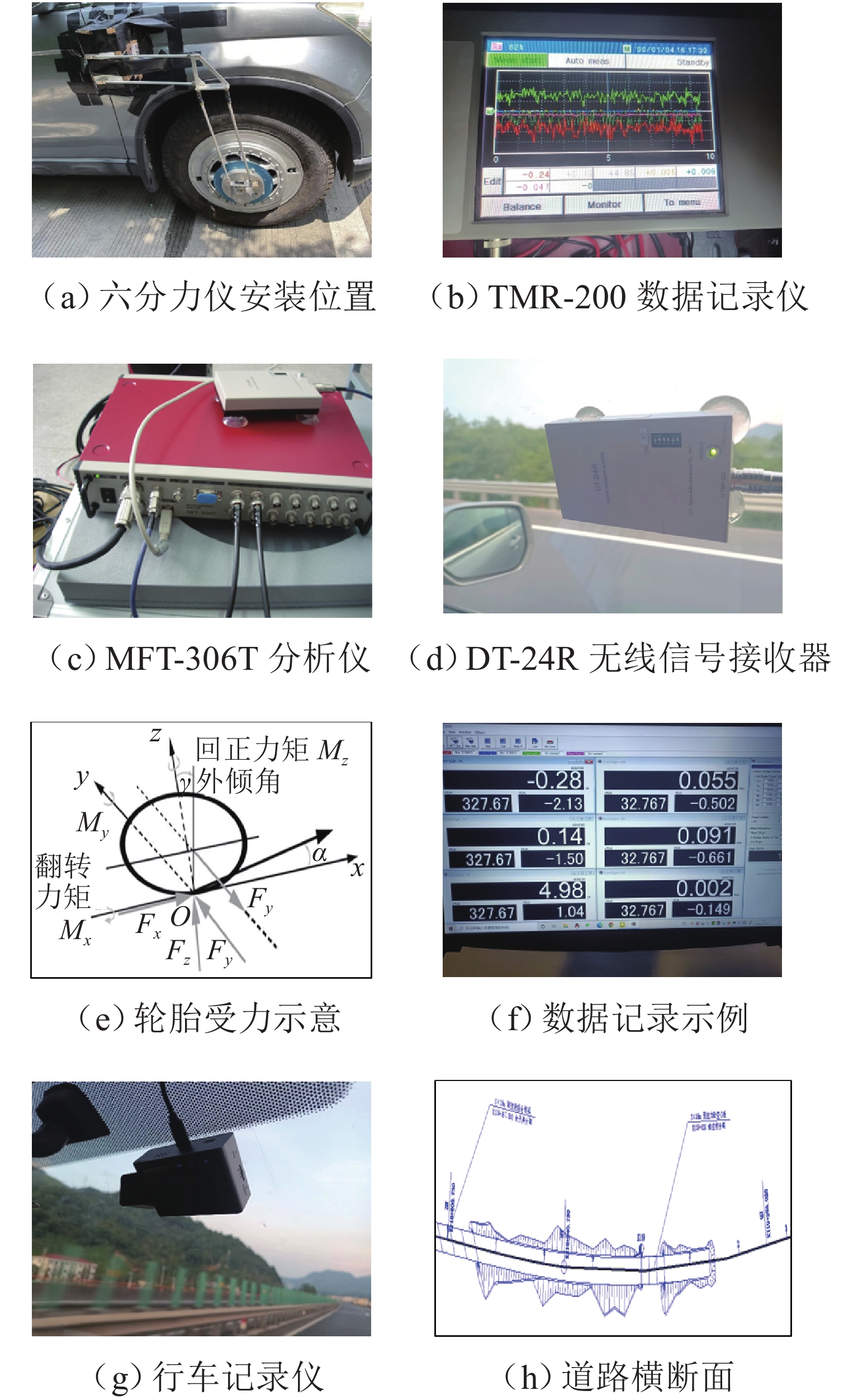
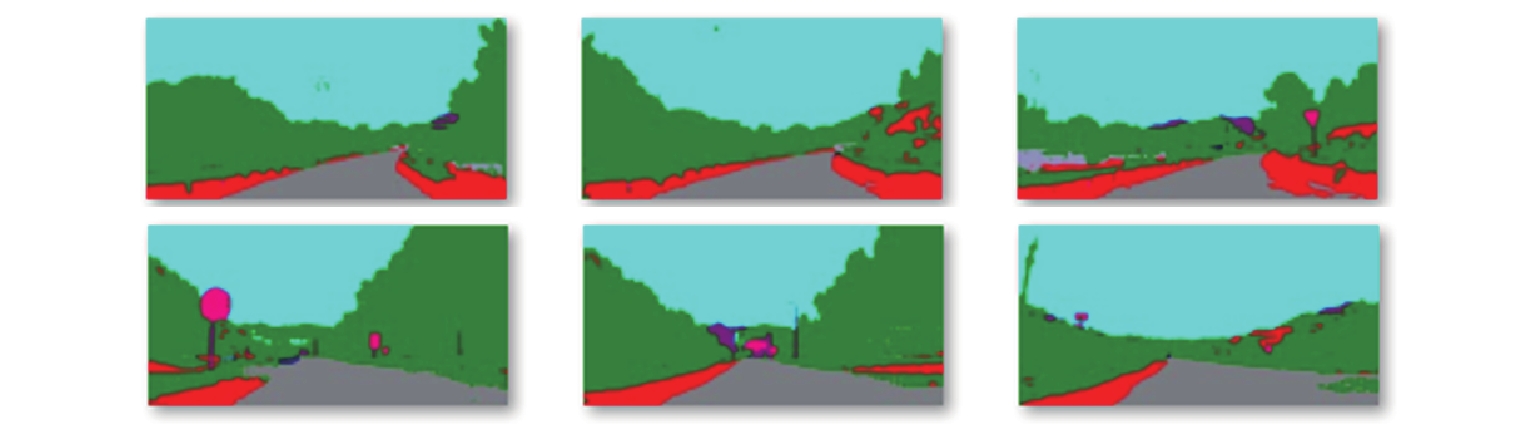
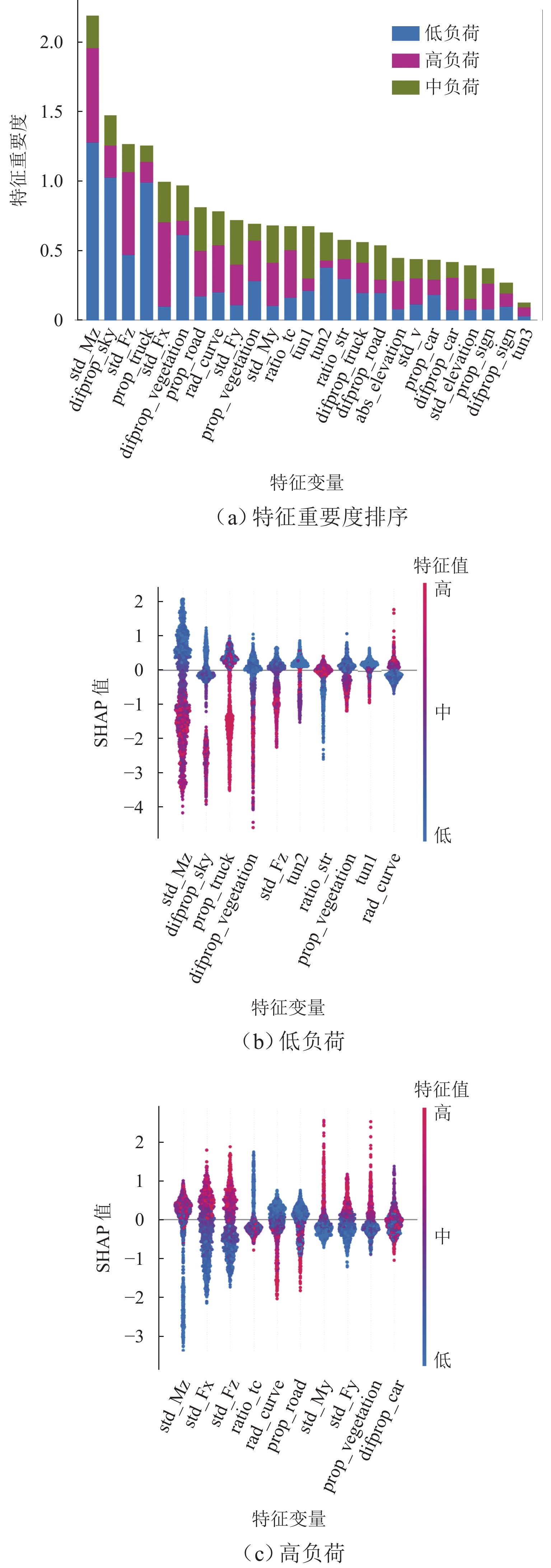
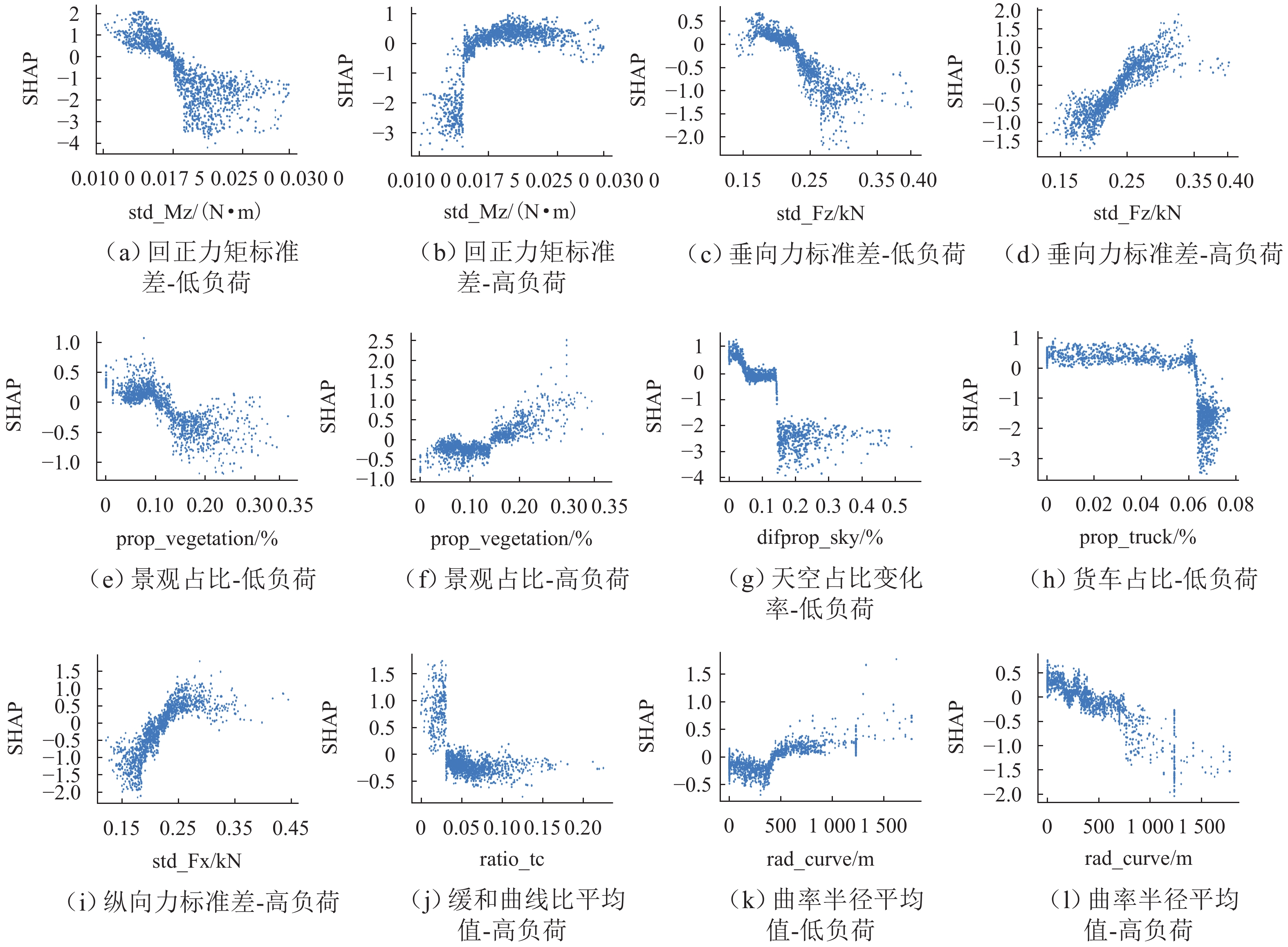
To enable real-time driver stress detection without relying on physiological signals, a method based on road alignment parameters, video images, and six-component tire forces was proposed. The proposed method utilized a computer vision model, namely Deeplabv3, to extract semantic information of scene elements from driving videos for characterizing the driving environment. The scene element parameters were incorporated with vehicle dynamics parameters and road alignment parameters to construct a multimodal parameter feature set. Subsequently, a machine learning algorithm was used to achieve driver stress detection. To verify the effectiveness of the proposed method, a field driving experiment was conducted on Jinliwen Freeway for collecting drivers’ eye movement, heart rate data, vehicle dynamics parameters, road alignment parameters, and driving video. The eye movement and heart rate data were utilized to measure stress levels. The random forest, support vector machine, XGBoost, and LightGBM algorithms were applied to build a stress detection model, and shapley additive explained (SHAP) was adopted to analyze influencing factors. The results show that LightGBM has the best performance, with macro average and weighted average F1 values reaching 91.99% and 93.25%, respectively, indicating that the proposed method can achieve accurate stress detection. Additionally, when the standard deviation of aligning torque, vertical force, and longitudinal force exceeds 0.016 3 N·m, 0.237 kN, and 0.229 kN, the average curvature radius of the road section is less than 317 m, and the average transition curve ratio of the road section is less than 0.029 6; the change rates of sky proportion, vegetation proportion, and truck proportion exceed 5.89%, 14.85%, and 6.37%, and the probability of the driver being in a high-stress state is higher. As the required data is easy to collect, the proposed method has a high application feasibility and can provide a reference for the evaluation of freeway safety and comfort. Moreover, it provides theoretical support for the landscape and alignment design of freeways, as well as the design of vehicle driver warning systems.


 Advance Search
Advance Search
 Email alert
Email alert RSS
RSS [Abstract]
[Abstract] [FullText HTML]
[FullText HTML] PDF 2593KB
PDF 2593KB Supplements
Supplements [Cited By]
[Cited By]