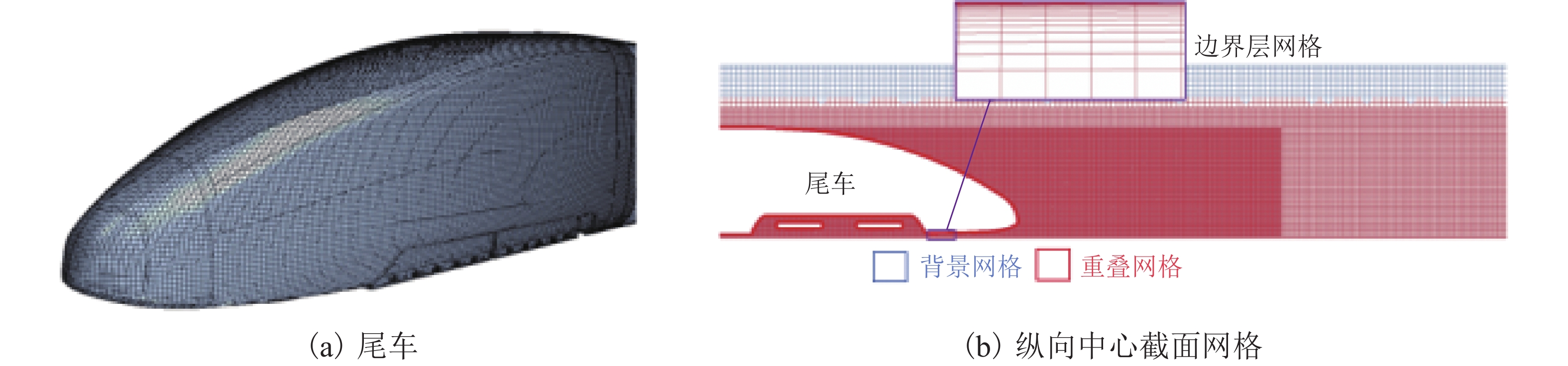
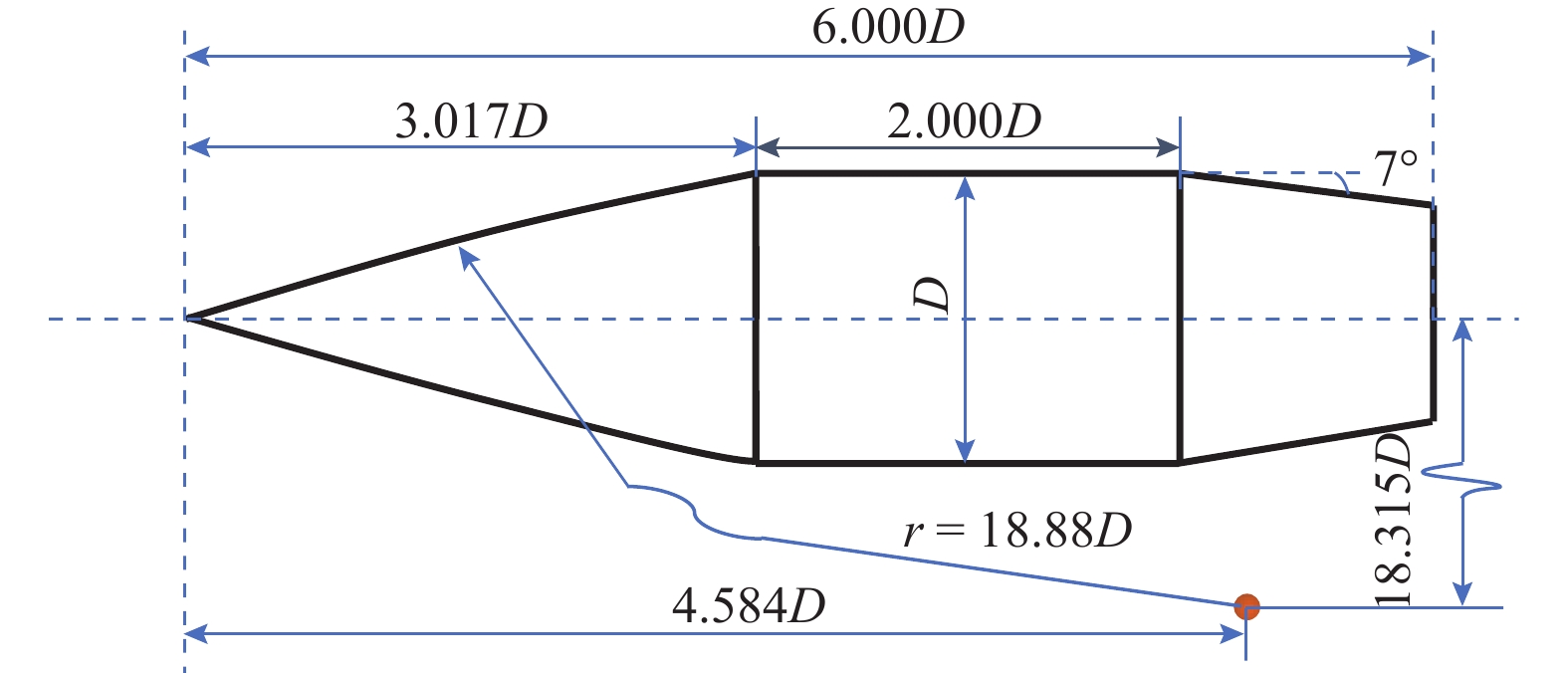
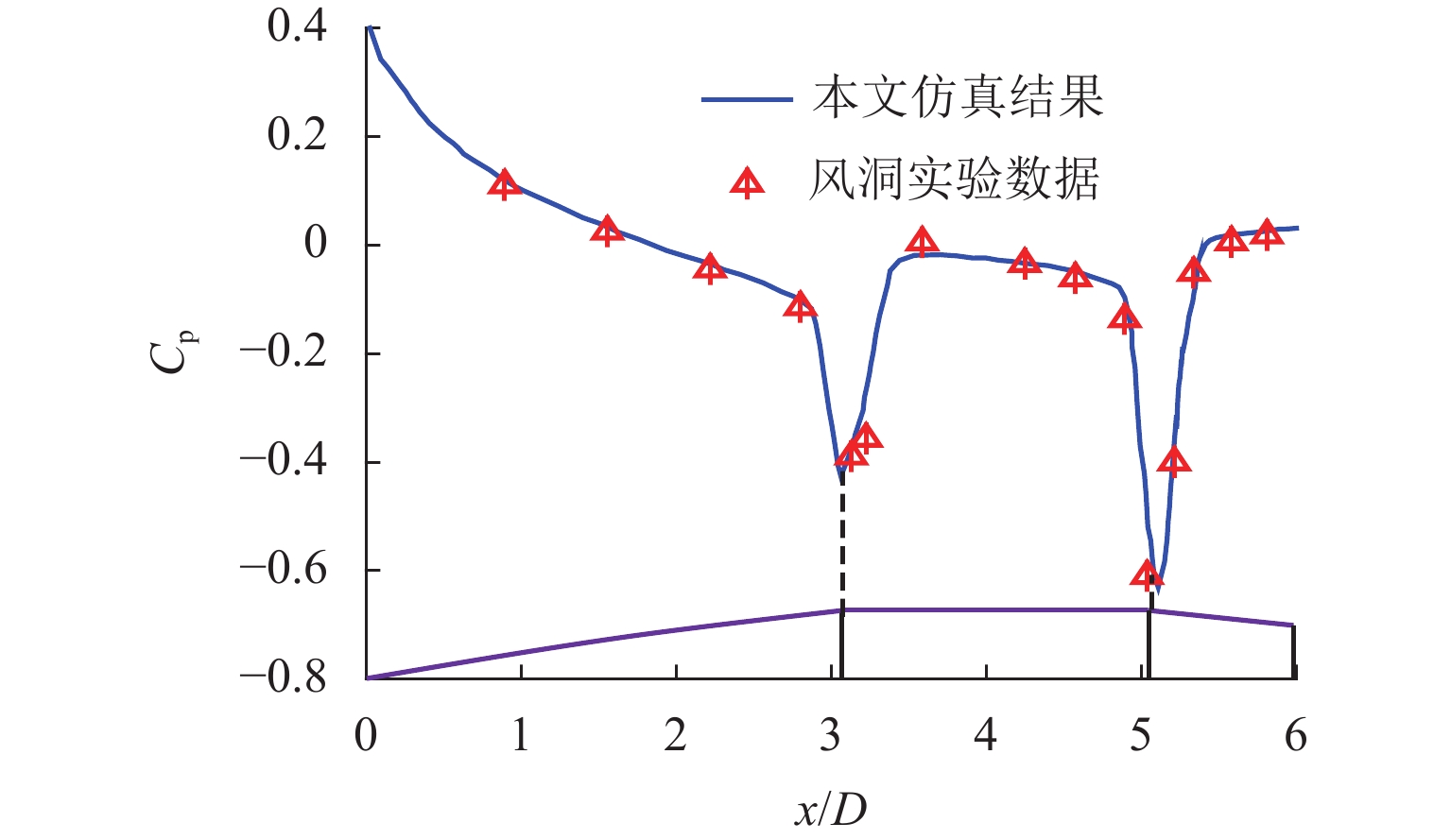
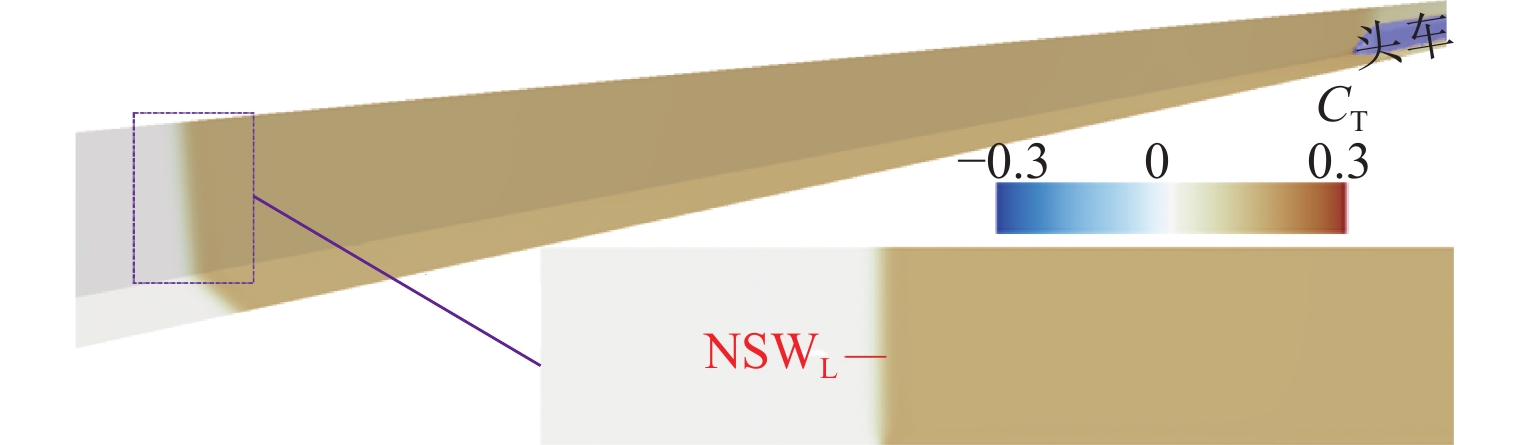
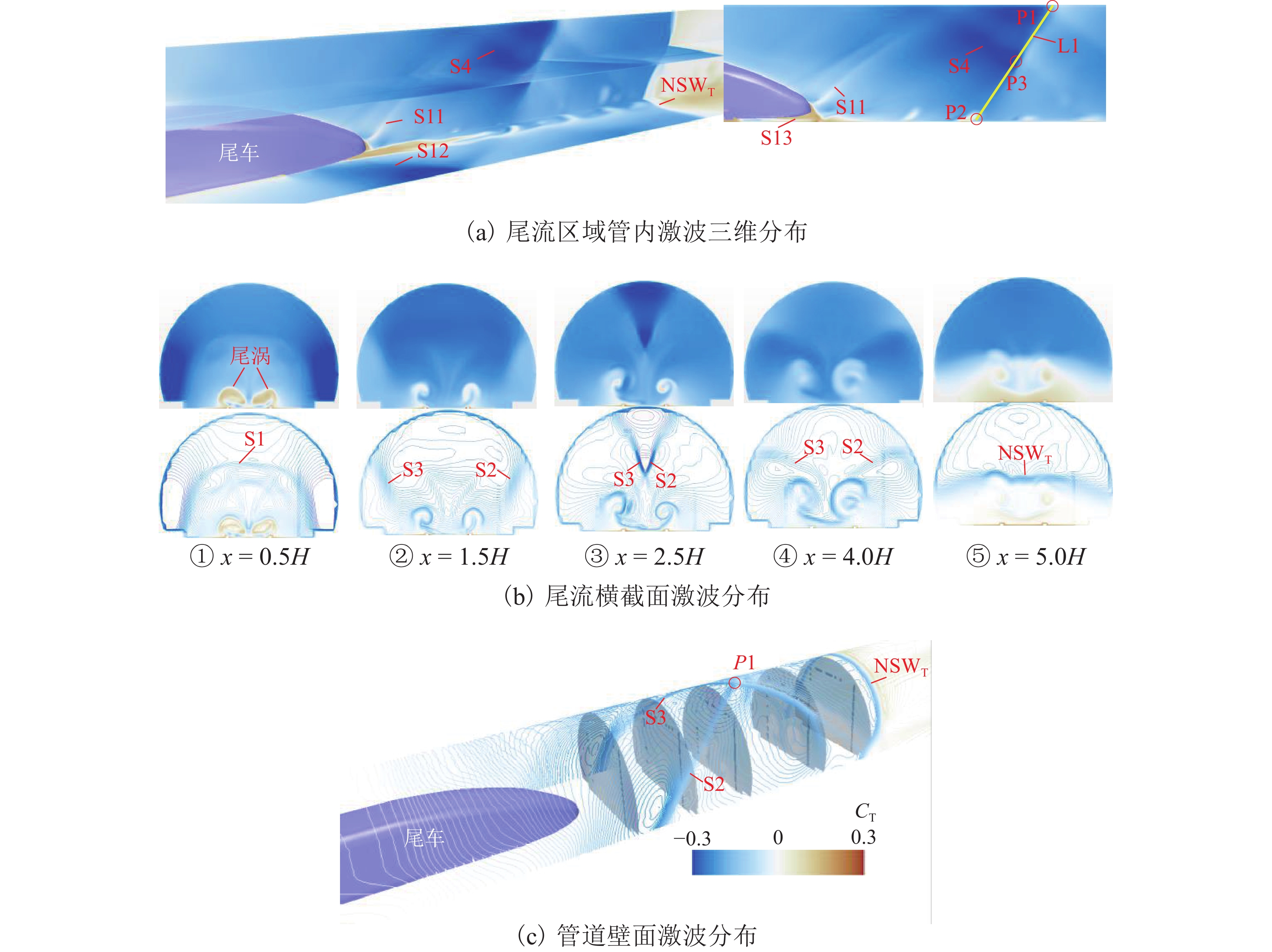
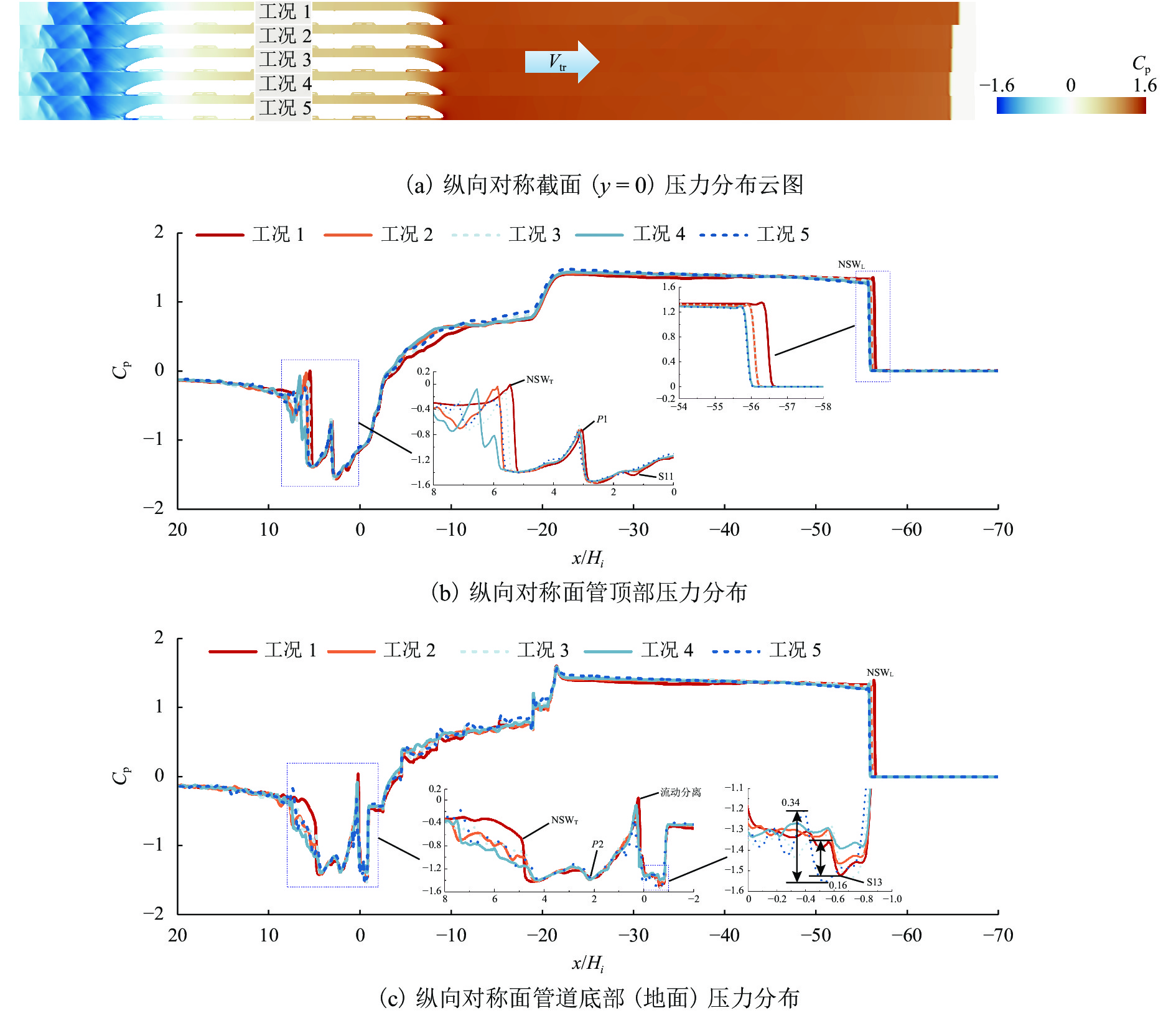
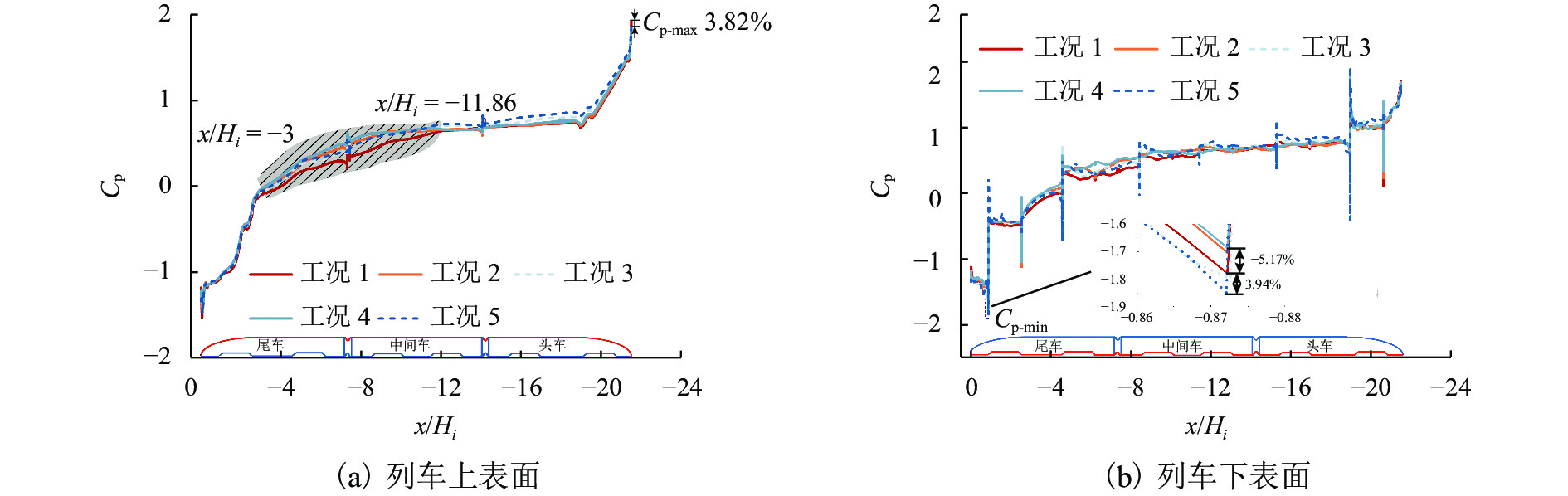
In order to investigate the effect of the scale of a tube train on wave systems, wake vortices, and aerodynamic loads, three model scales (1∶1, 1∶5, and 1∶10) were established based on computational fluid dynamics(CFD) software, and two types of suspension gap relationships (constant relative gap between tracks and constant absolute suspension height) were considered. The improved delayed detached eddy simulation (IDDES) turbulence model and the overlapping mesh method were utilized to simulate the train’s dynamic motion in the tube, and wind tunnel test data were used to validate the numerical method and mesh strategy. The study results demonstrate that as the train scale (Reynolds number) increases, the front piston region lengthens, and the wake disturbance region shrinks in extent; Reynolds number has less effect on vortex pair evolution in the near wake region, but in the far wake region, vortex pair pulsation becomes stronger as the train scale decreases, and the difference in vortex pair strength leads to differences in the normal shock wave pattern in the rear of the train; the maximum positive and negative pressure values on the train surface increase as the scale of the train increases; the suspension gap has less influence on the maximum positive pressure value, but it is positively correlated with the maximum negative pressure value. The scale effect affects the aerodynamic drag from both pressure drag and friction drag. The friction drag of the whole train and the pressure drag of the head and middle trains are positively related to the Reynolds number; the pressure drag of the tail train, however, is influenced by the strength of the attached shock wave in an opposite way. Both train scale and suspension height significantly affect the lift. Compared with the full-scale model, the 1∶10 model (suspension height of 20 mm) has a 3.82% reduction in maximum positive pressure, a 3.94% increase in maximum negative pressure, an 8.64% increase in total drag, a 101.56% reduction in the lift of the head train, and a 15.88% increase in the lift of the tail train.


 Advance Search
Advance Search
 Email alert
Email alert RSS
RSS [Abstract]
[Abstract] [FullText HTML]
[FullText HTML] PDF 1828KB
PDF 1828KB Supplements
Supplements [Cited By]
[Cited By]