- ISSN 0258-2724
- CN 51-1277/U
- EI Compendex
- Scopus
- Indexed by Core Journals of China, Chinese S&T Journal Citation Reports
- Chinese S&T Journal Citation Reports
- Chinese Science Citation Database

| Citation: | YANG Da, FENG Tingwei, ZHONG Jiayue, ZHENG Bin, YANG Guo. Lane Selection of Automated Vehicle Groups Approaching Intersections Based on Vehicle–Infrastructure Cooperation[J]. Journal of Southwest Jiaotong University, 2025, 60(5): 1250-1258, 1314. doi: 10.3969/j.issn.0258-2724.20230216

|
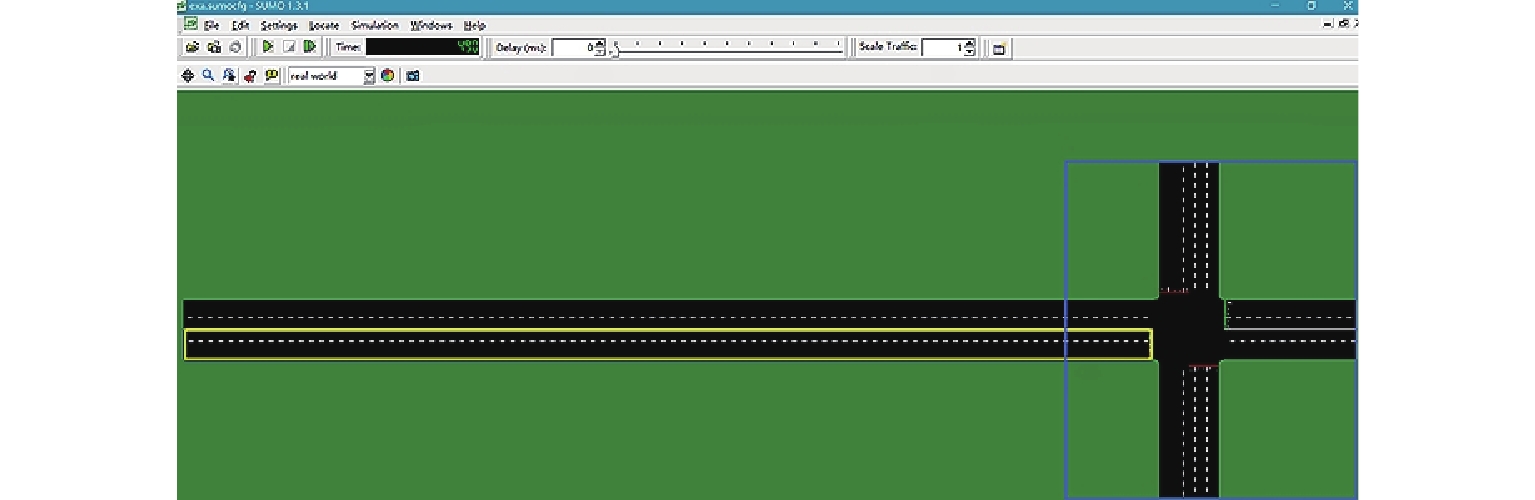
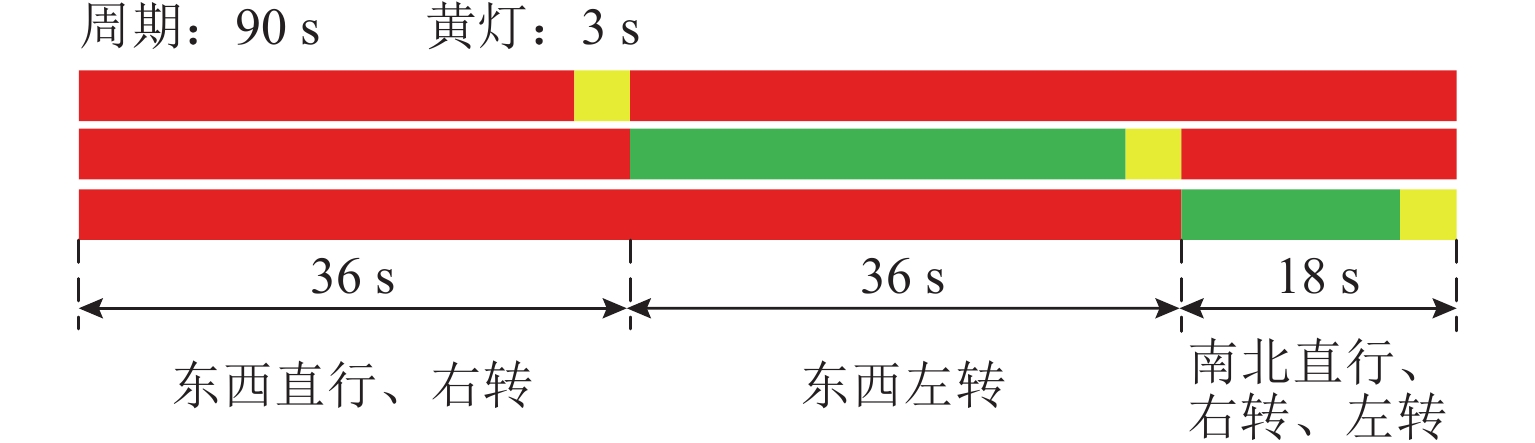
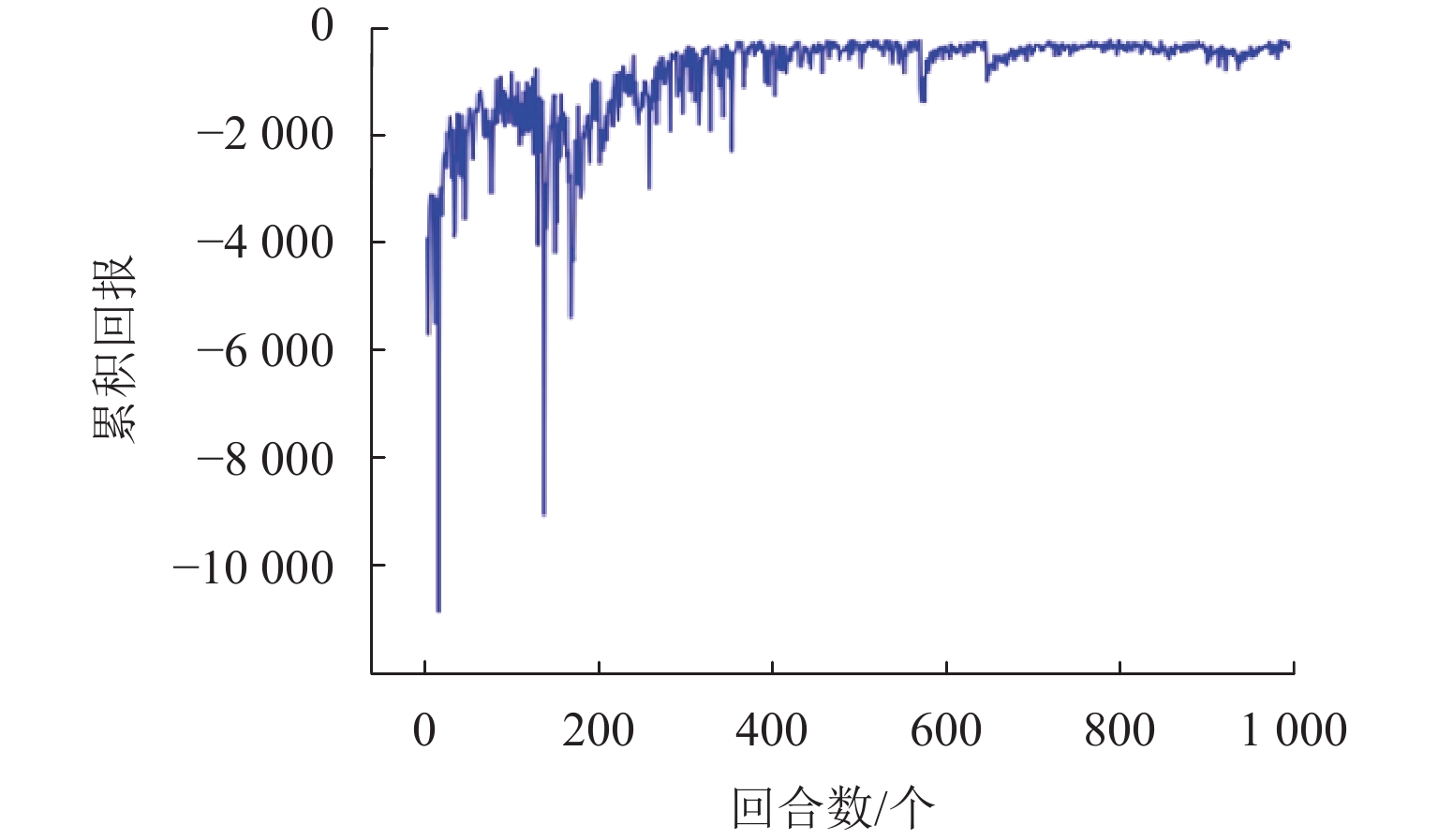
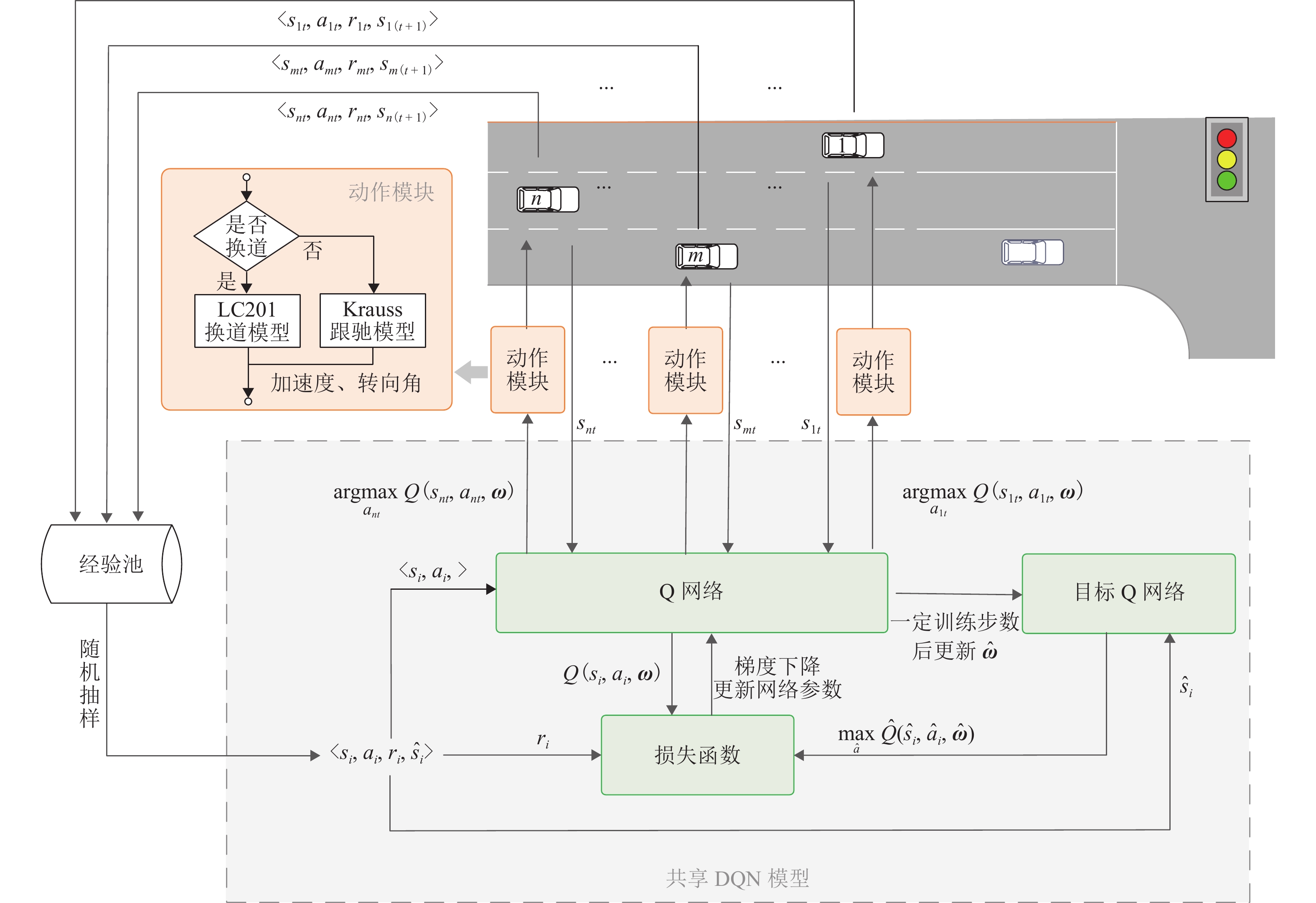
In front of signalized intersections, frequent lane-changing and turning maneuvers often lead to conflict and reduced traffic efficiency. To address this issue, a shared deep Q-network (DQN)-based reinforcement learning framework was developed for vehicle group control, aiming to optimize lane selection. Firstly, real-time state information on surrounding vehicles and intersection signal lights was obtained using sensing and connected devices. Lane selection was then carried out based on the shared DQN model, and the vehicle’s next position, speed, and steering angle were calculated accordingly. A reward function incorporating efficiency and safety indicators was then constructed to evaluate lane selection decisions. The state, decision, and reward evaluation information were integrated into experience and stored in a shared experience pool to iteratively update the parameters of the shared DQN model. Finally, simulation of urban mobility (SUMO) and Python were used to simulate different traffic scenarios to verify the trained model. Experimental results show that, compared with the lane selection model in SUMO, the proposed shared DQN-based lane selection model for vehicle groups approaching signalized intersections improves average speeds in low, medium, and high traffic scenarios, while reducing queue lengths before intersections by 9.6%, 22.5%, and 24.8%, respectively. The model can effectively reduce the queue length at signal intersections, increase average speeds on road sections before signalized intersections, and improve the efficiency of vehicles arriving at the intersection from upstream, providing a theoretical reference and technical support for future application of vehicle–infrastructure cooperation.

| [1] |
ZHANG H Y, DU L L. Platoon-centered control for eco-driving at signalized intersection built upon hybrid MPC system, online learning and distributed optimization part I: Modeling and solution algorithm design[J]. Transportation Research Part B: Methodological, 2023, 172: 174-198. doi: 10.1016/j.trb.2023.02.006
|
| [2] |
金立生, 郭柏苍, 谢宪毅, 等. 基于行车安全场模型的交叉口车辆控制算法[J]. 西南交通大学学报, 2022, 57(4): 753-760. doi: 10.3969/j.issn.0258-2724.20200482
JIN Lisheng, GUO Baicang, XIE Xianyi, et al. Cooperative control algorithm for vehicle at intersection based on driving safety field model[J]. Journal of Southwest Jiaotong University, 2022, 57(4): 753-760. doi: 10.3969/j.issn.0258-2724.20200482
|
| [3] |
张游, 潘福全, 张丽霞, 等. 车路协同环境下智能交叉口车速控制[J]. 控制理论与应用, 2022, 39(6): 1057-1064. doi: 10.7641/CTA.2021.10606
ZHANG You, PAN Fuquan, ZHANG Lixia, et al. Speed control for intelligent intersection under vehicle-infrastructure cooperative environment[J]. Control Theory & Applications, 2022, 39(6): 1057-1064. doi: 10.7641/CTA.2021.10606
|
| [4] |
PARK C, KEE S C. Implementation of autonomous driving vehicle at an intersection with traffic light recognition and vehicle controls[C]//Proceedings of the 5th International Conference on Vehicle Technology and Intelligent Transport Systems. Greece: Science and Technology Publications (SCITEPRESS), 2019: 542-549.
|
| [5] |
ZHOU M F, YU Y, QU X B. Development of an efficient driving strategy for connected and automated vehicles at signalized intersections: a reinforcement learning approach[J]. IEEE Transactions on Intelligent Transportation Systems, 21(1): 433-443.
|
| [6] |
TAJEDDIN S, EKHTIARI S, FAIEGHI M, et al. Ecological adaptive cruise control with optimal lane selection in connected vehicle environments[J]. IEEE Transactions on Intelligent Transportation Systems, 21(11): 4538-4549.
|
| [7] |
KUMAR A V S S B, MODH A, BABU M, et al. A novel lane merging framework with probabilistic risk based lane selection using time scaled collision cone[C]//2018 IEEE Intelligent Vehicles Symposium (IV). Changshu: IEEE, 2018: 1406-1411.
|
| [8] |
BAKER C R, DOLAN J M. Traffic interaction in the urban challenge: putting boss on its best behavior[C]// 2008 IEEE/RSJ International Conference on Intelligent Robots and Systems. Nice: IEEE, 2008: 1752-1758.
|
| [9] |
MONTEMERLO M, BECKER J, BHAT S, et al. Junior: the stanford entry in the urban challenge[J]. Journal of Field Robotics, 2008, 25(9): 569-597. doi: 10.1002/rob.20258
|
| [10] |
GINDELE T, JAGSZENT D, PITZER B, et al. Design of the planner of team AnnieWAY’s autonomous vehicle used in the DARPA Urban Challenge 2007[C]//2008 IEEE Intelligent Vehicles Symposium. Eindhoven. Eindhoven: IEEE, 2008: 1131-1136.
|
| [11] |
杨达, 杨果, 罗旭, 等. 考虑前车状态的智能网联车交叉口行为决策[J]. 西南交通大学学报, 2022, 57(2): 410-417, 433. doi: 10.3969/j.issn.0258-2724.20200553
YANG Da, YANG Guo, LUO Xu, et al. Behavior decision of intelligent connected vehicles considering status of preceding vehicles at intersections[J]. Journal of Southwest Jiaotong University, 2022, 57(2): 410-417, 433. doi: 10.3969/j.issn.0258-2724.20200553
|
| [12] |
KANARIS A, KOSMATOPOULOS E B, LOANNOU P A. Strategies and spacing requirements for lane changing and merging in automated highway systems[J]. IEEE Transactions on Vehicular Technology, 50(6): 1568-1581.
|
| [13] |
裴晓飞, 莫烁杰, 陈祯福, 等. 基于TD3算法的人机混驾交通环境自动驾驶汽车换道研究[J]. 中国公路学报, 2021, 34(11): 246-254. doi: 10.3969/j.issn.1001-7372.2021.11.020
PEI Xiaofei, MO Shuojie, CHEN Zhenfu, et al. Lane changing of autonomous vehicle based on TD3 algorithm in human-machine hybrid driving environment[J]. China Journal of Highway and Transport, 2021, 34(11): 246-254. doi: 10.3969/j.issn.1001-7372.2021.11.020
|
| [14] |
赵建东, 贺晓宇, 余智鑫, 等. 多网联范围下的智能网联车换道决策组合模型研究[J]. 交通运输系统工程与信息, 2023, 23(1): 77-85.
ZHAO Jiandong, HE Xiaoyu, YU Zhixin, et al. A combination model for connected and autonomous vehicles lane-changing decision-making under multi connectivity range[J]. Journal of Transportation Systems Engineering and Information Technology, 2023, 23(1): 77-85.
|
| [15] |
LIU K, WAN Q, LI Y J. A deep reinforcement learning algorithm with expert demonstrations and supervised loss and its application in autonomous driving[C]//2018 37th Chinese Control Conference (CCC). Wuhan: IEEE, 2018: 2944-2949.
|
| [16] |
李传耀, 张帆, 王涛, 等. 基于深度强化学习的道路交叉口生态驾驶策略研究[J]. 交通运输系统工程与信息, 2024, 24(1): 81-92.
LI Chuanyao, ZHANG Fan, WANG Tao, et al. Signalized intersection eco-driving strategy based on deep reinforcement learning[J]. Journal of Transportation Systems Engineering and Information Technology, 2024, 24(1): 81-92.
|
| [17] |
CHEN Y L, DONG C Y, PALANISAMY P, et al. Attention-based hierarchical deep reinforcement learning for lane change behaviors in autonomous driving[C]//2019 IEEE/CVF Conference on Computer Vision and Pattern Recognition Workshops (CVPRW). Changsha: IEEE, 2019: 3697-3703.
|
| [18] |
KRAUß S. Towards a unified view of microscopic traffic flow theories[J]. IFAC Proceedings Volumes, 1997, 30(8): 901-905. doi: 10.1016/S1474-6670(17)43936-X
|
| [19] |
KRAUSS S, WAGNER P, GAWRON C. Metastable states in a microscopic model of traffic flow[J]. Physical Review E, 1997, 55(5): 5597-5602. doi: 10.1103/PhysRevE.55.5597
|
| [20] |
BEHRISCH M, WEBER M. Modeling mobility with open data[C]//2nd SUMO Conference 2014 Berlin. Berlin: Springer, 2014: 102-111.
|
| [21] |
ERDMANN J. SUMO’s lane-changing model[M]. Cham: Springer, 2015: 105-123.
|
| [22] |
JIANG X, ZHANG J, LI D. Eco-driving at signalized intersections: a parameterized reinforcement learning approach[J]. Transportmetrica B: Transport Dynamics, 2023, 11(1): 1406-1431. doi: 10.1080/21680566.2023.2215957
|
| [23] |
PENG M, FENG P F, LIANG Z J, et al. The hardware in-loop simulation system based on SUMO for autonomous optimization control algorithm at intersection[C]//2020 IEEE 3rd International Conference on Electronics Technology (ICET). Chengdu: IEEE, 2020: 591-596.
|
| [24] |
YANG X X, XU Y S, KUANG L, et al. An information fusion approach to intelligent traffic signal control using the joint methods of multiagent reinforcement learning and artificial intelligence of things[J]. IEEE Transactions on Intelligent Transportation Systems, 2022, 23(7): 9335-9345. doi: 10.1109/TITS.2021.3105426
|
Figures(4) / Tables(5)



 DownLoad:
DownLoad: