- ISSN 0258-2724
- CN 51-1277/U
- EI Compendex
- Scopus
- Indexed by Core Journals of China, Chinese S&T Journal Citation Reports
- Chinese S&T Journal Citation Reports
- Chinese Science Citation Database

| Citation: | ZHANG Baoan, YU Dalian, LI Haitao, LIANG Xin, HUANG Chao. Influence of Flexibility Characteristics of Levitation Chassis on Curve Negotiation Performance of High-Speed Maglev Vehicle[J]. Journal of Southwest Jiaotong University, 2022, 57(3): 475-482. doi: 10.3969/j.issn.0258-2724.20210635

|
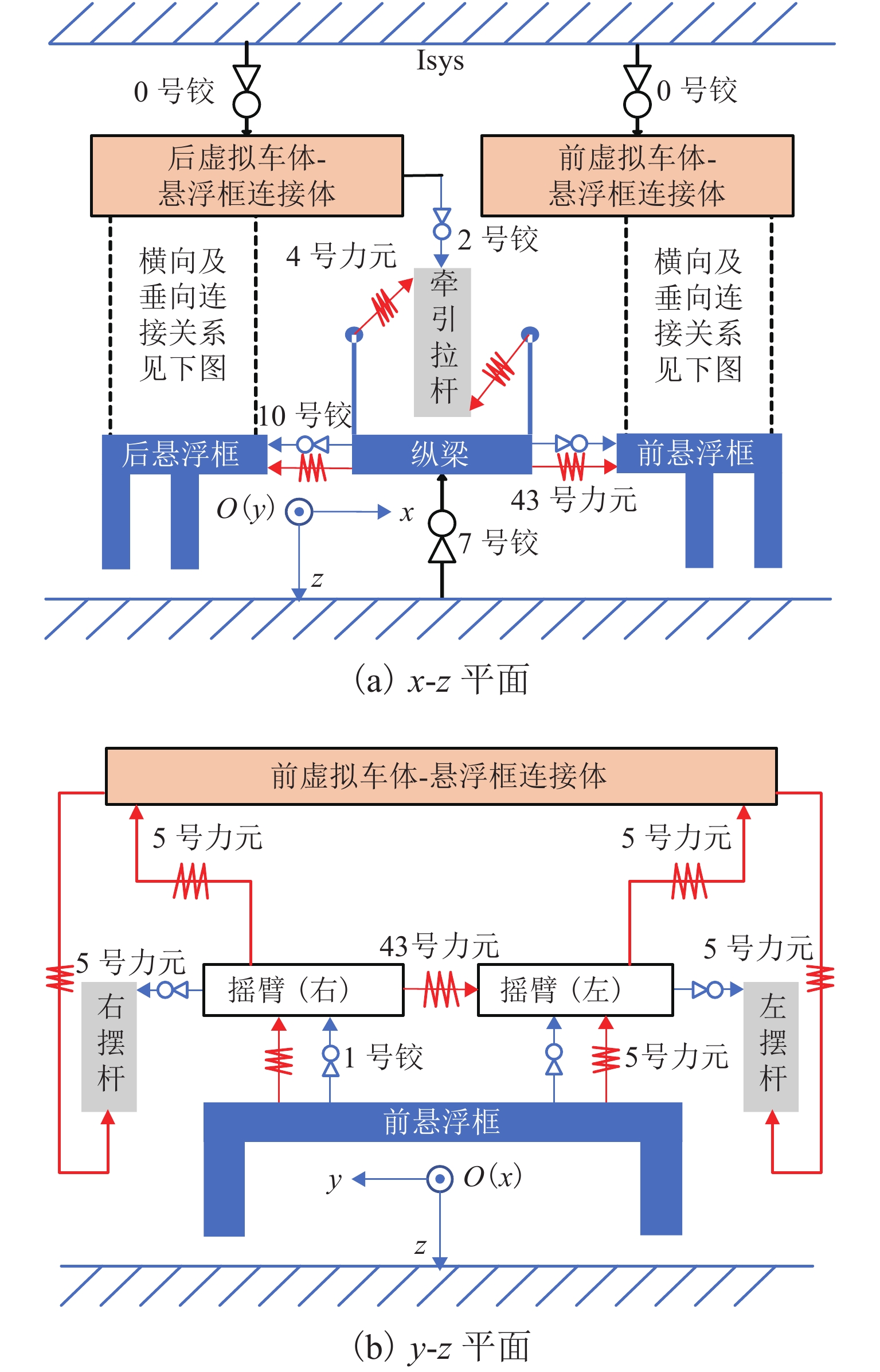
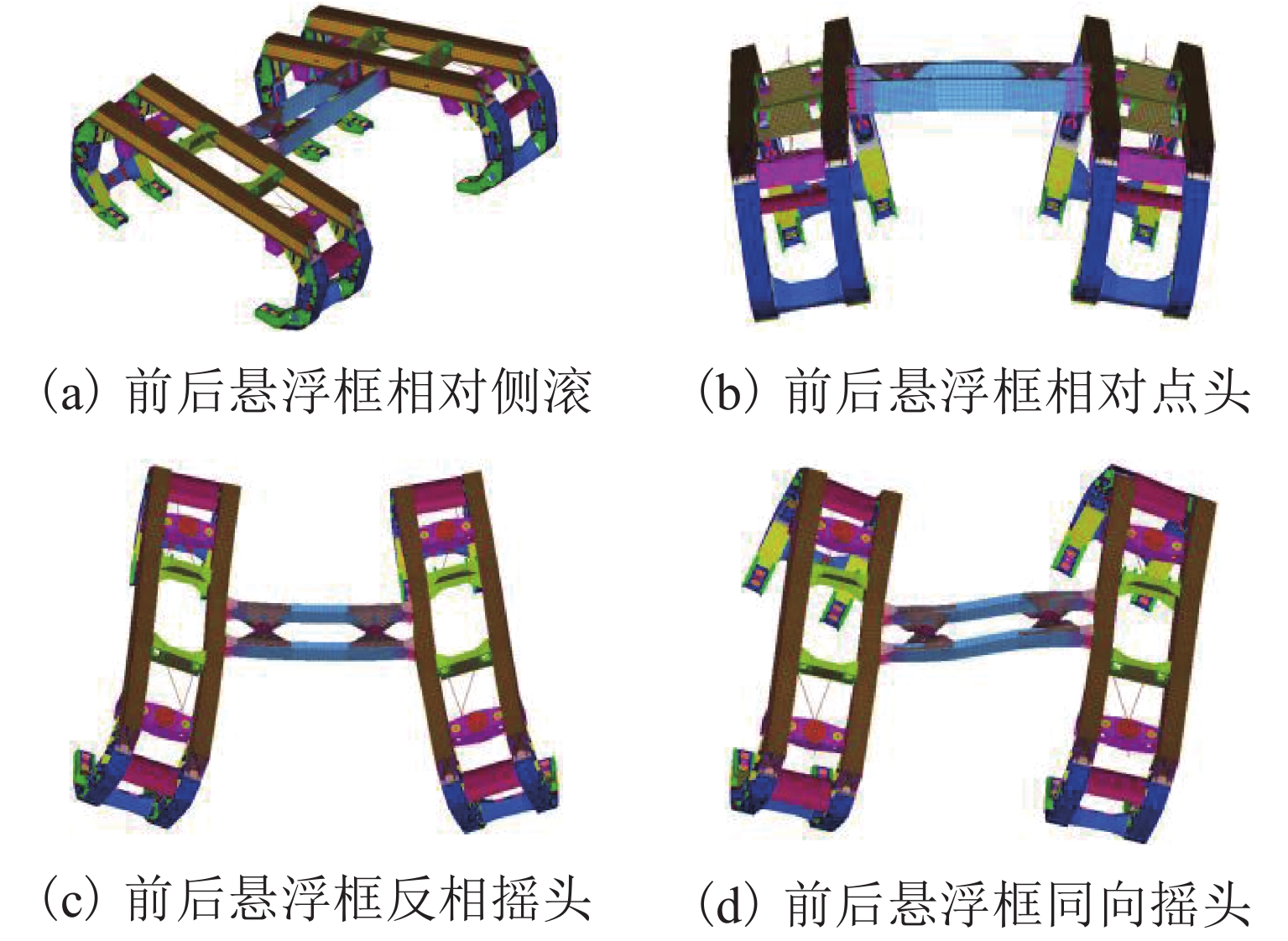
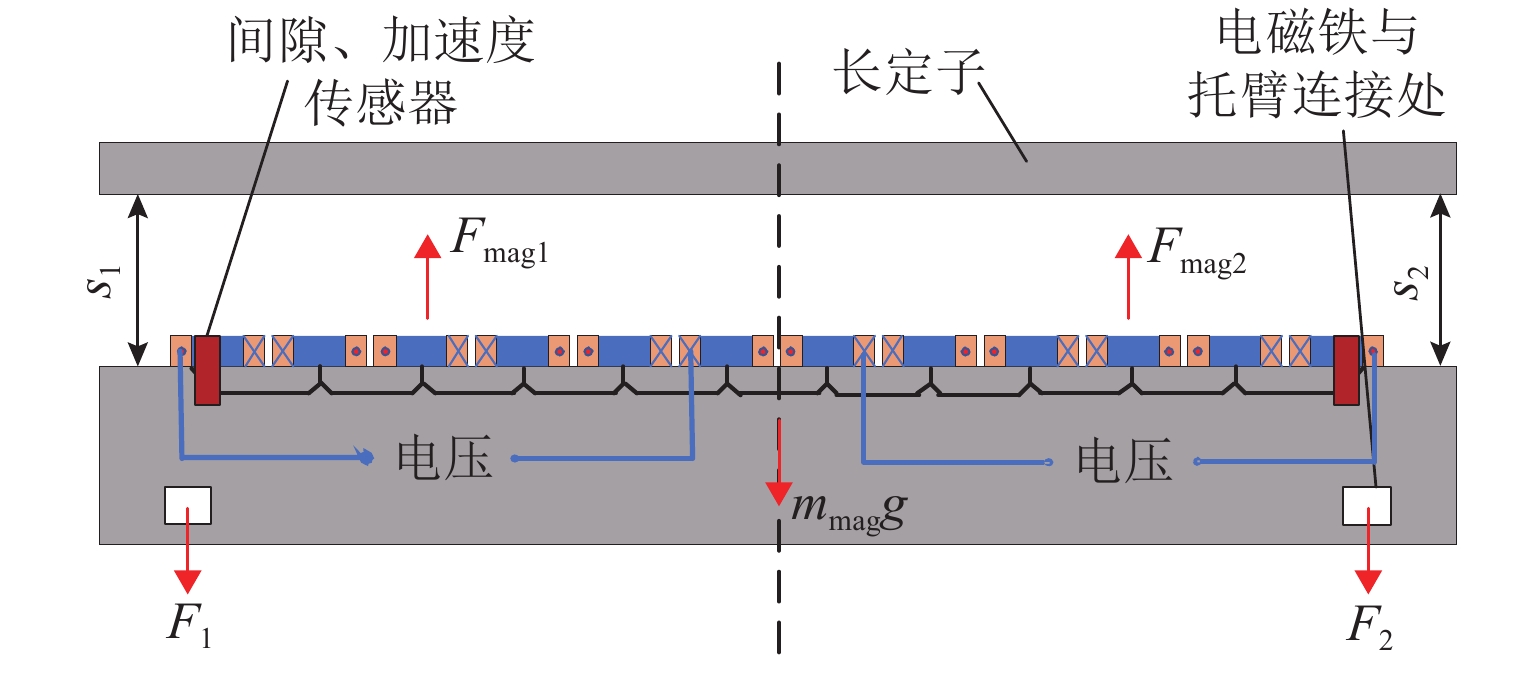
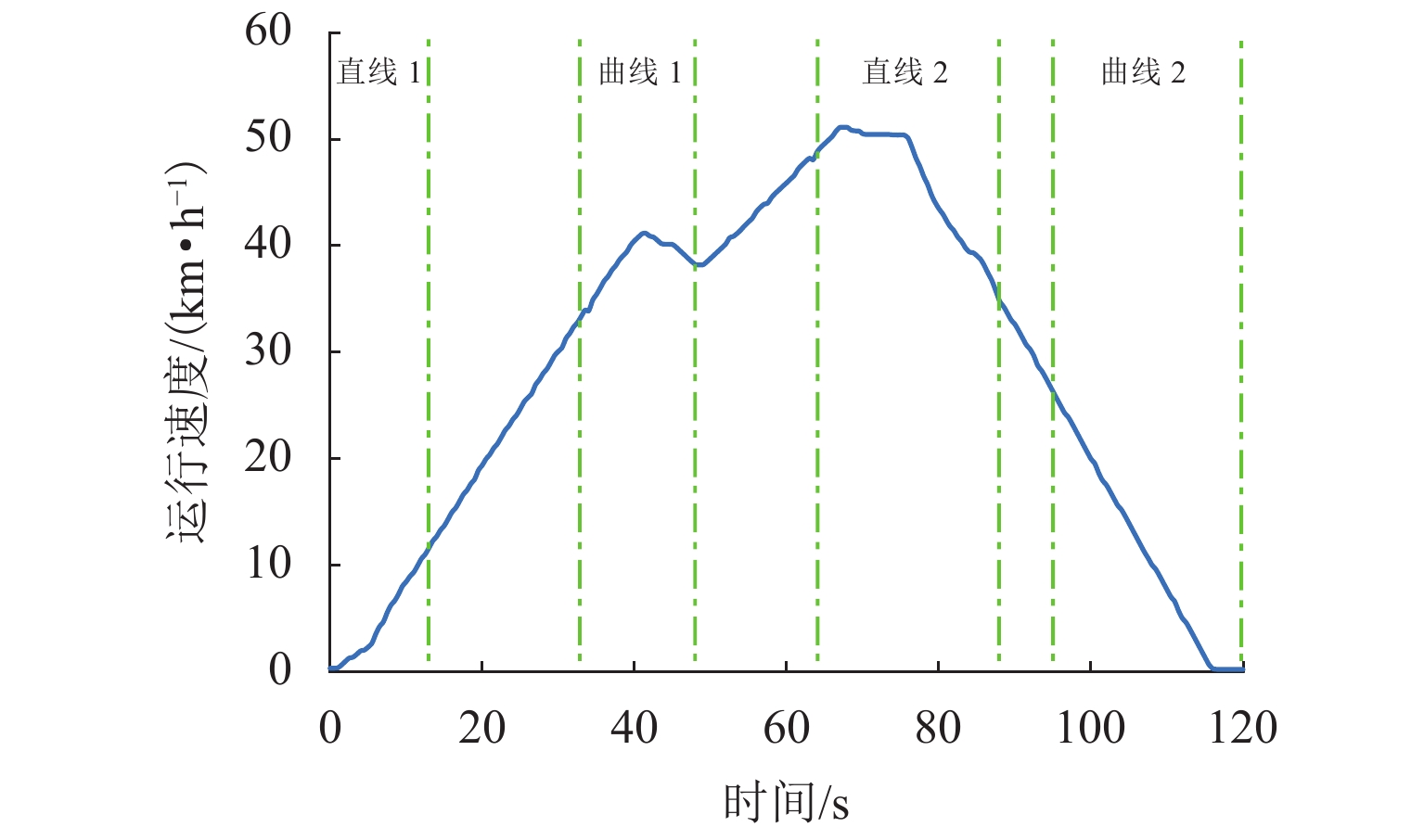
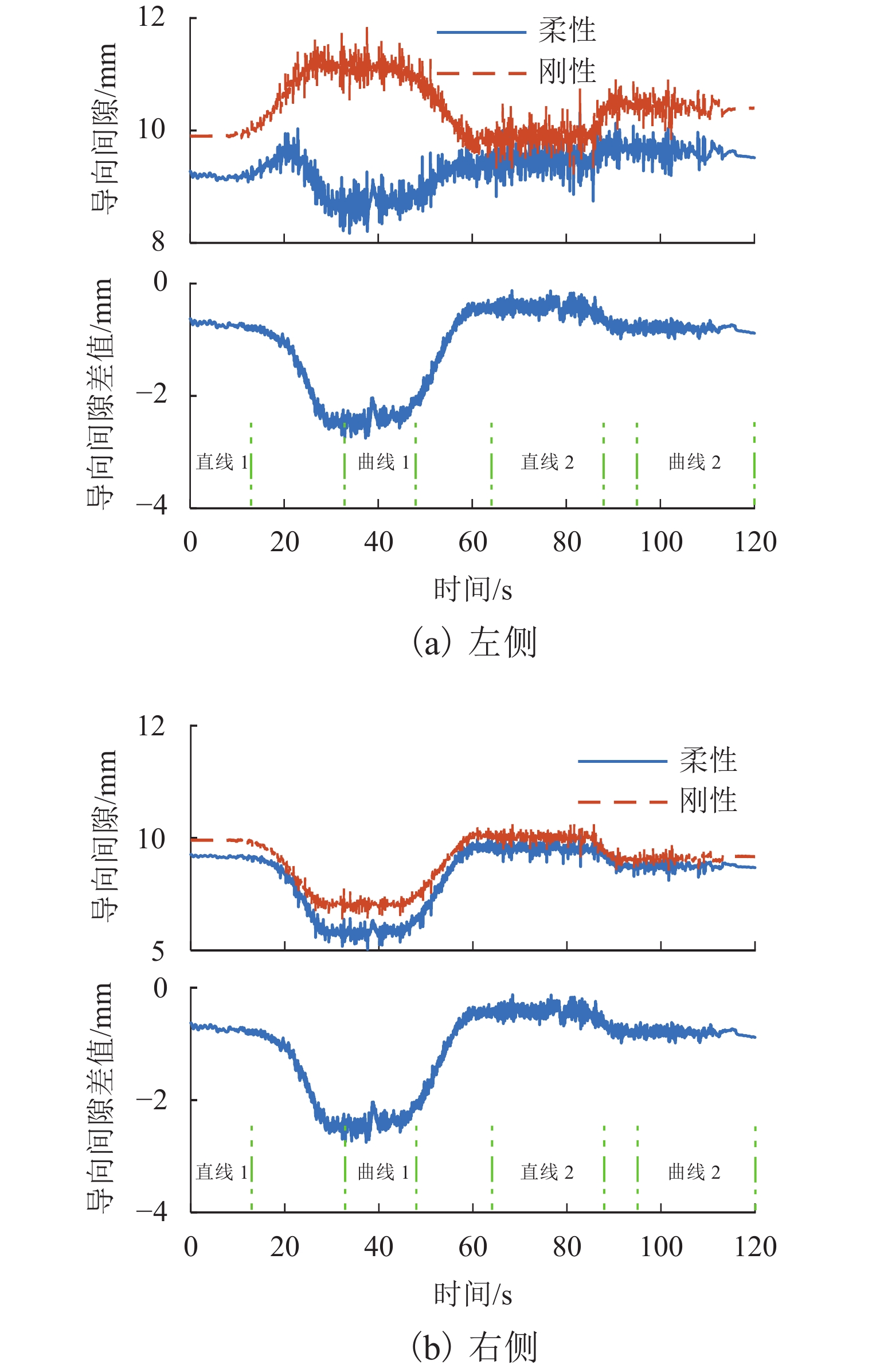
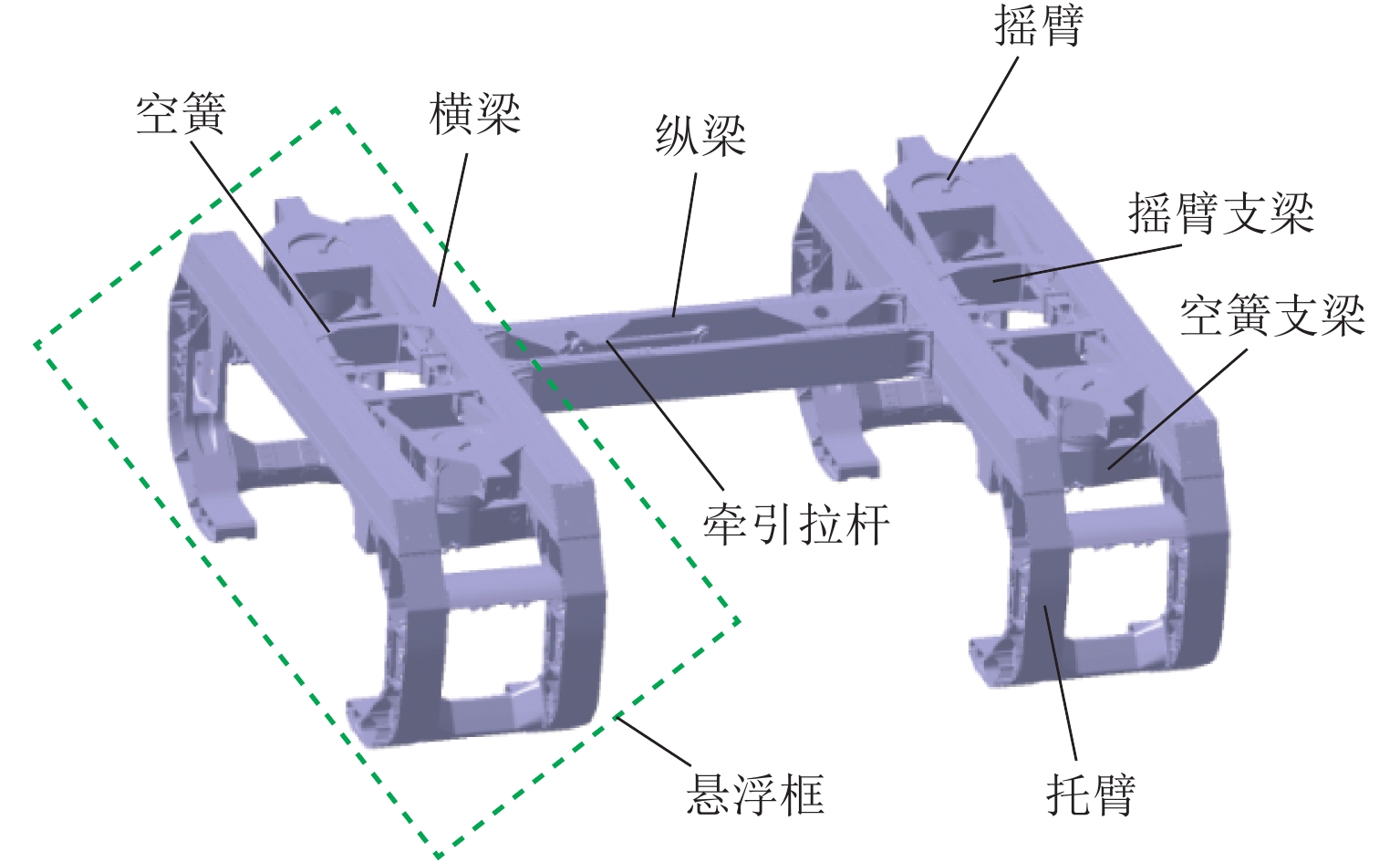
In order to investigate the small curve negotiation performance of high-speed maglev trains, the flexible vibration of the levitation chassis is explored, and the finite element model of levitation chassis is established to calculate its elastic modes; then the dynamics model of the high-speed maglev vehicle is built. According to the track conditions, speed curve and fitted track irregularities from Tongji University’s maglev test line, the influence of flexible vibration of levitation chassis is analyzed on the gap and electromagnetic force of guidance and levitation electromagnet. Meanwhile, a dynamics model of a rigid levitation chassis is built for comparison purpose. The results show that the dynamic performance of electromagnet is greatly affected by flexible vibration of the levitation chassis when the negotiating curve has a smaller radius of 400 m. The difference of the guidance force between the two models is about 12.5 kN, while the difference of the levitation force is 6.0 kN or so. The comparison with the simulation demonstrates that the results from the model of the levitation chassis flexibility is more close to the test results. The main frequencies of the vertical and lateral levitation chassis vibration are 10.4 Hz and 13.2 Hz respectively, which are similar to modal frequencies of relative pitching and anti-phase yawing between the front and rear levitation frame. The flexibility of levitation chassis should be taken into account in the key issues of high-speed maglev trains, such as control parameter optimization, suspension parameter optimization, and running stability.

| [1] |
CUI Y X, SHEN G, WANG H. Maglev vehicle-guideway coupling vibration test rig based on the similarity theory[J]. Journal of Vibration and Control, 2016, 22(1): 286-295. doi: 10.1177/1077546314521446
|
| [2] |
武建军,沈飞,史筱红. 磁悬浮控制系统的稳定性及Hopf分岔的研究[J]. 振动与冲击,2010,29(3): 193-196, 214. doi: 10.3969/j.issn.1000-3835.2010.03.047
WU Jianjun, SHEN Fei, SHI Xiaohong. Stability and Hopf bifurcation of the maglev system[J]. Journal of Vibration and Shock, 2010, 29(3): 193-196, 214. doi: 10.3969/j.issn.1000-3835.2010.03.047
|
| [3] |
梁鑫. 磁浮列车车轨耦合振动分析及试验研究[D]. 成都: 西南交通大学, 2015.
|
| [4] |
WANG K R, LUO S H, MA W H, et al. Dynamic characteristics analysis for a new-type maglev vehicle[J]. Advances in Mechanical Engineering, 2017, 9(12): 168781401774541.1-168781401774541.10.
|
| [5] |
汪科任,罗世辉,张继业. 磁悬浮控制器设计及静悬浮稳定性分析[J]. 西南交通大学学报,2017,52(1): 118-126. doi: 10.3969/j.issn.0258-2724.2017.01.017
WANG Keren, LUO Shihui, ZHANG Jiye. Design of magnetic levitation controller and static stability analysis[J]. Journal of Southwest Jiaotong University, 2017, 52(1): 118-126. doi: 10.3969/j.issn.0258-2724.2017.01.017
|
| [6] |
汪科任,罗世辉,宗凌潇,等. 新型磁浮车动力学仿真分析[J]. 振动与冲击,2017,36(20): 23-29.
WANG Keren, LUO Shihui, ZONG Lingxiao, et al. A dynamic simulation analysis of new maglev trains[J]. Journal of Vibration and Shock, 2017, 36(20): 23-29.
|
| [7] |
宗凌潇. 时速140km新型中低速磁浮列车走行机构研究分析[D]. 成都: 西南交通大学, 2016 .
|
| [8] |
赵春霞. EMS型高速磁浮列车导向动力学研究[D]. 长沙: 国防科学技术大学, 2014.
|
| [9] |
贺光. EMS型中速磁浮列车动力学建模与导向能力研究[D]. 长沙: 国防科学技术大学, 2016.
|
| [10] |
谢钦. 新型中低速磁浮车辆空气弹簧应用研究[D]. 成都: 西南交通大学, 2017.
|
| [11] |
ZHANG M, LUO S H, GAO C, et al. Research on the mechanism of a newly developed levitation frame with mid-set air spring[J]. Vehicle System Dynamics, 2018, 56(12): 1797-1816. doi: 10.1080/00423114.2018.1435892
|
| [12] |
ZHANG M, GAO C, MA W H. Effect of different connection modes of electromagnets on the performance of levitation control[J]. Proceedings of the Institution of Mechanical Engineers, Part F: Journal of Rail and Rapid Transit, 2018, 232(8): 2111-2125. doi: 10.1177/0954409718762171
|
| [13] |
闫一凡,齐洪峰,罗林涛,等. 基于UM的高速磁浮车辆刚柔耦合建模及振动传递规律研究[J]. 铁道机车车辆,2019,39(5): 59-64, 126.
YAN Yifan, QI Hongfeng, LUO Lintao, et al. Rigid-flexible coupled modeling of high-speed maglev vehicle and vibration transmitting research base on UM[J]. Railway Locomotive & Car, 2019, 39(5): 59-64, 126.
|
| [14] |
赵春发,翟婉明,叶学艳. 高速磁浮车辆弹性悬浮架动力学建模与仿真[J]. 系统仿真学报,2008,20(20): 5718-5721.
ZHAO Chunfa, ZHAI Wanming, YE Xueyan. Dynamic modeling and simulation of high-speed maglev vehicle and its elastic levitation chassis[J]. Journal of System Simulation, 2008, 20(20): 5718-5721.
|
| [15] |
叶学艳. 磁浮车辆系统动力学建模与仿真分析[D]. 成都: 西南交通大学, 2007.
|
| [16] |
DELLNITZ M, DIGNATH F, FLAßKAMP K, et al. Modelling and analysis of the nonlinear dynamics of the transrapid and its guideway[C]//Progress in Industrial Mathematics at ECMI 2010. Berlin: Springer, 2012: 113-123.
|
| [17] |
DING S S, SUN J J, HAN W T, et al. Modeling and analysis of a novel guidance magnet for high-speed maglev train[J]. IEEE Access, 2019, 7: 133324-133334. doi: 10.1109/ACCESS.2019.2940728
|
| [18] |
陈志贤. 高速常导电磁悬浮车辆系统动力学优化研究[D]. 成都: 西南交通大学, 2020.
|
| [19] |
王军, 马云双. 中国高速动车组发展模式探索与实践[M]. 北京: 中国铁道出版社有限公司, 2020: 314-315.
|
| [20] |
梁鑫,丁叁叁,黄超,等. 基于正态分布叠加原理的高速磁浮线路不平顺预测方法[J]. 机车电传动,2020(6): 20-24.
LIANG Xin, DING Sansan, HUANG Chao, et al. Prediction method of irregularity of high-speed maglev track based on normal distribution superposition principle[J]. Electric Drive for Locomotives, 2020(6): 20-24.
|
Figures(14) / Tables(2)



 DownLoad:
DownLoad: