Abstract:
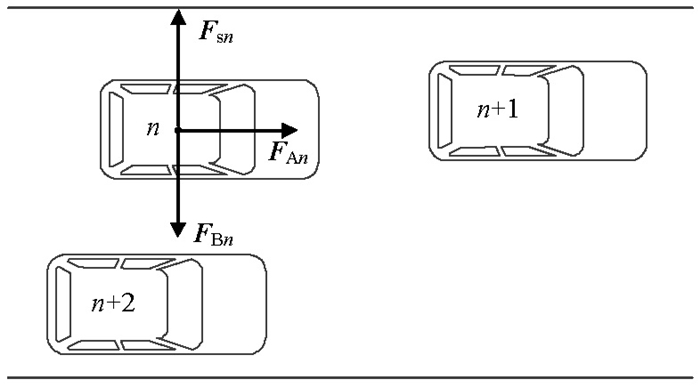
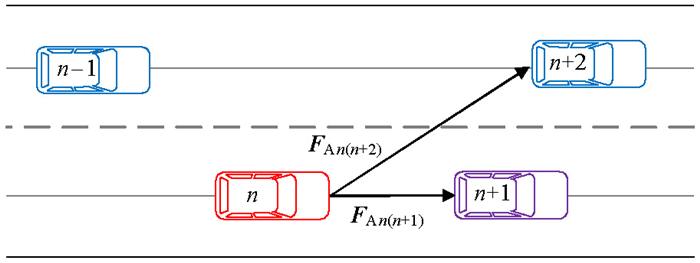
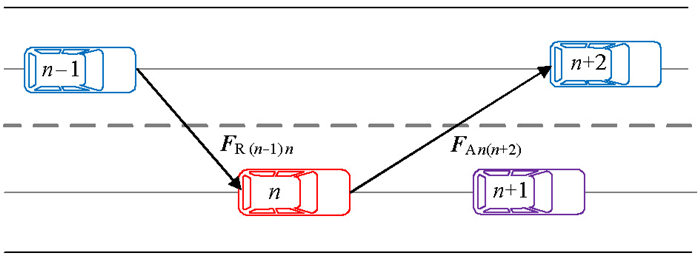
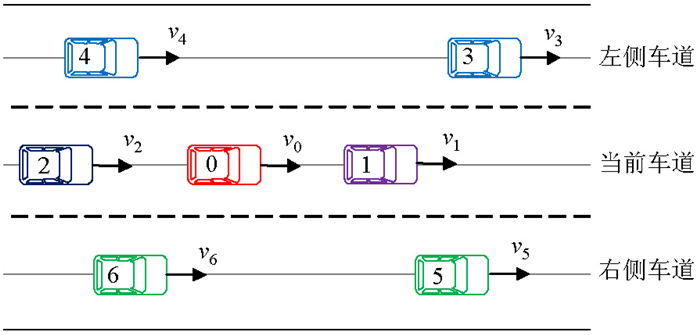
In order to establish a simpler lane-changing decision-making model and consider the interaction between the lane-changing vehicle and the vehicles of the target lane, on the basis of the traditional methods of lane-changing utility and selection of safety gap, an initiative lane-changing decision-making model for drivers based on the social model by combining the social force following model with the lane-changing model was proposed. First, taking the following force in the social force model as the utility function of each driveway, a lane-changing decision-making utility model for the target lane selection was established. Second, considering the vehicle's longitudinal safety in the lane-changing process, the following force was used to build utility model of interaction between the lane-changing vehicle and the vehicles of the target lane to constrain the selection of safety gap. Finally, the proposed model was calibrated and validated by using next generation simulation (NGSIM) data and genetic algorithm function in MATLAB genetic algorithms toolbox for drivers' lane-changing decision-making behaviours (keeping following, changing to right lane, changing to left lane). The study results show that the lane-changing decision-making model based on social force could identify accurately the drivers'initiative lane-changing decision-making behaviour. The recognition rates of the optimal parameters in calibration data for drivers' lane-changing decision-making behaviours (keeping following, changing to right lane, changing to left lane) reached 93.44%, 93.14%, and 90.77%, respectively, and the recognition rates of the lane-changing decision-making behaviours in calibration data reached 86.16%, 80.00%, and 80.27%. Each recognition rate in calibration data and validation data was above 80.00%, and the overall recognition rates reached 92.66% and 83.28%, respectively.


 Advance Search
Advance Search
 Email alert
Email alert RSS
RSS [Abstract]
[Abstract] [FullText HTML]
[FullText HTML] PDF 3857KB
PDF 3857KB Supplements
Supplements [Cited By]
[Cited By]