- ISSN 0258-2724
- CN 51-1277/U
- EI Compendex
- Scopus
- Indexed by Core Journals of China, Chinese S&T Journal Citation Reports
- Chinese S&T Journal Citation Reports
- Chinese Science Citation Database

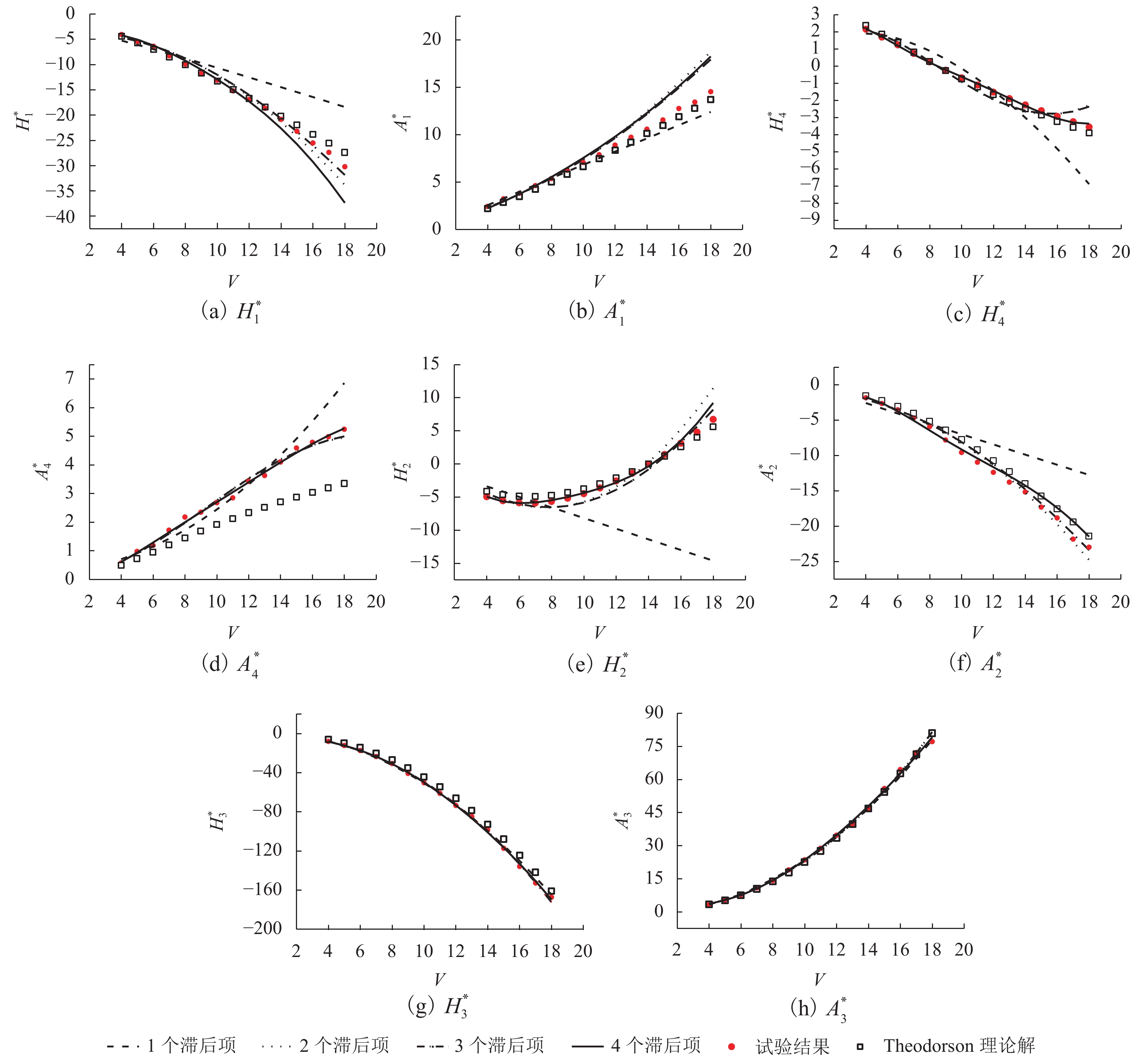
| Citation: | WU Bo, WANG Qi, LIAO Haili, LI Yulin. Direct Identification of Coefficients of Rational Function Approximation for Self-Excited Aerodynamic Forces[J]. Journal of Southwest Jiaotong University, 2020, 55(2): 247-255. doi: 10.3969/j.issn.0258-2724.20180593

|

|
SCANLAN R H, TOMKO J J. Airfoil and bridge deck flutter derivatives[J]. Journal of Engineering Mechanics, 1971, 97(6): 1717-1737.
|
|
LI Q C, LIN Y K. New stochastic theory for bridge stability in turbulent flow[J]. Journal of Engineering Mechanics, 1995, 121(1): 102-116. doi: 10.1061/(ASCE)0733-9399(1995)121:1(102)
|
|
KARPEL M. Design for active flutter suppression and gust alleviation using state-space aero-elastic modeling[J]. Journal of Aircraft, 1982, 19(3): 221-227. doi: 10.2514/3.57379
|
|
KARPEL M. Minimum-state unsteady aerodynamic approximations with flexible constraints[J]. Journal of Aircraft, 1996, 33(6): 1190-1196.
|
|
SCANLAN R H. Motion-related body force function in two-dimensional low speed flow[J]. Journal of Fluids and Structures, 2000, 14(1): 49-63. doi: 10.1006/jfls.1999.0252
|
|
COSTA C, BORRI C. Application of indicial function in bridge deck aeroelasticity[J]. Journal of Wind Engineering and Industrial Aerodynamics, 2006, 94(11): 859-881. doi: 10.1016/j.jweia.2006.06.007
|
|
XIE J. CVR method for identification of non-steady aerodynamic model[J]. Journal of Wind Engineering and Industrial Aerodynamics, 1988, 29: 389-397. doi: 10.1016/0167-6105(88)90177-8
|
|
谢霁明. 识别非定常气动力模型的初脉冲耦合振动法[J]. 空气动力学学报,1986,4(3): 258-268.
XIE Jiming. CVR Method for identification of nonsteady aerodynamic model[J]. ACTA Aerodynamic Sinica, 1986, 4(3): 258-268.
|
|
谢霁明,项海帆. 桥梁三维颤振分析的状态空间法[J]. 同济大学学报,1985(3): 1-13.
XIE Jiming, XIANG Haifan. A state-space method for 3-D flutter analysis of bridge structures[J]. Journal of Tongji University, 1985(3): 1-13.
|
|
CHEN X, MATSUMOTO M, AHSAN K. Time domain flutter and buffeting response analysis of bridges[J]. Journal of Engineering Mechanics, 2000, 126(1): 7-16. doi: 10.1061/(ASCE)0733-9399(2000)126:1(7)
|
|
CHEN X, MATSUMOTO M, KAREEM A. Aerodynamic coupling effects on flutter and buffeting of bridges[J]. Journal of Engineering Mechanics, 2000, 126(1): 17-26. doi: 10.1061/(ASCE)0733-9399(2000)126:1(17)
|
|
郭增伟,葛耀君. 桥梁自激力的状态空间模型的时频特性[J]. 振动工程学报,2013,26(2): 199-206. doi: 10.3969/j.issn.1004-4523.2013.02.007
GUO Zengwei, GE Yaojun. Time and frequency response characteristics of self-exited force of bridge in state space domain[J]. Journal of Vibration Engineering, 2013, 26(2): 199-206. doi: 10.3969/j.issn.1004-4523.2013.02.007
|
|
张志田,胡海波,陈政清. 桥梁自激气动力阶跃函数及时域颤振的数值算法[J]. 土木工程学报,2011,44(2): 99-107.
ZHANG Zhitian, HU Haibo, CHEN Zhengqing. Bridge indicial functions for self-excited aerodynamic forces and numerical algorithm for time domain flutter[J]. China Civil Engineering Journal, 2011, 44(2): 99-107.
|
|
张志田,陈政清,李春光. 桥梁自激气动力时域表达式的瞬态与极限特性[J]. 工程力学,2011,28(2): 75-85.
ZHANG Zhitian, CHEN Zhengqing, LI Chunguang. Limiting and transient characteristics of time domain expressions for bridge self-excited aerodynamic forces[J]. Engineering Mechanics, 2011, 28(2): 75-85.
|
|
WILDE K, FUJINO Y. Aerodynamic control of bridge deck flutter by active surfaces[J]. Journal of Engineering Mechanics, 1998, 124(7): 718-727. doi: 10.1061/(ASCE)0733-9399(1998)124:7(718)
|
|
熊龙,廖海黎,马存明,等. 静风效应对千米级悬索桥颤振的影响[J]. 华中科技大学学报(自然科学版),2016,44(12): 44-49.
XIONG Long, LIAO Haili, MA Cunming, et al. Study on aerostatic effects on flutter of kilometer level suspension bridge[J]. J. Huazhong Univ. of Sci. & Tech. (Natural Science Edition), 2016, 44(12): 44-49.
|
|
王骑,廖海黎,李明水,等. 桥梁断面非线性自激气动力经验模型[J]. 西南交通大学学报,2013,48(2): 271-277. doi: 10.3969/j.issn.0258-2724.2013.02.013
WANG Qi, LIAO Haili, LI Mingshui, et al. Empirical mathematical model for nonlinear motion-induced aerodynamic force of bidge girder[J]. Journal of Southwest Jiaotong University, 2013, 48(2): 271-277. doi: 10.3969/j.issn.0258-2724.2013.02.013
|
|
CHOWDHURY A G, SARKAR P P. Experimental identification of rational function coefficients for time-domain flutter analysis[J]. Engineering Structures, 2005, 27(9): 1349-1364. doi: 10.1016/j.engstruct.2005.02.019
|
|
CAO B, SARKAR P P. Identification of rational functions using two-degree-of-freedom model by forced vibration method[J]. Engineering Structures, 2012, 43: 21-30. doi: 10.1016/j.engstruct.2012.05.003
|
|
SIEDZIAKO B, OISETH O. An enhanced identification procedure to determine the rational functions and aerodynamic derivatives of bridge decks[J]. Journal of Wind Engineering and Industrial Aerodynamic, 2018, 176: 131-142. doi: 10.1016/j.jweia.2018.03.025
|
|
李明水. 连续大气湍流中大跨度桥梁的抖振响应[D]. 成都: 西南交通大学, 1993.
|

Figures(3) / Tables(3)


 DownLoad:
DownLoad: