

Technologies Research Review of Electro-Magnetic Suspension Medium−Low-Speed Maglev Train Levitation Frame
-
摘要:
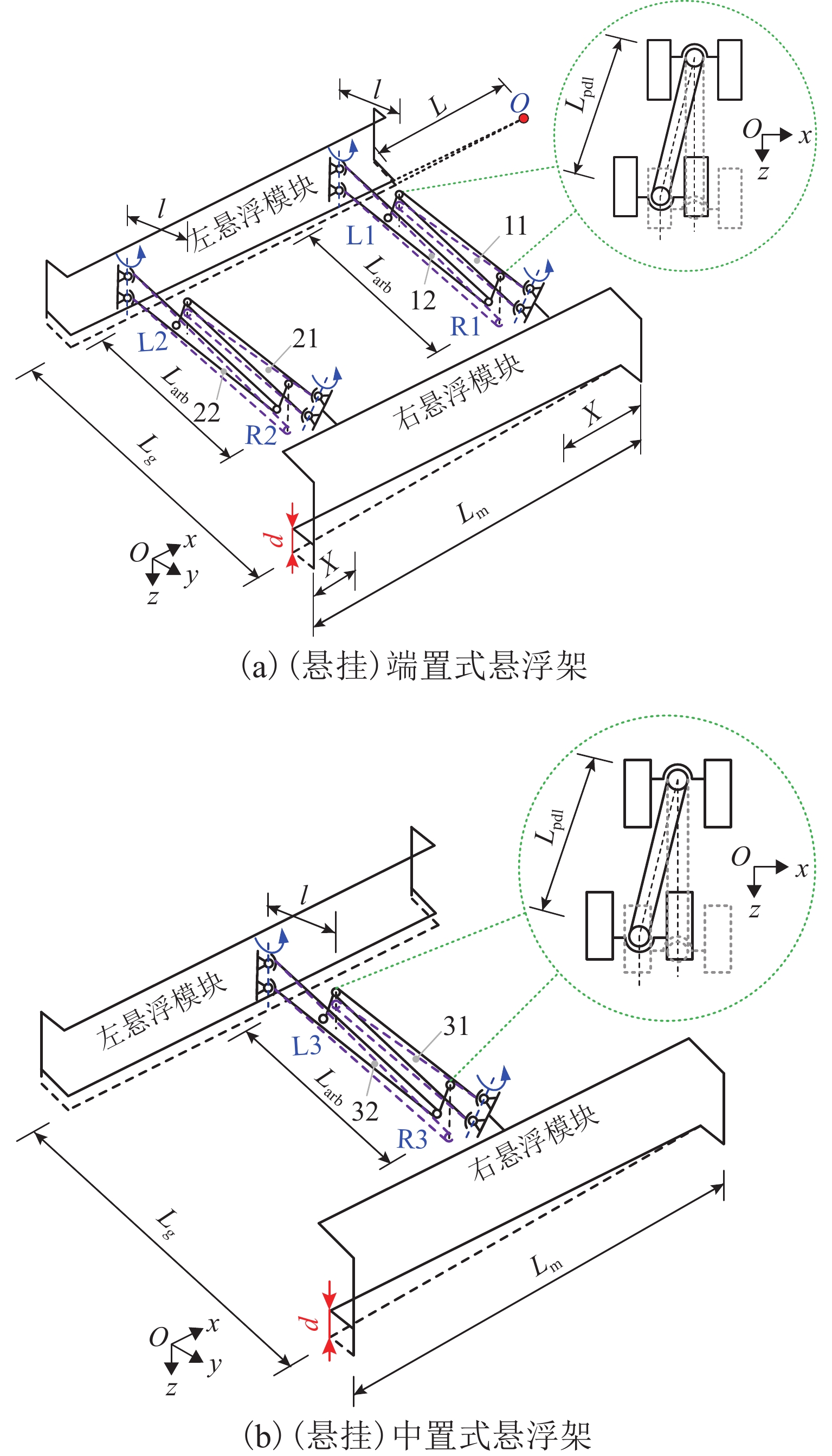
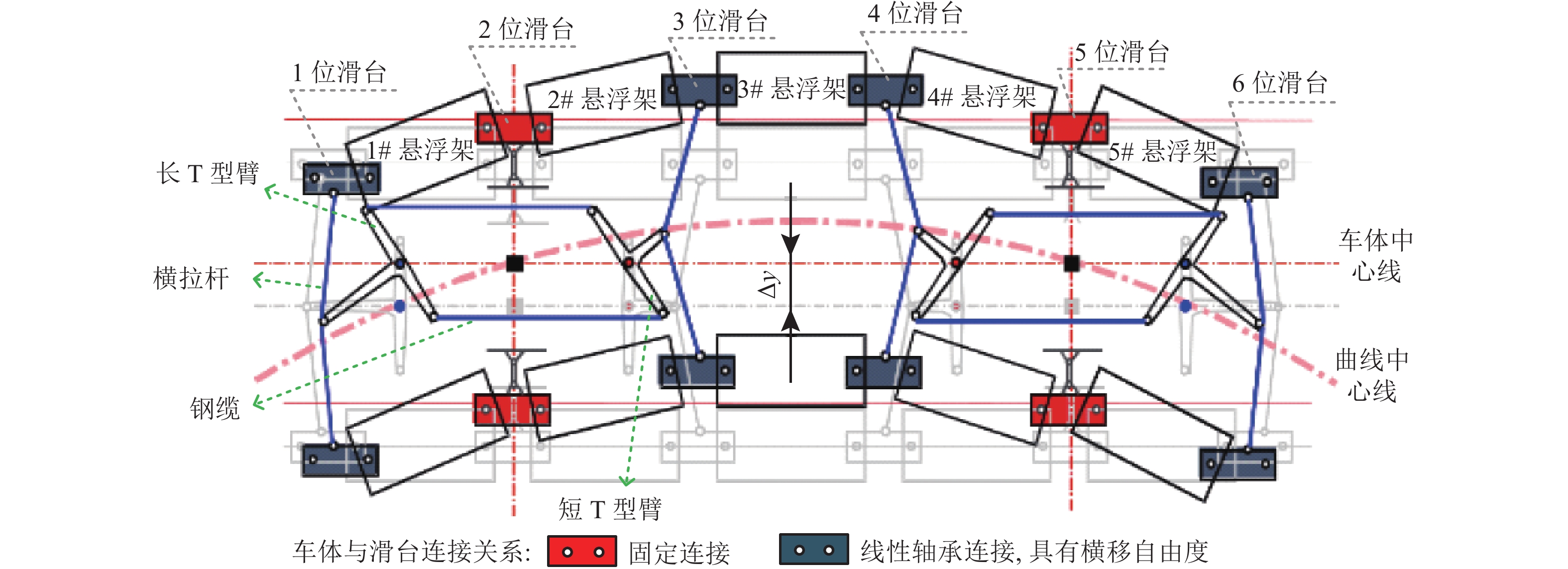
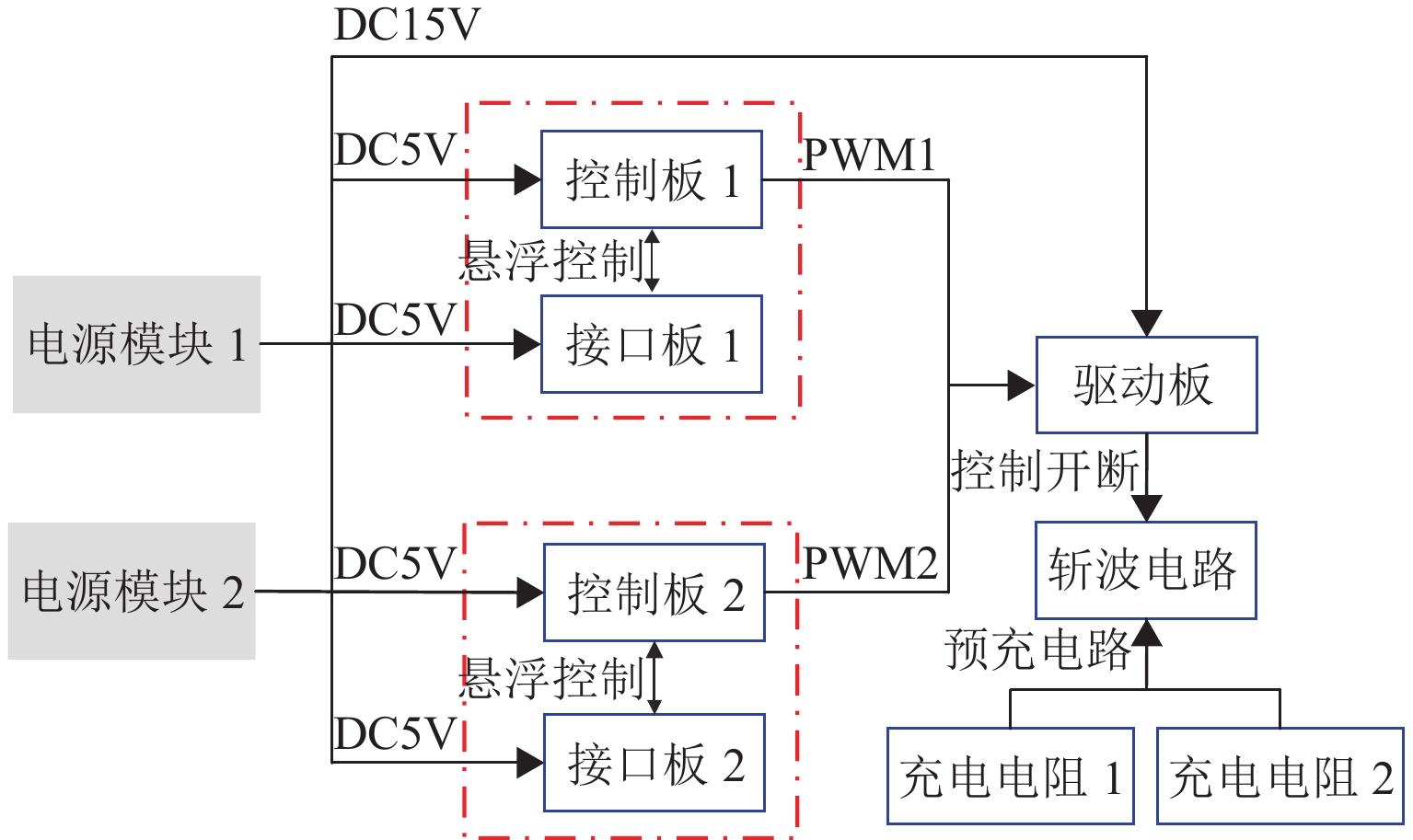
悬浮架是承载EMS(electro-magnetic suspension)型中低速磁浮列车运行的关键子系统,影响列车的悬浮稳定性、舒适性和安全性,需要对其进行深入研究. 围绕国内外EMS型中低速磁浮列车应用案例,介绍了(悬挂)端置式悬浮架、(悬挂)中置式悬浮架的技术方案和特征,总结了主要技术指标. 结合悬浮架技术研究、发展现状,讨论了磁轨作用关系、运动解耦能力、动力学性能、结构强度以及悬浮冗余设计五大研究方向,通过对研究内容梳理和总结,归纳了现有前沿科学问题和工程技术挑战:一是轨距亟须统一;二是动态磁轨关系研究欠缺;三是悬浮架横向动力学有待研究;四是悬浮架疲劳强度分析及试验不足;五是悬浮架机械结构冗余设计方案较少.
Abstract:The levitation frame is a key subsystem that carries EMS (electro-magnetic suspension) medium−low-speed maglev trains, which affects the levitation stability, comfort and safety of the train and needs to be studied in depth. According to domestic and overseas current application cases of EMS medium-low speed maglev trains, the technical solutions, and characteristics of (suspension) end-set levitation frame and (suspension) mid-set levitation frame are concluded, and the key technical indexes are summarized. With the combination of current research and development status of levitation frame technologies, the five major technical research contents which are magnetic-rail interaction relationship, motion decoupling capability, dynamics performance, structural strength and levitation redundant design are discussed. In addition, the existing frontier scientific issues and engineering challenges are summarized by sorting out and summarizing the research contents: first, the track gauge should be unified; second, the dynamic magnetic-rail relationship research is lacking; third, the lateral dynamics of levitation frames needs to be studied; fourth, the fatigue strength analysis and test of the levitation frame is insufficient; fifth, the levitation frame mechanical structure redundant design scheme is less.
-
表 1 EMS型中低速磁浮列车主要技术指标
Table 1. Main technical indexes of EMS medium-low speed maglev train
项目 轨距/mm 最高运行速度/
(km·h−1)最大爬坡
能力/‰最小曲线
半径
/m编组 单节车悬
浮架数量列车全长/m TKL磁浮 1700 100 70 50 3 5 43.3 仁川磁浮 1850 100 70 50 2 4 25 长沙磁浮 1860 140 70 50 3 5 48.3 北京磁浮 2000 120 70 50 6 5 89.6 (悬挂)中置式磁浮 1900 160 70 50 3 5 48.2  下载: 导出CSV
下载: 导出CSV
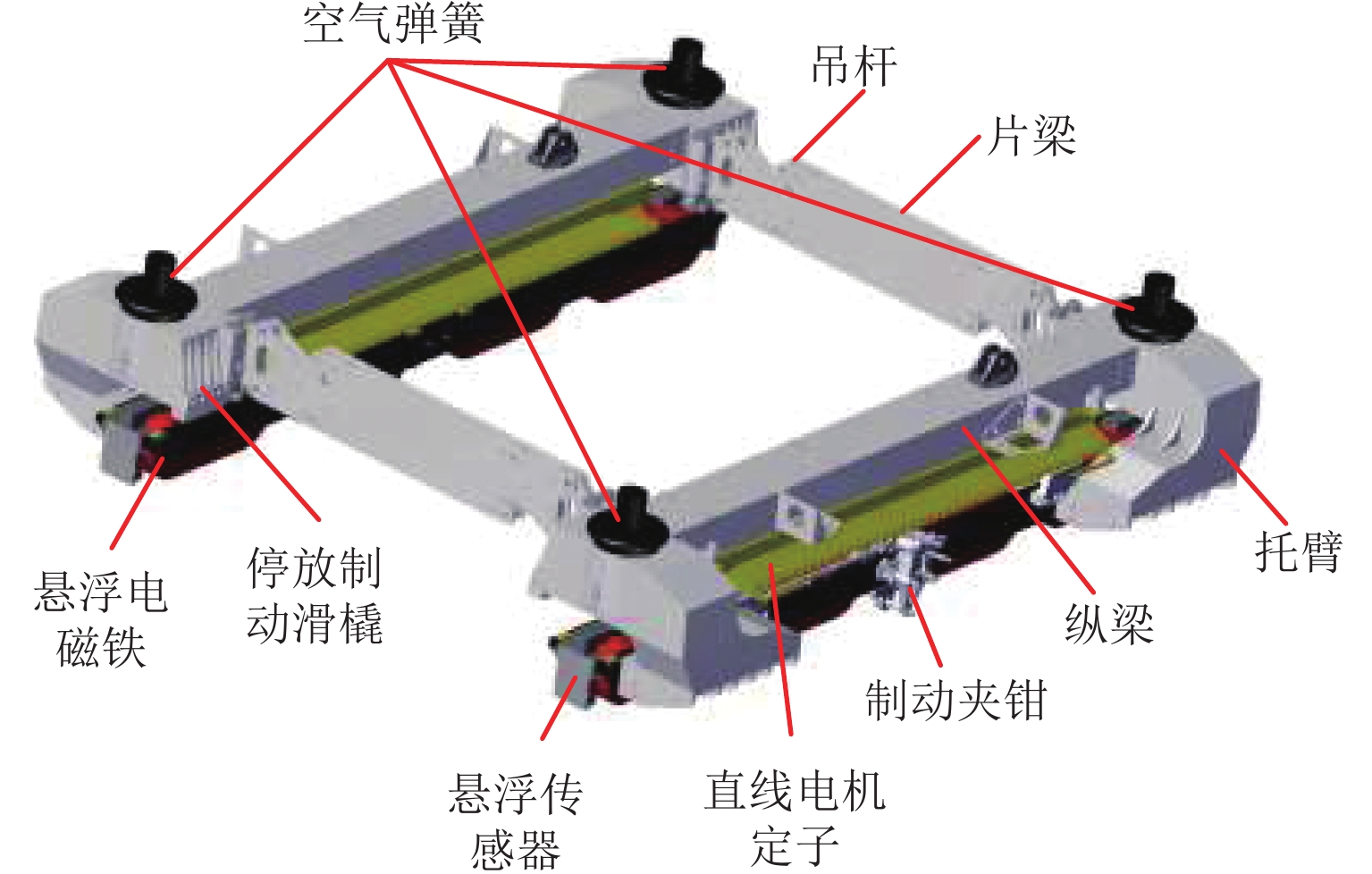
表 2 (悬挂)端置式悬浮架特征尺寸
Table 2. Technical parameters of levitation frame with end-set airspring
符号 定义 尺寸/mm Lm 悬浮模块长度 2720 Lg 轨距 1860 Larb 片梁长度 1030 l 吊杆距片梁安装座距离 226 Lpdl 吊杆长度 200 X 悬浮控制单元距防侧滚梁距离 273
下载: 导出CSV
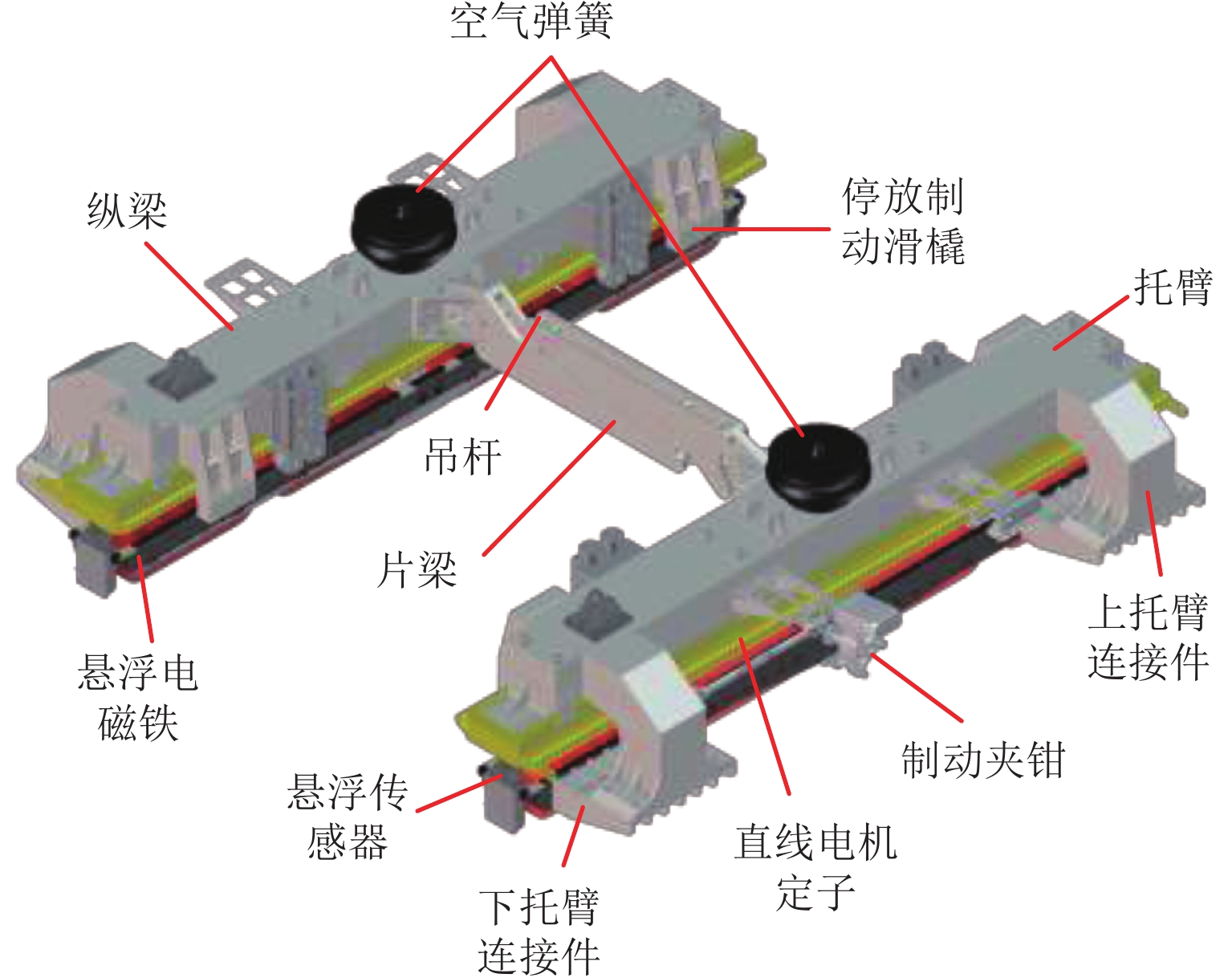
表 3 悬浮架主要结构材料及工艺
Table 3. Main structural materials and process of levitation frame
部件 材料 密度/(kg·m−3) 质量/kg 成型工艺 纵梁 6061 2800 110.39 挤压+机加工 托臂 ZL204A 2810 32.36 铸造+机加工 上托臂连接件 ZL204A 2810 29.42 铸造+机加工 下托臂连接件 ZL204A 2810 25.95 铸造+机加工 滑台 ZL204A 2810 26.10 铸造+机加工 牵引座 Q235 7850 4.57 拼焊+机加工 片梁 Q235 7850 16.96 激光切割+机加工 吊杆 Q235 7850 1.00 机加工
下载: 导出CSV
-
[1] 徐飞,罗世辉,邓自刚. 磁悬浮轨道交通关键技术及全速度域应用研究[J]. 铁道学报,2019,41(3): 40-49.XU Fei, LUO Shihui, DENG Zigang. Study on key technologies and whole speed range application of maglev rail transport[J]. Journal of the China Railway Society, 2019, 41(3): 40-49. [2] LEE H W, KIM K C, LEE J. Review of maglev train technologies[J]. IEEE Transactions on Magnetics, 2006, 42(7): 1917-1925. doi: 10.1109/TMAG.2006.875842 [3] YAN L G. Development and application of the maglev transportation system[J]. IEEE Transactions on Applied Superconductivity, 2008, 18(2): 92-99. doi: 10.1109/TASC.2008.922239 [4] 龚俊虎,谢海林,鄢巨平,等. 全速度谱系磁浮交通的技术发展与应用前景[J]. 城市轨道交通研究,2020,23(9): 61-64,69.GONG Junhu, XIE Hailin, YAN Juping, et al. Development and application prospect of full-speed spectrum maglev transportation technology[J]. Urban Mass Transit, 2020, 23(9): 61-64,69. [5] THORNTON R D. Efficient and affordable maglev opportunities in the United States[J]. Proceedings of the IEEE, 2009, 97(11): 1901-1921. doi: 10.1109/JPROC.2009.2030251 [6] TANDAN G K, SEN P K, SAHU G, et al. A review on development and analysis of maglev train[J]. International Journal of Research in Advent Technology, 2015, 3(12): 14-17. [7] GOU J S. Development status and global competition trends analysis of maglev transportation technology based on patent data[J]. Urban Rail Transit, 2018, 4(3): 117-129. doi: 10.1007/s40864-018-0087-3 [8] 张志洲,龙志强. 日本东部丘陵线磁悬浮系统技术综述[J]. 国外铁道车辆,2005,42(6): 7-11.ZHANG Zhizhou, LONG Zhiqiang. Technological survey of the maglev system of the east hillside line in Japan[J]. Foreign Rolling Stock, 2005, 42(6): 7-11. [9] 刘卫东. 日本Linimo磁浮线的技术特点和运行情况[J]. 城市轨道交通研究,2014,17(4): 133-136.LIU Weidong. Technical characters and operation of the low-speed maglev line“linimo”in Japan[J]. Urban Mass Transit, 2014, 17(4): 133-136. [10] HAN H S, KIM D S. Magnetic Levitation[M]. Dordrecht: Springer Netherlands, 2016. [11] 佟来生. 长沙磁浮快线列车概述[J]. 电力机车与城轨车辆,2020,43(4): 1-5.TONG Laisheng. Summary of Changsha maglev express train[J]. Electric Locomotives & Mass Transit Vehicles, 2020, 43(4): 1-5. [12] 北京磁浮交通发展有限公司. 北京磁浮技术参数[DB/OL]. (2019-06-08). https://www.maglev.cn/intro/30.html [13] 马卫华,罗世辉,张敏,等. 中低速磁浮车辆研究综述[J]. 交通运输工程学报,2021,21(1): 199-216.MA Weihua, LUO Shihui, ZHANG Min, et al. Research review on medium and low speed maglev vehicle[J]. Journal of Traffic and Transportation Engineering, 2021, 21(1): 199-216. [14] 陈贵荣,龙志强. 日本低速磁悬浮列车发展[J]. 国外铁道车辆,2008,45(1): 1-3.CHEN Guirong, LONG Zhiqiang. Development of low speed maglev train in Japan[J]. Foreign Rolling Stock, 2008, 45(1): 1-3. [15] ZHANG M, LUO S H, GAO C, et al. Research on the mechanism of a newly developed levitation frame with mid-set air spring[J]. Vehicle System Dynamics, 2018, 56(12): 1797-1816. doi: 10.1080/00423114.2018.1435892 [16] 翟婉明,赵春发. 磁浮车辆/轨道系统动力学( Ⅰ ):磁/轨相互作用及稳定性[J]. 机械工程学报,2005,41(7): 1-10. doi: 10.3901/JME.2005.07.001ZHAI Wanming, ZHAO Chunfa. Dynamics of maglev vehicle/guideway systems(I): magnet/rail interaction and system stability[J]. Chinese Journal of Mechanical Engineering, 2005, 41(7): 1-10. doi: 10.3901/JME.2005.07.001 [17] 时瑾,魏庆朝. 常导磁悬浮铁路磁轨关系研究[J]. 北方交通大学学报,2004,28(4): 41-44.SHI Jin, WEI Qingchao. Studies on the magnet/rail relationship of electromagnetic suspension transport system[J]. Journal of Northern Jiaotong University, 2004, 28(4): 41-44. [18] GOTTZEIN E, LANGE B. Magnetic suspension control systems for the MBB high speed train[J]. Automatica, 1975, 11(3): 271-284. doi: 10.1016/0005-1098(75)90043-6 [19] SINHA P K. Magnetic suspension for low-speed vehicles[J]. Journal of Dynamic Systems, Measurement, and Control, 1978, 100(4): 333-342. doi: 10.1115/1.3426387 [20] BRZEZINA W, LANGERHOLC J. Lift and side forces on rectangular pole pieces in two dimensions[J]. Journal of Applied Physics, 1974, 45(4): 1869-1872. doi: 10.1063/1.1663505 [21] 赵春发,翟婉明. 低速磁浮车辆导向方式及其横向动态特性[J]. 中国铁道科学,2005,26(6): 28-32.ZHAO Chunfa, ZHAI Wanming. Guidance mode and dynamic lateral characteristics of low-speed maglev vehicle[J]. China Railway Science, 2005, 26(6): 28-32. [22] 谢云德,常文森. 电磁型磁浮列车单铁力的计算及运动稳定性和可控性研究[J]. 铁道学报,1995,17(1): 41-48.XIE Yunde, CHANG Wensen. Calculation of the force with single magnet and research of its suspension stability and controllablity on electromagneti csuspension vehicles systems[J]. Journal of the China Railway Society, 1995, 17(1): 41-48. [23] YAMAMURA S, ITO T. Analysis of speed characteristics of attracting magnet for magnetic levitation of vehicles[J]. IEEE Transactions on Magnetics, 1975, 11(5): 1504-1507. doi: 10.1109/TMAG.1975.1058850 [24] ONUKI T, WAKAO S, YOSHIZAWA T. Eddy current computations in moving conductors by the hybrid FE-BE method[J]. IEEE Transactions on Magnetics, 1995, 31(3): 1436-1439. doi: 10.1109/20.376298 [25] ONUKI T, NAKATSU T, WAKAO S, et al. Magnetic field analysis of nonlinear system considering both motion and voltage equations[J]. IEEE Transactions on Magnetics, 1997, 33(2): 2097-2100. doi: 10.1109/20.582734 [26] 李云钢,常文森. 模块结构EMS型磁浮列车的导向控制研究[J]. 国防科技大学学报,1997,19(3): 114-118.LI Yungang, CHANG Wensen. Guidance control research of module structure EMS maglev vehicle[J]. Journal of National University of Defense Technology, 1997, 19(3): 114-118. [27] ZHAO C F, ZHAI W M. D603 dynamic characteristics of a single magnet suspension system applied to a low-speed EMS maglev vehicle[C]//STECH 2003: Proceeding of the International Symposium on Speed-up and Service Technology for Railway and Maglev System. Tokyo: The Japan Society of Mechanical Engineers, 2003: 472-477. [28] 洪华杰,李杰. 磁浮系统模型中用弹簧阻尼器替代控制器的等效性分析[J]. 国防科技大学学报,2005,27(4): 101-105.HONG Huajie, LI Jie. The analysis of the equivalence of substituting the controllers with the spring-dampers in maglev system model[J]. Journal of National University of Defense Technology, 2005, 27(4): 101-105. [29] 梁鑫,罗世辉,马卫华. 常导磁浮列车动态磁轨关系研究[J]. 铁道学报,2013,35(9): 39-45.LIANG Xin, LUO Shihui, MA Weihua. Study on dynamic magnet-track relationship of maglev vehicles[J]. Journal of the China Railway Society, 2013, 35(9): 39-45. [30] 梁鑫,马卫华. 2种磁轨关系的磁浮车桥相互作用比较分析[J]. 铁道科学与工程学报,2017,14(4): 845-851.LIANG Xin, MA Weihua. Comparative analysis of two kinds of magnet-track relationship of maglev vehicle and guideway interaction[J]. Journal of Railway Science and Engineering, 2017, 14(4): 845-851. [31] 赵志苏,尹力明,罗昆. 磁悬浮列车转向机构运动分析与设计[J]. 机车电传动,2000(6): 11-13,30.ZHAO Zhisu, YIN Liming, LUO Kun. Motion analysis and design for yawing mechanism of maglev vehicle[J]. Electric Drive for Locomotive, 2000(6): 11-13,30. [32] ZHAO Z S. Structural and kinematic analysis of EMS maglev train[M]. London: INTECH Open Access Publisher, 2012: 116-119. [33] HU J X, MA W H, LUO S H, et al. Decoupling capability of levitation frames for medium-low speed maglev trains[J]. International Journal of Structural Stability and Dynamics, 2021, 21(12): 2150178.1-2150178.21. doi: 10.1142/S0219455421501789 [34] 胡俊雄,雷成,马卫华,等. 中低速磁浮列车中置式悬浮架的耦合姿态分析[J]. 铁道学报,2021,43(10): 29-35.HU Junxiong, LEI Cheng, MA Weihua, et al. Coupling posture analysis of mid-set levitation frame of medium and low speed maglev train[J]. Journal of the China Railway Society, 2021, 43(10): 29-35. [35] 张耿,李杰,李金辉. 低速磁浮列车防侧滚吊杆运动学研究[J]. 铁道学报,2012,34(4): 28-33.ZHANG Geng, LI Jie, LI Jinhui. Kinematics study on anti-roll boom of low-speed maglev train[J]. Journal of the China Railway Society, 2012, 34(4): 28-33. [36] LENG P, LI J, JIN Y X. Kinematics modeling and analysis of mid-low speed maglev vehicle with screw and product of exponential theory[J]. Symmetry, 2019, 11(10): 1201.1-1201.16. doi: 10.3390/sym11101201 [37] 刘德生,李杰,常文森. EMS型磁浮列车模块的运动耦合研究[J]. 铁道学报,2006,28(3): 22-26.LIU Desheng, LI Jie, CHANG Wensen. Study on motional coupling of single EMS module[J]. Journal of the China Railway Society, 2006, 28(3): 22-26. [38] 蒋启龙,连级三,岳德坤. 磁浮列车模块的机械耦合分析[J]. 铁道学报,2005,27(1): 36-39.JIANG Qilong, LIAN Jisan, YUE Dekun. Mechanical coupling analysis of single EMS module[J]. Journal of the China Railway Society, 2005, 27(1): 36-39. [39] ZHANG W Q, LI J, ZHANG K, et al. Decoupling suspension controller based on magnetic flux feedback[J]. Advanced Materials Research, 2013, 709: 462-469. doi: 10.4028/www.scientific.net/AMR.709.462 [40] HE G, LI J, CUI P. Decoupling control design for the module suspension control system in maglev train[J]. Mathematical Problems in Engineering, 2015, 2015: 865650.1-865650.15. [41] LENG P, LI Y J, ZHOU D F, et al. Decoupling control of maglev train based on feedback linearization[J]. IEEE Access, 2019, 7: 130352-130362. doi: 10.1109/ACCESS.2019.2940053 [42] 翟婉明,赵春发. 现代轨道交通工程科技前沿与挑战[J]. 西南交通大学学报,2016,51(2): 209-226. doi: 10.3969/j.issn.0258-2724.2016.02.001ZHAI Wanming, ZHAO Chunfa. Frontiers and challenges of sciences and technologies in modern railway engineering[J]. Journal of Southwest Jiaotong University, 2016, 51(2): 209-226. doi: 10.3969/j.issn.0258-2724.2016.02.001 [43] POPP K, SCHIEHLEN W. Dynamics of magnetically levitated vehicles on flexible guideways[J]. Vehicle System Dynamics, 1975, 4(2/3): 195-199. [44] POPP K. Math ematical modeling and control system design of maglev vehicles[M]. Vienna: Springer, 1982. [45] 赵春发,翟婉明,蔡成标. 磁浮车辆/高架桥垂向耦合动力学研究[J]. 铁道学报,2001,23(5): 27-33.ZHAO Chunfa, ZHAI Wanming, CAI Chengbiao. Maglev vehicle/elevated-beam guideway vertical coupling dynamics[J]. Journal of the China Railway Society, 2001, 23(5): 27-33. [46] KORTÜM W. Introduction to system-dynamics of ground vehicles[J]. Vehicle System Dynamics, 1987, 16(S1): 1-36. doi: 10.1080/00423118708969170 [47] ZHENG X J, WU J J, ZHOU Y H. Numerical analyses on dynamic control of five-degree-of-freedom maglev vehicle moving on flexible guideways[J]. Journal of Sound and Vibration, 2000, 235(1): 43-61. doi: 10.1006/jsvi.1999.2911 [48] 曾佑文,王少华,张昆仑. EMS磁浮列车-轨道垂向耦合动力学研究[J]. 铁道学报,1999,21(2): 21-25. doi: 10.3321/j.issn:1001-8360.1999.02.005ZENG Youwen, WANG Shaohua, ZHANG Kunlun. A study of vertical coupling dynamics of EMS maglev train and guideway systems[J]. Journal of the China Railway Society, 1999, 21(2): 21-25. doi: 10.3321/j.issn:1001-8360.1999.02.005 [49] 曾佑文,王少华,张昆仑. 磁浮列车车辆 轨道耦合振动及悬挂参数研究[J]. 西南交通大学学报,1999,34(2): 168-173.ZENG Youwen, WANG Shaohua, ZHANG Kunlun. A study on the vehicle guideway coupling vibration and suspension parameters of maglev train[J]. Journal of Southwest Jiaotong University, 1999, 34(2): 168-173. [50] ZHAI Wanming, ZHAO Chunfa, CAI Chengbiao. Dynamic simulation of the EMS maglev vehicle-guideway-controller coupling system[C]//Proceedings of the 18th international conference on magnetically levitated systems and linear drives (MAGLEV 2004). Shanghai: Railway Technical Research Institute, 2004: 567-574. [51] MIN D J, JUNG M R, KIM M Y, et al. Dynamic interaction analysis of maglev-guideway system based on a 3D full vehicle model[J]. International Journal of Structural Stability and Dynamics, 2017, 17(1): 1750006.1-1750006.39. doi: 10.1142/S0219455417500067 [52] HAN J B, HAN H S, KIM S S, et al. Design and validation of a slender guideway for maglev vehicle by simulation and experiment[J]. Vehicle System Dynamics, 2016, 54(3): 370-385. doi: 10.1080/00423114.2015.1137957 [53] HAN J B, HAN H S, LEE J M, et al. Dynamic modeling and simulation of EMS Maglev vehicle to evaluate the levitation stability and operational safety over an elastic segmented switch track[J]. Journal of Mechanical Science and Technology, 2018, 32(7): 2987-2998. doi: 10.1007/s12206-018-0602-1 [54] HU J X, MA W H, LUO S H. Coupled dynamic analysis of low and medium speed maglev vehicle-bridge interaction using SIMPACK[J]. Proceedings of the Institution of Mechanical Engineers, Part F: Journal of Rail and Rapid Transit, 2021, 235(3): 377-389. doi: 10.1177/0954409720925676 [55] 德米特里·波戈列洛夫,雷强,根纳季·米克希夫,等. 基于UM的磁浮列车-轨道梁耦合振动仿真程序开发[J]. 计算机辅助工程,2019,28(1): 28-35. [56] HOSODA Y, KAWASHIMA M, IWAYA M, et al. Curvature running test results of HSST vehicle[J]. IEEE Transactions on Magnetics, 1987, 23(5): 2344-2346. doi: 10.1109/TMAG.1987.1065314 [57] 卜继玲,傅茂海,严隽耄,等. 常导吸引式低速磁悬浮车辆动态曲线通过性能研究[J]. 铁道学报,2001,23(1): 29-32.BU Jiling, FU Maohai, YAN Junmao, et al. Study on dynamic performance of the Low-speed EMS maglev car in curve negotiation[J]. Journal of the China Railway Society, 2001, 23(1): 29-32. [58] ZHAO C F, ZHAI W, WANG K Y. Dynamic responses of the low-speed maglev vehicle on the curved guideway[J]. Vehicle System Dynamics, 2002, 38(3): 185-210. doi: 10.1076/vesd.38.3.185.8289 [59] 叶学艳,赵春发,翟婉明. 低速磁浮车辆动力学建模与导向机构仿真分析[J]. 交通运输工程学报,2007,7(3): 6-10.YE Xueyan, ZHAO Chunfa, ZHAI Wanming. Dynamics modeling of low-speed maglev vehicle system and simulation of its guidance mechanisms[J]. Journal of Traffic and Transportation Engineering, 2007, 7(3): 6-10. [60] YIM B H, HAN H S, LEE J K, et al. Curving performance simulation of an EMS-type maglev vehicle[J]. Vehicle System Dynamics, 2009, 47(10): 1287-1304. doi: 10.1080/00423110802632071 [61] 杨磊,赵志苏. 磁悬浮列车转向架结构强度的有限元分析[J]. 机械,2004,31(2): 13-15,30. doi: 10.3969/j.issn.1006-0316.2004.02.005YANG Lei, ZHAO Zhisu. The finite element analysis on structure strength of the maglev bogie[J]. Machinery, 2004, 31(2): 13-15,30. doi: 10.3969/j.issn.1006-0316.2004.02.005 [62] 周益,刘放,李飞,等. 运用SolidWorks和ANSYS的磁浮列车悬浮架结构有限元分析[J]. 现代制造工程,2012(8): 17-20.ZHOU Yi, LIU Fang, LI Fei, et al. Finite element analysis of the levitation chassis of maglev vehicle based on SolidWorks and ANSYS[J]. Modern Manufacturing Engineering, 2012(8): 17-20. [63] 马军,孙秦. 磁悬浮列车走行机构关键部件DFR法疲劳寿命估算[J]. 机械设计与制造,2008(6): 38-40.MA Jun, SUN Qin. Fatigue life estimation of the key part of the maglev running frame based on DFR method[J]. Machinery Design & Manufacture, 2008(6): 38-40. [64] 任治军,赵志苏. 磁悬浮列车转向架疲劳寿命功率谱预测法[J]. 机电工程技术,2006,35(1): 25-27,66,101. doi: 10.3969/j.issn.1009-9492.2006.01.010REN Zhijun, ZHAO Zhisu. Fatigue life prediction of maglev bogie by power spectrum method[J]. Mechanical & Electrical Engineering Technology, 2006, 35(1): 25-27,66,101. doi: 10.3969/j.issn.1009-9492.2006.01.010 [65] 迟振华,刘放,赵兴忠,等. 基于表面外推热点应力法的悬浮架疲劳强度分析[J]. 现代制造工程,2015(10): 8-11,26. doi: 10.3969/j.issn.1671-3133.2015.10.003CHI Zhenhua, LIU Fang, ZHAO Xingzhong, et al. Research on fatigue analysis of levitation chassis using hot spot stress method based on surface extrapolation[J]. Modern Manufacturing Engineering, 2015(10): 8-11,26. doi: 10.3969/j.issn.1671-3133.2015.10.003 [66] 李强,姚毓瑾,虞大联,等. 高速磁悬浮列车悬浮架结构可靠性研究[J]. 北京交通大学学报,2020,44(1): 70-76. doi: 10.11860/j.issn.1673-0291.20190019LI Qiang, YAO Yujin, YU Dalian, et al. Structural reliability analysis of levitation chassis of high-speed maglev[J]. Journal of Beijing Jiaotong University, 2020, 44(1): 70-76. doi: 10.11860/j.issn.1673-0291.20190019 [67] HAN S W, WOO K J. Evaluation of dynamic fatigue life for maglev bogie frame[J]. Journal of the Korean Society for Railway, 2010, 13(1): 1-8. [68] HAN J W, KIM H S, BANG J S, et al. Fatigue strength evaluation of bogie frame of urban maglev train[J]. Transactions of the Korean Society of Mechanical Engineers A, 2013, 37(7): 945-951. doi: 10.3795/KSME-A.2013.37.7.945 [69] HAN J W, KIM J D, SONG S Y. Fatigue strength evaluation of a bogie frame for urban maglev train with fatigue test on full-scale test rig[J]. Engineering Failure Analysis, 2013, 31: 412-420. doi: 10.1016/j.engfailanal.2013.01.009 [70] 龙志强,张志洲,常文森. 考虑传感器故障的磁浮系统容错控制仿真研究[J]. 系统仿真学报,2007,19(19): 4469-4472.LONG Zhiqiang, ZHANG Zhizhou, CHANG Wensen. Simulation research of fault tolerant control for maglev system with sensor's faults[J]. Journal of System Simulation, 2007, 19(19): 4469-4472. [71] YETENDJE A, SERON M M, DE DONÁ J A, et al. Sensor fault-tolerant control of a magnetic levitation system[J]. International Journal of Robust and Nonlinear Control, 2010, 20(18): 2108-2121. doi: 10.1002/rnc.1572 [72] SUNG H K, KIM D S, CHO H J, et al. Fault tolerant control of electromagnetic levitation system[J]. Advances in Industrial Control, 2004, 57(10): 676-689. [73] JANG K H, KOOK Y S, SHIN B C, et al. Redundancy performance of levitation controller for maglev vehicle EcoBee[C]//2018 21st International Conference on Electrical Machines and Systems (ICEMS). Jeju: IEEE, 2018: 898-902. [74] 赵志苏. 基于空气悬架系统的磁悬浮列车安全冗余研究[J]. 液压与气动,2008(1): 18-21. doi: 10.3969/j.issn.1000-4858.2008.01.007ZHAO Zhisu. Safety redundancy research of MAGLEV based on air suspension system[J]. Chinese Hydraulics & Pneumatics, 2008(1): 18-21. doi: 10.3969/j.issn.1000-4858.2008.01.007 [75] 向湘林, 龙志强, 梁潇, 等. 中低速磁悬浮列车、走行部及用于提高冗余的搭接结构: CN208452798U[P]. 2019-02-01. -

 下载:
下载:





 点击查看大图
点击查看大图
计量
- 文章访问数: 2498
- HTML全文浏览量: 1442
- PDF下载量: 251
- 被引次数: 0