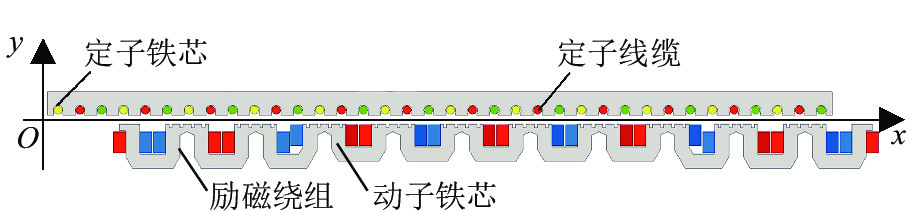
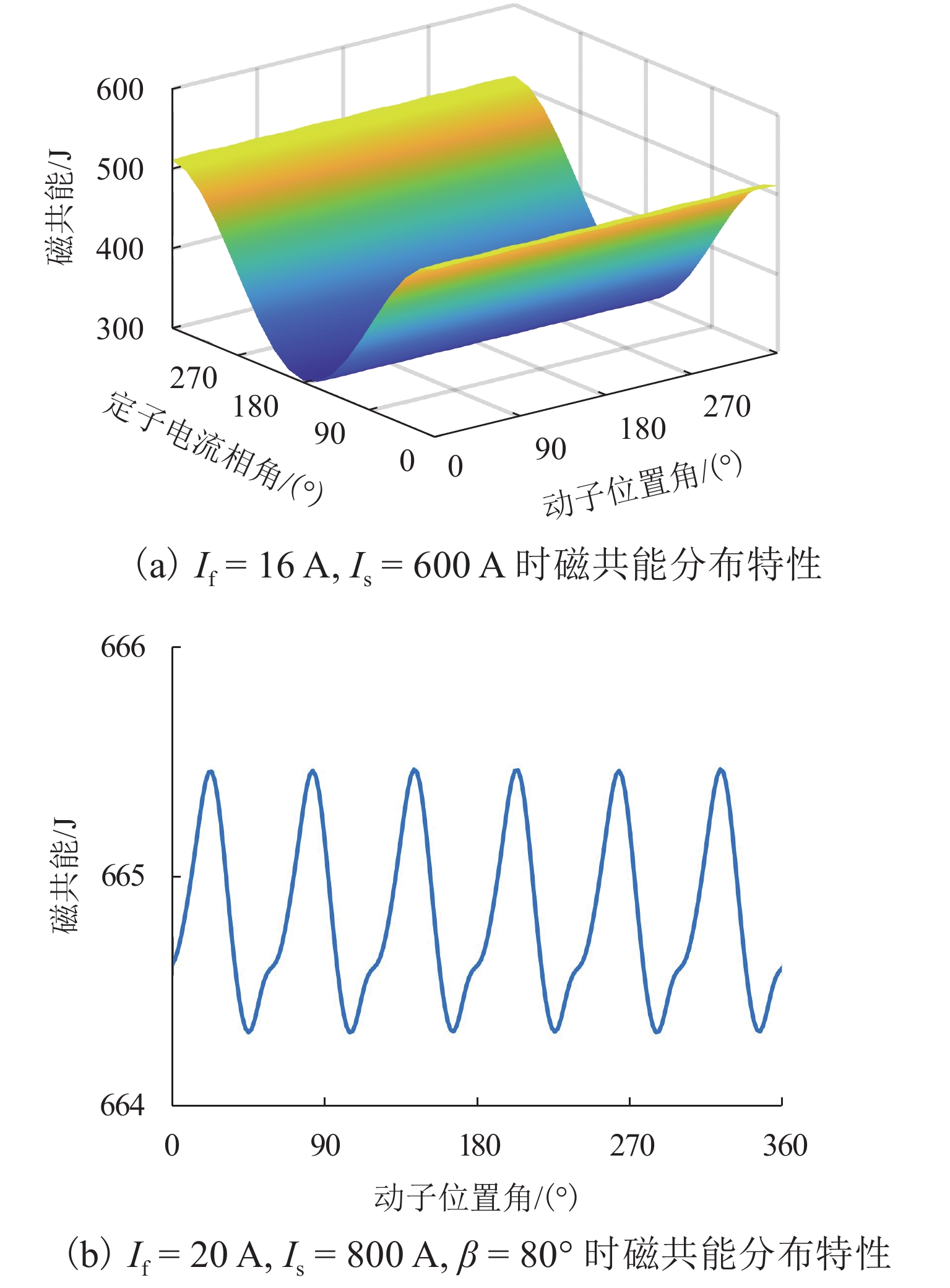
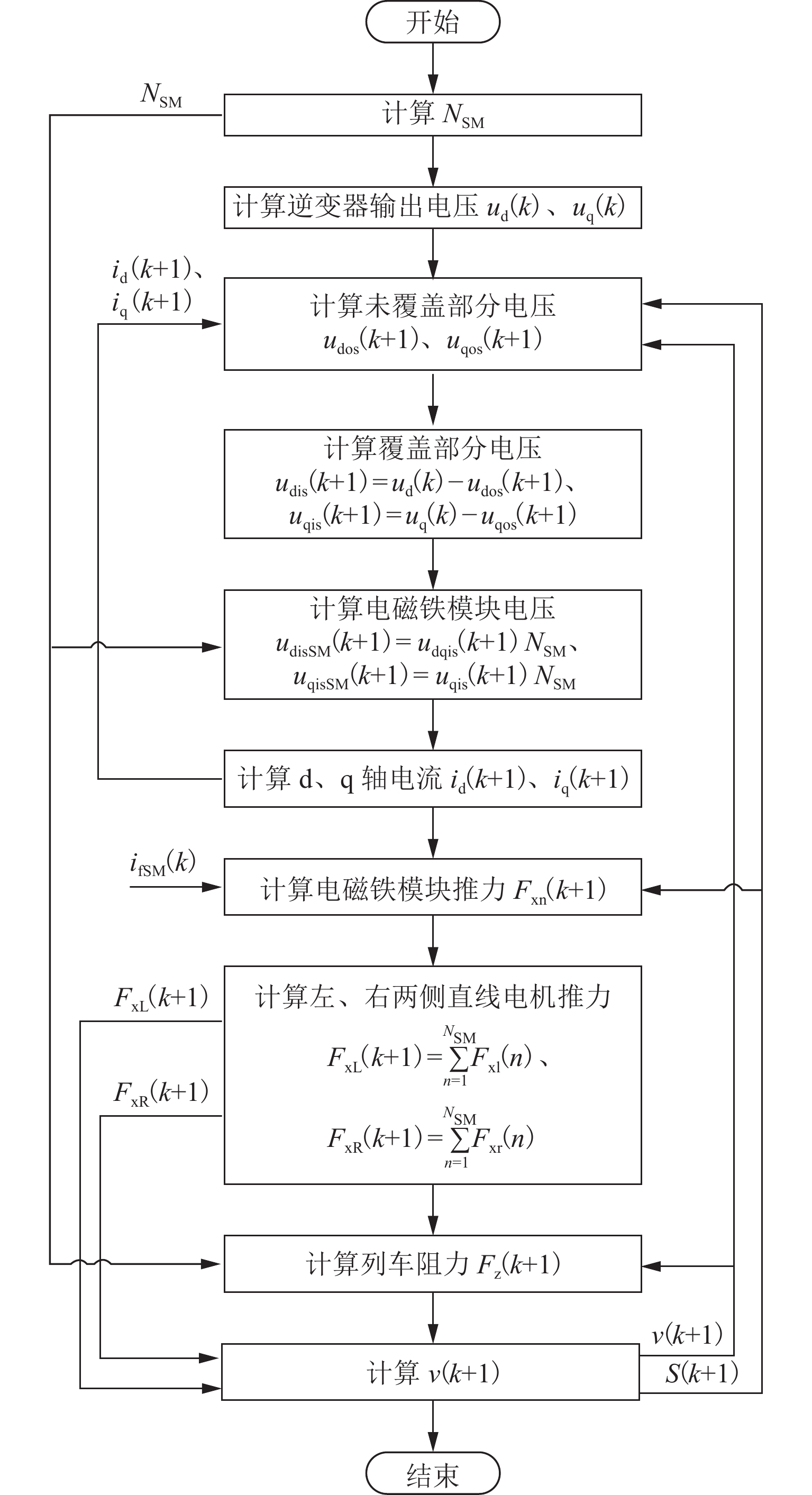
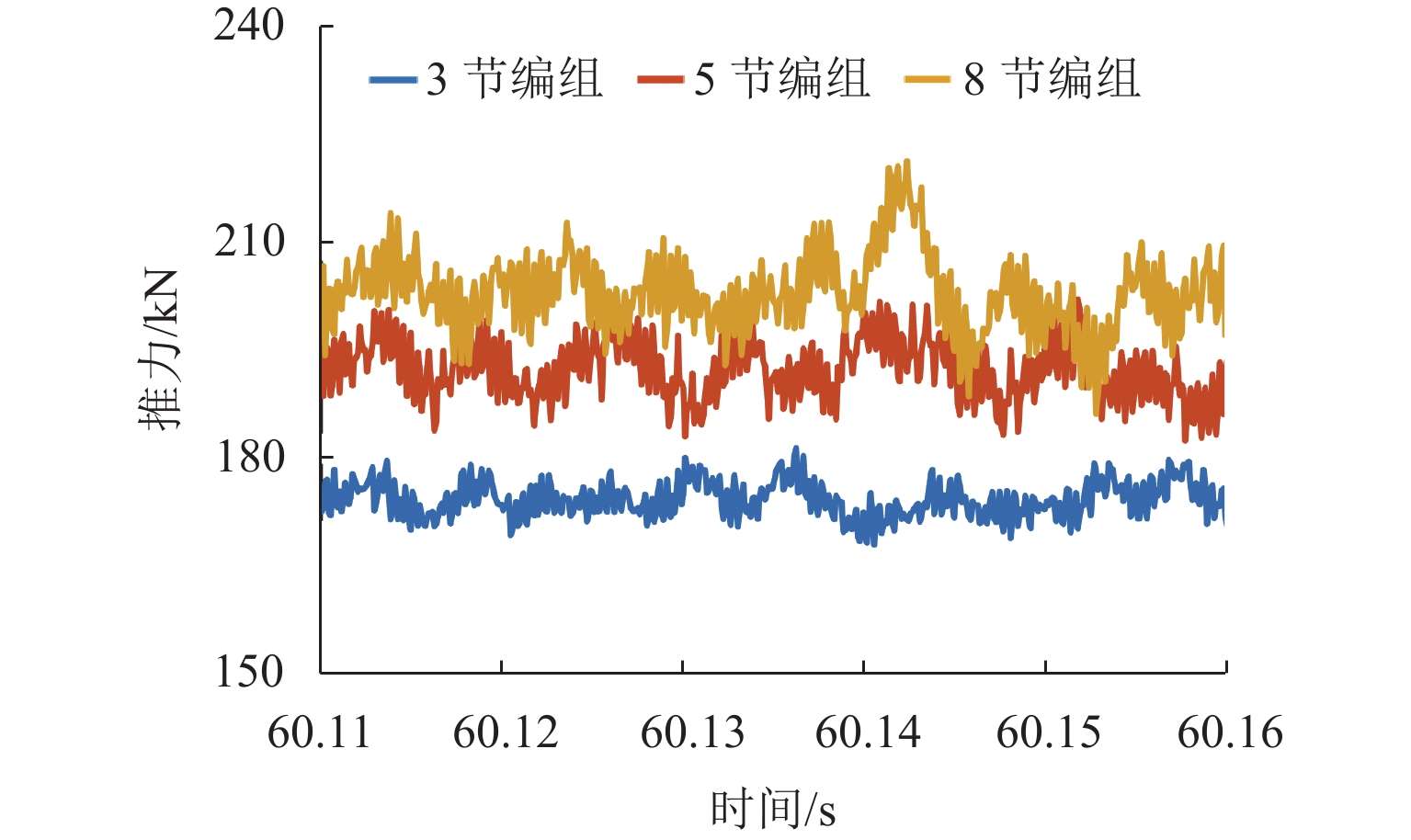
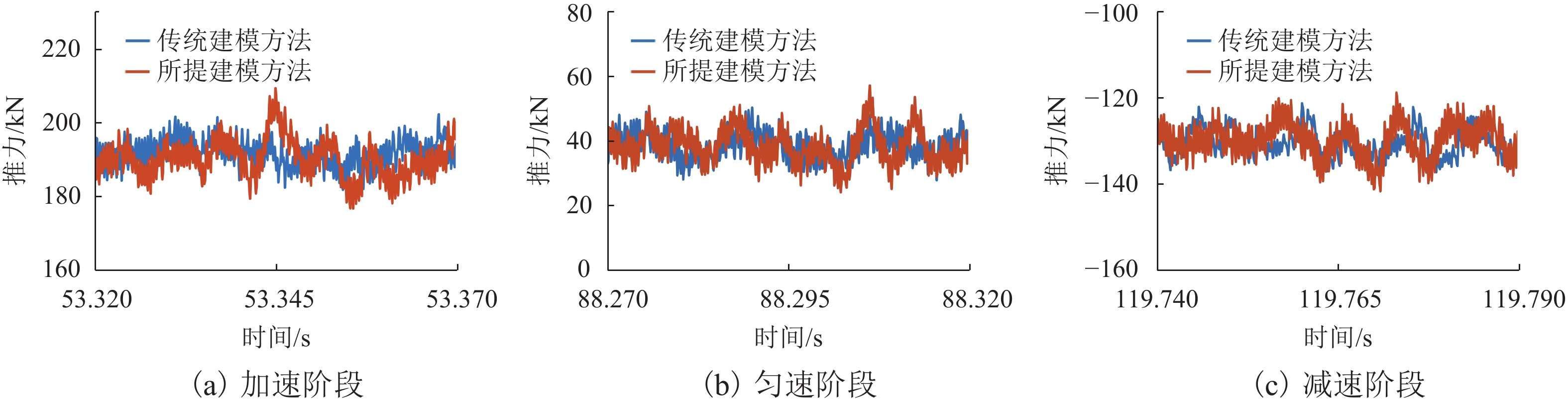
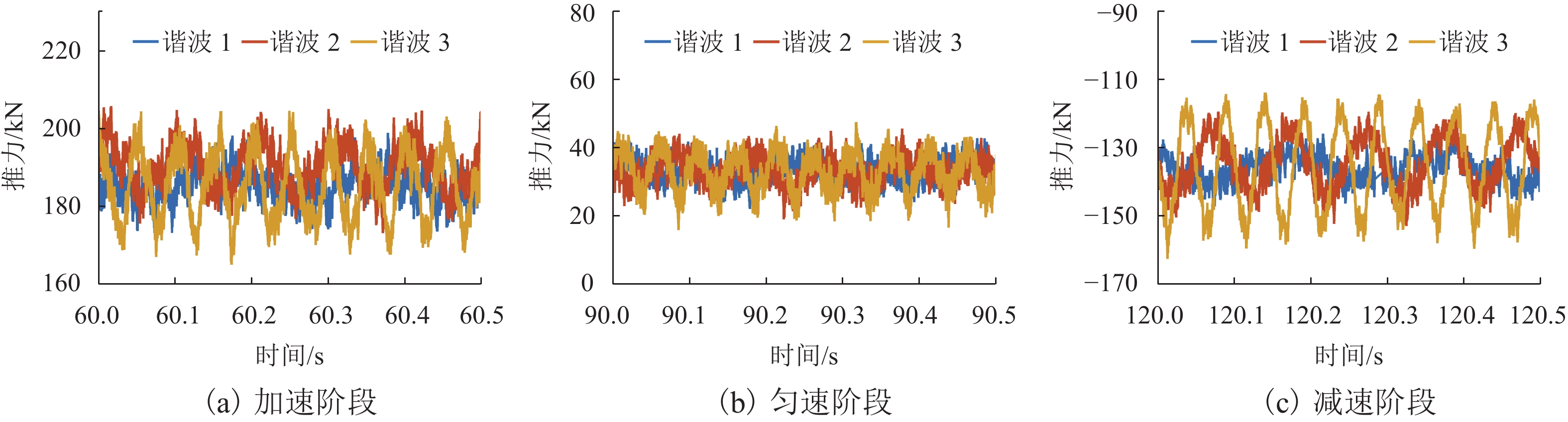
To enhance the modeling accuracy of high-speed maglev linear synchronous motors, a distributed parameter modeling method considering the influence of the suspension system was proposed based on the magnetic co-energy reconstruction of the electromagnetic module. Firstly, a finite element model of the electromagnetic module of a high-speed maglev train was established. Finite element numerical analysis was conducted to obtain magnetic co-energy data of the electromagnet module under different operating conditions. The magnetic co-energy was then subjected to Fourier series expansion and polynomial fitting to construct an analytical model of the magnetic co-energy. Subsequently, based on the analytical model of the magnetic co-energy, equations for the flux linkage, voltage, and thrust force of the electromagnetic module were derived. Then, mathematical models for the left and right linear synchronous motors based on the number of train formations and the number of electromagnetic modules were established, and the position and velocity of the high-speed maglev train were calculated through kinematic equations. Finally, the proposed modeling method was validated through experiments using a hardware-in-the-loop simulation system. The experimental results indicate that compared to traditional modeling methods, the proposed modeling method increases the amplitude of thrust fluctuations by more than 6.8%. Moreover, the proposed method can accurately characterize the influence of the suspension system on traction control. When the harmonic amplitude of the excitation current increases by 0.5 A, 1.0 A, and 2.0 A, the maximum increase in the amplitude of thrust fluctuations is 54.3%, 26.2%, and 83.7%, respectively. Furthermore, when the harmonic frequency of the excitation current is at 5 Hz, 10 Hz, and 20 Hz, the harmonic frequency of the thrust reaches up to 5.14%, 21.75%, and 14.17%, respectively.


 Advance Search
Advance Search
 Email alert
Email alert RSS
RSS [Abstract]
[Abstract] [FullText HTML]
[FullText HTML] PDF 2997KB
PDF 2997KB Supplements
Supplements [Cited By]
[Cited By]