- ISSN 0258-2724
- CN 51-1277/U
- EI Compendex
- Scopus
- Indexed by Core Journals of China, Chinese S&T Journal Citation Reports
- Chinese S&T Journal Citation Reports
- Chinese Science Citation Database

| Citation: | LI Cuiran, YANG Qian, XIE Jianli, LYU Anqi. Throughput Performance Analysis and Optimization of Energy Harvesting Wireless Sensor Network Based on Simultaneous Wireless Information and Power Transfer[J]. Journal of Southwest Jiaotong University, 2024, 59(5): 1014-1022. doi: 10.3969/j.issn.0258-2724.20220625

|
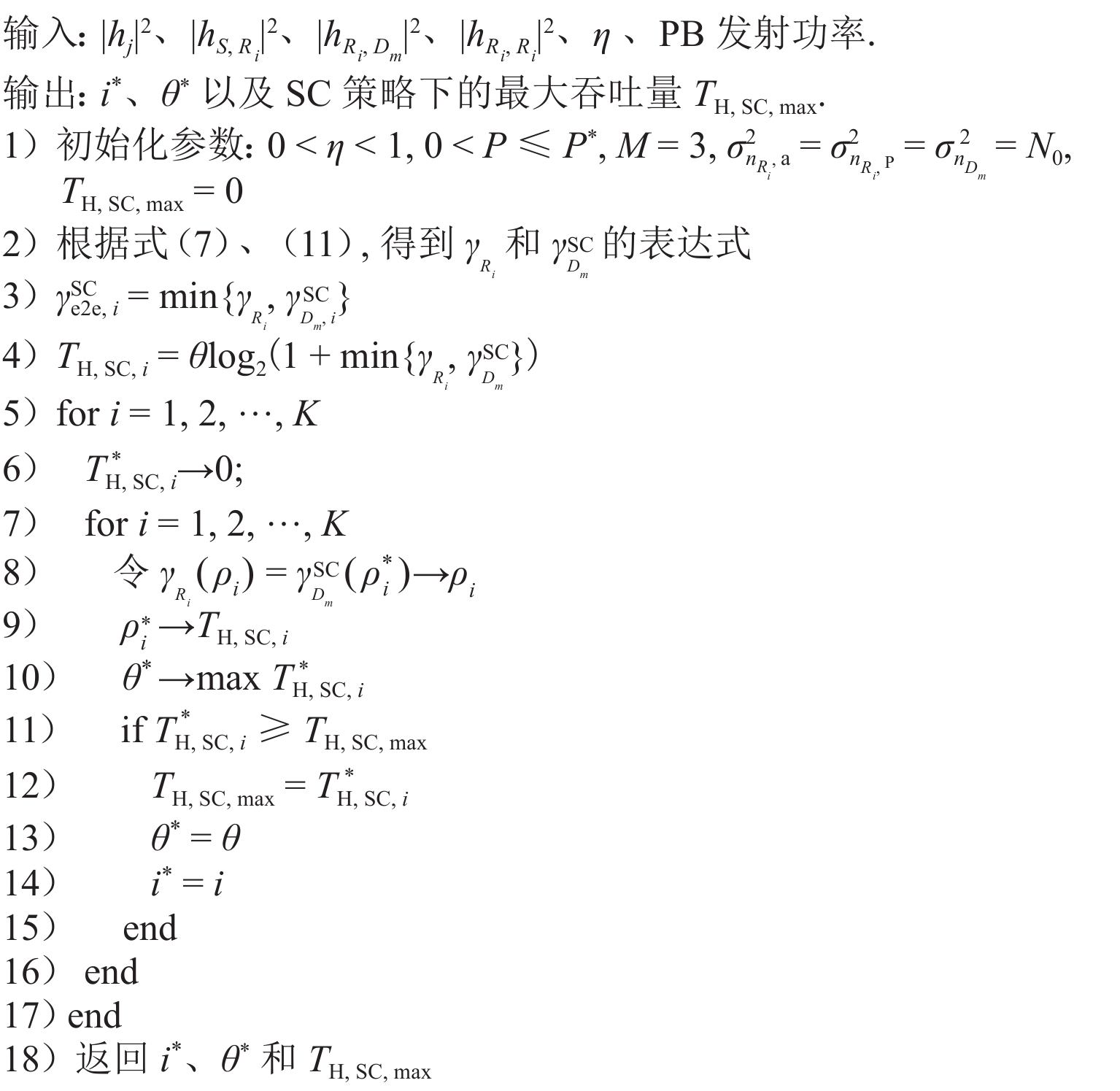
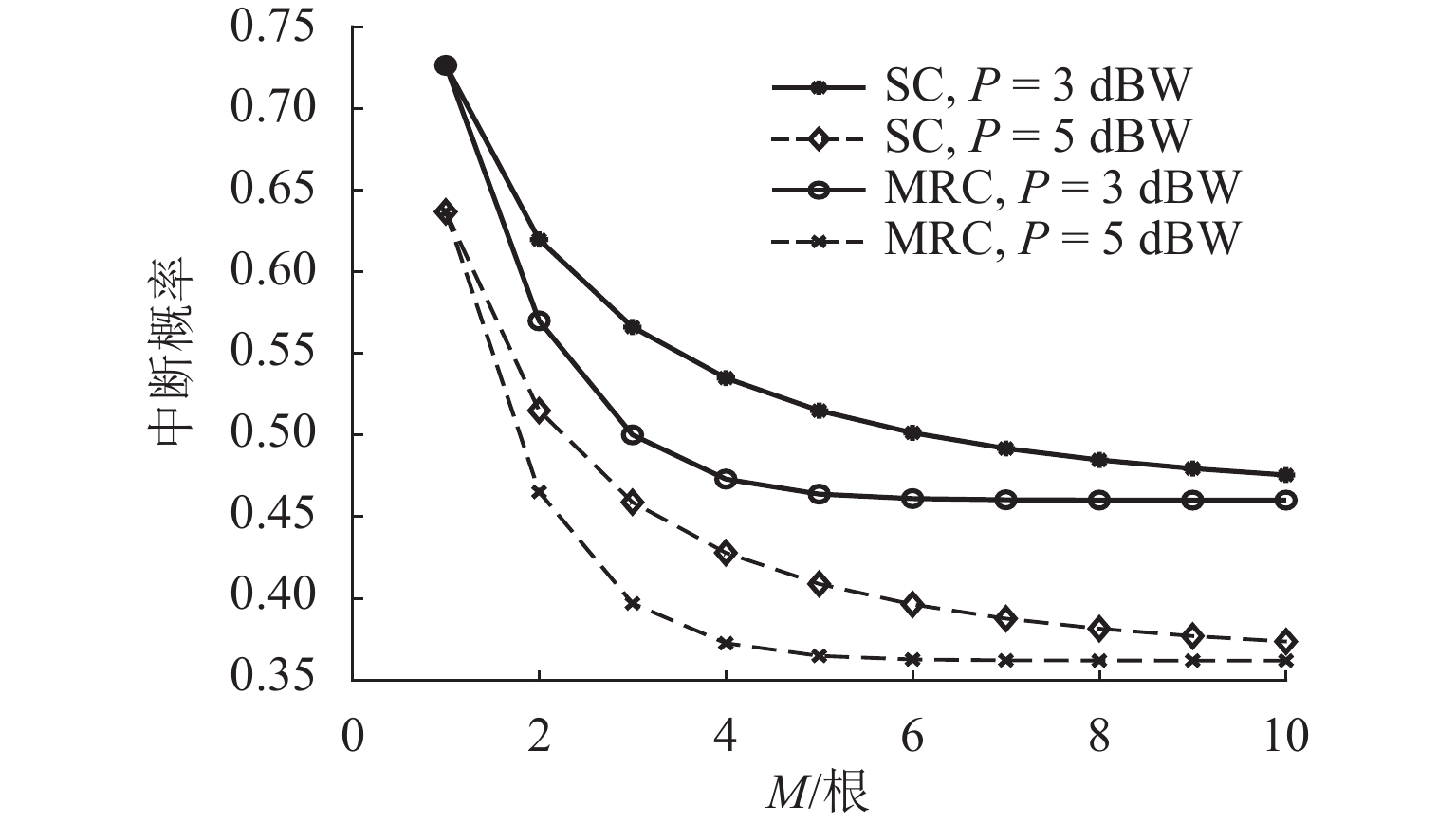
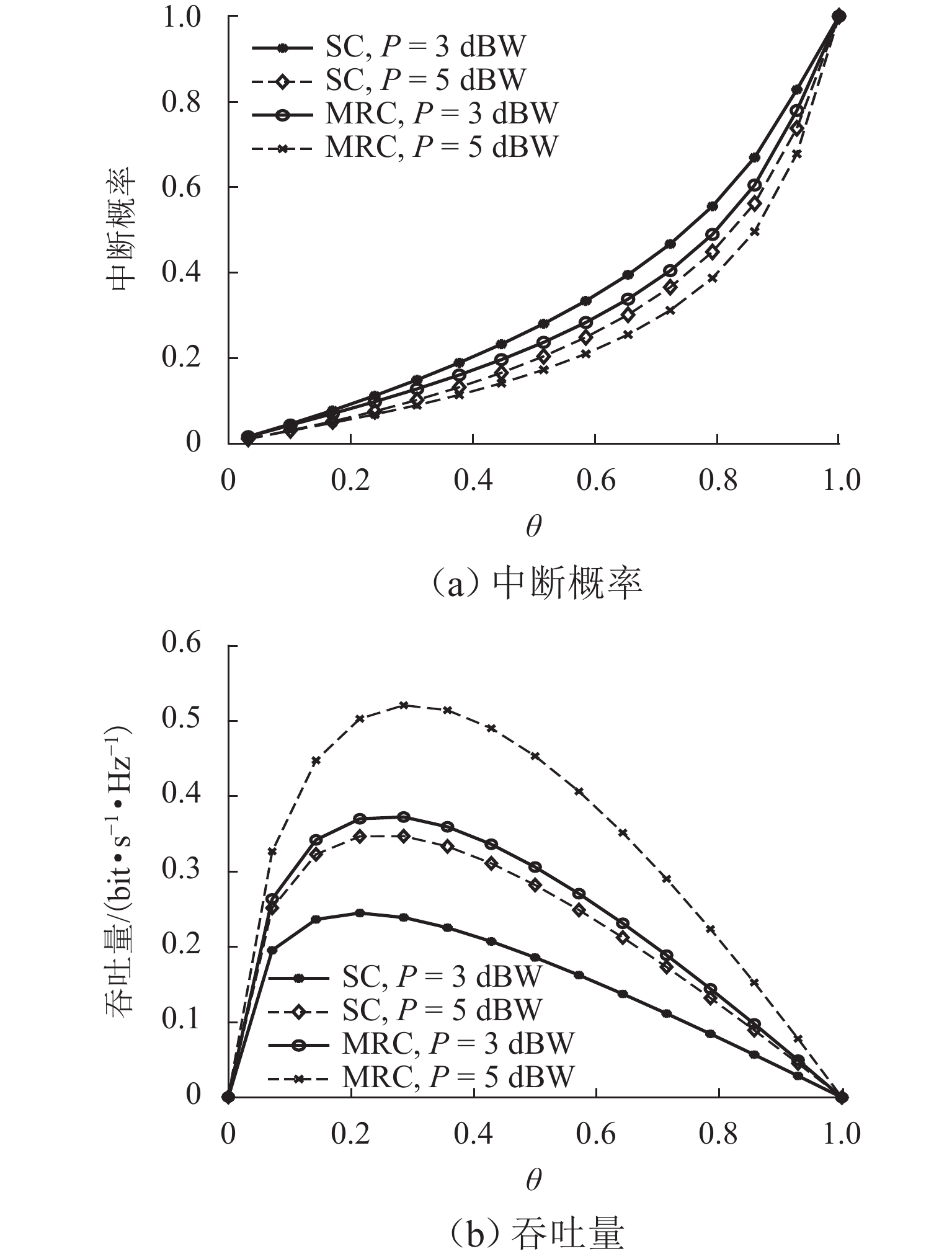
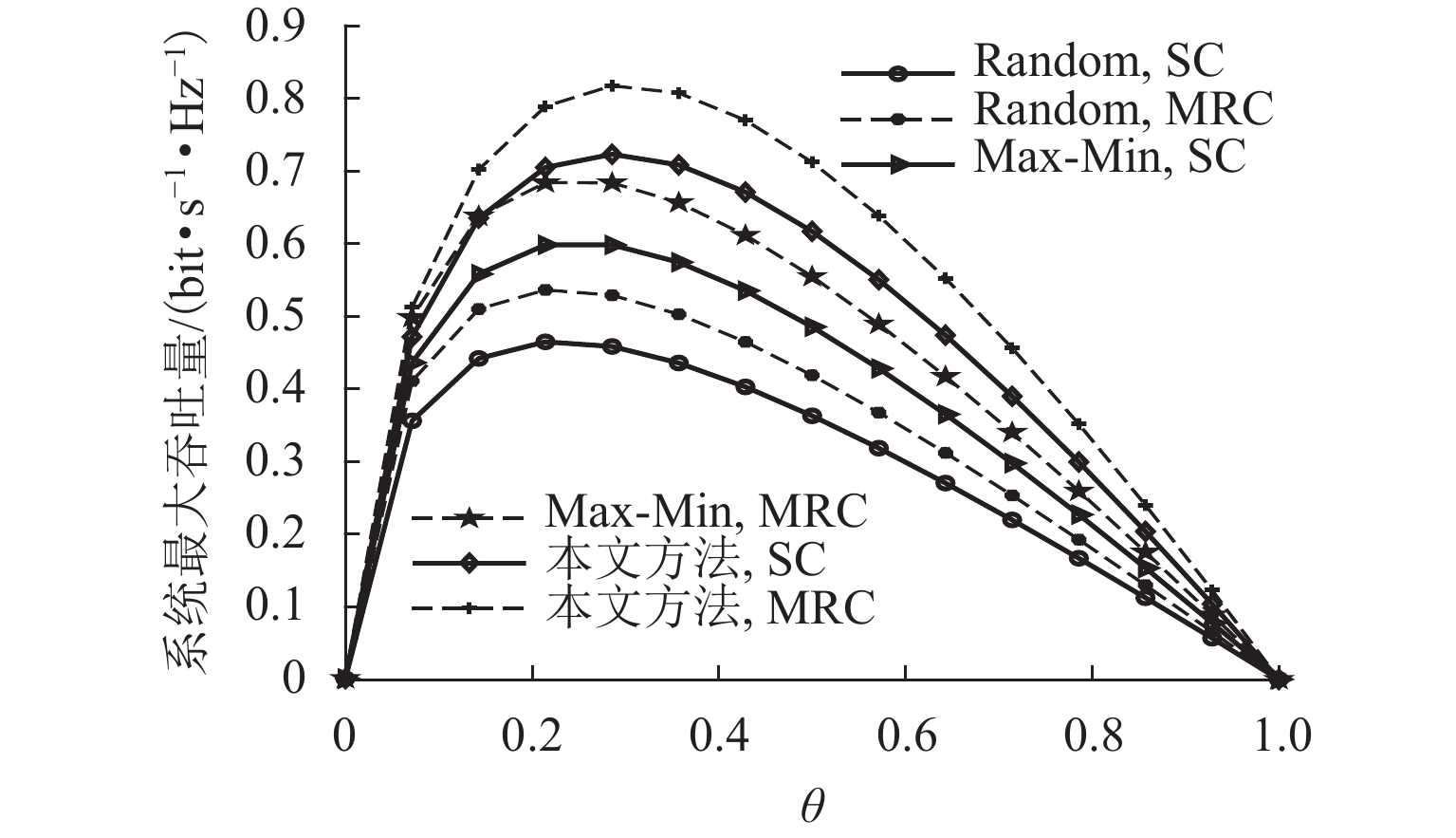
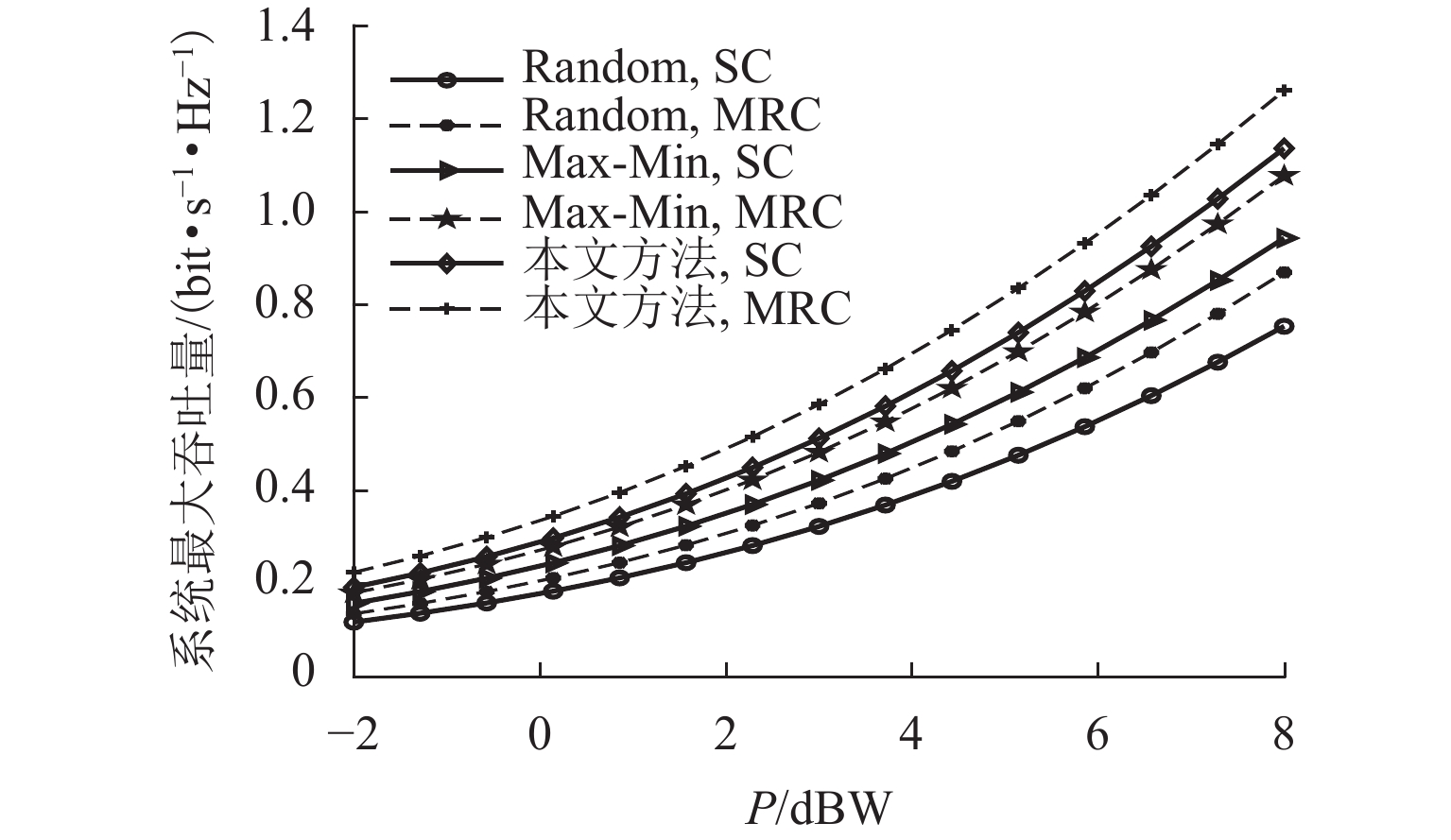
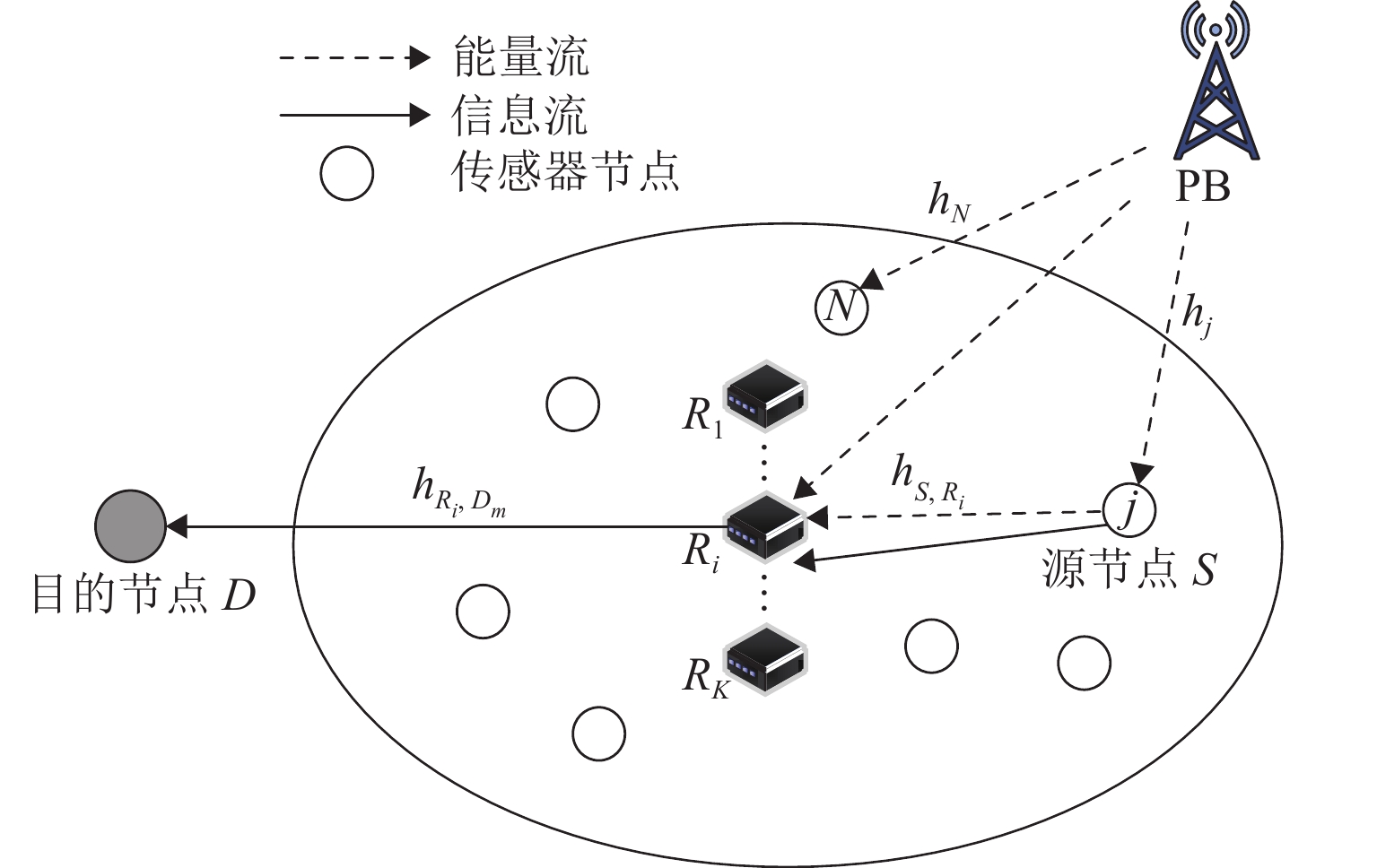
In view of two-hop multi-relay transmission in energy harvesting wireless sensor networks (WSN), a wireless radio frequency power beacon (PB)-assisted energy harvesting relay model based on simultaneous wireless information and power transfer (SWIPT) was constructed. Under the condition that the relay node has the characteristics of capturing the source node, loop self interference, and PB signal energy, the outage probability and throughput of the destination node using two different receiving strategies, namely, selection combining (SC) and maximal ratio combining (MRC), were derived. Then, under multiple constraints such as ensuring communication quality of service (QoS), a relay selection algorithm was proposed to jointly optimize the time switching factor and power splitting factor with the goal of maximizing the throughput. Simulation and numerical results show that the PB transmit power, time switching factor, number of antennas, and power splitting factor significantly affect the system’s outage probability and throughput. When PB transmit power is 6 dBW, and the number of antennas is 3, compared with the random relay selection algorithm and the max-min relay selection algorithm, the system’s throughput gains under the SC strategy are 0.29 and 0.15 bit/(s·Hz), respectively, and those under the MRC strategy are 0.32 and 0.16 bit/(s·Hz), respectively.

| [1] |
SUDEVALAYAM S, KULKARNI P. Energy harvesting sensor nodes: survey and implications[J]. IEEE Communications Surveys & Tutorials, 2011, 13(3): 443-461.
|
| [2] |
SISINNI E, SAIFULLAH A, HAN S, et al. Industrial Internet of Things: challenges, opportunities, and directions[J]. IEEE Transactions on Industrial Informatics, 2018, 14(11): 4724-4734. doi: 10.1109/TII.2018.2852491
|
| [3] |
王茜竹,胡洪瑞,徐勇军,等. 基于能量收集的UAV-D2D网络资源分配算法[J]. 电子与信息学报,2022,44(3): 976-986.
WANG Qianzhu, HU Hongrui, XU Yongjun, et al. Resource allocation for UAV-assisted D2D communications with energy harvesting[J]. Journal of Electronics & Information Technology, 2022, 44(3): 976-986.
|
| [4] |
刘向丽,刘冬妮,李海娇,等. 能量协作下中继系统性能推导及仿真分析[J]. 西安电子科技大学学报,2019,46(5): 91-97.
LIU Xiangli, LIU Dongni, LI Haijiao, et al. Derivation of the performance of the relay system and simulation analysis of the system under energy cooperation[J]. Journal of Xidian University, 2019, 46(5): 91-97.
|
| [5] |
HUANG K B, LAU V K N. Enabling wireless power transfer in cellular networks: architecture, modeling and deployment[J]. IEEE Transactions on Wireless Communications, 2014, 13(2): 902-912. doi: 10.1109/TWC.2013.122313.130727
|
| [6] |
JIA X H, ZHANG C Z, KANG J M, et al. Joint beamforming design and time allocation for wireless powered asymmetric two-way multirelay network[J]. IEEE Transactions on Vehicular Technology, 2018, 67(10): 9641-9655. doi: 10.1109/TVT.2018.2860001
|
| [7] |
LIU H W, KIM K J, KWAK K S, et al. Power splitting-based SWIPT with decode-and-forward full-duplex relaying[J]. IEEE Transactions on Wireless Communications, 2016, 15(11): 7561-7577. doi: 10.1109/TWC.2016.2604801
|
| [8] |
ZHANG R, HO C K. MIMO broadcasting for simultaneous wireless information and power transfer[J]. IEEE Transactions on Wireless Communications, 2013, 12(5): 1989-2001. doi: 10.1109/TWC.2013.031813.120224
|
| [9] |
施安妮,李陶深,王哲,等. 无线携能通信系统中的吞吐量最优化全双工中继选择策略[J]. 小型微型计算机系统,2021,42(9): 1906-1912.
SHI Anni, LI Taoshen, WANG Zhe, et al. Optimization scheme for the SWIPT-NOMA opportunity cooperative system[J]. Journal of Chinese Computer Systems, 2021, 42(9): 1906-1912.
|
| [10] |
TRAN TIN P, VAN-DUC P, NGUYEN T N, et al. Performance analysis in the decode-and-forward full-duplex relaying network with SWIPT[J]. The Scientific World Journal, 2021, 2021: 1-8.
|
| [11] |
TIN P T, NGUYEN T N, TRAN D H, et al. Performance enhancement for full-duplex relaying with time-switching-based SWIPT in wireless sensors networks[J]. Sensors, 2021, 21(11): 3847.1-3847.16.
|
| [12] |
WANG D X, ZHANG R Q, CHENG X, et al. Relay selection in full-duplex energy-harvesting two-way relay networks[J]. IEEE Transactions on Green Communications and Networking, 2017, 1(2): 182-191. doi: 10.1109/TGCN.2017.2686325
|
| [13] |
JING Y D, JAFARKHANI H. Single and multiple relay selection schemes and their achievable diversity orders[J]. IEEE Transactions on Wireless Communications, 2009, 8(3): 1414-1423. doi: 10.1109/TWC.2008.080109
|
| [14] |
李陶深,施安妮,王哲,等. 基于SWIPT的吞吐量最优化NOMA全双工中继选择策略[J]. 通信学报,2021,42(5): 87-97.
LI Taoshen, SHI Anni, WANG Zhe, et al. Optimal relay selection for full duplex SWIPT-NOMA systems with maximal throughput[J]. Journal on Communications, 2021, 42(5): 87-97.
|
| [15] |
WANG Z H, CHEN Z Y, XIA B, et al. Cognitive relay networks with energy harvesting and information transfer: design, analysis, and optimization[J]. IEEE Transactions on Wireless Communications, 2016, 15(4): 2562-2576. doi: 10.1109/TWC.2015.2504581
|
| [16] |
罗轶,孔静恬,董健,等. 能量收集认知多跳中继网络中断性能分析及优化[J]. 电子与信息学报,2021,43(10): 2920-2927.
LUO Yi, KONG Jingtian, DONG Jian, et al. Outage performance analysis and optimization of energy harvesting cognitive multihop relay networks[J]. Journal of Electronics & Information Technology, 2021, 43(10): 2920-2927.
|
| [17] |
HU Z W, YUAN C W, ZHU F C, et al. Weighted sum transmit power minimization for full-duplex system with SWIPT and self-energy recycling[J]. IEEE Access, 2016, 4: 4874-4881. doi: 10.1109/ACCESS.2016.2593914
|
| [18] |
NGUYEN T N, MINH T H Q, TRAN P T, et al. Adaptive energy harvesting relaying protocol for two-way half-duplex system network over rician fading channels[J]. Wireless Communications and Mobile Computing, 2018, 2018: 1-10.
|
| [19] |
GRADSHTEYN I S, RYZHIK I M, JEFFREY A, et al. Table of integrals, series, and products[M]. 7th ed. San Diego: Academic Press, 2007: 366-369.
|
| [20] |
CHONG E K P, ŻAK S H. An introduction to optimization[M]. Hoboken: Wiley, 2008.
|
| [21] |
WANG D X, ZHANG R Q, CHENG X, et al. Full-duplex energy-harvesting relay networks: capacity-maximizing relay selection[J]. Journal of Communications and Information Networks, 2018, 3(3): 79-85. doi: 10.1007/s41650-018-0027-0
|
| [22] |
高云波,程璇,李翠然,等. T2T和T2G混合网络中的功率分配算法[J]. 西南交通大学学报,2023,58(5): 1126-1134,1179.
GAO Yunbo, CHENG Xuan, LI Cuiran, et al. Power allocation algorithm in T2T and T2G hybrid network[J]. Journal of Southwest Jiaotong University, 2023, 58(5): 1126-1134,1179.
|
| [23] |
TRAN TIN P, THE HUNG D, NGUYEN T, et al. Secrecy performance enhancement for underlay cognitive radio networks employing cooperative multi-hop transmission with and without presence of hardware impairments[J]. Entropy, 2019, 21(2): 217.1-217.16.
|
Figures(9)


 DownLoad:
DownLoad: