- ISSN 0258-2724
- CN 51-1277/U
- EI Compendex
- Scopus
- Indexed by Core Journals of China, Chinese S&T Journal Citation Reports
- Chinese S&T Journal Citation Reports
- Chinese Science Citation Database

| Citation: | ZHANG Mingliang, YANG Xinmeng, ZHANG Lianpeng, LI Mingyuan, LIU Liru. Dynamic Characteristics and Performance Assessment of Improved Suspension Frame System[J]. Journal of Southwest Jiaotong University, 2023, 58(4): 827-835. doi: 10.3969/j.issn.0258-2724.20220885

|
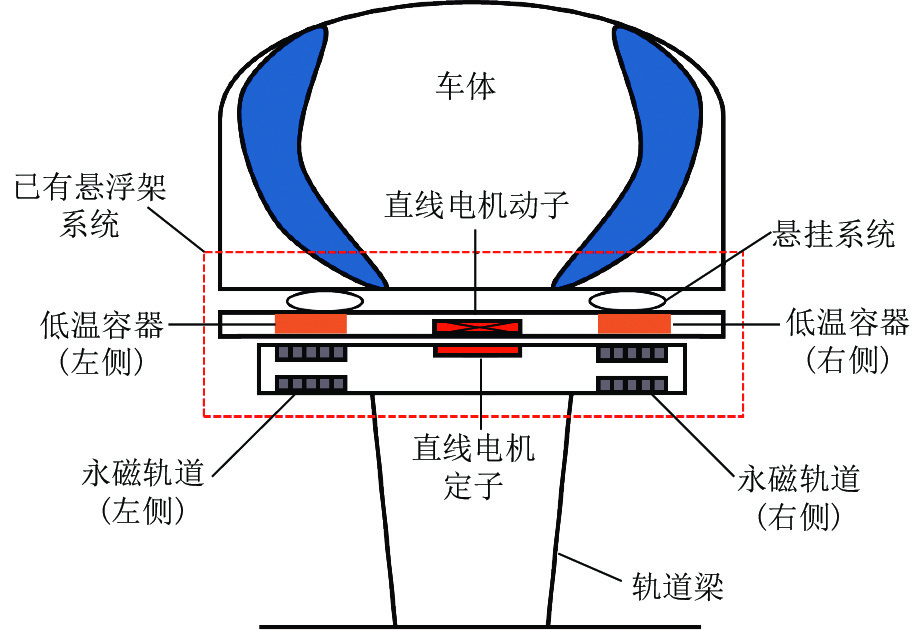
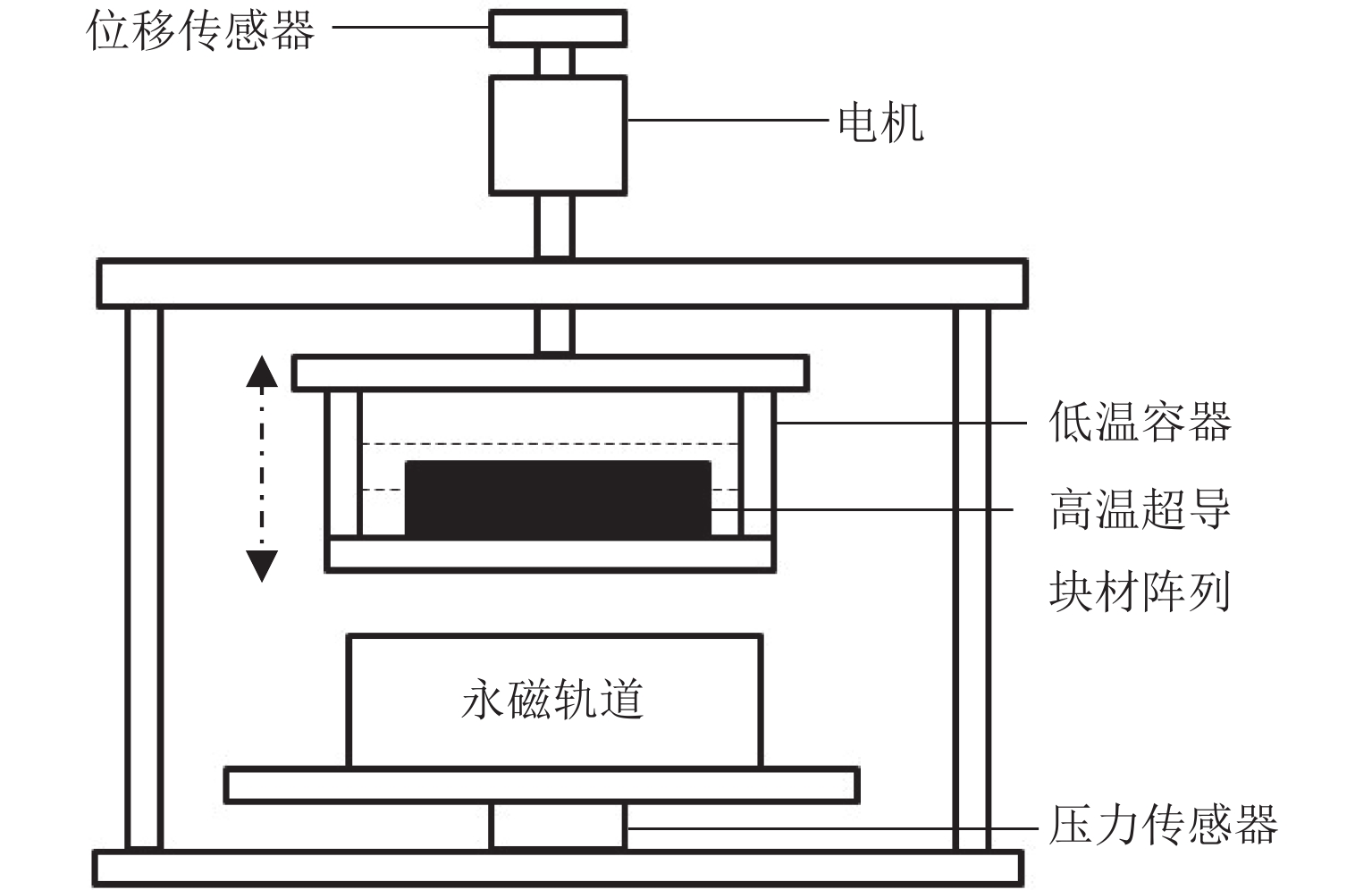
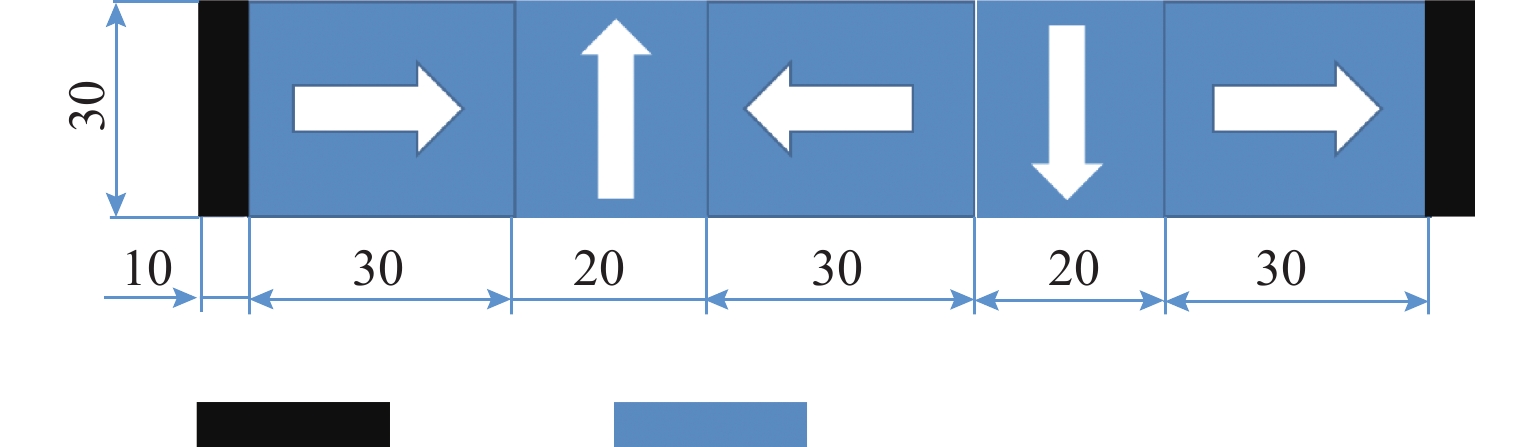
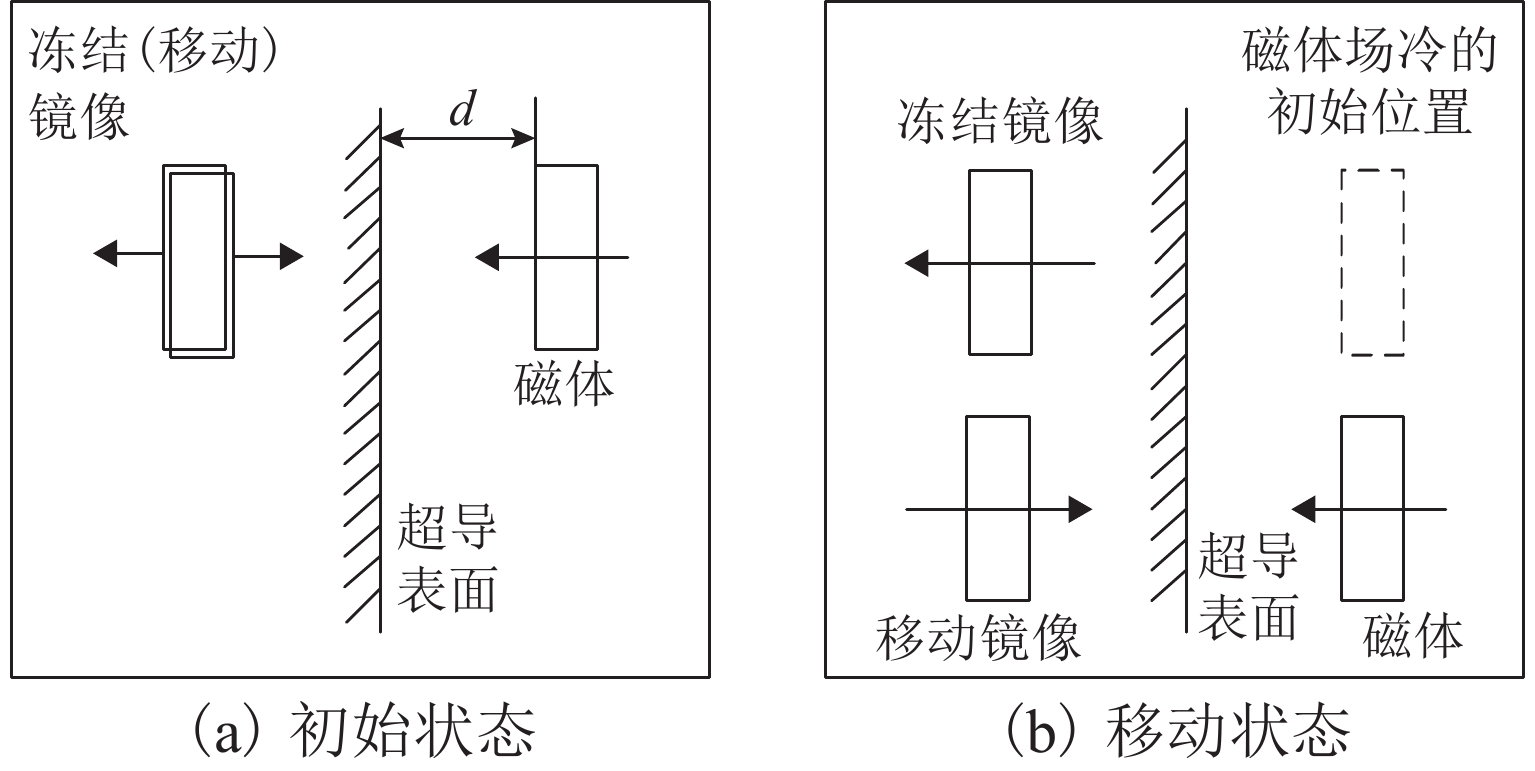
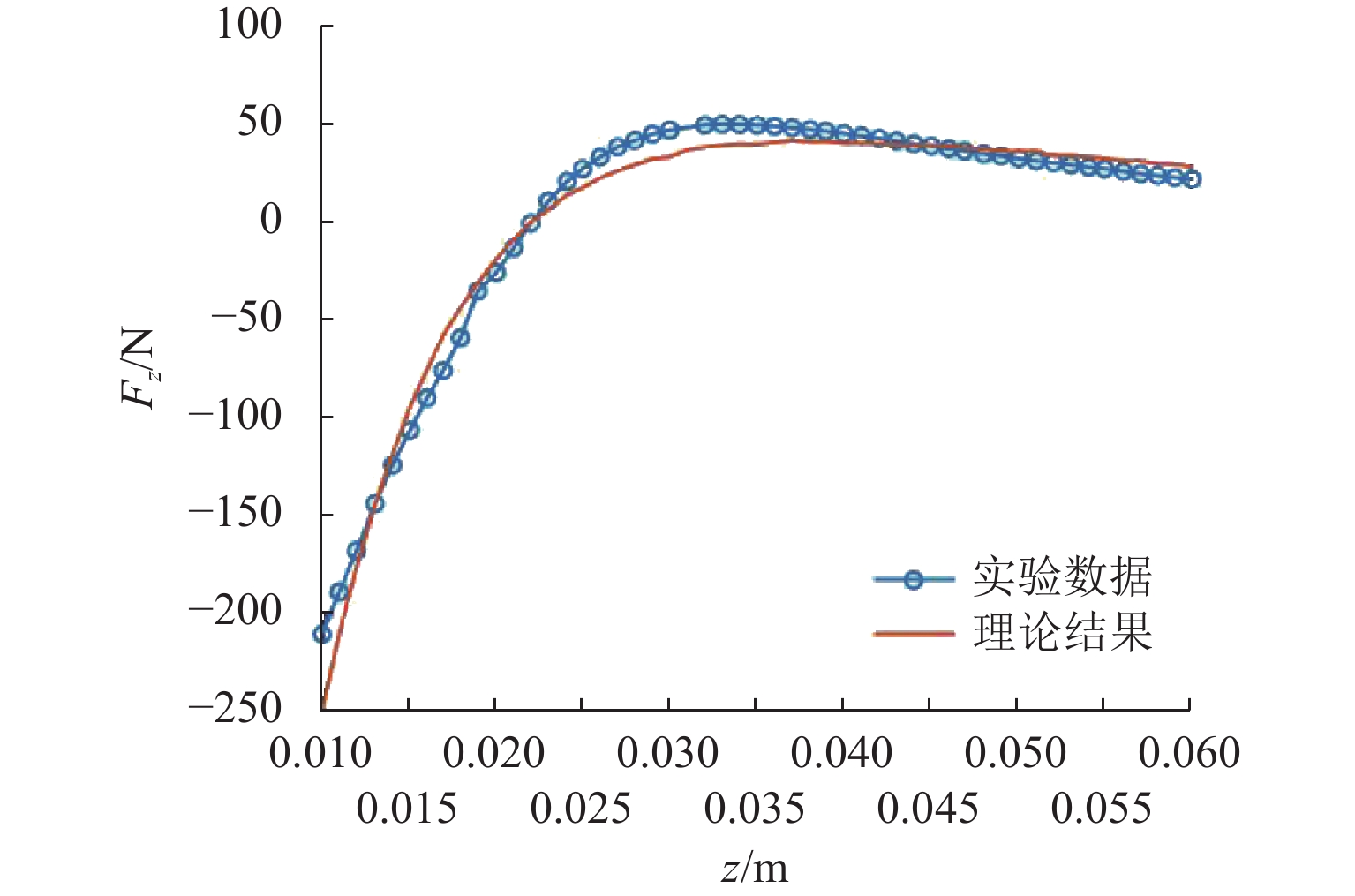
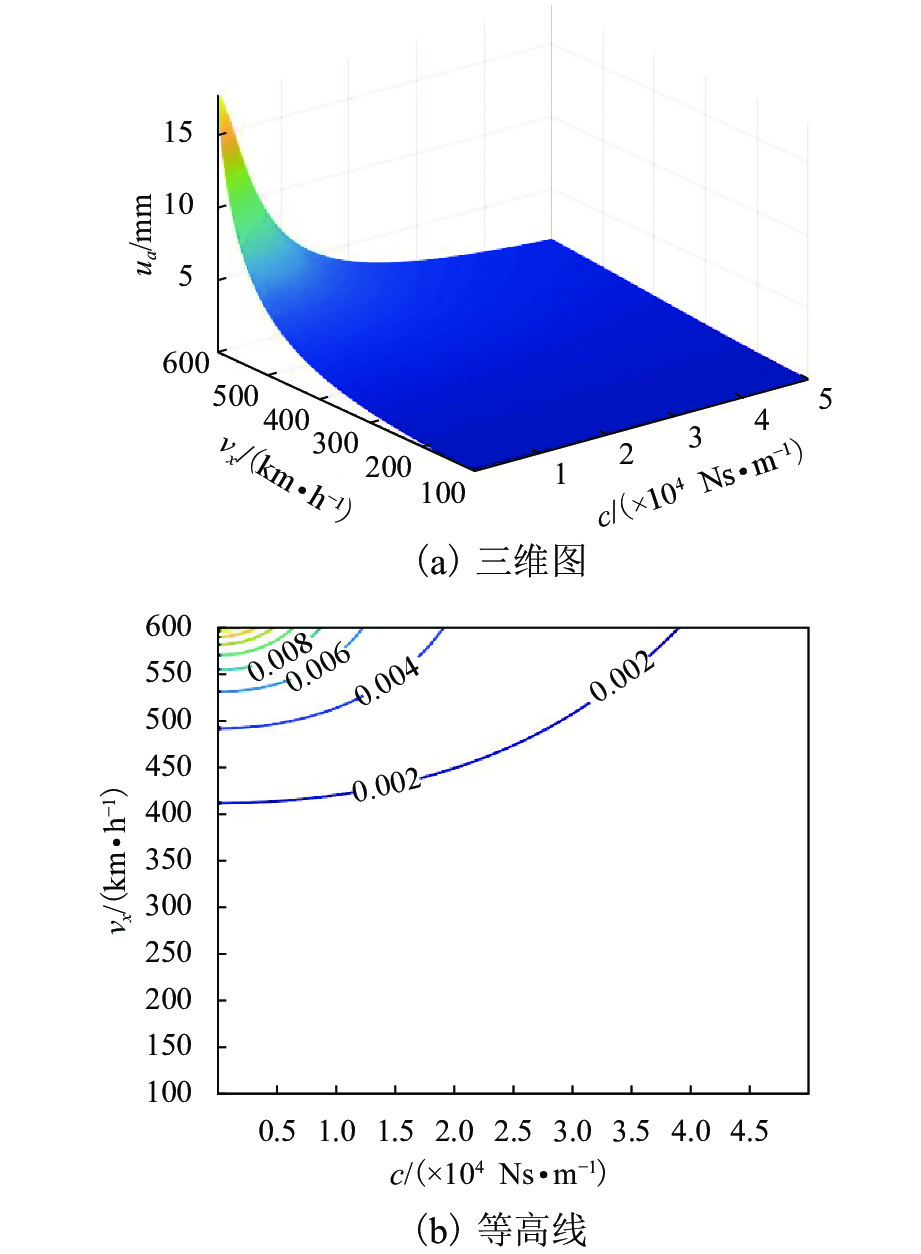
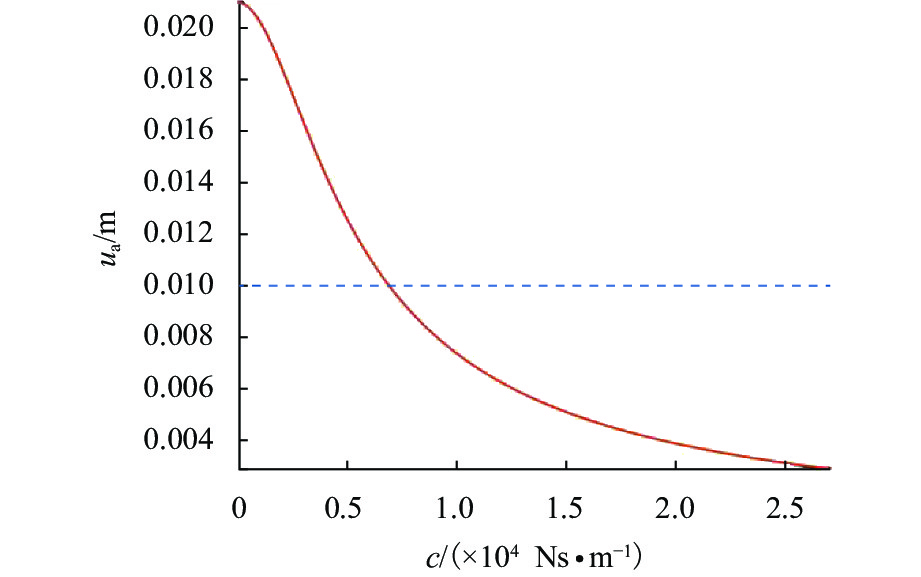
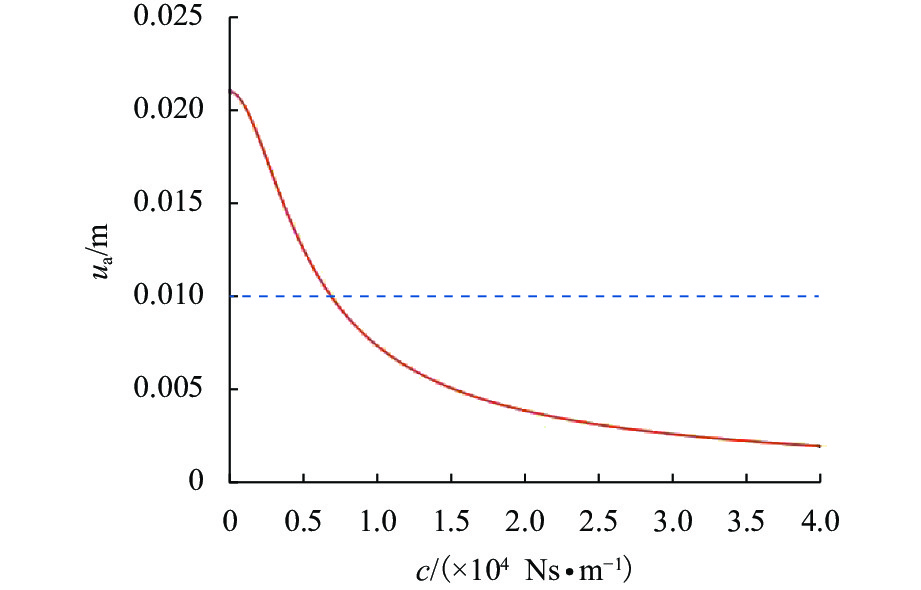
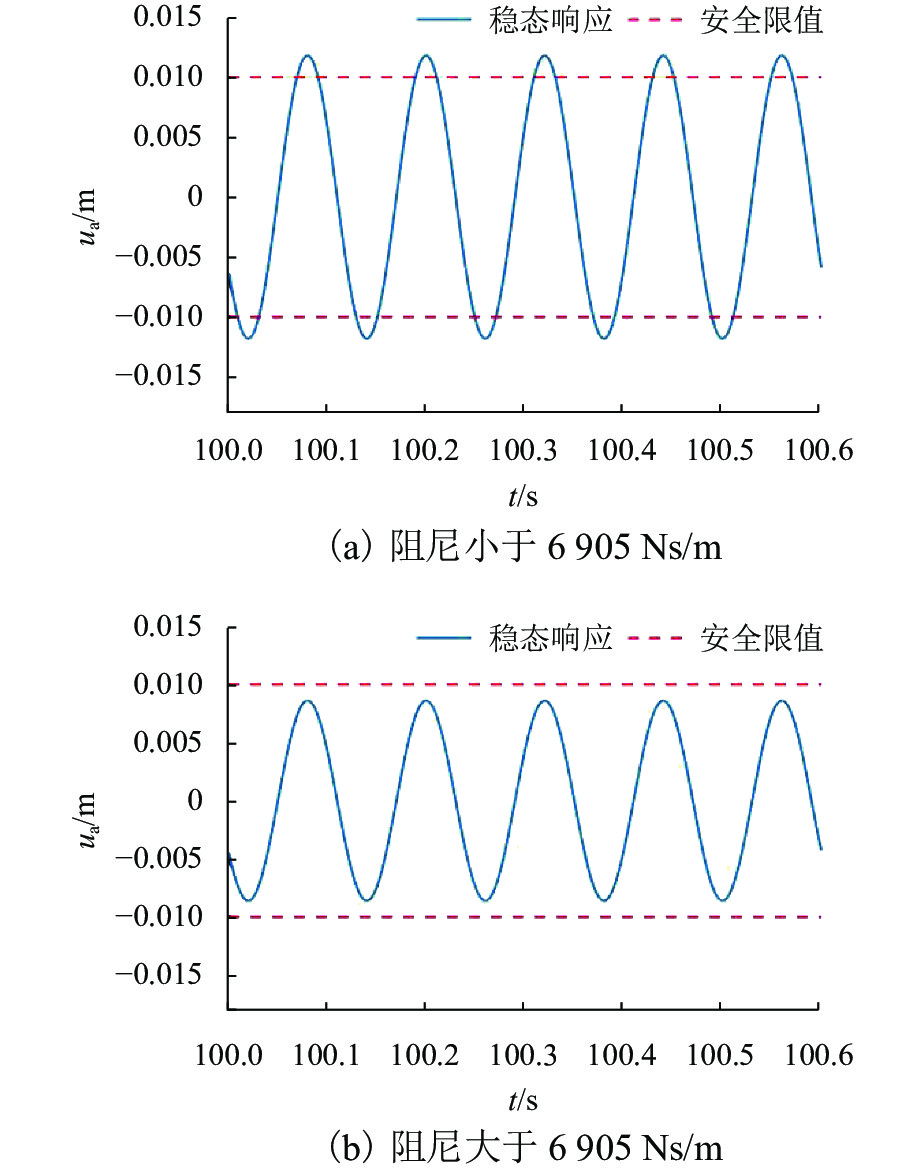
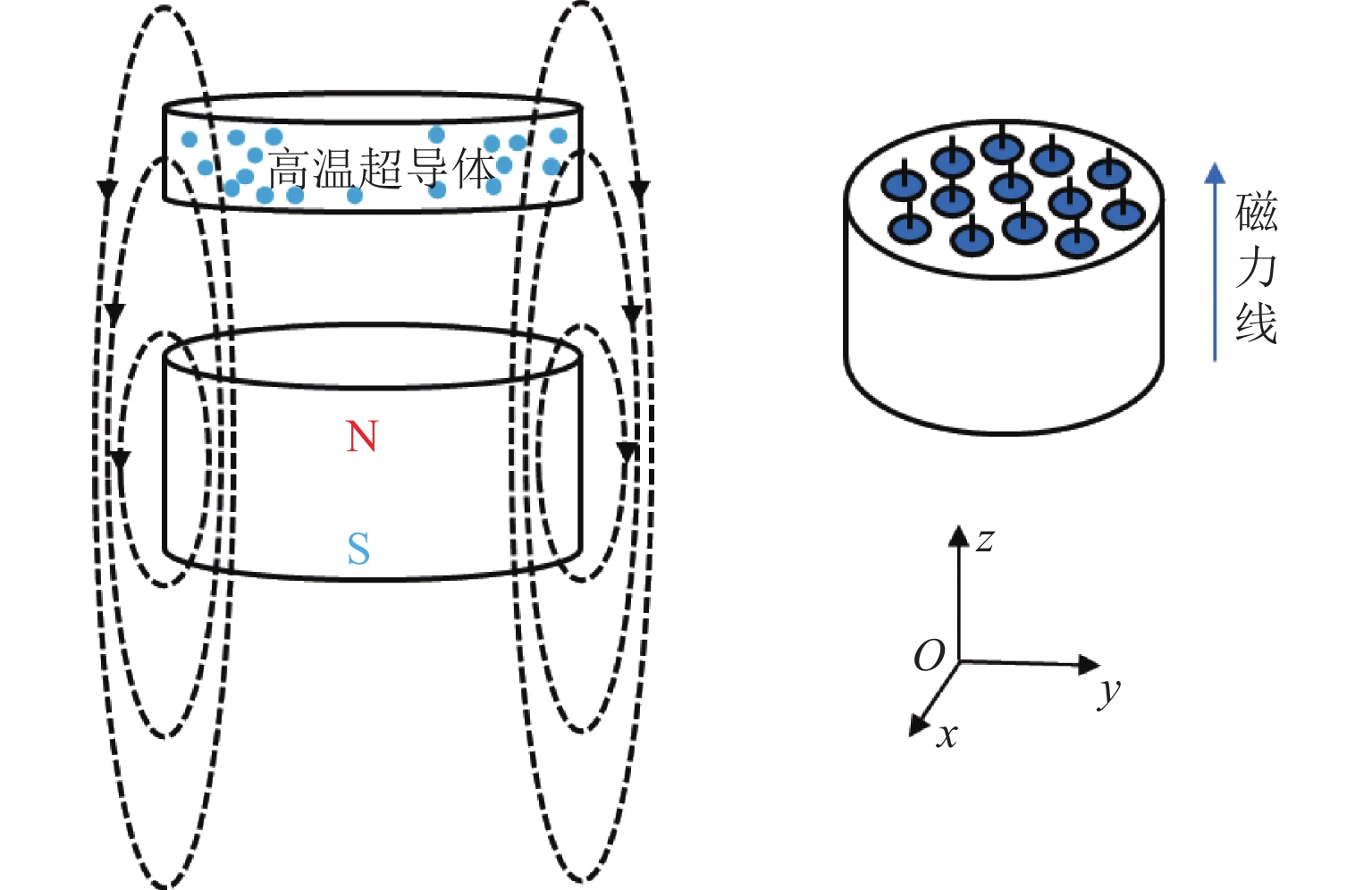
In order to improve the levitation force and enhance the safety of high-temperature superconducting pinned maglev trains, an improved rail-holding suspension frame system was proposed. Firstly, the levitation force between high-temperature superconductor arrays and permanent magnet guideways was calculated based on the equivalent processing method. The levitation forces of high-temperature superconductor arrays and permanent magnet guideways were also measured by the levitation force test device, which validated the equivalent processing method experimentally. Then, the levitation force of the improved suspension frame system was obtained based on the equivalent processing method. According to the relationship between levitation force and levitation gap, the dynamic model of a single improved suspension frame was set up under track irregularity harmonic excitation. The amplitude-frequency equation was derived by linear differential equation theory. Lastly, the influence of running velocity and damping on the steady-state amplitude was investigated. The feasible domain of damping under the maximum running velocity was obtained. The results show that the steady-state amplitude is dependent on the running velocity and damping under a certain mass, stiffness, and track irregularity wave length and amplitude. In addition, the steady-state amplitude increases as the running velocity improves, or as the damping decreases. With the maglev safety index as the constraint, the damping should be more than 6 905 Ns/m under the maximum running velocity of 600 km/h.

| [1] |
WANG J S, WANG S Y, ZENG Y W, et al. The first man-loading high temperature superconducting Maglev test vehicle in the world[J]. Physica C: Superconductivity, 2002, 378/379/380/381: 809-814.
|
| [2] |
肖玲,任洪涛,焦玉磊,等. YBCO超导体的磁悬浮力及其测量[J]. 低温物理学报,1999,21(4): 317-320.
XIAO Ling, REN Hongtao, JIAO Yulei, et al. Magnetic levitation force of YBCO superconductor and its measurement[J]. Low Temperature Physical Letters, 1999, 21(4): 317-320.
|
| [3] |
LIU W, WANG J S, LIAO X L, et al. Influence of the trapped field on the levitation performance of the magnetized bulk high-Tc superconductor[J]. Journal of Superconductivity and Novel Magnetism, 2011, 24(5): 1563-1569. doi: 10.1007/s10948-010-1058-4
|
| [4] |
闫兆盈,刘坤,杨文姣,等. 高温超导体在强磁外场下的磁悬浮性能仿真研究[J]. 低温物理学报,2018,40(4): 46-50.
YAN Zhaoying, LIU Kun, YANG Wenjiao, et al. Numerical studies of magnetic levitation performance of high temperature superconductor in strong magnetic field[J]. Low Temperature Physical Letters, 2018, 40(4): 46-50.
|
| [5] |
吴爽,方进. 永磁体尺寸对高温超导磁悬浮力的影响分析[J]. 低温与超导,2018,46(7): 38-42.
WU Shuang, FANG Jin. Analysis of the influence of permanent magnet size on high temperature superconducting magnetic suspension force[J]. Cryogenics & Superconductivity, 2018, 46(7): 38-42.
|
| [6] |
伊建辉,孟范鹏,姜衍猛,等. 高温超导磁悬浮列车静态悬浮特性研究[J]. 低温工程,2019(6): 56-61.
YI Jianhui, MENG Fanpeng, JIANG Yanmeng, et al. Study on static suspension characteristics of high temperature superconducting maglev train[J]. Cryogenics, 2019(6): 56-61.
|
| [7] |
张明亮,李明远,刘鹏飞,等. 面向高温超导钉扎磁悬浮列车悬浮特性研究[J]. 中国机械工程,2022,33(22): 2764-2771.
ZHANG Mingliang, LI Mingyuan, LIU Pengfei, et al. Study on levitation characteristics of high temperature superconducting pinned maglev train[J]. China Mechanical Engineering, 2022, 33(22): 2764-2771.
|
| [8] |
DENG Z G, ZHENG J, SONG H H, et al. Free vibration of the high temperature superconducting maglev vehicle model[J]. IEEE Transactions on Applied Superconductivity, 2007, 17(2): 2071-2074. doi: 10.1109/TASC.2007.899247
|
| [9] |
赵宪锋,周又和. 高温超导悬浮系统的磁刚度研究[J]. 兰州大学学报(自然科学版),2015,51(4): 577-582.
ZHAO Xianfeng, ZHOU Youhe. Magnetic stiffness of a high-temperature superconducting levitation system[J]. Journal of Lanzhou University (Natural Sciences), 2015, 51(4): 577-582.
|
| [10] |
杨文姣,马光同,Loic Queval,等. 基于三维多物理场强耦合模型的超导磁悬浮振动特性[J]. 科学通报,2019,64(31): 3255-3266.
YANG Wenjiao, MA Guangtong, QUEVAL L, et al. Vibration characteristics research on HTS magnetic levitation system based on a strong-coupled multi-physics model[J]. Chinese Science Bulletin, 2019, 64(31): 3255-3266.
|
| [11] |
邓斌,陈武,邓自刚,等. 新型高温超导磁浮车辆通过曲线时的运动学规律[J]. 城市轨道交通研究,2019,22(5): 34-38.
DENG Bin, CHEN Wu, DENG Zigang, et al. Kinematics law of high temperature superconducting maglev train in curve passing[J]. Urban Mass Transit, 2019, 22(5): 34-38.
|
| [12] |
ZHANG M L, SUN G X, LIU P F, et al. Research on force characteristics and running performance of novel type high-temperature superconductor magnetic levitation vehicle[J]. Journal of Superconductivity and Novel Magnetism, 2022, 35(3): 635-646. doi: 10.1007/s10948-021-06075-7
|
| [13] |
WEINBERGER B R, LYNDS L, HULL J R. Magnetic bearings using high-temperature superconductors: some practical considerations[J]. Superconductor Science and Technology, 1990, 3(7): 381-388. doi: 10.1088/0953-2048/3/7/010
|
| [14] |
ZHUO P J, ZHANG Z X, GOU X F. Chaotic motion of a magnet levitated over a superconductor[J]. IEEE Transactions on Applied Superconductivity, 2016, 26(2): 1-6.
|
| [15] |
LI J P, LI H T, ZHENG J, et al. Nonlinear vibration behaviors of high-Tc superconducting bulks in an applied permanent magnetic array field[J]. Journal of Applied Physics, 2017, 121: 243901.1-243901.6.
|
| [16] |
LI J P, ZHENG J, HUANG H A, et al. Motion stability of the magnetic levitation and suspension with YBa2Cu3O7- x high-Tc superconducting bulks and NdFeB magnets[J]. Journal of Applied Physics, 2017, 122: 153902.1-153902.8.
|
| [17] |
LI H T, DENG Z G, JIN L A, et al. Lateral motion stability of high-temperature superconducting maglev systems derived from a nonlinear guidance force hysteretic model[J]. Superconductor Science and Technology, 2018, 31: 075010.1-075010.8.
|
| [18] |
LI J P, DENG Z G, XIA C C, et al. Subharmonic resonance in magnetic levitation of the high-temperature superconducting bulks YBa2Cu3O7-x under harmonic excitation[J]. IEEE Transactions on Applied Superconductivity, 2019, 29(4): 1-8.
|
| [19] |
邓自刚,刘宗鑫,李海涛,等. 磁悬浮列车发展现状与展望[J]. 西南交通大学学报,2022,57(3): 455-474,530.
DENG Zigang, LIU Zongxin, LI Haitao, et al. Development status and prospect of maglev train[J]. Journal of Southwest Jiaotong University, 2022, 57(3): 455-474,530.
|
| [20] |
ZHANG M L, HAN Y J, GUO X, et al. The connection characteristics of flux pinned docking interface[J]. Journal of Applied Physics, 2017, 121: 113907.1-113907.10.
|
| [21] |
LI J P, DENG Z G, XIA C C, et al. Subharmonic resonance in magnetic levitation of the high-temperature superconducting bulks YBa2Cu3O7-x under harmonic excitation[J]. IEEE Transactions on Applied Superconductivity, 2019, 29(4): 3600908.1-3600908.8.
|
Figures(19)


 DownLoad:
DownLoad: