ZHANG Liyan, JIA Ying, HAN Dushuo, LEI Wanliang. Energy Management and Capacity Allocation Scheme for Co-phase Traction Power Supply and Energy Storage System in Electrified Railways[J]. Journal of Southwest Jiaotong University, 2023, 58(1): 22-29. doi: 10.3969/j.issn.0258-2724.20210247
Citation:
LIU Yumei, CAO Xiaoning, ZHAO Congcong, XIONG Mingye, ZHANG Jingshi. Geometry Simulation of Track Torsion-Irregularity Based on 6-DOF Platform[J]. Journal of Southwest Jiaotong University, 2014, 27(6): 1002-1009. doi: 10.3969/j.issn.0258-2724.2014.06.011
ZHANG Liyan, JIA Ying, HAN Dushuo, LEI Wanliang. Energy Management and Capacity Allocation Scheme for Co-phase Traction Power Supply and Energy Storage System in Electrified Railways[J]. Journal of Southwest Jiaotong University, 2023, 58(1): 22-29. doi: 10.3969/j.issn.0258-2724.20210247
Citation:
LIU Yumei, CAO Xiaoning, ZHAO Congcong, XIONG Mingye, ZHANG Jingshi. Geometry Simulation of Track Torsion-Irregularity Based on 6-DOF Platform[J]. Journal of Southwest Jiaotong University, 2014, 27(6): 1002-1009. doi: 10.3969/j.issn.0258-2724.2014.06.011
In order to obtain the geometry information of track torsion irregularity, an inverse kinematics model and a pose correlation model for the double 6-degree-of-freedom (DOF) platform of a track torsion irregularity simulator were established, taking into account the characteristics of torsional irregularity and the structure of the track torsional irregularity simulator. By means of Simulink inverse kinematics model, the inverse kinematics solutions for three types of torsion irregularity of domestic commonly used gauges and wheelbases of bogies were calculated. The results have a good consistency with the forward kinematics solutions, which verifies the correctness of the established inverse kinematics model and pose correlation model. In addition, taking a certain type of bogie as an example, laboratory tests were carried out using torsion irregularity of different basic lengths to study the effect of the basic length on the wheel loading reduction rate. The results show that the smaller the basic length of torsion irregularity is, the larger the wheel loading reduction rate will be. The maximum wheel loading reduction rate for 2.4 m and 5.0 m basic lengths are 0.594 and 0.581, respectively, both within the safety limit of relevant national standards.
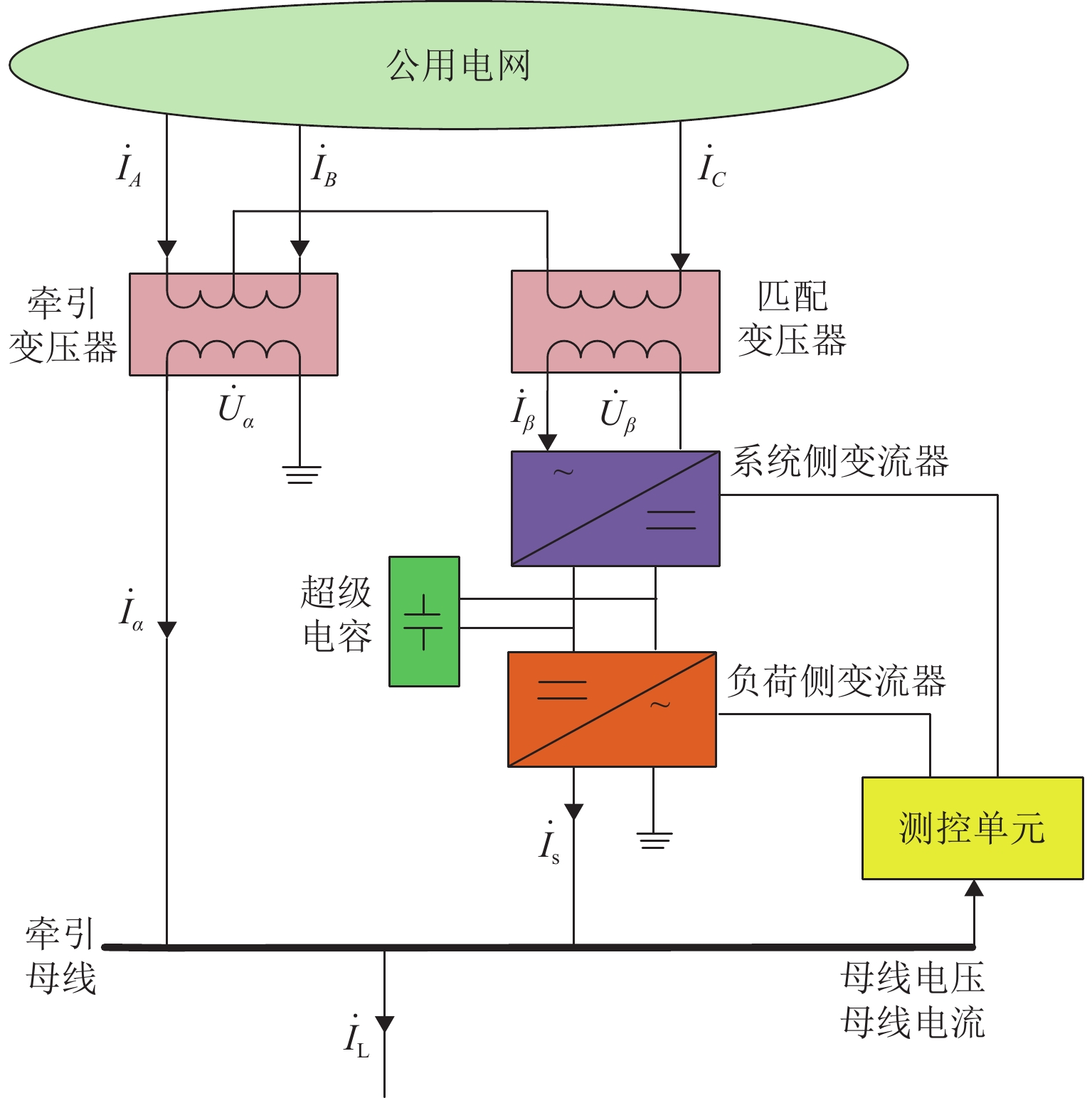
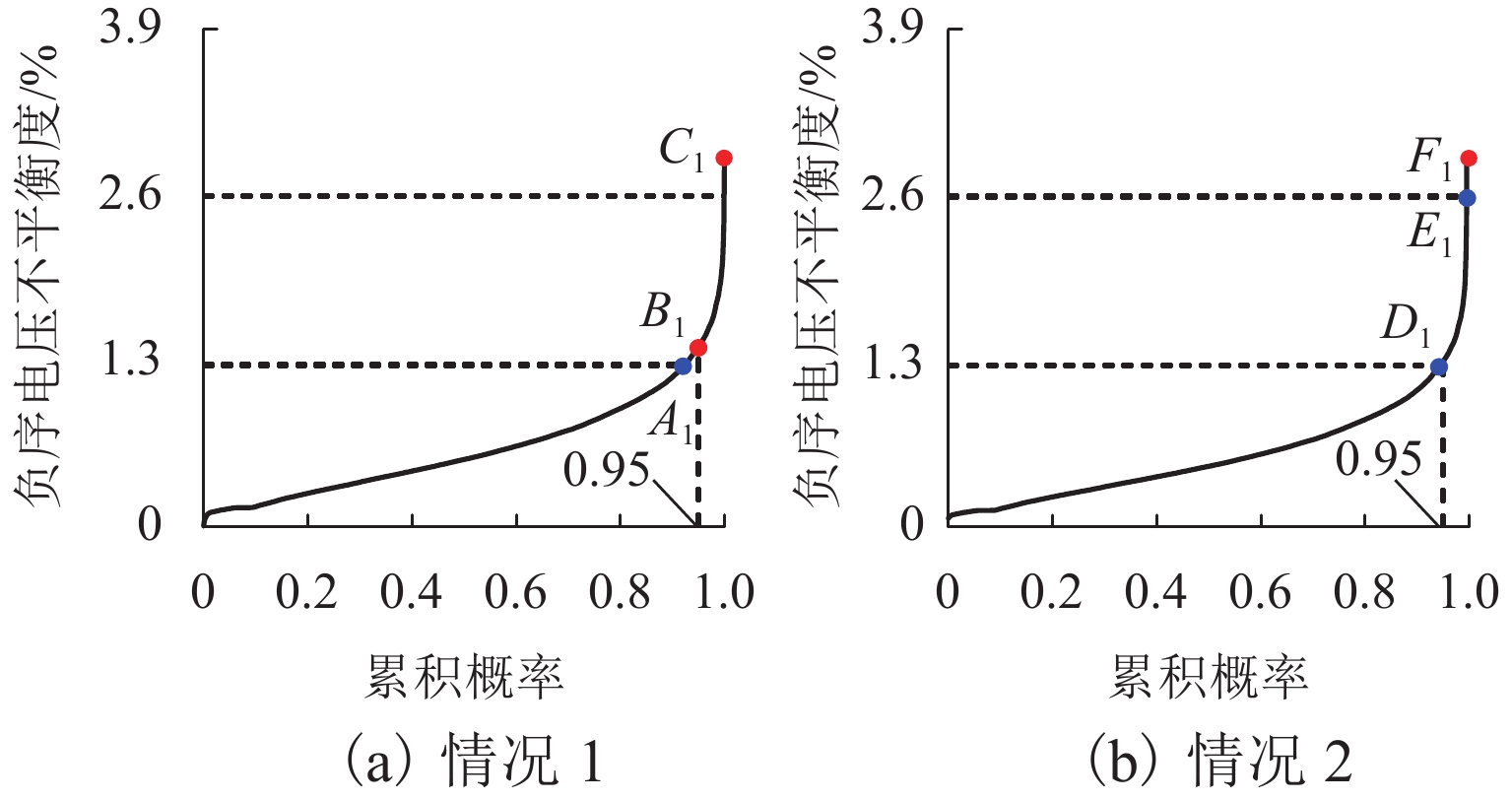
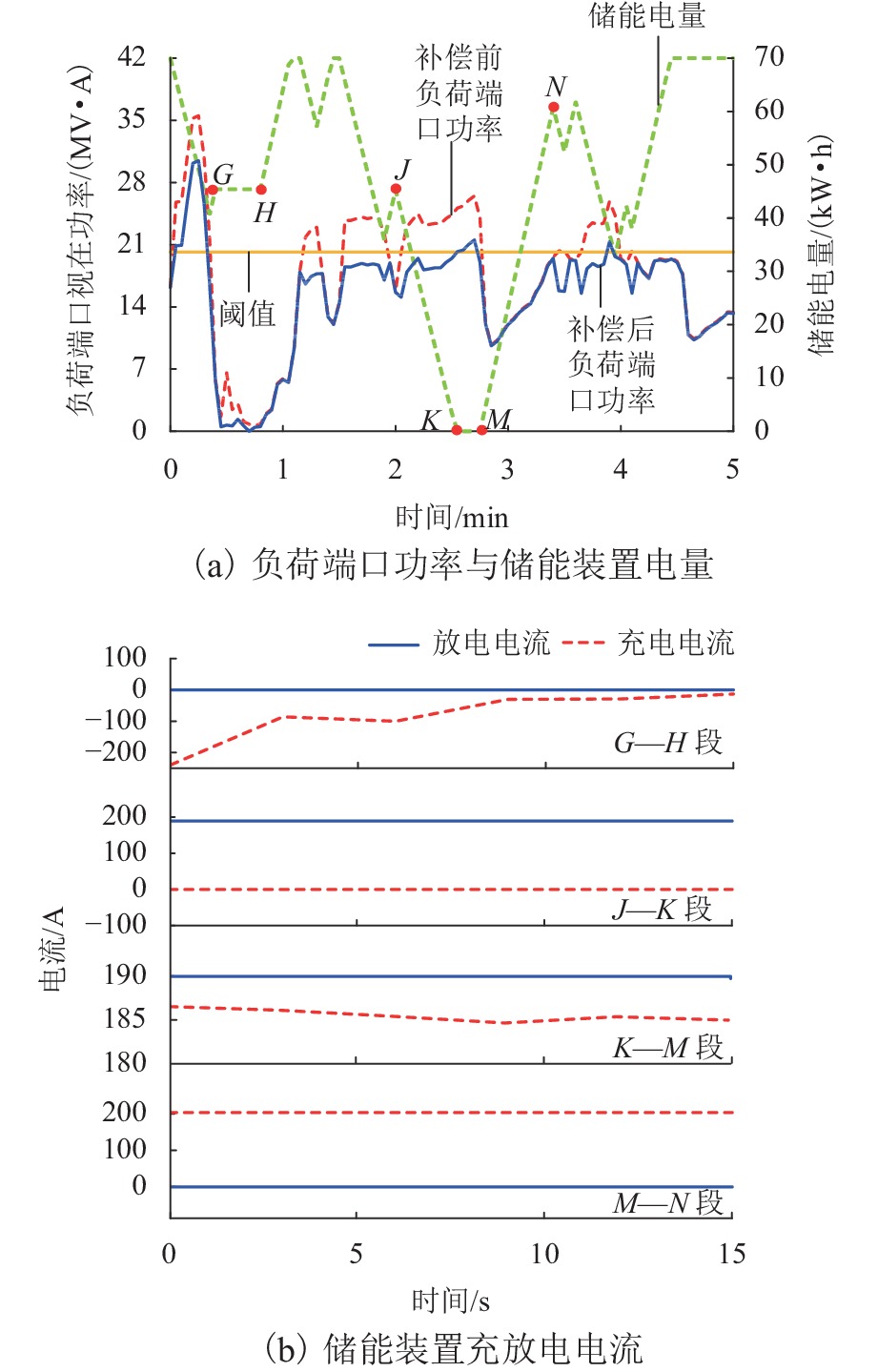
国家标准《电能质量 三相电压不平衡》(GB/T 15543—2008)[15]规定:接于公共连接点的每个负荷在公共连接(point of common coupling,PPC)点处引起的负序电压不平衡度的95%概率大值εU95%⩽1.3%,其最大值εUmax⩽2.6%. 对于任意单相负荷,其引起的负序电压不平衡度与负荷功率成正比. 若当负荷功率大于某一功率Sε时,负序便超标,即可设置Sε为储能装置的启动阈值功率. 此时,由牵引变压器和储能装置共同承担负荷功率,限制牵引变压器功率在Sε之下,以达到降低负序的目的.
高建敏,翟婉明,王开云,等. 高速行车条件下轨道几何不平顺敏感波长研究[J]. 铁道学报,2012,34(7): 83-88. GAO Jianmin, ZHAI Wanming, WANG Kaiyun, et al. Study on sensitive wavelengths of track irregularities-larities in high-speed operation[J]. Journal of the China Railway Society, 2012, 34(7): 83-88.
GAO Zhan, FENG Qibo, WU Sijin. Track irregularity inspection trolley based on fiber-optic gyro[J]. Journal of Micro-Nanolithography MEMS and MOEMS, 2010, 9(1): 83-88.
陈果,翟婉明,左洪福. 250 km/h高速铁路轨道不平顺的安全管理[J]. 西南交通大学学报,2001,36(5): 495- 499. CHEN Guo, ZHAI Wanming, ZUO Hongfu. Safety management of track irregularities of 250 km/h high-speed railway[J]. Journal of Southwest Jiaotong University, 2001, 36(5): 495- 499.
魏世斌,刘伶萍,刘维桢,等. 提速线路轨道长波不平顺检测技术[J]. 中国铁道科学,2010,31(2): 141-144. WEI Shibin, LIU Lingping, LIU Weizhen, et al. Technology for the measurement-ement of long-wavelength track irregularity of speed-up railway[J]. China Railway Science, 2010, 31(2): 141-144.
ZHAI Wanming. SUN Xiang. A detailed model for investigating vertical interaction between railway vehicle and track[J]. International Journal of Vehicle Mechanics and Mobility, 1994, 23: 603-615.
向俊,曾庆元. 轨道三角坑对列车脱轨安全性的影响分析[J]. 长沙铁道学院学报,2001,19(1): 4-8,13. XIANG Jun, ZENG Qingyuan. Analysis of the effect of the track twist irregularity on the train derailment safety[J]. Journal of Changsha Railway University, 2001, 19(1): 4-8, 13.
蔡成标,翟婉明,王其昌. 轨道几何不平顺安全限值的研究[J]. 铁道学报,1995,17(4): 82-87. CAI Chengbiao, ZHAI Wanming, WANG Qichang. Study on allowable safety criterion of track geometric irregularities[J]. Journal of the China Railway Society, 1995, 17(4): 82-87.
王兴宇,苏建,梁树林,等. 用于转向架刚度测试的六自由度加载平台控制策略[J]. 大连交通大学学报,2010,31(5): 14-20. WANG Xingyu, SU Jian, LIANG Shulin, et al. Study of bogie stiffness test control strategy for six-d of loading plate[J]. Journal of Dalian Jiaotong University, 2010, 31(5): 14-20.
KRISHNAMURTHY P, KHORRAMI F, FUJIKAWA S. A modeling framework for six degree-of-freedom control of unmanned sea surface vehicles[C]//Proceedings of the 2005 IEEE Conference on Decision and Control. Seville: , 2005: 2676-2681.
GALLARDO J, LESSO R, RICO J M, et al.The kinematics of modular spatial hyper-redundant manipulators formed from RPS-type limbs[J]. Robotics and Autonomous Systems, 2011, 58(1): 12-21.
DALVAND M M, SHIRINZADEH B. Forward kinematics analysis of offset 6-RRCRR manipulators[C]//Proceedings of the Mechanical Engineers. London: SAGE Publications, 2011: 3011-3018.
刘玉梅,曹晓宁,苏建,等. 转向架测试6自由度模拟平台位姿正解解算[J]. 江苏大学学报:自然科学版,2012,33(6): 621-625. LIU Yumei, CAO Xiaoning, SU Jian, et al. Forward kinematics solution of 6 degree of freedom simulation platform for bogie test[J]. Journal of Jiangsu University: Natural Science Edition, 2012, 33(6): 621-625.
ZHANG Liyan, JIA Ying, HAN Dushuo, LEI Wanliang. Energy Management and Capacity Allocation Scheme for Co-phase Traction Power Supply and Energy Storage System in Electrified Railways[J]. Journal of Southwest Jiaotong University, 2023, 58(1): 22-29. doi: 10.3969/j.issn.0258-2724.20210247
ZHANG Liyan, JIA Ying, HAN Dushuo, LEI Wanliang. Energy Management and Capacity Allocation Scheme for Co-phase Traction Power Supply and Energy Storage System in Electrified Railways[J]. Journal of Southwest Jiaotong University, 2023, 58(1): 22-29. doi: 10.3969/j.issn.0258-2724.20210247












 下载:
下载:


























































































































 DownLoad:
DownLoad: