- ISSN 0258-2724
- CN 51-1277/U
- EI Compendex
- Scopus
- Indexed by Core Journals of China, Chinese S&T Journal Citation Reports
- Chinese S&T Journal Citation Reports
- Chinese Science Citation Database

| Citation: | SUN Yougang, ZHANG Dandan, JI Wen, XU Junqi. Fuzzy Compensation-Based Non-Singular Terminal Sliding Mode Control of Maglev Vehicle Levitation System[J]. Journal of Southwest Jiaotong University, 2025, 60(4): 803-811. doi: 10.3969/j.issn.0258-2724.20240499

|
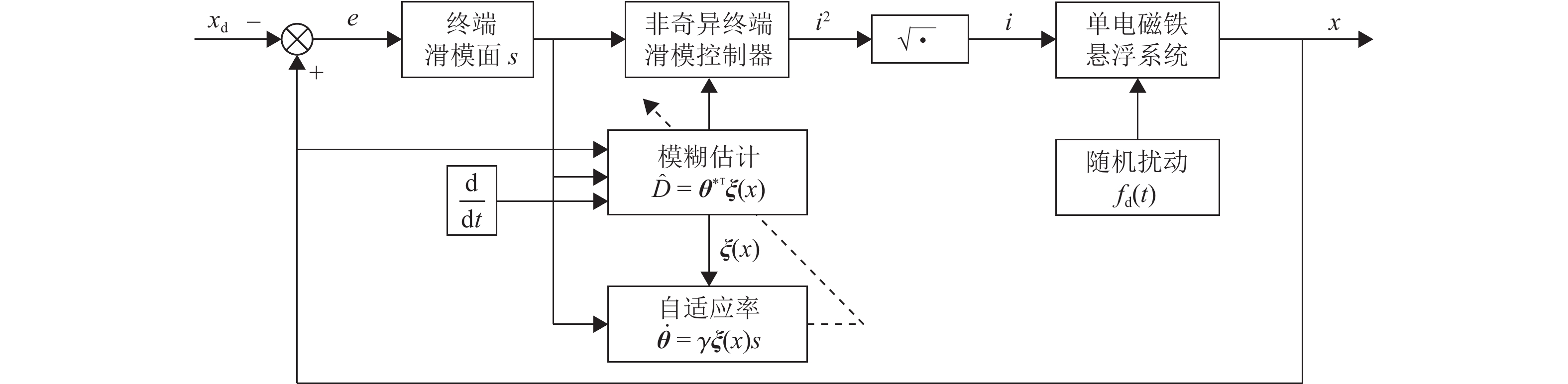
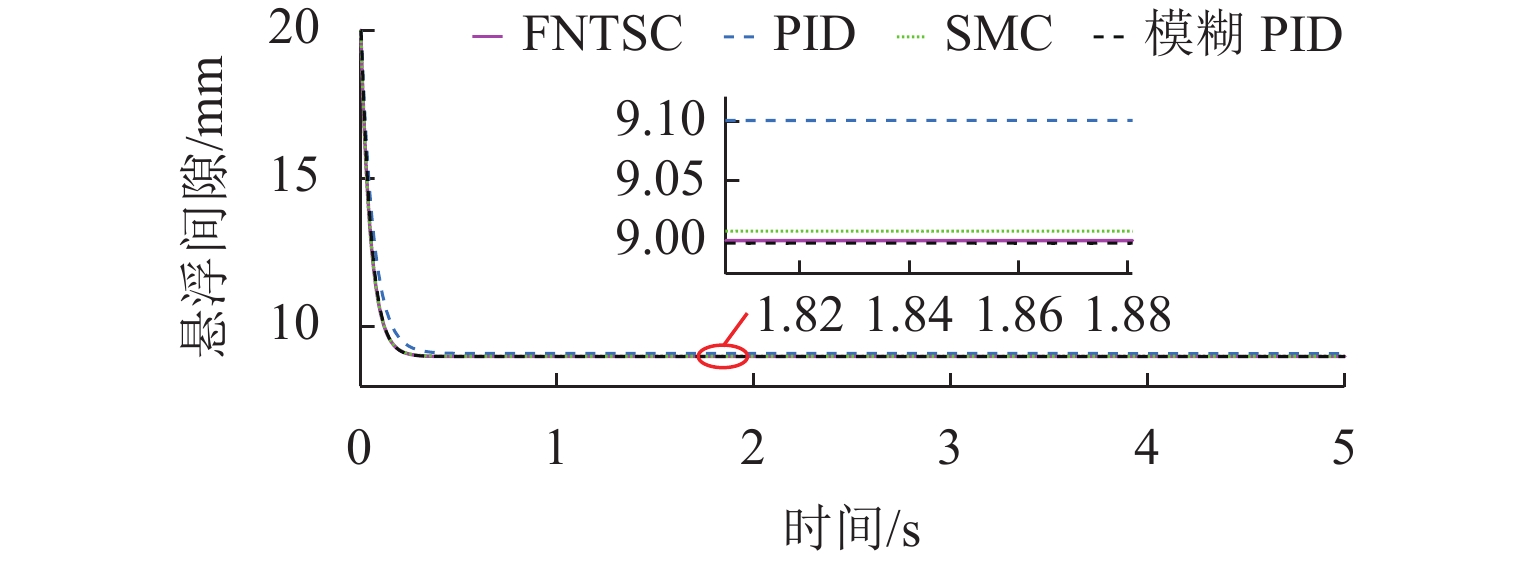
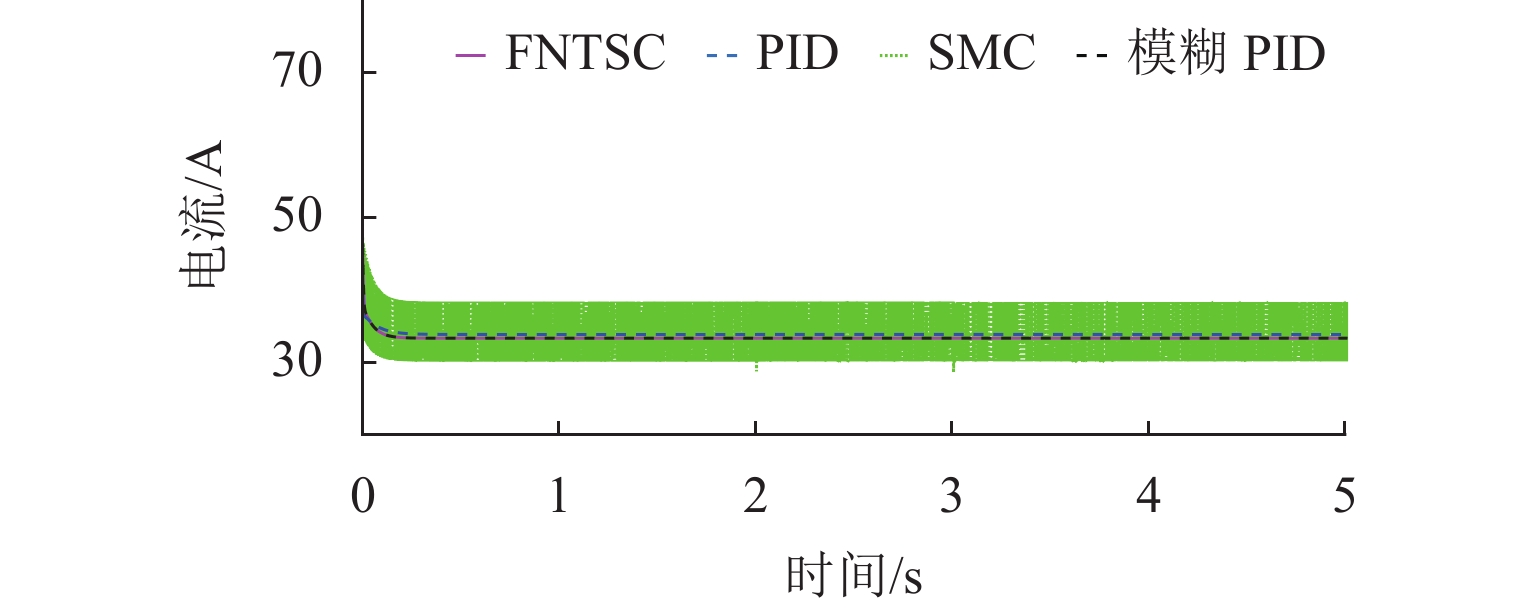
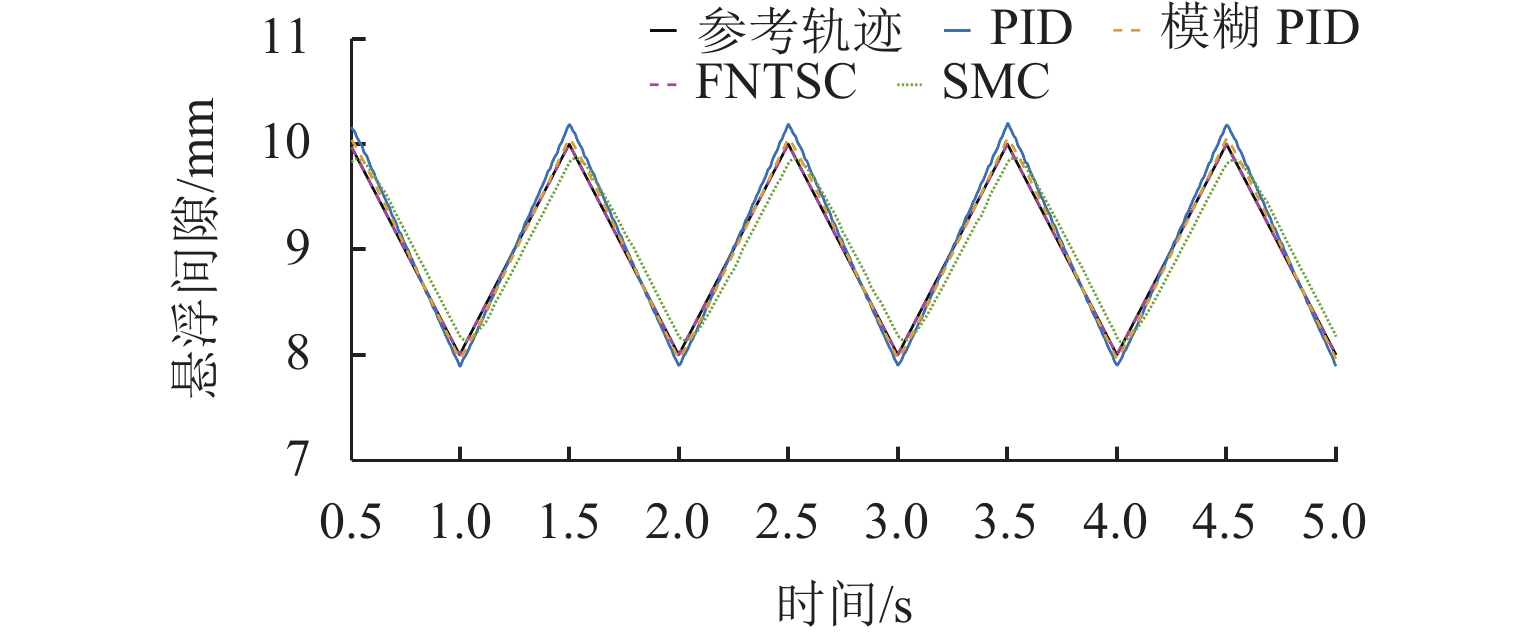
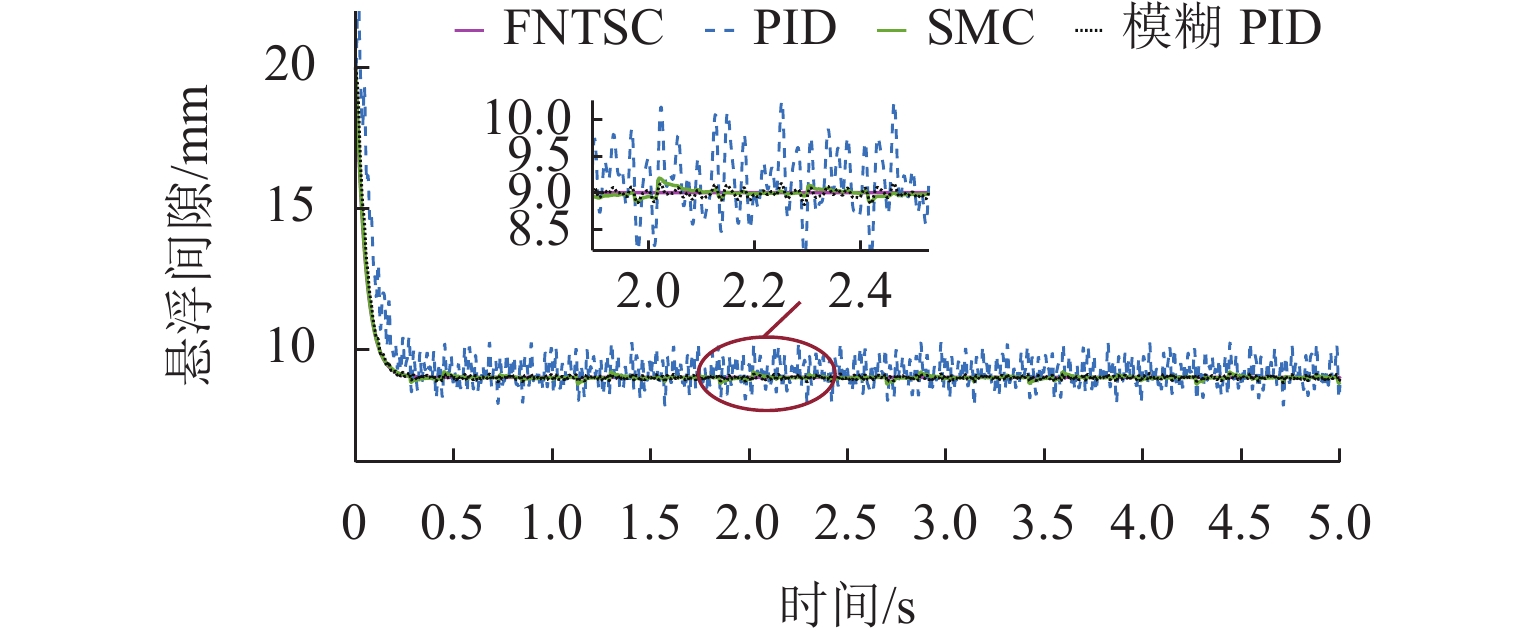
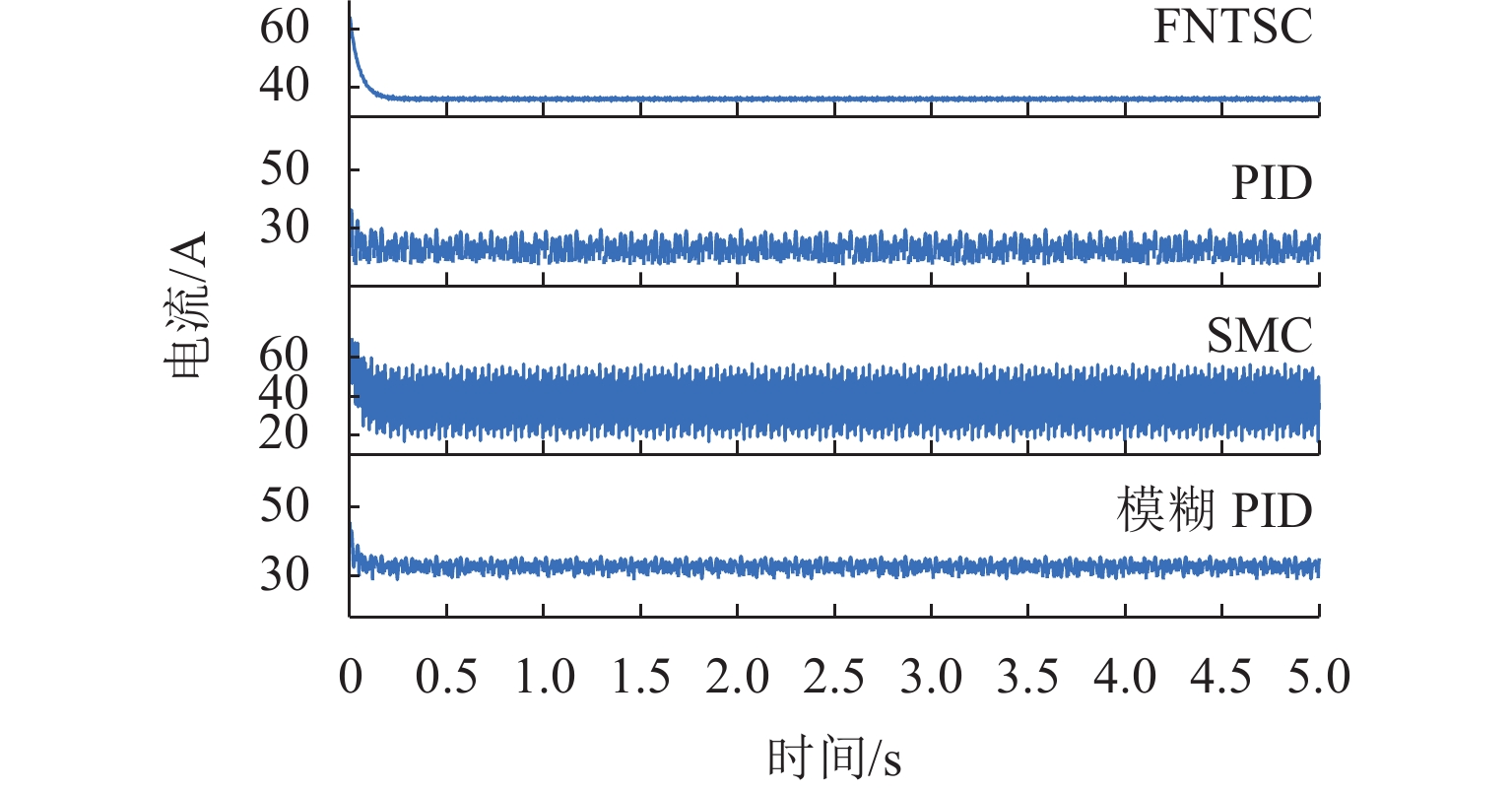
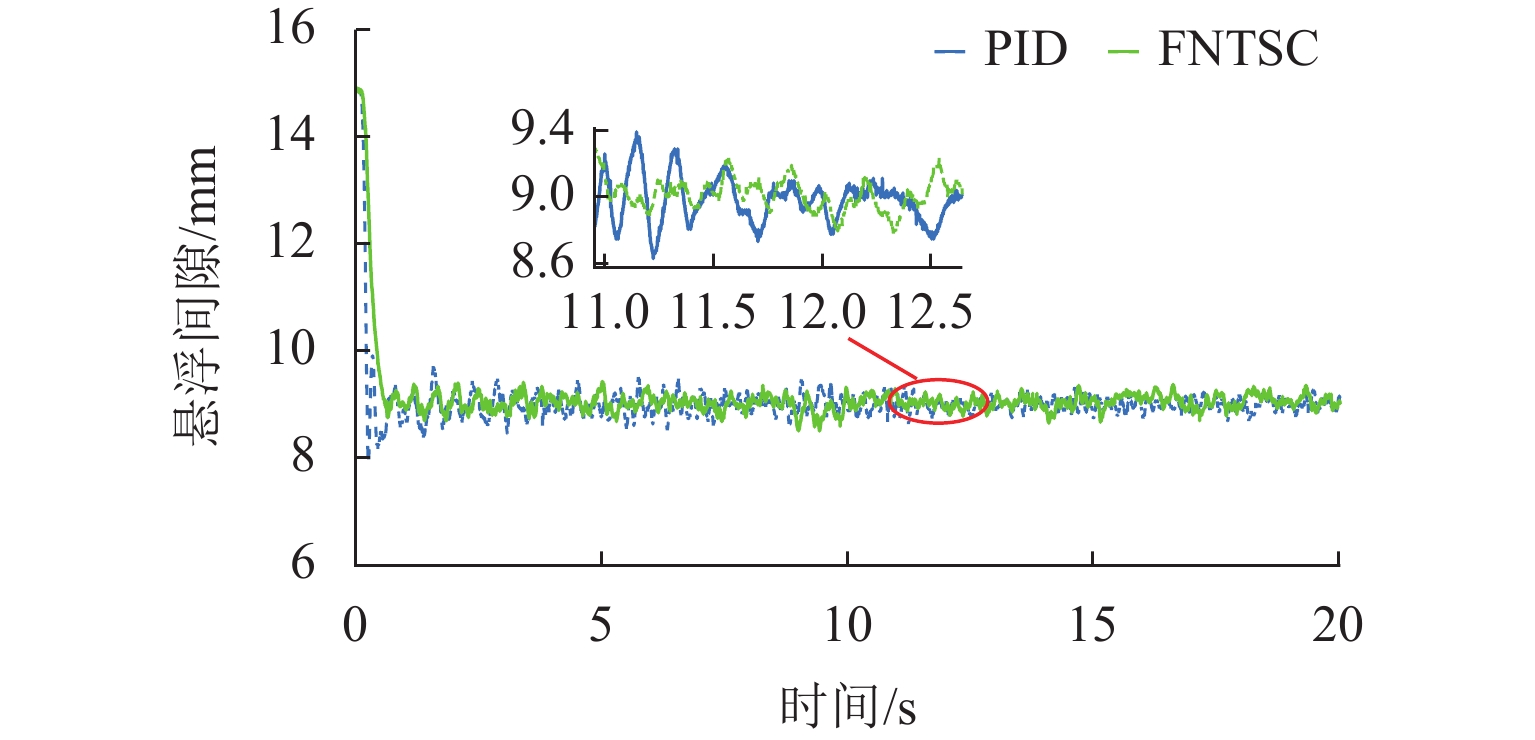
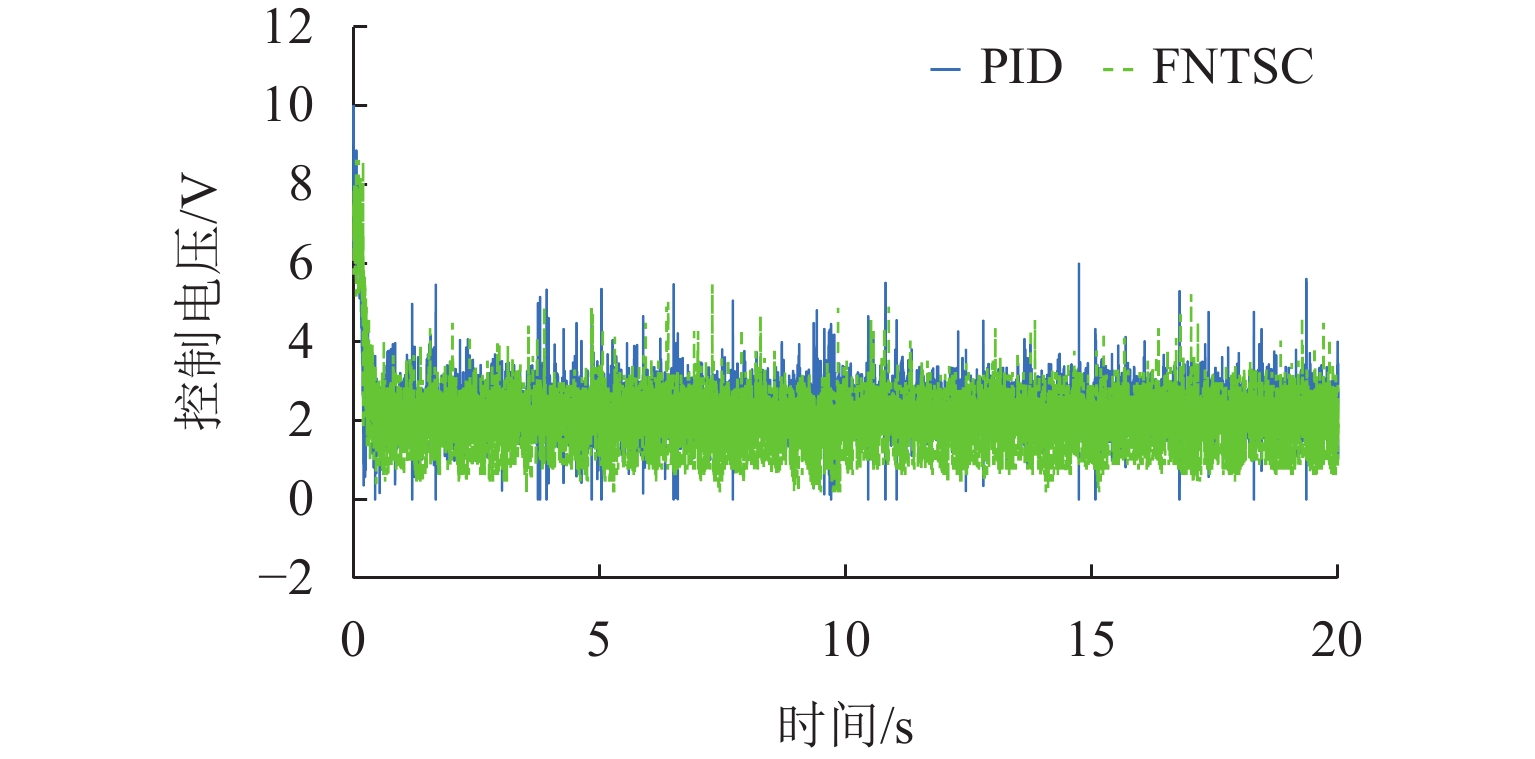
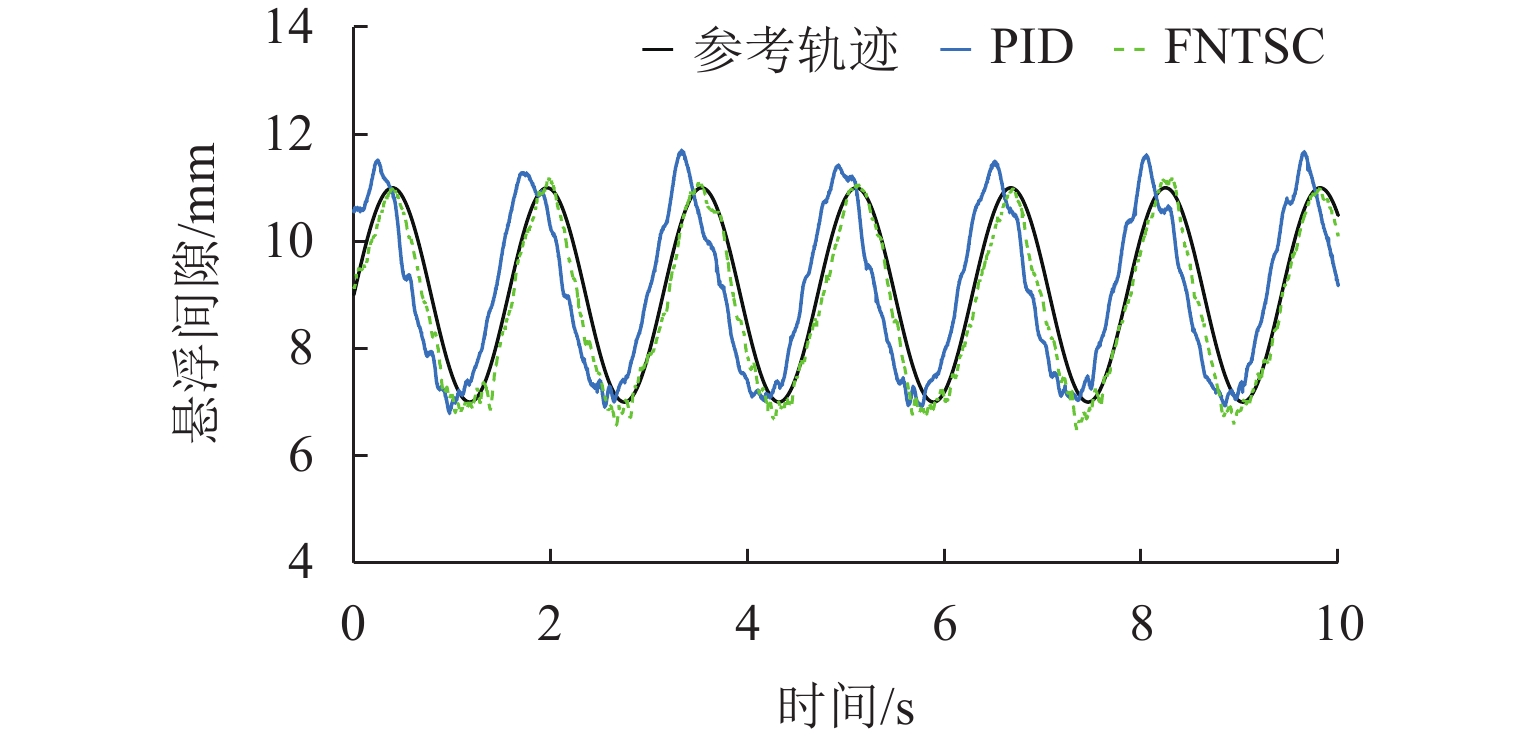
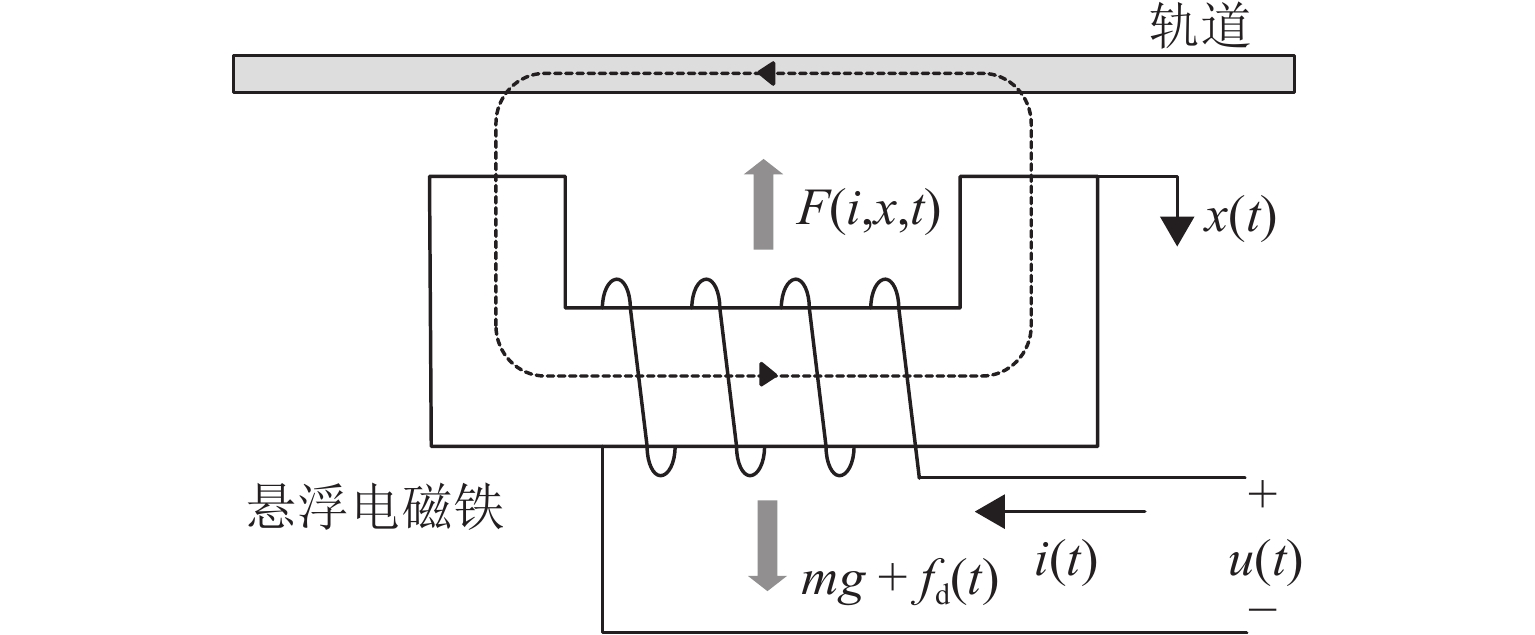
To improve the degradation of high-precision dynamic levitation performance in electromagnetic suspension (EMS) maglev trains caused by time-varying system parameters, crosswind aerodynamic lift, and passenger load variations during actual operation, an adaptive fuzzy non-singular terminal sliding mode control (FNTSC) method was proposed. Firstly, a dynamics model of a single electromagnet levitation system considering system uncertainty and external disturbance was established. Secondly, a fuzzy logic system was employed to achieve online approximation and dynamic compensation for the unknown nonlinear function in the levitation system. Then, to address the singularity issue and chattering phenomenon inherent in conventional sliding mode control (SMC), a non-singular terminal sliding mode controller was designed, and the finite-time convergence of the tracking error was proved based on the Lyapunov stability theory without any linearization. Finally, the PID, SMC, and fuzzy PID control methods were simulated and compared with the FNTSC method, and further experimental comparisons of the PID and FNTSC methods were carried out to verify their effectiveness and robustness. The experimental results show that the FNTSC exhibits smaller steady-state errors and superior tracking performance under random external disturbances and irregular trajectories. Compared with the PID control method, the FNTSC reduces the root-mean-square (RMS) error of static levitation by 15.7% and constrains the tracking error for a sinusoidal irregular trajectory with a 2 mm amplitude within 0.05 mm.

| [1] |
LI F X, SUN Y G, XU J Q, et al. Control methods for levitation system of EMS-type maglev vehicles: an overview[J]. Energies, 2023, 16(7): 2995.1-2995.26.
|
| [2] |
王志强,龙志强,李晓龙. 高速磁浮列车搭接结构悬浮系统仿真分析[J]. 西南交通大学学报,2024,59(3): 590-599.
WANG Zhiqiang, LONG Zhiqiang, LI Xiaolong. Simulation analysis of levitation system of high-speed maglev trains with joint structure[J]. Journal of Southwest Jiaotong University, 2024, 59(3): 590-599.
|
| [3] |
马卫华,胡俊雄,李铁,等. EMS型中低速磁浮列车悬浮架技术研究综述[J]. 西南交通大学学报,2023,58(4): 720-733.
MA Weihua, HU Junxiong, LI Tie, et al. Technologies research review of electro-magnetic suspension medium-low-speed maglev train levitation frame[J]. Journal of Southwest Jiaotong University, 2023, 58(4): 720-733.
|
| [4] |
ZHANG D D, QIANG H Y, SUN Y G, et al. Model-independent robust control for electromagnetic suspension systems of maglev vehicles[J]. IEEE Transactions on Applied Superconductivity, 2024, 34(8): 3602405.1-3602405.5.
|
| [5] |
李小珍,周彦希,王铭. 侧风下大跨拱桥变形对高速列车行车平稳性的影响机理[J]. 西南交通大学学报,2025,60(1): 1-9.
LI Xiaozhen, ZHOU Yanxi, WANG Ming. Influence mechanism of long-span arch bridge deformation on running stability of high-speed trains under crosswind[J]. Journal of Southwest Jiaotong University,2025, 60(1): 1-9.
|
| [6] |
胡轲珽,徐俊起,刘志刚,等. 基于强化学习的电磁悬浮型磁浮列车悬浮控制[J]. 同济大学学报(自然科学版),2023,51(3): 332-340.
HU Keting, XU Junqi, LIU Zhigang, et al. Reinforcement learning-based suspension control for electromagnetic suspension maglev trains[J]. Journal of Tongji University (Natural Science), 2023, 51(3): 332-340.
|
| [7] |
秦耀,杨杰,江聚松,等. 基于改进自抗扰的永磁电磁混合悬浮型磁浮球控制方法[J]. 铁道科学与工程学报,2023,20(11): 4333-4343.
QIN Yao, YANG Jie, JIANG Jusong, et al. Permanent magnet electromagnetic hybrid levitation magnetic levitation ball control method based on improved auto disturbance rejection[J]. Journal of Railway Science and Engineering, 2023, 20(11): 4333-4343.
|
| [8] |
刘怡恒,张和洪,龙志强,等. 基于改进跟踪微分器的磁浮列车悬浮控制研究[J]. 机车电传动,2023(2): 113-122.
LIU Yiheng, ZHANG Hehong, LONG Zhiqiang, et al. Research on suspension control of maglev train via enhanced tracking differentiator[J]. Electric Drive for Locomotives, 2023(2): 113-122.
|
| [9] |
王强. 基于神经网络逼近的磁浮列车动态悬浮控制[J]. 科学技术与工程,2021,21(28): 12117-12123.
WANG Qiang. Dynamic levitation control of maglev train based on neural network approximation[J]. Science Technology and Engineering, 2021, 21(28): 12117-12123.
|
| [10] |
王美琪,曾思恒,李源,等. 二自由度磁浮列车悬浮系统时滞控制研究[J]. 西南交通大学学报,2024,59(4): 812-822.
WANG Meiqi, ZENG Siheng, LI Yuan, et al. Research on time lag control of levitation system of two-degree-of-freedom magnetic levitation train[J]. Journal of Southwest Jiaotong University, 2024, 59(4): 812-822.
|
| [11] |
朴明伟,梁世宽,薛世海,等. 高速磁浮列车主动悬浮与导向的2-DOF控制[J]. 中国铁道科学,2006,27(4): 80-85.
PIAO Mingwei, LIANG Shikuan, XUE Shihai, et al. 2-DOF control of active levitation and guidance in high-speed maglev train[J]. China Railway Science, 2006, 27(4): 80-85.
|
| [12] |
CHEN C, XU J Q, LIN G B, et al. Model identification and nonlinear adaptive control of suspension system of high-speed maglev train[J]. Vehicle System Dynamics, 2022, 60(3): 884-905. doi: 10.1080/00423114.2020.1838564
|
| [13] |
王成杰,张静,许平洋,等. 基于滑模变结构控制的磁浮列车悬浮控制研究[J]. 电气自动化,2019,41(2): 86-90.
WANG Chengjie, ZHANG Jing, XU Pingyang, et al. Research on suspension control of maglev trains based on sliding mode variable structure control[J]. Electrical Automation, 2019, 41(2): 86-90.
|
| [14] |
陈琛,徐俊起,林国斌,等. 具有径向基网络加速度反馈的磁浮列车悬浮系统滑模控制[J]. 同济大学学报(自然科学版),2021,49(12): 1642-1651.
CHEN Chen, XU Junqi, LIN Guobin, et al. Sliding mode control of maglev train suspension system with neural network acceleration feedback[J]. Journal of Tongji University (Natural Science), 2021, 49(12): 1642-1651.
|
| [15] |
陈萍,史天成,于明月,等. 中低速磁浮列车滑模自抗扰悬浮控制算法[J]. 铁道科学与工程学报,2023,20(2): 682-693.
CHEN Ping, SHI Tiancheng, YU Mingyue, et al. Sliding mode active disturbance rejection levitation control algorithm of the medium-and low-speed maglev vehicles[J]. Journal of Railway Science and Engineering, 2023, 20(2): 682-693.
|
| [16] |
佟来生,张文跃,郑文文,等. HJI理论下滑模鲁棒控制对磁浮列车悬浮特性影响研究[J]. 机械科学与技术,2021,40(9): 1439-1443.
TONG Laisheng, ZHANG Wenyue, ZHENG Wenwen, et al. Influence of HJI theory sliding mode robust control on suspension characteristics of maglev train[J]. Mechanical Science and Technology for Aerospace Engineering, 2021, 40(9): 1439-1443.
|
| [17] |
LIU M J, WU H, XU J Q, et al. Research on sliding mode controller of the high-speed maglev train under aerodynamic load[J]. Advances in Mechanical Engineering, 2022, 14(10): 2147483647.1-2147483647.15.
|
| [18] |
杨松林,陈天昊,刘启航,等. 一种改进趋近律的PMSM非奇异终端滑模控制[J]. 制造技术与机床,2024(4): 5-12.
YANG Songlin, CHEN Tianhao, LIU Qihang, et al. An improved approach law for PMSM non-singular terminal sliding mode control[J]. Manufacturing Technology & Machine Tool, 2024(4): 5-12.
|
| [19] |
常光宇,陈志峰,郭春雨,等. Stewart平台神经网络非奇异终端滑模控制[J]. 智能系统学报,2024,19(2): 353-359.
CHANG Guangyu, CHEN Zhifeng, GUO Chunyu, et al. Neural network-based nonsingular terminal sliding mode control of the Stewart platform[J]. CAAI Transactions on Intelligent Systems, 2024, 19(2): 353-359.
|
| [20] |
WANG J X, ZHAO L, YU L. Adaptive terminal sliding mode control for magnetic levitation systems with enhanced disturbance compensation[J]. IEEE Transactions on Industrial Electronics, 2020, 68(1): 756-766.
|
| [21] |
张燕,弓正菁,樊琪,等. 基于干扰观测器的上肢外骨骼终端滑模控制[J]. 控制工程,2024,31(1): 1-9.
ZHANG Yan, GONG Zhengjing, FAN Qi, et al. Terminal sliding mode control of upper limb exoskeleton based on disturbance observer[J]. Control Engineering of China, 2024, 31(1): 1-9.
|
| [22] |
SU X Y, XU Y L, YANG X F. Neural network adaptive sliding mode control without overestimation for a maglev system[J]. Mechanical Systems and Signal Processing, 2022, 168: 108661.1-108661.12.
|
| [23] |
SUN Y G, XU J Q, LIN G B, et al. RBF neural network-based supervisor control for maglev vehicles on an elastic track with network time delay[J]. IEEE Transactions on Industrial Informatics, 2022, 18(1): 509-519. doi: 10.1109/TII.2020.3032235
|
| [24] |
ZHANG D D, SUN Y G, JIA N, et al. Adaptive fuzzy super-twisting sliding mode control for the multi-electromagnets levitation system of maglev vehicles: design and experiments[J/OL]. IEEE Transactions on Intelligent Vehicles, 2024, 1-11 [2025-05-02]. https://ieeexplore.ieee.org/document/10684006.
|
| [25] |
杨杰,秦耀,汪永壮,等. 永磁电磁混合型磁浮球的改进滑模控制方法[J]. 湖南大学学报(自然科学版),2023,50(4): 200-209.
YANG Jie, QIN Yao, WANG Yongzhuang, et al. Improved sliding mode control method for permanent magnet electromagnetic hybrid magnetic levitation ball[J]. Journal of Hunan University (Natural Sciences), 2023, 50(4): 200-209.
|
| [26] |
孙友刚,徐俊起,贺祯宇,等. 基于误差交叉耦合的多电磁铁悬浮系统滑模协同控制[J]. 西南交通大学学报,2022,57(3): 558-565.
SUN Yougang, XU Junqi, HE Zhenyu, et al. Sliding mode cooperative control of multi-electromagnet suspension system based on error cross coupling[J]. Journal of Southwest Jiaotong University, 2022, 57(3): 558-565.
|
Figures(16) / Tables(1)



 DownLoad:
DownLoad: