- ISSN 0258-2724
- CN 51-1277/U
- EI Compendex
- Scopus
- Indexed by Core Journals of China, Chinese S&T Journal Citation Reports
- Chinese S&T Journal Citation Reports
- Chinese Science Citation Database

| Citation: | WANG Tao, HUANG Jingchun, ZHOU Xingzhi, JIN Jing. Sensorless Control of Permanent Magnet Synchronous Motor Based on Improved Super-Twisting Sliding Mode Observer[J]. Journal of Southwest Jiaotong University, 2025, 60(2): 445-453. doi: 10.3969/j.issn.0258-2724.20220793

|
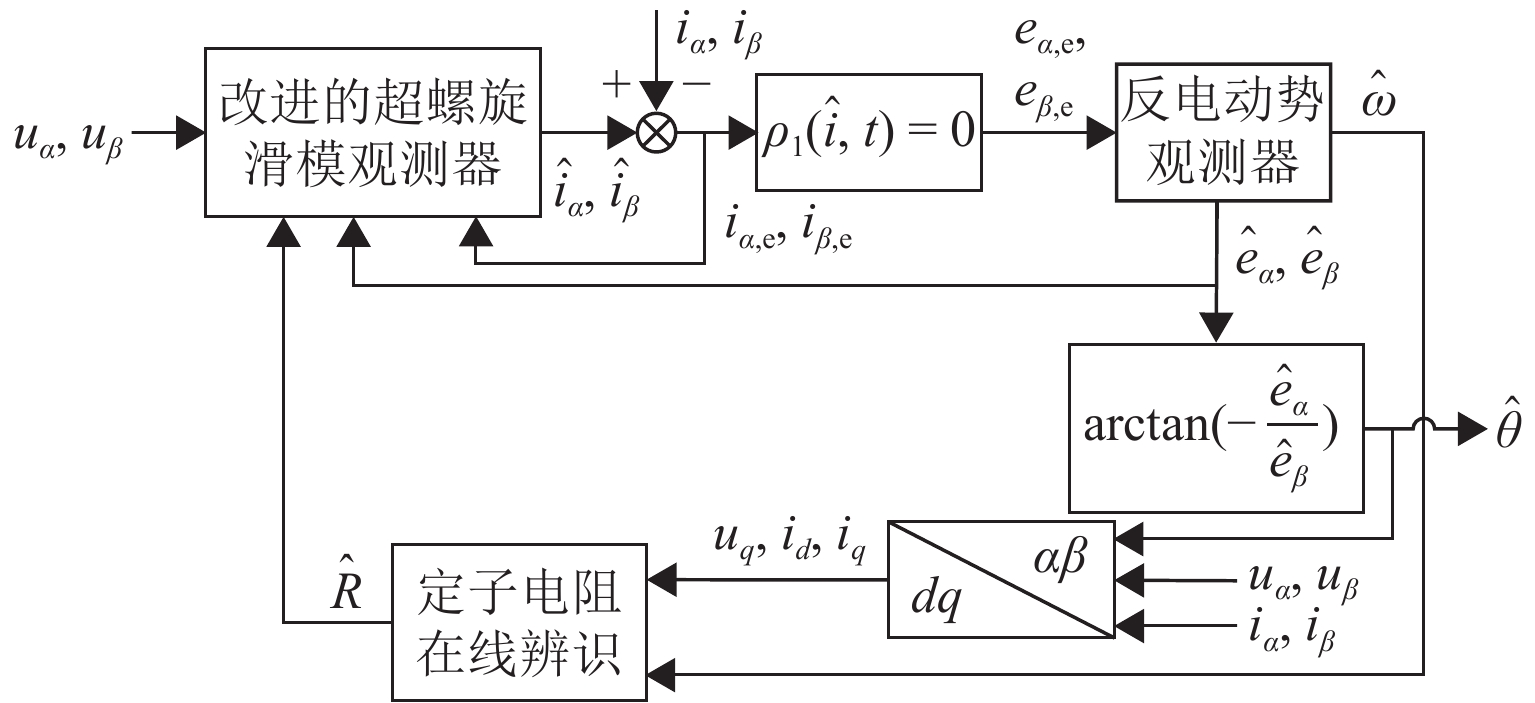
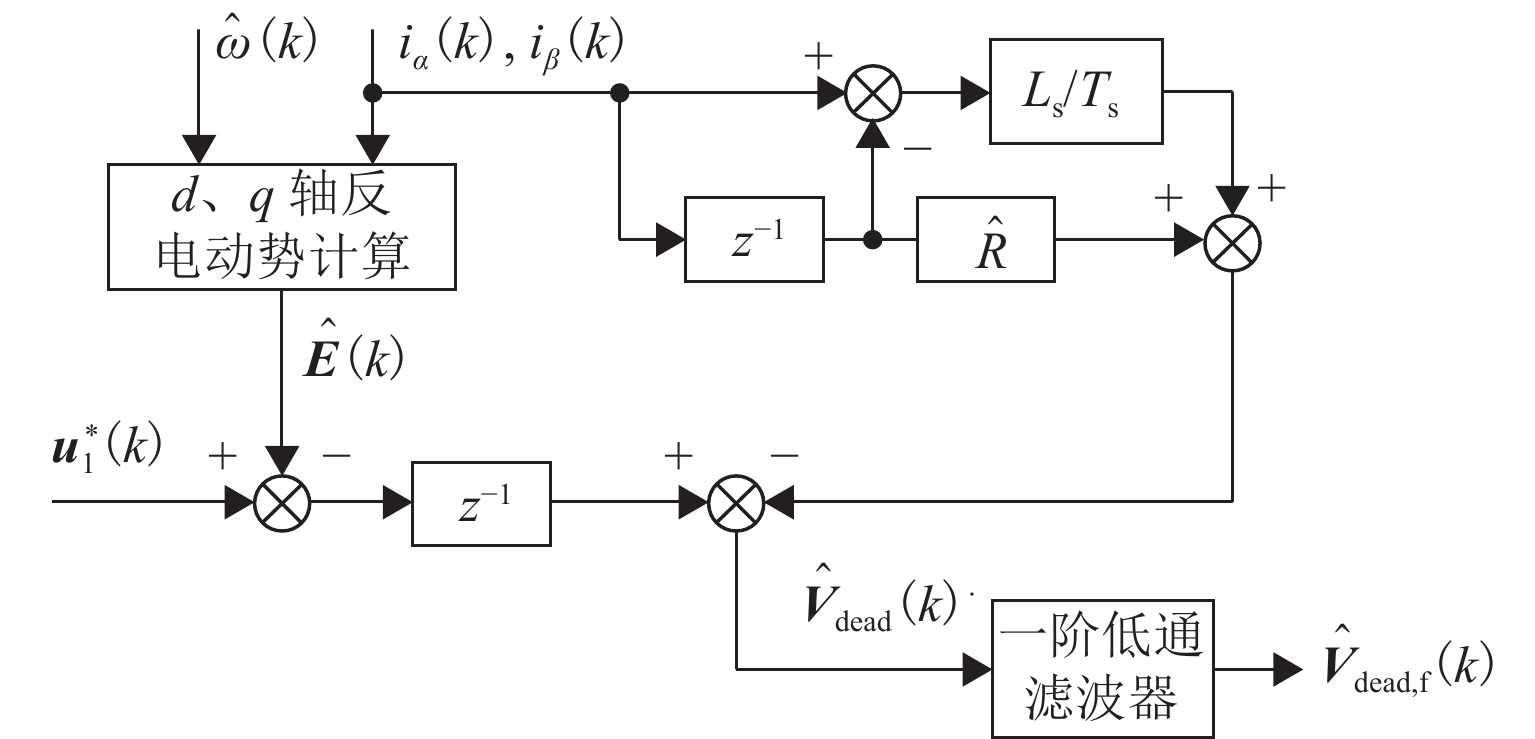
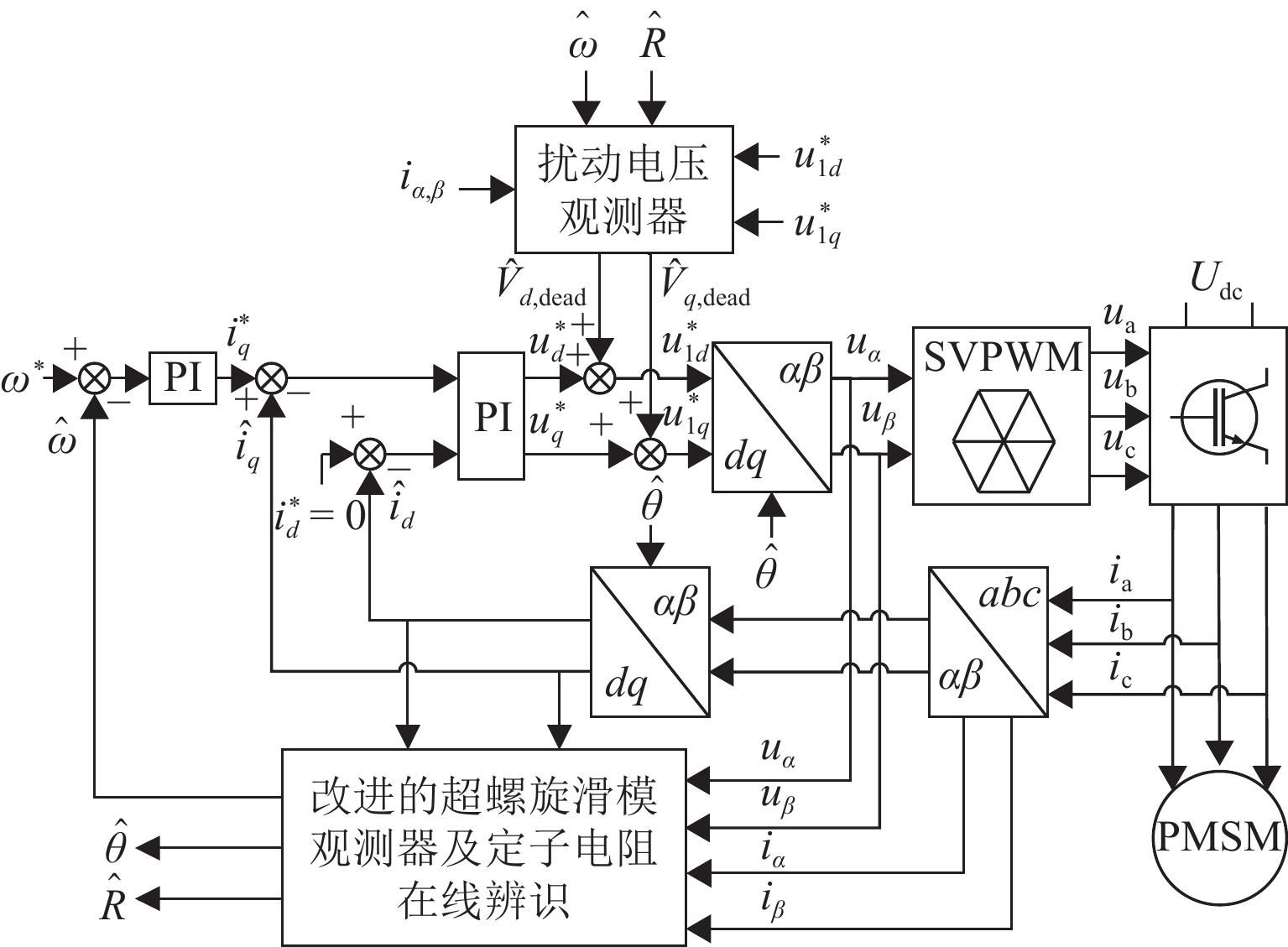
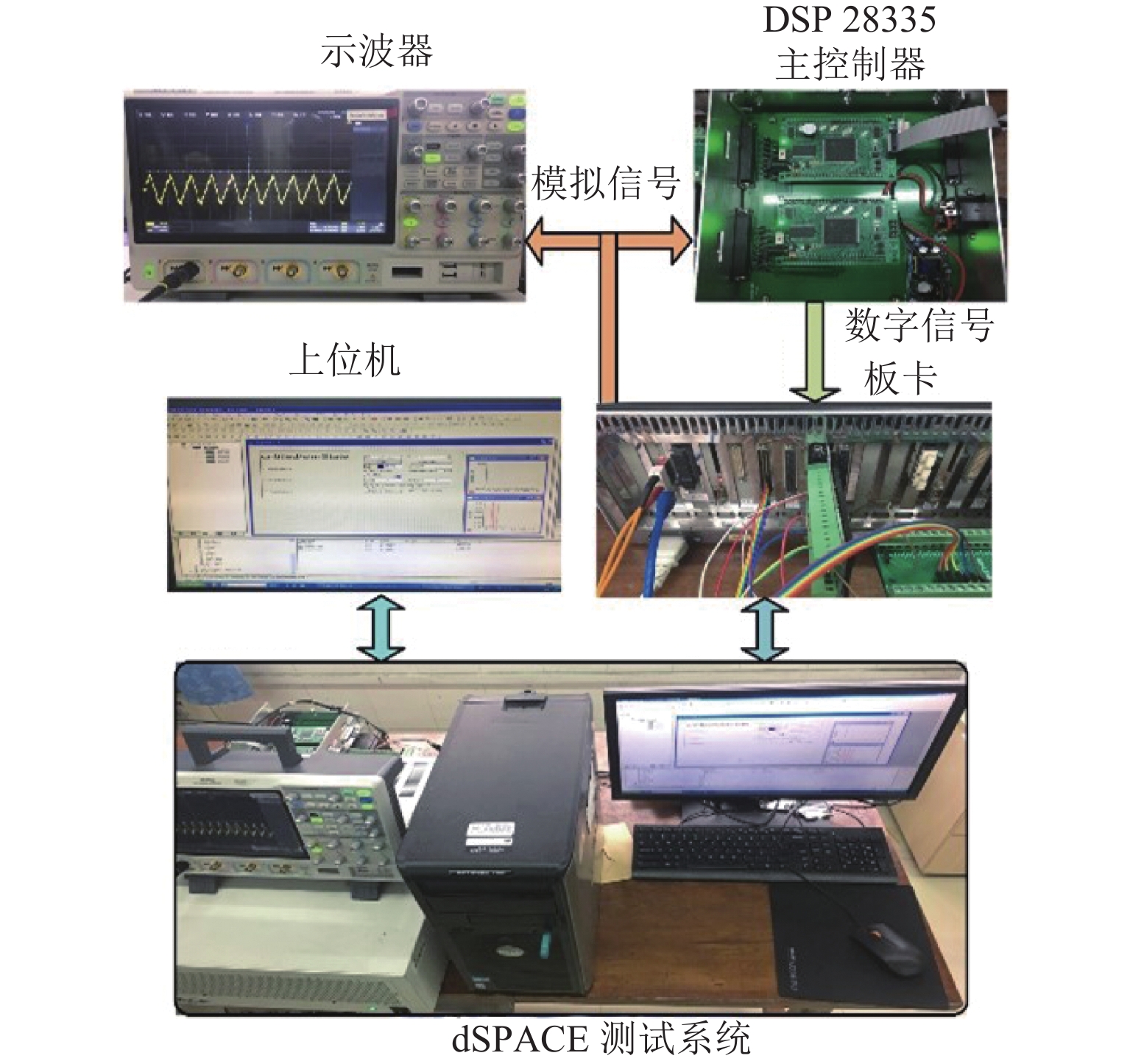
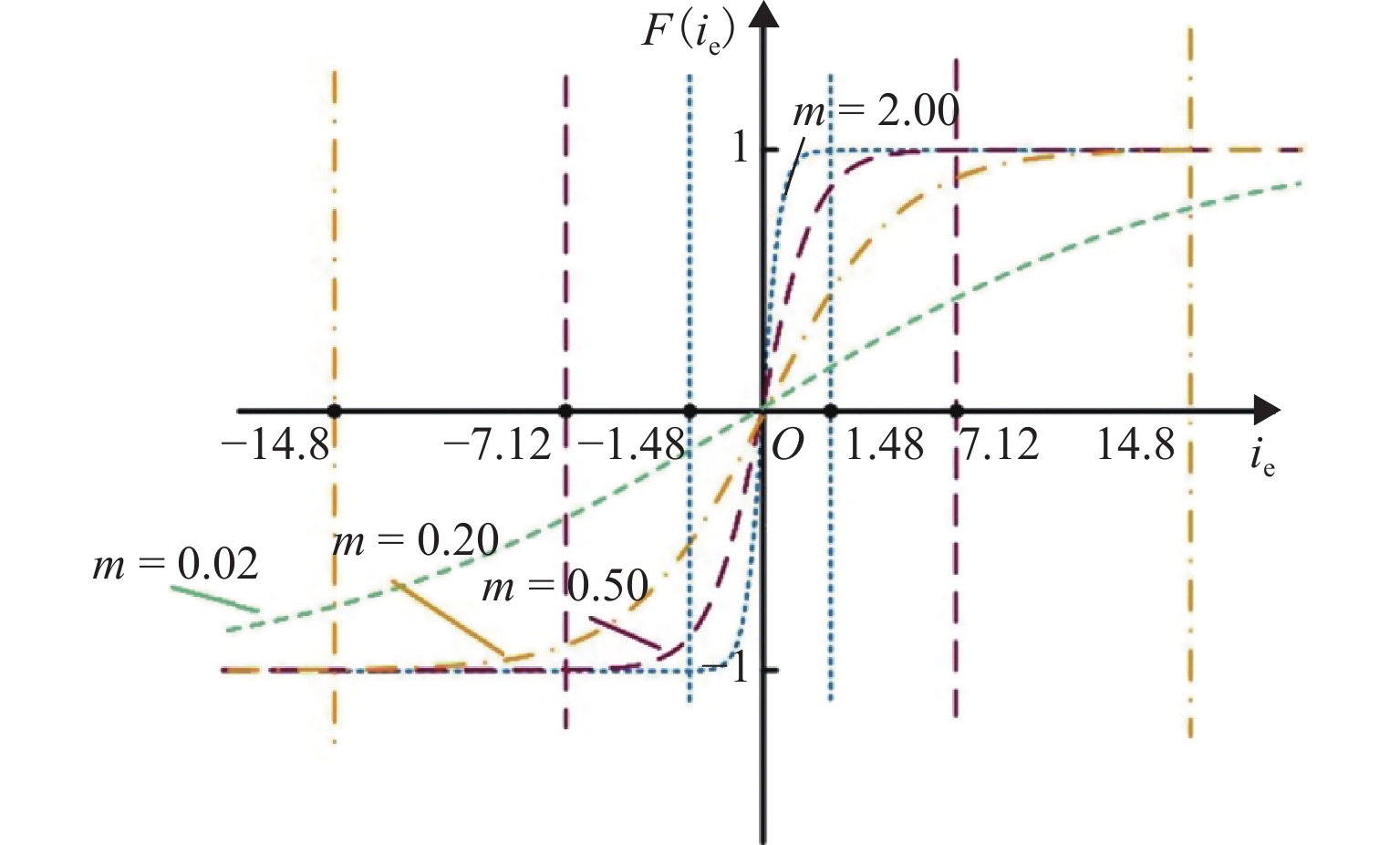
In the wide speed range of sensorless control, the traditional super-twisting second-order sliding mode observer algorithm had a problem that the error of rotor position estimation would change with the speed in the permanent magnet synchronous motor (PMSM). In order to improve the control performance of the motor speed and reduce the error of rotor position estimation, an improved sliding mode observer based on hyperbolic function was proposed, and an online identification scheme of stator resistance was designed. A disturbance voltage observer was designed to estimate the distortion voltage caused by the nonlinearity of the inverter on line. Finally, the hardware-in-the-loop test was carried out to verify the feasibility of the scheme. The test results show that the error of position estimation can be reduced by 7.6%, and the accuracy of velocity estimation can be increased by 5.8%.

| [1] |
邓自刚,刘宗鑫,李海涛,等. 磁悬浮列车发展现状与展望[J]. 西南交通大学学报,2022,57(3): 455-474,530. doi: 10.3969/j.issn.0258-2724.20220001
DENG Zigang, LIU Zongxin, LI Haitao, et al. Development status and prospect of maglev train[J]. Journal of Southwest Jiaotong University, 2022, 57(3): 455-474,530. doi: 10.3969/j.issn.0258-2724.20220001
|
| [2] |
孙友刚,徐俊起,贺祯宇,等. 基于误差交叉耦合的多电磁铁悬浮系统滑模协同控制[J]. 西南交通大学学报,2022,57(3): 558-565. doi: 10.3969/j.issn.0258-2724.20210924
SUN Yougang, XU Junqi, HE Zhenyu, et al. Sliding mode cooperative control of multi-electromagnet suspension system based on error cross coupling[J]. Journal of Southwest Jiaotong University, 2022, 57(3): 558-565. doi: 10.3969/j.issn.0258-2724.20210924
|
| [3] |
尚喆,赵荣祥,窦汝振. 基于自适应滑模观测器的永磁同步电机无位置传感器控制研究[J]. 中国电机工程学报,2007,3: 23-27. doi: 10.3321/j.issn:0258-8013.2007.26.005
SHANG Zhe, ZHAO Rongxiang, DOU Ruzhen. Research on sensorless control of PMSM based on adaptive sliding mode observer[J]. Proceedings of the CSEE, 2007, 3: 23-27. doi: 10.3321/j.issn:0258-8013.2007.26.005
|
| [4] |
王高林,张国强,贵献国,等. 永磁同步电机无位置传感器混合控制策略[J]. 中国电机工程报,2012,32(24): 103-109.
WANG Gaolin, ZHANG Guoqiang, GUI Xianguo, et al. Hybrid sensorless control strategy for permanent magnet synchronous motors[J]. Proceedings of the CSEE, 2012, 32(24): 103-109.
|
| [5] |
XIE G, LU K Y, DWIVEDI S K, et al. Minimum-voltage vector injection method for sensorless control of PMSM for low-speed operations[J]. IEEE Transactions on Power Electronics, 2016, 31(2): 1785-1794. doi: 10.1109/TPEL.2015.2426200
|
| [6] |
张磊,高春侠. 一种变增益宽速度范围的永磁同步电机无位置传感器控制[J]. 电机与控制学报,2015,19(8): 36-40,46.
ZHANG Lei, GAO Chunxia. Research on variable gain wide speed region sensor-less controltheme for permanent magnet synchronous motors[J]. Electrical Machines and Control, 2015, 19(8): 36-40,46.
|
| [7] |
BOUKATTAYA M, GASSARA H. Time-varying nonsingular terminal sliding mode control foruncertain second-order nonlinear systems with prespecified time[J]. International Journal of Adaptive Control and Signal Processing, 2022, 36(8): 2017-2040. doi: 10.1002/acs.3445
|
| [8] |
CHI S, XU L Y, ZHANG Z. Sliding mode sensorless control of PM synchronous motor for direct-driven washing machines[C]//Conference Record of the 2006 IEEE Industry Applications Conference Forty-First IAS Annual Meeting. Tampa: IEEE, 2006: 873-879.
|
| [9] |
WANG H M, GE X L, LIU Y C. Second-order sliding-mode MRAS observer-based sensorless vector control of linear induction motor drives for medium-low speed maglev applications[J]. IEEE Transactions on Industrial Electronics, 2018, 65(12): 9938-9952. doi: 10.1109/TIE.2018.2818664
|
| [10] |
LIANG D L, LI J, QU R H. Sensorless control of permanent magnet synchronous machine based on second-order sliding-mode observer with online resistance estimation[J]. IEEE Transactions on Industry Applications, 2017, 53(4): 3672-3682. doi: 10.1109/TIA.2017.2690218
|
| [11] |
YI S C, ZHAI J Y. Adaptive second-order fast nonsingular terminal sliding mode control for robotic manipulators[J]. ISA Transactions, 2019, 90: 41-51. doi: 10.1016/j.isatra.2018.12.046
|
| [12] |
张勇军,汪伟,张小庆,等. 带电阻在线辨识的改进型永磁同步电机滑模观测方法[J]. 电机与控制学报,2017,21(6): 10-17.
ZHANG Yongjun, WANG Wei, ZHANG Xiaoqing, et al. Study on improved sliding-mode control with resistance estimation of PMSM[J]. Electrical Machines and Control, 2017, 21(6): 10-17.
|
| [13] |
LI Z Y, ZHAI J Y, KARIMI H R. Adaptive finite-time super-twisting sliding mode control for robotic manipulators with control backlash[J]. International Journal of Robust and Nonlinear Control, 2021, 31(17): 8537-8550. doi: 10.1002/rnc.5744
|
| [14] |
KIM H, SON J, LEE J. A high-speed sliding-mode observer for the sensorless speed control of a PMSM[J]. IEEE Transactions on Industrial Electronics, 2011, 58(9): 4069-4077. doi: 10.1109/TIE.2010.2098357
|
| [15] |
HWANG S H, KIM J M. Dead time compensation method for voltage-fed PWM inverter[J]. IEEE Transactions on Energy Conversion, 2010, 25(1): 1-10. doi: 10.1109/TEC.2009.2031811
|
Figures(11) / Tables(1)


 DownLoad:
DownLoad: