- ISSN 0258-2724
- CN 51-1277/U
- EI Compendex
- Scopus
- Indexed by Core Journals of China, Chinese S&T Journal Citation Reports
- Chinese S&T Journal Citation Reports
- Chinese Science Citation Database

| Citation: | XU Xianze, SONG Mingxing, GONG Yongxing, XU Fengqiu, WANG Dijin, SUI Bowen, GUO Qingquan. Fractional-Order Sliding Mode Control for Maglev Rotary Table Based on Disturbance Compensation[J]. Journal of Southwest Jiaotong University, 2024, 59(4): 766-775. doi: 10.3969/j.issn.0258-2724.20230412

|
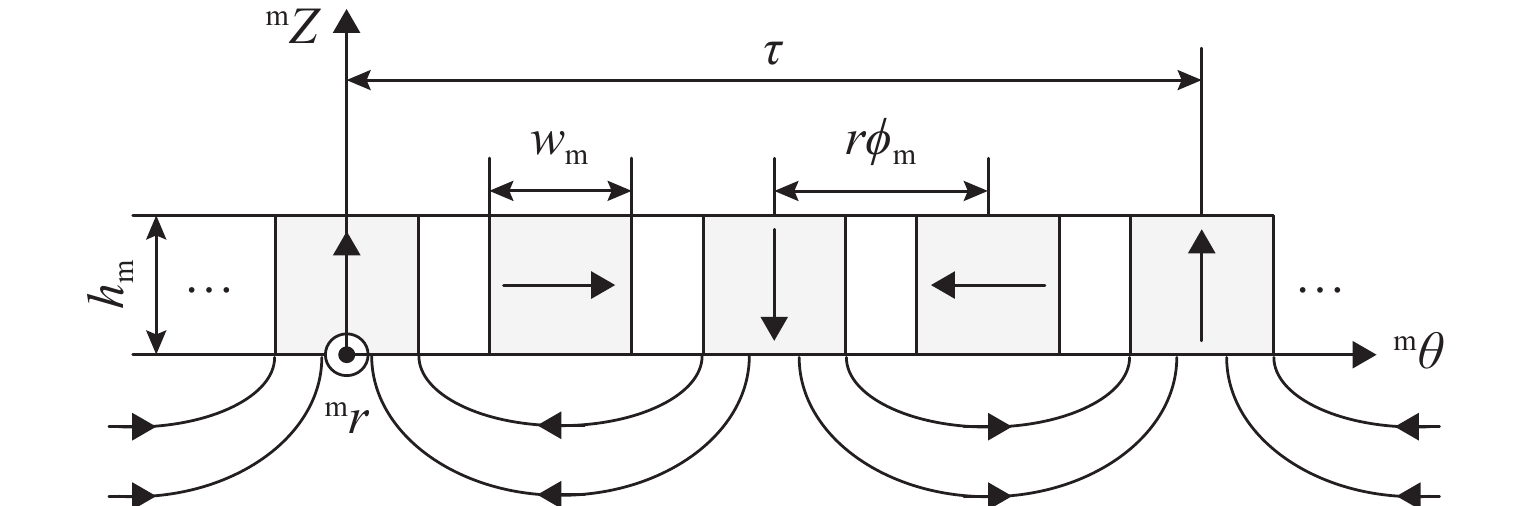
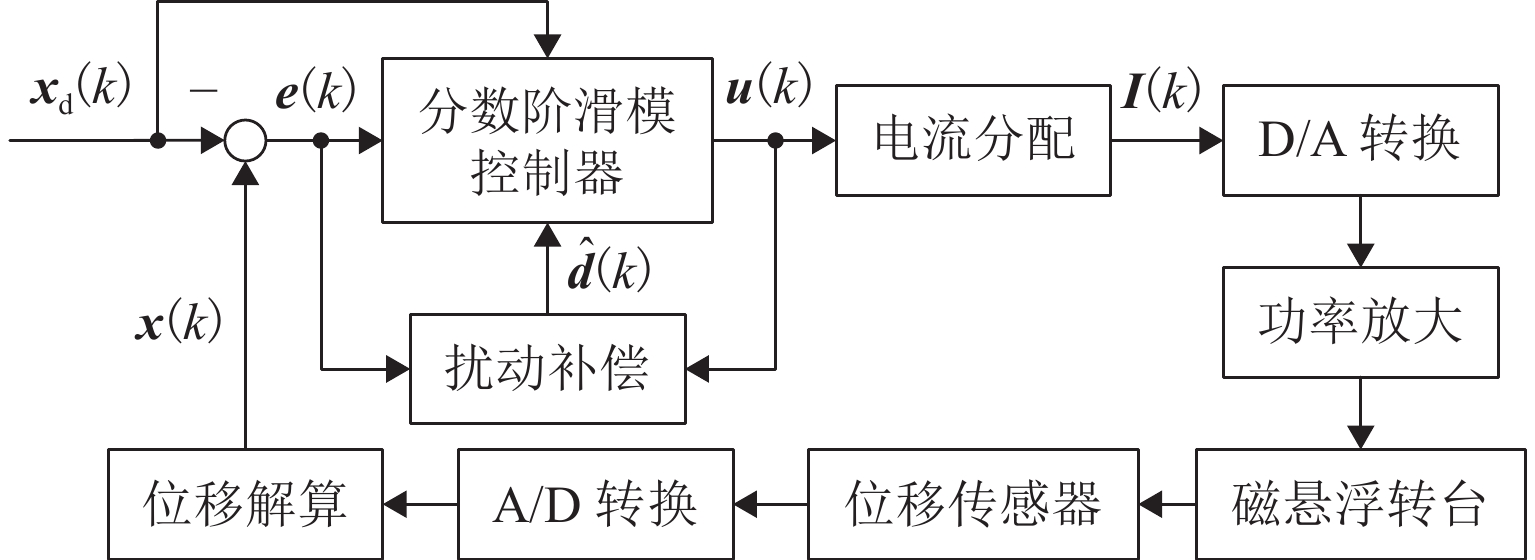
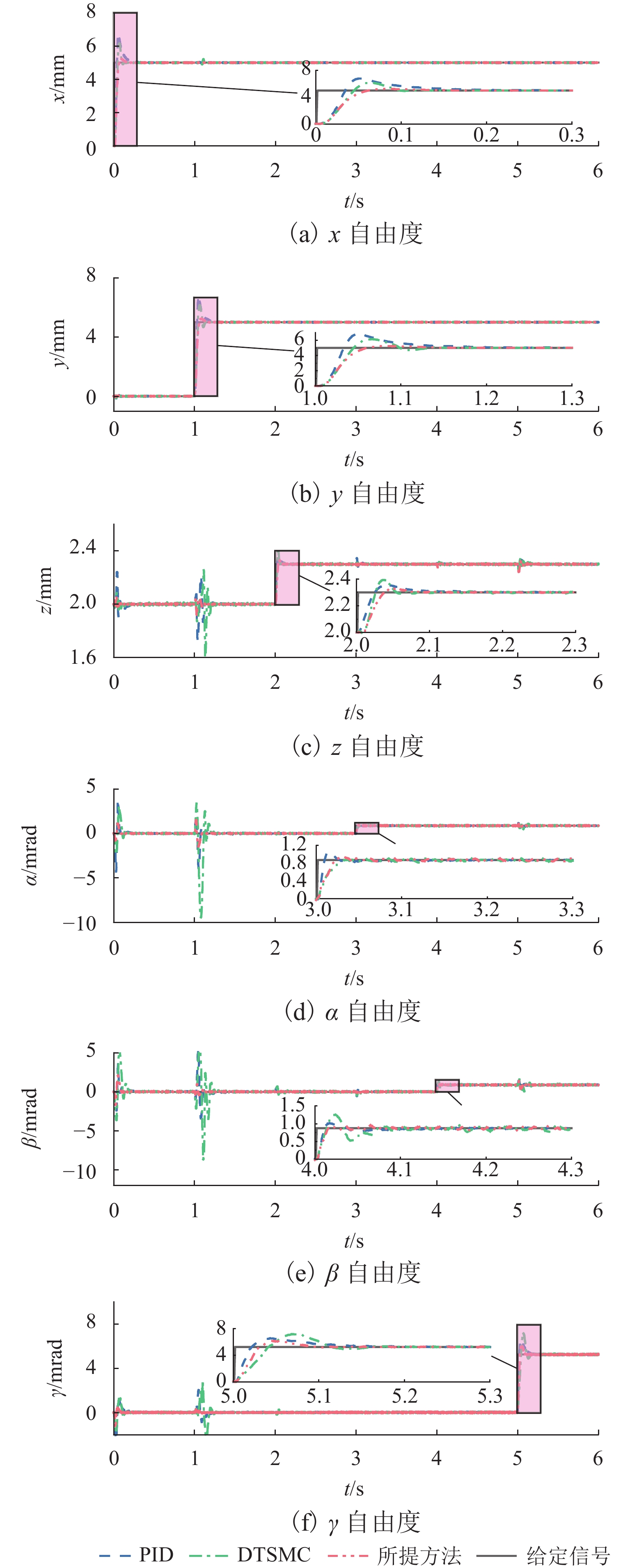
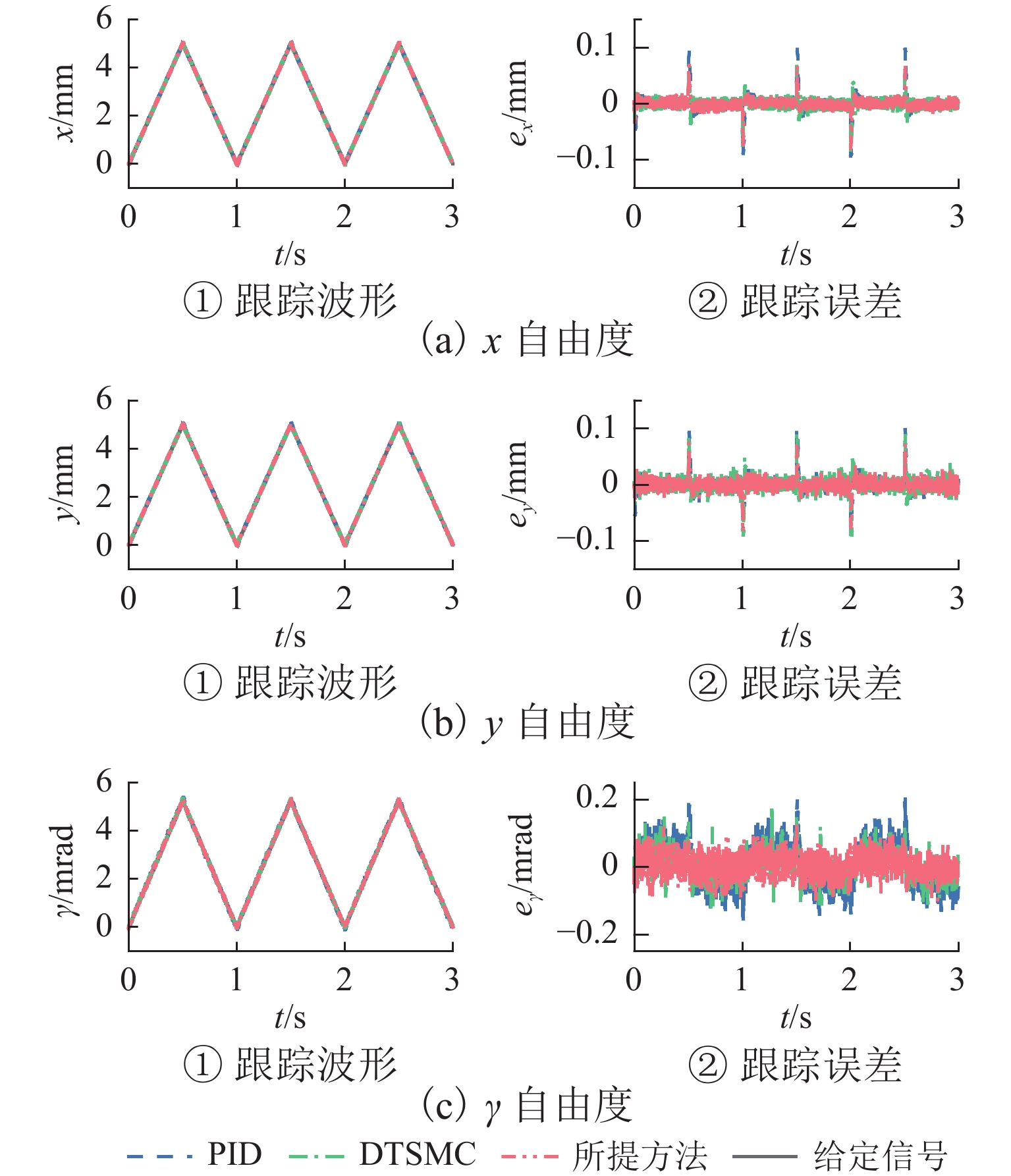
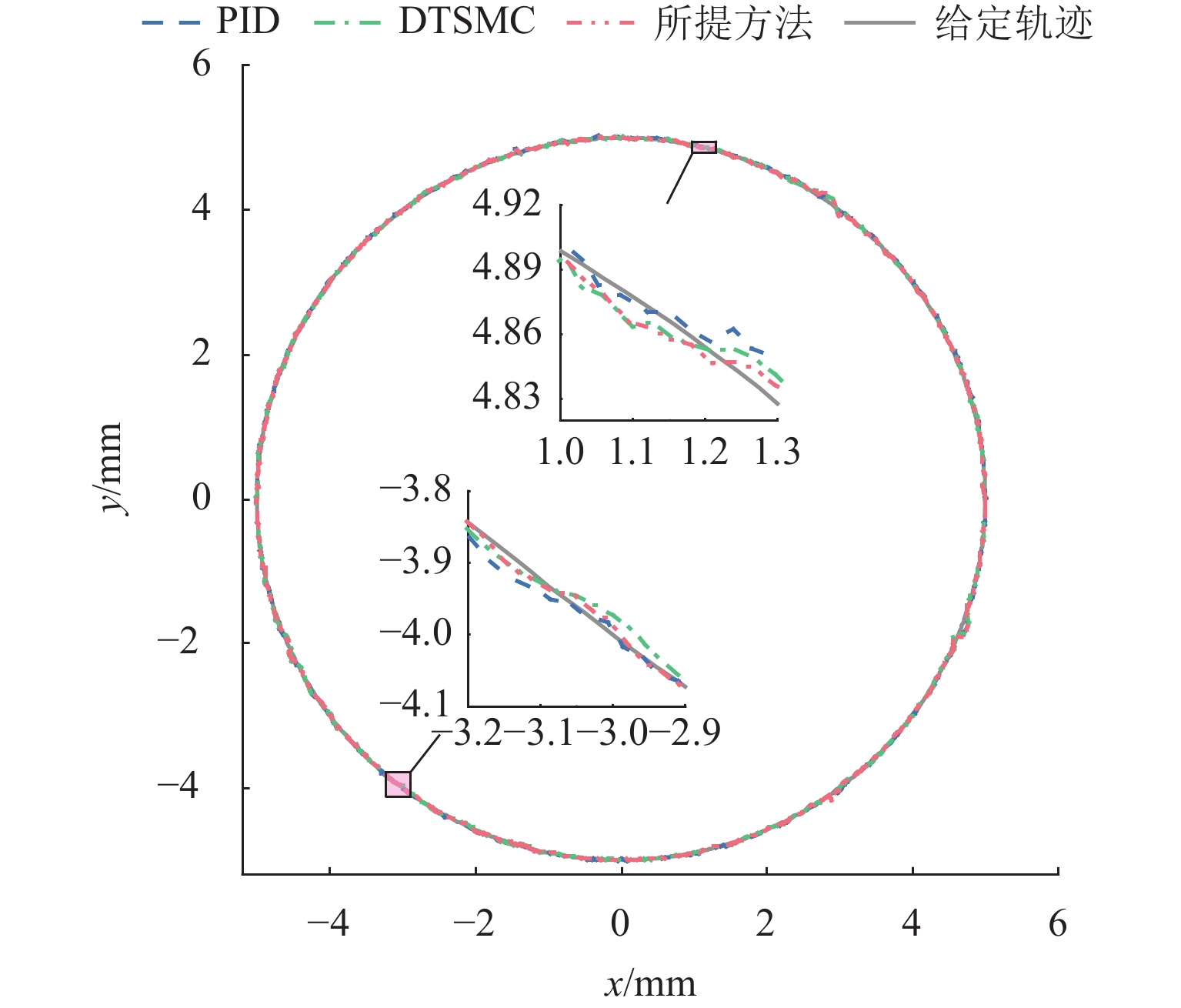
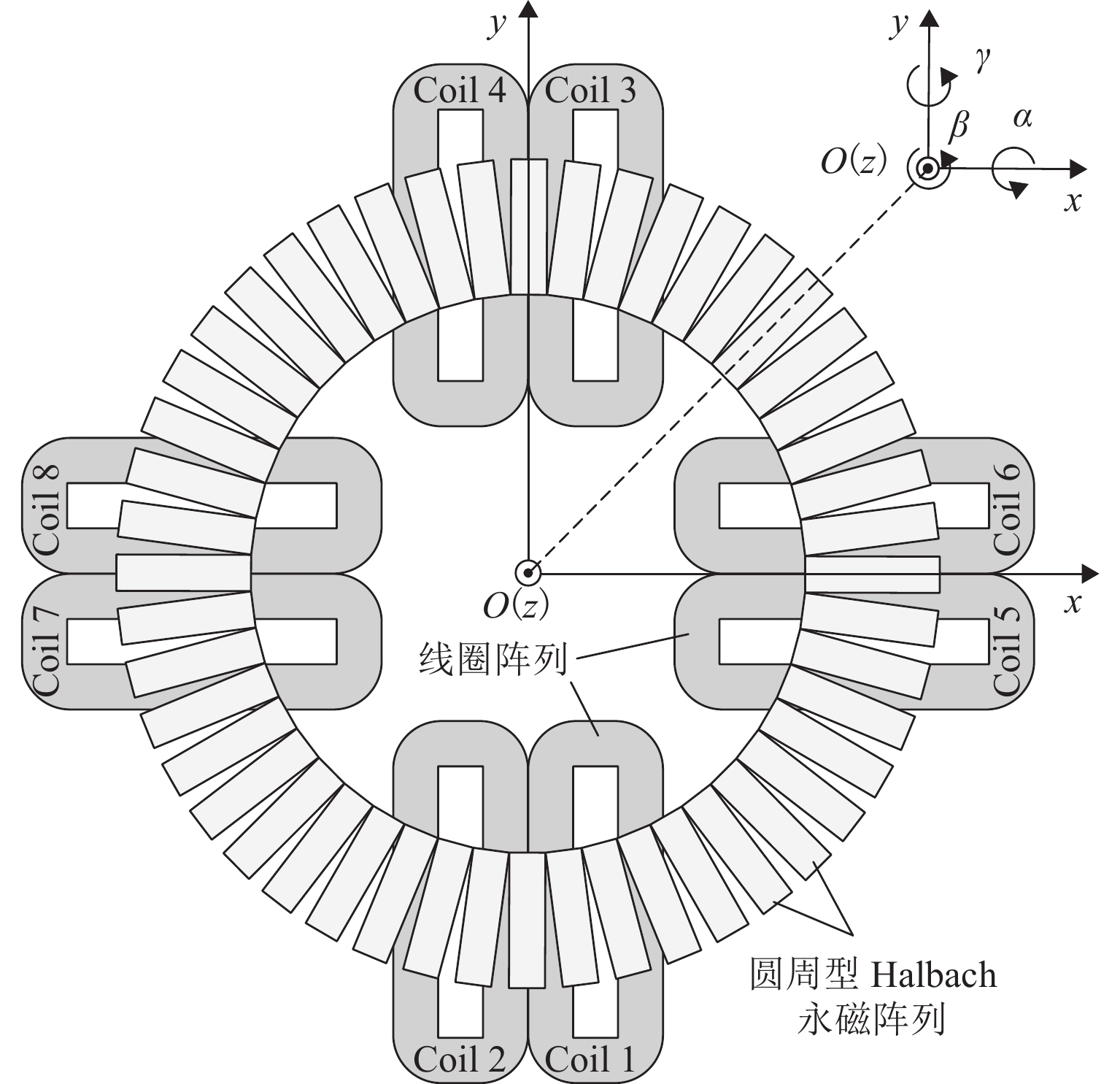
In view of the high-precision motion control problem of the maglev rotary table with nonlinearity, coupling, and uncertainty, a fractional-order sliding mode control method based on a nonlinear disturbance observer was proposed to improve the tracking accuracy. Firstly, based on the electromagnetic force model of the system and the dynamic decoupling method, the dynamical model of the six-degree-of-freedom maglev rotary table system was constructed. Secondly, a nonlinear disturbance observer was designed to estimate the lumped disturbance including system error, coupling term between six degrees of freedom, and external interference. It was proved that the estimation error was bounded and could be made arbitrarily small. Then, a fractional-order sliding surface was proposed in the discrete domain, where the fractional power function was used instead of the traditional symbolic function to suppress jitter, and the fractional calculus was introduced to reduce the tracking error. Finally, a fractional-order sliding mode control strategy with finite time convergence was designed, and the stability of the closed-loop system was proved by Lyapunov stability theory. The experimental results reveal that compared to the integer-order sliding mode control method, the proposed method reduces the root mean square of tracking error for triangular waves by 12.8%, 16.8%, and 23.7% for the two horizontal degrees of freedom and the rotational degree about the vertical axis, respectively, while the maximum tracking errors are reduced by 9.26%, 13.00%, and 33.20% respectively. When tracking a circular trajectory, the mean square values of tracking errors for two horizontal degrees of freedom are decreased by 6.39% and 12.40%, and the maximum tracking errors are reduced by 9.90% and 12.10%, respectively.

| [1] |
XU X Z, ZHENG C L, XU F Q. A real-time numerical decoupling method for multi-DoF magnetic levitation rotary table[J]. Applied Sciences, 2019, 9(16): 3263.1-3263.16.
|
| [2] |
ZHU H Y, TEO T J, PANG C K. Flexure-based magnetically levitated dual-stage system for high-bandwidth positioning[J]. IEEE Transactions on Industrial Informatics, 2019, 15(8): 4665-4675. doi: 10.1109/TII.2019.2890951
|
| [3] |
LAHDO M, STRÖHLA T, KOVALEV S. Design and implementation of an new 6-DoF magnetic levitation positioning system[J]. IEEE Transactions on Magnetics, 2019, 55(12): 8107407.1-8107407.7.
|
| [4] |
SILVA-RIVAS J C, KIM W J. Multivariable control and optimization of a compact 6-DOF precision positioner with hybrid H2/H∞ and digital filtering[J]. IEEE Transactions on Control Systems Technology, 2013, 21(5): 1641-1651. doi: 10.1109/TCST.2012.2215035
|
| [5] |
LI D F, GUTIERREZ H. Observer-based sliding mode control of a 6-DOF precision maglev positioning stage[C]//2008 34th Annual Conference of IEEE Industrial Electronics. Orlando: IEEE, 2008: 2562-2567.
|
| [6] |
魏静波,罗浩,关子津. 基于干扰观测器的磁悬浮球系统全局快速终端滑模控制[J]. 西南交通大学学报,2023,58(4): 836-844.
WEI Jingbo, LUO Hao, GUAN Zijin. Global fast terminal sliding mode control for maglev ball system based on disturbance observer[J]. Journal of Southwest Jiaotong University, 2023, 58(4): 836-844.
|
| [7] |
DU H B, YU X H, LI S H. Dynamical behaviors of discrete-time fast terminal sliding mode control systems[M]//Recent Advances in Sliding Modes: From Control to Intelligent Mechatronics. Cham: Springer, 2015: 77-97.
|
| [8] |
ZHANG L, ZHANG Z, HUANG L. Hybrid non-linear differentiator design for a permanent-electro magnetic suspension maglev system[J]. IET Signal Processing, 2012, 6(6): 559-567. doi: 10.1049/iet-spr.2011.0264
|
| [9] |
NGUYEN S D, LAM B D, NGO V H. Fractional-order sliding-mode controller for semi-active vehicle MRD suspensions[J]. Nonlinear Dynamics, 2020, 101(2): 795-821. doi: 10.1007/s11071-020-05818-w
|
| [10] |
SUN G H, MA Z Q, YU J Y. Discrete-time fractional order terminal sliding mode tracking control for linear motor[J]. IEEE Transactions on Industrial Electronics, 2018, 65(4): 3386-3394. doi: 10.1109/TIE.2017.2748045
|
| [11] |
KUANG Z A, GAO H J, TOMIZUKA M. Precise linear-motor synchronization control via cross-coupled second-order discrete-time fractional-order sliding mode[J]. IEEE/ASME Transactions on Mechatronics, 2021, 26(1): 358-368.
|
| [12] |
HU C X, WANG Z, ZHU Y, et al. Performance-oriented precision LARC tracking motion control of a magnetically levitated planar motor with comparative experiments[J]. IEEE Transactions on Industrial Electronics, 2016, 63(9): 5763-5773. doi: 10.1109/TIE.2016.2538743
|
| [13] |
JANSEN J W, VAN LIEROP C M M, LOMONOVA E A, et al. Magnetically levitated planar actuator with moving magnets[J]. IEEE Transactions on Industry Applications, 2008, 44(4): 1108-1115. doi: 10.1109/TIA.2008.926065
|
| [14] |
DYCK M, LU X D, ALTINTAS Y. Magnetically levitated rotary table with six degrees of freedom[J]. IEEE/ASME Transactions on Mechatronics, 2017, 22(1): 530-540. doi: 10.1109/TMECH.2016.2621108
|
| [15] |
YANG H L, DENG F, HE Y, et al. Robust nonlinear model predictive control for reference tracking of dynamic positioning ships based on nonlinear disturbance observer[J]. Ocean Engineering, 2020, 215: 107885.1-107885.7.
|
| [16] |
LU X, XU F Q, XU X Z, et al. Directed-driven 8-phase magnetically levitated rotary table based on an analytical-numerical model[J]. IEEE Access, 2020, 8: 31159-31170. doi: 10.1109/ACCESS.2020.2973223
|
Figures(7) / Tables(4)


 DownLoad:
DownLoad: