- ISSN 0258-2724
- CN 51-1277/U
- EI Compendex
- Scopus
- Indexed by Core Journals of China, Chinese S&T Journal Citation Reports
- Chinese S&T Journal Citation Reports
- Chinese Science Citation Database

| Citation: | LIANG Jun, YU Yang, WANG Wensa, CHEN Long. Optimal Control for Ride Comfort of Cooperative Adaptive Cruise Control System Under Mixed Traffic Flow[J]. Journal of Southwest Jiaotong University, 2021, 56(6): 1290-1297. doi: 10.3969/j.issn.0258-2724.20200514

|
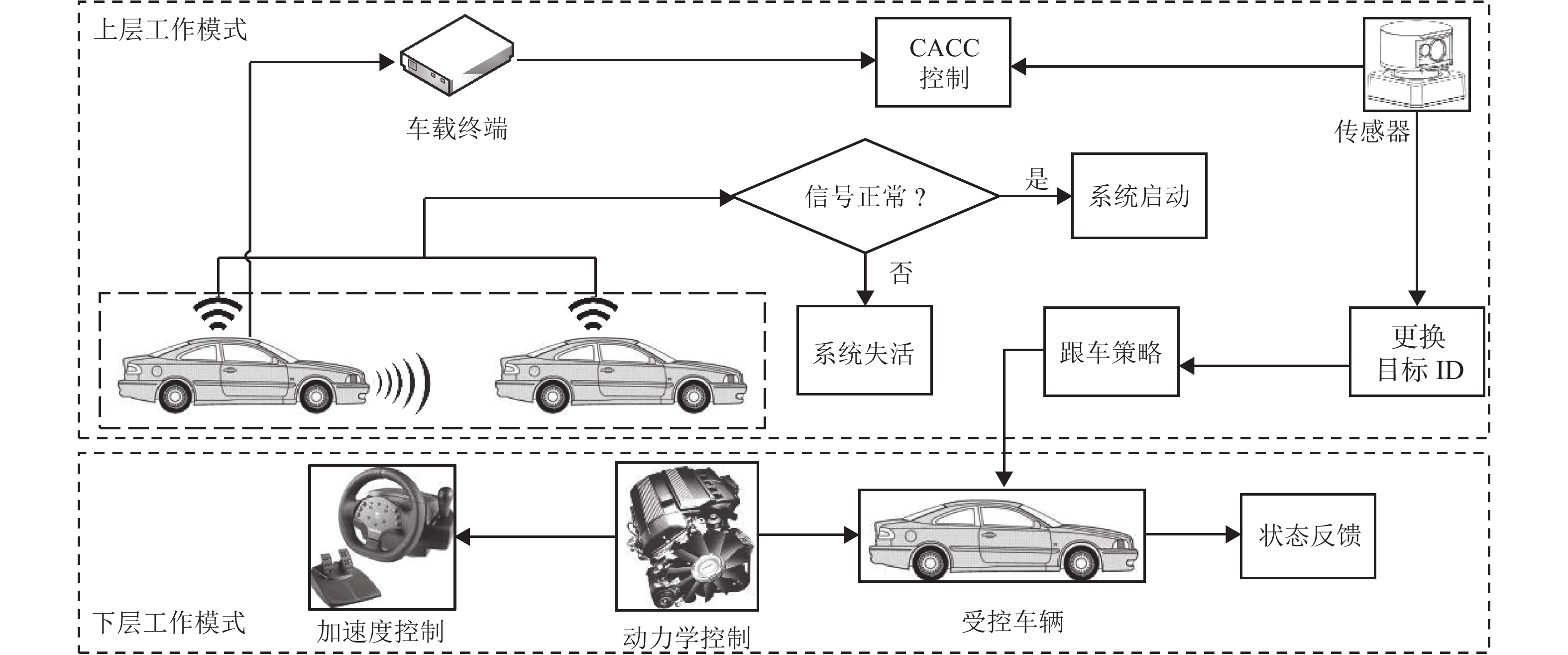
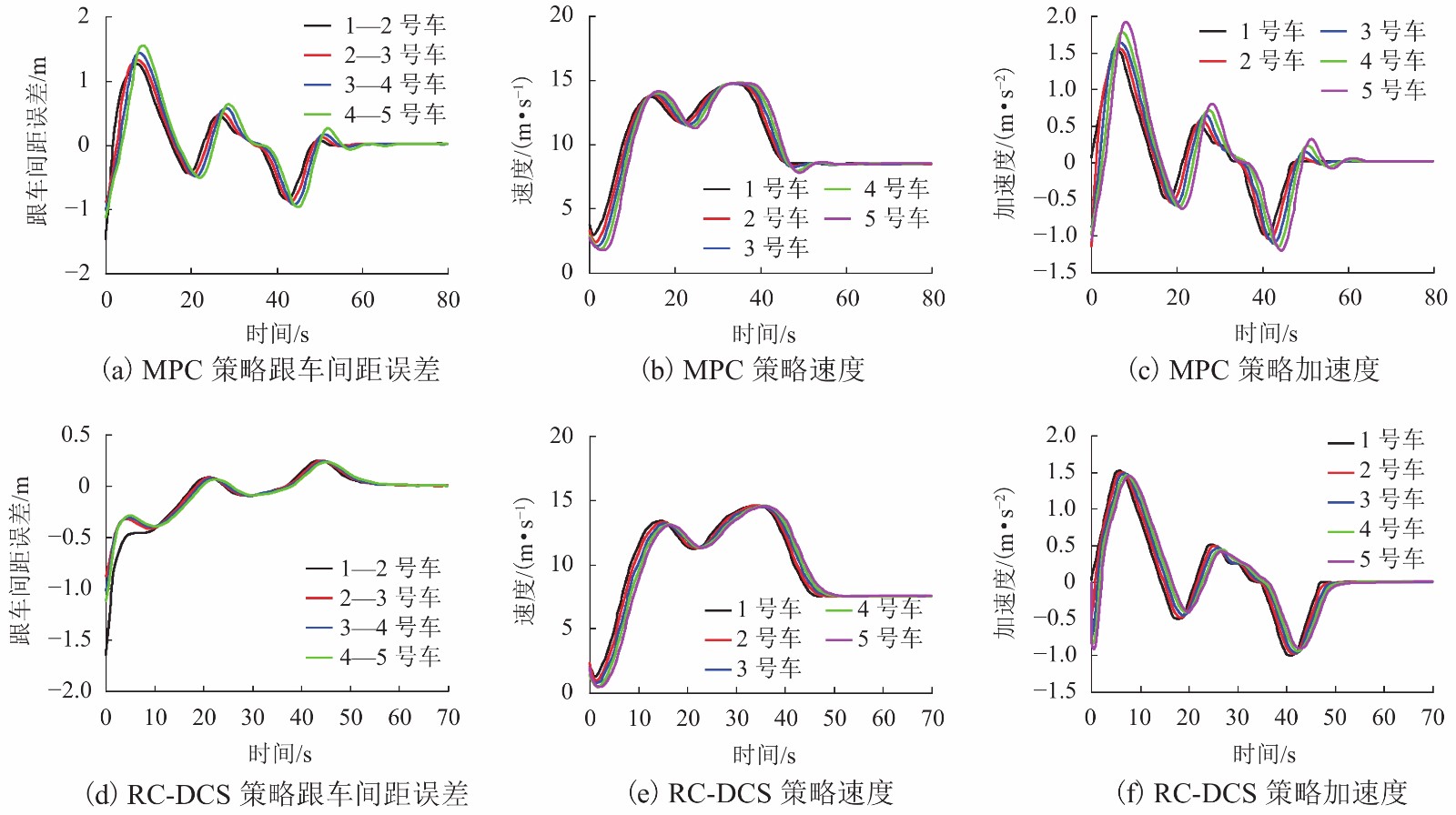
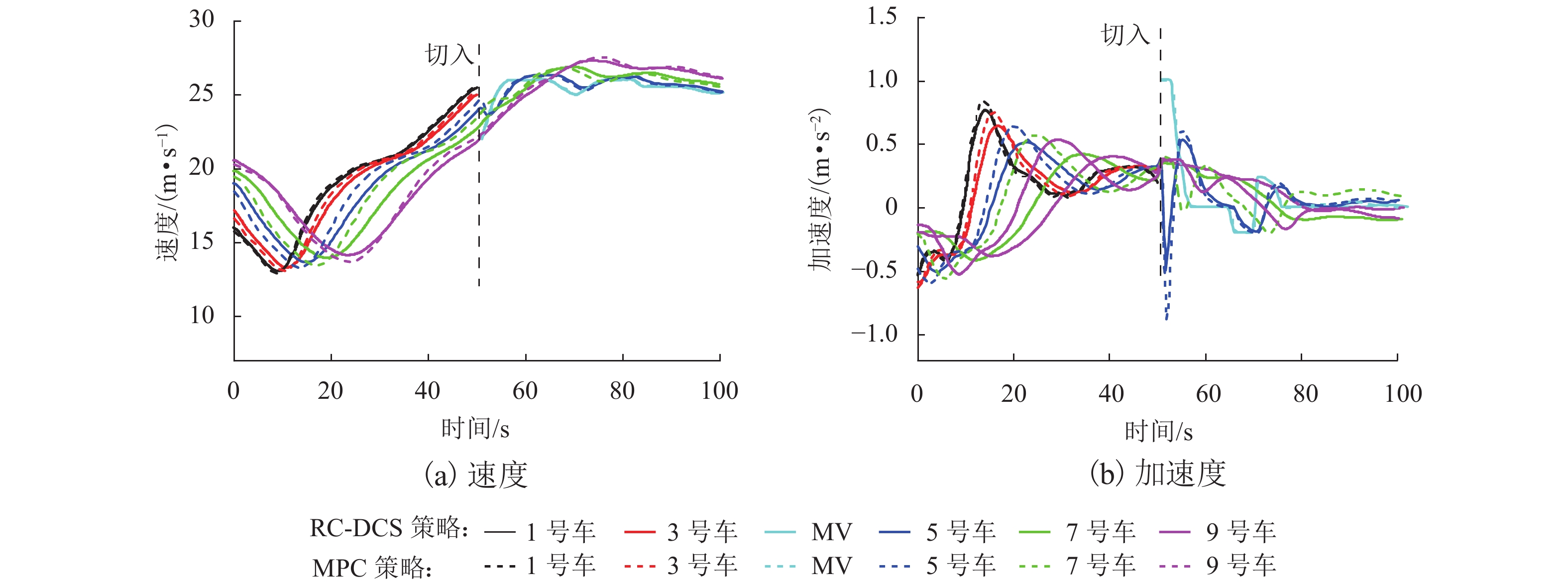
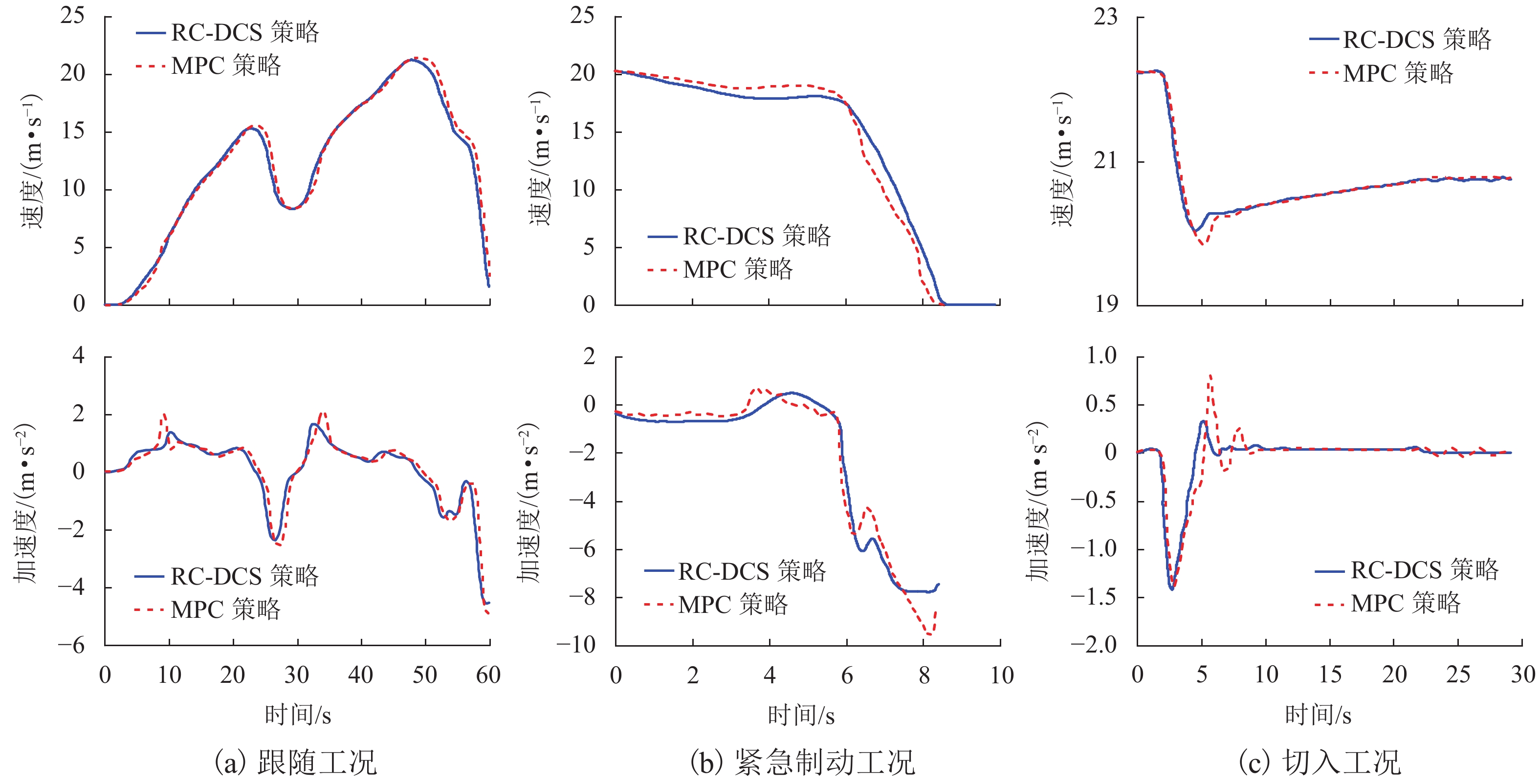
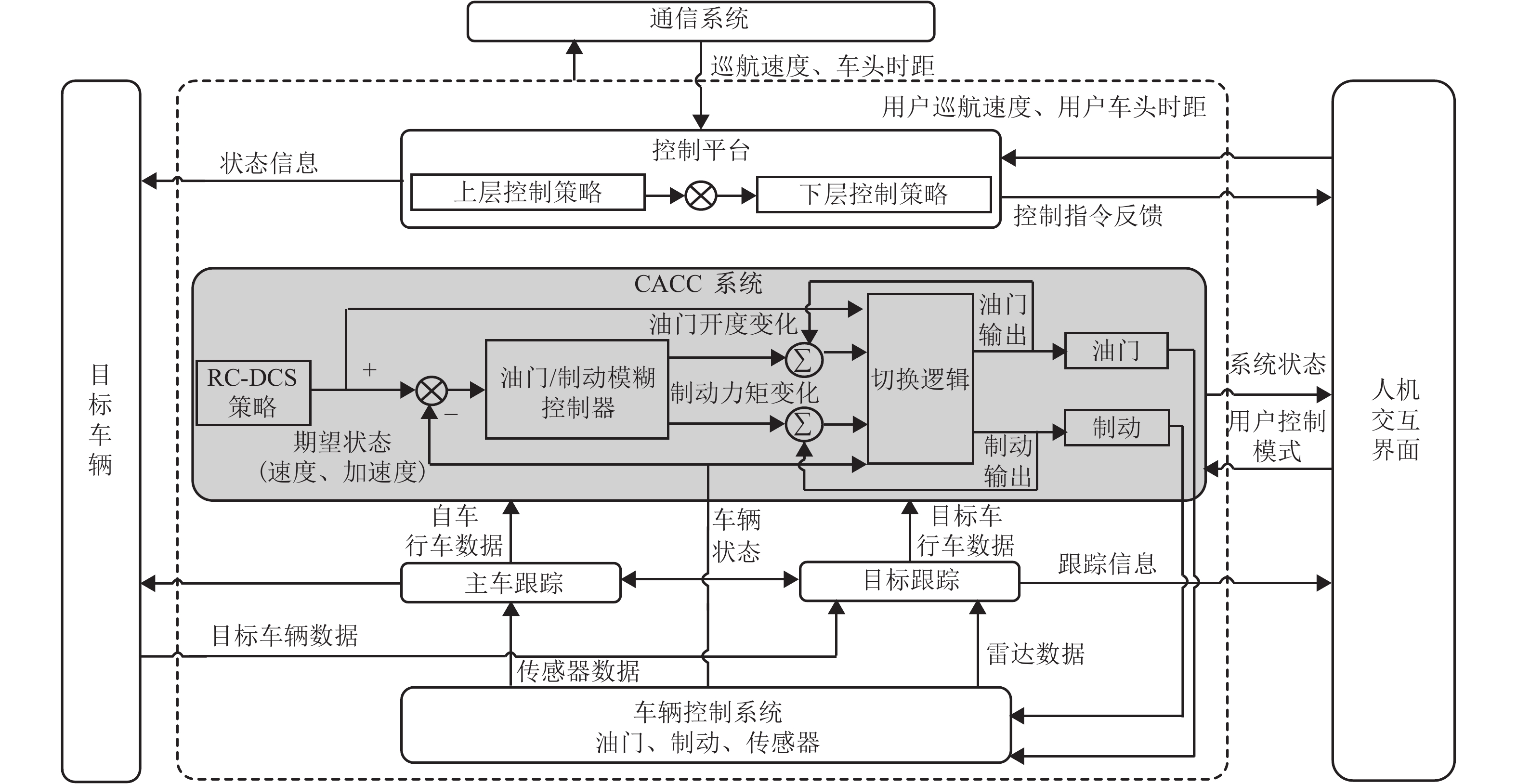
To improve the ride comfort of cooperative adaptive cruise control (CACC) system under the mixed traffic flow that comprises connected automated vehicle (CAV) and manual vehicle (MV), a dual-layer control strategy considering ride comfort (RC-DCS) is proposed. From a macro perspective, the upper controller adopts a two-state space model to adjust the following distance and speed, and improve the overall stability and comfort of the fleet by the use of the cost function. From a microscopic perspective, the lower controller optimizes the logic of switching the throttle and brake pedal of a single vehicle, and stabilizes its actual acceleration output, thereby reducing the pitch caused by frequent acceleration and deceleration. The experimental results show that, the RC-DCS can reduce the following distance error and acceleration by 72.44% and 24.87% respectively in following MV condition. In the condition of MV cut-in CACC fleet, the acceleration fluctuation is reduced by increasing the following headway of 0.4 s. In the three typical conditions of vehicle following, emergency braking and cut-in, the standard deviation of the single-vehicle acceleration is reduced by 9.6%, 10.4% and 2.9%, respectively.

| [1] |
BANSAL P, KOCKELMAN K M. Forecasting Americans’ long-term adoption of connected and autonomous vehicle technologies[J]. Transportation Research Part A:Policy and Practice, 2017, 95: 49-63. doi: 10.1016/j.tra.2016.10.013
|
| [2] |
KILINC A S, BAYBURA T. Determination of minimum horizontal curve radius used in the design of transportation structures, depending on the limit value of comfort criterion lateral jerk[R]. Rome: University of Saskatchewan, 2012.
|
| [3] |
FORSTBERG J. Ride comfort and motion sickness in tilting trains: Human responses to motion environments in train and simulator experiments[D]. Stockholm: Royal Institute of Technology, 2000.
|
| [4] |
POWELL J P, PALACÍN R. Passenger stability within moving railway vehicles:limits on maximum longitudinal acceleration[J]. Urban Rail Transit, 2015, 1(2): 95-103. doi: 10.1007/s40864-015-0012-y
|
| [5] |
GOLDING J F, MUELLER A G, GRESTY M A. A motion sickness maximum around the 0.2 Hz frequency range of horizontal translational oscillation[J]. Aviation,Space,and Environmental Medicine, 2001, 72(3): 188-192.
|
| [6] |
DONOHEW B E, GRIFFIN M J. Motion sickness:effect of the frequency of lateral oscillation[J]. Aviation,Space,and Environmental Medicine, 2004, 75(8): 649-656.
|
| [7] |
CHEUNG B, NAKASHIMA A. A review on the effects of frequency of oscillation on motion sickness[R]. Toronto: Defence Research and Development Toronto, 2006.
|
| [8] |
ELBANHAWI M, SIMIC M, JAZAR R. In the passenger seat:investigating ride comfort measures in autonomous cars[J]. IEEE Intelligent Transportation Systems Magazine, 2015, 7(3): 4-17. doi: 10.1109/MITS.2015.2405571
|
| [9] |
MILAKIS D, VAN AREM B, WEE B V. Policy and society related implications of automated driving:a review of literature and directions for future research[J]. Journal of Intelligent Transportation Systems, 2017, 21(4): 324-348. doi: 10.1080/15472450.2017.1291351
|
| [10] |
YANG C Y D, OZBAY K, BAN X. Developments in connected and automated vehicles[J]. Journal of Intelligent Transportation Systems, 2017, 21(1/2/3/4/5/6): 251-254.
|
| [11] |
HOOGENDOORN R G, VAN ARERM B, HOOGENDOOM S. Automated driving,traffic flow efficiency,and human factors:literature review[J]. Transportation Research Record, 2014, 2422(1): 113-120. doi: 10.3141/2422-13
|
| [12] |
TALEBPOUR A, MAHMASSANI H S. Influence of connected and autonomous vehicles on traffic flow stability and throughput[J]. Transportation Research Part C:Emerging Technologies, 2016, 71: 143-163. doi: 10.1016/j.trc.2016.07.007
|
| [13] |
SHLADOVER S E. Connected and automated vehicle systems:introduction and overview[J]. Journal of Intelligent Transportation Systems, 2018, 22(3): 190-200. doi: 10.1080/15472450.2017.1336053
|
| [14] |
JIA D Y, NGODUY D. Enhanced cooperative car-following traffic model with the combination of V2V and V2I communication[J]. Transportation Research Part B:Methodological, 2016, 90: 172-191. doi: 10.1016/j.trb.2016.03.008
|
| [15] |
SUN J, ZHENG Z D, SUN J. Stability analysis methods and their applicability to car-following models in conventional and connected environments[J]. Transportation Research Part B:Methodological, 2018, 109: 212-237. doi: 10.1016/j.trb.2018.01.013
|
| [16] |
ZHOU Y, WANG M, AHN S. Distributed model predictive control approach for cooperative car-following with guaranteed local and string stability[J]. Transportation Research Part B:Methodological, 2019, 128: 69-86. doi: 10.1016/j.trb.2019.07.001
|
| [17] |
MA Y L, LI Z X, MALEKIAN R, et al. Hierarchical fuzzy logic-based variable structure control for vehicles platooning[J]. IEEE Transactions on Intelligent Transportation Systems, 2019, 20(4): 1329-1340. doi: 10.1109/TITS.2018.2846198
|
| [18] |
王平,高天赐,汪鑫,等. 基于拟合平纵断面的铁路特大桥梁线路平顺性评估[J]. 西南交通大学学报,2020,55(2): 231-237, 272. doi: 10.1007/s12239-018-0034-z
WANG Ping, GAO Tianci, WANG Xin, et al. Smoothness estimation of super-large bridges in railway line based on fitting railway plane and profile[J]. Journal of Southwest Jiaotong University, 2020, 55(2): 231-237, 272. doi: 10.1007/s12239-018-0034-z
|
| [19] |
SONG X L, WANG K, HE D F. Switching multi-objective receding horizon control for CACC of mixed vehicle strings[J]. IEEE Access, 2020, 8: 79684-79694. doi: 10.1109/ACCESS.2020.2990426
|
| [20] |
ZHU M, CHEN H Y, XIONG G M. A model predictive speed tracking control approach for autonomous ground vehicles[J]. Mechanical Systems and Signal Processing, 2017, 87: 138-152. doi: 10.1016/j.ymssp.2016.03.003
|
| [21] |
ZHOU Y J, ZHU H B, GUO M M, et al. Impact of CACC vehicles’ cooperative driving strategy on mixed four-lane highway traffic flow[J]. Physica A:Statistical Mechanics and Its Applications, 2020, 540: 122721.1-122721.13. doi: 10.1016/j.physa.2019.122721
|
| [22] |
HE Y L, ZHOU Q, MAKRIDIS M, et al. Multiobjective co-optimization of cooperative adaptive cruise control and energy management strategy for PHEVs[J]. IEEE Transactions on Transportation Electrification, 2020, 6(1): 346-355. doi: 10.1109/TTE.2020.2974588
|
| [23] |
NIE L Z, GUAN J Y, LU C H, et al. Longitudinal speed control of autonomous vehicle based on a self-adaptive PID of radial basis function neural network[J]. IET Intelligent Transport Systems, 2018, 12(6): 485-494. doi: 10.1049/iet-its.2016.0293
|
Figures(5) / Tables(2)



 DownLoad:
DownLoad: