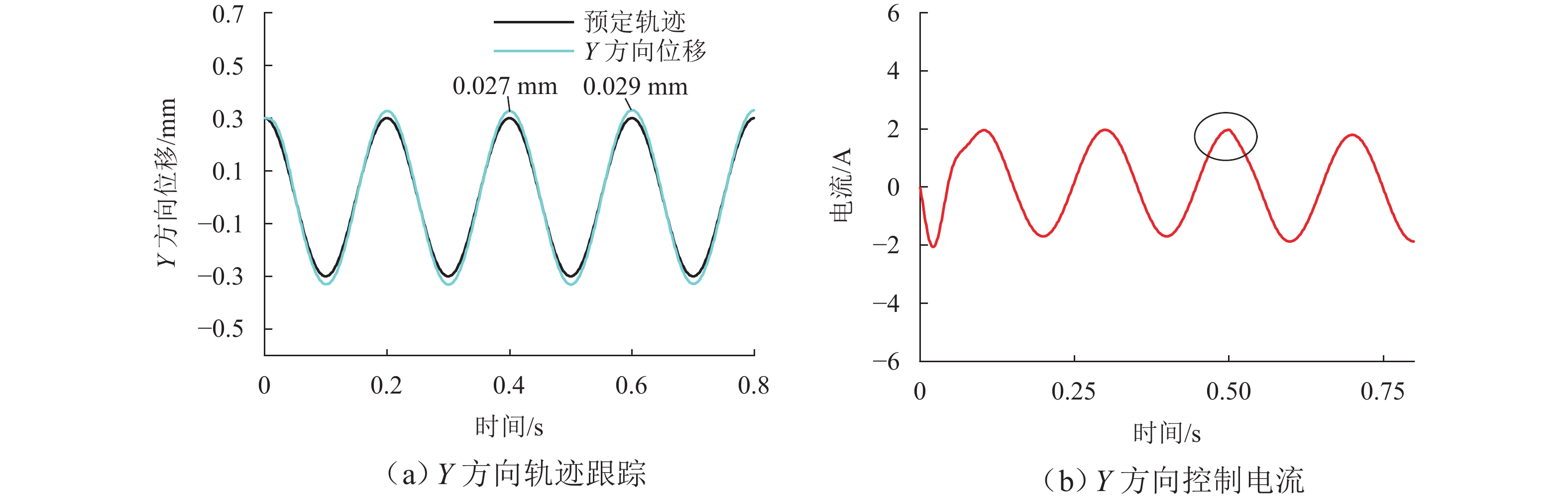
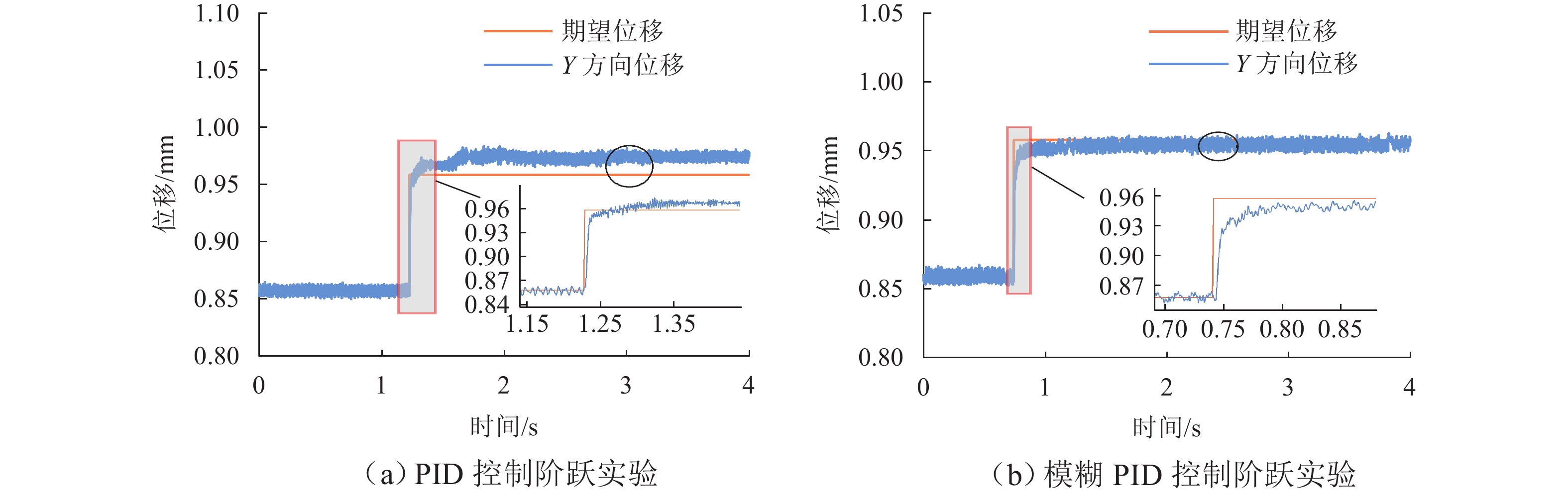
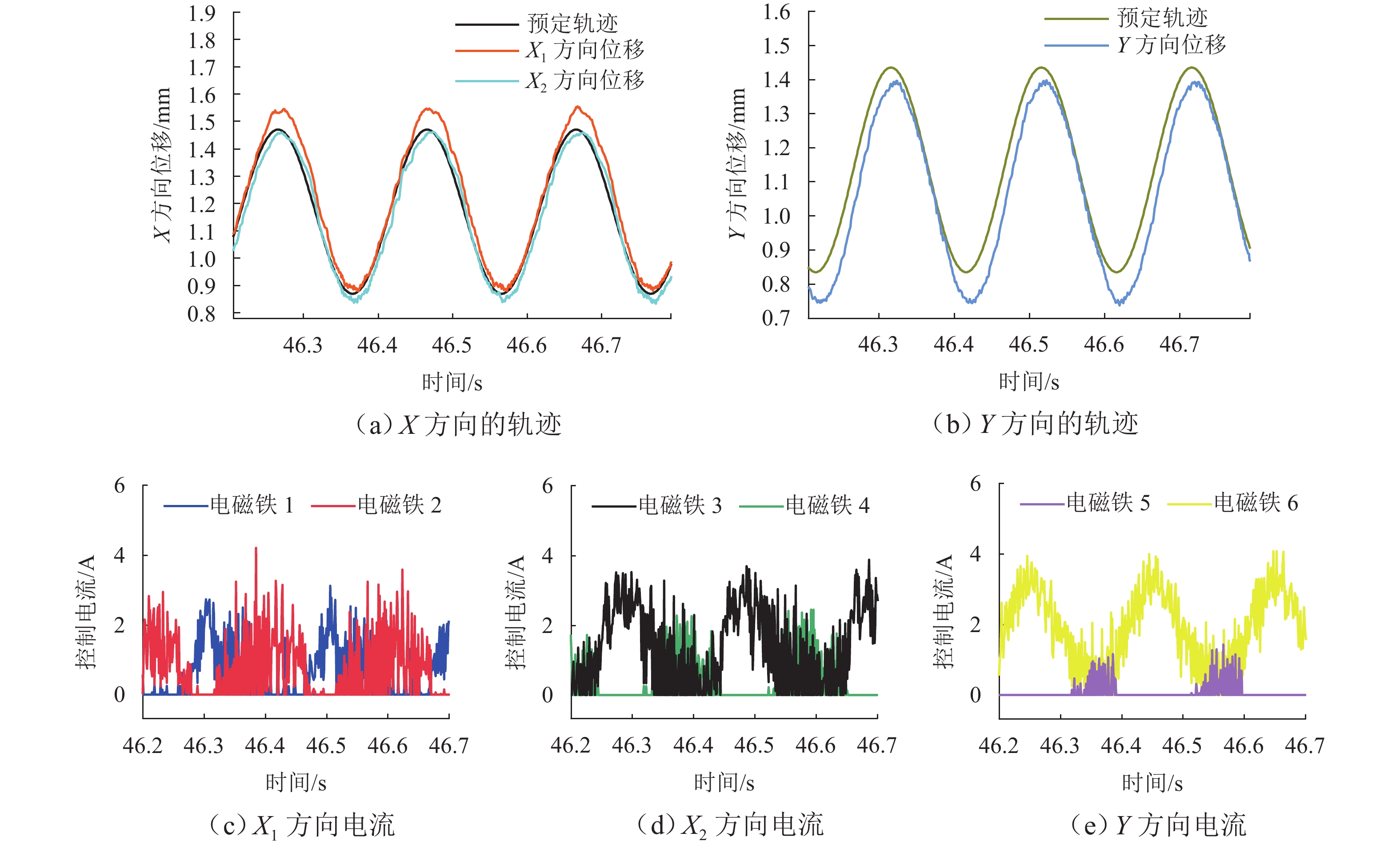
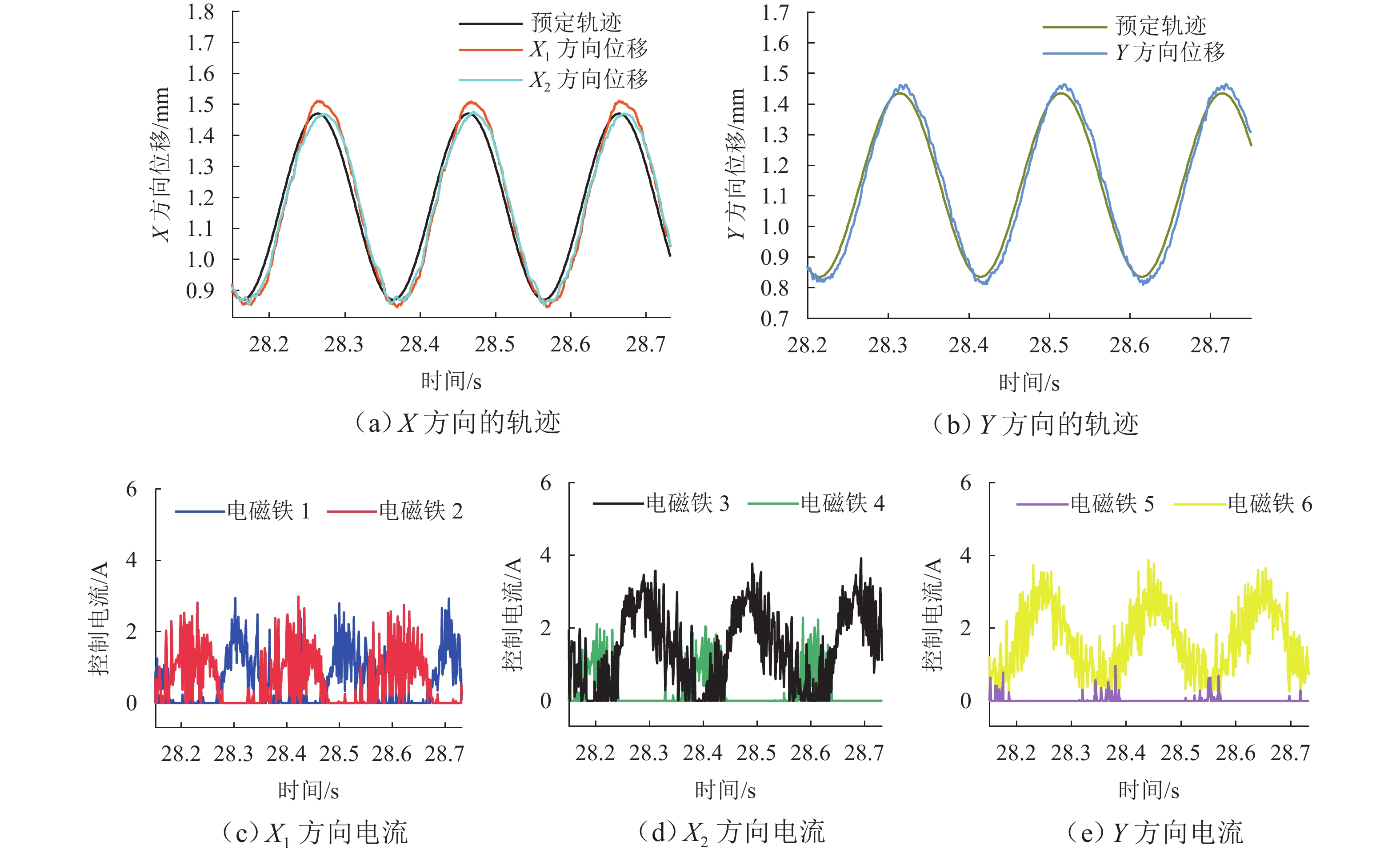
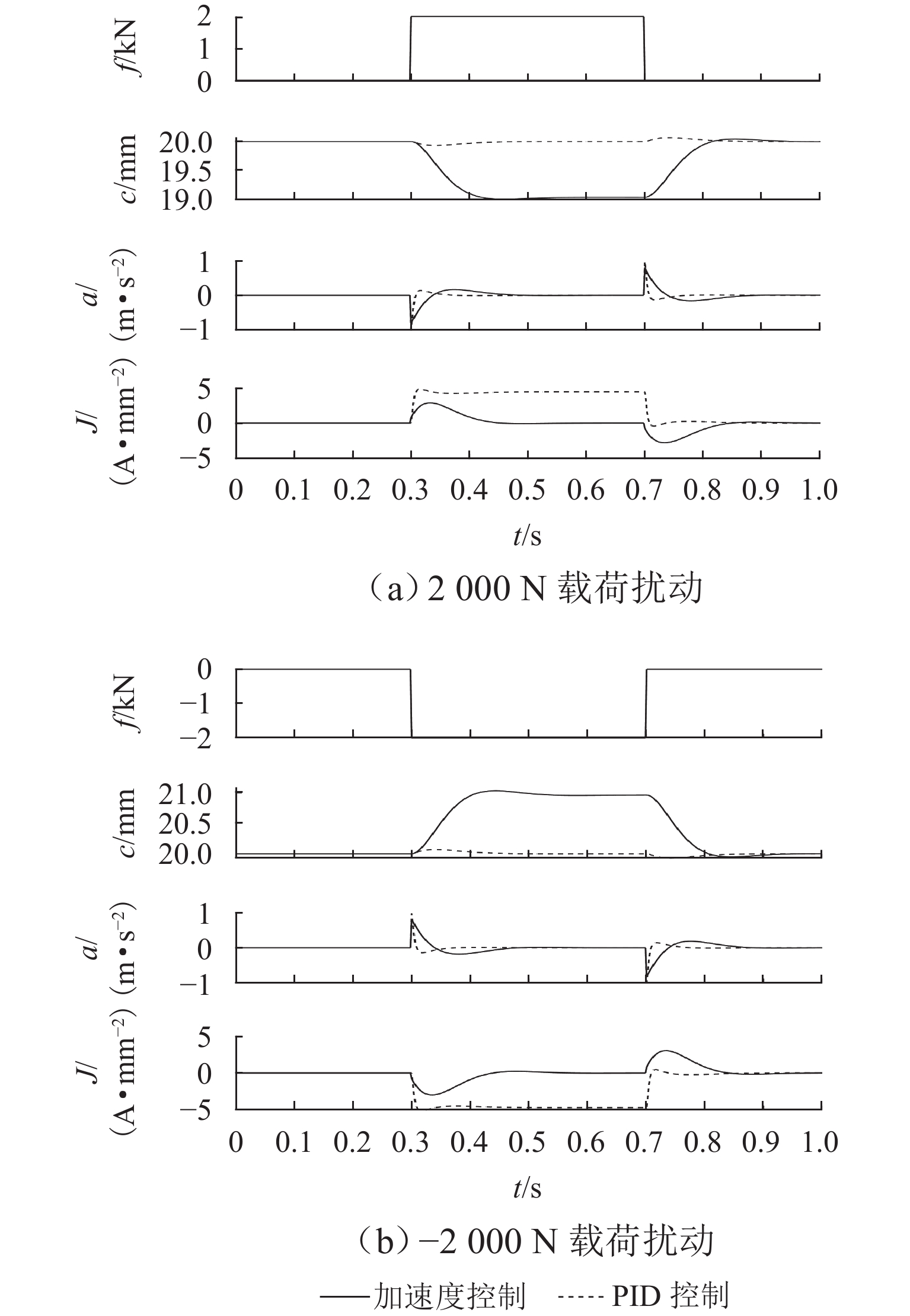
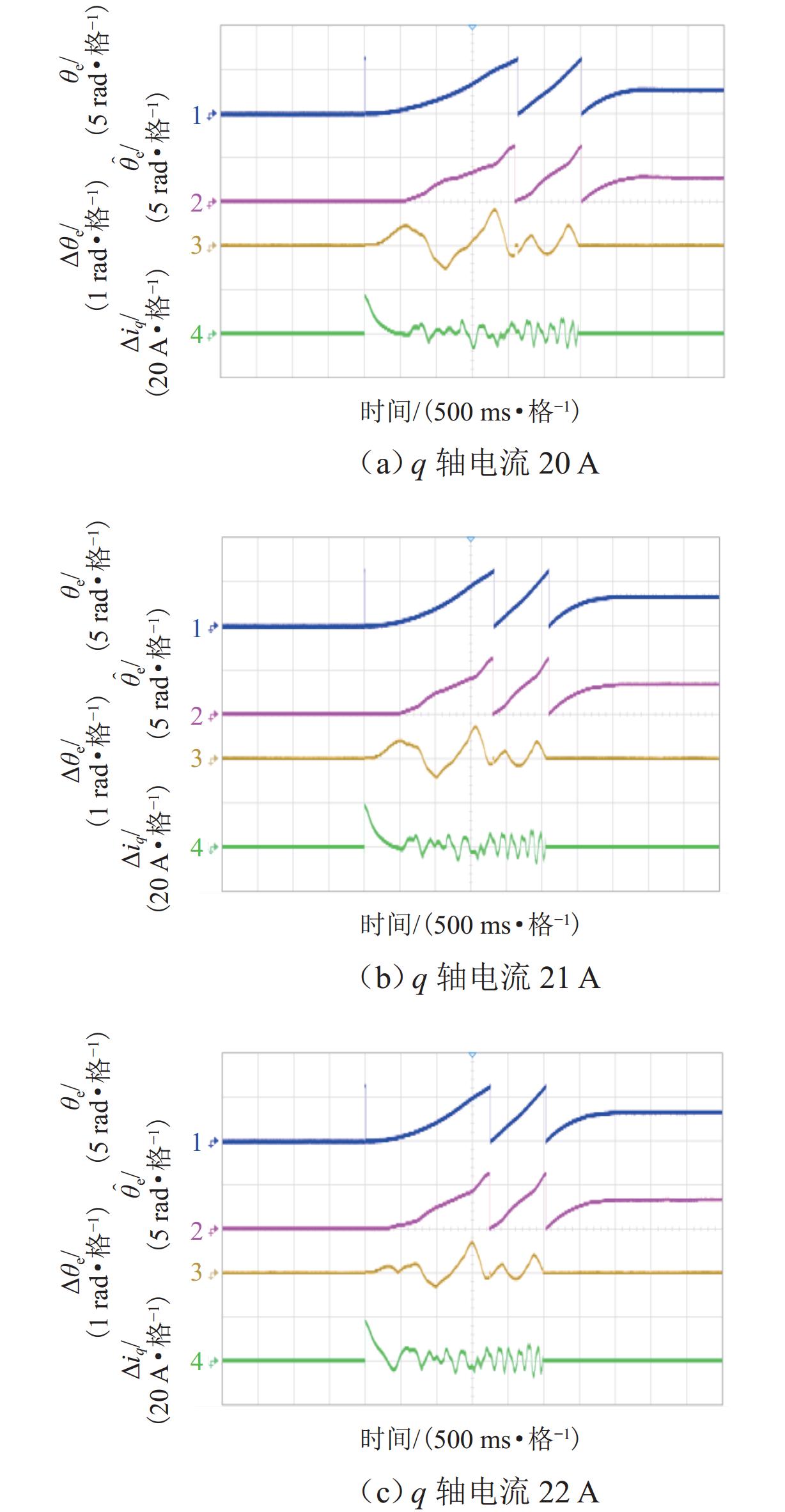
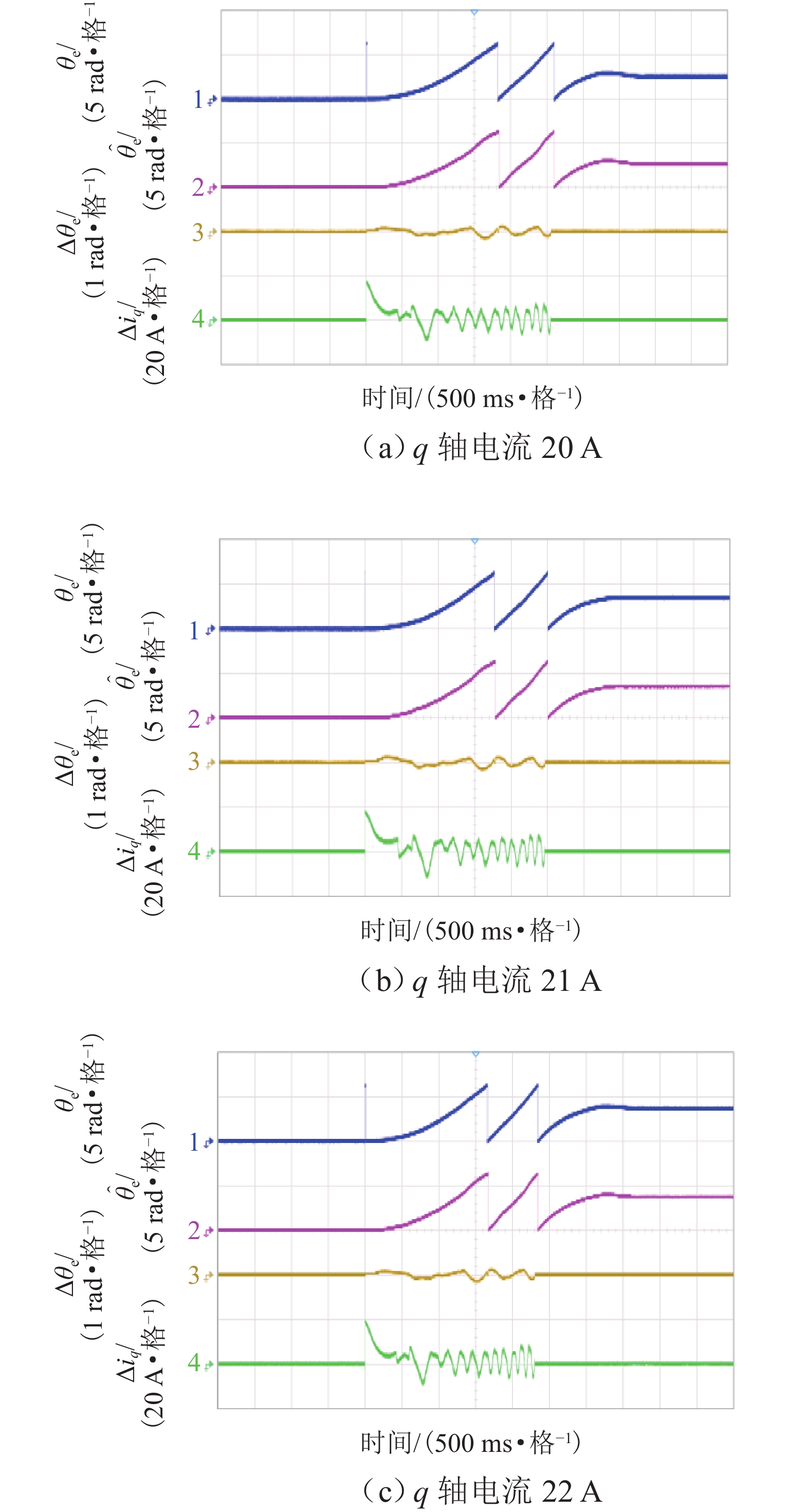
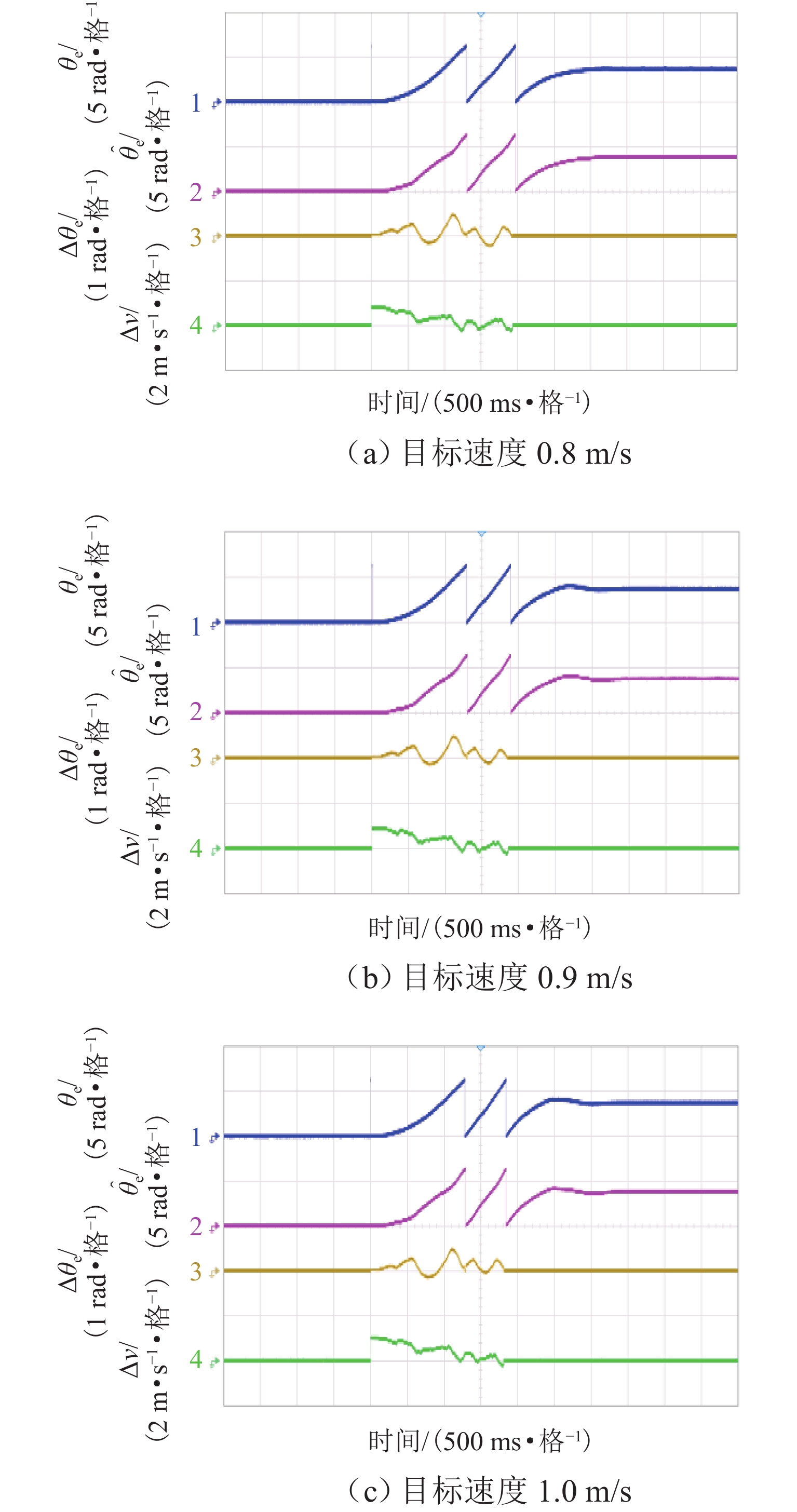
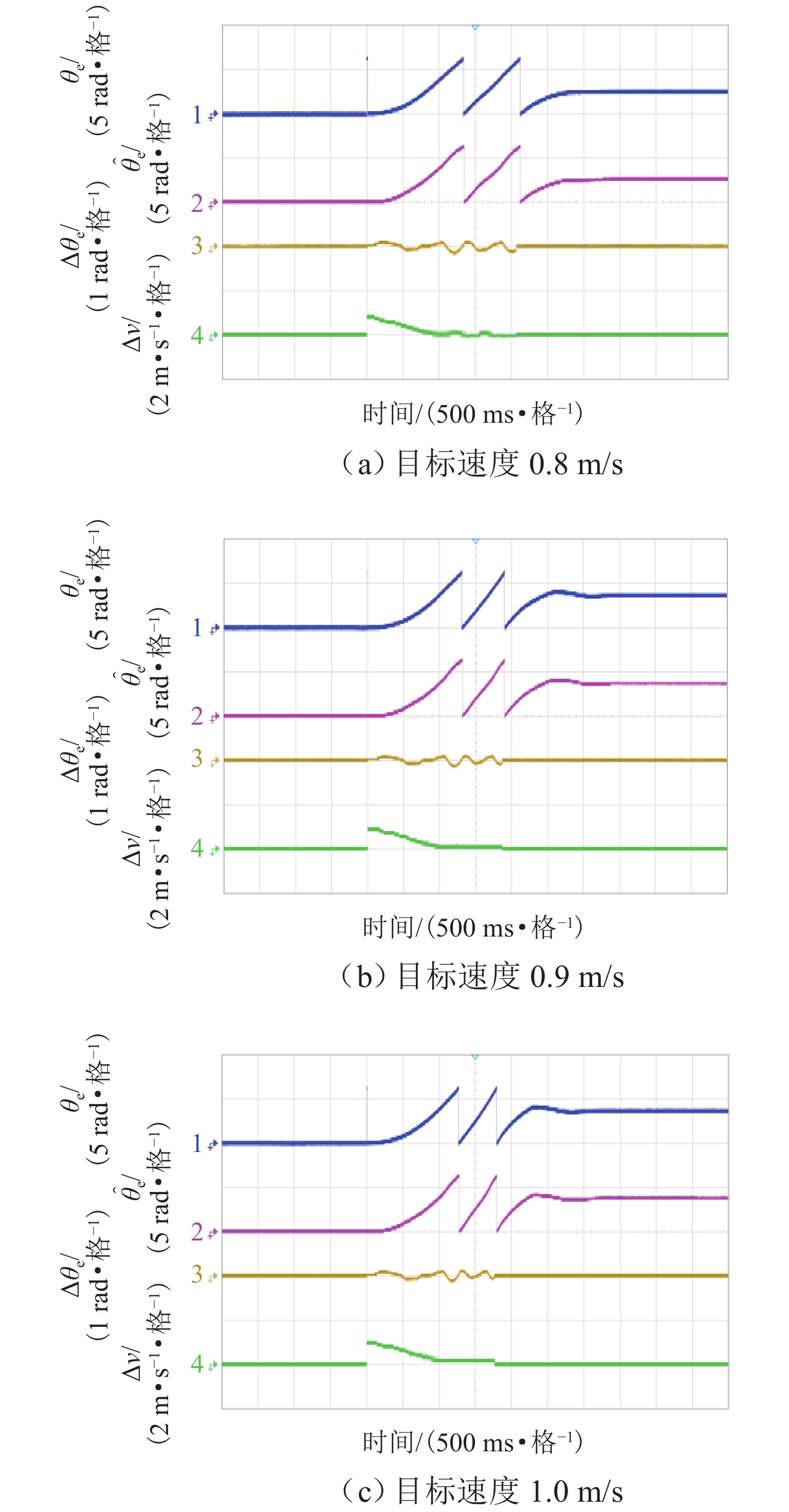
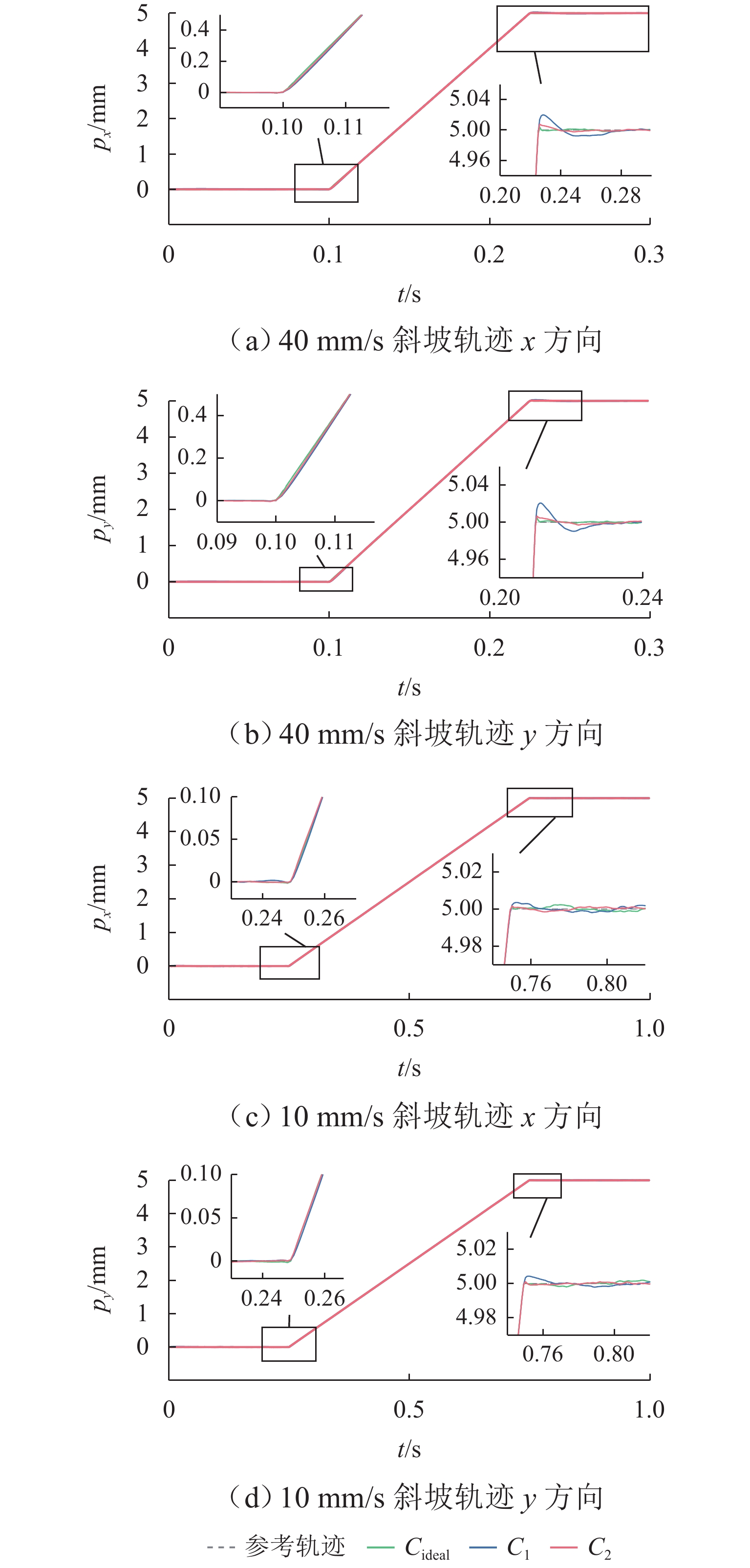
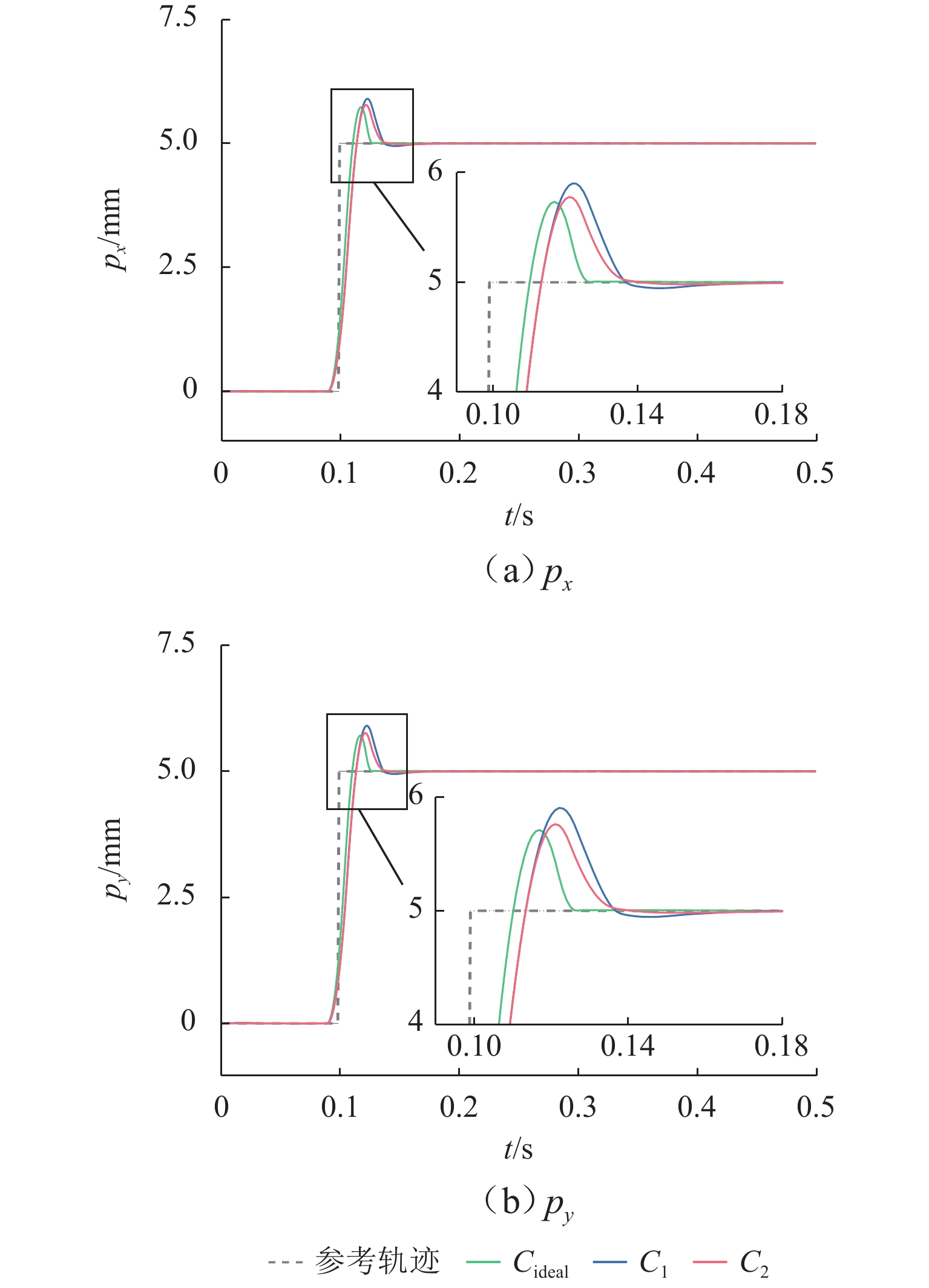
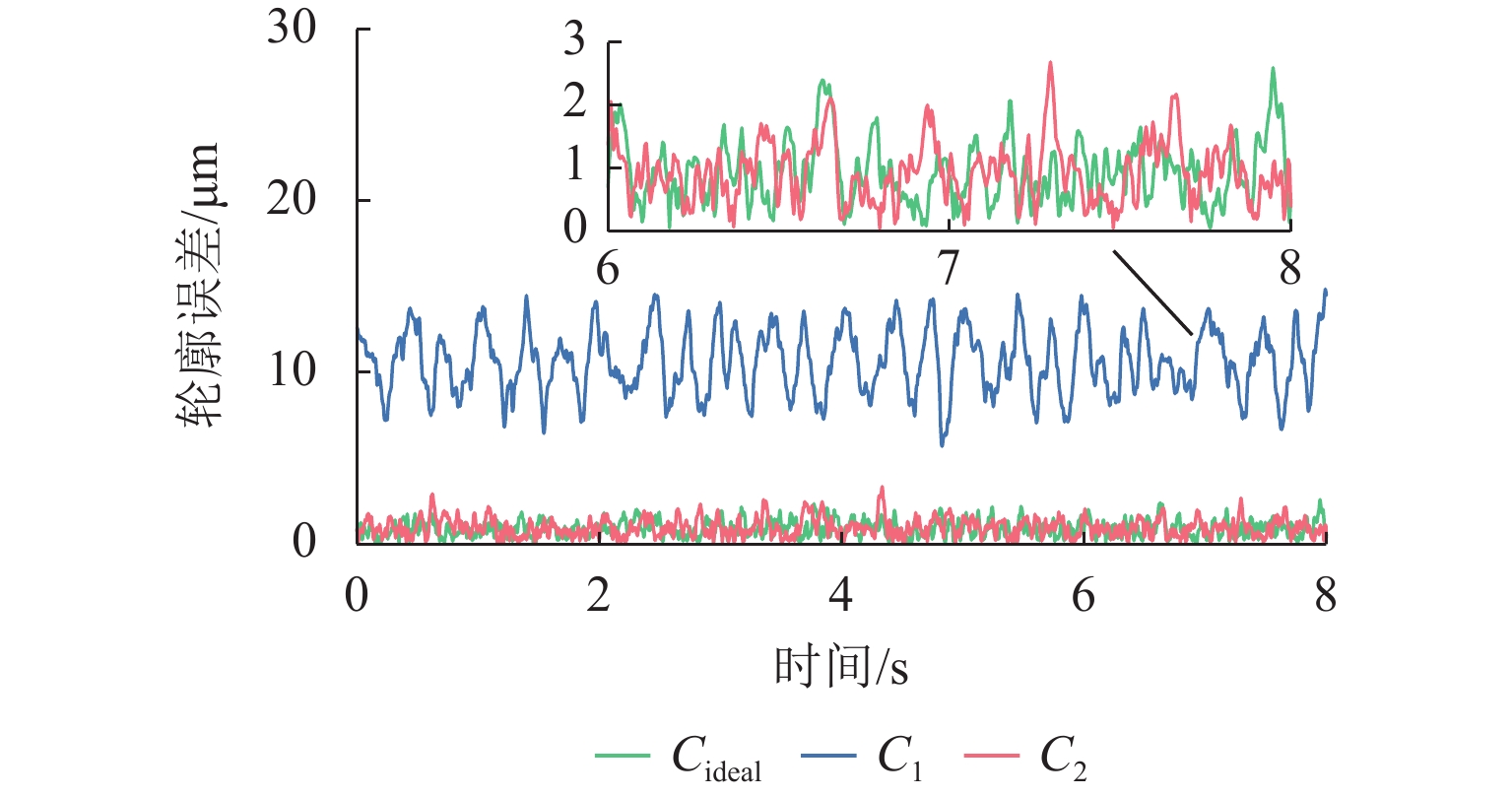
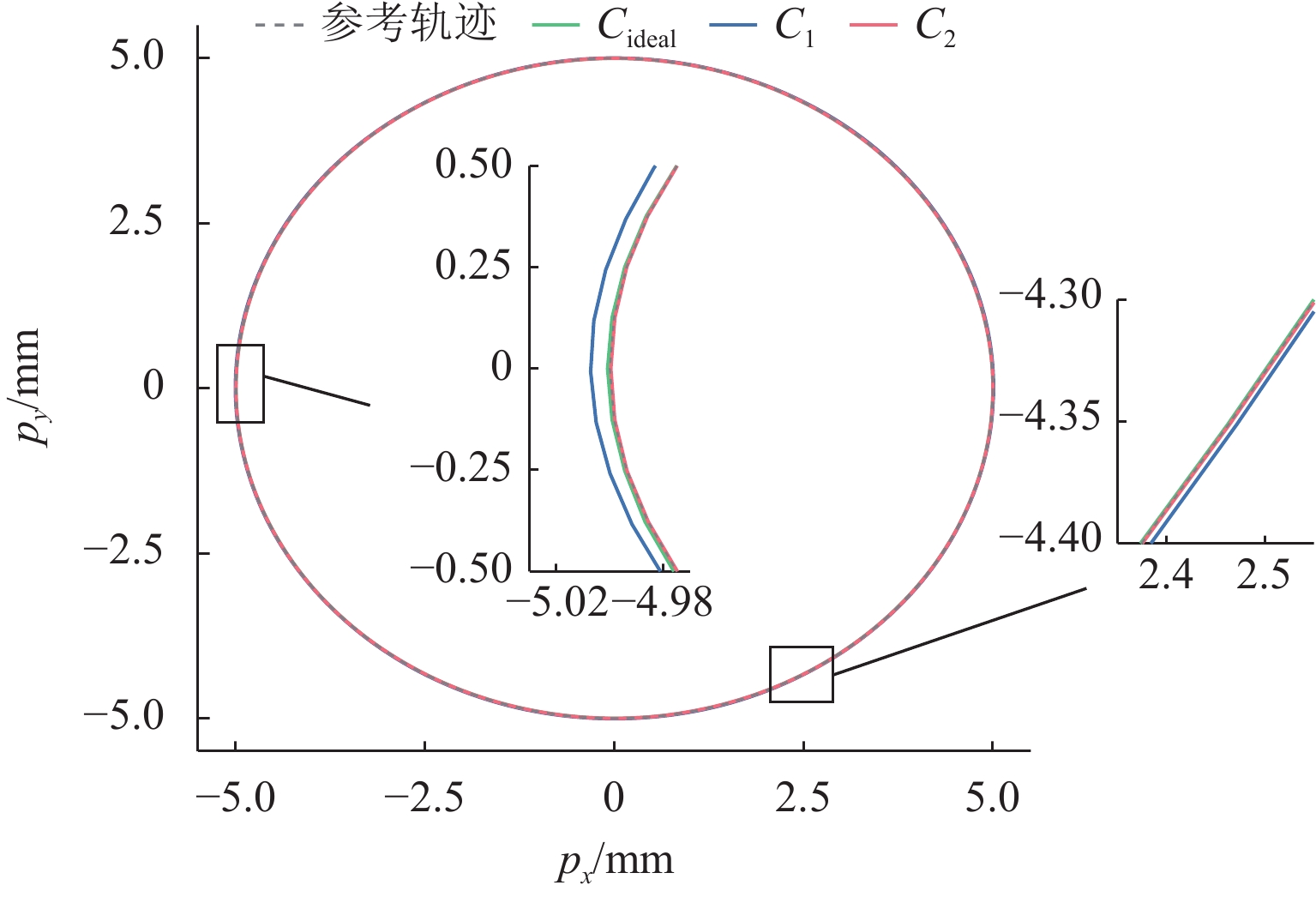
ResultsThe simulation results show that under the disturbance-free condition, the system can effectively realize the lateral trajectory tracking control function under PID, MPC, NMPC, and NMPC-ESO control strategies. The response speeds of the various controllers are relatively similar. The PID controller exhibits the largest overshoot, while MPC experiences some overshoot, though significantly smaller than that of PID. Both NMPC and NMPC-ESO have minimal overshoot, with their response curves closely resembling each other, indicating that ESO has no noticeable effect. Under external disturbance conditions, the addition of ESO significantly improves the anti-disturbance ability of NMPC. The lateral displacement fluctuations are minimal for NMPC-ESO, and the system recovery time is the shortest. When sensor measurement noise is introduced, the system can stably control within a range close to the target position under NMPC control, but there is still an error compared to the target position. Due to the excessive sensitivity of ESO to the noise, it overcompensates the deflection angle, leading to instability in the NMPC-ESO control after ESO’s application. To address this issue, an EKF is introduced to suppress the impact of internal noise on ESO’s disturbance estimation. Under both internal and external disturbance conditions, NMPC-ESO-EKF significantly improves the lateral trajectory tracking accuracy by 89.77% and greatly enhances the anti-disturbance ability, demonstrating the necessity of incorporating EKF. The experimental results indicate that the error between the values filtered by EKF and the true values is very small. PID-EKF exhibits significant overshoot and oscillation under various operating conditions, which poses safety concerns in practical engineering applications. Under short-distance constant reference signals, compared to PID-EKF control, NMPC-ESO-EKF reduces the overshoot by 98.90% to 2.12 mm, with the shortest system settling time of 4.7 s, which is reduced by 47.78%. Under square wave reference signals, the trajectory tracking curves of MPC-EKF, NMPC-EKF, and NMPC-ESO-EKF are all relatively stable, with NMPC-ESO-EKF showing the smallest average overshoot and tracking error, improving performance by 93.77% and 36.13%, respectively, compared to PID-EKF. Under long-distance constant reference signals, larger overshoots are observed across all controllers. After applying continuous disturbances, each controller can make the system return to the stable target value. After stabilization, the input deflection angle fluctuates around −10° to continuously resist external disturbance; the displacement fluctuation amplitude of MPC-EKF is the largest, with the longest recovery time; the anti-disturbance ability of NMPC-ESO-EKF is optimal, with the fluctuation amplitude reduced by 34.51% and the recovery time shortened by 42.08% compared to PID-EKF.
ConclusionThe PMEDS vehicle, under the improved nonlinear model predictive control method, has enhanced its lateral stability and possesses the basic functionality of flexible lateral movement. It is suitable for scenarios such as lateral anti-disturbance during normal driving, active lane change, lateral hill climbing, and parallel parking. Up to now, significant breakthroughs have been achieved in areas such as the optimization of electromagnetic forces of magnetic wheels, structural design of vehicles, and single-degree-of-freedom control research. However, it is still in the theoretical research stage. In order to realize engineering applications as soon as possible, future efforts will focus on intelligent system perception, path planning, and multi-degree-of-freedom coupling trajectory tracking control research.


 Advance Search
Advance Search
 Email alert
Email alert RSS
RSS [Abstract]
[Abstract] [FullText HTML]
[FullText HTML] PDF 3718KB
PDF 3718KB Supplements
Supplements [Cited By]
[Cited By]