
图
1
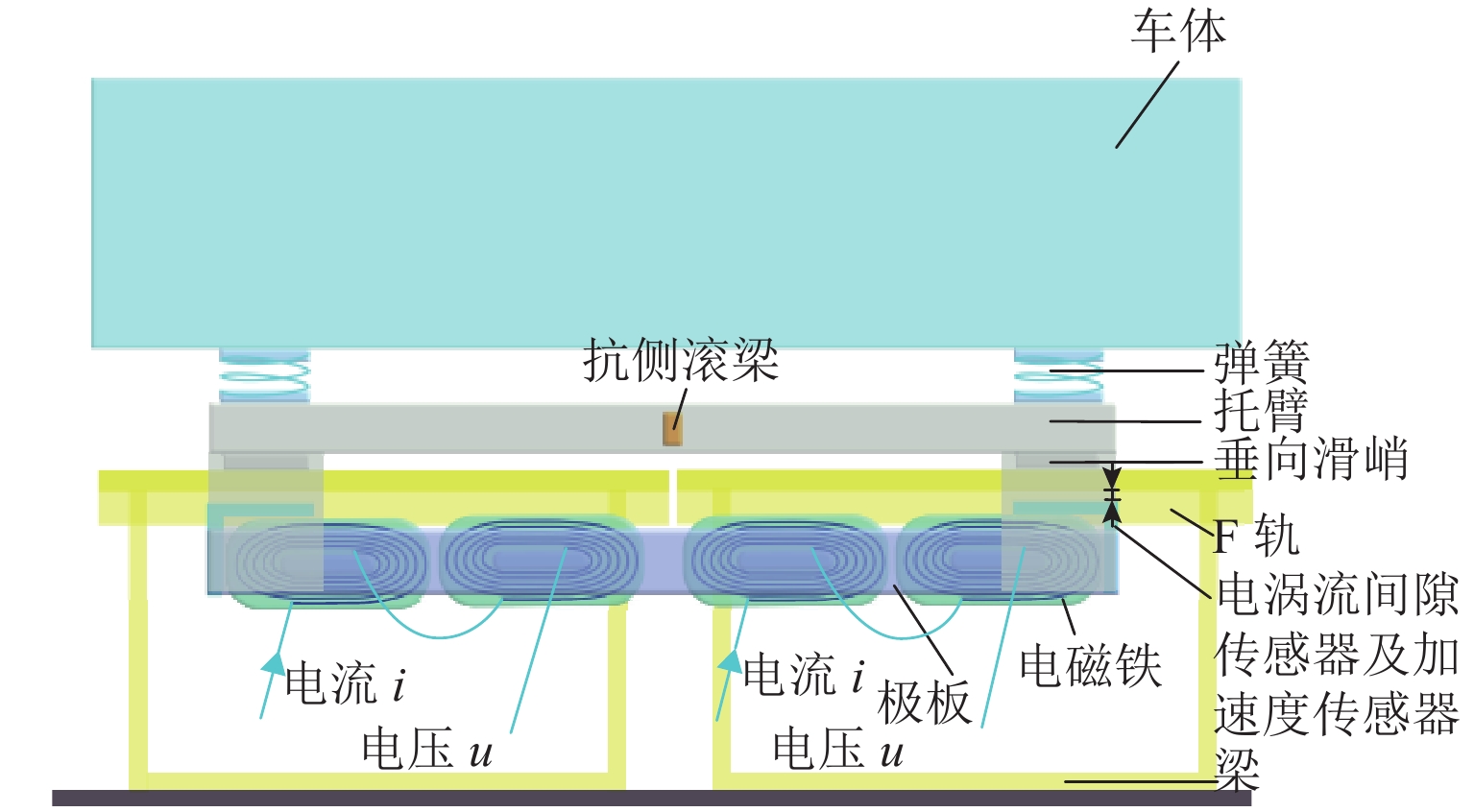
列车悬浮架结构
Figure
1.
Structure of levitation frame

| Citation: | WEN Hua, ZOU Jiaoli, CHENG Qiangong, ZHANG Min, GU Chengzhuang. Model Test on Geotextile Retaining Wall Using Construction Waste[J]. Journal of Southwest Jiaotong University, 2016, 29(6): 1087-1097. doi: 10.3969/j.issn.0258-2724.2016.06.007

|
磁浮列车因其无接触运行、爬坡能力强、噪声小等优点得到了研究人员的广泛关注. 但是悬浮系统的敏感性、开环不稳定性和非线性给控制器的设计带来很大挑战[1]. 控制器的指令响应速度与闭环鲁棒性相互矛盾,需要权衡两者的关系[2].
消除悬浮架撞击轨道梁现象需要提高指令响应速度;当列车运行在不平顺的轨道梁上或停车上下客时,会影响稳定悬浮,从而需要增加控制系统的鲁棒性. 但提高指令响应速度与增加系统的闭环鲁棒性两者相互矛盾,因为线路情况多变并且环境较为恶劣[3],提升算法鲁棒性显得更为重要[4-5].
针对文献[6]提出的悬浮控制器,其非线性、模型不确定性和轨道不平顺产生的干扰力被视为对简化线性模型的扰动,通常采用扩张状态观测器观测和抑制扰动[7-9],并采用反馈控制实现对期望间隙的跟踪,但是其算法的反馈系数是固定的,影响了列车对不同线路的适应能力. 针对多变的运行工况,文献[10]提出一种实用的变结构滑模控制算法,但滑模控制在系统达到滑模面附近有颤振现象,易导致悬浮架紧固件松动,增加检修工作量;文献[11]提出一种神经网络自适应控制算法应对车体质量变化的影响.
变化的工况使得磁浮列车传递函数具有不确定性,需要对所受干扰力进行实时参数估计和补偿[5]. 定参数控制很难适应这种状态,每隔一段时间都需要针对现场运营状态重新调整以控制参数[12].
当被控对象结构已知,且参数变化不大时,模型参考自适应(MRAC)控制是提高跟踪精度的一个很好的选择[13-14],算法的稳态误差较小[15]. 本文以中低速磁浮列车为对象,基于MRAC控制器需要固定的参数少,相同的代码可以适应不同线路的特点[6],开展自学习模型参考自适应(SMRAC)悬浮控制策略研究. 为维持稳定悬浮效果,对微分信号加入了限幅,并将学习率与参数稳定值联系起来,悬浮过程采用变步长迭代. 通过李雅普诺夫稳定性判据证明了控制器的稳定性,通过仿真和实验验证所设计的控制器在大误差时有较快的跟踪性能. 仿真和实验表明,与比例-积分-微分(PID)算法和线性二次型调节器(LQR)算法[16]相比,所提出的自学习模型参考自适应控制算法能够适应不同的线路工况,且稳定时的悬浮间隙波动更小.
中低速磁悬浮列车中一个悬浮架上有8个电磁铁,分为4组,每组2个电磁铁形成一个控制点,如图1所示. 控制器独立控制电磁铁的电流,有独立的传感器测量电流、间隙和加速度,悬浮架结构左右互相悬吊,控制点之间相互解耦. 车体载荷由空气弹簧传递至悬浮架上;悬浮架由电磁铁产生的电磁力吸附轨道实现悬浮;位移加速度传感器安装在电磁铁端部,测量悬浮间隙和电磁铁加速度;电流传感器测量电磁铁线圈电流. 根据间隙传感器输出值计算出目标电流,通过电流传感器的输出值动态调节线圈电流[4],使列车在运行中悬浮架与F轨保持名义悬浮间隙[17].
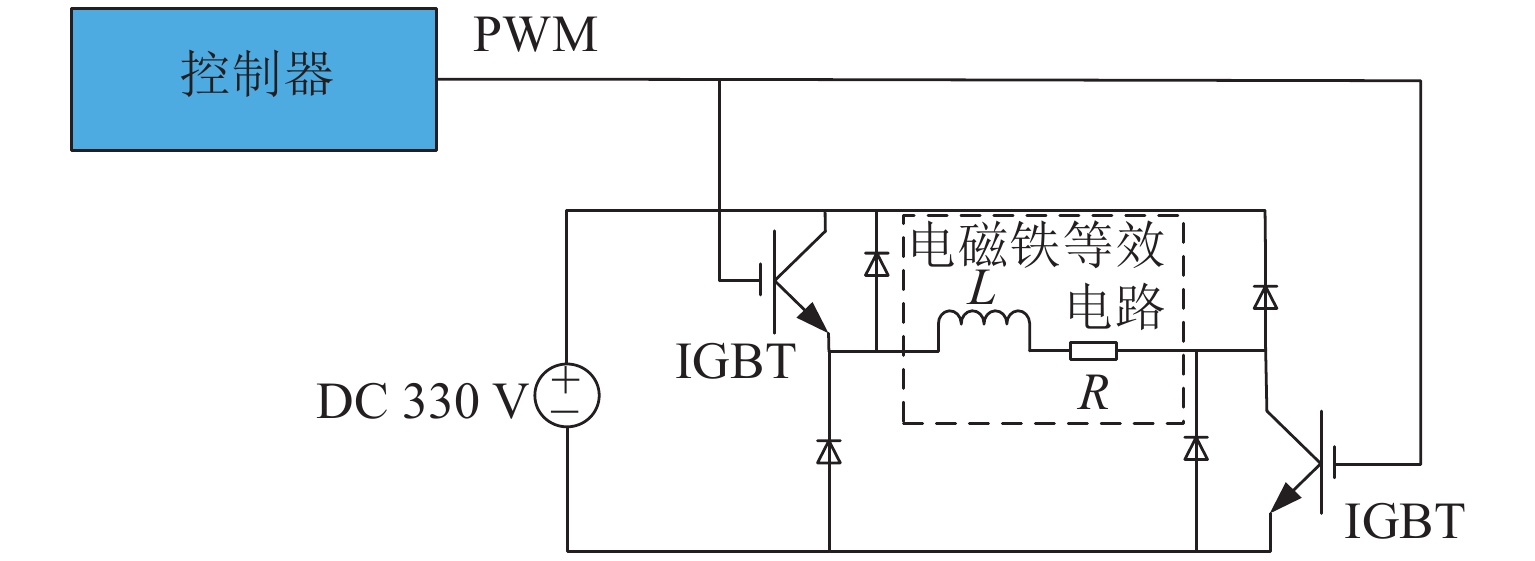
电磁铁控制电路如图2所示,图中:L为电感;R为电磁铁电阻;IGBT为绝缘栅双极型晶体管. 由控制器产生的脉冲宽度调制波形(PWM)控制通断,驱动电压为DC 330 V.
对于电磁力的计算[18]有
| F=μ0N2S4(ix)2, | (1) |
式中:N为电磁铁线圈的匝数;S为电磁铁极板正对面积;µ0为真空磁导率;x为极板与F轨的距离.
磁悬浮系统的非线性控制模型为
| m¨x=−F(x,i)+mg+f, | (2) |
式中:g为重力加速度;m为一个悬浮控制点承担的等效质量;f为轨道不平顺及传感器噪声带来的干扰力.
电感量L随间隙的变化为
| L=μ0N2S2x. | (3) |
电磁铁两端的电压u与电流i的关系为
| u=Ri+ddt(Li)=Ri+μ0N2S2x˙i−μ0N2Si2x2˙x. | (4) |
为了简化控制问题,目前稳定控制器经典的设计方法是将系统视为基于给定名义工作点(x0,i0)附近的小扰动线性模型[6],其泰勒级数展开式为
| F(x,i)=F(x0,i0)+∂F(x,i)∂i|(x0,i0)(i−i0)+∂F(x,i)∂x|(x0,i0)(x−x0)+o=F(x0,i0)+μ0N2i0S2x20(i−i0)−μ0N2i20S2x30(x−x0)+o=mg+μ0N2i0S2x20i−μ0N2i20S2x30x+o, | (5) |
式中:o为$F(x,i)$的高阶项.
将式(5)代入式(2),有
| m¨x=μ0N2i20S2x30x−μ0N2i0S2x20i+f+o. | (6) |
进而得到电磁铁的状态方程[19]如式(7). 实际控制系统中,加速度中的干扰力和高阶项在仿真时用噪声信号代替.
| {˙x1=x2,˙x2=−μ0N2S4m(x3x1)2+g,˙x3=x2x3x1+2x1μ0N2S(u−x3R,)y=x1, | (7) |
式中:x1=x;x2=v(速度);x3=i.
被控对象状态方程可以简化为
| {˙x=Ax+Bu,y=Cx+Du, | (8) |
式中:${\boldsymbol{A}}{\rm{ = }}\left[ {010μ0N2Si202mx300−μ0N2Si02mx200i0x0−2Rx0μ0N2S} \right] $;${\boldsymbol{B}}{\rm{ = }}\left[ {002x0μ0N2S} \right] $;${\boldsymbol{C}} = [ {100} ] $;${\boldsymbol{D}} = [ 0 ] $;x = [x1 x2 x3]T.
设定参考模型的状态方程为
| {˙x=Amx+Bmyr,y=Cmx+Dmyr, | (9) |
式中:${{\boldsymbol{A}}_m} = \left[ {010−101−ω2ms0−ω2m−2ζmωms0−s0−2ζmωm} \right]$,${\omega _{\rm{m}}}$为参考模型的自然角频率,${\zeta _{\rm{m}}}$为阻尼比(取${\zeta _{\rm{m}}} \geqslant 1$以保证系统稳定),$ {s_0} $为参考模型的实数极点;$ {{\boldsymbol{B}}_{\rm{m}}} = {\left[ {00ω2ms0} \right]^{\rm{T}}} $;$ {{\boldsymbol{C}}_{\rm{m}}} = [ {100} ] $;$ {{\boldsymbol{D}}_{\rm{m}}} = [0] $;yr为参考输入;xm为参考模型.
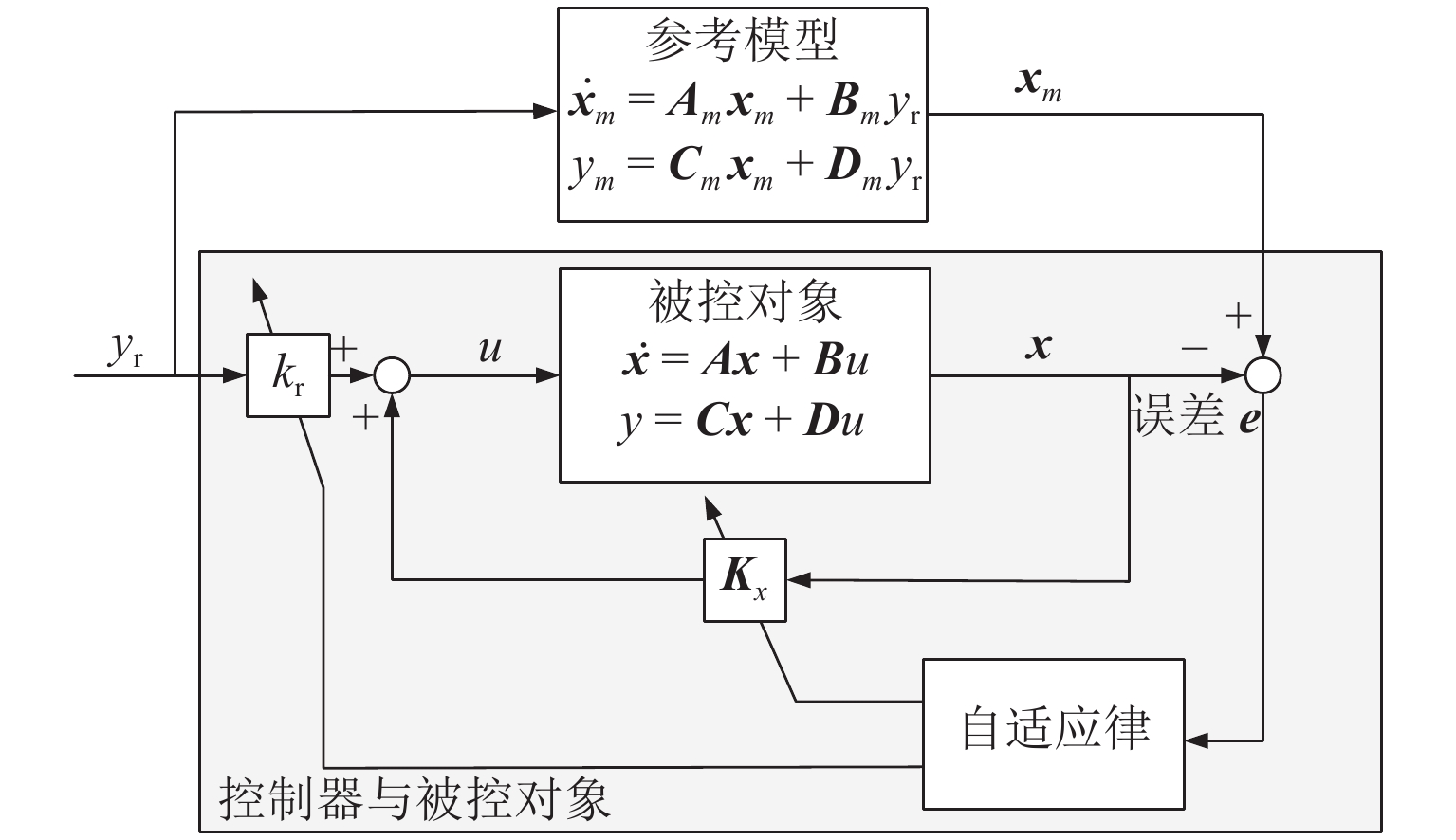
转化为具体的传递函数后,整个系统连接如图3所示[6],图3中:$ {{\boldsymbol{K}}_{\boldsymbol{x}}} $为对应被控对象x的可调参数;kr为对应参考输入yr的可调参数.
控制器的输出可表示为
| u=Kxx+kryr. | (10) |
控制器与被控对象组成的闭环系统最终应当与参考模型一致,设定可调参数的误差值${{\boldsymbol{\tilde K}}_{\boldsymbol{x}}}(t){\rm{ = }} {{\boldsymbol{K}}_{\boldsymbol{x}}}(t) - {\boldsymbol{K}}_{\boldsymbol{x}}^*$,${\tilde k_{\rm{r}}}(t) = {k_{\rm{r}}}(t) - $$k_{\rm{r}}^*$. 其中:$ {{\boldsymbol{\tilde K}}_{\boldsymbol{x}}} $为$ {{\boldsymbol{K}}_{\boldsymbol{x}}} $的误差值;${\tilde k_{\rm{r}}}$为${k_{\rm{r}}}$的误差值;t为时间;${\boldsymbol{K}}_{\boldsymbol{x}}^* $和$k_r^* $分别为${{\boldsymbol{K}}_{\boldsymbol{x}}}(t) $和${k_r}(t) $稳定后的数值,${\boldsymbol{K}}_{\boldsymbol{x}}^*{\rm{ = }}\left[ {k∗x1k∗x2k∗x3} \right] $;Kx = [kx1 kx2 kx3]. 当参数达到稳定时,有$ {\boldsymbol{A}} + {\boldsymbol{B}}{\boldsymbol{K}}_{\boldsymbol{x}}^*{\text{ = }}{{\boldsymbol{A}}_{\rm{m}}} $,${\boldsymbol{B}}k_{\rm{r}}^*{\text{ = }}{{\boldsymbol{B}}_{\rm{m}}}$.
对于控制器和被控对象组成的状态方程有
| ˙x=Ax+Bu=(A+BKx)x+Bkryr=(A+BK∗x+B˜Kx)x+B(k∗r+˜kr)yr=(Am+B˜Kx)x+Bmyr+B˜kryr. | (11) |
设定参考模型和被控对象的误差为
| e=xm−x. | (12) |
对误差求导得到:
| ˙e=˙xm−˙x=Am(xm−x)+Bmyr+Amx−(A+BKx)x−Bkryr=Ame−B˜Kxx−B˜kryr. | (13) |
设定一个满足李雅普诺夫函数的方程为
| V(e,˜Kx,˜kr)=eTPe+˜KxΓ−1x˜KTx+˜k2rγr, | (14) |
式中:${\boldsymbol{\varGamma }}_{ \boldsymbol{x}}$为矩阵${{{\tilde {\boldsymbol{K}}}}_{\boldsymbol{x}}}$的学习率;P为待求矩阵;$ {\gamma _{\rm{r}}} $为$ {\tilde k_{\rm{r}}} $的学习率.
为求解李雅普诺夫方程,引入对称矩阵P=PT,并且有
| ATmP+PAm=−Q, | (15) |
式中:Q为正定矩阵.
对式(14)求导,代入式(13)可得:
| ˙V(e,˜Kx,˜kr)=−eTQe+2eTP(−B˜Kxx−B˜kryr) + 2˜KxΓ−1x˙˜KTx + 2˜kr˙˜krγr. | (16) |
因为$ {{\boldsymbol{e}}^{\text{T}}}{\boldsymbol{PB}} $的计算结果为标量,有$2{{\boldsymbol{e}}^{\text{T}}}{\boldsymbol{PB}}{{{\tilde {\boldsymbol{K}}}}_{\boldsymbol{x}}}{\boldsymbol{x}}{\text{ = }}$$2{{{\tilde {\boldsymbol{K}}}}_{\boldsymbol{x}}}{\boldsymbol{x}}{{\boldsymbol{e}}^{\text{T}}}{\boldsymbol{PB}}$,则式(16)可以改写为
| ˙V(e,˜Kx,˜kr)=−eTQe+2˜Kx(−xeTPB+Γ−1x˙˜KTx)+2kr(−eTPByr+˙˜krγr). | (17) |
为了使$\dot V\left( {{\boldsymbol{e}},{{{{\tilde {\boldsymbol{K}}}}}_{\boldsymbol{x}}},{{\tilde k}_{\rm{r}}}} \right) \leqslant 0$,对于自适应律应当满足
| {˙˜KTx = ΓxxeTPB,˙˜kr = γreTPByr. | (18) |
可调参数学习率矩阵展开为
| Γx = [γx1000γx2000γx3]. | (19) |
则式(17)可以写为
| ˙V(e,˜Kx,˜kr)=−eTQe⩽−λmin(Q)‖e‖2⩽0. | (20) |
因为$\dot V\left( {{\boldsymbol{e}},{{{{\tilde {\boldsymbol{K}}}}}_{\boldsymbol{x}}},{{\tilde k}_{\rm{r}}}} \right) \leqslant 0$,所以${\boldsymbol{e}}\left(t\right)、{{\boldsymbol{K}}}_{{\boldsymbol{x}}}\left(t\right)和{k}_{{\rm{r}}}\left(t\right)$是有界的.
对李雅普诺夫函数求2阶导可得
| ¨V(e,˜Kx,˜kr)=−˙eTQe−eTQ˙e=−eT(QAm+ATmQ)e−2eTQ(Ame−B˜Kxx−B˜kryr). | (21) |
根据Barbalat引理,$\dot V\left( {{\boldsymbol{e}},{{{{\tilde {\boldsymbol{K}}}}}_{\boldsymbol{x}}},{{\tilde k}_r}} \right) \to 0$,误差矩阵e渐进稳定,所以该算法控制器和被控对象组成的整体结构最终会与参考模型一致.
学习率越大,可调参数每次的变化量越小,跟踪速度越快,迭代越精确,越有利于提高响应速度,适合稳定悬浮时应对轨道不平顺及上下坡造成的干扰. 初始悬浮时,因为悬浮间隙有较大变化,应当降低学习率以提升响应速度. 为此,提出根据参数的最终稳定值动态调整学习率的方案,如式(22).
| {˙˜KTx=ΓxxeTPB(ym−y)−l|ym−y|,˙˜kr=γreTPByr(ym−y)−l|ym−y|, | (22) |
式中:l为学习率的下降速率.
为对比模型参考自适应控制和自学习模型参考自适应控制效果,引入PID控制和LQR控制.
PID控制的输出可以表示为[20]
| u=kp(gap−ym)+ki∫(gap−ym)dt+kd∫accdt+kaacc, | (23) |
式中:kp、ki、kd分别为误差的比例、积分和微分项系数;ka为误差的高阶影响系数;gap为间隙传感器检测值,具有较好的低频性能;acc为加速度传感器检测值,具有较好的高频性能,gap和acc综合作用可互补控制器的频率特性.
LQR控制器具有较强的鲁棒性和动态特性,计算后的控制参数能使系统达到预想状态[21].
设定系统的性能指标函数为
| J=12∫t0(xTQLx+uTLRuL)dt, | (24) |
式中:QL为半正定矩阵;R为正定矩阵;uL为控制器的输出函数,如式(25).
| uL=−R−1BPLx, | (25) |
式中:PL为正定矩阵,且PL满足黎卡提矩阵代数方程
| −PLA+ATPL+PLBR−1BTPL−QL=0. | (26) |
最优反馈增益k为
| k=−R−1BPL. | (27) |
通过在实验基地对悬浮架进行调试实验得到以下仿真、测试结果,为更好地了解SMRAC算法的优越性,加入了PID、LQR、MRAC算法作为对比.
表1为悬浮架主要参数,为尽可能与实际情况相符,需要代入到电磁悬浮模型中.
| 参 数 | 数 值 |
| 等效质量/kg | 510 |
| 电磁铁等效内阻/Ω | 0.98 |
| 电磁铁等效电感/mH | 36 |
| 电磁铁匝数 N | 640 |
| 正对横截面积/m2 | 0.078 4 |
| 真空磁导率/(H·m−1) | 4π × 10−7 |
为衡量各算法控制效果,引入EITAE(t)用于描述误差积分的时间历程,如式(28).
| EITAE(t)=∫t0τ|e(τ)|dτ, | (28) |
式中:${e(\tau )} $为时刻τ目标值与当前值的误差.
为衡量全局误差大小,引入EIAE(t),如式(29).
| EIAE(t)=∫t0|e(τ)|dτ. | (29) |
用ERMSE(t)衡量全程算法的波动,波动越小最终计算值越小,计算方式为
| ERMSE(t)=√1t∫t0e2(τ)dτ. | (30) |
对于误差的计算,为能准确衡量算法性能,没有将起浮和降落阶段纳入计算范围,悬浮指标应当满足超调量$\sigma \leqslant 5{\text{%}} $,${t_{\rm{s}}} \leqslant $1 s(ts为调节时间,表示间隙到达并保持在目标间隙5%误差带内所需时间). 所以,设计的参考模型参数为${\omega _{\rm{m}}} = 31.62$,${\xi _{\rm{m}}} = 11.06$,$ {s_0} $=100. 为了简化运算,Q设定为单位矩阵I,代入式(15)可求得
| P=[−250621051100100−40050092002400601200200−40050092002−160610951100100−500501200200400601200200−500501200200−400401200200]. | (31) |
将式(31)代入式(18)中,得到迭代公式为
| {˙˜kx1=(0.84e1−1.05e2−0.84e3)x1,˙˜kx2=(0.84e1−1.05e2−0.84e3)x2,˙˜kx3=(0.84e1−1.05e2−0.84e3)x3,˙˜kr=(0.84e1−1.05e2−0.84e3)yr. | (32) |
根据表1计算出可调参数矩阵代入方程(18)得到理想值为$ k_{x1}^* = - 0.16 $,$ k_{x2}^* = 0.2 $,$ k_{x3}^* = 0.2 $,$k_r^*{\rm{ = }} {\mu _0}{N^2}S\omega _{\rm{m}}^2{s_0}/\left( {2x_0^{}} \right){\rm{ = }}0.125 $.
根据经验,PID控制方法的系数取值ki=300,kp=300,kd=20,ka=2,LQR的参数取值为
| QL = [1000010000.5],R=I. |
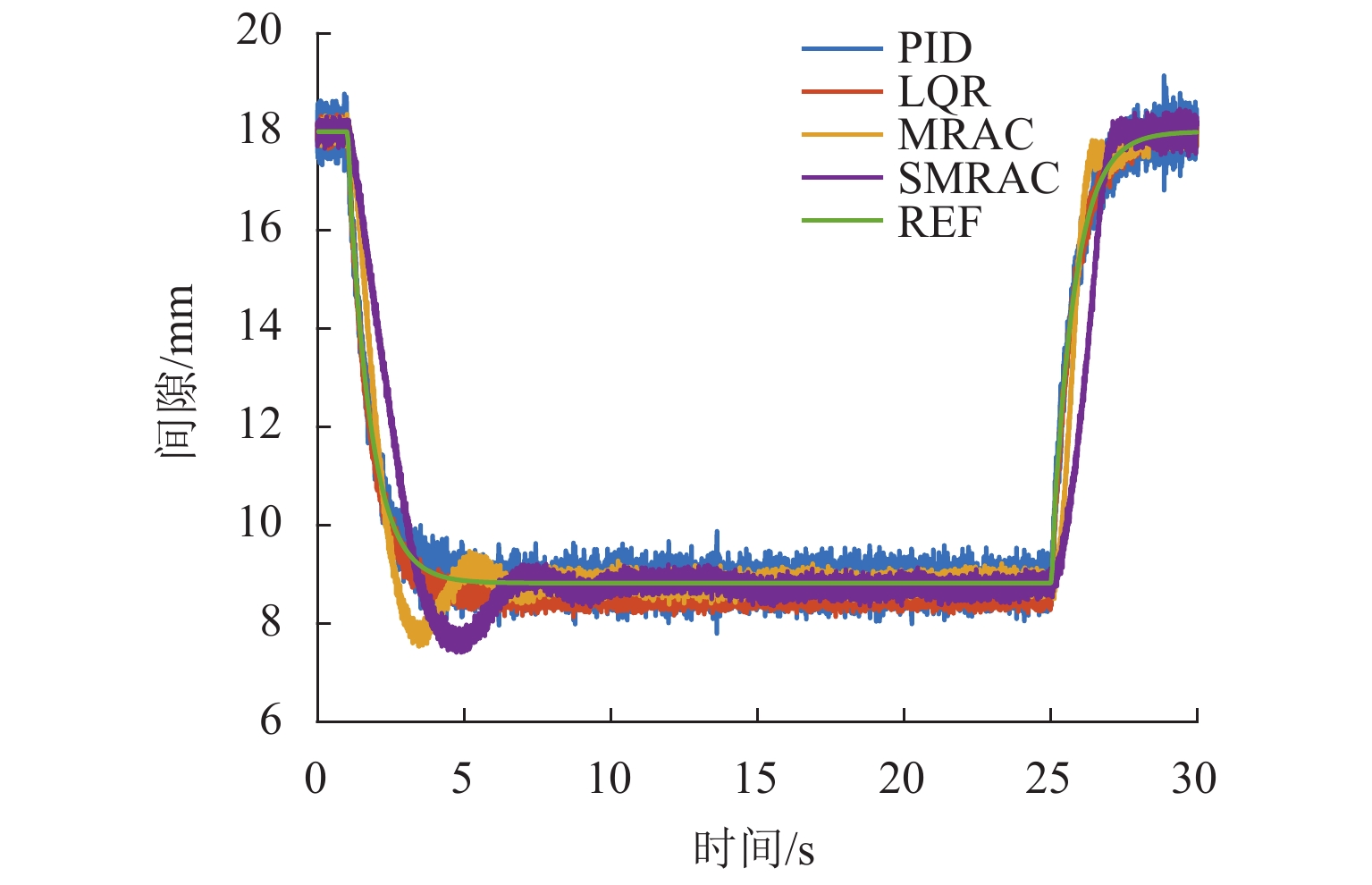
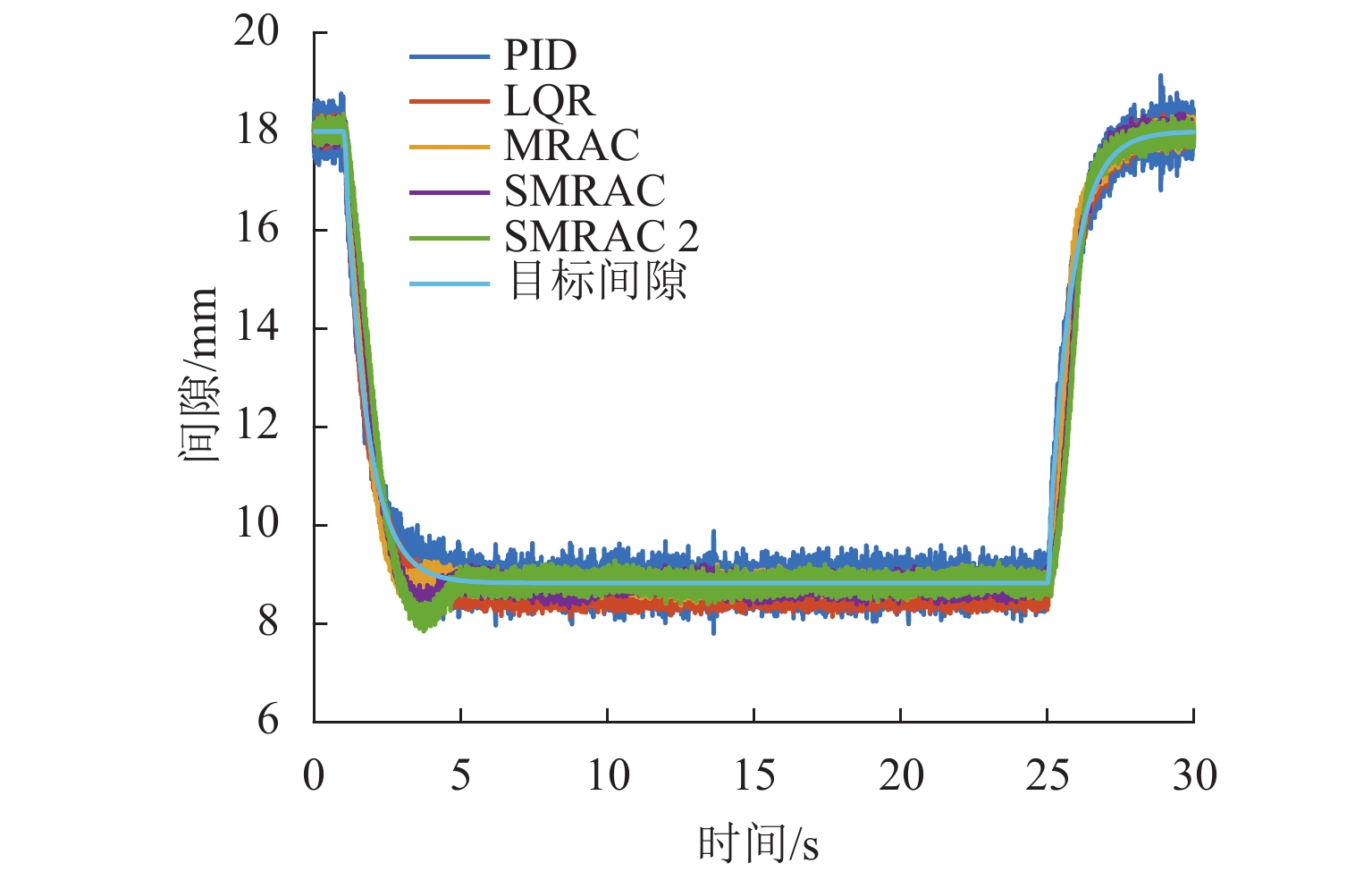
采用前述4种控制算法对一个包含起浮、悬浮和降落3个阶段的完整悬浮过程进行仿真计算,结果如图4所示. 其中,SMRAC 2采用SMRAC算法,但是可调参数设定为最终的稳定值. 计算中,设置t=1 s时发送起浮指令,t=25 s时发送降落指令,起浮和降落阶段的间隙变化采用过阻尼. 计算结果取悬浮阶段的数据进行分析.
图4显示:从起浮到降落的全过程中,4种控制算法都能很好地跟踪参考信号. 各种算法性能对比如表2中“正常悬浮”一栏所示;不同算法上升时间和调节时间对比如表3所示,上升时间tr表示调节量从10%到90%所用的时间.
| 参考信号 控制器 | 正常悬浮 | 方波信号 | 正弦信号 | ||||||||
| EITAE | EIAE | ERMSE | EI | ERMSE | EIAE | ERMSE | |||||
| PID | 38.67 | 3.82 | 0.24 | 38.68 | 3.82 | 0.24 | 38.68 | 3.82 | 0.24 | ||
| LQR | 51.20 | 5.10 | 0.28 | 51.44 | 5.12 | 0.28 | 51.43 | 5.11 | 0.28 | ||
| MRAC | 16.72 | 1.69 | 0.11 | 34.34 | 3.3 | 0.22 | 164.78 | 16.44 | 0.92 | ||
| SMRAC | 19.51 | 1.97 | 0.12 | 43.23 | 4.28 | 0.27 | 128.23 | 13.37 | 0.76 | ||
由图4和表2可知:t=5~25 s范围,PID算法能很好地跟踪参考信号,但间隙波动最大,对噪声抑制能力差;LQR算法波动较小,但是稳态误差最大;MRAC算法能完全跟踪参考输入,对噪声抑制性能好;SMRAC算法通过调整学习率,增大了上升时间和调节时间,但是提升了舒适度和系统的鲁棒性.
| 控制算法 | 上升时间 | 调节时间 |
| PID | 1.57 | 2.03 |
| LQR | 1.40 | 1.71 |
| MRAC | 1.57 | 2.03 |
| SMRAC | 1.02 | 1.41 |
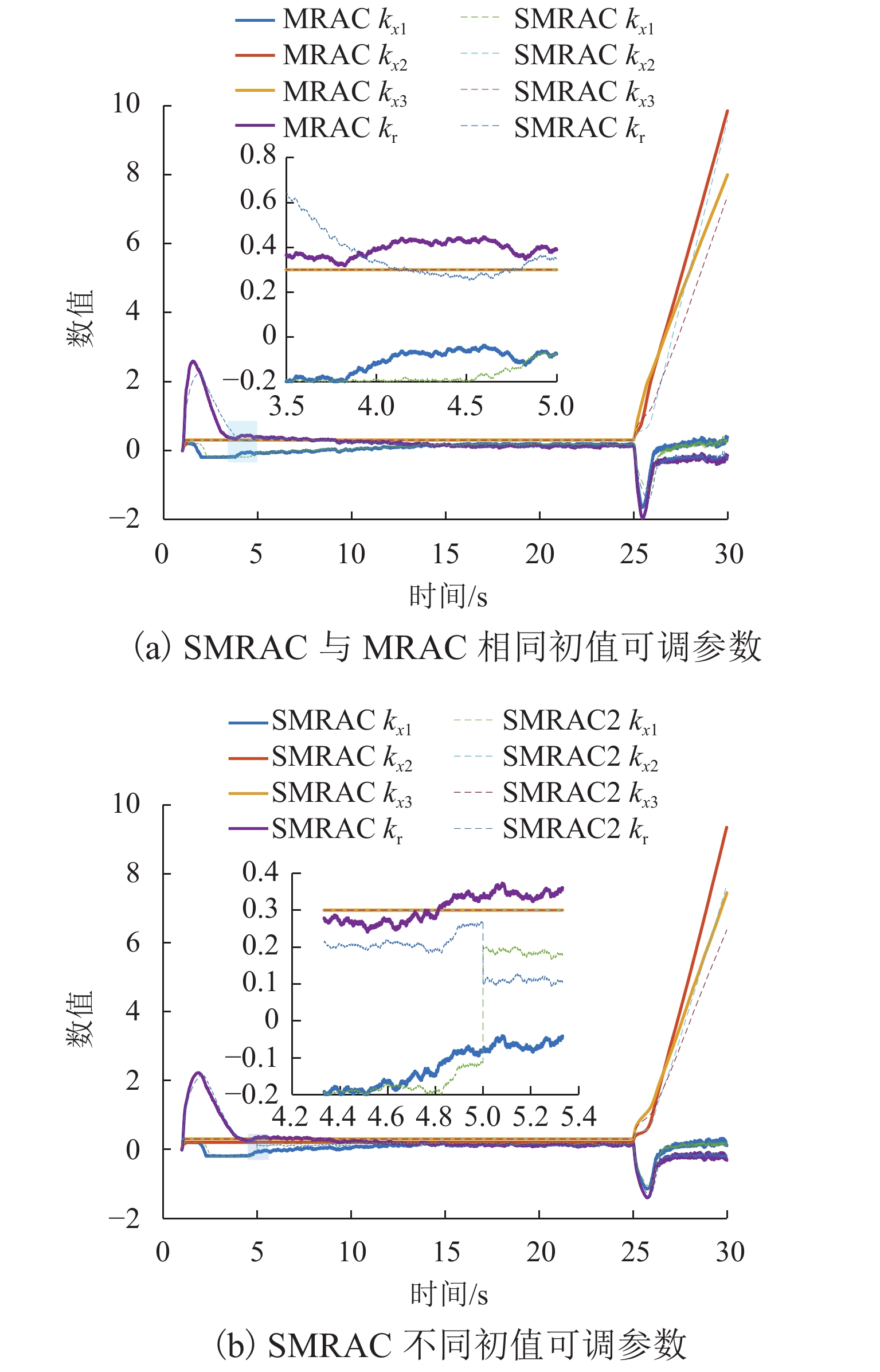
MRAC和SMRAC的kx1、kx2、kx3和kr变化如图5(a)所示. 由图5(a)可知:由于干扰很强,误差的微分很难收敛,需要对kx2限幅才会使系统稳定,kx1和kr能最终收敛;由于SMRAC的kx2能更快达到收敛,所以SMRAC控制能更快实现稳定悬浮.
SMRAC不同初值可调参数变化对比如图5(b)所示,实线表示未设定初值的可调参数变化,虚线表示在正常悬浮时设定合适初值的可调参数变化. 由图5(b)可知,设定合适初值后,kx1、kx2、kx3和kr变化可以忽略,系统一直处于稳定状态直至降落.
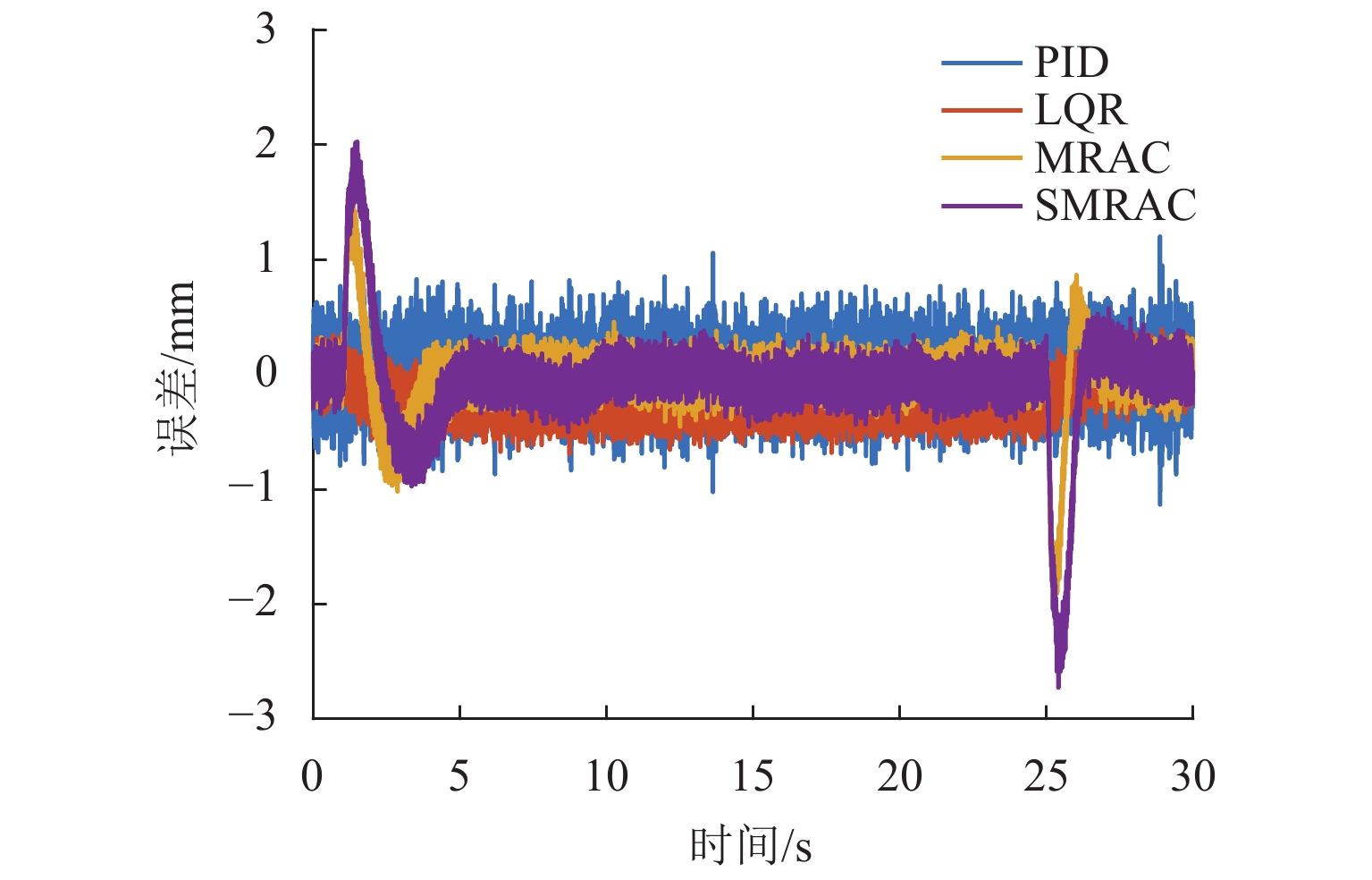
4种算法的仿真跟踪误差变化如图6所示. 由图6可知:在悬浮阶段,MRAC和SMRAC算法误差最小;但在起浮和降落阶段,MRAC和SMRAC算法因为有学习过程,误差较其他算法明显增大.
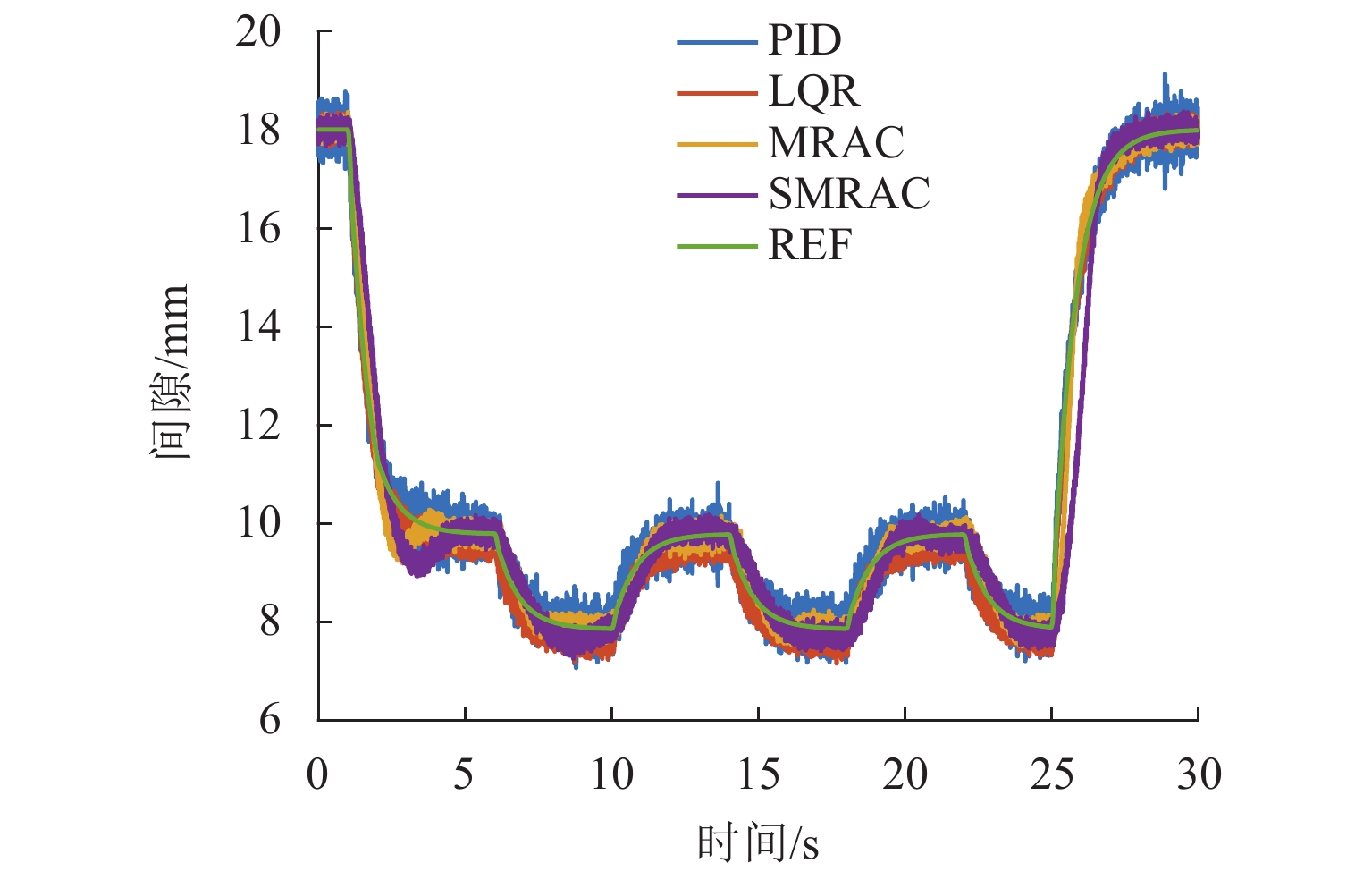
在运营线路中,轨道紧固件可能出现松动,低速跨越不同轨道时间隙会有突变,为了模拟该工况,在悬浮阶段加入0.125 Hz的方波激励,幅度变化为3 mm,目标间隙(REF)在8 mm和10 mm间交替变化. 4种算法得到的间隙变化如图7所示,性能对比如表2中“方波信号”一栏所示. 由图7和表2可知:t=5~25 s范围,MRAC、SMRAC需要0.50 s的调节时间才能跟踪参考输入信号,这导致与参考间隙有很大的误差;PID和LQR跟随性能较好,但是PID算法间隙波动较大,LQR算法稳态误差较大.
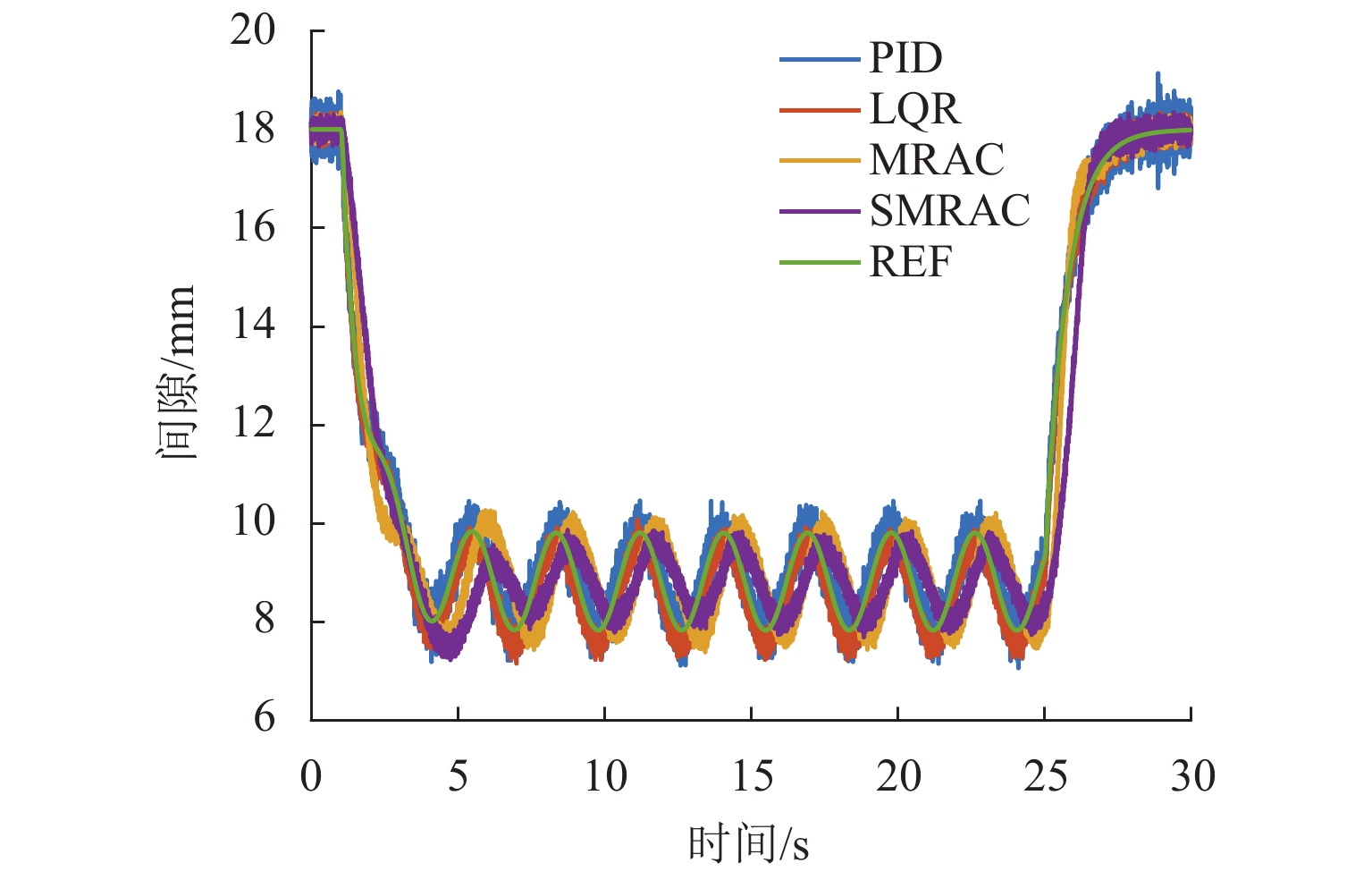
为了测试不同算法的动态跟踪性能,在悬浮阶段加入${y_{\rm{r}}}(t) = 8.5 + 2\sin (3{\text{π}}t)$的正弦激励,4种算法得到的间隙变化如图8所示,性能对比如表2中“正弦信号”一栏所示. 由图8和表2可知:t=5~25 s范围,MRAC、SMRAC在可调参数收敛后与参考间隙有一定的相位差,这是由参考模型的传递函数决定的;PID和LQR没有学习过程,但是PID算法稳定时间隙波动较大,LQR算法的稳态误差较大.
为验证算法的鲁棒性,将被控对象质量增大为原来的3倍[18],控制器的其余参数保持不变,得到的波形如图9所示. 由图9可知:悬浮架质量变为3倍后,MRAC 和 SMRAC波动变大,但LQR 和 PID波动更为明显;MRAC 和 SMRAC 算法产生的间隙波动范围显著小于 LQR 和 PID 算法的间隙变化,说明 MRAC和 SMRAC 算法具有良好的鲁棒性.
质量变为3倍后不同算法性能对比如表4所示,上升时间和调节时间对比如表5所示. 由表4、5可知,MRAC和SMRAC的误差比PID和LQR更小,而SMRAC增加了上升时间和调节时间,即使在重载情况下也能提升舒适度.
| 控制算法 | PID | LQR | MRAC | SMRAC |
| EITAE | 35.10 | 51.07 | 26.55 | 57.22 |
| EIAE | 3.54 | 5.09 | 2.70 | 7.23 |
| ERMSE | 0.22 | 0.28 | 0.17 | 0.45 |
| 控制算法 | 上升时间 | 调节时间 |
| PID | 1.84 | 2.02 |
| LQR | 1.57 | 2.02 |
| MRAC | 1.37 | 1.74 |
| SMRAC | 1.57 | 1.78 |
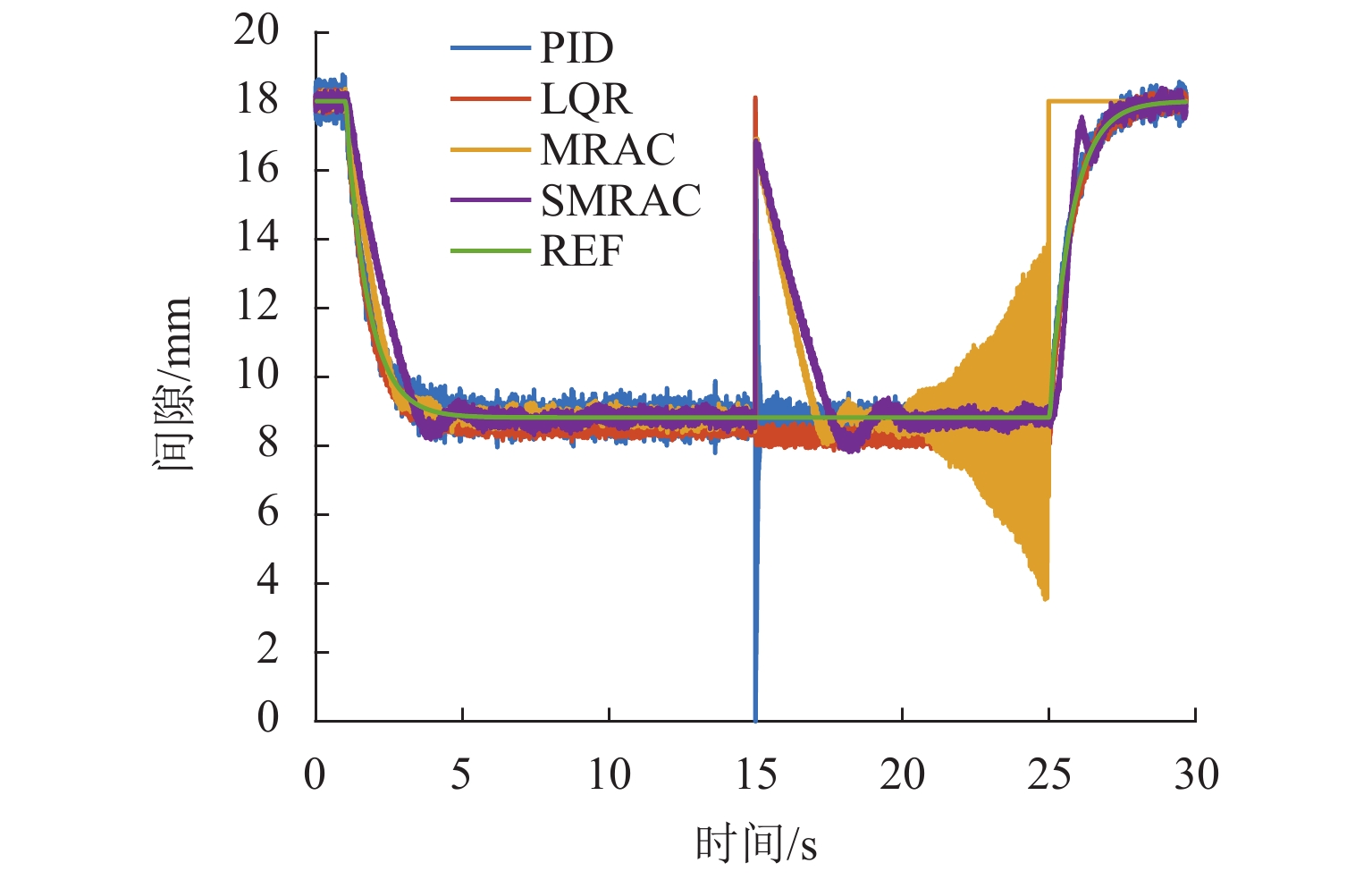
图10为悬浮架质量突变间隙仿真.
当正常悬浮时,在t=15 s时质量突然变为初始值的3倍,以此验证控制算法的鲁棒性,可以看出:PID算法和LQR算法在质量突变的时刻间隙有很大的跳变,出现打轨的现象;PID算法在稳定后依旧有很大的波动,LQR算法的稳态误差在质量变化后更大;MRAC算法在仿真时可调参数和微分后的信号未做限幅,在质量突变之后微分值很大,导致悬浮架无法稳定悬浮;相比之下SMRAC算法能够较好地跟踪输入信号,稳定时间隙波动也更小.
对本文所提算法,利用如图11所示的单悬浮架实验平台开展实验验证. 控制系统采用基于TMS320F28379D和FPGA的自制板卡,上位机安装有MATLAB/Simulink,通过CAN网络解析控制器回传的传感器信息.
在单悬浮架台架实验中,MRAC和SMRAC引入的系统状态包括间隙和加速度,设
| {x1=gap,x2=∫accdt,x3=cur, | (33) |
式中:cur为读取的电流数据,降落状态下的间隙为13.69 mm.
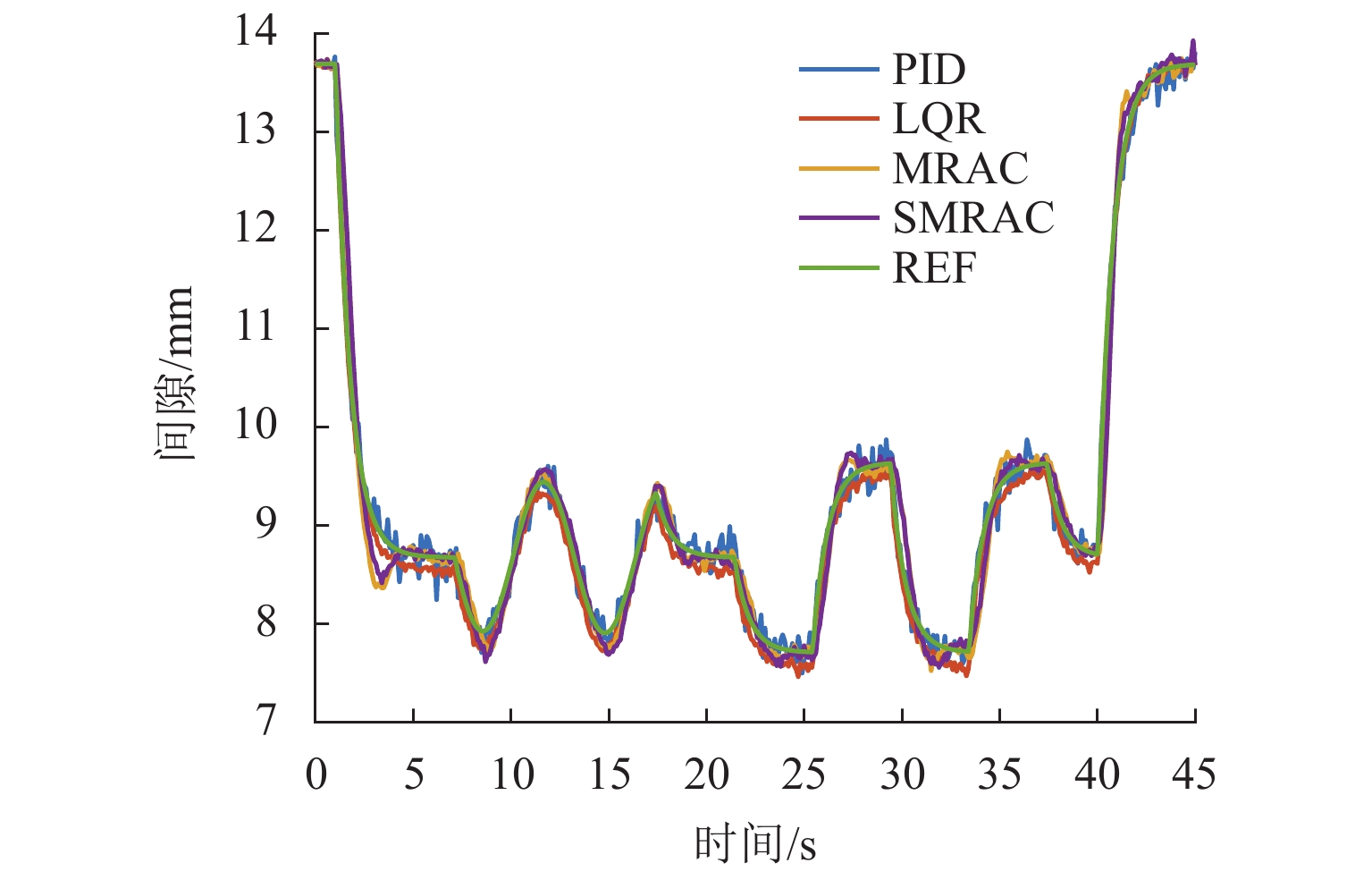
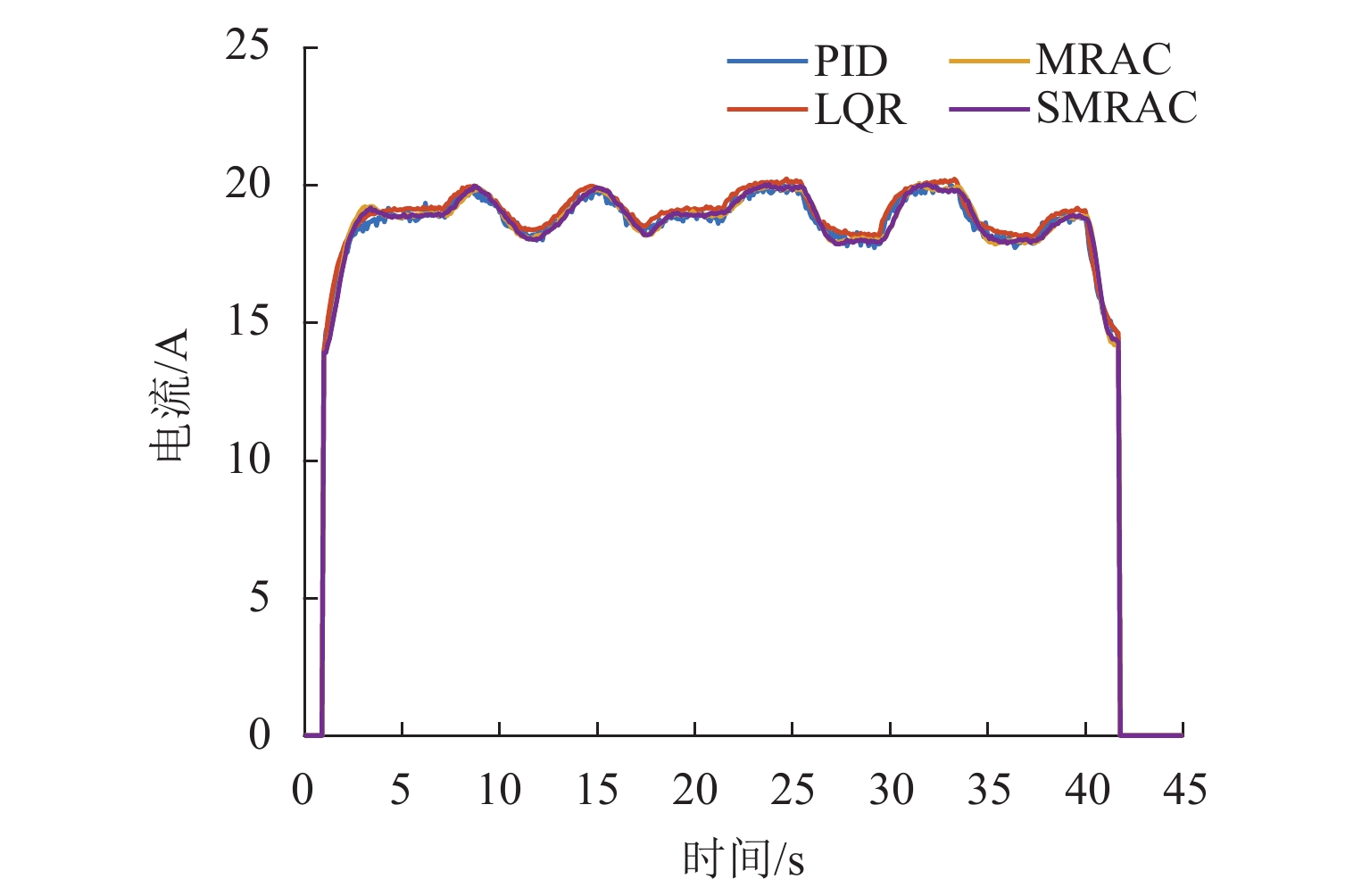
单悬浮架实测数据性能对比如表6所示,实测不同算法的上升时间和调节时间对比如表7所示,间隙变化如图12所示,电流变化如图13所示.
| 控制算法 | EITAE | EIAE | ERMSE |
| PID | 57.57 | 3.38 | 0.16 |
| LQR | 83.72 | 4.82 | 0.19 |
| MRAC | 79.78 | 4.13 | 0.22 |
| SMRAC | 77.15 | 4.15 | 0.21 |
| 控制算法 | 上升时间 | 调节时间 |
| PID | 2.20 | 2.80 |
| LQR | 1.41 | 1.70 |
| MRAC | 1.47 | 2.06 |
| SMRAC | 1.21 | 2.04 |
结果表明:SMRAC由于在输出时引入了加速度反馈,稳定时间有所增加,但是稳定时波动最小,没有超调,降落时跟踪性能也较好;4种算法电流值相差不大,说明控制算法并不能降低能耗,但是SMRAC在悬浮过程中能动态调整学习率,控制器性能更好.
本文提出的自学习模型参考自适应控制器与其他控制算法相比,具有较短的调节时间,较小的波动,且正常悬浮时有较强的鲁棒性.
在设置合理学习率的前提下,所提算法可将基于运行状态可调参数向趋于稳定的状态调整,学习率过大,收敛时间长,学习率过小,达到平衡时的波动大. 由于本文提出的算法所需要的固定参数少,在实际调试中很快就能使系统稳定,提高了控制器的适用范围.
|
中华人民共和国住房和城乡建设部. 城市建筑垃圾管理规定[Z]. 2005-06-01.
|
|
黄金荣,黄健,徐永福. 新型路堤填筑技术[M]. 上海:上海交通大学出版社,2010:18-19.
|
|
江炳茂,孙鹏,余竞. 袋装砂斜坡堤结构设计在超深淤泥软基工程中的应用[J]. 水运工程,2009(10):161-164. JIANG Binmao, SUN Peng, YU Jin. Application of sand-bagged sloping dike structural design in ultra-deep silt foundation engineering[J]. Port Waterway Engineering, 2009(10):161-164.
|
|
孙见松. 一种袋装碎石重力式挡土墙的设计理论与应用研究[D]. 湘潭:湘潭大学,2011.
|
|
MATSUOKA H, LIU Sihong. A new earth reinforcement method using soilbags[M]. London:A Balkema Publishers-Taylor Francis, 2005:1665-1670.
|
|
RESTAL S J, JACKSON L A, HEERTEN G. Case studies showing the growth and development of geotextile sand containers:an Australian perspective[J]. Geotextiles and Geomembranes, 2002, 20(5):321-342.
|
|
LI Guangxin, CHEN Yunmin, TANG Xiaowu. Geosynthetics in civil and environmental engineering[M]. Hangzhou:Zhejiang University Press Springer, 2008:7-14.
|
|
刘斯宏,白福青,汪易森. 膨胀土土工袋浸水变形及强度特性试验研究[J]. 南水北调与水利科技,2009,7(6):54-58. LIU Sihong, BAI Fuqing, WANG Yishen. Experimental study on wetting induced deformation andstrength characteristics of soilbag filled with expansive soil[J]. South to North Water Transfers and Water Science Technology, 2009, 7(6):54-58.
|
|
刘斯宏,王柳江,李卓. 土工袋加固软土地基现场荷载试验的数值模拟[J]. 水利水电科技进展,2012,32(1):78-82. LIU Sihong, WANG Liujiang, LI Zhuo. Numerical simulation of in-situ loading tests on a soilbag-reinforced soft foundation[J]. Advances in Science and Technology of Water Resources, 2012, 32(1):78-82.
|
|
刘斯宏,汪易森. 岩土新技术在南水北调工程中的应用研究[J]. 水利水电技术,2009,40(8):61-66. LIU Sihong, WANG Yisen. Application of new technologies to south-to-north water diversion project[J]. Water Resources and Hydropower Engineering, 2009, 40(8):61-66.
|
|
刘斯宏,薛向华,樊科伟,等. 土工袋柔性挡墙位移模式及土压力研究[J]. 岩土工程学报,2014,36(12):2267-2273. LIU Sihong, XUE Xianghua, FAN Kewei, et al. Earth pressure and deformation mode of a retaining wallconstructed with soilbags[J]. Chinese Journal of Geotechnical Engineering, 2014, 36(12):2267-2273.
|
|
薛向华,刘斯宏,樊科伟,等. 土工袋柔性挡土墙模型试验研究[J]. 南水北调与水利科技,2014,12(3):81-84. XUE Xianghua, LIU Sihong, FAN Kewei et al. Model test on retaining wall constructed with soilbag[J]. South to North Water Transfers and Water Science Technology, 2014, 12(3):81-84.
|
|
戴文峰,马石城,张勋武. 袋装水泥土(块)挡土墙的变形试验研究及理论分析[J]. 建筑砌块与砌块建筑,2007(5):31-33. DAI Wenfeng, MA Shicheng, ZHANG Xunwu. Deformation test study and theoretical analysis of retaining wall with sacked cement-soil (block)[J]. Building Block and Block Building, 2007(5):31-33.
|
|
左珅,刘维正,张瑞坤,等. 路堤荷载下刚柔长短桩复合地基承载特性研究[J]. 西南交通大学学报,2014,49(3):379-385. ZUO Shen, LIU Weizheng, ZHANG Ruikun, et al. Bearing behaviour of composite foundation with rigid-flexible and long-short piles under embankment load[J]. Journal of Southwest Jiaotong Universicy, 2014, 49(3):379-385.
|
|
张菊连,沈明荣,梁志荣. 不规则结构面剪切特性试验研究[J]. 西南交通大学学报,2015, 50(6):993-1000. ZHANG Julian, SHEN Mingrong, LIANG Zhirong. Experimental study on shear strength characteristics of irregular rock mass discontinuities[J]. Journal of Southwest Jiaotong Universicy, 2015, 50(6):993-1000.
|
|
马石城,张勋武,李锋. 袋装水泥土材料的力学性能试验研究[J]. 湘潭大学自然科学学报,2007,29(3):97-102. MA Shicheng, ZHANG Xunwu, LI Feng. Experimental study of mechanical properties of sacked cemented-soil[J]. Natural Science Journal of Xiangtan University, 2007, 29(3):97-102.
|
|
刘斯宏,汪易森. 土工袋技术及其应用前景[J]. 水利学报,2007,38(增刊):644-648. LIU Sihong, WANG Yishen. Reinforcement mechanism of soilbags and its applications[J]. Journal of Hydraulic Engineering, 2007, 38(Sup.):644-648.
|
|
肖建庄,郑世同,王静. 再生混凝土长龄期强度与收缩徐变性能[J]. 建筑科学与工程学报,2015(1):21-26. XIAO Jianzhuang, ZHENG Shitong, WANG Jing. Long-term strength, shrinkage and creep properties of recycled aggregate concrete[J]. Journal of Architecture and Civil Engineering, 2015(1):21-26.
|
|
贾胜伟,李晓文,刘超. 再生混凝土框架中间节点延性及耗能分析[J]. 新型建筑材料,2010(8):7-10. JIA Shengwei, Li Xiaowen, LIU Chao. Analysis of the ductility and energy dissipation of the recycled concrete frame joints[J]. New Building Materials, 2010(8):7-10.
|
|
李茂红,张雨杰,陈航,等. 粉煤灰矿渣掺量对劣级配砂配制混凝土性能的影响[J]. 西南交通大学学报,2015,50(2):342-346,353. LI Maohong, ZHANG Yujie, CHEN Hang, et al. Effect of dosage of fly ash and blast furnace slag on performance of concrete prepared with poorly graded sand[J]. Journal of Southwest Jiaotong Universicy, 2015, 50(2):342-346,353.
|
|
伍超. 公路路面再生骨料混凝土试验研究[D]. 成都:西南交通大学,2005.
|
|
刘志华. 再生混凝土粗骨料在道路中的研究[D]. 广州:广东工业大学,2014.
|
|
李德寅,王邦楣,林亚超. 结构模型实验[M]. 北京:科学出版社,1996:3-4.
|
|
卢成原,孟凡丽,王龙. 模型支盘桩的试验研究[J]. 岩土力学,2004,25(11):1803-1809. LU Chengyuan, MENG Fanli, WANG Long. Test study of model piles with branches and pates[J]. Rock and Soil Mechanics, 2004, 25(11):1803-1809.
|
|
中华人民共和国行业标准. SL237-1999土工试验规程[S]. 北京:中国水利水电出版社,1999.
|
|
李广信,张丙印,于玉贞. 土力学[M]. 北京:清华大学出版社,2013:217-252.
|
| [1] | CHEN Chunjun, CAO Yuxiao, HE Zhiying, YANG Lu. Iterative Learning Control of Interior Pressure Under Excitation of Tunnel Pressure Wave with Fixed Form[J]. Journal of Southwest Jiaotong University, 2024, 59(1): 20-28. doi: 10.3969/j.issn.0258-2724.20211026 |
| [2] | SU Qiwang, YANG Han, LI Zhili, WANG Zisong, WANG Zhuhang. Out-of-Plane Stability of Frame Hollow Brick Infilled Walls with Horizontal Slip Layers[J]. Journal of Southwest Jiaotong University, 2023, 58(2): 438-445. doi: 10.3969/j.issn.0258-2724.20210351 |
| [3] | FANG Binxin, LIU Sihong, LU Yang, CHEN Shuang, ZHANG Chengbin. Experimental Study on Vertical Bearing Capacity and Cyclic Compression Behavior of Soilbags[J]. Journal of Southwest Jiaotong University, 2023, 58(1): 210-218. doi: 10.3969/j.issn.0258-2724.20210028 |
| [4] | CHEN Qiang, DONG Guicheng, WANG Chao, ZHU Baolong, ZHAO Xiaoyan. Characteristics Analysis of Soil Arching Effect Behind Pile Based on Transparent Soil Technology[J]. Journal of Southwest Jiaotong University, 2020, 55(3): 509-517. doi: 10.3969/j.issn.0258-2724.20190744 |
| [5] | WEN Yang, CAI Junqing, CHEN Mingjun. Mechanical Behavior of Intercalation Plate Joints of Concrete-Filled Steel Tubular Wind Turbine Tower[J]. Journal of Southwest Jiaotong University, 2020, 55(2): 332-342. doi: 10.3969/j.issn.0258-2724.20180273 |
| [6] | CHEN Xiaolei, FU Jianping, GAN Jinfeng, XUE Feng. Analysis of Entire Load-Deformation Process of Shear Span Ratio Not More Than 2.0: Reinforcement of Concrete Squat Walls by Strut-Tie Model[J]. Journal of Southwest Jiaotong University, 2018, 53(4): 782-790, 805. doi: 10.3969/j.issn.0258-2724.2018.04.016 |
| [7] | JIANG Xin, CHEN Tao, WU Yu, ZHU Qijiong, GENG Jianyu, QIU Yanjun. Numerical Simulation on Stability Development of Geogrid Reinforced Widening Embankment with Rigid Retaining Wall[J]. Journal of Southwest Jiaotong University, 2018, 53(5): 1000-1008. doi: 10.3969/j.issn.0258-2724.2018.05.017 |
| [8] | ZHAN Yulin, LI Guifeng, ZHAO Renda, ZOU Zhaoyong, XUE Dengyu. Failure Mechanism and Shear Capacity of Organic Polymer Shear Connectors[J]. Journal of Southwest Jiaotong University, 2017, 30(3): 524-531. doi: 10.3969/j.issn.0258-2724.2017.03.012 |
| [9] | PAN Yi, LI Lingjiao, YAO Yunyi, WANG Huiqin. Evaluation Methods for Post-Earthquake Damage State of Ancient Masonry Buildings[J]. Journal of Southwest Jiaotong University, 2016, 29(4): 704-713. doi: 10.3969/j.issn.0258-2724.2016.04.015 |
| [10] | JIA Liang, ZHU Yanpeng, LAI Chunjing. Stability Analysis of Reinforced Earth Retaining Wall under Earthquake[J]. Journal of Southwest Jiaotong University, 2016, 29(4): 697-703. doi: 10.3969/j.issn.0258-2724.2016.04.014 |
| [11] | LIU Junxiu, CHEN Jianfeng. Mechanical Performance Analysis of Reinforced Soil Walls with Flexible/Rigid Facings[J]. Journal of Southwest Jiaotong University, 2015, 28(6): 984-992. doi: 10.3969/j.issn.0258-2724.2015.06.003 |
| [12] | FENG Kun, HE Chuan, SU Zong-Xian. Prototype Test on Failure Characteristics of Segmental Lining Structure for Nanjing Yangtze River Tunnel[J]. Journal of Southwest Jiaotong University, 2011, 24(4): 564-571. doi: 10.3969/j.issn.0258-2724.2011.04.007 |
| [13] | WANG Kui-Hua, MA Shao-Dun, TUN Wen-Bing. Active Earth Pressure of Cohesive Soil Backfill on Retailing Wall with Curved Sliding Surface[J]. Journal of Southwest Jiaotong University, 2011, 24(5): 732-738. doi: 10.3969/j.issn.0258-2724.2011.05.004 |
| [14] | WANG Jian, YAO Lingkan, JIANG Liangwei. Seismic Deformation and Failure Modes and Mechanism of Soil Mass[J]. Journal of Southwest Jiaotong University, 2010, 23(2): 196-202. doi: 10. 3969/ j. issn. 0258-2724. |
| [15] | LIU Ying, ZHANG Dai-jun. Aluminum Species and Flocculating Mechanism of Polymeric Aluminum Silicate Sulfate[J]. Journal of Southwest Jiaotong University, 2004, 17(6): 809-814. |
| 1. | 阴利利,文华,李坤鹏. 加筋重力式挡土墙承载性能研究(英文). 施工技术(中英文). 2023(02): 88-94+113 .  | |
| 2. | 李乾威,张信贵,蔡晓飞,黄辉辉. 利用装配式柔性生态挡墙技术对高空间错层区域挡土墙的优化设计. 建筑技术开发. 2023(04): 98-100 . | |
| 3. | 关晓迪,秦泽轩. 二级边坡织物袋挡墙的侧向承载特性研究. 人民珠江. 2022(11): 88-97 . | |
| 4. | 张呈斌,王建磊,樊科伟,陈爽,来志强,宋迎俊. 土工袋挡土墙模型试验及临界高度上限解. 中国农村水利水电. 2021(03): 158-162 . | |
| 5. | 董知恩,赵国兴,文华,张玉林,王梓龙,薛伟. 反包式建渣土工袋挡土墙承载性状研究. 施工技术. 2021(05): 131-135 . | |
| 6. | 中国路基工程学术研究综述·2021. 中国公路学报. 2021(03): 1-49 . | |
| 7. | 张玉林,文华,王梓龙,王学君,席茜. 加筋长度对反包式建渣土工袋挡土墙边坡支护效果的影响. 施工技术. 2020(17): 65-69+112 . | |
| 8. | 杨蒙,王建磊,宋迎俊,王涛. 土工袋挡墙变形特性有限元分析. 长江科学院院报. 2019(02): 106-110+121 . | |
| 9. | 盛涛,肖畅,李水明,金红亮. 砂袋垫层的竖向承载力试验研究. 工业建筑. 2018(06): 96-100+184 . | |
| 10. | 孙永帅,胡瑞林. 土石混合体变形破坏的基覆面效应研究. 西南交通大学学报. 2018(02): 330-336 .  本站查看 本站查看 |
CHEN Ping, SHI Tiancheng, YU Mingyue, SHAN Lei. Self-Learning Model Reference Adaptive Levitation Control Strategy[J]. Journal of Southwest Jiaotong University, 2023, 58(4): 799-807. doi: 10.3969/j.issn.0258-2724.20220752

| 参 数 | 数 值 |
| 等效质量/kg | 510 |
| 电磁铁等效内阻/Ω | 0.98 |
| 电磁铁等效电感/mH | 36 |
| 电磁铁匝数 N | 640 |
| 正对横截面积/m2 | 0.078 4 |
| 真空磁导率/(H·m−1) | 4π × 10−7 |
| 参考信号 控制器 | 正常悬浮 | 方波信号 | 正弦信号 | ||||||||
| EITAE | EIAE | ERMSE | EI | ERMSE | EIAE | ERMSE | |||||
| PID | 38.67 | 3.82 | 0.24 | 38.68 | 3.82 | 0.24 | 38.68 | 3.82 | 0.24 | ||
| LQR | 51.20 | 5.10 | 0.28 | 51.44 | 5.12 | 0.28 | 51.43 | 5.11 | 0.28 | ||
| MRAC | 16.72 | 1.69 | 0.11 | 34.34 | 3.3 | 0.22 | 164.78 | 16.44 | 0.92 | ||
| SMRAC | 19.51 | 1.97 | 0.12 | 43.23 | 4.28 | 0.27 | 128.23 | 13.37 | 0.76 | ||
| 控制算法 | 上升时间 | 调节时间 |
| PID | 1.57 | 2.03 |
| LQR | 1.40 | 1.71 |
| MRAC | 1.57 | 2.03 |
| SMRAC | 1.02 | 1.41 |
| 控制算法 | PID | LQR | MRAC | SMRAC |
| EITAE | 35.10 | 51.07 | 26.55 | 57.22 |
| EIAE | 3.54 | 5.09 | 2.70 | 7.23 |
| ERMSE | 0.22 | 0.28 | 0.17 | 0.45 |
| 控制算法 | 上升时间 | 调节时间 |
| PID | 1.84 | 2.02 |
| LQR | 1.57 | 2.02 |
| MRAC | 1.37 | 1.74 |
| SMRAC | 1.57 | 1.78 |
| 控制算法 | EITAE | EIAE | ERMSE |
| PID | 57.57 | 3.38 | 0.16 |
| LQR | 83.72 | 4.82 | 0.19 |
| MRAC | 79.78 | 4.13 | 0.22 |
| SMRAC | 77.15 | 4.15 | 0.21 |
| 控制算法 | 上升时间 | 调节时间 |
| PID | 2.20 | 2.80 |
| LQR | 1.41 | 1.70 |
| MRAC | 1.47 | 2.06 |
| SMRAC | 1.21 | 2.04 |
| 参 数 | 数 值 |
| 等效质量/kg | 510 |
| 电磁铁等效内阻/Ω | 0.98 |
| 电磁铁等效电感/mH | 36 |
| 电磁铁匝数 N | 640 |
| 正对横截面积/m2 | 0.078 4 |
| 真空磁导率/(H·m−1) | 4π × 10−7 |
| 参考信号 控制器 | 正常悬浮 | 方波信号 | 正弦信号 | ||||||||
| EITAE | EIAE | ERMSE | EI | ERMSE | EIAE | ERMSE | |||||
| PID | 38.67 | 3.82 | 0.24 | 38.68 | 3.82 | 0.24 | 38.68 | 3.82 | 0.24 | ||
| LQR | 51.20 | 5.10 | 0.28 | 51.44 | 5.12 | 0.28 | 51.43 | 5.11 | 0.28 | ||
| MRAC | 16.72 | 1.69 | 0.11 | 34.34 | 3.3 | 0.22 | 164.78 | 16.44 | 0.92 | ||
| SMRAC | 19.51 | 1.97 | 0.12 | 43.23 | 4.28 | 0.27 | 128.23 | 13.37 | 0.76 | ||
| 控制算法 | 上升时间 | 调节时间 |
| PID | 1.57 | 2.03 |
| LQR | 1.40 | 1.71 |
| MRAC | 1.57 | 2.03 |
| SMRAC | 1.02 | 1.41 |
| 控制算法 | PID | LQR | MRAC | SMRAC |
| EITAE | 35.10 | 51.07 | 26.55 | 57.22 |
| EIAE | 3.54 | 5.09 | 2.70 | 7.23 |
| ERMSE | 0.22 | 0.28 | 0.17 | 0.45 |
| 控制算法 | 上升时间 | 调节时间 |
| PID | 1.84 | 2.02 |
| LQR | 1.57 | 2.02 |
| MRAC | 1.37 | 1.74 |
| SMRAC | 1.57 | 1.78 |
| 控制算法 | EITAE | EIAE | ERMSE |
| PID | 57.57 | 3.38 | 0.16 |
| LQR | 83.72 | 4.82 | 0.19 |
| MRAC | 79.78 | 4.13 | 0.22 |
| SMRAC | 77.15 | 4.15 | 0.21 |
| 控制算法 | 上升时间 | 调节时间 |
| PID | 2.20 | 2.80 |
| LQR | 1.41 | 1.70 |
| MRAC | 1.47 | 2.06 |
| SMRAC | 1.21 | 2.04 |
 下载:
下载:



 DownLoad:
DownLoad: