- ISSN 0258-2724
- CN 51-1277/U
- EI Compendex
- Scopus
- Indexed by Core Journals of China, Chinese S&T Journal Citation Reports
- Chinese S&T Journal Citation Reports
- Chinese Science Citation Database

| Citation: | WANG Zhiqiang, GUO Weipeng, SANG Ziliang, LI Bowen, LONG Zhiqiang, LI Xiaolong. Optimized Control Method for Guidance System of High-Speed Maglev Train[J]. Journal of Southwest Jiaotong University, 2025, 60(4): 833-841, 864. doi: 10.3969/j.issn.0258-2724.20230516

|
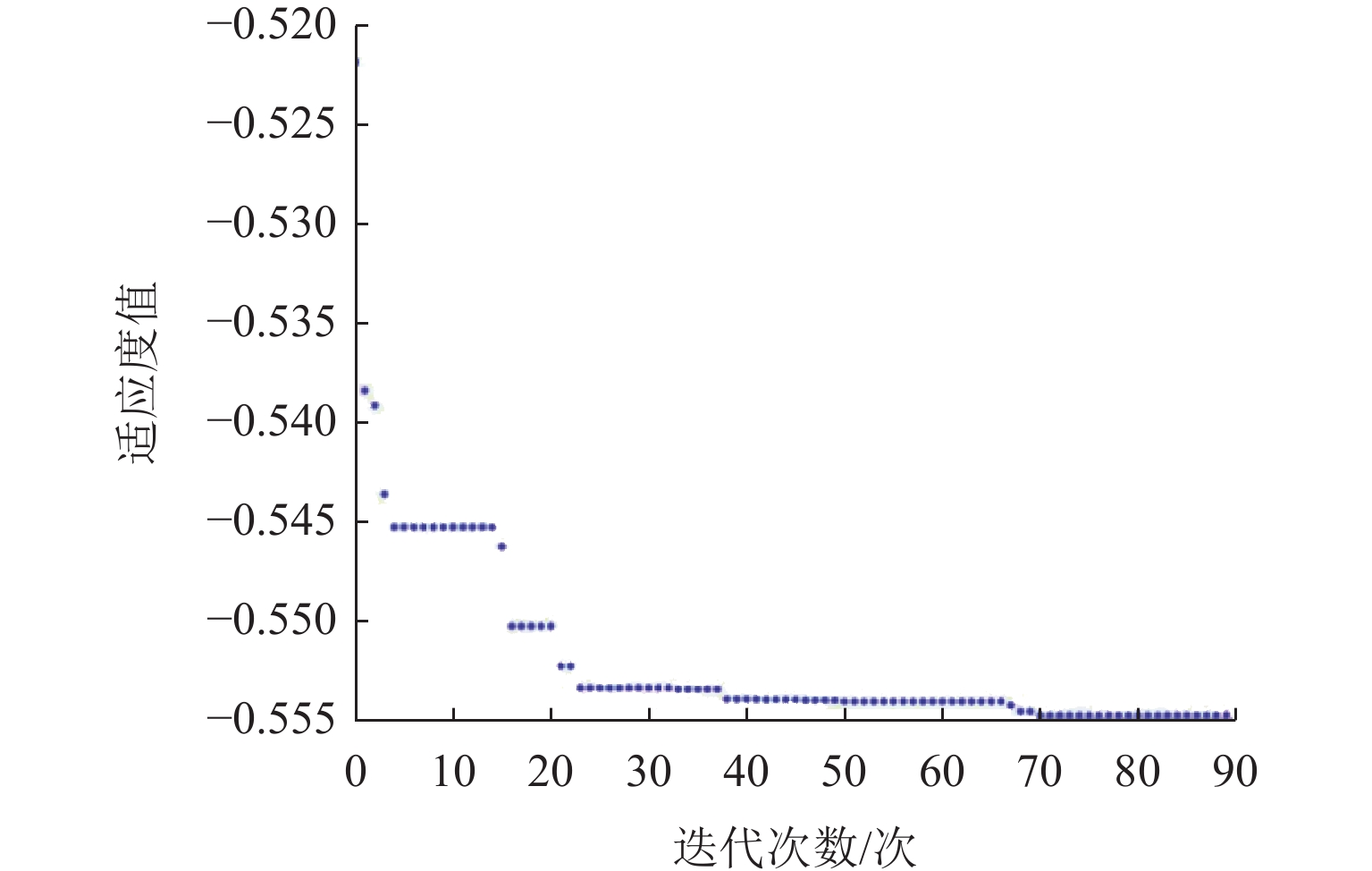
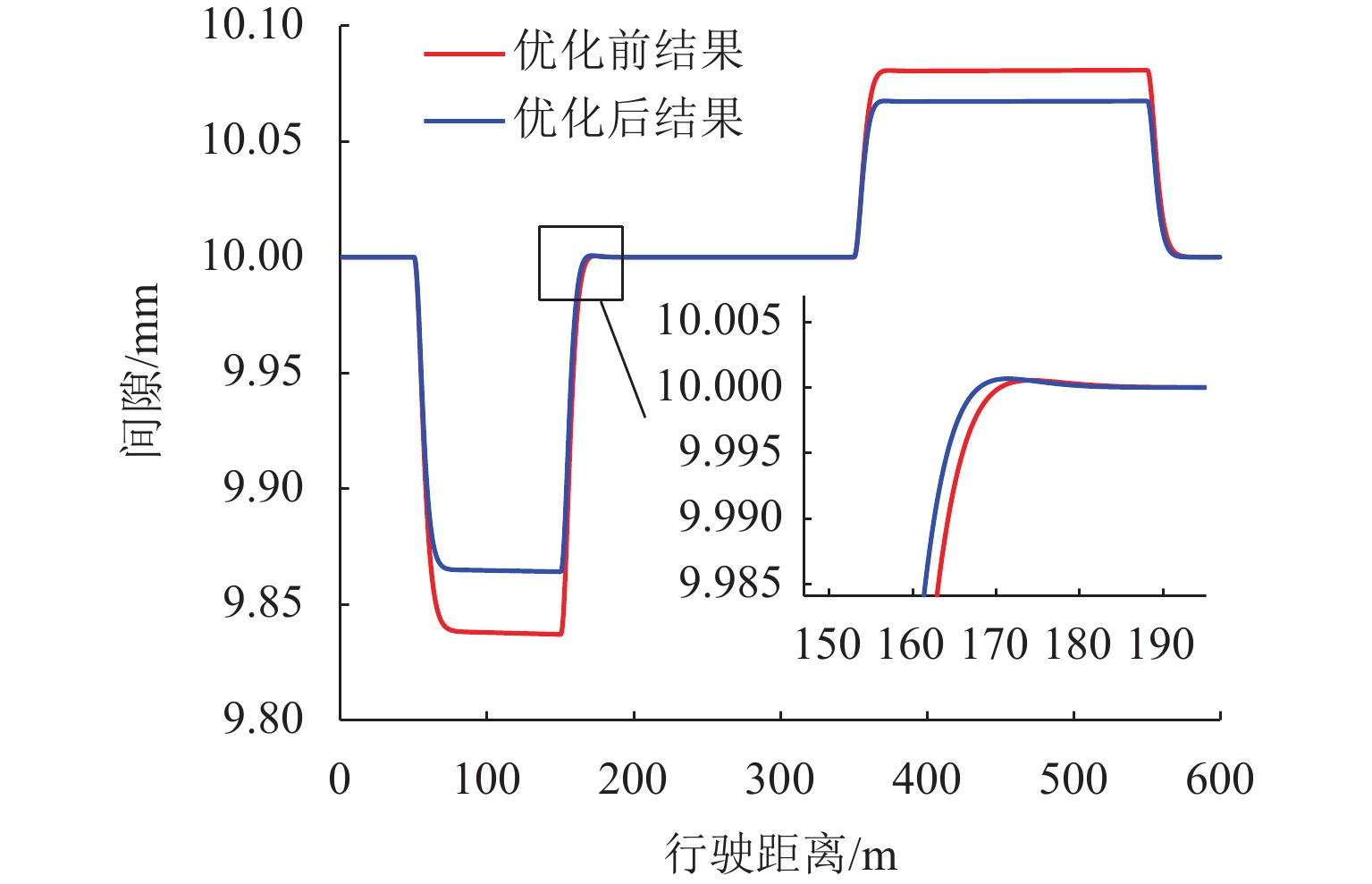
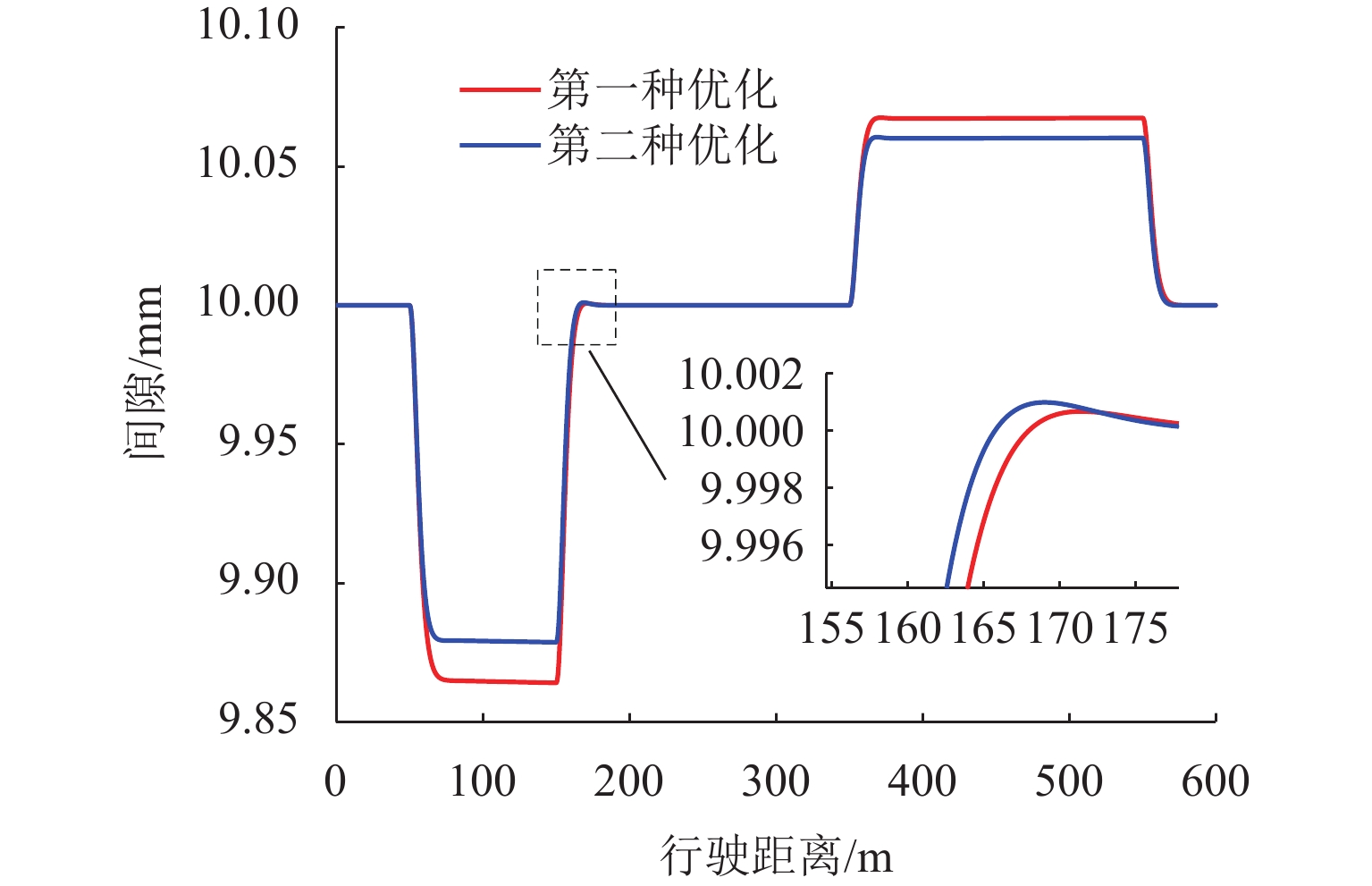
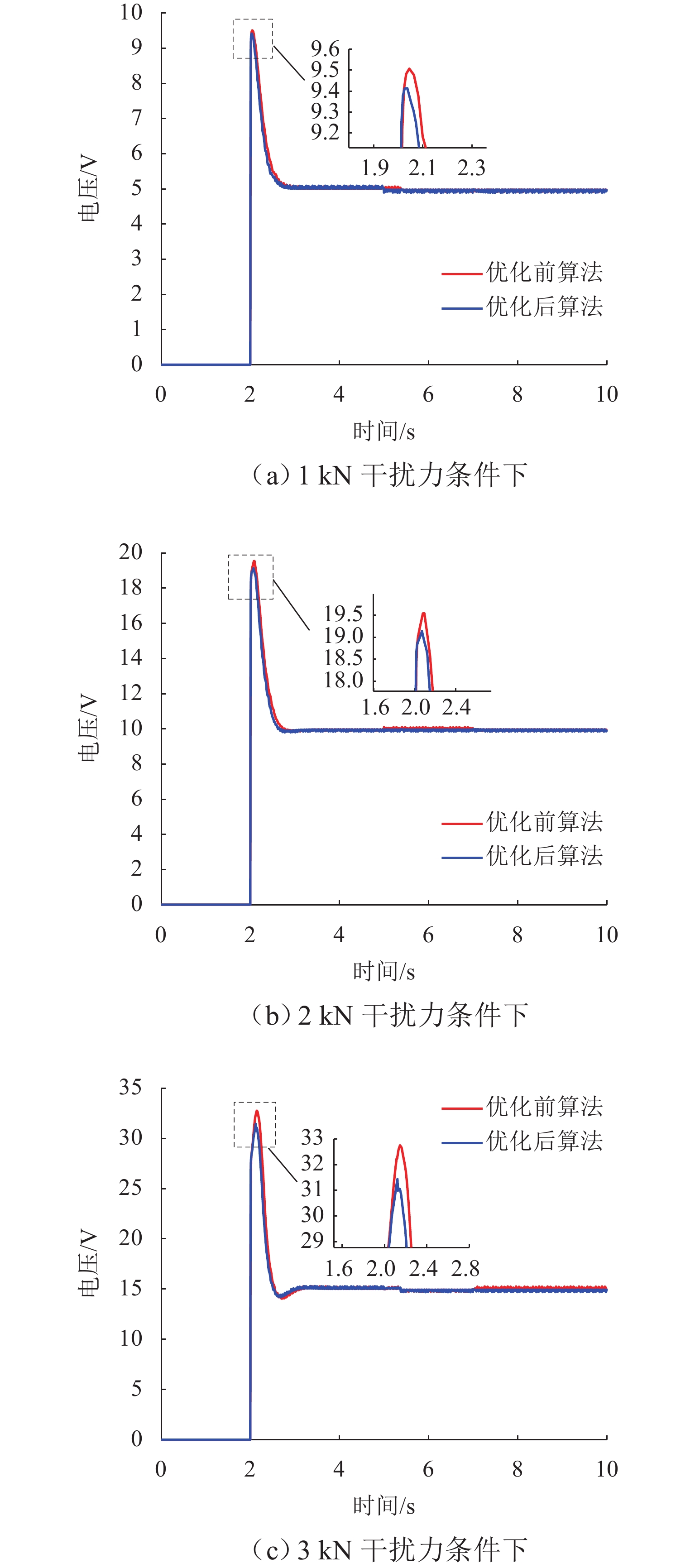
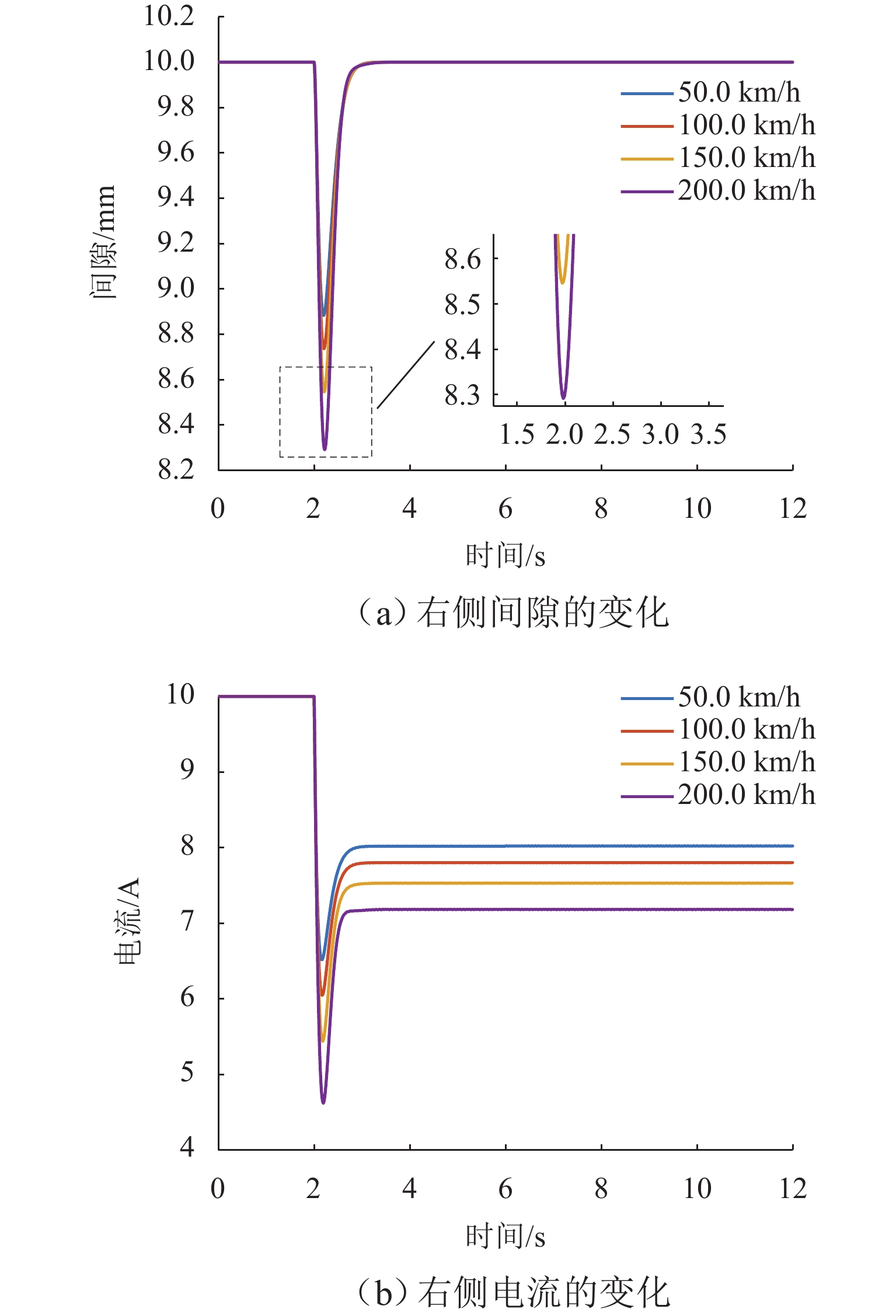
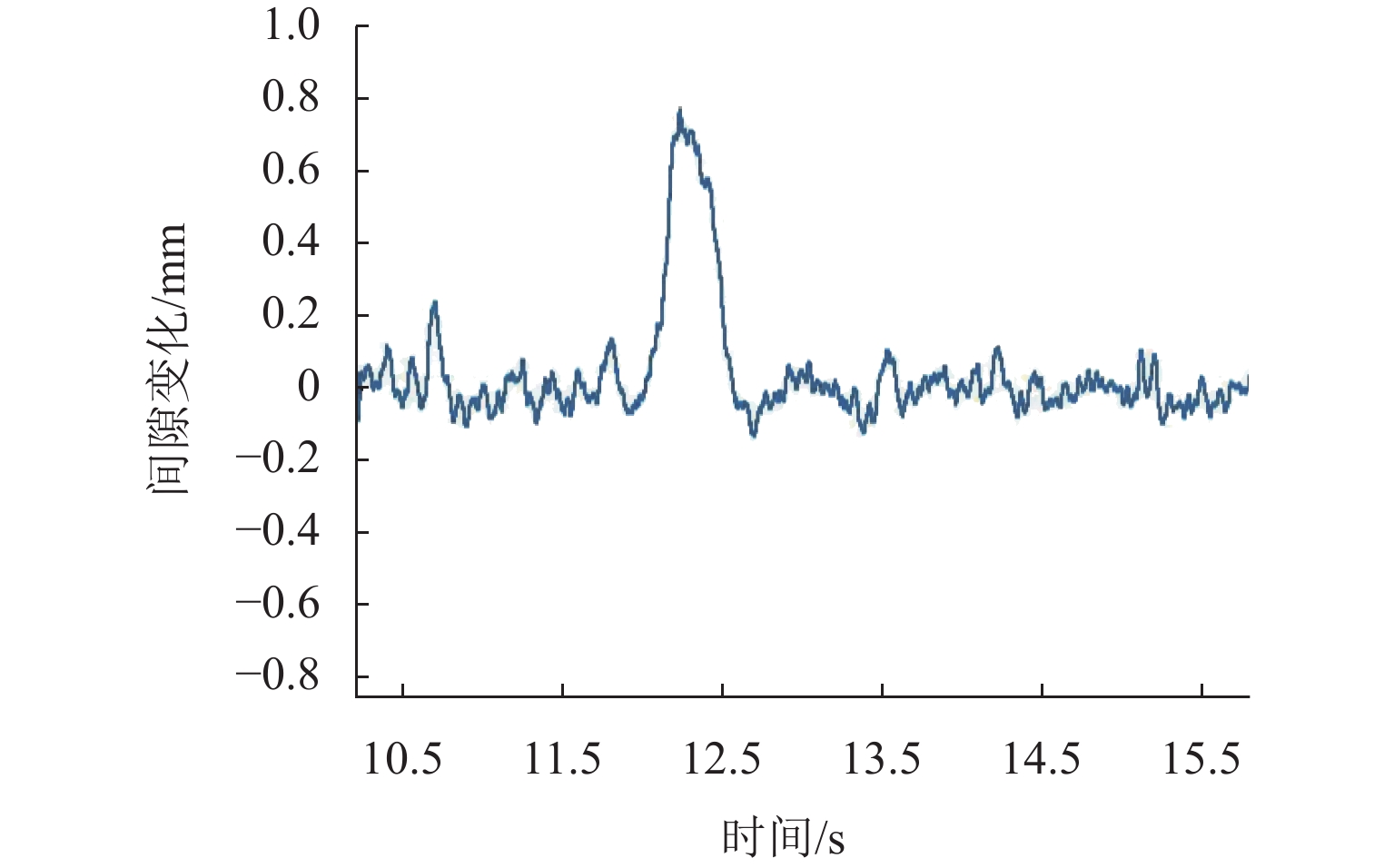
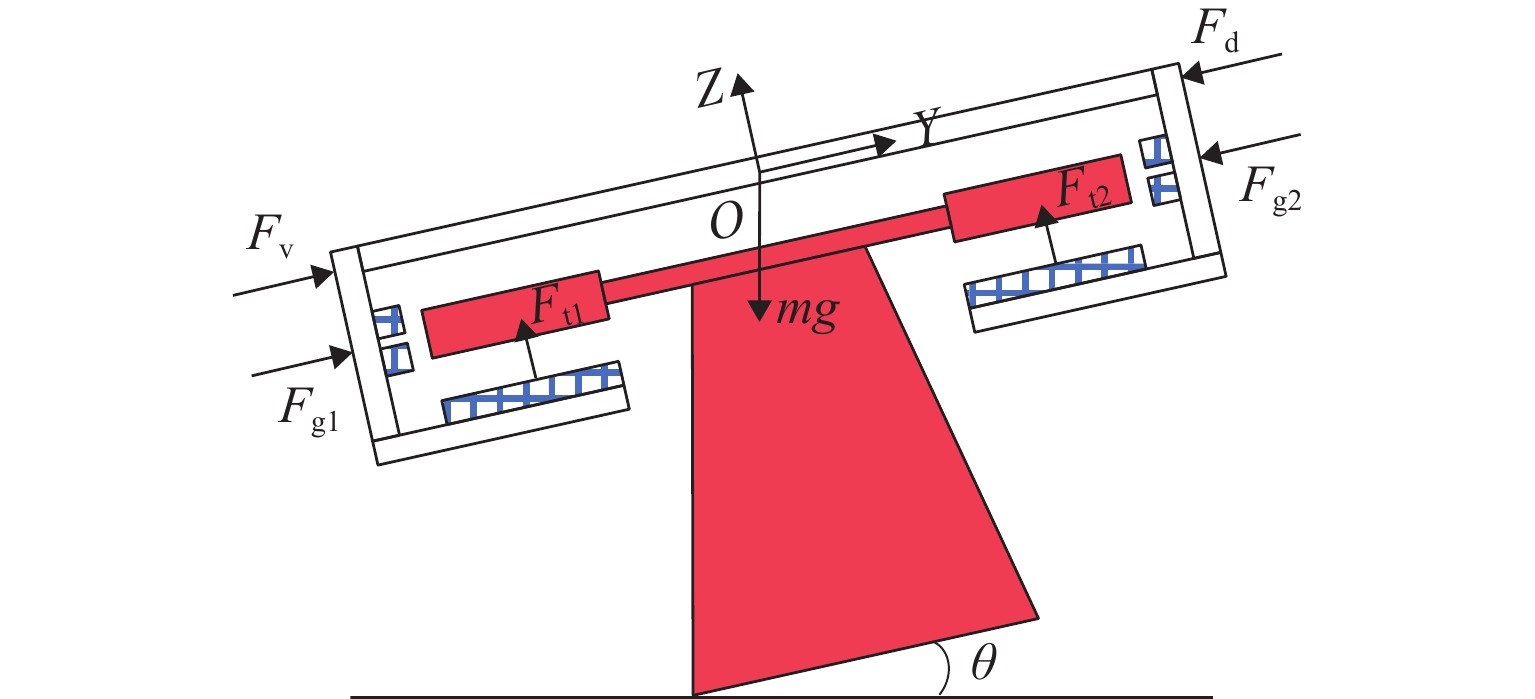
To further enhance the control performance of the guidance system for high-speed maglev trains, the guidance system was taken as the research subject, and the design and simulation of a guidance controller were carried out based on the mathematical model of a jointed guidance system. The behavior of the maglev train navigating through curves was analyzed under two operating conditions: different velocities while navigating curves and varying magnitudes of lateral disturbance forces. A mathematical model incorporating these disturbances was developed, and a nominal guidance controller was designed using the linear quadratic regulator (LQR) method. The controller parameters were then optimized using a particle swarm optimization (PSO) algorithm. A simulation model of the guidance system was established, and the system’s responses under the two specific operating conditions were analyzed using a simulation platform. A comparison between the algorithms before and after optimization was conducted. The results indicate that, under simulated disturbance forces of 1 kN, 2 kN, and 3 kN, the fluctuation amplitudes of the guidance gap are reduced by 9.46%, 9.70%, and 11.82%, respectively. Furthermore, the recovery velocity of the guidance gap is improved with the optimized algorithm compared to the pre-optimization version. The optimized algorithm also improves the train’s performance when navigating curves and when subjected to crosswind disturbances.

| [1] |
吴云飞. EMS型高速磁浮列车导向控制系统及其仿真[J]. 黑龙江科技学院学报,2006,16(4): 244-247.
WU Yunfei. Guidance control system and simulation research of EMS type high-speed maglev vehicle[J]. Journal of Heilongjiang Institute of Science and Technology, 2006, 16(4): 244-247.
|
| [2] |
郝阿明,龙志强,常文森. 考虑轨道不平顺的高速磁浮列车导向系统控制器设计[J]. 系统仿真学报,2008,20(22): 6234-6237.
HAO Aming, LONG Zhiqiang, CHANG Wensen. Guidance controller design of high speed maglev train considering random irregularity of guideway[J]. Journal of System Simulation, 2008, 20(22): 6234-6237.
|
| [3] |
郝阿明,龙志强,常文森. 高速磁浮列车导向系统的鲁棒控制器设计[J]. 铁道学报,2008,30(6): 40-45.
HAO Aming, LONG Zhiqiang, CHANG Wensen. Design of the robust controller of the guidance system in high-speed maglev train[J]. Journal of the China Railway Society, 2008, 30(6): 40-45.
|
| [4] |
ZHAI M D, HAO A M, LI X L, et al. Research on the active guidance control system in high speed maglev train[J]. IEEE Access, 2019, 7: 741-752. doi: 10.1109/ACCESS.2018.2885784
|
| [5] |
LI B W, LI X L, WANG Z Q, et al. Design of ADRC for guidance system of high speed maglev train[C]//2020 Chinese Automation Congress (CAC). Shanghai: IEEE, 2020: 1471-1476.
|
| [6] |
郝阿明,佘龙华,常文森. EMS型高速磁浮列车自适应导向控制器设计[J]. 控制工程,2008,15(2): 116-119,170. doi: 10.3969/j.issn.1671-7848.2008.02.002
HAO Aming, SHE Longhua, CHANG Wensen. Adaptive controller design of guidance system of EMS high speed maglev train[J]. Control Engineering of China, 2008, 15(2): 116-119,170. doi: 10.3969/j.issn.1671-7848.2008.02.002
|
| [7] |
朴明伟,曹玉峰,梁树林,等. 高速磁浮列车组装模型及导向原理[J]. 中国铁道科学,2008,29(4): 103-108.
PIAO Mingwei, CAO Yufeng, LIANG Shulin, et al. Assembled model and guidance principle of high-speed maglev train[J]. China Railway Science, 2008, 29(4): 103-108.
|
| [8] |
马铁刚. 高速磁浮车主动悬浮导向控制稳定性研究[D]. 大连:大连交通大学,2005.
|
| [9] |
朴明伟,梁世宽,薛世海,等. 高速磁浮列车主动悬浮与导向的2-DOF控制[J]. 中国铁道科学,2006,27(4): 80-85.
PIAO Mingwei, LIANG Shikuan, XUE Shihai, et al. 2-DOF control of active levitation and guidance in high-speed maglev train[J]. China Railway Science, 2006, 27(4): 80-85.
|
| [10] |
吴海鹏. 高速磁浮车小半径曲线运行性能的研究[D]. 大连:大连交通大学,2007.
|
| [11] |
吴云飞. 高速磁浮列车导向控制系统仿真研究[D]. 成都:西南交通大学,2006.
|
| [12] |
王汝宁. 高速磁浮列车的转向运动相关问题研究[D]. 长沙:国防科学技术大学,2010.
|
| [13] |
赵春霞. EMS型高速磁浮列车导向动力学研究[D]. 长沙:国防科学技术大学,2014.
|
| [14] |
李博文. 高速磁浮列车主动导向系统优化控制算法研究[D]. 长沙:国防科技大学,2021.
|
| [15] |
龙长林. 基于数值方法的磁浮列车新型导向电磁铁电磁特性分析[D]. 长沙:国防科学技术大学,2008.
|
| [16] |
刘少克,龙长林,陈贵荣,等. 高速磁悬浮列车新型导向电磁铁分析[J]. 机车电传动,2010(1): 49-51.
LIU Shaoke, LONG Changlin, CHEN Guirong, et al. Analysis of new guide electromagnet for high-speed maglev train[J]. Electric Drive for Locomotives, 2010(1): 49-51.
|
| [17] |
DING S S, SUN J J, HAN W T, et al. Modeling and analysis of a novel guidance magnet for high-speed maglev train[J]. IEEE Access, 2019(7):133324-133334.
|
| [18] |
张德. 高速列车横风挡风装置空气动力学性能的数值分析[D]. 北京:北京交通大学,2013.
|
| [19] |
杨永刚,陈大伟,梅元贵. 600 km/h高速磁浮列车明线交会横向气动性能[J]. 振动与冲击,2022,41(1): 137-146.
YANG Yonggang, CHEN Dawei, MEI Yuangui. Lateral aerodynamic performance of 600 km/h high-speed maglev train during open line intersection[J]. Journal of Vibration and Shock, 2022, 41(1): 137-146.
|
| [20] |
左志超. 高速磁浮列车导向系统的容错控制问题研究[D]. 长沙:国防科技大学,2019.
|
| [21] |
郑涛. 风速对高速列车气动力的影响研究[J]. 时代农机,2019,46(8): 59,62.
|
Figures(12) / Tables(2)



 DownLoad:
DownLoad: