

Cross Regulation Analysis of I2-Controlled Single-Inductor Dual-Output Buck LED Driver
-
摘要:
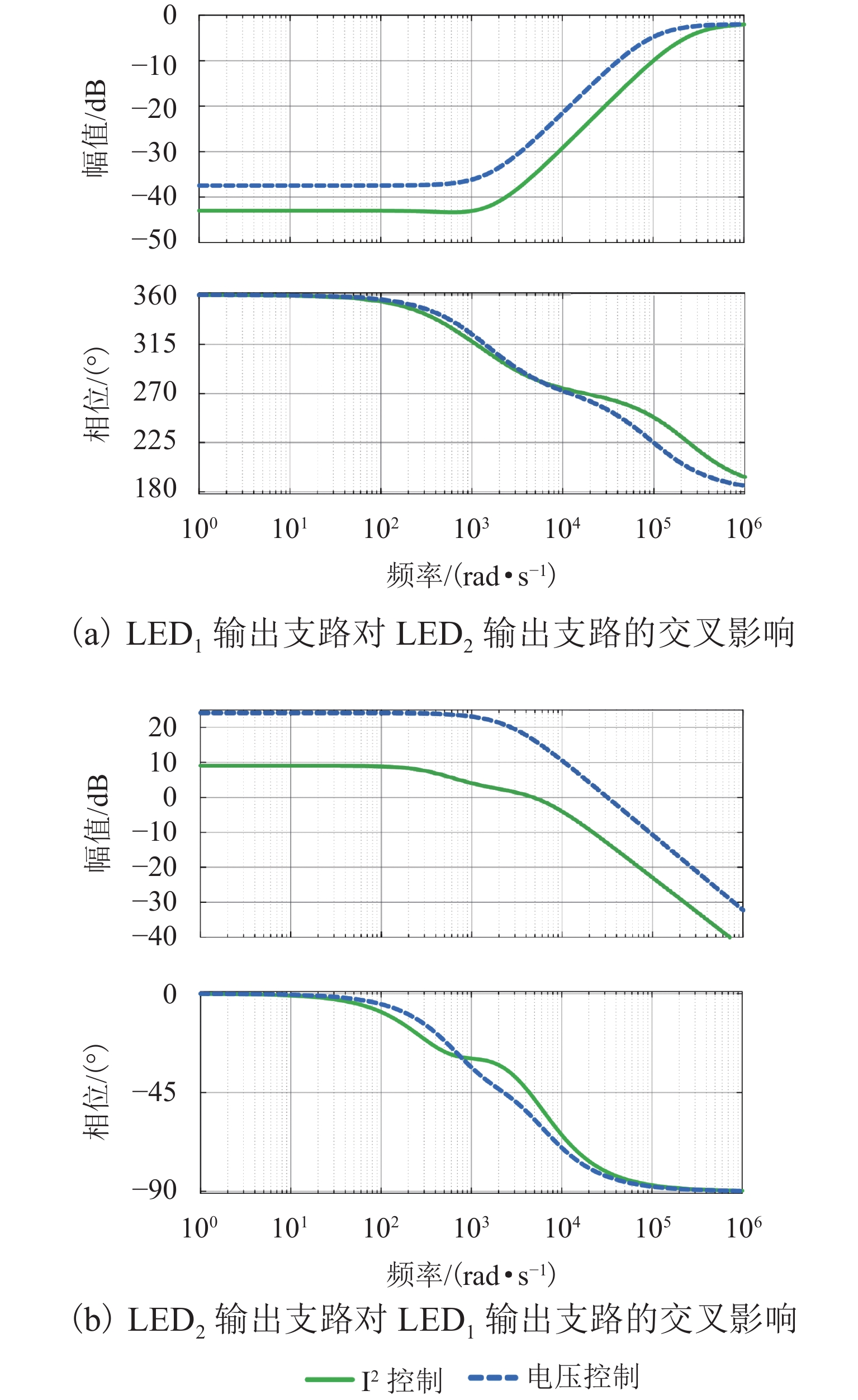
单电感双输出(single-inductor dual-output,SIDO) Buck LED驱动电源有LED1和LED2 2条输出支路,2条输出支路间存在交叉影响. 为减小工作于电感电流连续导电模式(continuous conduction mode,CCM)的SIDO Buck LED驱动电源的输出交叉影响,提出电流-电流(current-current,I2)控制SIDO Buck LED驱动电源. 基于SIDO Buck LED驱动电源的工作原理和开关状态,采用状态空间平均法建立状态空间平均模型和小信号模型;在此基础上,分析I2控制SIDO Buck LED驱动电源的电路结构和工作原理;基于电感电流纹波和输出电流纹波,推导占空比的小信号表达式,获得交叉影响传递函数;通过交叉影响传递函数Bode图,对比分析其与电压控制SIDO Buck LED驱动电源输出支路间的交叉影响. 研究结果表明:当电压控制SIDO Buck LED驱动电源LED1输出支路的参考信号分别从1.6 V突变至0.8 V和从2.4 V突变至1.2 V 时,其LED1输出支路对LED2输出支路的交叉影响分别为0.250 A和0.365 A;反之,LED2输出支路的参考信号分别从3.2 V突变至1.6 V和从2.4 V突变至1.2 V时,LED2输出支路对LED1输出支路的交叉影响分别为0.06 A和0.04 A. 参考信号相同变化条件下,I2控制SIDO Buck LED驱动电源LED1输出支路对LED2输出支路的交叉影响分别为0.090 A和0.115 A,相反,LED2输出支路对LED1输出支路的交叉影响分别为0.030 A和0.015 A. 相比电压控制SIDO Buck LED驱动电源,I2控制SIDO Buck LED驱动电源减小了输出支路间的交叉影响.
-
关键词:
- 单电感双输出 /
- Buck LED驱动电源 /
- 小信号模型 /
- 交叉影响 /
- I2控制
Abstract:The single-inductor dual-output (SIDO) Buck LED driver has two output branches, namely LED1 and LED2. Between these two output branches, there is cross regulation. In order to reduce the output cross regulation of a SIDO Buck LED driver operating in continuous conduction mode (CCM) of the inductive current, the current-current (I2)-controlled SIDO Buck LED driver was proposed. The operating principle and switch modes of the SIDO Buck LED driver were analyzed, and its state space average model and small signal model were established with the state space averaging method. Then, the circuit structure and operating principle of the I2-controlled SIDO Buck LED driver were analyzed. Based on inductive current ripple and output current ripple, the small signal expressions of duty cycle and cross regulation transfer functions were obtained. The Bode plots of the cross regulation transfer functions were employed to analyze the cross regulation compared with the output branches of the voltage-controlled SIDO Buck LED driver. The study results show that when the reference signal of LED1 of the voltage-controlled SIDO Buck LED driver steps down from 1.6 V to 0.8 V and 2.4 V to 1.2 V respectively, the cross regulation between LED1 and LED2 is 0.250 A and 0.365 A, and that of the I2-controlled SIDO Buck LED driver is 0.09 A and 0.115 A. When the reference signal of LED2 steps down from 3.2 V to 1.6 V and 2.4 V to 1.2 V respectively, the cross regulation between LED2 and LED1 is 0.06 A and 0.04 A, and that of I2-controlled SIDO Buck LED driver is 0.03 A and 0.015 A. It illustrates that the cross regulation between output branches of the I2-controlled SIDO Buck LED driver has been reduced compared with that of the voltage-controlled SIDO Buck LED driver.
-
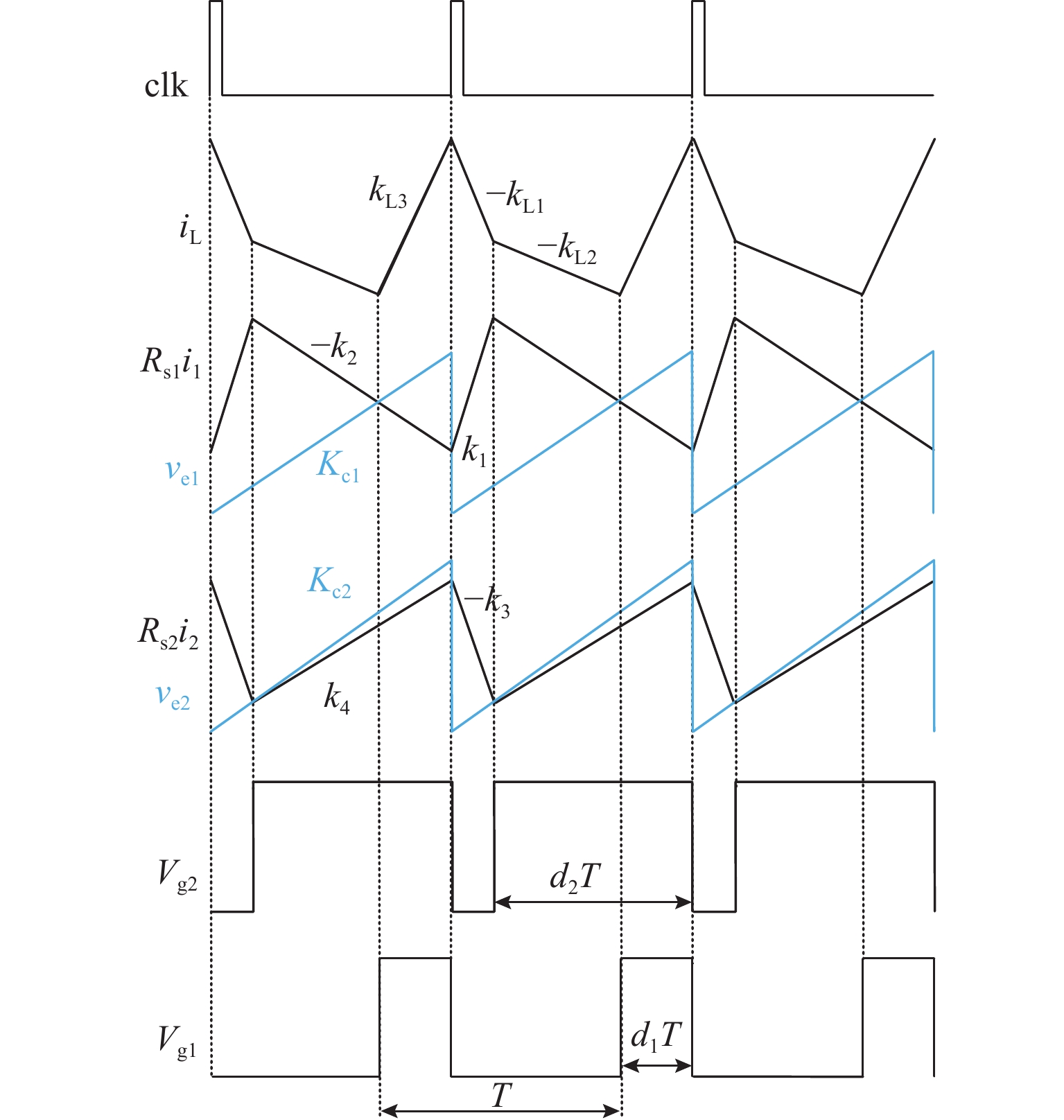
图 5 I2控制SIDO Buck LED驱动电源的控制时序
Figure 5. Control timing of I2-controlled SIDO Buck LED driver

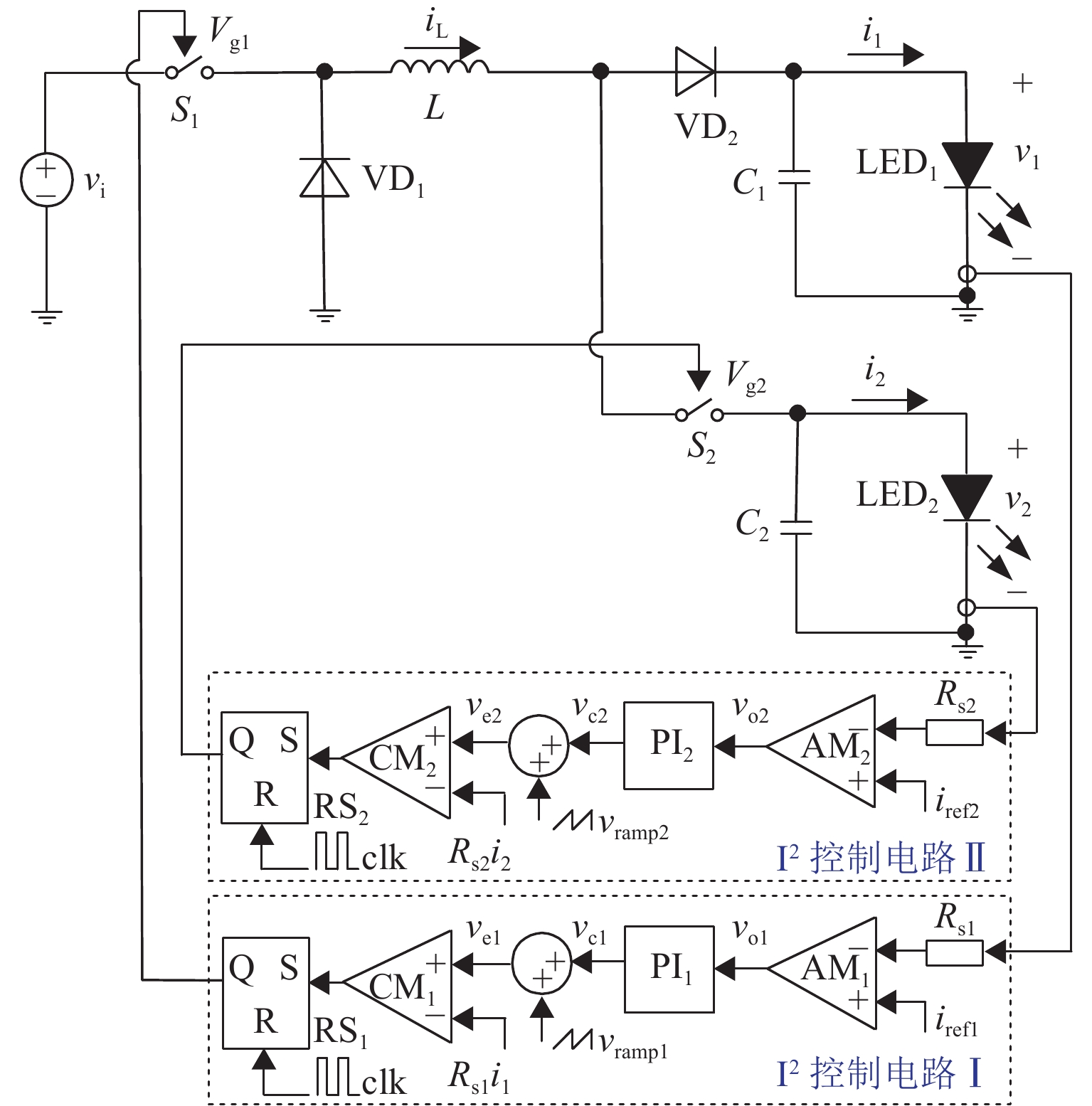
图 7 I2控制SIDO Buck LED驱动电源实验电路
Figure 7. Experimental circuit of I2-controlled SIDO Buck LED driver

图 8 iref1突变,输出电流实验波形
Figure 8. Experiment waveforms of output current with various iref1

图 9 iref2突变,输出电流实验波形
Figure 9. Experiment waveforms of output current with various iref2
表 1 I2控制SIDO Buck LED驱动电源电路参数
Table 1. Circuit parameters of I2-controlled SIDO Buck LED driver
参数 取值 参数 取值 vi/V 10 Rs1,Rs2/Ω 4.0 v1/V 5.6 Rd1/Ω 1.0 v2/V 3.1 Rd2/Ω 0.5 i1/A 0.2 kp1 4.0 i2/A 0.8 kp2 0.8 C1/μF 100 ki1 3500 C2/μF 100 ki2 750 L/μH 100 Kc1 1×105 f/kHz 50 Kc2 2×105  下载: 导出CSV
下载: 导出CSV
表 2 交叉影响实验对比结果
Table 2. Experimental results of cross regulation
参考信号 信号变化/V I2 控制/A 电压控制/A iref1 2.4→1.2 0.115 0.365 iref1 1.6→0.8 0.090 0.250 iref2 3.2→1.6 0.030 0.060 iref2 2.4→1.2 0.015 0.040
下载: 导出CSV
-
[1] 汪飞,钟元旭,阮毅. AC-DC LED 驱动电源消除电解电容技术综述[J]. 电工技术学报,2015,30(8): 176-185.WANG Fei, ZHONG Yuanxu, RUAN Yi. A review of eliminating electrolytic capacitor in AC-DC light-emitting diode drivers[J]. Transactions of China Electrotechnical Society, 2015, 30(8): 176-185. [2] 胡进,吕征宇,林辉品,等. LED照明应用现状特征及驱动技术发展综述[J]. 电源学报,2018,16(1): 135-144.HU Jin, LYU Zhengyu, LIN Huipin, et al. Review on characteristics of LED lighting applications and trends of LED driving technologies[J]. Journal of Power Supply, 2018, 16(1): 135-144. [3] 王瑶. 电容电流-电容电压纹波控制单电感双输出CCM Buck变换器[J]. 中国电机工程学报,2020,40(10): 3280-3288.WANG Yao. Capacitor current and capacitor voltage ripple controlled single-inductor dual-output CCM Buck converter[J]. Proceedings of the CSEE, 2020, 40(10): 3280-3288. [4] LIU X S, XU J P, WANG J P, et al. A single-inductor dual-output buck converter with pulse-train control[C]// The 2nd IEEE International Symposium on Power Electronics for Distributed Generation Systems. Hefei: IEEE, 2010: 449-452. [5] WANG Y, XU J P, ZHOU G H. A cross regulation analysis for single-inductor dual-output CCM Buck converters[J]. IEEE Journal of Power Electronics, 2016, 16(5): 1802-1812. doi: 10.6113/JPE.2016.16.5.1802 [6] TREVISAN D, MATTAVELLI P, TENTI P. Digital control of single-inductor multiple-output step-down DC−DC converters in CCM[J]. IEEE Transactions on Industrial Electronics, 2008, 55(9): 3476-3483. doi: 10.1109/TIE.2008.921234 [7] GUO Y, LI S N, LEE A T L, et al. Single-stage AC/DC single-inductor multiple-output LED drivers[J]. IEEE Transactions on Power Electronics, 2016, 31(8): 5837-5850. doi: 10.1109/TPEL.2015.2496247 [8] SEOL K S, WOO Y J, CHO G H, et al. A synchronous multioutput step-up/down DC−DC converter with return current control[J]. IEEE Transactions on Circuits and Systems Ⅱ: Express Briefs, 2009, 56(3): 210-214. doi: 10.1109/TCSII.2009.2015372 [9] CHEN H, ZHANG Y, MA D S. A SIMO parallel-string driver IC for dimmable LED backlighting with local bus voltage optimization and single time-shared regulation loop[J]. IEEE Transactions on Power Electronics, 2012, 27(1): 452-462. doi: 10.1109/TPEL.2011.2160404 [10] BENTO F, CARDOSO A J M. Sensorless current control of large-scale LED lighting systems based on SIMO LED drivers[C]//The 45th Annual Conference of the IEEE Industrial Electronics Society (IECON). Lisbon: IEEE, 2019: 4280-4285. [11] ZHANG Y M, RONG G J, QU S S, et al. A high-power LED driver based on single inductor-multiple output DC−DC converter with high dimming frequency and wide dimming range[J]. IEEE Transactions on Power Electronics, 2020, 35(8): 8501-8511. doi: 10.1109/TPEL.2020.2971207 [12] QU Y, WANG Z. Soft-switching techniques for single-inductor multiple-output LED drivers[J]. IEEE Transactions on Power Electronics, 2020, 35(12): 13748-13756. doi: 10.1109/TPEL.2020.2996376 [13] CHEN L, XU L M, ZHANG L Y, et al. Cross regulation analysis of voltage-mode controlled SIDO buck LED driver[C]//2021 IEEE 16th Conference on Industrial Electronics and Applications. Chengdu: IEEE, 2021: 1868-1871. [14] LI S N, GUO Y, TAN S C, et al. An off-line single-inductor multiple-output LED driver with high dimming precision and full dimming range[J]. IEEE Transactions on Power Electronics, 2017, 32(6): 4716-4727. doi: 10.1109/TPEL.2016.2597237 [15] KIM H C, YOON C S, JEONG D K, et al. A single-inductor, multiple-channel current-balancing LED driver for display backlight applications[J]. IEEE Transactions on Industry Applications, 2014, 50(6): 4077-4081. doi: 10.1109/TIA.2014.2346707 [16] MODEPALLI K, PARSA L. A scalable N-color LED driver using single inductor multiple current output topology[J]. IEEE Transactions on Power Electronics, 2016, 31(5): 3773-3783. doi: 10.1109/TPEL.2015.2444853 [17] YANG W H, YANG H A, HUANG C J, et al. A high-efficiency single-inductor multiple-output buck-type LED driver with average current correction technique[J]. IEEE Transactions on Power Electronics, 2018, 33(4): 3375-3385. doi: 10.1109/TPEL.2017.2709039 [18] 方晶璐,牛萍娟,田慧娟. 电流对LED特性参数的影响[J]. 电工技术学报,2013,28(增2): 234-238.FANG Jinglu, NIU Pingjuan, TIAN Huijuan. The influence on characteristics parameters for white-LED with current[J]. Transactions of China Electrotechnical Society, 2013, 28(S2): 234-238. [19] 王瑶. 基于状态空间平均模型的电压控制SIDO Buck变换器稳定性分析[J]. 中国电机工程学报,2018,38(6): 1810-1817,1918.WANG Yao. Stability analysis for voltage controlled single-inductor dual-output buck converter based on state space average model[J]. Proceedings of the CSEE, 2018, 38(6): 1810-1817,1918. -

 下载:
下载:

 点击查看大图
点击查看大图
计量
- 文章访问数: 408
- HTML全文浏览量: 382
- PDF下载量: 55
- 被引次数: 0