- ISSN 0258-2724
- CN 51-1277/U
- EI Compendex
- Scopus
- Indexed by Core Journals of China, Chinese S&T Journal Citation Reports
- Chinese S&T Journal Citation Reports
- Chinese Science Citation Database

| Citation: | LI Chunguang, MAO Yu, YAN Hubin, LIANG Aihong, HAN Yan. Experimental Study on Vortex-Induced Vibration Performance and Countermeasures for Side Girder Beam with Conveyer[J]. Journal of Southwest Jiaotong University, 2022, 57(4): 886-893. doi: 10.3969/j.issn.0258-2724.20210224

|
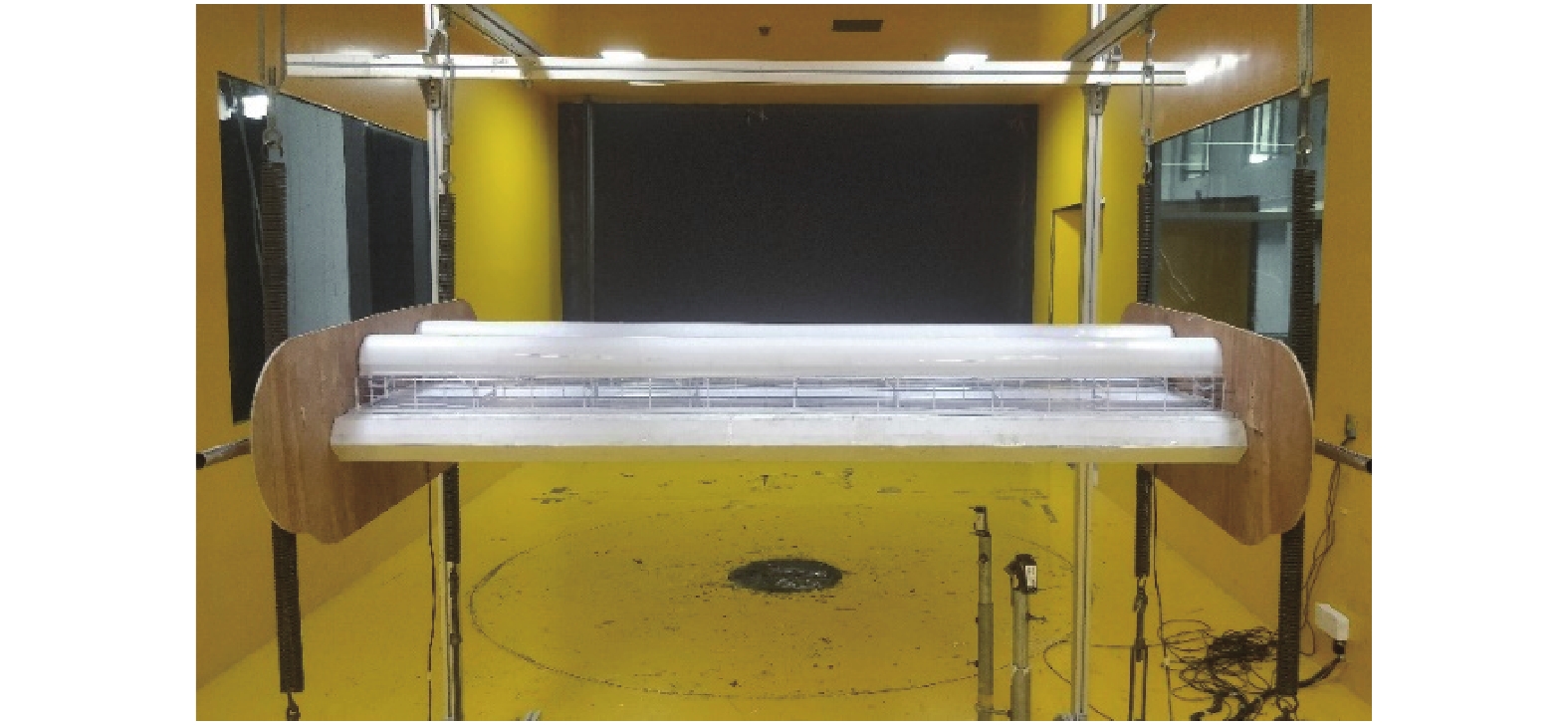
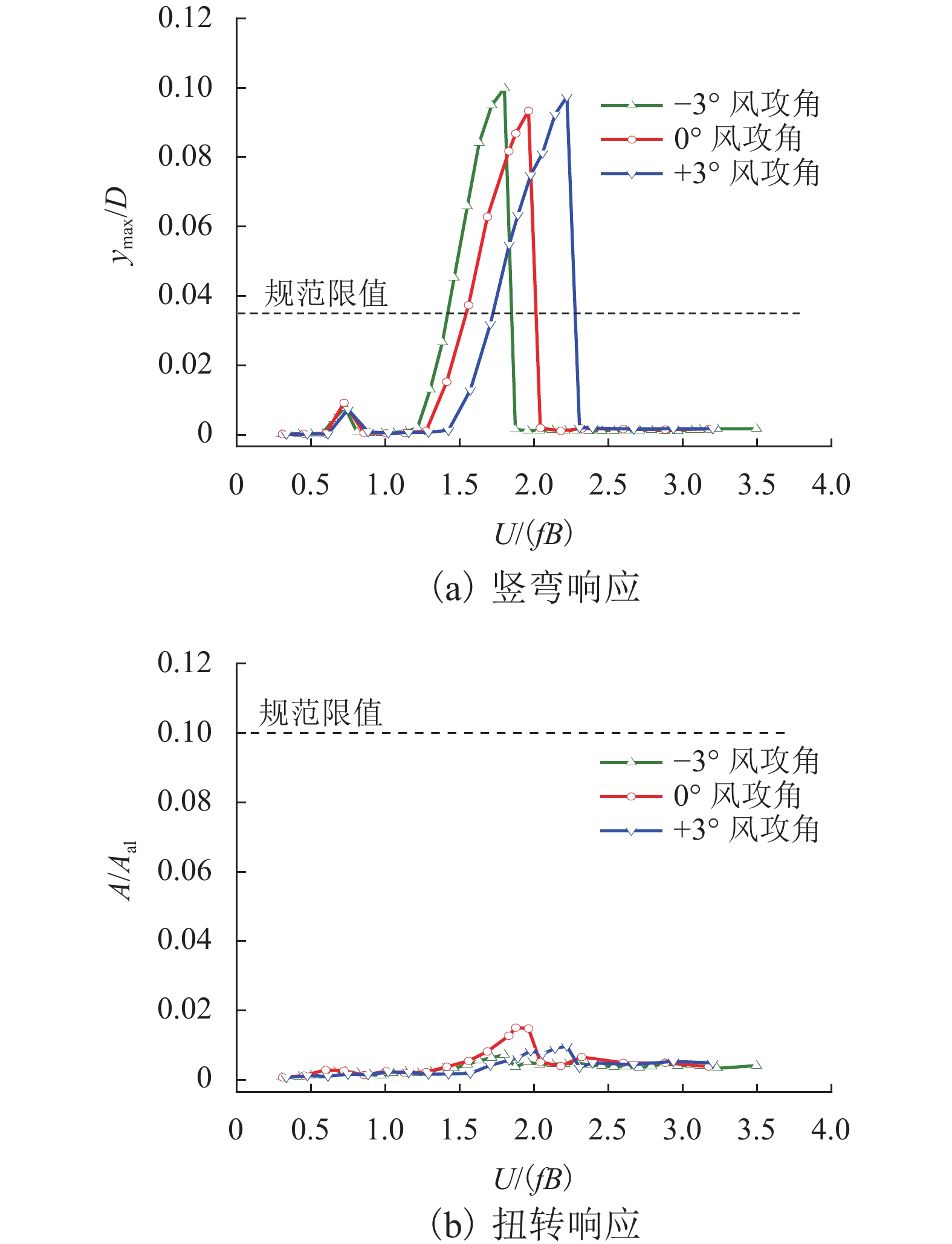
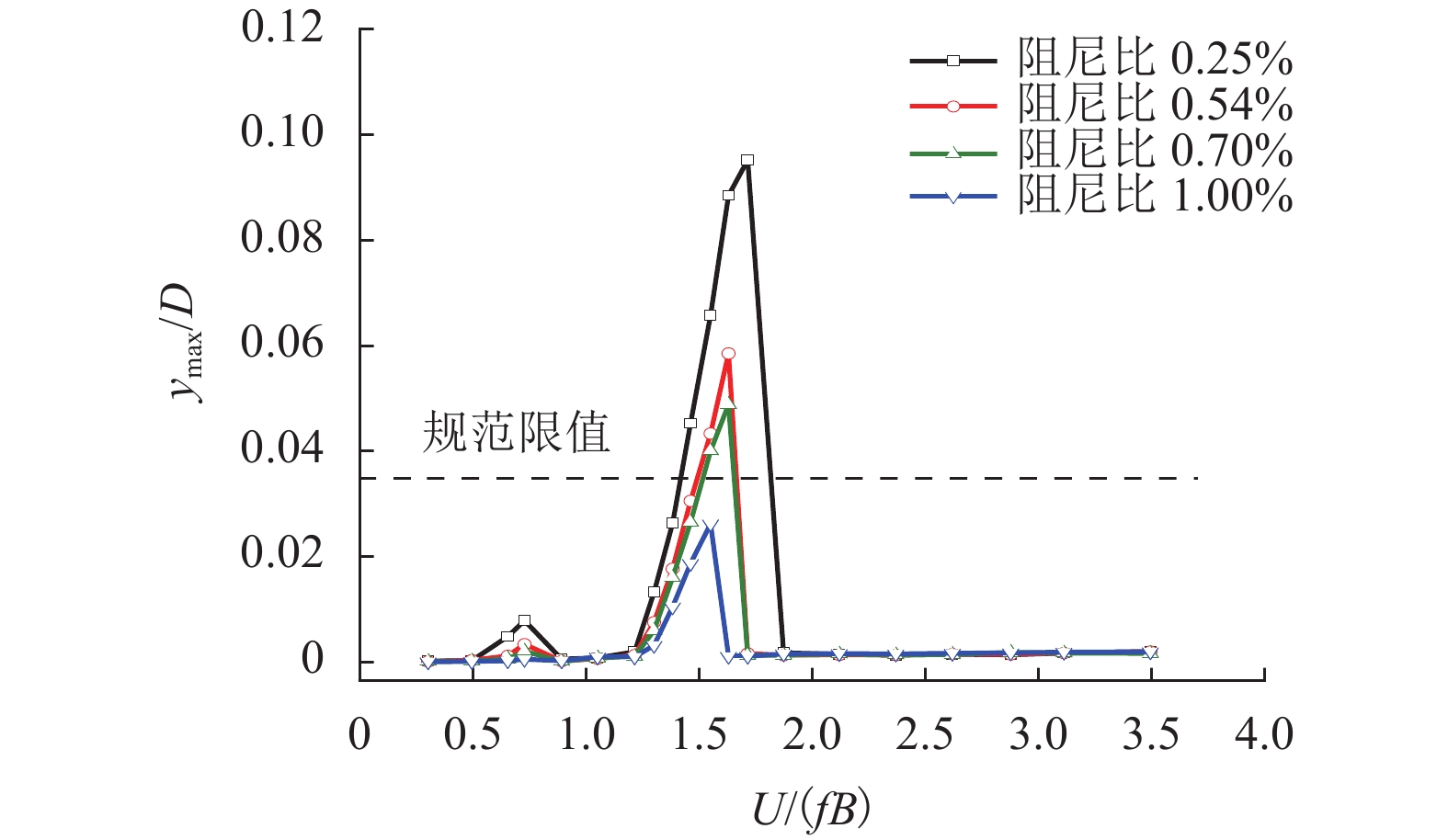
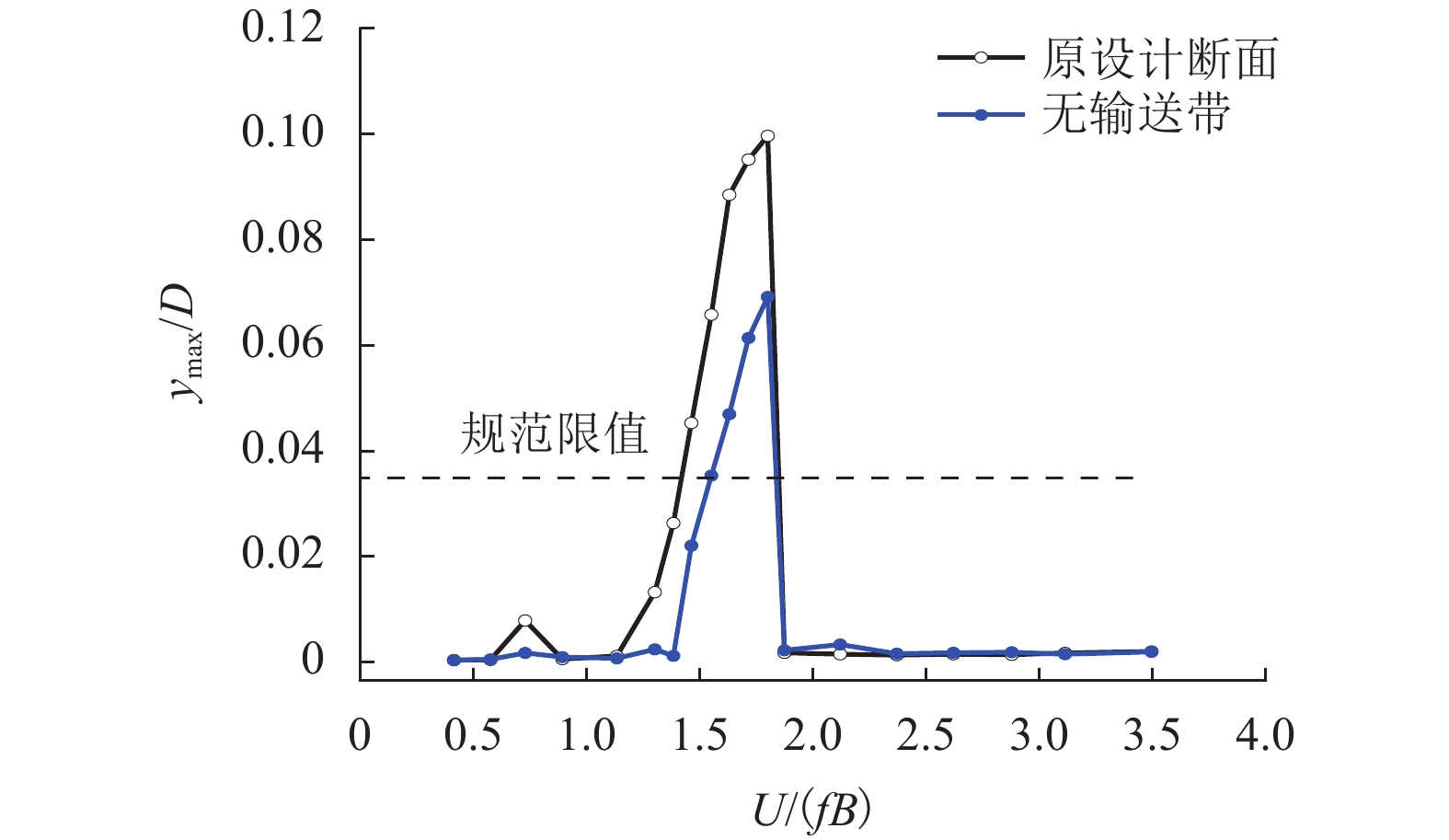
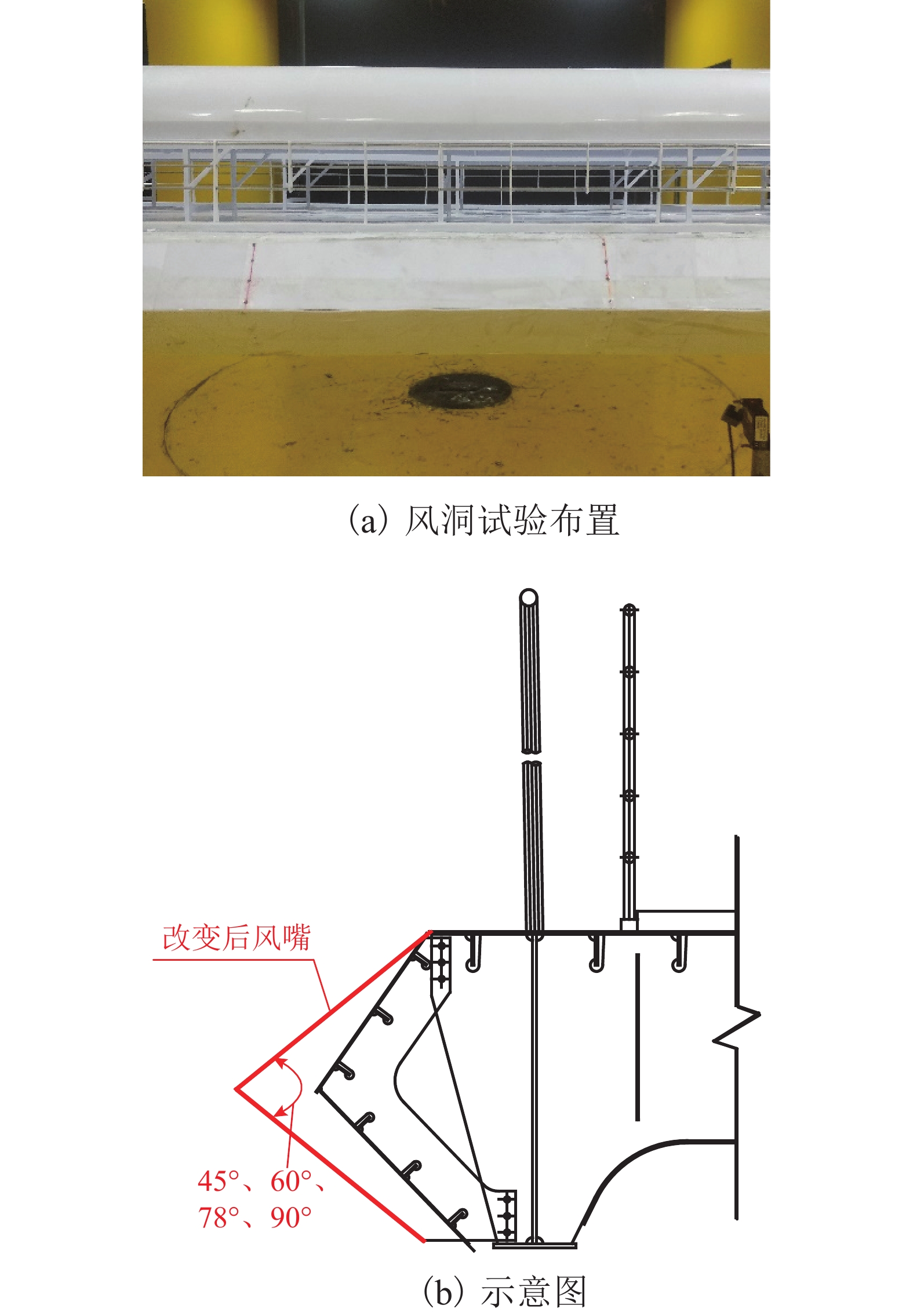
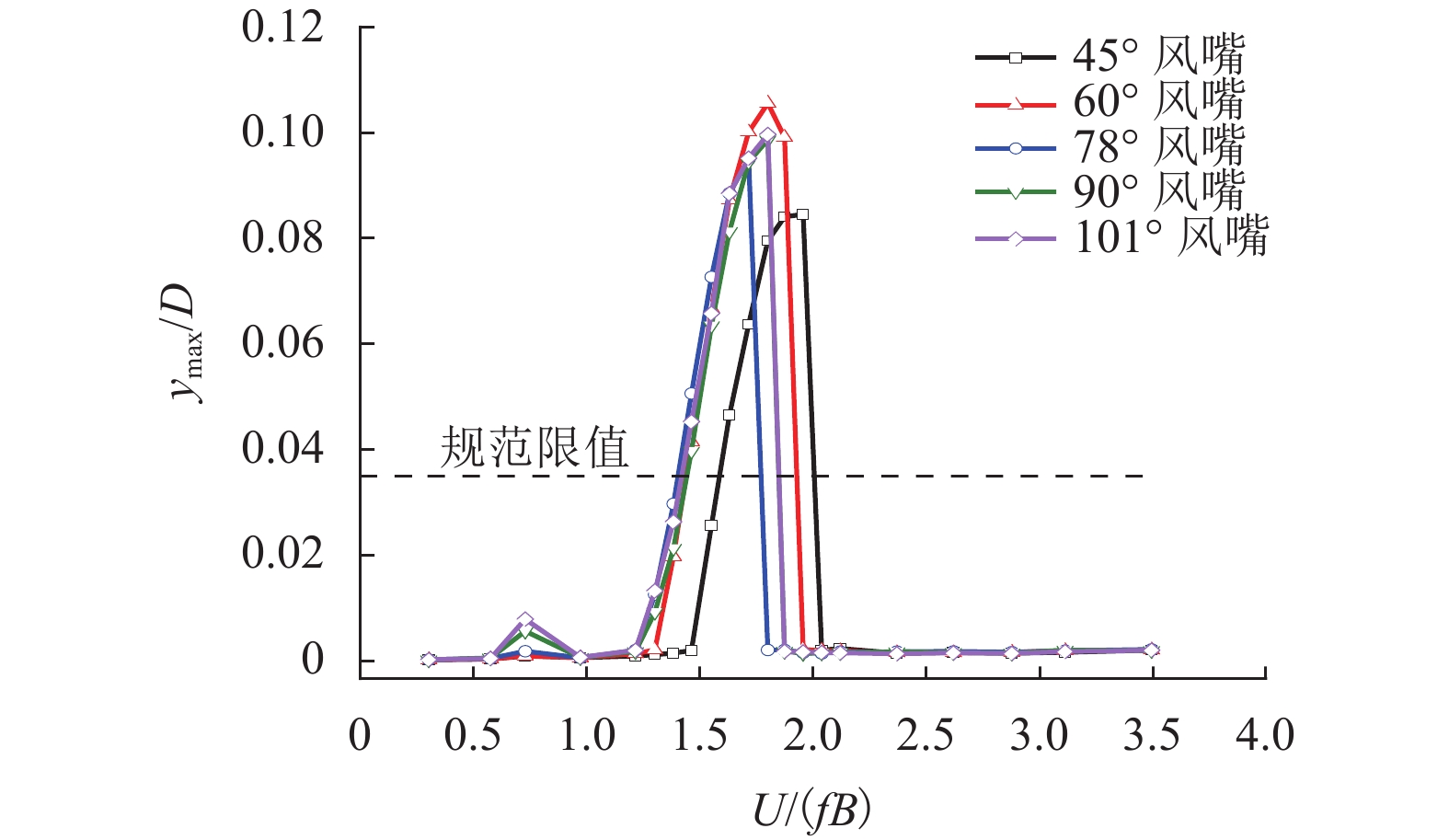
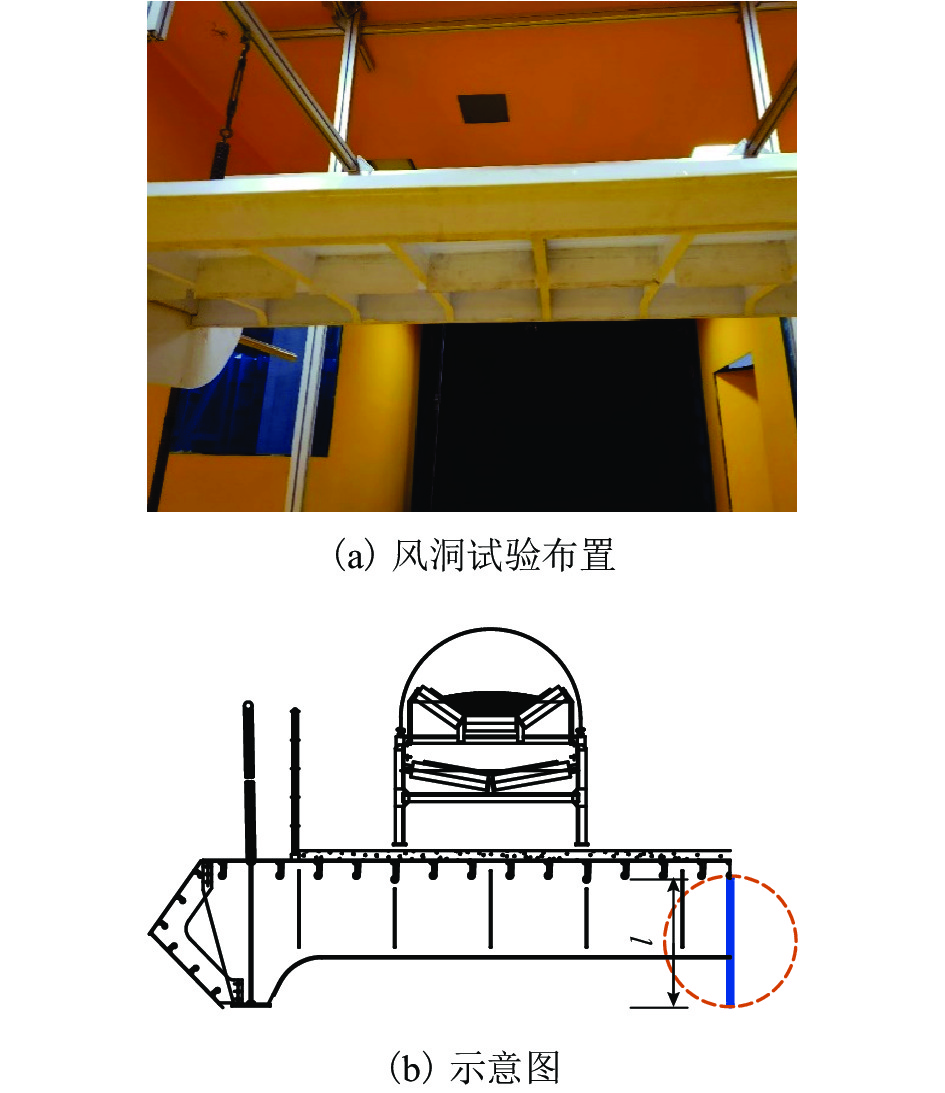
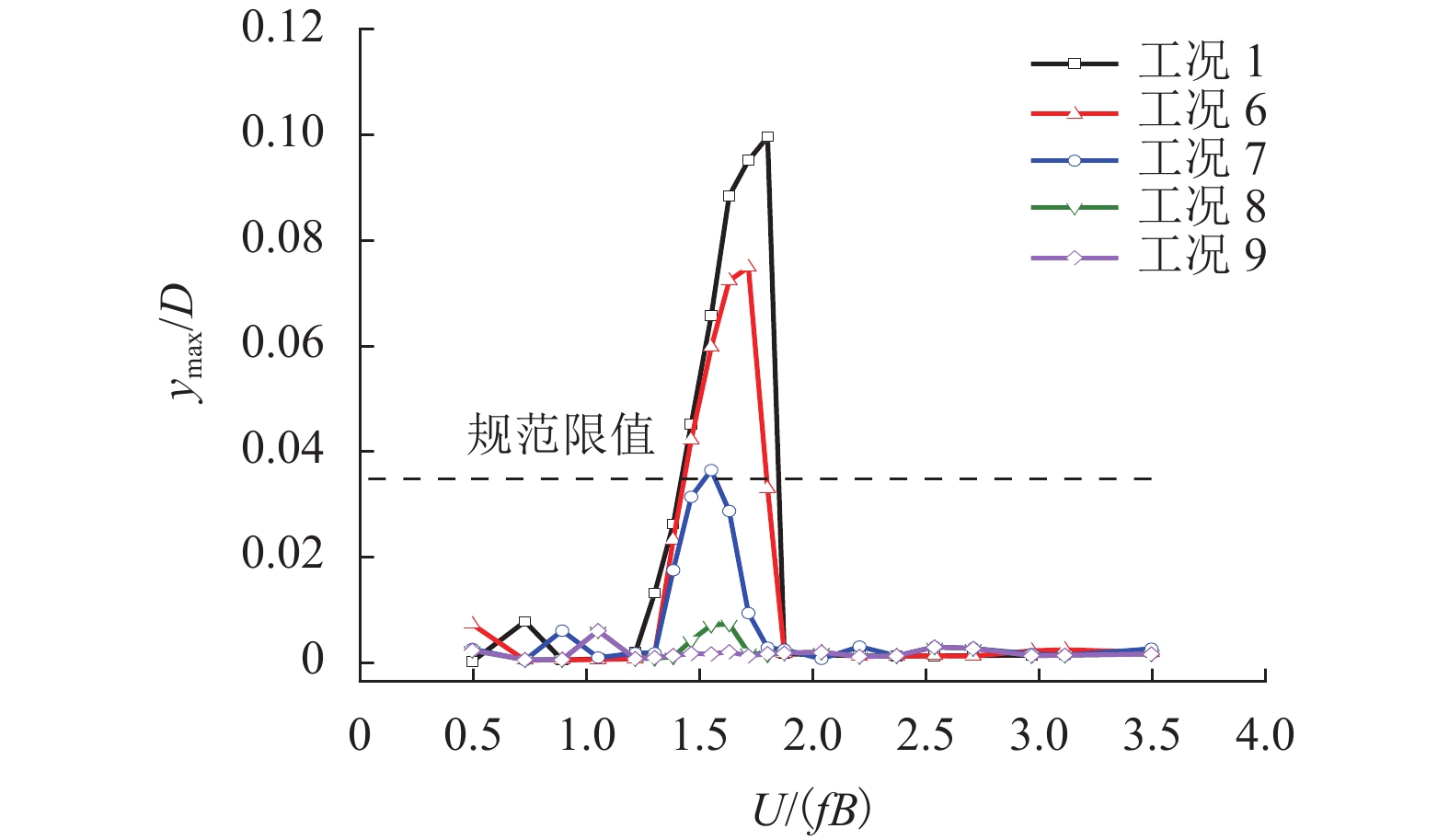
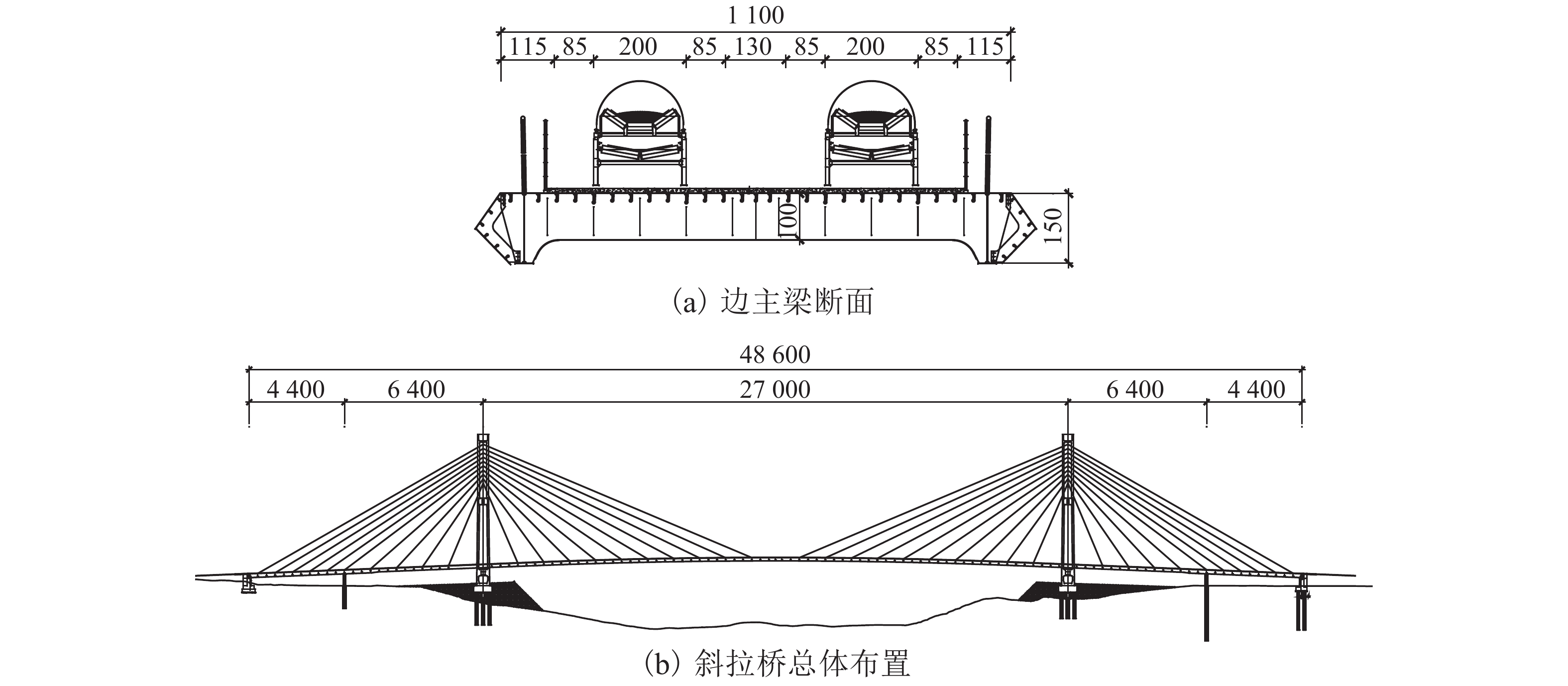
Conveyers on the bridge deck change the aerodynamic shape of the side girder. In order to explore the vortex-induced vibration performance and countermeasures of the side girder with a conveyer, a 1.00∶20.00 rigid segment model test of free suspension is carried out in wind tunnel. Firstly, the vortex-induced vibration performance of the side girder beam section with a conveyer is studied, and tests are conducted as to how it is affected by structural damping ratio. Secondly, the cases of whether a conveyer is equipped are compared. Finally, aerodynamic measures such as air nozzles, stabilizing plates at beam bottom, and horizontal baffles are used to optimize the vortex-induced vibration performance of the main girder section. The results show that the vortex-induced vibration performance of the side girder with a conveyer is poor at the specified 0° and ± 3° wind attack angles, and the maximum exceeds the specification limit value by 286%. The deck conveyer reduces the vortex-induced vibration stability of the main girder, and the peak value of the vortex-induced vibration response increases by 44%. The installation of stabilizing plates at beam bottom is beneficial to improve the vortex-induced vibration performance of the main beam, and the effect of stabilizing plates with the same height as the bottom of the beam becomes better with the increase in the number of stabilizing plates. The vortex-induced vibration suppression effect of the main beam is 93% when installing three stabilizing plates with a depth of 1.5 m. The 2.0 m high middle stabilizing plate extending 0.5 m from beam bottom can completely suppress the vortex-induced vibration. The nozzle has a little influence on the vortex-induced vibration performance of the main beam, but it has an optimal angle value in a certain range. When a horizontal baffle is separately arranged at the beam bottom, the peak value of vortex-induced vibration response is reduced by 17%. A combined measure of a nozzle, nozzle horizontal splitter plate, and horizontal baffle of 1 m width is adopted to optimize the main beam section, and the peak value of the vortex-induced vibration response of the main beam is reduced by 92%, which is far lower than the specification limit.

| [1] |
葛耀君. 大跨度斜拉桥抗风[M]. 北京: 人民交通出版社, 2019.
|
| [2] |
管青海,李加武,胡兆同,等. 栏杆对典型桥梁断面涡激振动的影响研究[J]. 振动与冲击,2014,33(3): 150-156. doi: 10.3969/j.issn.1000-3835.2014.03.029
GUAN Qinghai, LI Jiawu, HU Zhaotong, et al. Effects of railings on vortex-induced vibration of a bridge deck section[J]. Journal of Vibration and Shock, 2014, 33(3): 150-156. doi: 10.3969/j.issn.1000-3835.2014.03.029
|
| [3] |
刘君,廖海黎,万嘉伟,等. 检修车轨道导流板对流线型箱梁涡振的影响[J]. 西南交通大学学报,2015,50(5): 789-795. doi: 10.3969/j.issn.0258-2724.2015.05.004
LIU Jun, LIAO Haili, WAN Jiawei, et al. Effect of guide vane beside maintenance rail on vortex-induced vibration of streamlined box girder[J]. Journal of Southwest Jiaotong University, 2015, 50(5): 789-795. doi: 10.3969/j.issn.0258-2724.2015.05.004
|
| [4] |
张天翼,孙延国,李明水,等. 宽幅双箱叠合梁涡振性能及抑振措施试验研究[J]. 中国公路学报,2019,32(10): 107-114,168.
ZHANG Tianyi, SUN Yanguo, LI Mingshui, et al. Experimental study on vortex-induced vibration performance and aerodynamic countermeasures for a wide-width double-box composite beam[J]. China Journal of Highway and Transport, 2019, 32(10): 107-114,168.
|
| [5] |
龙俊贤,周旭辉,李前名,等. 带高防护结构的边箱叠合梁斜拉桥涡振性能及抑振措施研究[J]. 铁道科学与工程学报,2021,18(1): 119-127.
LONG Junxian, ZHOU Xuhui, LI Qianming, et al. Experimental study on vortex-induced vibration performance and aerodynamic countermeasures for a double-box composite beam cable stayed bridge with high protective structure[J]. Journal of Railway Science and Engineering, 2021, 18(1): 119-127.
|
| [6] |
李欢,何旭辉,王汉封,等. π型断面超高斜拉桥涡振减振措施风洞试验研究[J]. 振动与冲击,2018,37(7): 62-68.
LI Huan, HE Xuhui, WANG Hanfeng, et al. Wind tunnel tests for vortex-induced vibration control measures of a super high cable-stayed bridge with π-cross section[J]. Journal of Vibration and Shock, 2018, 37(7): 62-68.
|
| [7] |
李春光,黄静文,张记,等. 边主梁叠合梁涡振性能气动优化措施风洞试验研究[J]. 振动与冲击,2018,37(17): 86-92.
LI Chunguang, HUANG Jingwen, ZHANG Ji, et al. Aerodynamic optimization measures for VIV performances of a side girder composite beam based on wind tunnel tests[J]. Journal of Vibration and Shock, 2018, 37(17): 86-92.
|
| [8] |
张志田,卿前志,肖玮,等. 开口截面斜拉桥涡激共振风洞试验及减振措施研究[J]. 湖南大学学报(自然科学版),2011,38(7): 1-5.
ZHANG Zhitian, QING Qianzhi, XIAO Wei, et al. Vortex-induced vibration and control method for a cable-stayed bridge with open cross section[J]. Journal of Hunan University (Natural Sciences), 2011, 38(7): 1-5.
|
| [9] |
IRWIN P A. Bluff body aerodynamics in wind engineering[J]. Journal of Wind Engineering and Industrial Aerodynamics, 2008, 96(6/7): 701-712.
|
| [10] |
KUBO Y, SADASHIMA K, YAMAGUCHI E, et al. Improvement of aeroelastic instability of shallow π section[J]. Journal of Wind Engineering and Industrial Aerodynamics, 2001, 89(14/15): 1445-1457.
|
| [11] |
赵林,李珂,王昌将,等. 大跨桥梁主梁风致稳定性被动气动控制措施综述[J]. 中国公路学报,2019,32(10): 34-48.
ZHAO Lin, LI Ke, WANG Changjiang, et al. Review on passive aerodynamic countermeasures on main girders aiming at wind-induced stabilities of long-span bridges[J]. China Journal of Highway and Transport, 2019, 32(10): 34-48.
|
| [12] |
KUBO Y, KIMURA K, SADASHIMA K, et al. Aerodynamic performance of improved shallow π shape bridge deck[J]. Journal of Wind Engineering and Industrial Aerodynamics, 2002, 90(12/13/14/15): 2113-2125.
|
| [13] |
LI K, QIAN G, GE Y J, et al. Control effect and mechanism investigation on the horizontal flow-isolating plate for PI shaped bridge decks’ VIV stability[J]. Wind and Structure, 2019, 28(2): 99-110.
|
| [14] |
钱国伟,曹丰产,葛耀君. Ⅱ型叠合梁斜拉桥涡振性能及气动控制措施研究[J]. 振动与冲击,2015,34(2): 176-181.
QIAN Guowei, CAO Fengchan, GE Yaojun. Vortex-induced vibration performance of a cable-stayed bridge with Ⅱ shaped composite deck and its aerodynamic control measures[J]. Journal of Vibration and Shock, 2015, 34(2): 176-181.
|
| [15] |
孟晓亮,郭震山,丁泉顺,等. 风嘴角度对封闭和半封闭箱梁涡振及颤振性能的影响[J]. 工程力学,2011,28(增1): 184-188,194.
MENG Xiaoliang, GUO Zhenshan, DING Quanshun, et al. Influence of wind fairing angle on vortex-induced vibrations and flutter performances of closed and semi-closed box decks[J]. Engineering Mechanics, 2011, 28(S1): 184-188,194.
|
| [16] |
颜宇光,杨詠昕,周锐. 开口断面主梁斜拉桥的涡激共振控制试验研究[J]. 中国科技论文,2015,10(7): 760-764,787.
YAN Yuguang, YANG Yongxin, ZHOU Rui. Experimental study on vortex-induced vibration control measure for cable-stayed bridge with open sections[J]. China Sciencepaper, 2015, 10(7): 760-764,787.
|
Figures(13) / Tables(2)



 DownLoad:
DownLoad: